Simplified Design of Magnetic Gear by Considering the Maximum Transmission Torque Line

 , ,
, ,  and
and
Abstract
1. Introduction
2. Maximum Transmission Torque Line of Magnetic Gear
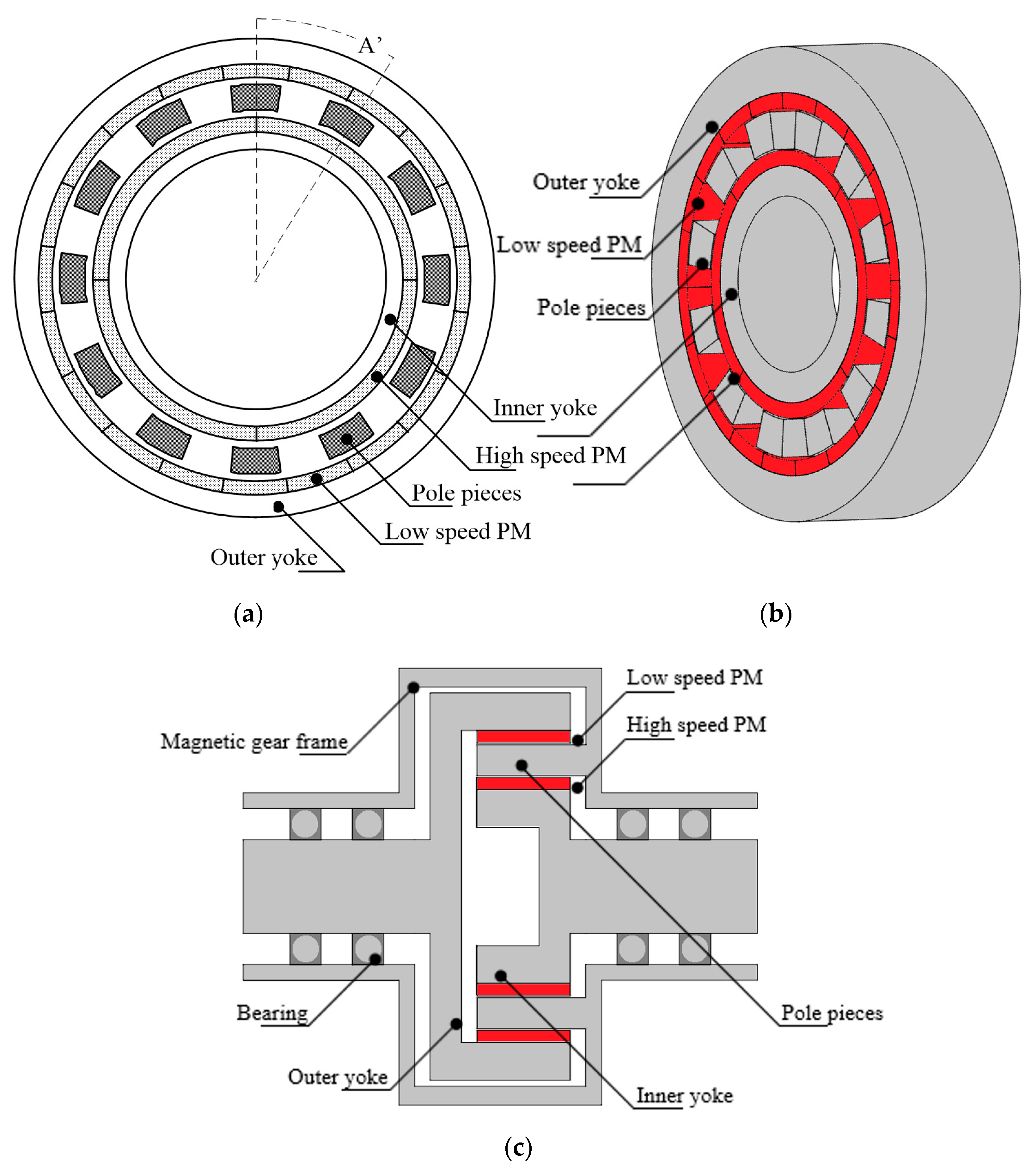
2.1. Magnetic Gear Type and Configuration
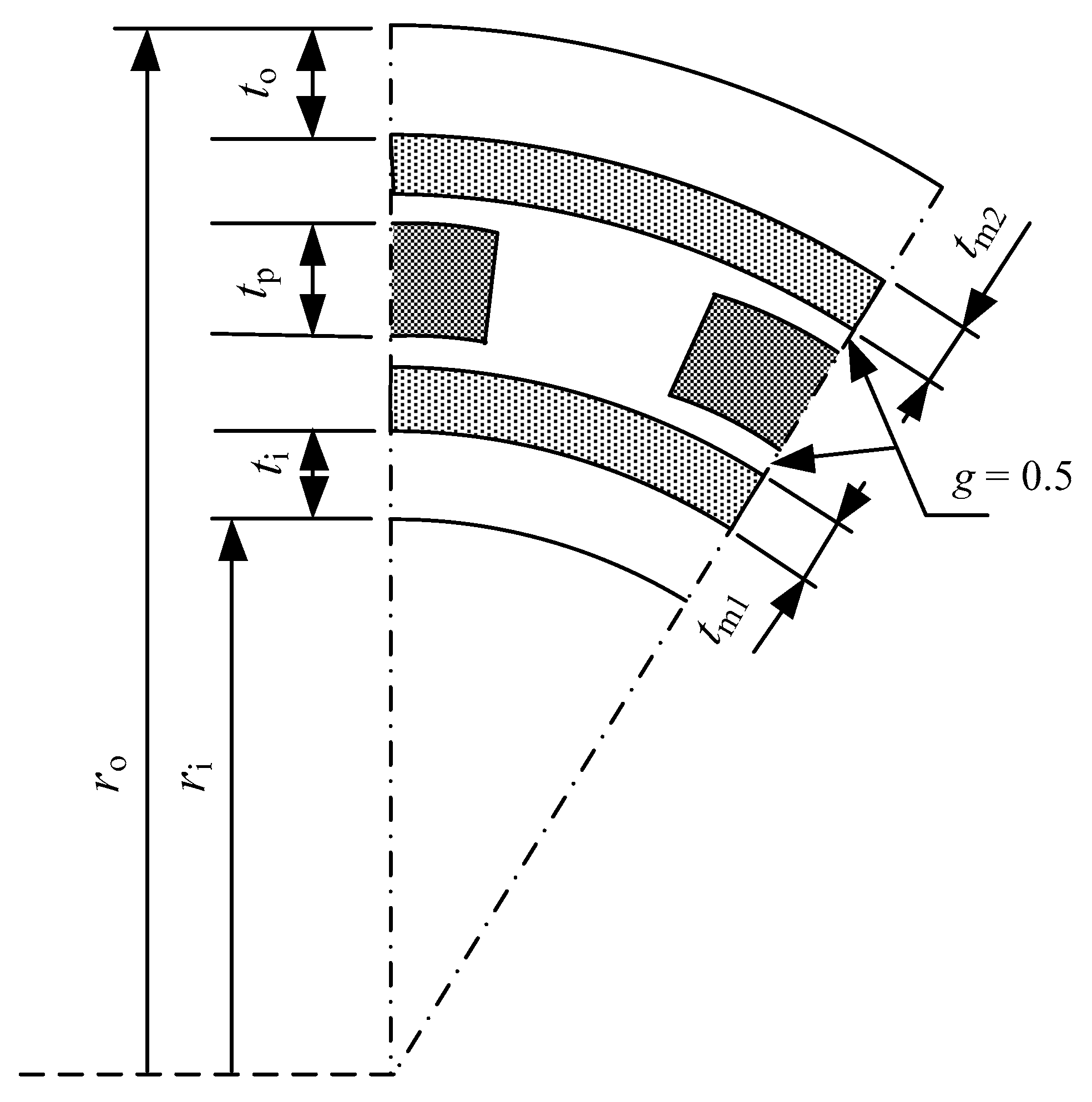
2.2. Design Parameters of Magnetic Gear
3. Maximum Transmission Torque Line and Design Parameters of Magnetic Gear
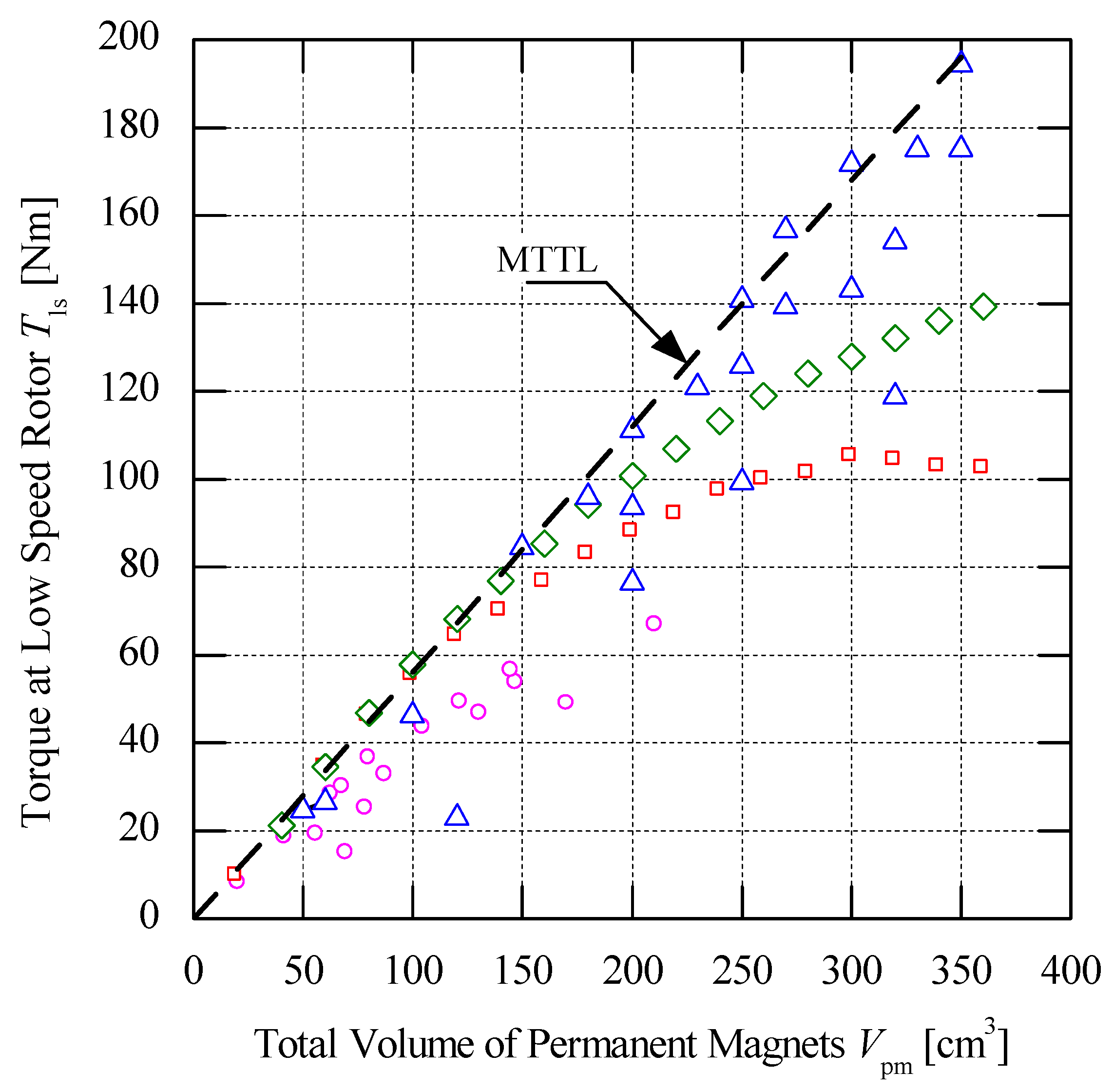
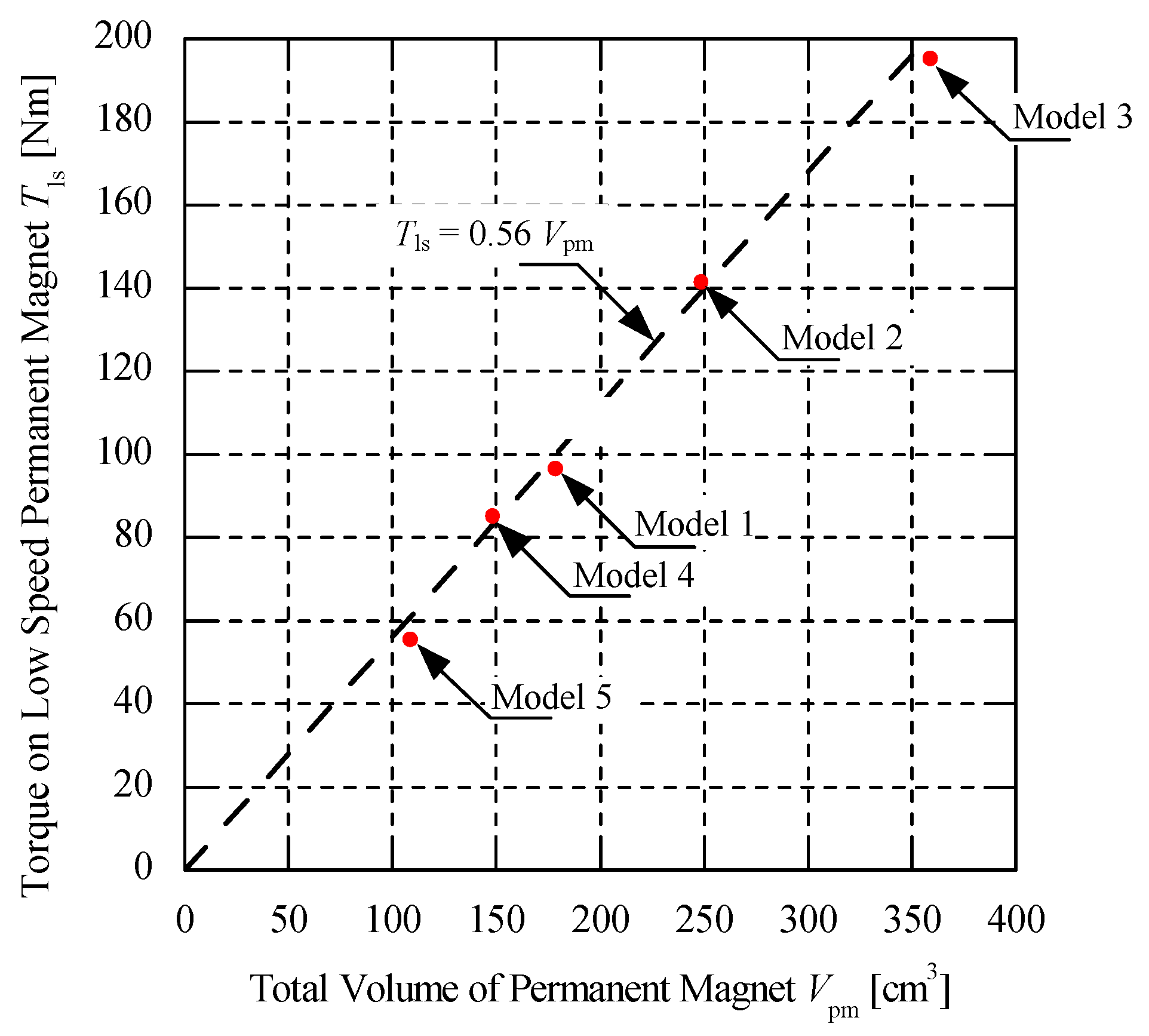
3.1. Maximum Transmission Torque Line
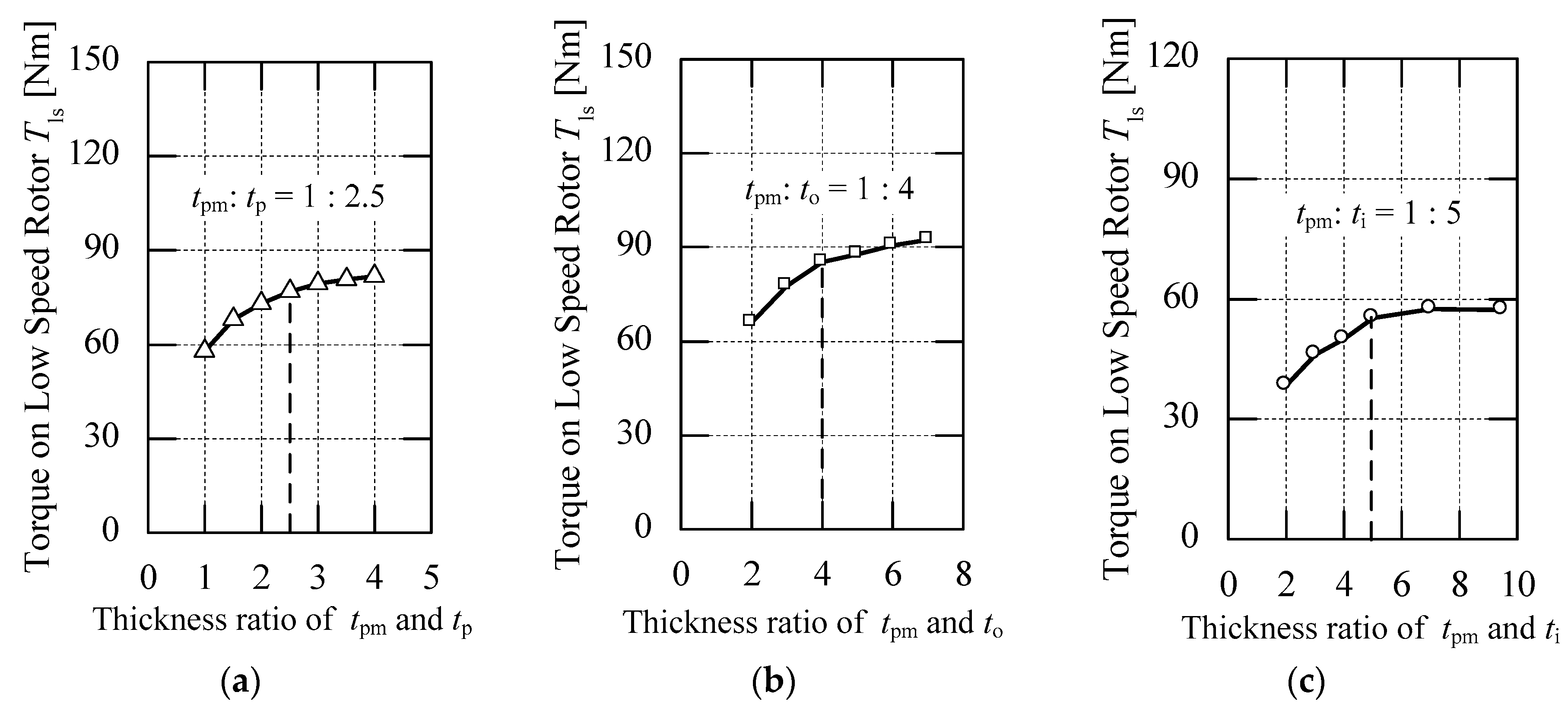
3.2. Relationship between the Parameter of Permanent Magnets and Irons
3.3. Relationship of Design Parameters
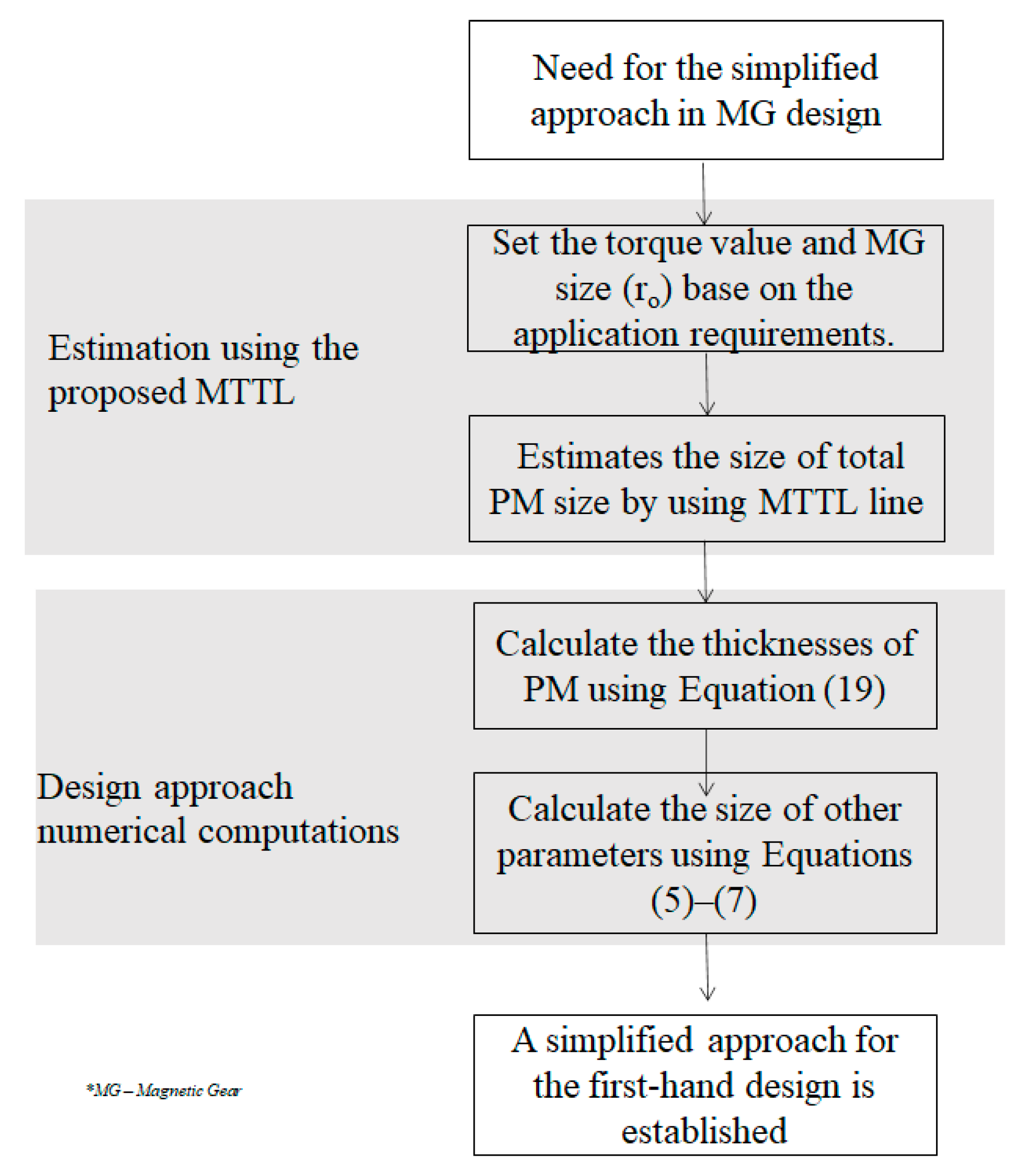
3.4. Design Process Based on MTTL
4. Validation of Simplified Design of Magnetic Gear
4.1. Design Condition
4.2. Validation of Design Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| FEM | Finite element method |
| DC | Direct current |
| ℓ | Axial length of magnetic gear |
| g | Air gap length |
| Gr | Gear ratio |
| MG | Magnetic gear |
| MTTL | Maximum Transmission Torque Line |
| nhs | Speed of high-speed rotor |
| Nhs | Number of permanent magnets at high-speed rotor |
| nls | Speed of low-speed rotor |
| Nls | Number of permanent magnets at low-speed rotor |
