Design and Modeling of a Parent Big STAR Robot Platform That Carries a Child RSTAR


Abstract
1. Introduction
2. Design and Manufacturing
2.1. Robotic Design
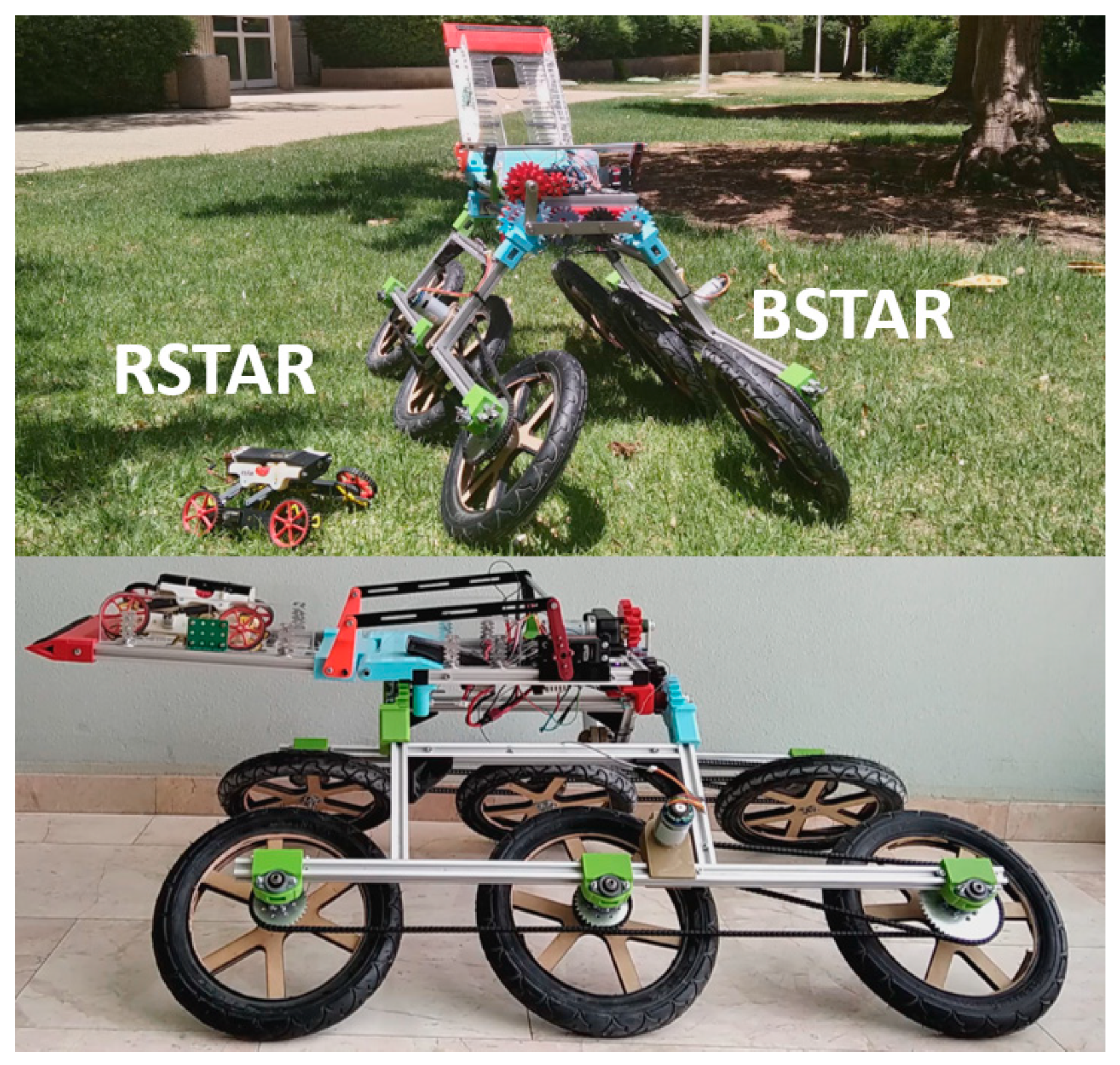
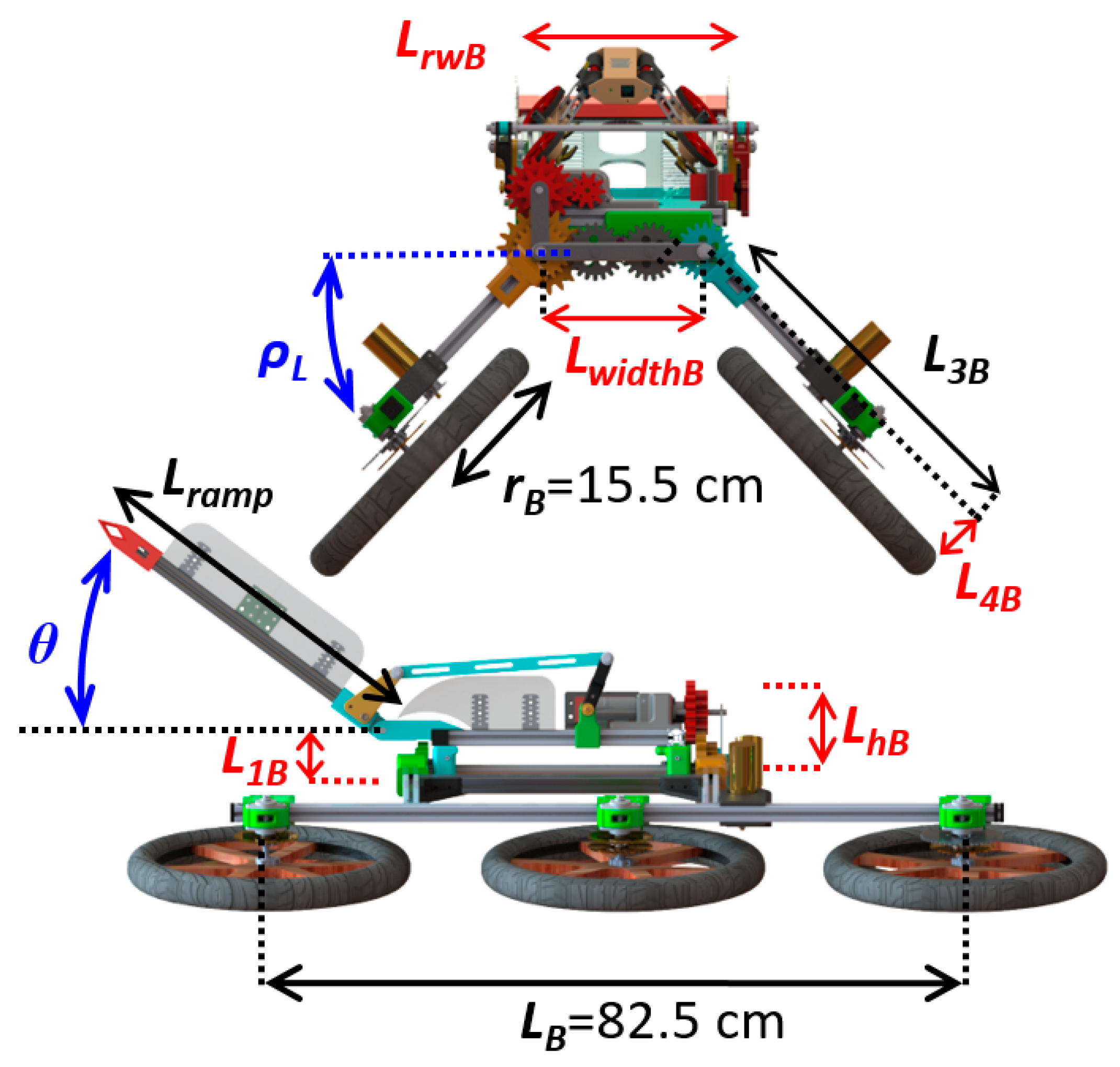
2.1.1. The Big STAR (BSTAR—The Parent Robot)
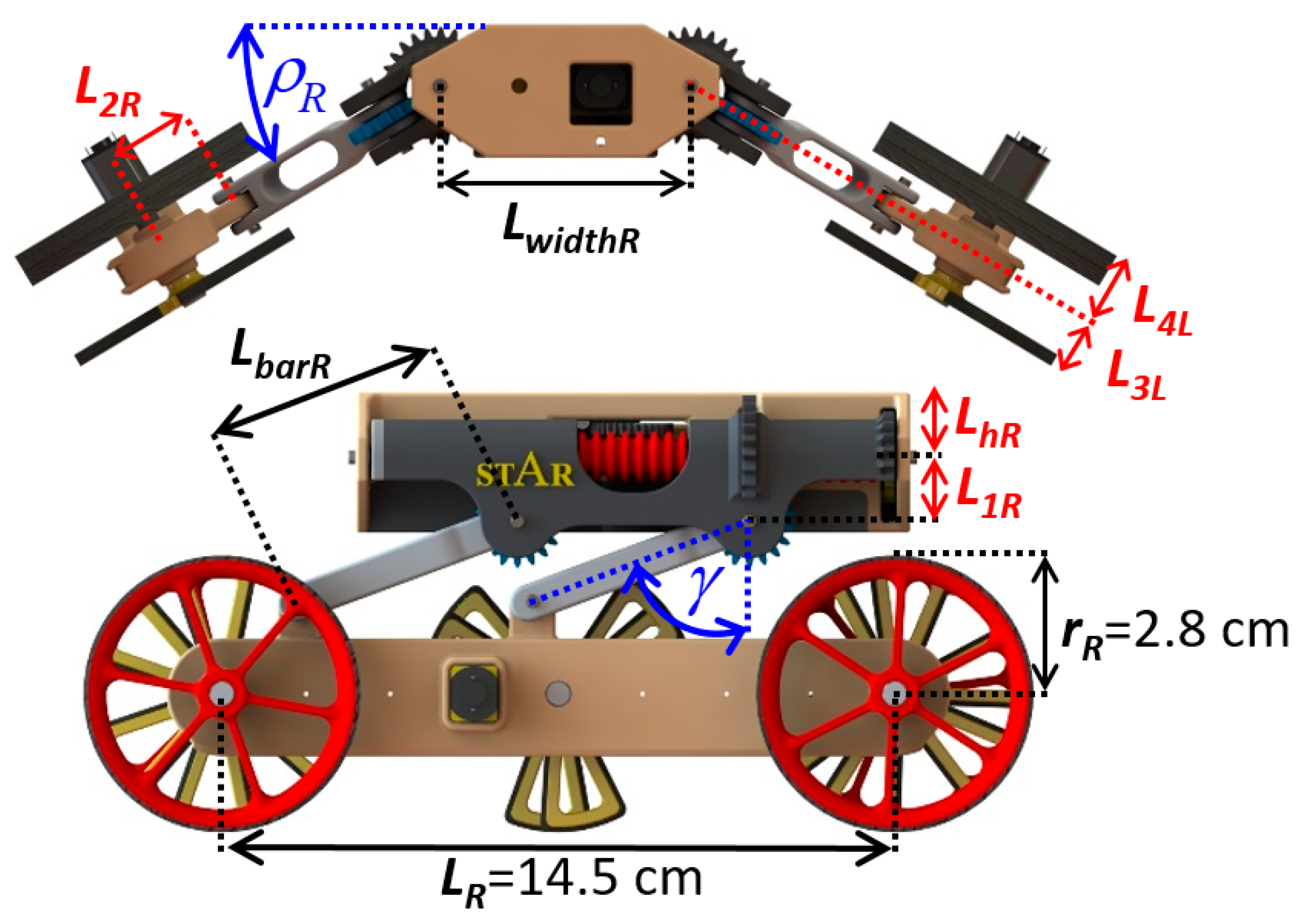
2.1.2. The Rising STAR (RSTAR—The Child Robot)
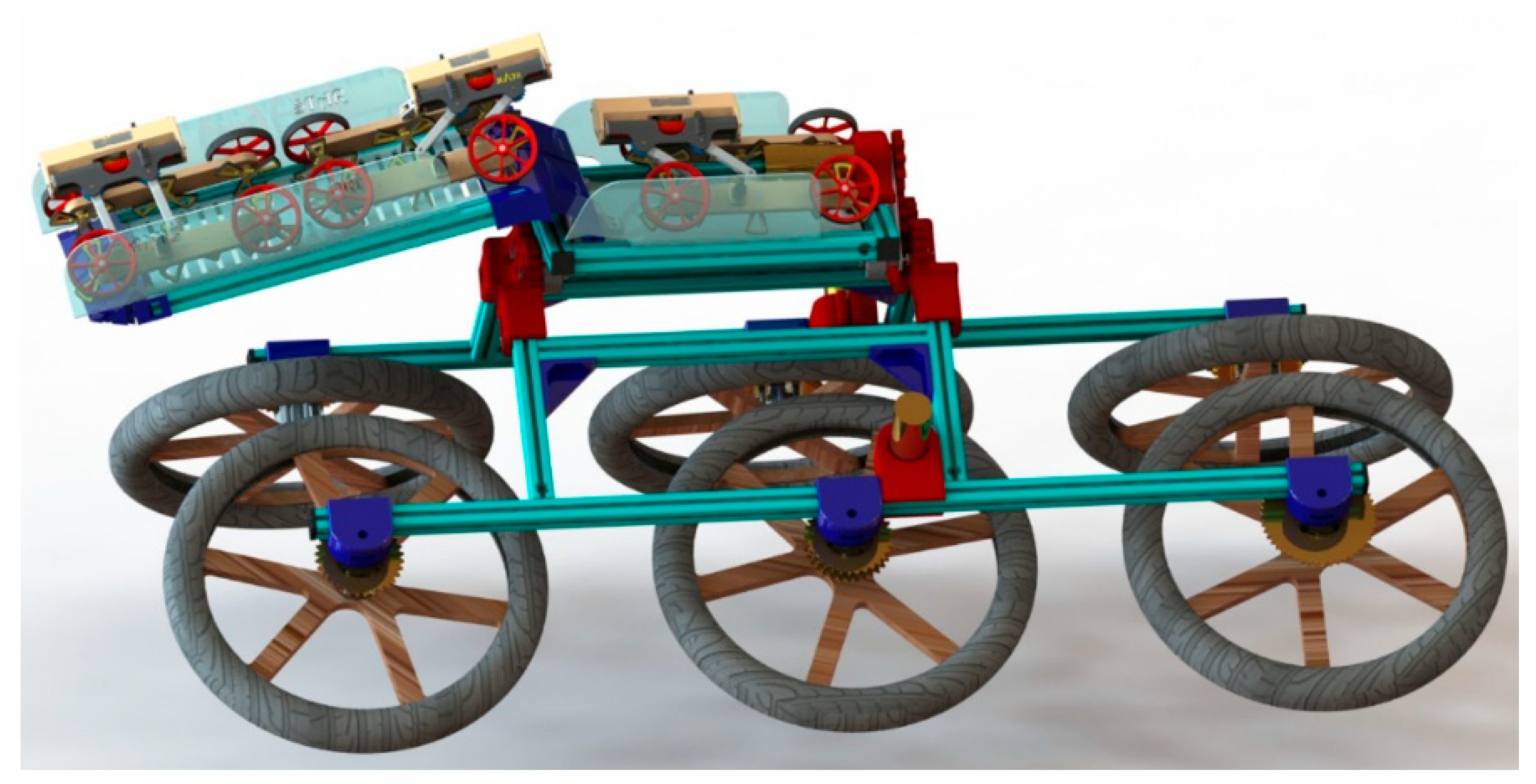
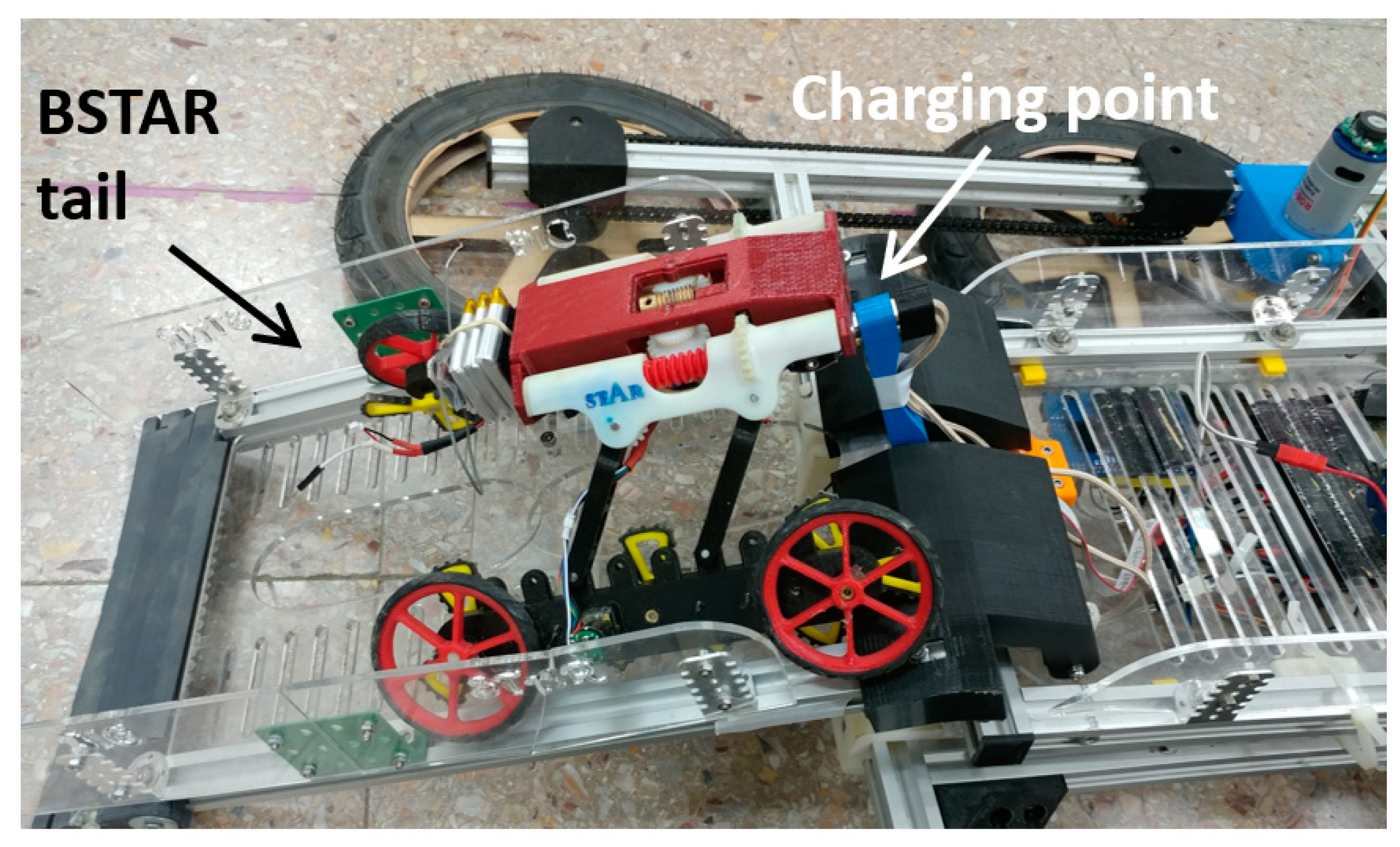
2.1.3. The Robots’ Interface
2.2. Actuation and Control
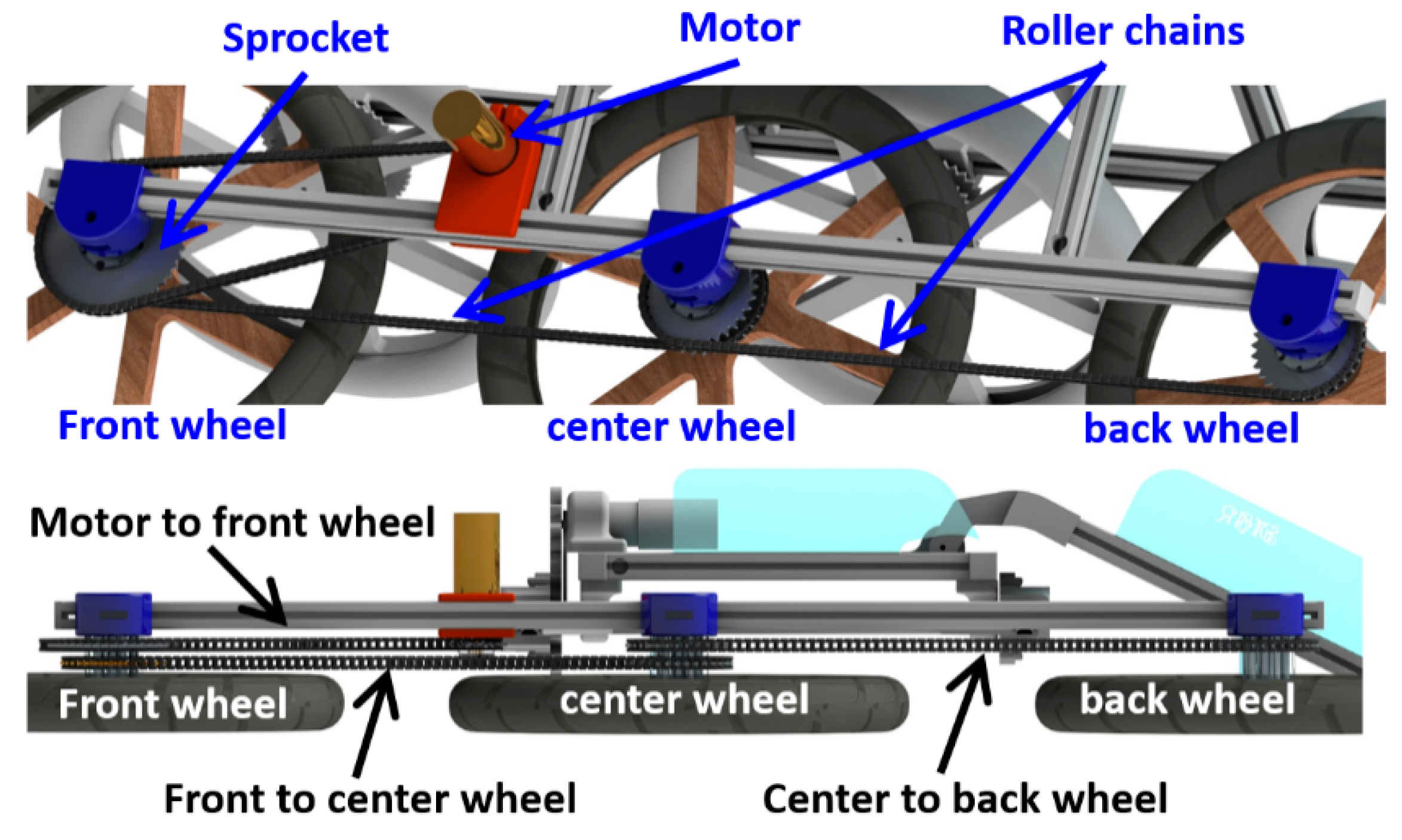
2.2.1. Driving Wheels
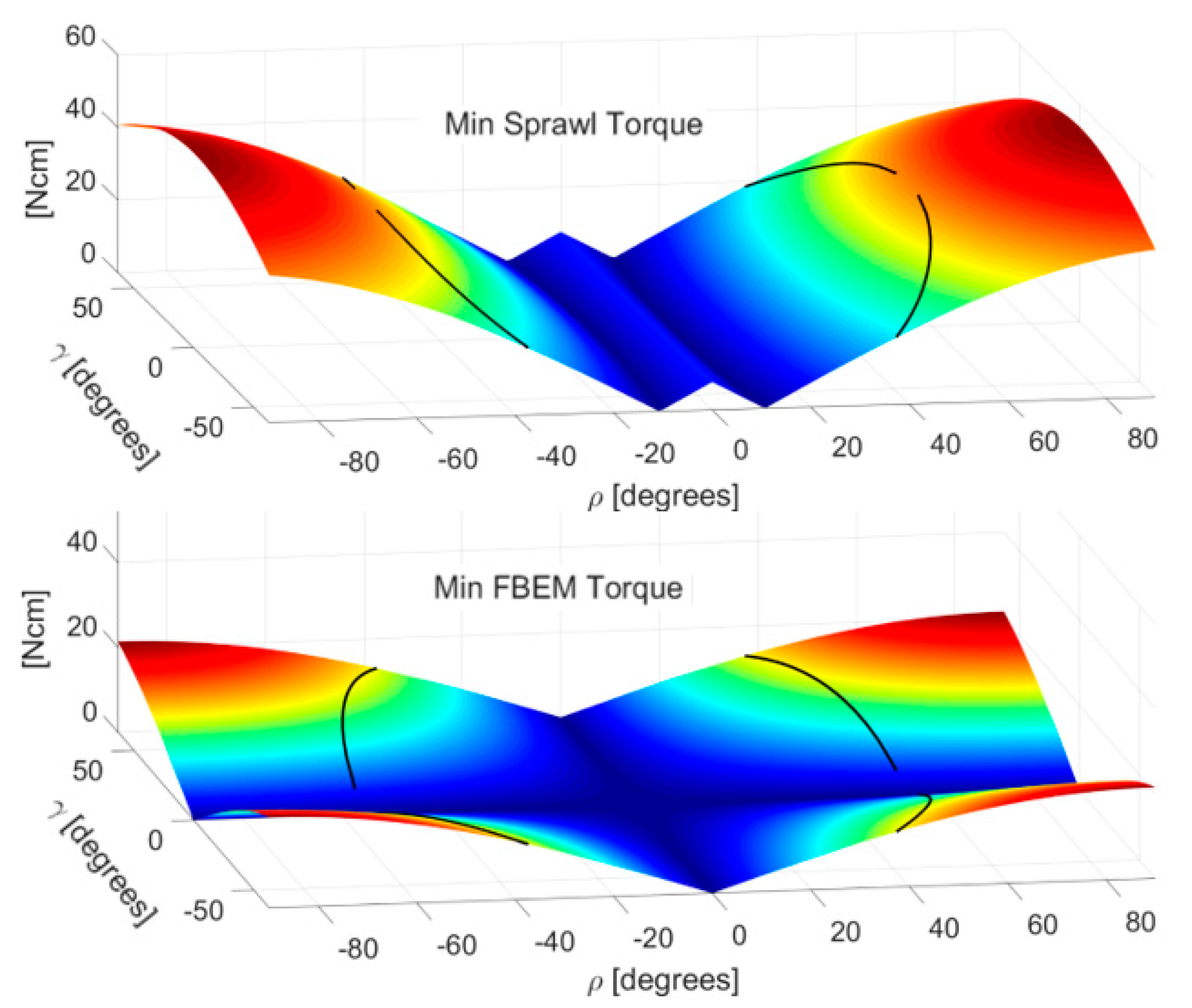
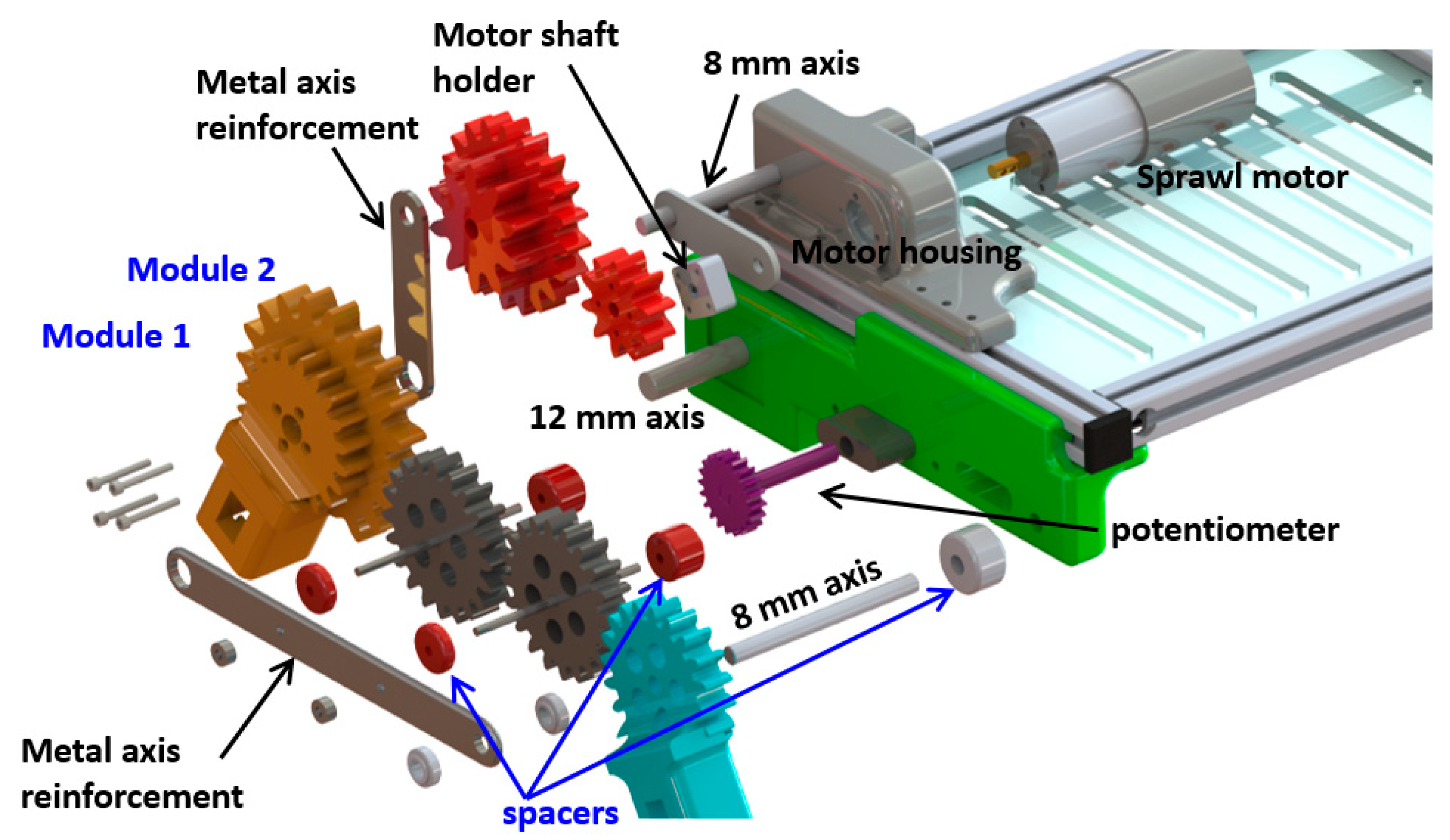
2.2.2. Sprawl
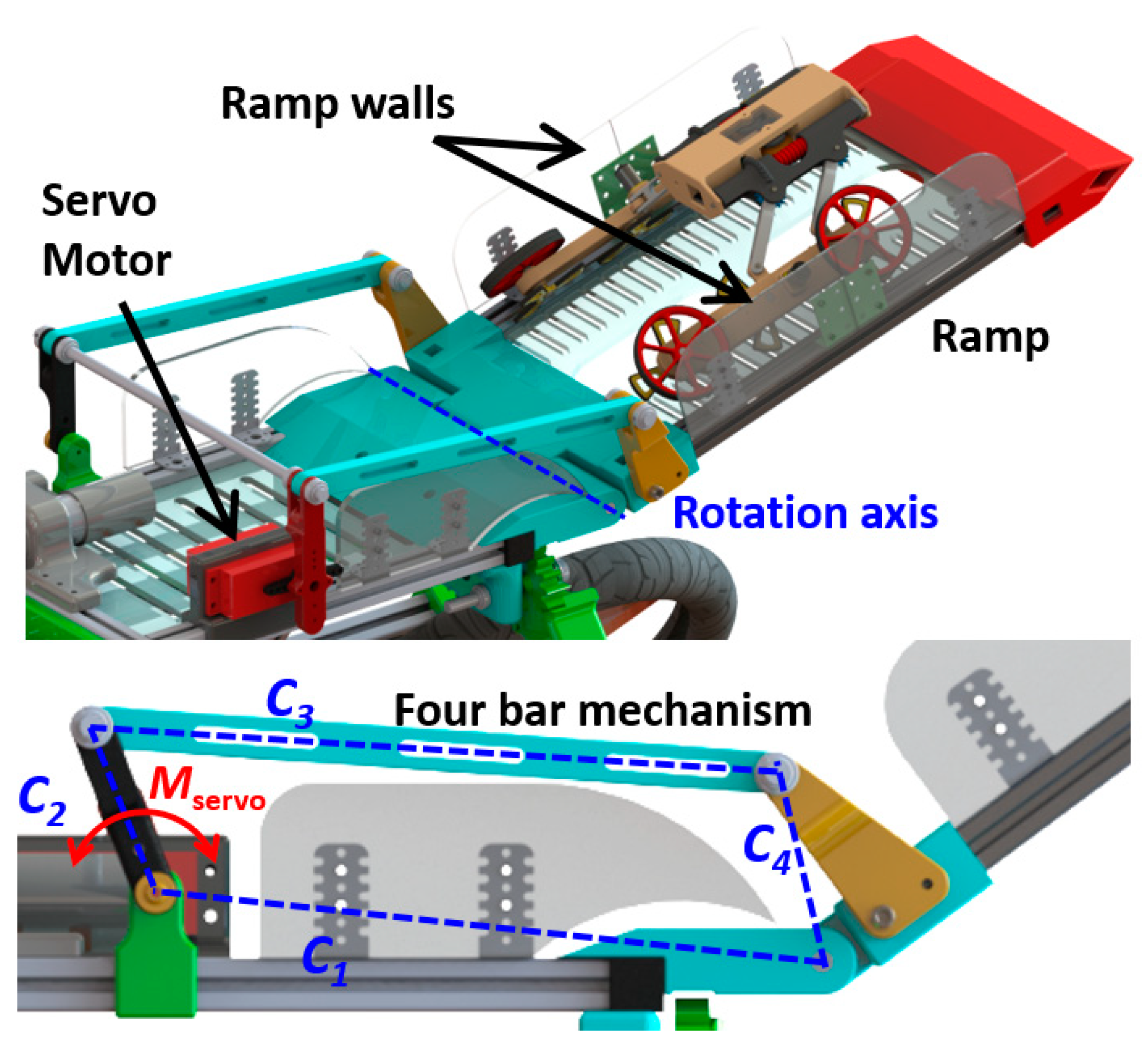
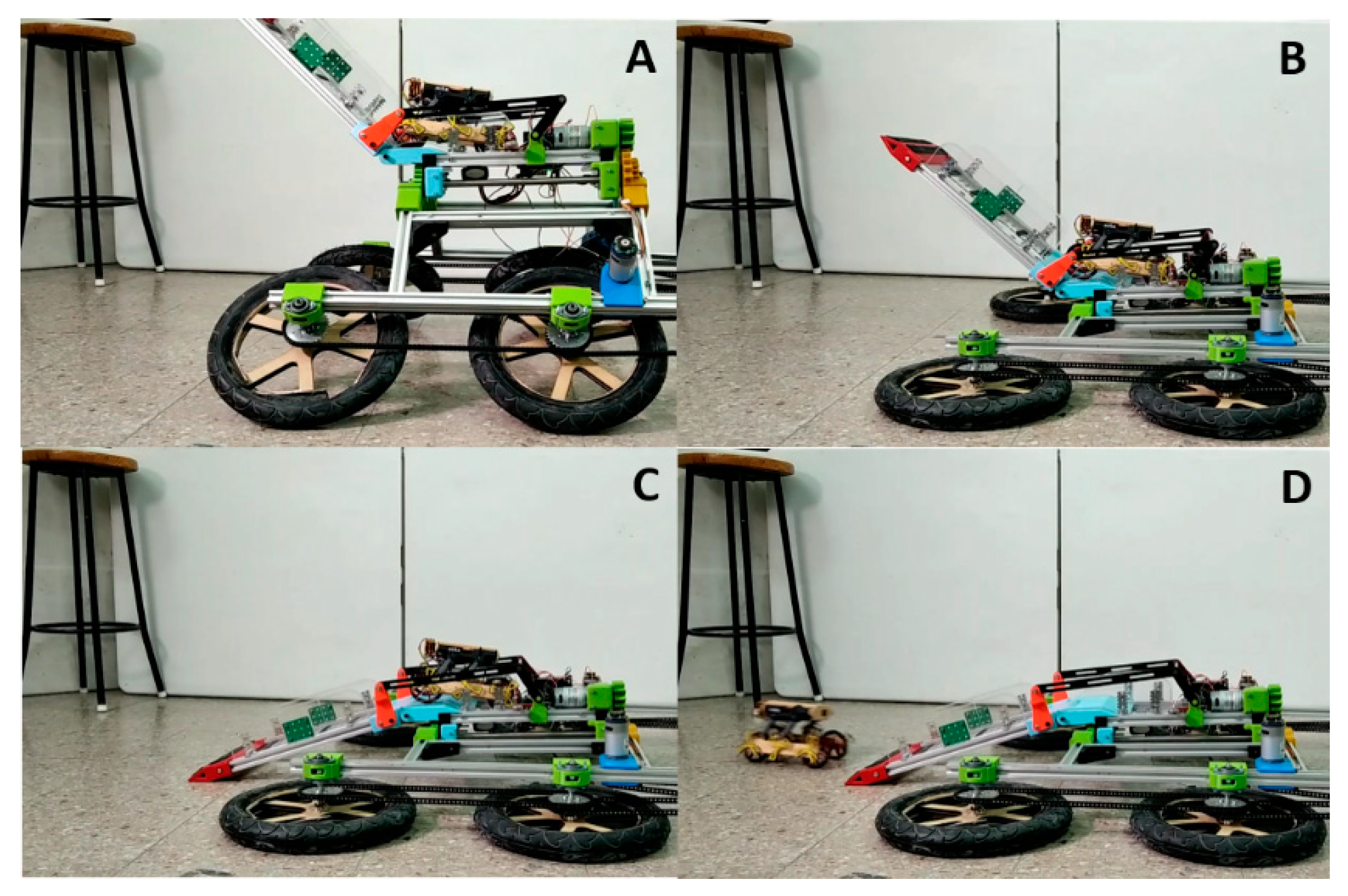
2.2.3. Tail (Ramp)
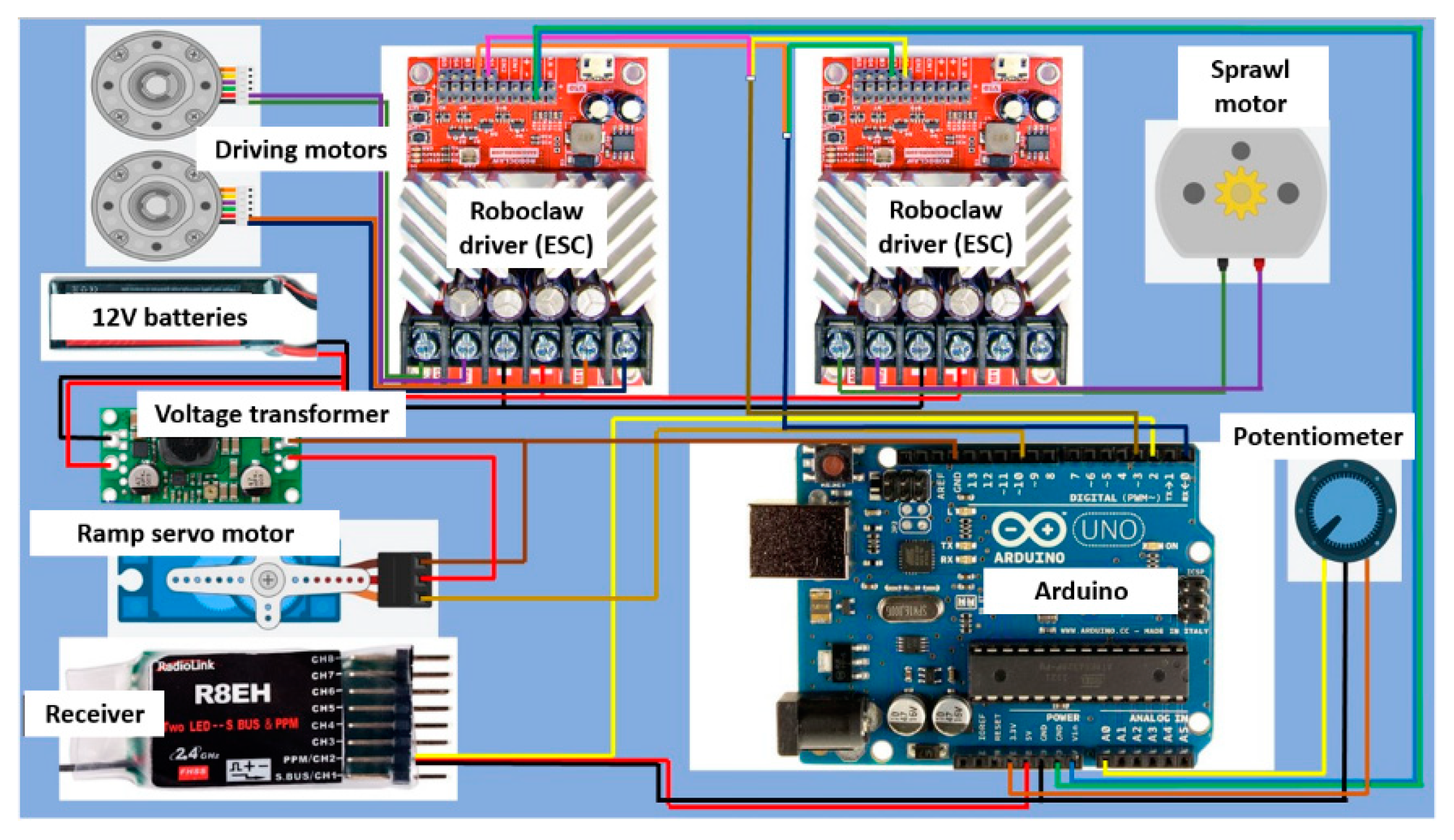
2.2.4. Microcontroller
2.3. Manufacturing
2.4. Design Considerations, Challenges and Scalability
3. Kinematic and Dynamic Analysis
3.1. Robot Kinematics
3.1.1. Rising STAR
3.1.2. Big STAR
3.1.3. The Tail
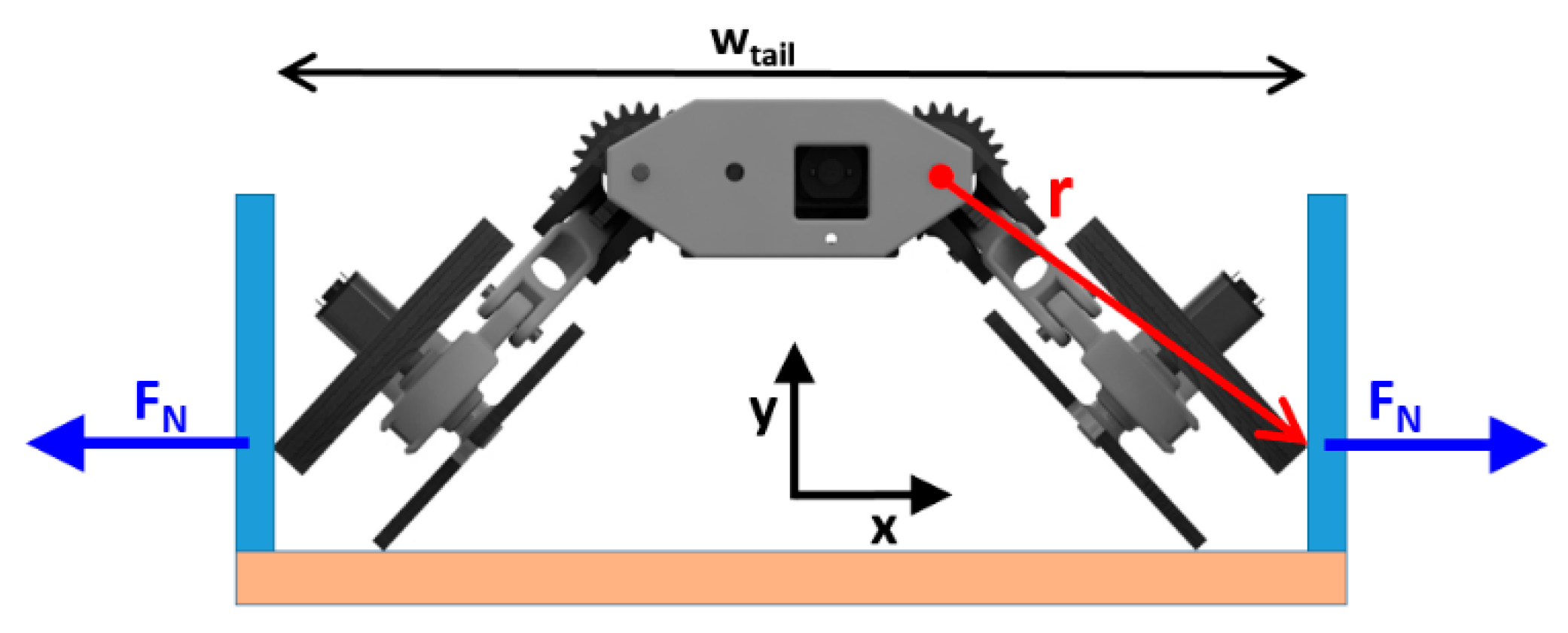
3.2. Force Analysis of RSTAR
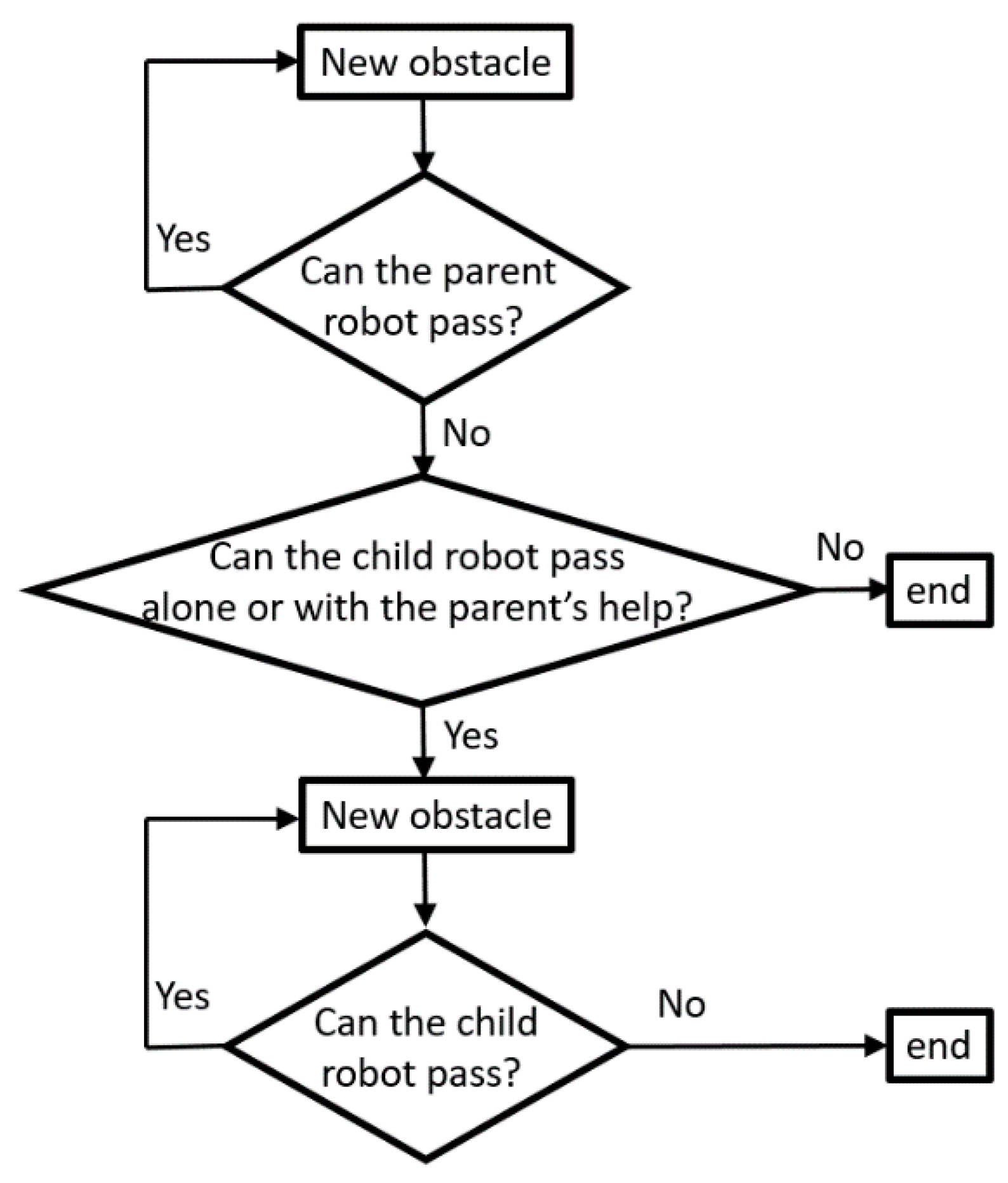
3.3. Navigability
3.4. Working Range
3.4.1. Maximum Working Range
3.4.2. BSTAR as a Charging Point for Scanning Operations
3.4.3. Reducing Exploration Time
4. Results
4.1. The BSTAR
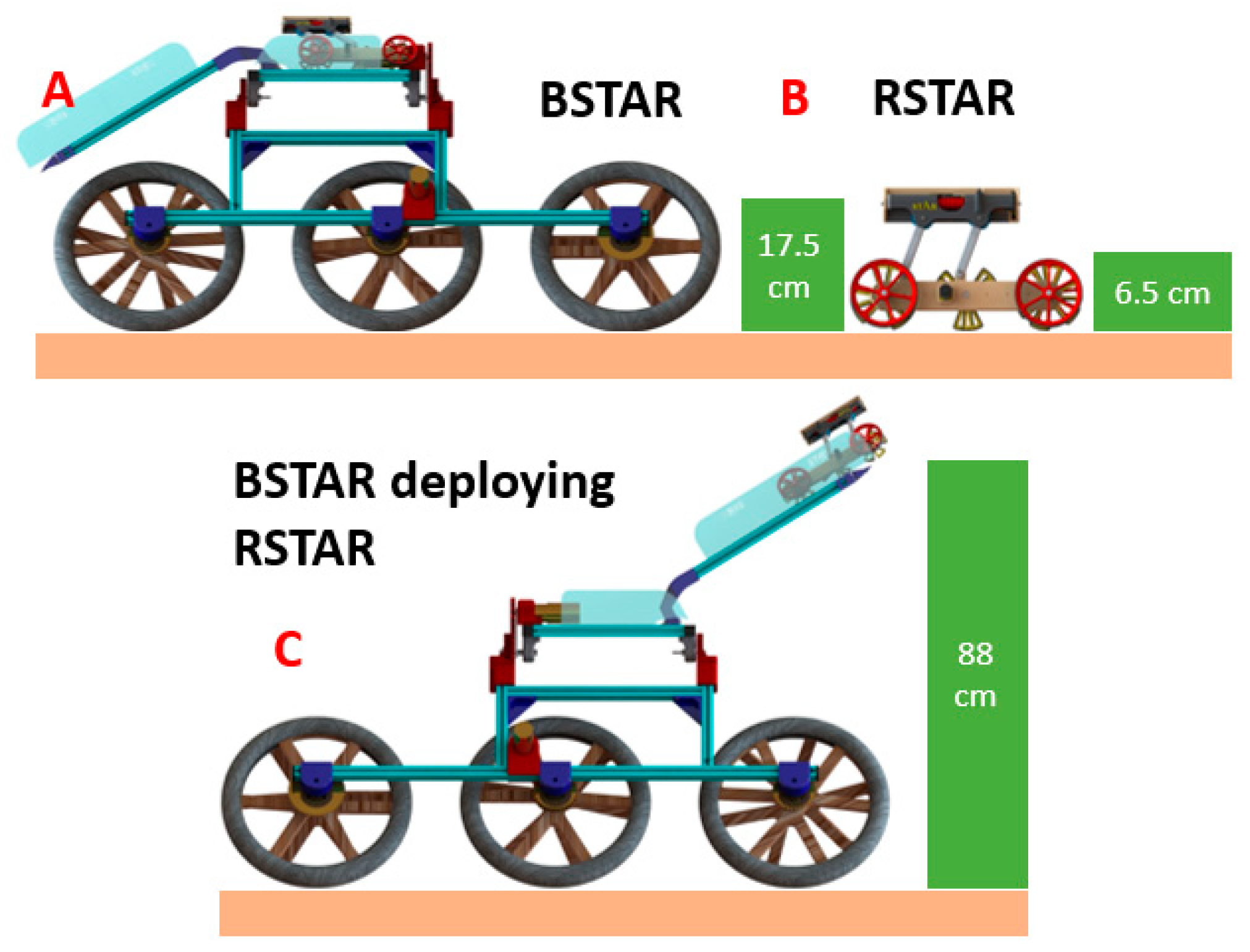
4.2. Deploying and Recovering RSTAR
