Health Indicators Construction for Damage Level Assessment in Bearing Diagnostics: A Proposal of an Energetic Approach Based on Envelope Analysis






Abstract
1. Introduction
2. Materials and Methods
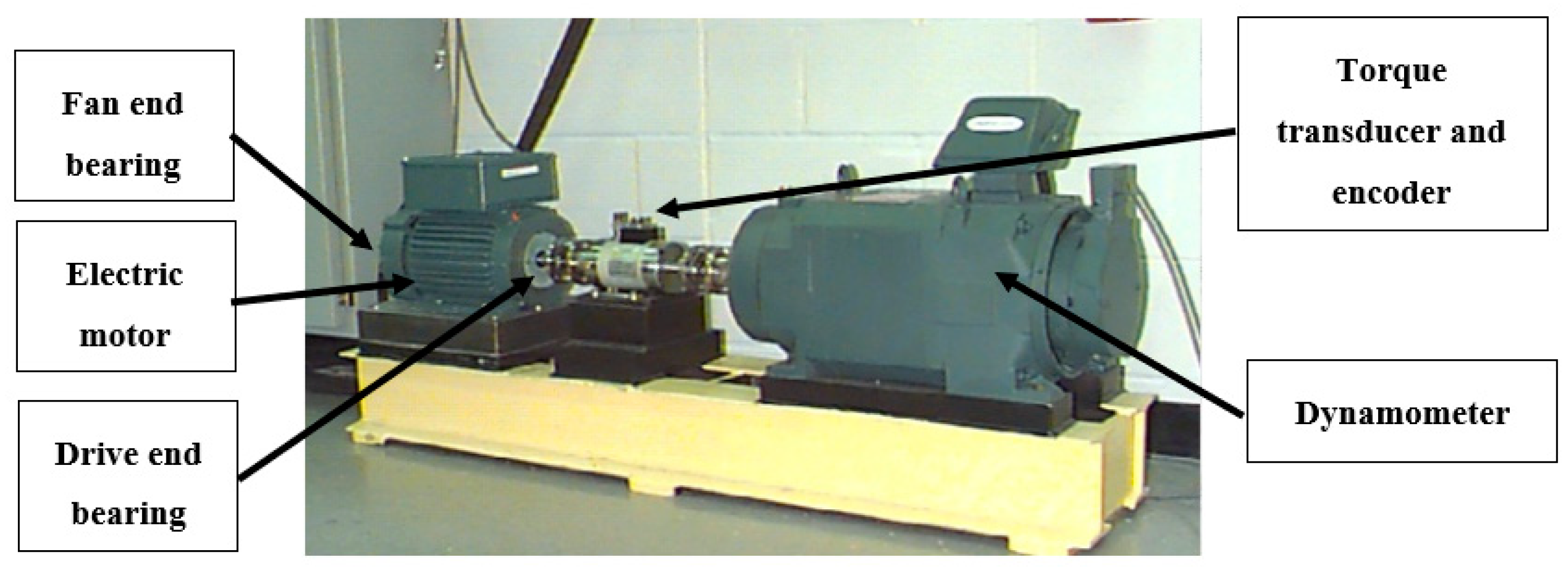
2.1. Case Western Reserve University Bearing Data Set (CWRU)
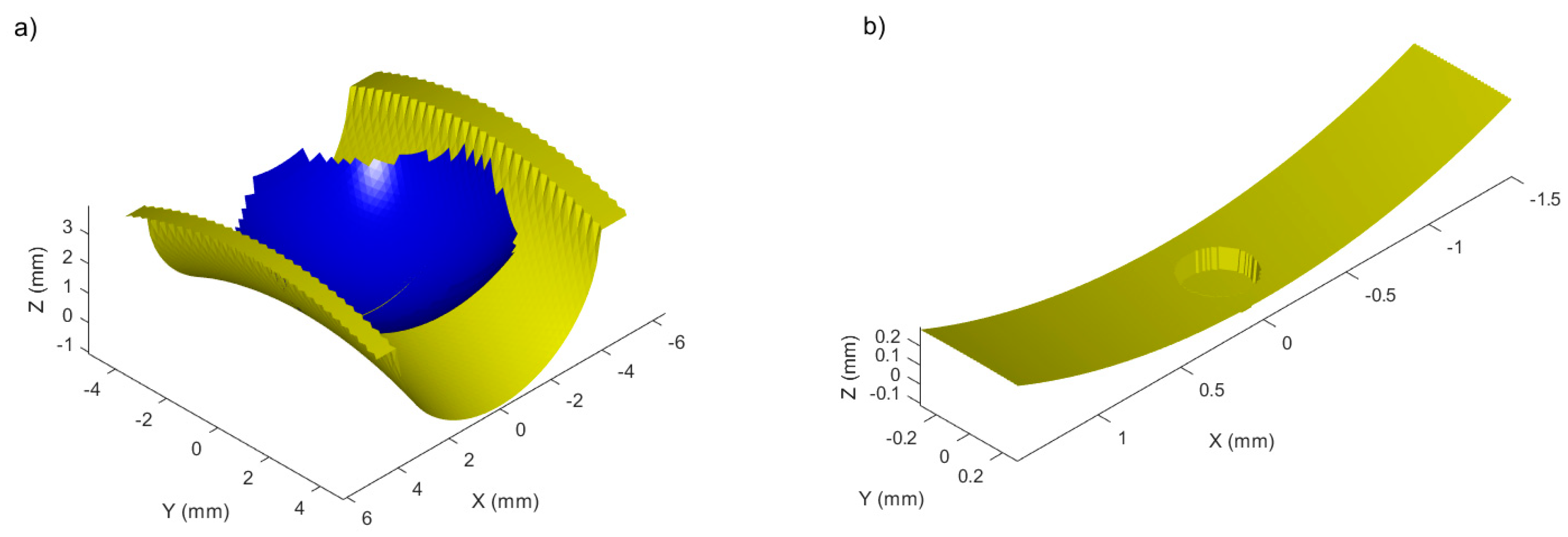
2.2. Non-Hertzian Contact Model
2.3. Damage Detection Analyisis
- Time features (peak values, root mean square (RMS) and crest factor)
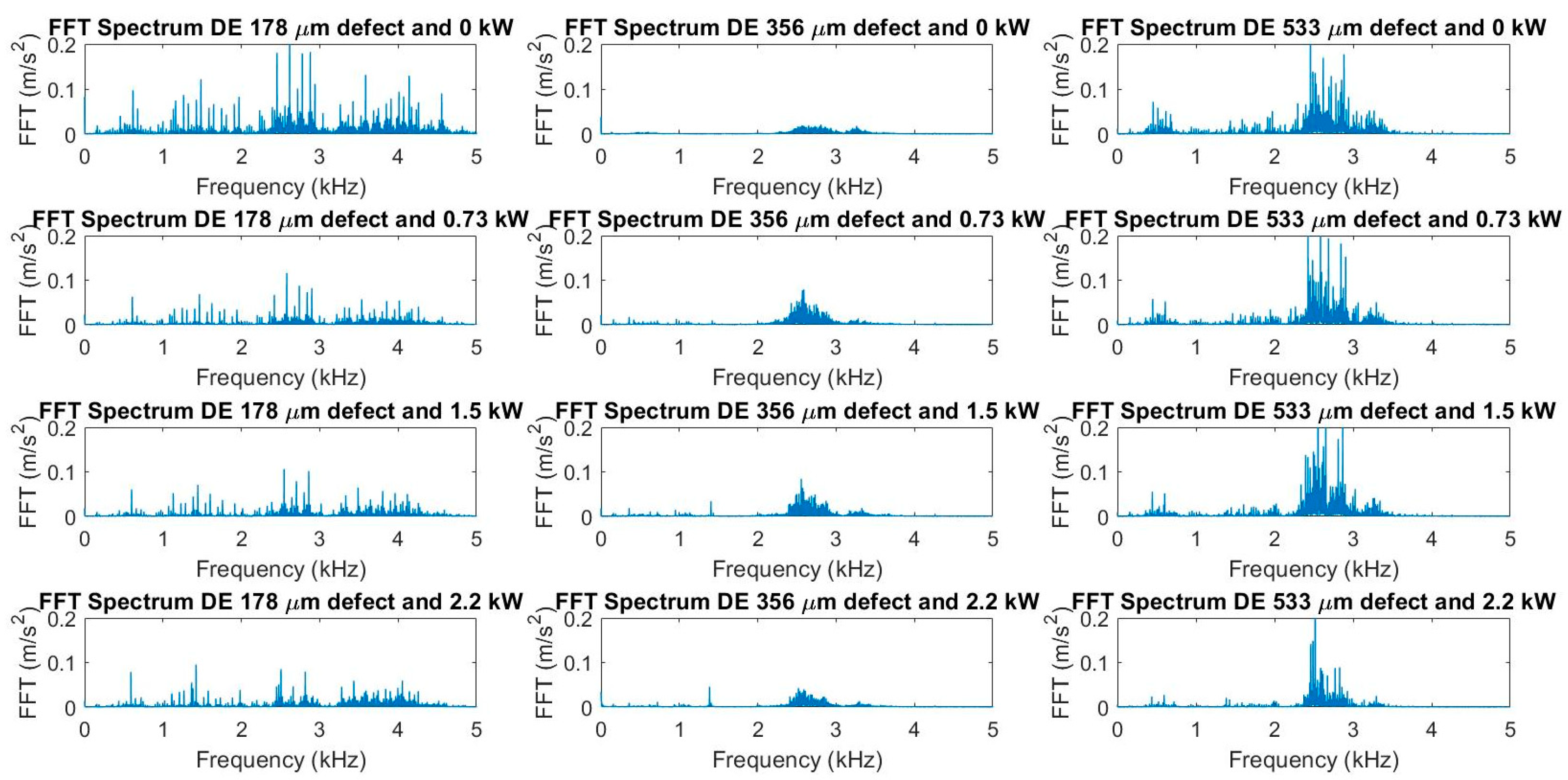
- Frequency features (mean contribution, xN harmonics and xBPFI harmonics)
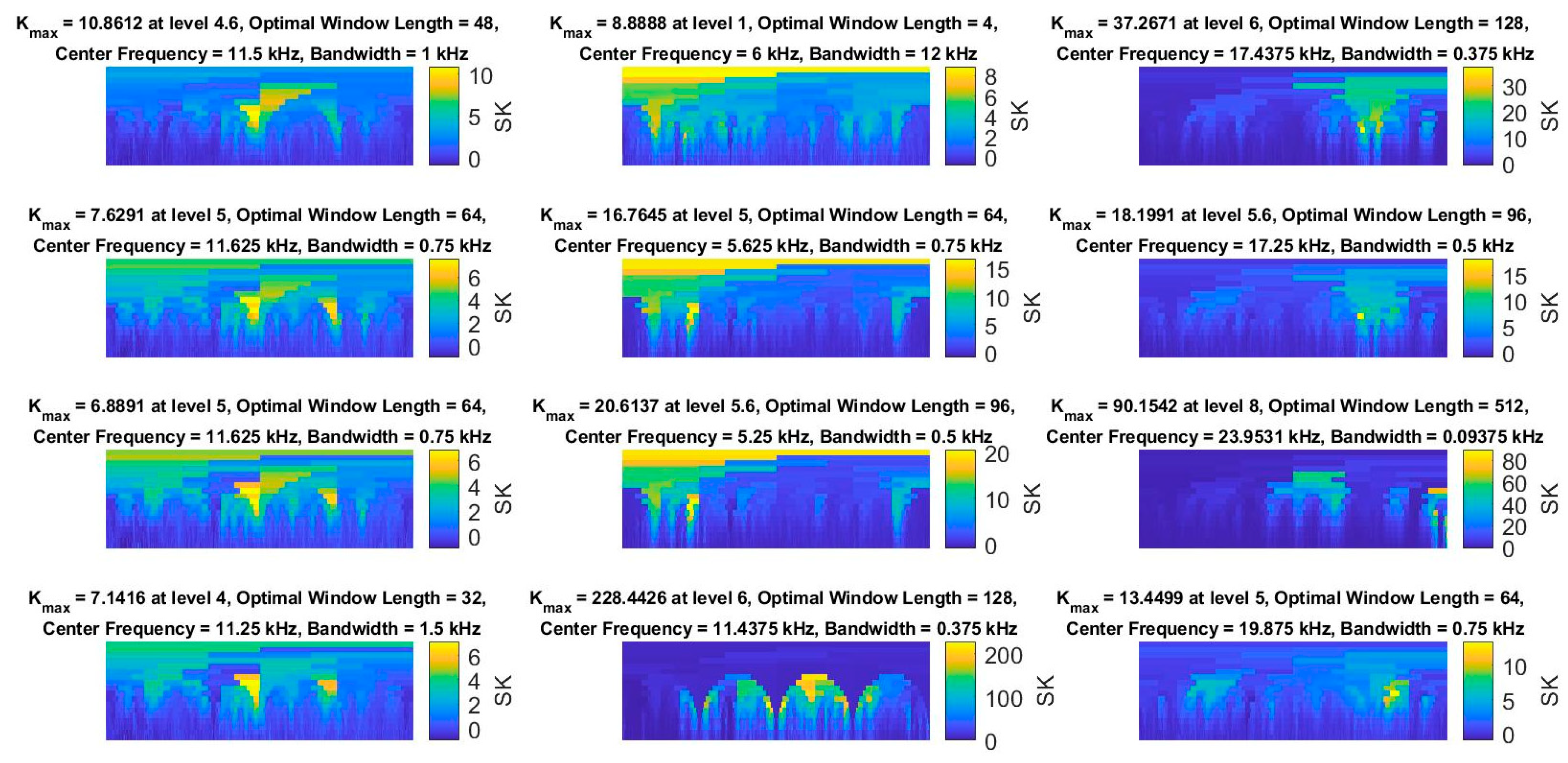
- Enhancement of the nonstationary part (SK and FK)
- Envelope extraction and signal demodulation (xBPFI harmonics of the demodulated signals)
3. Proposed Health Indicators
4. Methodology Application
4.1. Standard Features
4.2. Proposed Health Indicators: Application to the Case-Study
5. Methodology Validation
6. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Randall, R.B. Vibration-Based Condition Monitoring: Industrial, Aerospace and Automotive Applications; John Wiley & Sons: Hoboken, NJ, USA, 2011; ISBN 9780470747858. [Google Scholar]
- Mohanty, A.R. Machinery Condition Monitoring: Principles and Practices; CRC Press: Boca Raton, FL, USA, 2014; ISBN 9781466593053. [Google Scholar]
- Woodley, B.J. Failure prediction by condition monitoring (part 1). Int. J. Mater. Eng. Appl. 1978, 1, 19–26. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Lin, J.; Zhou, X.; Lu, N. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016. [Google Scholar] [CrossRef]
- Ben Ali, J.; Saidi, L.; Mouelhi, A.; Chebel-Morello, B.; Fnaiech, F. Linear feature selection and classification using PNN and SFAM neural networks for a nearly online diagnosis of bearing naturally progressing degradations. Eng. Appl. Artif. Intell. 2015, 42, 67–81. [Google Scholar] [CrossRef]
- Tabrizi, A.; Garibaldi, L.; Fasana, A.; Marchesiello, S. Early damage detection of roller bearings using wavelet packet decomposition, ensemble empirical mode decomposition and support vector machine. Meccanica 2015, 50, 865–874. [Google Scholar] [CrossRef]