| Npp | Number of pole pieces |
| PM | Permanent magnet |
| phs | Number of pole pairs at high-speed rotor |
| pls | Number of pole pairs at low-speed rotor |
| ri | Inner radius of magnetic gear |
| ro | Outer radius of magnetic gear |
| ti | Thickness of inner yoke |
| tm1 | Thickness of permanent magnet at high-speed rotor |
| tm2 | Thickness of permanent magnet at low-speed rotor |
| Tls | Average torque at low-speed rotor (transmission torque) |
| to | Thickness of outer yoke |
| tp | Thickness of pole pieces |
| tpm | Thickness of permanent magnet |
| Vm1 | Volume of permanent magnet at low-speed rotor |
| Vm2 | Volume of permanent magnet at high-speed rotor |
| Vpm | Total volume of permanent magnet |
References
- Rasmussen, P.O.; Andersen, T.O.; Jorgensen, F.T.; Nielsen, O. Development of a high-performance magnetic gear. IEEE Trans. Ind. Appl. 2005, 41, 764–770. [Google Scholar] [CrossRef]
- Kowol, M.; Kołodziej, J.; Gabor, R.; Łukaniszyn, M.; Jagieła, M. On-load characteristics of local and global forces in Co-Axial magnetic gear with reference to additively manufactured parts of modulator. Energies 2020, 13, 3169. [Google Scholar] [CrossRef]
