Polarization Properties of Reflection and Transmission for Oceanographic Lidar Propagating through Rough Sea Surfaces


Abstract
Featured Application
Abstract
1. Introduction
2. Theory and Modeling
2.1. Modeling of a Wind-Blown Rough Sea Surface
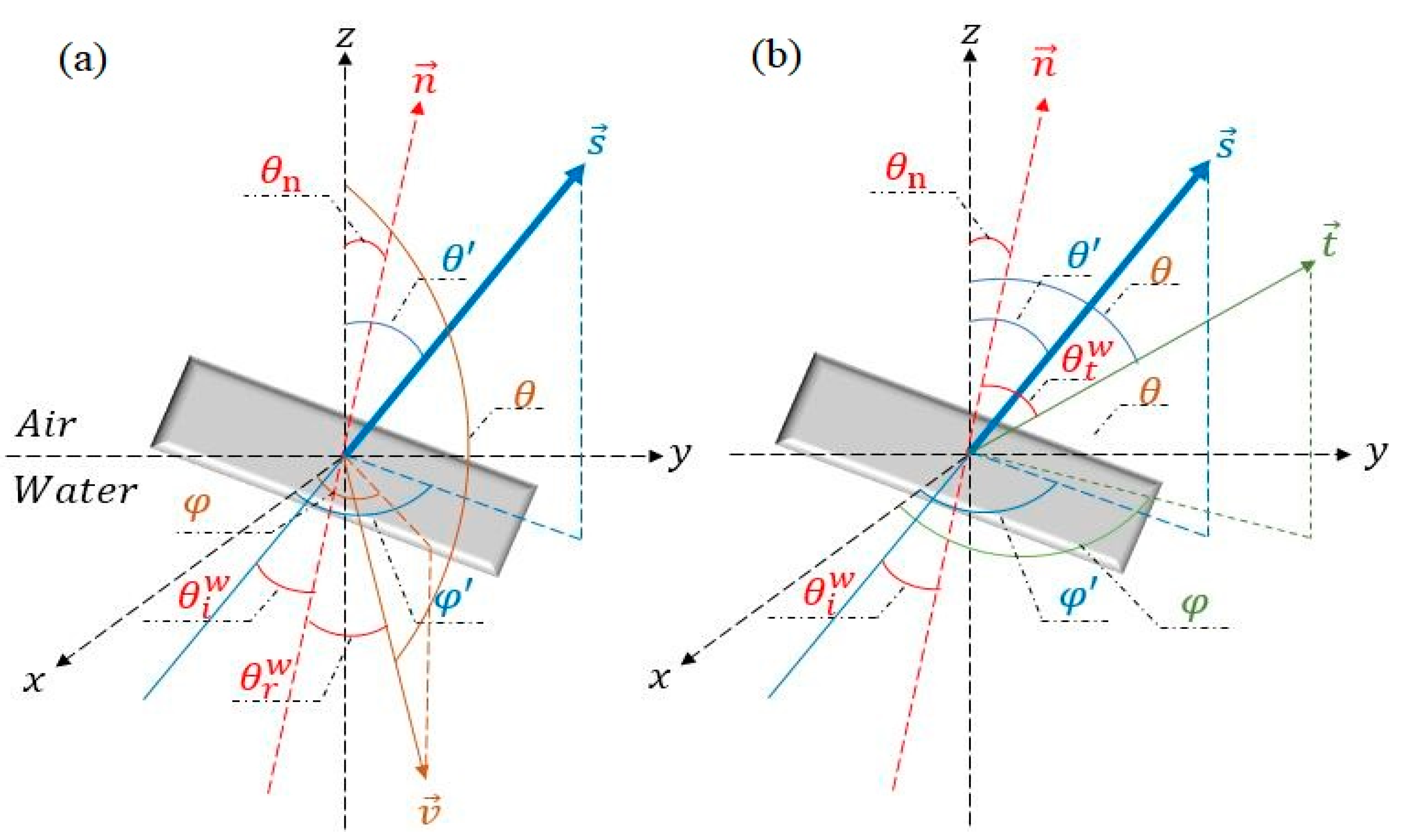
2.2. The Reflection Matrix of Wave Facets
2.3. The Transmission Matrix of Wave Facets
2.4. The Integration of Raa, Rww, Taw, and Twa
2.5. Polarization and Depolarization of Reflection and Transmission
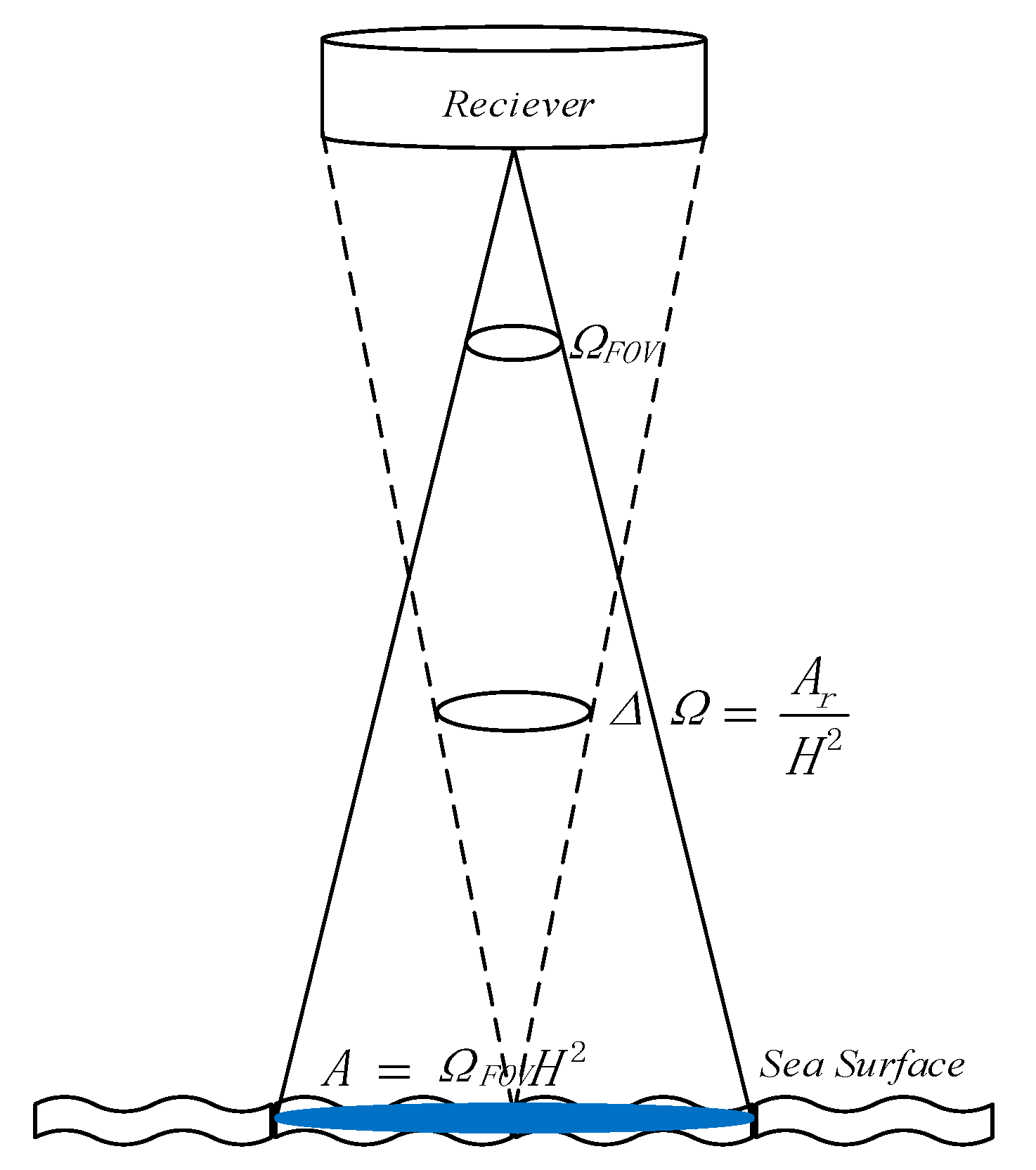
2.6. Simulation Model Coupled with Lidar System
3. Simulation Results
3.1. Model Validation
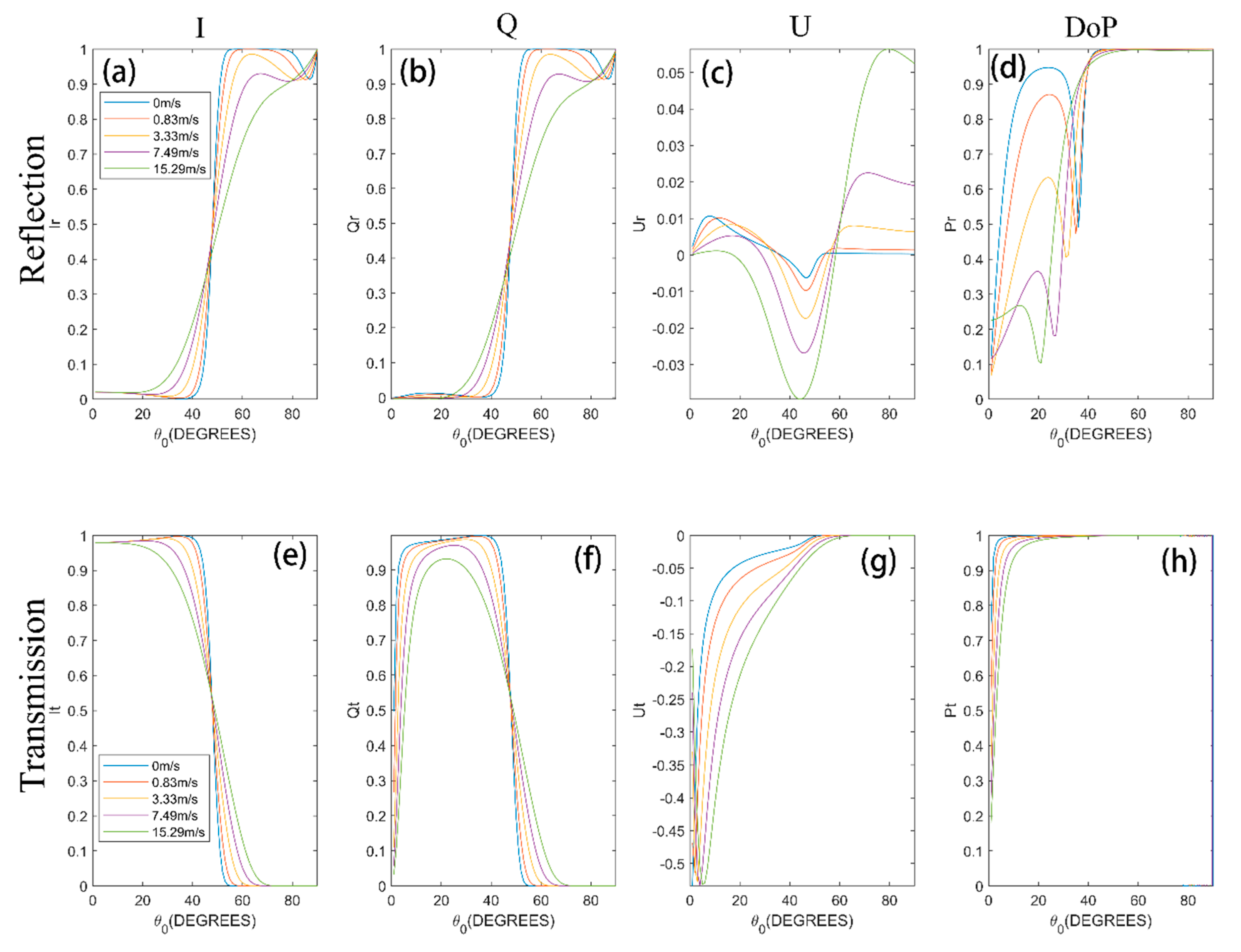
3.2. Sea Surface Reflection and Transmission of Lidar
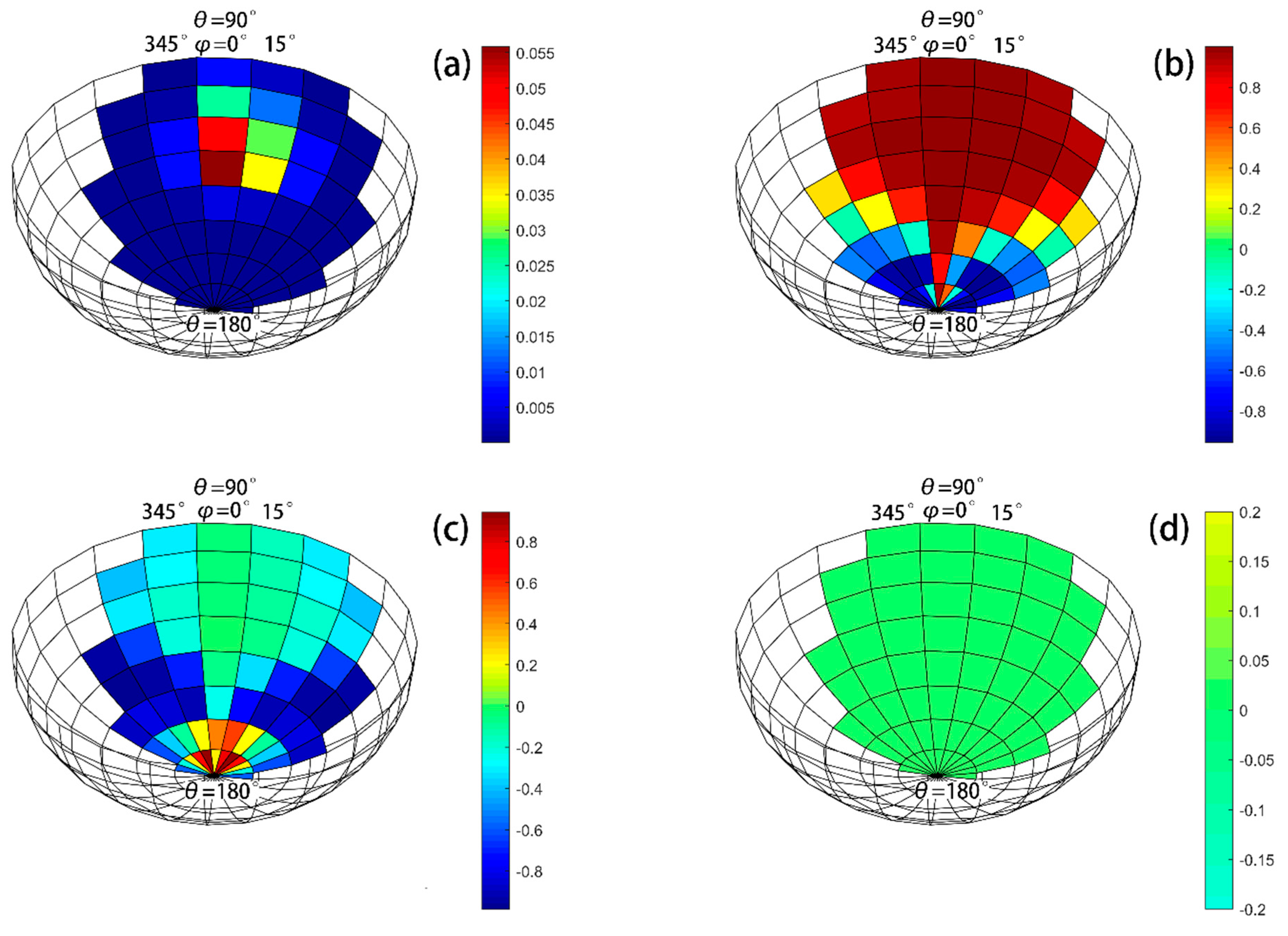
3.3. Air-Incident Reflection Pattern
3.4. Air-Incident Transmission Pattern
3.5. Water-Incident Reflection Pattern
3.6. Water-Incident Transmission Pattern
3.7. Depolarization of Reflection and Transmission
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. The detailed calculation of , , , and
References
- Churnside, J.H.; Marchbanks, R.D. Subsurface plankton layers in the Arctic Ocean. Geophys. Res. Lett. 2015, 42, 4896–4902. [Google Scholar] [CrossRef]
- Churnside, J.H.; Donaghay, P.L. Thin scattering layers observed by airborne lidar. ICES J. Mar. Sci. J. Cons. 2009, 66, 778–789. [Google Scholar] [CrossRef]