4.2.1. Remote Control Operation
4.2.2. Automatic Features
4.3. Energy Requirements and Recharging
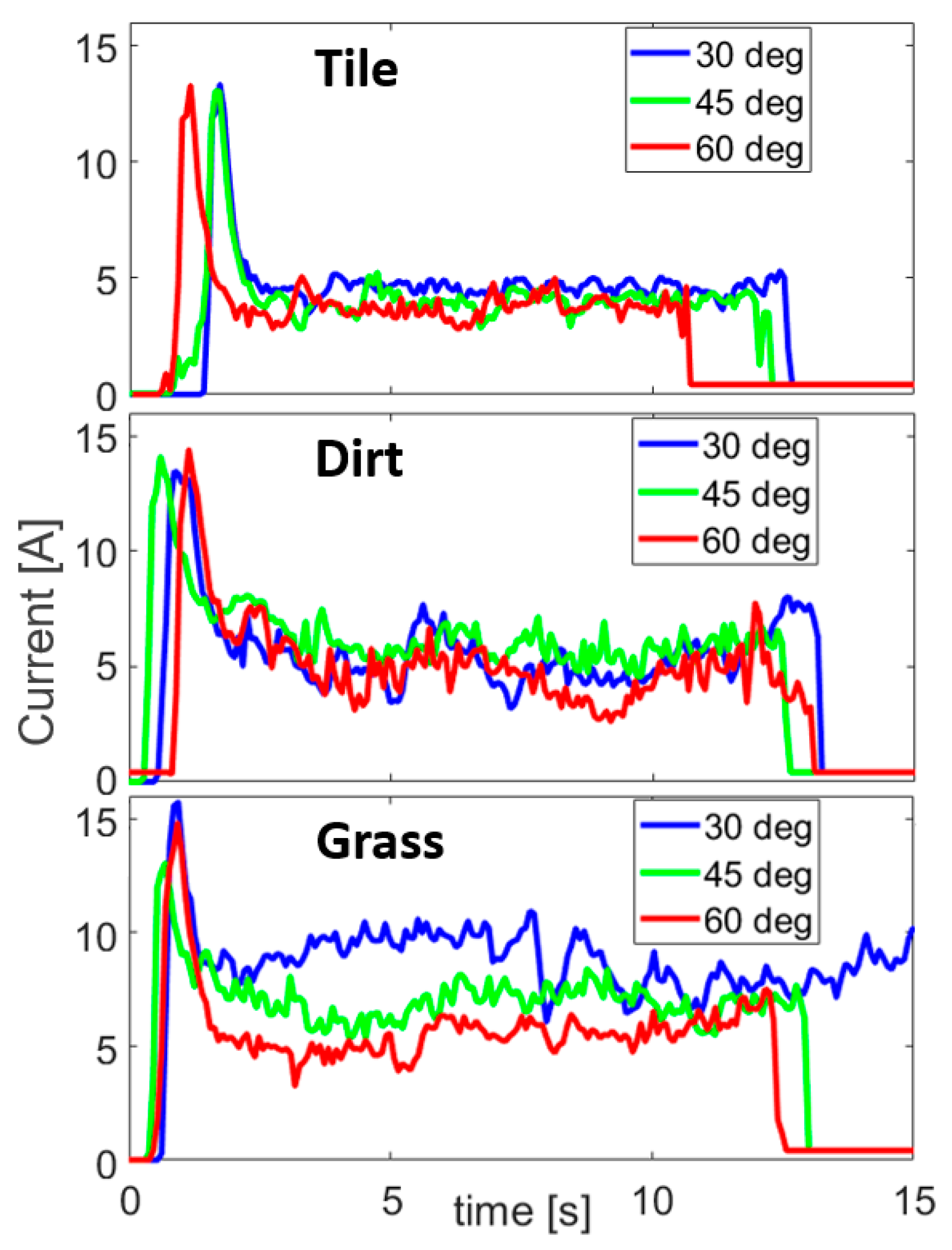
4.3.1. Energy Consumption
4.3.2. Recharging RSTAR
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A.1. Detailed View of the Sprawl Mechanism

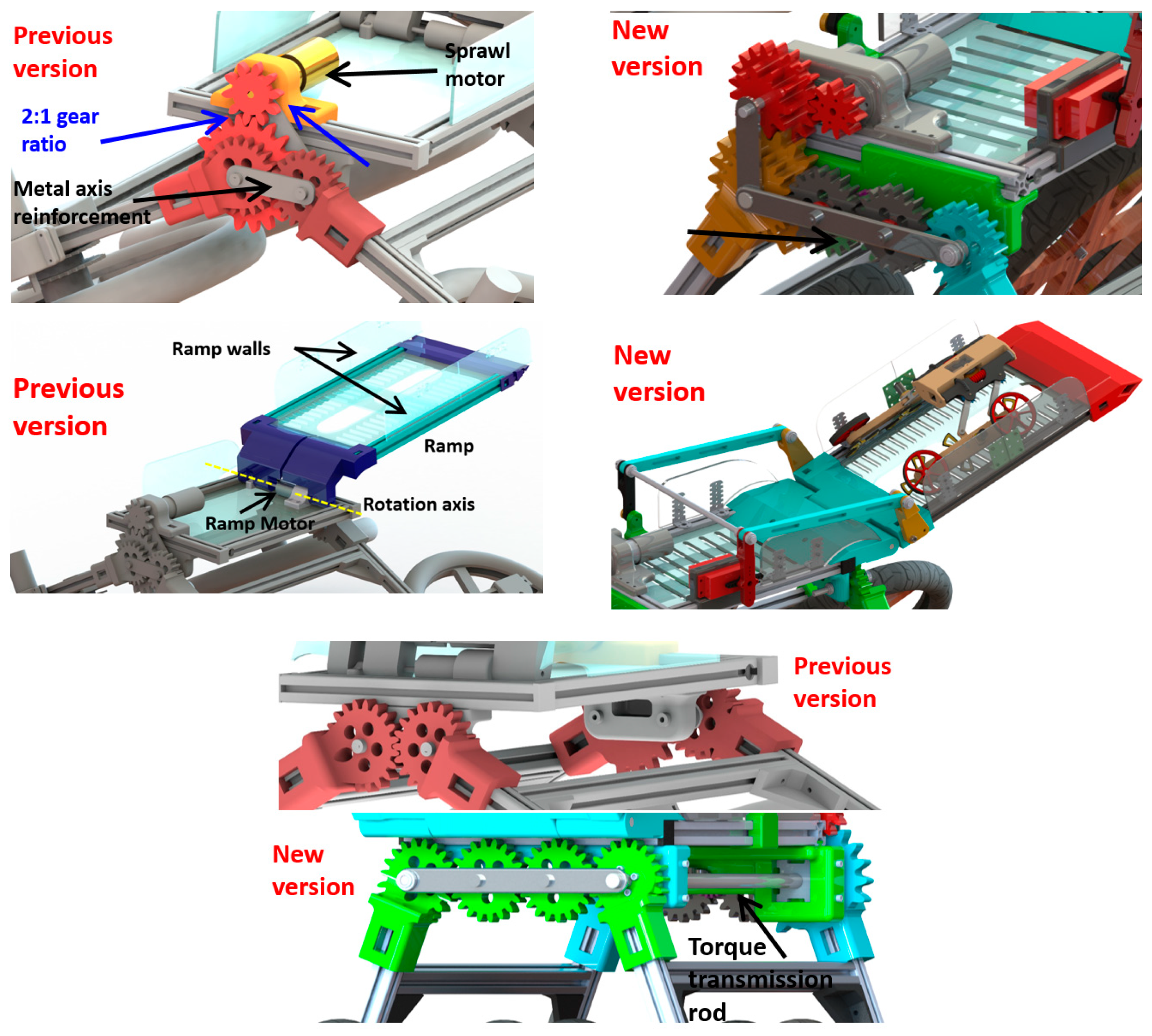
Appendix A.2. Design Improvements of the BSTAR Robot

Appendix A.3. Sprawl Mechanism Improvements
Appendix A.4. Torque Transmission
Appendix A.5. Ramp Design
References
- Morrey, J.; Larribrecht, B.; Horchler, A.; Ritzmann, R.; Quinn, R. Highly mobile and robust small quadruped robots. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Las Vegas, NV, USA, 27–31 October 2003; pp. 82–87. [Google Scholar]
- Hoover, A.M.; Burden, S.; Fu, X.Y.; Sastry, S.S.; Fearing, R.S. Bio-inspired design and dynamic maneuverability of a minimally actuated six-legged robot. In Proceedings of the 3rd IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Tokyo, Japan, 26–29 September 2010; pp. 869–873. [Google Scholar]
- Birkmeyer, P.; Peterson, K.; Fearing, R.S. DASH: A dynamic 16g hexapedal robot. In Proceedings of the The 2009 IEEE/RSJ International Conference on Intelligent RObots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 2683–2689. [Google Scholar]