- Zhan, Y.; Ma, L.; Wang, K.; Zhao, H.; Xu, G.; Ding, N. Torque analysis of concentric magnetic gear with interconnected flux modulators. IEEE Trans. Magn. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Jian, L.; Deng, Z.; Shi, Y.; Wei, J.; Chan, C.C. The mechanism how coaxial magnetic gear transmits magnetic torques between its two rotors: Detailed analysis of torque distribution on modulating ring. IEEE/ASME Trans. Mechatron. 2019, 24, 763–773. [Google Scholar] [CrossRef]
- Peng, S.; Fu, W.N.; Ho, S.L. A novel high torque density triple permanent magnet excited magnetic gear. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Chen, Y.; Fu, W.N.; Li, W. Performance analysis of a novel triple-permanent-magnet-excited magnetic gear and its design method. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Acharya, V.M.; Bird, J.Z.; Calvin, M. A flux focusing axial magnetic gear. IEEE Trans. Magn. 2013, 49, 4092–4095. [Google Scholar] [CrossRef]
- Chen, Y.; Fu, W.N.; Ho, S.L.; Liu, H. A quantitative comparison analysis of radial-flux, transverse-flux, and axial-flux magnetic gears. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Ruiz-Ponce, G.E.; Arjona, M.A.; Hernández, C.; Espinoza, C. Modeling of an axial-type magnetic gear using a reluctance-based magnetic equivalent circuit. In Proceedings of the IEEE Conference on Electromagnetic Field Computation (CEFC), Miami, FL, USA, 13–16 November 2016. [Google Scholar]
