Identifying Critical Clusters of Traffic-Loading Events in Recurrent Congested Conditions on a Long-Span Road Bridge

 ,
,  ,
,  , and
, and
Abstract
1. Introduction
2. Forth Road Bridge Vehicle Length Data
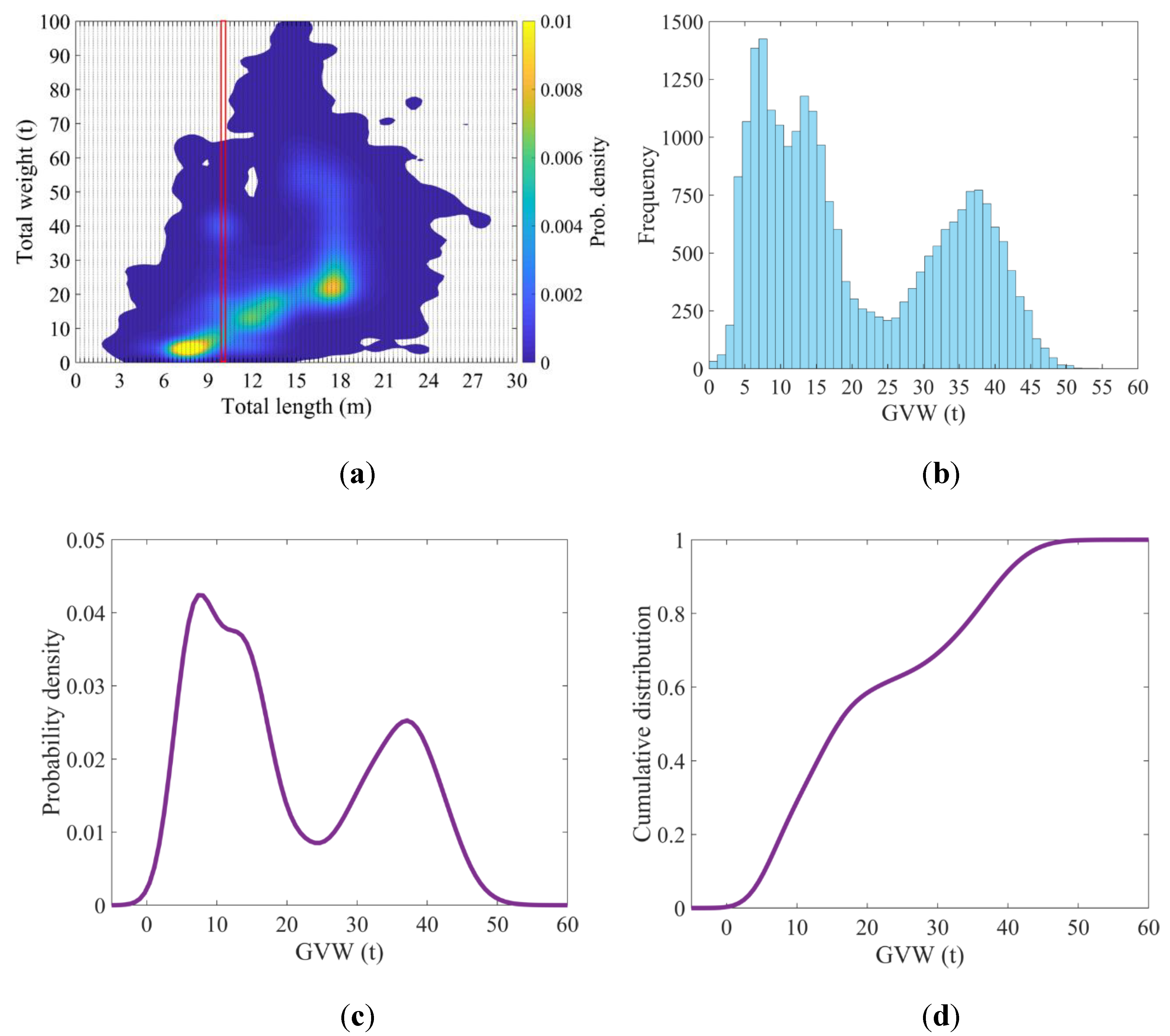
2.1. Vehicle Lengths in Traffic Image Data
3. Cluster Analysis for Data Classification
4. Critical Cluster for Traffic Loading
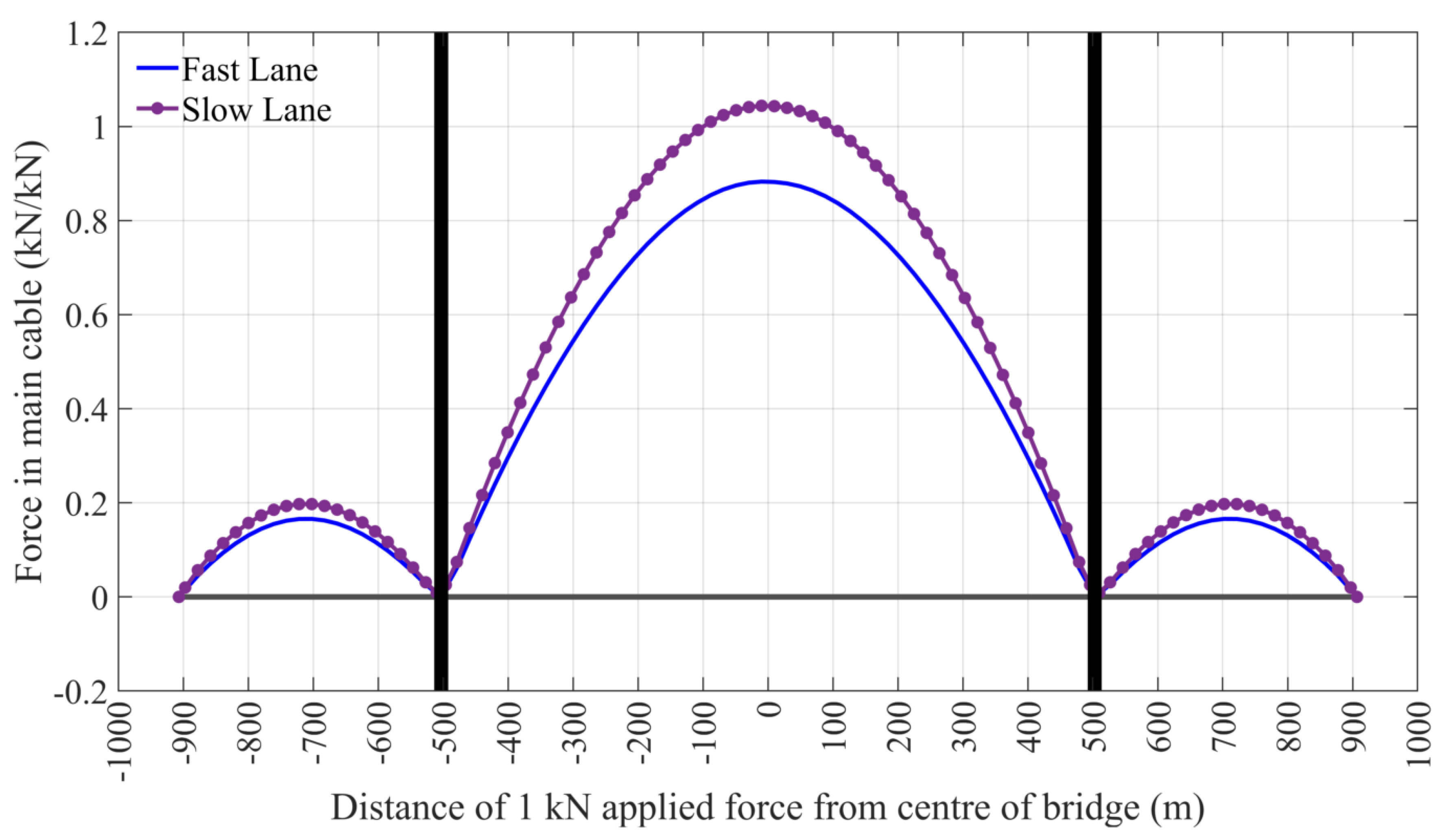
4.1. Influence of Bridge Length
4.2. Critical Loading Conditions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Buckland, P.G.; McBryde, J.P.; Navin, F.P.; Zidek, J.V. Traffic loading of long span bridges. Bridge Eng. 1978, 2, 146–154. [Google Scholar]
- Buckland, P.G.; Navin, F.P.D.; Zidek, J.V.; McBryde, J.P. Proposed vehicle loading of long-span bridges. J. Struct. Div. 1980, 106, 915–932. [Google Scholar]
- Al-Kaisy, A.F.; Hall, F.L.; Reisman, E.S. Developing passenger car equivalents for heavy vehicles on freeways during queue discharge flow. Transp. Res. Part A Policy Pr. 2002, 36, 725–742. [Google Scholar] [CrossRef]
- Ivy, R.J.; Lin, T.Y.; Mitchell, S.; Raab, N.C.; Richey, V.J.; Scheffey, C.F. Live Loading for Long-Span Highway Bridges; American Society of Civil Engineers Transactions: Washington, DC, USA, 1954. [Google Scholar]
- Getachew, A. Traffic Load Effects on Bridges, Statistical Analysis of Collected and Monte Carlo Simulated Vehicle Data. Ph.D. Thesis, Royal Institute of Technology, Stockholm, Sweden, 2003. [Google Scholar]
- Caprani, C.C.; OBrien, E.J. The governing form of traffic for highway bridge loading. In Proceedings of the 4th Symposium on Bridge and Infrastructure Research in Ireland, Galway, Ireland, 4–5 December 2008; pp. 53–60. [Google Scholar]
- Moses, F. Weigh-in-Motion System Using Instrumented Bridges. Transp. Eng. J. ASCE 1979, 105, 233–249. [Google Scholar]
- OBrien, E.J.; Žnidarič, A.; Ojio, T. Bridge weigh-in-motion-Latest developments and applications world wide. In Proceedings of the International Conference on Heavy Vehicles, Paris, France, 19–22 May 2008; pp. 19–22. [Google Scholar]
- Obrien, E.J.; Lipari, A.; Caprani, C. Micro-simulation of single-lane traffic to identify critical loading conditions for long-span bridges. Eng. Struct. 2015, 94, 137–148. [Google Scholar] [CrossRef]
- Bailey, S.F. Basic Principles and Load Models for the Structural Safety Evaluation of Existing Road Bridges; Civil Engineering, Ecole Polytechnique Fédérale de Lausanne: Lausanne, Switzerland, 1996. [Google Scholar]
