Adaptive Cruise Control for Eco-Driving Based on Model Predictive Control Algorithm



Abstract
1. Introduction
2. Materials and Methods
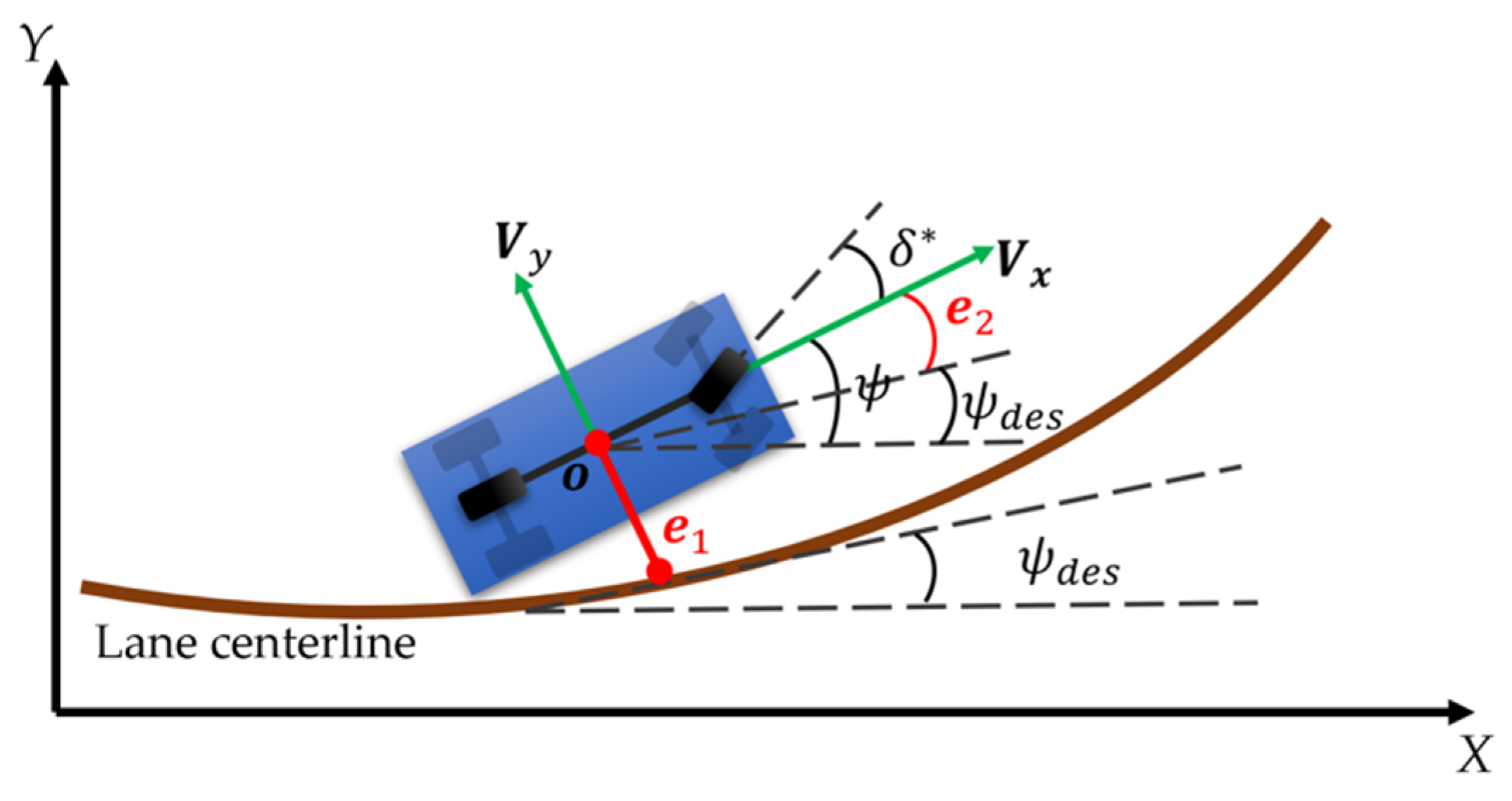
2.1. Vehicle Dynamics Modeling
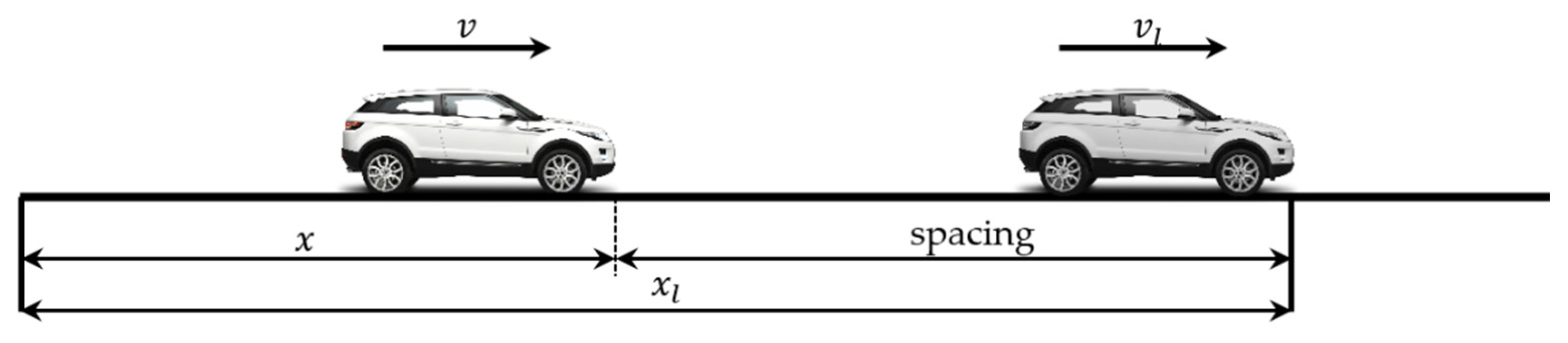
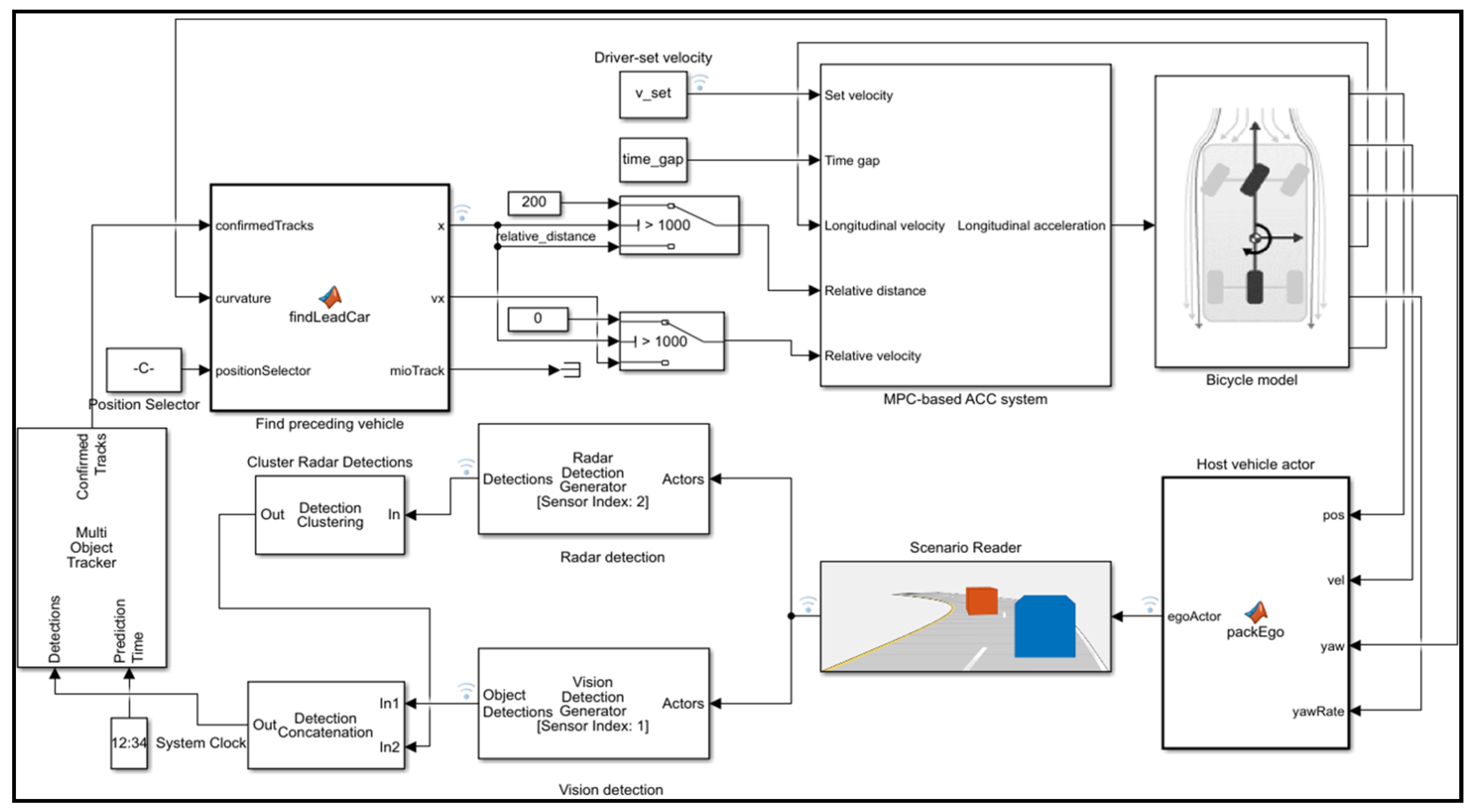
2.2. Adaptive Cruise Control System Modeling
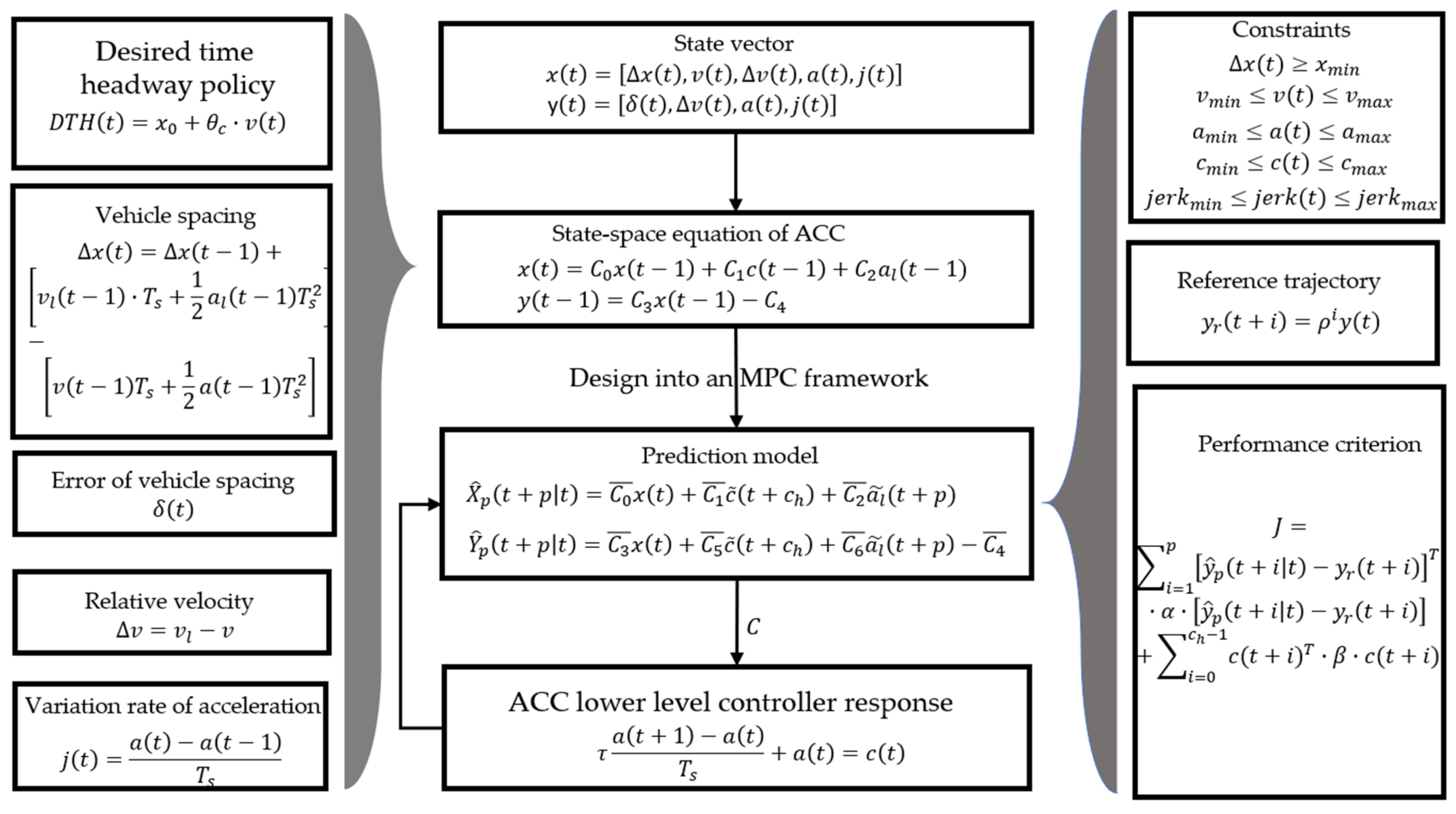
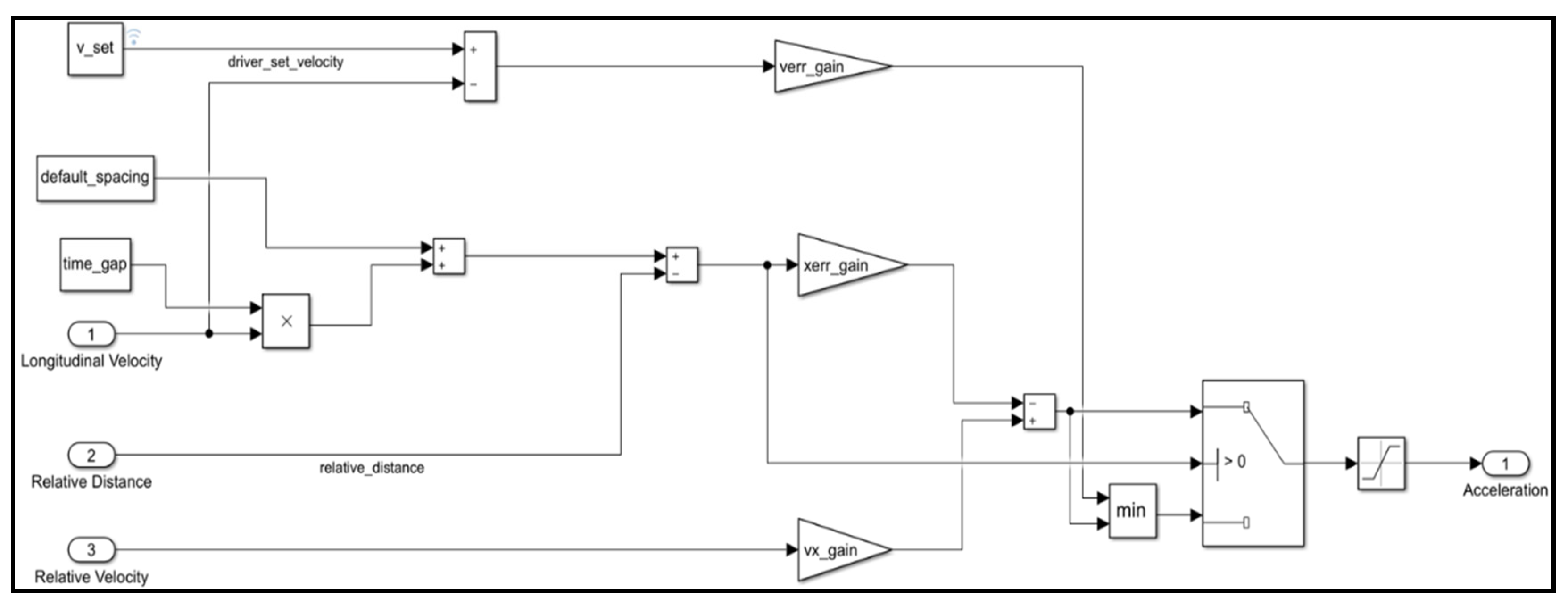