- Bomela, W.; Bird, J.Z.; Acharya, V.M. The performance of a transverse flux magnetic gear. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Li, X.; Liu, S.; Wang, Y.; Fan, Y. Investigation of the flux leakage effects in transverse-flux magnetic gear. In Proceedings of the 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017. [Google Scholar]
- Zhu, D.; Yang, F.; Du, Y.; Xiao, F.; Ling, Z. An axial-field flux-modulated magnetic gear. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Mustafa, S.S.; Misron, N.; Othman, M.L.; Tsuyoshi, H. Power characteristics analysis of a novel double-stator magnetic geared permanent magnet generator. Energies 2017, 10, 2048. [Google Scholar] [CrossRef]
- Mustafa, S.S.; Misron, N.; Mariun, N.; Othman, M.L.; Hanamoto, T. Torque distribution characteristics of a novel double-stator permanent magnet generator integrated with a magnetic gear. Energies 2017, 10, 2. [Google Scholar] [CrossRef]
- Mustafa, S.S.; Misron, N.; Mariun, N.; Othman, M.L.; Hanamoto, T. A novel double-stator permanent magnet generator integrated with a magnetic gear. Prog. Electromagn. Res. 2016, 49, 69–80. [Google Scholar]
- Salihu, S.M.; Misron, N.; Othman, M.L.; Hanamoto, T. Power density evaluation of a novel double-stator magnetic geared permanent magnet generator. Prog. Electromagn. Res. 2018, 80, 19–36. [Google Scholar] [CrossRef][Green Version]