- Kim, S.; Clark, J.E.; Cutkosky, M.R. iSprawl: Design and Tuning for High-speed Autonomous Open-loop Running. Int. J. Robot. Res. 2006, 25, 903–912. [Google Scholar] [CrossRef]
- Pullin, A.; Kohut, N.; Zarrouk, D.; Fearing, R.S. Dynamic turning of 13 cm robot comparing tail and differential drive. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), St. Paul, MN, USA, 14–19 May 2012; pp. 5083–5093. [Google Scholar]
- Galloway, K.C.; Haynes, G.C.; Ilhan, B.D.; Johnson, A.M.; Knopf, R.; Lynch, G.; Plotnick, B.; White, M.; Koditschek, D.E. X-RHex: A Highly Mobile Hexapedal Robot for Sensorimotor Tasks; Technical Report; University of Pennsylvania: Philadelphia, PA, USA, 2010. [Google Scholar]
- Cham, J.G.; Bailey, S.A.; Clark, J.E.; Full, R.J.; Cutkosky, M.R. Fast and Robust: Hexapedal Robots via Shape Deposition Manufacturing. Int. J. Robot. Res. 2002, 21, 869–882. [Google Scholar] [CrossRef]
- Kohut, N.; Pullin, A.; Haldane, D.W.; Zarrouk, D.; Fearing, R.S. Precise dynamic turning of a 10 cm legged robot on a low friction surface using a tail. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3299–3306. [Google Scholar]
- Zarrouk, D.; Pullin, A.; Kohut, N.; Fearing, R.S. STAR, a sprawl tuned autonomous robot. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 20–25. [Google Scholar]
- Karidis, P.K.; Zarrouk, D.; Poulakakis, I.; Fearing, R.S.; Tanner, H.G. Planning with the STAR(s). In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL USA, 14–18 September 2014; pp. 3033–3038. [Google Scholar]