- Daga, A.P.; Fasana, A.; Marchesiello, S.; Garibaldi, L. The Politecnico di Torino rolling bearing test rig: Description and analysis of open access data. Mech. Syst. Signal Process. 2019, 120, 252–273. [Google Scholar] [CrossRef]
- Jin, X.; Chow, T.W.S. Anomaly detection of cooling fan and fault classification of induction motor using Mahalanobis-Taguchi system. Expert Syst. Appl. 2013, 40, 5787–5795. [Google Scholar] [CrossRef]
- Jin, X.; Wang, Y.; Chow, T.W.S.; Sun, Y. MD-based approaches for system health monitoring: A review. IET Sci. Meas. Technol. 2017, 11, 371–379. [Google Scholar] [CrossRef]
- Shakya, P.; Kulkarni, M.S.; Darpe, A.K. Bearing diagnosis based on Mahalanobis-Taguchi-Gram-Schmidt method. J. Sound Vib. 2015, 337, 342–362. [Google Scholar] [CrossRef]
- Shen, C.; Wang, D.; Kong, F.; Tse, P.W. Fault diagnosis of rotating machinery based on the statistical parameters of wavelet packet paving and a generic support vector regressive classifier. Meas. J. Int. Meas. Confed. 2013, 46, 1551–1564. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Y.; Zhu, Y. Intelligent fault diagnosis of rolling element bearing based on SVMs and fractal dimension. Mech. Syst. Signal Process. 2007, 21, 2012–2024. [Google Scholar] [CrossRef]
- Liu, R.; Yang, B.; Zio, E.; Chen, X. Artificial intelligence for fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2018, 108, 33–47. [Google Scholar] [CrossRef]
- Pinheiro, A.A.; Brandao, I.M.; Da Costa, C. Vibration Analysis in Turbomachines Using Machine Learning Techniques. Eur. J. Eng. Res. Sci. 2019, 4, 12–16. [Google Scholar] [CrossRef]
- Wang, D.; Tse, P.W.; Guo, W.; Miao, Q. Support vector data description for fusion of multiple health indicators for enhancing gearbox fault diagnosis and prognosis. Meas. Sci. Technol. 2011, 22. [Google Scholar] [CrossRef]