- Rasmussen, P.O.; Mortensen, H.H.; Matzen, T.N.; Jahns, T.M.; Toliyat, H.A. Motor integrated permanent magnet gear with a wide torque-speed range. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), San Jose, CA, USA, 20–24 September 2009; pp. 1510–1518. [Google Scholar]
- Guo, L.; Parsa, L. Effects of magnet shape on torque characteristics of Interior Permanent Magnet machines. In Proceedings of the IEEE Electric Ship Technologies Symposium, Baltimore, MD, USA, 20–21 April 2009; pp. 93–97. [Google Scholar]
- Mezani, S.; Atallah, K.; Howe, D. A high-performance axial-field magnetic gear. J. Appl. Phys. 2016, 99, 08R303. [Google Scholar] [CrossRef]
- Diez-Jimenez, E.; Sanchez-Montero, R.; Martinez-Muñoz, M. Towards miniaturization of magnetic gears: Torque performance assessment. Micromachines 2018, 9, 16. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.C.; Jian, B.S. Magnetic field analysis of a coaxial magnetic gear mechanism by two-dimensional equivalent magnetic circuit network method and finite-element method. Appl. Math. Model. 2015, 39, 5746–5758. [Google Scholar] [CrossRef]
- Atallah, K.; Howe, D. A novel high-performance magnetic gear. IEEE Trans. Magn. 2001, 37, 2844–2846. [Google Scholar] [CrossRef]