- Zarrouk, D.; Fearing, R.S. Controlled In-Plane Locomotion of a Hexapod Using a Single Actuator. IEEE Trans. Robot. 2015, 31, 157–167. [Google Scholar] [CrossRef]
- Zarrouk, D.; Yehezkel, L. Rising STAR: A Highly Reconfigurable Sprawl Tuned Robot. IEEE Robot. Autom. Lett. 2018, 3, 1888–1895. [Google Scholar] [CrossRef]
- Karras, J.T.; Fuller, C.L.; Carpenter, K.C.; Buscicchio, A.; Mckeeby, D.; Norman, C.J.; Parcheta, C.E.; Davydychev, I.; Fearing, R.S. Pop-up mars rover with textile-enhanced rigid-flex PCB body. In Proceedings of the IEEE International Conference on Robotics and Automation, Marina Bay Sands, Singapore, 28 May–3 June 2017; pp. 5459–5466. [Google Scholar]
- Kim, Y.S.; Jung, G.P.; Kim, H.; Cho, K.J.; Chu, C.N. Wheel Transformer: A Wheel-Leg Hybrid Robot with Passive Transformable Wheels. IEEE Trans. Robot. 2014, 30, 1487–1498. [Google Scholar] [CrossRef]
- Spenko, M.J.; Haynes, G.C.; Saunders, J.A.; Cutkosky, M.R.; Rizzi, A.A.; Full, R.J.; Koditschek, D.E. Biologically inspired climbing with a hexapedal robot. J. Field Robot. 2008, 25, 223–242. [Google Scholar] [CrossRef]
- Tan, N.; Mohan, R.E.; Elangovan, K. Scorpio: A Biomimetic Reconfigurable Rolling-Crawling Robot. Int. J. Adv. Robot. Syst. 2016, 13, 1729881416658180. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, D.; Yao, Y.A.; Kong, X.; Li, Y. A reconfigurable multi-mode mobile parallel robot. Mech. Mach. Theory 2017, 11, 39–65. [Google Scholar] [CrossRef]