- Baccarini, L.M.R.; Rocha e Silva, V.V.; de Menezes, B.R.; Caminhas, W.M. SVM practical industrial application for mechanical faults diagnostic. Expert Syst. Appl. 2011, 38, 6980–6984. [Google Scholar] [CrossRef]
- Widodo, A.; Yang, B.-S. Support vector machine in machine condition monitoring and fault diagnosis. Mech. Syst. Signal Process. 2007, 21, 2560–2574. [Google Scholar] [CrossRef]
- Liu, Z.; Cao, H.; Chen, X.; He, Z.; Shen, Z. Multi-fault classification based on wavelet SVM with PSO algorithm to analyze vibration signals from rolling element bearings. Neurocomputing 2013, 99, 399–410. [Google Scholar] [CrossRef]
- Mba, D. The use of acoustic emission for estimation of bearing defect size. J. Fail. Anal. Prev. 2008, 8, 188–192. [Google Scholar] [CrossRef]
- Al-Dossary, S.; Hamzah, R.I.R.; Mba, D. Observations of changes in acoustic emission waveform for varying seeded defect sizes in a rolling element bearing. Appl. Acoust. 2009, 70, 58–81. [Google Scholar] [CrossRef]
- Al-Ghamd, A.M.; Mba, D. A comparative experimental study on the use of acoustic emission and vibration analysis for bearing defect identification and estimation of defect size. Mech. Syst. Signal Process. 2006, 20, 1537–1571. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics-A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B. Semi-automated bearing diagnostic-three case studies. Non Destrcutive Test. Aust. 2008, 45, 59. [Google Scholar]
- Abboud, D.; Elbadaoui, M.; Smith, W.A.; Randall, R.B. Advanced bearing diagnostics: A comparative study of two powerful approaches. Mech. Syst. Signal Process. 2019, 114, 604–627. [Google Scholar] [CrossRef]
- Wang, D.; Tsui, K.-L.; Miao, Q. Prognostics and Health Management: A Review of Vibration Based Bearing and Gear Health Indicators. IEEE Access 2018, 6, 665–676. [Google Scholar] [CrossRef]
- Sinha, J.K.; Elbhbah, K. A future possibility of vibration based condition monitoring of rotating machines. Mech. Syst. Signal Process. 2013, 34, 231–240. [Google Scholar] [CrossRef]
- Rai, A.; Upadhyay, S.H. A review on signal processing techniques utilized in the fault diagnosis of rolling element bearings. Tribol. Int. 2016. [Google Scholar] [CrossRef]