- Floris, A.; Serpi, A.; Porru, M.; Fois, G.; Damiano, A. Design of a double-stage magnetic gear for high-speed electric propulsion systems. In Proceedings of the 2018 23rd International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Etemadi, M.; Haghighian, R. Design optimization of wound rotor induction motor using genetic algorithm. In Proceedings of the 2019 5th Conference on Knowledge Based Engineering and Innovation (KBEI), Tehran, Iran, 28–29 February 2019; pp. 827–832. [Google Scholar]
- Nistor, C.G.; Cloţea, L.R. Separation of total noise (on components) for an optimal design of IE3 premium efficiency motor. In Proceedings of the 2017 International Conference on Optimization of Electrical and Electronic Equipment (OPTIM) & 2017 International Aegean Conference on Electrical Machines and Power Electronics (ACEMP), Brasov, Romania, 25–27 May 2017; pp. 501–508. [Google Scholar]
- Oancea, C.D.; Petre, V.C.; Boicea, V. Testing equipment for DC Motor. In Proceedings of the 2018 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 18–19 October 2018; pp. 17–20. [Google Scholar]
- Ai, C.; Lee, C.H.; Kirtley, J.L.; Huang, Y.; Wang, H.; Zhang, Z. A hybrid methodology for analyzing the performance of induction motors with efficiency improvement by specific commercial measures. Energies 2019, 12, 4497. [Google Scholar] [CrossRef]