- Bruls, A.; Croce, P.; Sanpaolesi, L.; Sedlacek, G. ENV 1991-Part 3: Traffic Loads on Bridges Calibration of Road Load Models for Road Bridges, IABSE REPORTS: Basis of Design and Actions on Structures; Background and application of Eurocode 1; IABSE: Delft, The Netherlands, 1996; pp. 439–454. [Google Scholar]
- Buckland, P.G. North-American and British Long-Span Bridge Loads. J. Struct. Eng. 1991, 117, 2972–2987. [Google Scholar] [CrossRef]
- Hayrapetova, A.; O’Connor, A.; Obrien, E.J. Traffic Load Models for Long Span Bridges, Bridge Maintenance, Safety, Management, Resilience & Sustainability; Taylor & Francis Group: Stresa, Italy, 2012; pp. 2589–2596. [Google Scholar]
- O’Brien, E.; Hayrapetova, A.; Walsh, C. The use of micro-simulation for congested traffic load modeling of medium- and long-span bridges. Struct. Infrastruct. Eng. 2012, 8, 269–276. [Google Scholar] [CrossRef]
- Vrouwenvelder, A.C.W.M.; Waarts, P.H. Traffic Loads on Bridges. Struct. Eng. Int. 1993, 3, 169–177. [Google Scholar] [CrossRef]
- Ditlevsen, O. Traffic Loads on Large Bridges Modeled as White-Noise Fields. J. Eng. Mech. 1994, 120, 681–694. [Google Scholar] [CrossRef]
- Paeglitis, A.; Freimanis, A. Comparision of constant-span and influence line methods for long-span bridge load calculations. Balt. J. Road Bridg. Eng. 2016, 11, 84–91. [Google Scholar] [CrossRef]
- Lutomirska, M.; Nowak, A. Live Load Models for Long Span Bridges; Civil Engineering, University of Nebraska: Lincoln, NE, USA, 2009. [Google Scholar]
- Nowak, A.; Lutomirska, M.; Ibrahim, F.S. The development of live load for long span bridges. Bridg. Struct. 2010, 6, 73–79. [Google Scholar] [CrossRef]
- Nowak, A.; Hong, Y. Bridge Live-Load Models. J. Struct. Eng. 1991, 117, 2757–2767. [Google Scholar] [CrossRef]
- Caprani, C. Using microsimulation to estimate highway bridge traffic load. In Proceedings of the 5th International Conference on Bridge Maintenance, Safety, Management, Resilience and Sustainability, Philadelphia, PA, USA, 11–15 July 2010. [Google Scholar]
- Enright, B.; Carey, C.; Caprani, C. Microsimulation Evaluation of Eurocode Load Model for American Long-Span Bridges. J. Bridge Eng. 2013, 18, 1252–1260. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Microscopic simulation of congested traffic. In Traffic and Granular Flow’99; Helbing, D., Herrmann, H.J., Schreckenberg, M., Wolf, D.E., Eds.; Springer: Berlin/Heidelberg, Germany, 2000; pp. 365–376. [Google Scholar]