2.3. Framework of Model-Predictive Controller
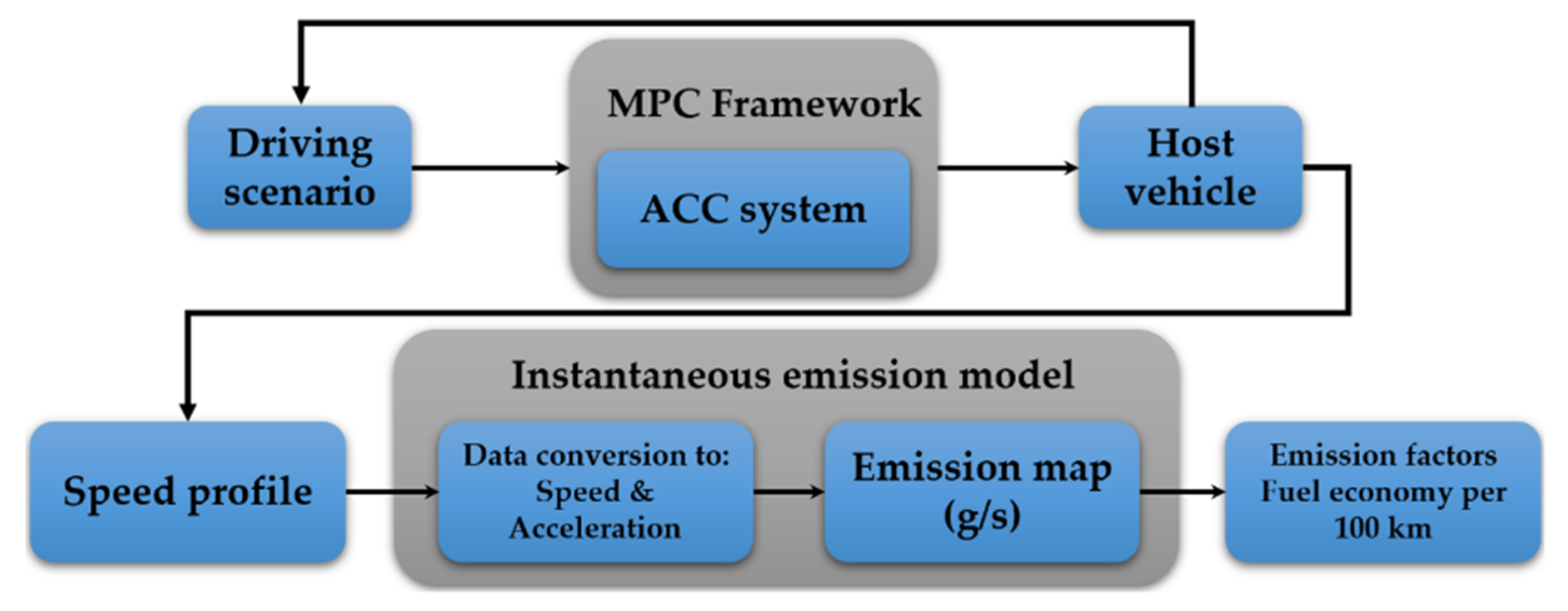
2.4. Emission and Fuel Consumption Model Development
2.5. Simulation Environment
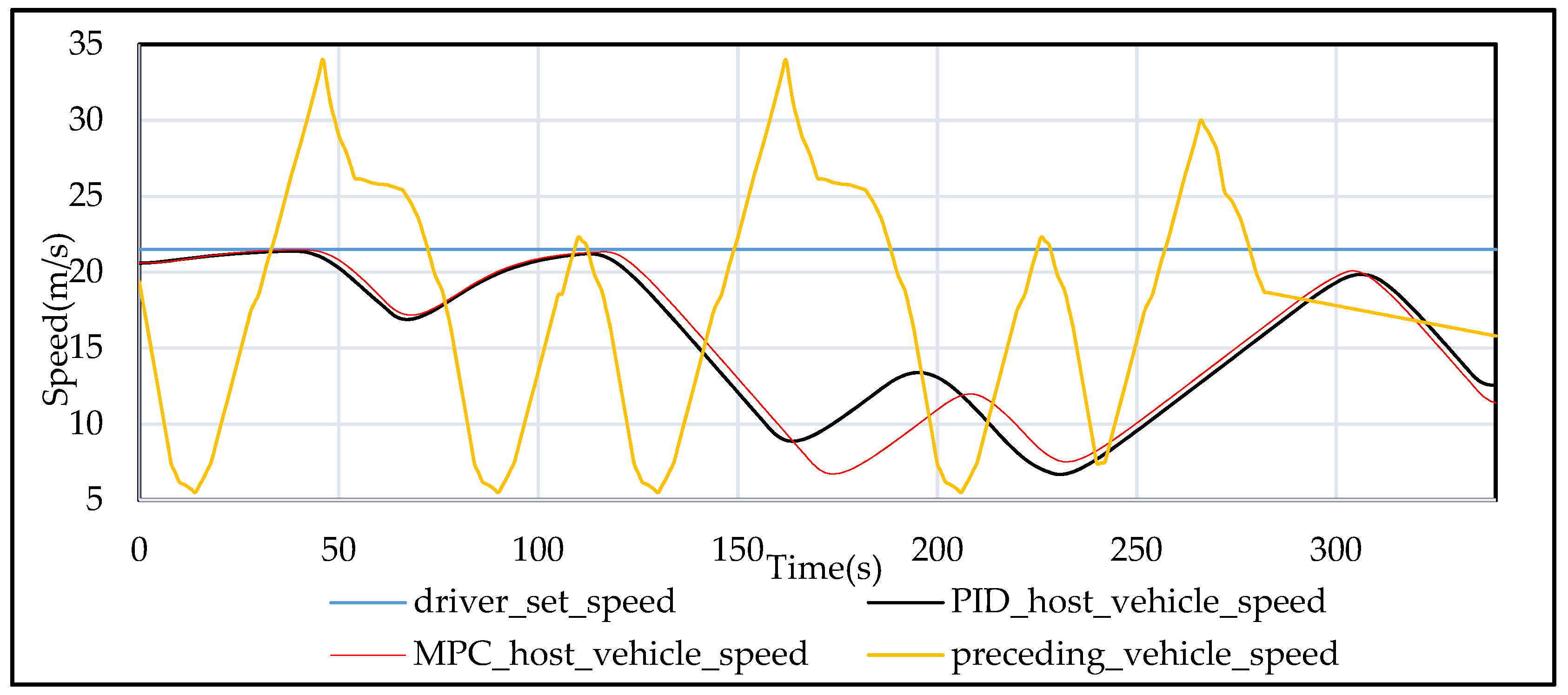
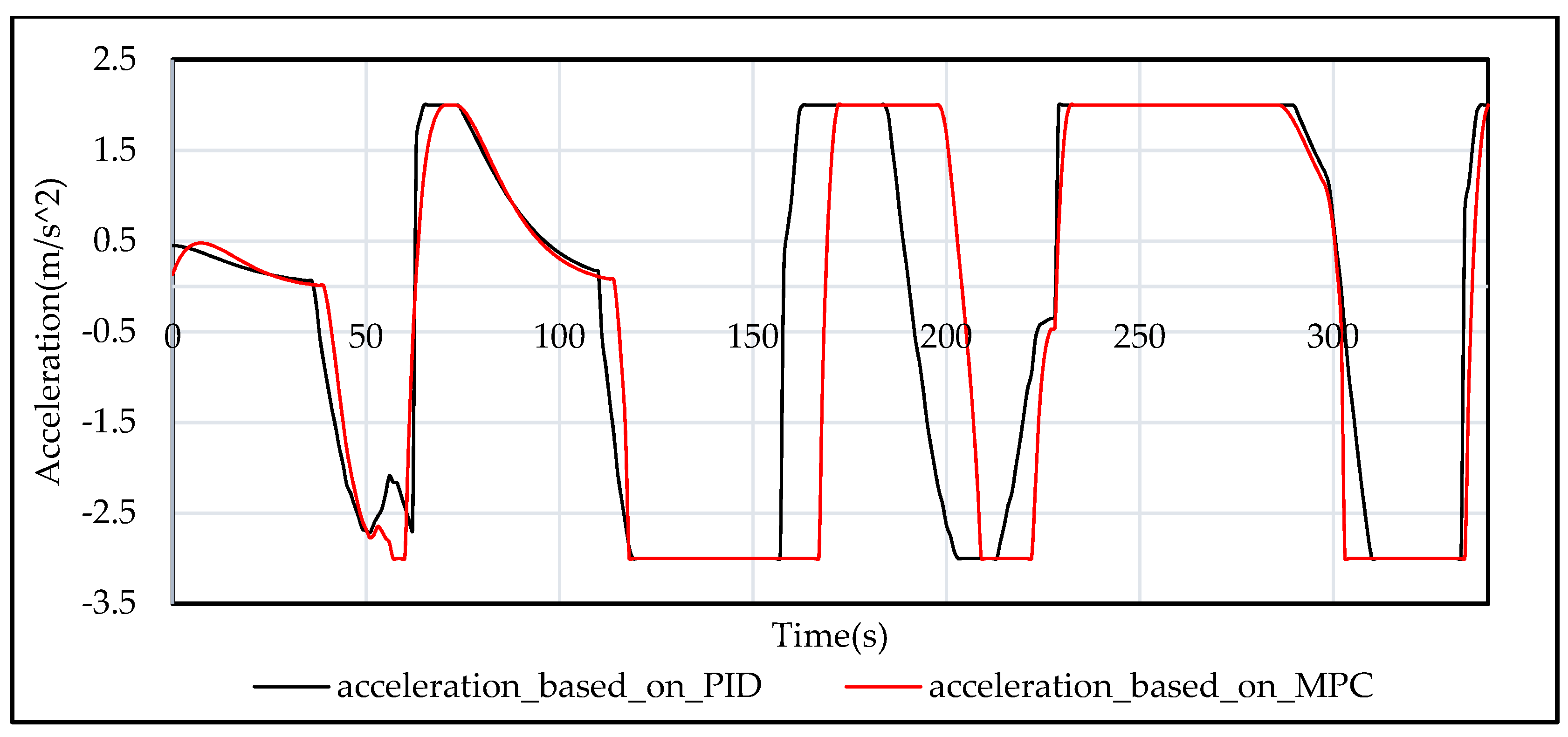
3. Results and Discussion
- Scenario 1: Following a preceding vehicle with varying speed;
- Scenario 2: Following the changing preceding vehicles with a cut in and cut out behaviors.