- Vaithilingam, C.A.; Misron, N.; Zare, M.R.; Aris, I.; Marhaban, M.H. Computation of electromagnetic torque in a double rotor switched reluctance motor using flux tube methods. Energies 2012, 5, 4008–4026. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameter | Value |
|---|---|
| Gear ratio, Gr | 5:1 |
| Speed of high-speed rotor, nhs | 1000 rpm |
| Speed of low-speed rotor, nls | 200 rpm |
| Number of pole-pairs at HS rotor, phs | 2 |
| Number of pole-pairs at LS rotor, pls | 10 |
| Number of pole pieces. Npp | 12 |
| Length of air gap, g | 0.5 mm |
| Model | Design Requirement | Estimated Parameter | ||||||
|---|---|---|---|---|---|---|---|---|
| Transmission Torque, Tls (Nm) | Outer Radius, Ro (mm) | Vpm (cm3) | ℓ (mm) | tpm (mm) | tp (mm) | to (mm) | ti (mm) | |
| 1 | 100 | 80 | 179 | 70 | 3.3 | 8.3 | 13.2 | 16.5 |
| 2 | 140 | 120 | 250 | 50 | 4.5 | 11.3 | 18.0 | 22.5 |
| 3 | 200 | 195 | 357 | 30 | 6.0 | 15.0 | 24.0 | 30.0 |
| 4 | 85 | 120 | 152 | 30 | 4.5 | 11.3 | 18.0 | 22.5 |
| 5 | 60 | 60 | 107 | 70 | 3.0 | 7.5 | 12.0 | 15.0 |
| Structure of MG (Units: mm) |  | Flux Flow | Transmission Torque | |
|---|---|---|---|---|
| Model 1 |  |  |  | Targeted = 100 Nm Simulation = 95.9 Nm Percentage difference = 4.1% |
| Model 2 |  |  |  | Targeted = 140 Nm Simulation = 140.8 Nm Percentage difference = 0.6% |