- Caprani, C.; Obrien, E.J.; Lipari, A. Long-span bridge traffic loading based on multi-lane traffic micro-simulation. Eng. Struct. 2016, 115, 207–219. [Google Scholar] [CrossRef]
- Hidas, P.; Wagner, P. Review of data collection methods for microscopic traffic simulation. In Proceedings of the 10th World Conference on Transport Research Istanbul, Istanbul, Turkey, 4–8 July 2004. [Google Scholar]
- Treiterer, J.; Myers, J. The hysteresis phenomenon in traffic flow. In Proceedings of the 6th International Symposium on Transportation and Traffic Theory, Sydney, Australia, 26–28 August 1974; pp. 13–38. [Google Scholar]
- Wang, L.; Chen, F.; Yin, H. Detecting and tracking vehicles in traffic by unmanned aerial vehicles. Autom. Constr. 2016, 72, 294–308. [Google Scholar] [CrossRef]
- Xu, J.; Wang, G.; Sun, F. A novel method for detecting and tracking vehicles in traffic-image sequence. In Proceedings of the Fifth International Conference on Digital Image Processing (ICDIP 2013), Beijing, China, 21–22 April 2013. [Google Scholar]
- Zhang, G.; Avery, R.P.; Wang, Y. Video-Based Vehicle Detection and Classification System for Real-Time Traffic Data Collection Using Uncalibrated Video Cameras. Transp. Res. Rec. J. Transp. Res. Board 2007, 1993, 138–147. [Google Scholar] [CrossRef]
- Morris, B.; Trivedi, M. Robust classification and tracking of vehicles in traffic video streams. In Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 1078–1083. [Google Scholar]
- Coifman, B.; Beymer, D.; Mclauchlan, P.; Malik, J. A real-time computer vision system for vehicle tracking and traffic surveillance. Transp. Res. Part C Emerg. Technol. 1998, 6, 271–288. [Google Scholar] [CrossRef]
- Reinartz, P.; Lachaise, M.; Schmeer, E.; Krauss, T.; Runge, H. Traffic monitoring with serial images from airborne cameras. ISPRS J. Photogramm. Remote. Sens. 2006, 61, 149–158. [Google Scholar] [CrossRef]
- Farnebäck, G.; Nordberg, K. Motion detection in the WITAS project. In Proceedings of the Swedish Symposium on Image Analysis (SSBA), Lund, Sweden, 13–14 March 2008; pp. 99–102. [Google Scholar]
- Fu, T.; Zangenehpour, S.; St-Aubin, P.; Fu, L.; Miranda-Moreno, L.F. Using microscopic video data measures for driver behavior analysis during adverse winter weather: Opportunities and challenges. J. Mod. Transp. 2015, 23, 81–92. [Google Scholar] [CrossRef]
- Ricketts, N.; Page, J. Traffic Data for Highway Bridge Loading; TRL REPORT 251; Transport Research Laboratory: Crowthorne, UK, 1997. [Google Scholar]