- De Azevedo, H.D.M.; Araújo, A.M.; Bouchonneau, N. A review of wind turbine bearing condition monitoring: State of the art and challenges. Renew. Sustain. Energy Rev. 2016, 56, 368–379. [Google Scholar] [CrossRef]
- Genta, G. Dynamics of Rotating Systems; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Genta, G.; Delprete, C.; Brusa, E. Some considerations on the basic assumptions in rotordynamics. J. Sound Vib. 1999, 227, 611–645. [Google Scholar] [CrossRef]
- Burchill, R.F.; John, L.F.; Wilson, D.S. New Machinery Health Diagnostic Techniques Using High-Frequency Biration; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1973. [Google Scholar]
- Burchill, R.F. Resonant structure techniques for bearing fault analysis. Natl. Bur. Stand. NBSIR 1973, 73, 252. [Google Scholar]
- Darlow, M.; Badgley, R.H. Early Detection of Defects in Rolling-Element Bearings; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1975. [Google Scholar]
- Harting, D.R. Demodulated resonance analysis—A powerful incipient failure detection technique. ISAT 1978, 17, 35–40. [Google Scholar]
- McFadden, P.D.; Smith, J.D. Vibration monitoring of rolling element bearings by the high-frequency resonance technique—A review. Tribol. Int. 1984, 17, 3–10. [Google Scholar] [CrossRef]
- McFadden, P.D.; Smith, J.D. Model for the vibration produced by a single point defect in a rolling element bearing. J. Sound Vib. 1984, 96, 69–82. [Google Scholar] [CrossRef]
- Rubini, R.; Meneghetti, U. Application of the envelope and wavelet transform analyses for the diagnosis of incipient faults in ball bearings. Mech. Syst. Signal Process. 2001, 15, 287–302. [Google Scholar] [CrossRef]
- Smith, W.A.; Randall, R.B. Rolling element bearing diagnostics using the Case Western Reserve University data: A benchmark study. Mech. Syst. Signal Process. 2015, 64–65, 100–131. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J.; Chobsaard, S. The relationship between spectral correlation and envelope analysis in the diagnostics of bearing faults and other cyclostationary machine signals. Mech. Syst. Signal Process. 2001, 15, 945–962. [Google Scholar] [CrossRef]