- Liu, H.; Chen, P.; Mao, Z.; Pan, D.; He, Y. Subsurface plankton layers observed from airborne lidar in Sanya Bay, South China Sea. Opt. Express 2018, 26, 29134–29147. [Google Scholar] [CrossRef]
- Chen, P.; Pan, D. Ocean Optical Profiling in South China Sea Using Airborne LiDAR. Remote Sens. 2019, 11, 1826. [Google Scholar] [CrossRef]
- Churnside, J.H.; Marchbanks, R.D. Inversion of oceanographic profiling lidars by a perturbation to a linear regression. Appl. Opt. 2017, 56, 5228–5233. [Google Scholar] [CrossRef] [PubMed]
- Churnside, J.; Hair, J.; Hostetler, C.; Scarino, A. Ocean Backscatter Profiling Using High-Spectral-Resolution Lidar and a Perturbation Retrieval. Remote Sens. 2018, 10, 2003. [Google Scholar] [CrossRef]
- Chen, P.; Pan, D.; Mao, Z.; Liu, H. A Feasible Calibration Method for Type 1 Open Ocean Water LiDAR Data Based on Bio-Optical Models. Remote Sens. 2019, 11, 172. [Google Scholar] [CrossRef]
- Saylam, K.; Brown, R.A.; Hupp, J.R. Assessment of depth and turbidity with airborne Lidar bathymetry and multiband satellite imagery in shallow water bodies of the Alaskan North Slope. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 191–200. [Google Scholar] [CrossRef]
- Richter, K.; Maas, H.-G.; Westfeld, P.; Weiß, R. An Approach to Determining Turbidity and Correcting for Signal Attenuation in Airborne Lidar Bathymetry. PFG—J. Photogramm. Remote Sens. Geoinf. Sci. 2017, 85, 31–40. [Google Scholar] [CrossRef]