- Ding, W.; Detert, T.; Corves, B.; Yao, Y.A. Reconbot: A Reconfigurable Rescue Robot Composed of Serial-Parallel Hybrid Upper Humanoid Body and Track Mobile Platform. In New Advances in Mechanisms, Mechanical Transmissions and Robotics Mechanisms and Machine Science; Springer: Cham, Switzerland, 2016; pp. 241–249. [Google Scholar]
- Chen, S.C.; Huang, K.J.; Chen, W.H.; Shen, S.Y.; Li, C.H.; Lin, P.C. Quattroped: A Leg--Wheel Transformable Robot. IEEE/ASME Trans. Mechatron. 2014, 19, 730–742. [Google Scholar] [CrossRef]
- Sun, Y.; Ma, S. Decoupled kinematic control of terrestrial locomotion for an ePaddle-based reconfigurable amphibious robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1223–1228. [Google Scholar]
- Khan, M.T.; Qadir, M.U.; Nasir, F.; Silva, C.W.D. A framework for a fault tolerant multi-robot system. In Proceedings of the 10th International Conference on Computer Science & Education, Cambridge, UK, 22–24 June 2015; pp. 197–201. [Google Scholar]
- Fong, T.; Grange, S.; Thorpe, C.; Baur, C. Multi-robot remote driving with collaborative control. In Proceedings of the 10th IEEE International Workshop on Robot and Human Interactive Communication, Bordeaux, Paris, France, 18–21 September 2001; pp. 669–704. [Google Scholar]