- Mauricio, A.; Smith, W.; Randall, R.B.; Antoni, J.; Gryllias, K. Cyclostationary-based tools for bearing diagnostics. In Proceedings of the ISMA 2016 Including USD, Leuven, Belgium, 19–21 September 2016; pp. 905–918. [Google Scholar]
- Delprete, C.; Milanesio, M.; Rosso, C. Rolling bearings monitoring and damage detection methodology. Appl. Mech. Mater. 2005, 3–4, 293–302. [Google Scholar] [CrossRef]
- Brusa, E.; Bruzzone, F.; Delprete, C.; Di Maggio, L.G.; Rosso, C. A Proposal of a Technique for Correlating Defect Dimensions to Vibration Amplitude in Bearing Monitoring. In Proceedings of the PHM Society European Conference, Turin, Italy, 27–31 July 2020; pp. 1–14. [Google Scholar]
- Delprete, C.; Brusa, E.; Rosso, C.; Bruzzone, F. Bearing Health Monitoring Based on the Orthogonal Empirical Mode Decomposition. Shock Vib. 2020, 2020. [Google Scholar] [CrossRef]
- Antoni, J.; Randall, R.B. The spectral kurtosis: Application to the vibratory surveillance and diagnostics of rotating machines. Mech. Syst. Signal Process. 2006, 20, 308–331. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis of nonstationary signals: Formalisation, some properties, and application. In Proceedings of the 2004 12th European Signal Processing Conference, Vienna, Austria, 6–10 September 2004; IEEE: Piscataway, NJ, USA, 2015; pp. 1167–1170. [Google Scholar]
- Antoni, J. The spectral kurtosis: A useful tool for characterising non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Wang, D. Some further thoughts about spectral kurtosis, spectral L2/L1 norm, spectral smoothness index and spectral Gini index for characterizing repetitive transients. Mech. Syst. Signal Process. 2018, 108, 58–72. [Google Scholar] [CrossRef]
- Wang, D. Spectral L2/L1 norm: A new perspective for spectral kurtosis for characterizing non-stationary signals. Mech. Syst. Signal Process. 2018, 104, 290–293. [Google Scholar] [CrossRef]