- Churnside, J.H. Polarization effects on oceanographic lidar. Opt Express 2008, 16, 1196–1207. [Google Scholar] [CrossRef]
- Hostetler, C.A.; Behrenfeld, M.J.; Hu, Y.; Hair, J.W.; Schulien, J.A. Spaceborne Lidar in the Study of Marine Systems. Annu. Rev. Mar. Sci. 2018, 10, 121–147. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.; Pan, D.; Mao, Z.; Liu, H. Semi-Analytic Monte Carlo Model for Oceanographic Lidar Systems: Lookup Table Method Used for Randomly Choosing Scattering Angles. Appl. Sci. 2018, 9, 48. [Google Scholar] [CrossRef]
- Otsuki, S. Multiple scattering of polarized light in turbid infinite planes: Monte Carlo simulations. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2016, 33, 988–996. [Google Scholar] [CrossRef]
- Chen, P.; Pan, D.; Mao, Z.; Liu, H. Semi-analytic Monte Carlo radiative transfer model of laser propagation in inhomogeneous sea water within subsurface plankton layer. Opt. Laser Technol. 2019, 111, 1–5. [Google Scholar] [CrossRef]
- Abdallah, H.; Bailly, J.S.; Baghdadi, N.N.; Saint-Geours, N.; Fabre, F. Potential of Space-Borne LiDAR Sensors for Global Bathymetry in Coastal and Inland Waters. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 202–216. [Google Scholar] [CrossRef]
- Abdallah, H.; Baghdadi, N.; Bailly, J.-S.; Pastol, Y.; Fabre, F. Wa-LiD: A new LiDAR simulator for waters. Geosci. Remote Sens. Lett. IEEE 2012, 9, 744–748. [Google Scholar] [CrossRef]