| Model 3 |  |  |  | Targeted = 200 Nm Simulation = 194.4 Nm Percentage difference = 2.8% |
| Model 4 |  |  |  | Targeted = 80 Nm Simulation = 84.5 Nm Percentage difference = 0.6% |
| Model 5 |  |  |  | Targeted = 60 Nm Simulation = 54.9 Nm Percentage difference = 8.5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Misron, N.; Mohd Saini, L.; Aris, I.; Vaithilingam, C.A.; Tsuyoshi, H. Simplified Design of Magnetic Gear by Considering the Maximum Transmission Torque Line. Appl. Sci. 2020, 10, 8581. https://doi.org/10.3390/app10238581
Misron N, Mohd Saini L, Aris I, Vaithilingam CA, Tsuyoshi H. Simplified Design of Magnetic Gear by Considering the Maximum Transmission Torque Line. Applied Sciences. 2020; 10(23):8581. https://doi.org/10.3390/app10238581
Chicago/Turabian StyleMisron, Norhisam, Luqman Mohd Saini, Ishak Aris, Chockalingam Aravind Vaithilingam, and Hanamoto Tsuyoshi. 2020. "Simplified Design of Magnetic Gear by Considering the Maximum Transmission Torque Line" Applied Sciences 10, no. 23: 8581. https://doi.org/10.3390/app10238581
APA StyleMisron, N., Mohd Saini, L., Aris, I., Vaithilingam, C. A., & Tsuyoshi, H. (2020). Simplified Design of Magnetic Gear by Considering the Maximum Transmission Torque Line. Applied Sciences, 10(23), 8581. https://doi.org/10.3390/app10238581