- Wagner, G.; Choset, H. Subdimensional expansion for multirobot path planning. Artif. Intell. 2015, 219, 1–24. [Google Scholar] [CrossRef]
- Shnaps, I.; Rimon, E. Online Coverage by a Tethered Autonomous Mobile Robot in Planar Unknown Environments. IEEE Trans. Robot. 2014, 30, 966–974. [Google Scholar] [CrossRef]
- Min, B.C.; Matson, E.T.; Jung, J.W. Active Antenna Tracking System with Directional Antennas for Enhancing Wireless Communication Capabilities of a Networked Robotic System. J. Field Robot. 2015, 33, 391–406. [Google Scholar] [CrossRef]
- Vargas, A.M.; Mizuuchi, K.; Endo, D.; Rohmer, E.; Nagatani, K.; Yoshida, K. Development of a Networked Robotic System for Disaster Mitigation, Navigation System based on 3D Geometry Acquisition. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 4821–4826. [Google Scholar]
- Yang, Y.; Xu, G.; Wu, X.; Feng, H.; Xu, Y. Parent-child robot system for rescue missions. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Guilin, China, 18–22 December 2009; pp. 1427–1432. [Google Scholar]
- Huang, B.; Li, M.; Sun, L. The Research of a parent-children type robot system. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Kunming, China, 17–20 December 2006; pp. 977–981. [Google Scholar]