- Jamet, C.; Ibrahim, A.; Ahmad, Z.; Angelini, F.; Babin, M.; Behrenfeld, M.J.; Boss, E.; Cairns, B.; Churnside, J.; Chowdhary, J.; et al. Going Beyond Standard Ocean Color Observations: Lidar and Polarimetry. Front. Mar. Sci. 2019, 6. [Google Scholar] [CrossRef]
- Chami, M.; Lafrance, B.; Fougnie, B.; Chowdhary, J.; Harmel, T.; Waquet, F. OSOAA: A vector radiative transfer model of coupled atmosphere-ocean system for a rough sea surface application to the estimates of the directional variations of the water leaving reflectance to better process multi-angular satellite sensors data over the ocean. Opt Express 2015, 23, 27829–27852. [Google Scholar] [CrossRef]
- Mobley, C.D. Polarized reflectance and transmittance properties of windblown sea surfaces. Appl. Opt. 2015, 54, 4828–4849. [Google Scholar] [CrossRef]
- Zhai, P.-W.; Hu, Y.; Chowdhary, J.; Trepte, C.R.; Lucker, P.L.; Josset, D.B. A vector radiative transfer model for coupled atmosphere and ocean systems with a rough interface. J. Quant. Spectrosc. Radiat. Transf. 2010, 111, 1025–1040. [Google Scholar] [CrossRef]
- Rozanov, V.V.; Dinter, T.; Rozanov, A.V.; Wolanin, A.; Bracher, A.; Burrows, J.P. Radiative transfer modeling through terrestrial atmosphere and ocean accounting for inelastic processes: Software package SCIATRAN. J. Quant. Spectrosc. Radiat. Transf. 2017, 194, 65–85. [Google Scholar] [CrossRef]