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhou, M.; Jin, H.; Wang, W. A review of vehicle fuel consumption models to evaluate eco-driving and eco-routing. Transp. Res. Part D Transp. Environ. 2016, 49, 203–218. [Google Scholar] [CrossRef]
- Saboohi, Y.; Farzeneh, H. Model for optimizing energy efficiency through controlling speed and gear ratio. Energy Effic. 2008, 1, 65–76. [Google Scholar] [CrossRef]
- Wang, Y.; Boggio-Marzet, A. Evaluation of Eco-Driving Training for Fuel Efficiency and Emissions Reduction According to Road Type. Sustainability 2018, 10, 3891. [Google Scholar] [CrossRef]
- Farzeneh, H.; Saboohi, Y. Evaluation of the optimal performance of passenger vehicle by integrated energy-environment-economic modeling. Int. J. Environ. Sci. Technol. 2007, 4, 189–196. [Google Scholar] [CrossRef][Green Version]
- Kim, Y.; Lee, I.; Kang, S. Eco Assist Techniques through Real-time Monitoring of BEV Energy Usage Efficiency. Sensors 2015, 15, 14946–14959. [Google Scholar] [CrossRef] [PubMed]
- Jiménez, F.; Cabrera-Montiel, W.; Tapia-Fernández, S. System for Road Vehicle Energy Optimization Using Real Time Road and Traffic Information. Energies 2014, 7, 3576–3598. [Google Scholar] [CrossRef]
- Farzeneh, H.; Saboohi, Y. Software of passenger vehicle optimal work and energy recovery (POWER). Proceedings of Urban Transport XII: Urban Transport and the environment in the 21st Century, Prague, Czech Republic, 12–14 July 2006; Available online: https://www.researchgate.net/publication/271450637_Software_of_passenger_vehicle_optimal_work_and_energy_recovery_POWER (accessed on 2 June 2020).