- Moshrefzadeh, A.; Fasana, A. The Autogram: An effective approach for selecting the optimal demodulation band in rolling element bearings diagnosis. Mech. Syst. Signal Process. 2018. [Google Scholar] [CrossRef]
- Antoni, J. The infogram: Entropic evidence of the signature of repetitive transients. Mech. Syst. Signal Process. 2016, 74, 73–94. [Google Scholar] [CrossRef]
- Bonnardot, F.; Randall, R.B. Enanched unsupervised noise cancellation using angular resampling for planetary bearing fault diagnosis. Int. J. Acoust. Vib. 2004, 9, 51–60. [Google Scholar]
- Abboud, D.; Antoni, J.; Sieg-Zieba, S.; Eltabach, M. Envelope analysis of rotating machine vibrations in variable speed conditions: A comprehensive treatment. Mech. Syst. Signal Process. 2017, 84, 200–226. [Google Scholar] [CrossRef]
- Marmo, F.; Toraldo, F.; Rosati, A.; Rosati, L. Numerical solution of smooth and rough contact problems. Tribol. Int. 2018, 53, 1415–1440. [Google Scholar] [CrossRef]
- Case Western Reserve University Bearing Data Center Website. Available online: https://csegroups.case.edu/bearingdatacenter/pages (accessed on 3 August 2020).
- Li, Y.; Xu, M.; Wei, Y.; Huang, W. A new rolling bearing fault diagnosis method based on multiscale permutation entropy and improved support vector machine based binary tree. Meas. J. Int. Meas. Confed. 2016, 77, 80–94. [Google Scholar] [CrossRef]
- Lei, Y.; He, Z.; Zi, Y. A new approach to intelligent fault diagnosis of rotating machinery. Expert Syst. Appl. 2008, 35, 1593–1600. [Google Scholar] [CrossRef]
- Liu, H.; Han, M. A fault diagnosis method based on local mean decomposition and multi-scale entropy for roller bearings. Mech. Mach. Theory 2014, 75, 67–78. [Google Scholar] [CrossRef]
- Li, W.; Qiu, M.; Zhu, Z.; Wu, B.; Zhou, G. Bearing fault diagnosis based on spectrum images of vibration signals. Meas. Sci. Technol. 2016, 27. [Google Scholar] [CrossRef]
- Li, B.; Zhang, Y. Supervised locally linear embedding projection (SLLEP) for machinery fault diagnosis. Mech. Syst. Signal Process. 2011, 25, 3125–3134. [Google Scholar] [CrossRef]