- Deuzé, J.L.; Herman, M.; Santer, R. Fourier series expansion of the transfer equation in the atmosphere-ocean system. J. Quant. Spectrosc. Radiat. Transf. 1989, 41, 483–494. [Google Scholar] [CrossRef]
- Hieronymi, M. Polarized reflectance and transmittance distribution functions of the ocean surface. Opt Express 2016, 24, A1045–A1068. [Google Scholar] [CrossRef] [PubMed]
- D’Alimonte, D.; Kajiyama, T. Effects of light polarization and waves slope statistics on the reflectance factor of the sea surface. Opt Express 2016, 24, 7922–7942. [Google Scholar] [CrossRef]
- Cox, C.; Munk, W. Statistics of the sea surface derived from Sun glitter. J. Mar. Res. 1954, 13, 198–227. [Google Scholar]
- Cox, C.; Munk, W. Measurement of the Roughness of the Sea Surface from Photographs of the Sun’s Glitter. J. Opt. Soc. Am. 1954, 44. [Google Scholar] [CrossRef]
- Sancer, M. Shadow-corrected electromagnetic scattering from a randomly rough surface. IEEE Trans. Antennas Propag. 1969, 17, 577–585. [Google Scholar] [CrossRef]
- Smith, B. Geometrical shadowing of a random rough surface. IEEE Trans. Antennas Propag. 1967, 15, 668–671. [Google Scholar] [CrossRef]
- Poole, L.R.; Venable, D.D.; Campbell, J.W. Semianalytic Monte Carlo radiative transfer model for oceanographic lidar systems. Appl. Opt. 1981, 20, 3653–3656. [Google Scholar] [CrossRef]