- Ivens, T.; Spronkmans, S.; Roşca, B.; Wilkins, S. Model-Based Eco-Driving and Integrated Powertrain Control for (Hybrid) Electric Vehicles. World Electr. Veh. J. 2013, 6, 336–344. [Google Scholar] [CrossRef]
- Farzaneh, H.; Saboohi, Y. Model for analysis of energy flow from tank-to-wheel in a passenger vehicle. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 7–9 September 2005. [Google Scholar]
- Gilbert, E.G. Vehicle cruise: Improved fuel economy by periodic control. Automatica 1976, 12, 159–166. [Google Scholar] [CrossRef]
- Chang, D.J.; Morlok, E.K. Vehicle Speed Profiles to Minimize Work and Fuel Consumption. J. Transp. Eng. 2005, 131, 173–182. [Google Scholar] [CrossRef]
- Schwarzkopf, A.; Leipnik, R. Control of highway vehicles for minimum fuel consumption over varying terrain. Transp. Res. 1977, 11, 279–286. [Google Scholar] [CrossRef]
- Manzie, C.; Watson, H.; Halgamuge, S.K. Fuel economy improvements for urban driving: Hybrid vs. intelligent vehicles. Transp. Res. Part C Emerg. Technol. 2007, 15, 1–16. [Google Scholar] [CrossRef]
- Khout, N.; Borrelli, F.; Hedrick, K. Intelligent traffic data and model predictive control to improve fuel economy. In Proceedings of the 12th IFAC Symposium on Control in Transportation Systems, Redondo Beach, CA, USA, 2–4 September 2009; Volume 42, pp. 155–160. [Google Scholar]
- Saboohi, Y.; Farzeneh, H. Model for developing an eco-driving strategy of a passenger vehicle based on the least fuel consumption. Appl. Energy 2009, 86, 1925–1932. [Google Scholar] [CrossRef]
- Ichihara, T.; Kumano, S.; Yamaguchi, D.; Sato, Y.; Suda, Y. Driver assistance system for eco-driving. In Proceedings of the 16th International Transport Systems World Congress, Stockholm, Sweden, 21–25 September 2009. [Google Scholar]
- Jenness, J.W.; Lerner, N.D.; Mazor, S.; Osberg, J.S.; Tefft, B.C. Use of Advanced In-Vehicle Technology By Young and Older Early Adopters Survey Results on Navigation Systems. Traffic Saf. 2008, 810, 917. [Google Scholar]
- Abdullah, R.; Hussain, A.; Warwick, K.; Zayed, A. Autonomous intelligent cruise control using a novel multiple-controller framework incorporating fuzzy-logic-based switching and tuning. Neurocomputing 2008, 71, 2727–2741. [Google Scholar] [CrossRef]
- Ganji, B.; Kouzani, A.Z.; Khoo, S.Y.; Shams-Zahraei, M. Adaptive cruise control of a HEV using sliding mode control. Expert Syst. Appl. 2014, 41, 607–615. [Google Scholar] [CrossRef]
- Desjardins, C.; Chaib-Draa, B. Cooperative Adaptive Cruise Control: A Reinforcement Learning Approach. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1248–1260. [Google Scholar] [CrossRef]
- Kamal, A.S.; Mukai, M.; Murata, J.; Kawabe, T. Model Predictive Control of Vehicles on Urban Roads for Improved Fuel Economy. IEEE Trans. Control Syst. Technol. 2012, 21, 831–841. [Google Scholar] [CrossRef]
- Martin, T.; Arne, K. Traffic Flow Dynamics: Data, Models and Simulation; Springer: Berlin, Germany, 2013. [Google Scholar] [CrossRef]
- Corona, D.; Lazar, M.; De Schutter, B. A hybrid MPC approach to the design of a Smart adaptive cruise controller. In Proceedings of the IEEE International Symposium on Computer Aided Control System Design, San Francisco, CA, USA, 13–15 April 2009. [Google Scholar]
- Naus, G.; Ploeg, J.; Van De Molengraft, R.; Steinbuch, M. Explicit MPC design and performance-based tuning of an Adaptive Cruise Control Stop-&-Go. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 434–439. [Google Scholar] [CrossRef]
- Dang, R.N.; Chaoche, H.; Zhang, K.Q. ACC of electric vehicle with coordination control of fuel economy and tracking safety. Proceeding of the 2012 IEEE Intelligent Vehicles Symposium, Alcala de Henares, Spain, 3–7 June 2012; Available online: https://ieeexplore.ieee.org/abstract/document/6232121 (accessed on 8 June 2020).