- Johnson, K.L. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1987. [Google Scholar]
- Kalker, J.J. Three-Dimensional Elastic Bodies in Rolling Contact; Springer: Berlin, Germany, 1990. [Google Scholar]
- Wriggers, P. Computational Contact Mechanics; Springer: Berlin, Germany, 2002. [Google Scholar]
- Sayles, R.S. Basic principles of rough surface rough contact analysis using numerical methods. Tribol. Int. 1996, 29, 639–650. [Google Scholar] [CrossRef]
- Kalker, J.J.; Van Randen, Y. A minimum principle for frictionless elastic contact with application to non-Hertzian half-space contact problems. J. Eng. Math. 1972, 6, 193–206. [Google Scholar] [CrossRef]
- Boedo, S. A corrected displacement solution to linearly varying surface pressure over a triangular region on the elastic half-space. Tribol. Int. 2013, 60, 116–118. [Google Scholar] [CrossRef]
- Donoho, D.L.; Johnstone, J.M. Ideal spatial adaptation by wavelet shrinkage. Biometrika 1994, 81, 425–455. [Google Scholar] [CrossRef]
- Qiu, H.; Lee, J.; Lin, J.; Yu, G. Wavelet filter-based weak signature detection method and its application on rolling element bearing prognostics. J. Sound Vib. 2006, 289, 1066–1090. [Google Scholar] [CrossRef]
- Wang, D.; Tse, P.W.; Tsui, K.-L. An enhanced Kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2013, 35, 176–199. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, T.-W.; Na, J.; Fung, R.-F. Envelope order tracking for fault detection in rolling element bearings. J. Sound Vib. 2012, 331, 5644–5654. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing | Designation | BPFI—Multiple of Shaft Speed | |
|---|---|---|---|
| DE | SKF 6205-2RS JEM 1 | 5.415 | 0.335 |
| FE | SKF 6203-2RS JEM | 4.947 | 0.200 |
| Damage Diameter (in) | Damage Depth (in) | Power (hp) | Fs—Sampling Frequency (kHz) | M—Number of Samples | T—Time Duration (s) |
|---|---|---|---|---|---|
| Baseline | Baseline | 0-1-2-3 | 48 | 63,788 | 1.33 |
| 0.007(0.18 mm) | 0.011(0.28 mm) | 0-1-2-3 | 48 | 63,788 | 1.33 |