- Nakajima, T.; Tanaka, M. Effect of wind-generated waves on the transfer of solar radiation in the atmosphere-ocean system. J. Quant. Spectrosc. Radiat. Transf. 1983, 29, 521–537. [Google Scholar] [CrossRef]
- Ebuchi, N.; Kizu, S. Probability distribution of surface wave slope derived using Sun glitter images from geostationary meteorological satellite and surface vector winds from scatterometers. J. Oceanogr. 2002, 58, 477–486. [Google Scholar] [CrossRef]
- Lenoble, J.; Herman, M.; Deuzé, J.L.; Lafrance, B.; Santer, R.; Tanré, D. A successive order of scattering code for solving the vector equation of transfer in the earth’s atmosphere with aerosols. J. Quant. Spectrosc. Radiat. Transf. 2007, 107, 479–507. [Google Scholar] [CrossRef]
- Mishchenko, M.I.; Travis, L.D. Satellite retrieval of aerosol properties over the ocean using polarization as well as intensity of reflected sunlight. J. Geophys. Res. Atmos. 1997, 102, 16989–17013. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| W (m/s) | R2 | RMSE | MaxAD | MaxAPD | MAD | MAPD | |
|---|---|---|---|---|---|---|---|
| Air-incident | 0 | 0.9938 | 0.0491 | 0.2513 | 25.4646% | 0.0143 | 2.3642% |
| 0.83 | 0.9998 | 0.0138 | 0.0599 | 8.4826% | 0.0054 | 1.5342% | |
| 3.33 | 1.0000 | 0.0044 | 0.0178 | 3.4032% | 0.0020 | 0.8736% | |
| 7.49 | 1.0000 | 0.0013 | 0.0049 | 1.2275% | 0.0006 | 0.3722% | |