- Schmitt, J.; Holmes, P. Mechanical models for insect locomotion: Dynamics and stability in the horizontal plane I. Theory. Biol. Cyber. 2000, 83, 501–515. [Google Scholar] [CrossRef] [PubMed]
- Schmitt, J.; Holmes, P. Mechanical models for insect locomotion: Dynamics and stability in the horizontal plane II. Appl. Biol. Cyber. 2000, 83, 517–527. [Google Scholar] [CrossRef] [PubMed]
- Meiri, N.; Zarrouk, D. Flying STAR, a Hybrid Crawling and Flying Sprawl Tuned Robot. In Proceedings of the International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 December 2019; pp. 5302–5308. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot Characteristics | RSTAR | BSTAR |
|---|---|---|
| Characteristic length | LR = 14.5 cm | LB = 82.5 cm |
| Wheel/whegs radius | rR = 2.8 cm | rB = 15.5 cm |
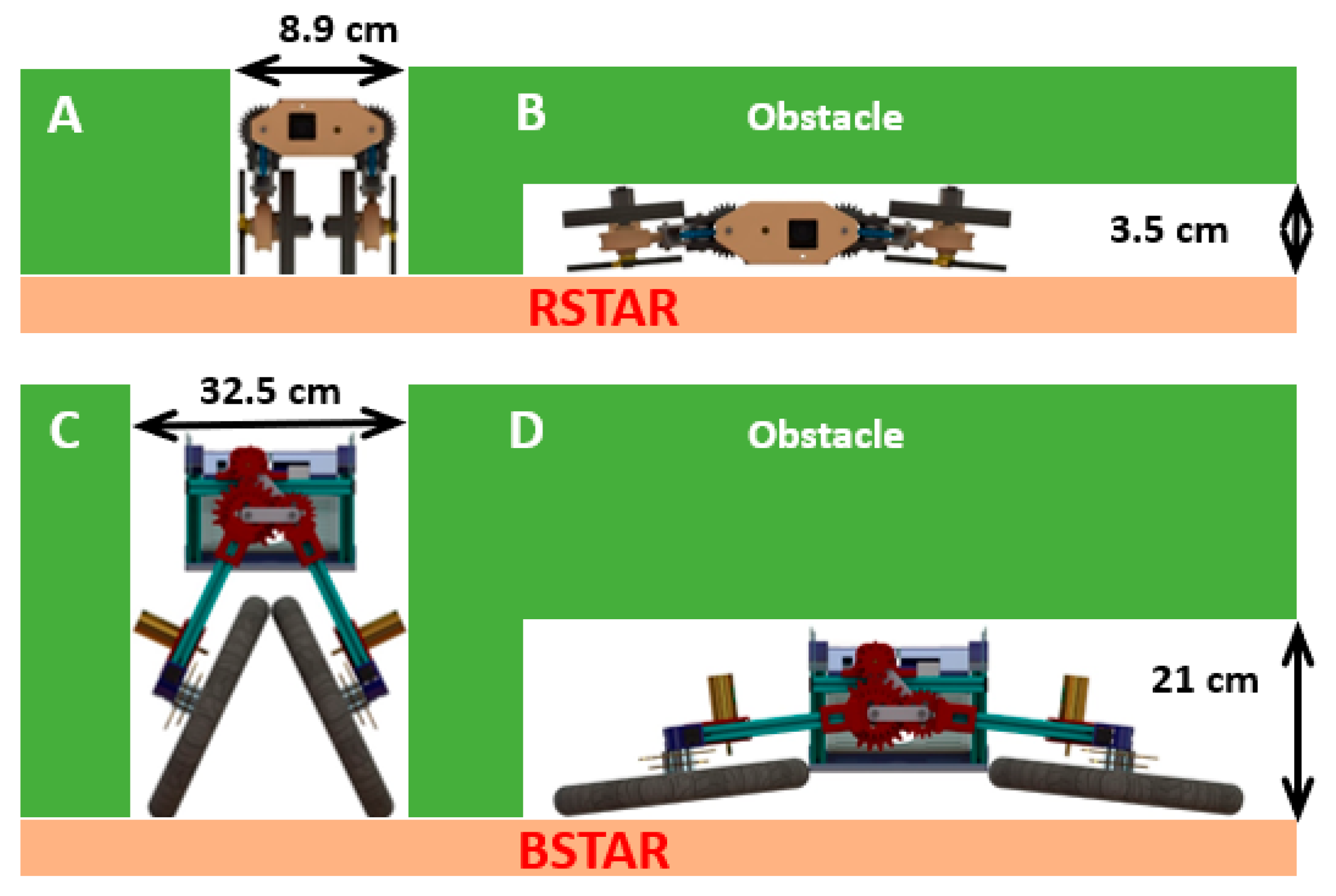
| Minimum width | Min(wR) = 8.9 cm | Min(wB) = 32.5 cm |
| Maximum width | Max(wR) = 28.5 cm | Max(wB) = 90.2 cm |
| Minimum height | Min(hR) = 3.5 cm | Min(hB) = 21 cm |
| Maximum height | Max(hR) = 12.8 cm | Max(hB) = 50.3 cm |
| Robot mass | mR = 0.38 kg | mB = 9.8 kg |
| Battery (Lipo) | 800 mAh | 2 × 5200 mAh |
| Mass | 0.032 kg | 0.72 kg |
| Voltage | 7.4 V | 11.1 V |
| Energy | 21.3 kJ | 415.6 kJ |
| Working range | dR = 5.12 km | dB = 11.7 km |
| Maximum speed | VR = 0.8 m/s | VB = 1.4 m/s |
| COT (specific resistance) | 1.12 | 0.37 |
| Safe Payload | 0.2 kg | 5 kg |