| 0.014(0.35 mm) | 0.011(0.28 mm) | 0-1-2-3 | 48 | 63,788 | 1.33 |
| 0.021(0.53 mm) | 0.011(0.28 mm) | 0-1-2-3 | 48 | 63,788 | 1.33 |
| Damage Diameter (in) | Damage Depth (in) | Load—Fraction of Pu | Fs—Sampling Frequency (kHz) | M—Number of Samples | T—Time Duration (s) |
|---|---|---|---|---|---|
| 0.007 (0.18 mm) | 0.011 (0.28 mm) | 1/8-1/4-1/2 | 48 | 63,788 | 1.33 |
| 0.014 (0.35 mm) | 0.011 (0.28 mm) | 1/8-1/4-1/2 | 48 | 63,788 | 1.33 |
| 0.021 (0.53 mm) | 0.011 (0.28 mm) | 1/8-1/4-1/2 | 48 | 63,788 | 1.33 |
| Signal Type | ||||
|---|---|---|---|---|
| Vibration | 1.50 | 1xBPFI | 8 | 12.03 |
| Pressure | 1.50 | 1xBPFI | 8 | 12.03 |
| Health Indicator | r—Correlation Coefficient | R2—Coefficient of Determination |
|---|---|---|
| HI—damage-related power | 0.89 | 0.79 |
| NPSD | 0.96 | 0.92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brusa, E.; Bruzzone, F.; Delprete, C.; Di Maggio, L.G.; Rosso, C. Health Indicators Construction for Damage Level Assessment in Bearing Diagnostics: A Proposal of an Energetic Approach Based on Envelope Analysis. Appl. Sci. 2020, 10, 8131. https://doi.org/10.3390/app10228131
Brusa E, Bruzzone F, Delprete C, Di Maggio LG, Rosso C. Health Indicators Construction for Damage Level Assessment in Bearing Diagnostics: A Proposal of an Energetic Approach Based on Envelope Analysis. Applied Sciences. 2020; 10(22):8131. https://doi.org/10.3390/app10228131
Chicago/Turabian StyleBrusa, Eugenio, Fabio Bruzzone, Cristiana Delprete, Luigi Gianpio Di Maggio, and Carlo Rosso. 2020. "Health Indicators Construction for Damage Level Assessment in Bearing Diagnostics: A Proposal of an Energetic Approach Based on Envelope Analysis" Applied Sciences 10, no. 22: 8131. https://doi.org/10.3390/app10228131
APA StyleBrusa, E., Bruzzone, F., Delprete, C., Di Maggio, L. G., & Rosso, C. (2020). Health Indicators Construction for Damage Level Assessment in Bearing Diagnostics: A Proposal of an Energetic Approach Based on Envelope Analysis. Applied Sciences, 10(22), 8131. https://doi.org/10.3390/app10228131