| 15.29 | 1.0000 | 0.0002 | 0.0006 | 0.1988% | 0.0001 | 0.0677% | |
| Water-incident | 0 | 0.9952 | 0.0489 | 0.2926 | 59.9937% | 0.0188 | 5.0894% |
| 0.83 | 0.9995 | 0.0155 | 0.0543 | 25.1187% | 0.0085 | 2.9464% | |
| 3.33 | 0.9999 | 0.0059 | 0.0154 | 9.1151% | 0.0041 | 1.5886% | |
| 7.49 | 1.0000 | 0.0025 | 0.0062 | 3.0189% | 0.0017 | 0.6922% | |
| 15.29 | 1.0000 | 0.0005 | 0.0010 | 0.3833% | 0.0003 | 0.1180% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Chen, P.; Mao, Z.; Pan, D. Polarization Properties of Reflection and Transmission for Oceanographic Lidar Propagating through Rough Sea Surfaces. Appl. Sci. 2020, 10, 1030. https://doi.org/10.3390/app10031030
Zhang Z, Chen P, Mao Z, Pan D. Polarization Properties of Reflection and Transmission for Oceanographic Lidar Propagating through Rough Sea Surfaces. Applied Sciences. 2020; 10(3):1030. https://doi.org/10.3390/app10031030
Chicago/Turabian StyleZhang, Zhenhua, Peng Chen, Zhihua Mao, and Delu Pan. 2020. "Polarization Properties of Reflection and Transmission for Oceanographic Lidar Propagating through Rough Sea Surfaces" Applied Sciences 10, no. 3: 1030. https://doi.org/10.3390/app10031030
APA StyleZhang, Z., Chen, P., Mao, Z., & Pan, D. (2020). Polarization Properties of Reflection and Transmission for Oceanographic Lidar Propagating through Rough Sea Surfaces. Applied Sciences, 10(3), 1030. https://doi.org/10.3390/app10031030