- Gillespie, T.D. Fundamentals of vehicle dynamics; SAE Int.: Warrendale, PA, US., 1992; pp. 8–20. [Google Scholar]
- Rajamani, R.; Zhu, C. Semi-autonomous adaptive cruise control systems. IEEE Trans. Veh. Technol. 2002, 51, 1186–1192. [Google Scholar] [CrossRef]
- Bageshwar, V.; Garrard, W.; Rajamani, R. Model Predictive Control of Transitional Maneuvers for Adaptive Cruise Control Vehicles. IEEE Trans. Veh. Technol. 2004, 53, 1573–1585. [Google Scholar] [CrossRef]
- Zhou, J.; Peng, H. Range Policy of Adaptive Cruise Control Vehicles for Improved Flow Stability and String Stability. IEEE Trans. Intell. Transp. Syst. 2005, 6, 229–237. [Google Scholar] [CrossRef]
- Sheng, Z.; Xiangtao, Z. Model-predictive for pure electric vehicle during a vehicle-following process. Math. Probl. Eng. 2019, 2019, 15. [Google Scholar]
- Martines, J.J.; Canudas-de-Wit, C. A safe longitudinal control for adaptive cruise control and stop-and-go scenarios. IEEE Trans. Control Syst. Technol. 2007, 15, 246–258. [Google Scholar] [CrossRef]
- Luo, L.-H.; Liu, H.; Li, P.; Wang, H. Model predictive control for adaptive cruise control with multi-objectives: Comfort, fuel-economy, safety and car-following. J. Zhejiang Univ. A 2010, 11, 191–201. [Google Scholar] [CrossRef]
- Moon, S.; Yi, K. Human driving data-based design of a vehicle adaptive cruise control algorithm. Veh. Syst. Dyn. 2008, 46, 661–690. [Google Scholar] [CrossRef]
- Sun, N.; Yang, T.; Fang, Y.; Wu, Y.; Chen, H. Transportation Control of Double-Pendulum Cranes With a Nonlinear Quasi-PID Scheme: Design and Experiments. IEEE Trans. Syst. Man. Cybern. Syst. 2019, 49, 1408–1418. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University: New York, NY, USA, 2004; pp. 561–562. [Google Scholar]
- Joumard, R.; Jost, P.; Hickman, J.; Hassel, D. Hot passenger car emissions modelling as a function of instantaneous speed and acceleration. Sci. Total Environ. 1995, 169, 167–174. [Google Scholar] [CrossRef]
- Sturm, P.; Almbauer, R.; Sudy, C.; Pucher, K. Application of Computational Methods for the Determination of Traffic Emissions. J. Air Waste Manag. Assoc. 1997, 47, 1204–1210. [Google Scholar] [CrossRef]
- Boulter, P.G.; McCrae, L.S.; Barlow, T.J. A Review of Instantaneous Emission Models for Road Vehicles; TRL Limited: Wokingham, UK, 2006. [Google Scholar]
- Argonne National Library. Energy System Division: Downloadable Dynamometer Database; Argonne National Library: Lemont, IL, USA, 2015. Available online: https://www.anl.gov/es/downloadable-dynamometer-database (accessed on 20 March 2015).
- Güvenç, L.; Uygan, I.M.C.; Kahraman, K.; Karaahmetoglu, R.; Altay, I.; Senturk, M.; Emirler, M.T.; Karci, A.E.H.; Güvenç, B.A.; Altuğ, E.; et al. Cooperative Adaptive Cruise Control Implementation of Team Mekar at the Grand Cooperative Driving Challenge. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1062–1074. [Google Scholar] [CrossRef]
- Nieuwenhuijze, M.R.I.; Van Keulen, T.; Oncu, S.; Bonsen, B.; Nijmeijer, H. Cooperative Driving With a Heavy-Duty Truck in Mixed Traffic: Experimental Results. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1026–1032. [Google Scholar] [CrossRef]
- Naranjo, J.; Gonzalez, C.; Reviejo, J.; Garcia, R.; De Pedro, T. Adaptive fuzzy control for inter-vehicle gap keeping. IEEE Trans. Intell. Transp. Syst. 2003, 4, 132–142. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Values | Units | Symbol | Values | Units |
|---|---|---|---|---|---|
| ,,, | |||||
| 1 | |||||
| 0.5 | 0.2 | ||||
| 0.4 | 2 | ||||
| 0.2 |
| PID-based ACC | 1.40 | 4.36 | 434.60 | 3.48 |
| MPC-based ACC | 1.30 | 4.18 | 429.80 | 3.34 |
| Improvement (%) | 7.14 | 4.12 | 1.10 | 4.02 |
| PID-based ACC | 1.41 | 4.65 | 364.83 | 3.26 |
| MPC-based ACC | 1.15 | 3.86 | 308.81 | 2.88 |
| Improvement (%) | 18.70 | 16.99 | 15.35 | 11.65 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nie, Z.; Farzaneh, H. Adaptive Cruise Control for Eco-Driving Based on Model Predictive Control Algorithm. Appl. Sci. 2020, 10, 5271. https://doi.org/10.3390/app10155271
Nie Z, Farzaneh H. Adaptive Cruise Control for Eco-Driving Based on Model Predictive Control Algorithm. Applied Sciences. 2020; 10(15):5271. https://doi.org/10.3390/app10155271
Chicago/Turabian StyleNie, Zifei, and Hooman Farzaneh. 2020. "Adaptive Cruise Control for Eco-Driving Based on Model Predictive Control Algorithm" Applied Sciences 10, no. 15: 5271. https://doi.org/10.3390/app10155271
APA StyleNie, Z., & Farzaneh, H. (2020). Adaptive Cruise Control for Eco-Driving Based on Model Predictive Control Algorithm. Applied Sciences, 10(15), 5271. https://doi.org/10.3390/app10155271