- Micu, E.A.; Obrien, E.J.; Malekjafarian, A.; Quilligan, M. Estimation of Extreme Load Effects on Long-Span Bridges Using Traffic Image Data. Balt. J. Road Bridge Eng. 2018, 13, 429–446. [Google Scholar] [CrossRef]
- Micu, E.A.; McKinstray, R.; Angus, E.; OBrien, E.J.; Malekjafarian, A.; Lydon, M. Estimation of traffic load effects on Forth Road Bridge using camera measurements. In Civil Engineering Research in Ireland 2018 (CERI2018); Pakrashi, V., Keenahan, J., Eds.; Civil Engineering Research Association of Ireland: Dublin, Ireland, 2018; pp. 79–83. [Google Scholar]
- Bradley, D.; Roth, G. Adaptive Thresholding using the Integral Image. J. Graph. Tools 2007, 12, 13–21. [Google Scholar] [CrossRef]
- Vincent, L. Morphological grayscale reconstruction in image analysis: Applications and efficient algorithms. IEEE Trans. Image Process. 1993, 2, 176–201. [Google Scholar] [CrossRef] [PubMed]
- Micu, E.A.; Malekjafarian, A.; Obrien, E.J.; Quilligan, M.; McKinstray, R.; Angus, E.; Lydon, M.; Catbas, F.N. Evaluation of the extreme traffic load effects on the Forth Road Bridge using image analysis of traffic data. Adv. Eng. Softw. 2019, 137, 102711. [Google Scholar] [CrossRef]
- McKinstray, R.; Angus, E.; OBrien, E.J.; Micu, E.A.; Malekjafarian, A.; Lydon, M. Image data for bridge traffic load monitoring on Forth Road Bridge. In Proceedings of the 17th European Bridge Conference, Edinburgh, Scotland, 15–17 May 2018. [Google Scholar]
- Enright, B. Simulation of Traffic Loading on Highway Bridges. Ph.D. Thesis, University College Dublin, Dublin, Ireland, 2010. [Google Scholar]
- Jones, M.C.; Kappenman, R.F. On a Class of Kernel Density Estimate Bandwidth Selectors. Scand. J. Stat. 1992, 19, 337–349. [Google Scholar]
- Gan, G.; Ma, C.; Wu, J. Data Clustering: Theory, Algorithms, and Applications; SIAM: Philadelphia, PA, USA, 2007. [Google Scholar]
- Kaufman, L.; Rousseeuw, P.J. Finding Groups in Data: An Introduction to Cluster Analysis; John Wiley & Sons: New York, NY, USA, 2009; Volume 344. [Google Scholar]
- McLachlan, G.J.; Peel, D. Finite Mixture Models; John Wiley & Sons, Inc.: New York, NY, USA, 2000. [Google Scholar]
- Everitt, B.S.; Landau, S.; Leese, M.; Stahl, D. Cluster Analysis, 5th ed.; John Wiley & Sons, Inc.: New York, NY, USA, 2011. [Google Scholar]
- Biernacki, C.; Celeux, G.; Govaert, G. Choosing starting values for the EM algorithm for getting the highest likelihood in multivariate Gaussian mixture models. Comput. Stat. Data Anal. 2003, 41, 561–575. [Google Scholar] [CrossRef]