| Surface | Sprawl | Speed [m/s] | Current [A] | Power [W] | COT |
|---|---|---|---|---|---|
| Tile | 30 | 1.13 | 4.57 | 33.8 | 0.299 |
| Tile | 45 | 1.17 | 4.31 | 31.9 | 0.272 |
| Tile | 60 | 1.25 | 3.86 | 27.8 | 0.221 |
| Dirt | 30 | 1.05 | 5.16 | 38.2 | 0.333 |
| Dirt | 45 | 1.05 | 6.30 | 46.6 | 0.443 |
| Dirt | 60 | 1.05 | 5.23 | 38.6 | 0.367 |
| Grass | 30 | 0.8 | 9.66 | 71.5 | 0.892 |
| Grass | 45 | 1.03 | 6.69 | 49.5 | 0.477 |
| Grass | 60 | 1.11 | 5.07 | 37.5 | 0.337 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yacoby, D.; Yehezkel, L.; Inbar, O.; Zarrouk, D. Design and Modeling of a Parent Big STAR Robot Platform That Carries a Child RSTAR. Appl. Sci. 2020, 10, 8767. https://doi.org/10.3390/app10248767
Yacoby D, Yehezkel L, Inbar O, Zarrouk D. Design and Modeling of a Parent Big STAR Robot Platform That Carries a Child RSTAR. Applied Sciences. 2020; 10(24):8767. https://doi.org/10.3390/app10248767
Chicago/Turabian StyleYacoby, Daniel, Liran Yehezkel, Ori Inbar, and David Zarrouk. 2020. "Design and Modeling of a Parent Big STAR Robot Platform That Carries a Child RSTAR" Applied Sciences 10, no. 24: 8767. https://doi.org/10.3390/app10248767
APA StyleYacoby, D., Yehezkel, L., Inbar, O., & Zarrouk, D. (2020). Design and Modeling of a Parent Big STAR Robot Platform That Carries a Child RSTAR. Applied Sciences, 10(24), 8767. https://doi.org/10.3390/app10248767