- Hansen, P.; Jaumard, B.; Simeone, B. Espaliers: A generalization of dendrograms. J. Classif. 1996, 13, 107–127. [Google Scholar] [CrossRef]
- Castillo, E. Extreme Value Theory in Engineering; Academic Press: New York, NY, USA, 1988. [Google Scholar]
- Benjamin, J.R.; Cornell, C.A. Probability, Statistics and Decision for Civil Engineers; McGraw-Hill: New York, NY, USA, 1970. [Google Scholar]
- Micu, E.A. Using Traffic Image Data for Load Monitoring on Long-Span Bridges; University College Dublin: Dublin, Ireland, 2019. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cluster No. | Name | Symbols in Figure 5 | Traffic Characteristics | Mean Percentage of Trucks | No. of Hours | No. of Days |
|---|---|---|---|---|---|---|
| 1 | LTMF | Red circles | Low % trucks & up to medium flow | 3.6 % | 478 | 130 |
| 2 | LTHF | Lilac stars | Low % trucks & up to high flow | 2.3 % | 443 | 116 |
| 3 | HTLF | Green squares | High % trucks & low flow | 15.6 % | 146 | 113 |
| 4 | MTHF | Navy blue crosses | Up to medium % trucks & up to high flow | 7.1 % | 940 | 127 |
| Bridge No. | Main Span (m) | Total Length (m) |
|---|---|---|
| 1 | 800 | 1441 |
| 2 (FRB) | 1006 | 1813 |
| 3 | 1200 | 2174 |
| 4 | 1400 | 2524 |
| 5 | 1600 | 2897 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Micu, E.A.; OBrien, E.J.; Malekjafarian, A.; McKinstray, R.; Angus, E.; Lydon, M.; Catbas, F.N. Identifying Critical Clusters of Traffic-Loading Events in Recurrent Congested Conditions on a Long-Span Road Bridge. Appl. Sci. 2020, 10, 5423. https://doi.org/10.3390/app10165423
Micu EA, OBrien EJ, Malekjafarian A, McKinstray R, Angus E, Lydon M, Catbas FN. Identifying Critical Clusters of Traffic-Loading Events in Recurrent Congested Conditions on a Long-Span Road Bridge. Applied Sciences. 2020; 10(16):5423. https://doi.org/10.3390/app10165423
Chicago/Turabian StyleMicu, E. Alexandra, Eugene J. OBrien, Abdollah Malekjafarian, Ross McKinstray, Ewan Angus, Myra Lydon, and F. Necati Catbas. 2020. "Identifying Critical Clusters of Traffic-Loading Events in Recurrent Congested Conditions on a Long-Span Road Bridge" Applied Sciences 10, no. 16: 5423. https://doi.org/10.3390/app10165423
APA StyleMicu, E. A., OBrien, E. J., Malekjafarian, A., McKinstray, R., Angus, E., Lydon, M., & Catbas, F. N. (2020). Identifying Critical Clusters of Traffic-Loading Events in Recurrent Congested Conditions on a Long-Span Road Bridge. Applied Sciences, 10(16), 5423. https://doi.org/10.3390/app10165423