4.2. Correlation and Array Gain in the Direct-Arrival Zone
We collect the acoustic signal data received by the vertical hydrophone line array when the sound source is placed at a depth of 30 m and the horizontal range of 2.4 km. A segment of signal for 30 s is intercepted from the early of the received signal and filtered by a band-pass filter with a frequency range of 300–400 Hz. Therefore, the SNR near the signal frequency is increased. The top element is regarded as the reference element in the following discussion.
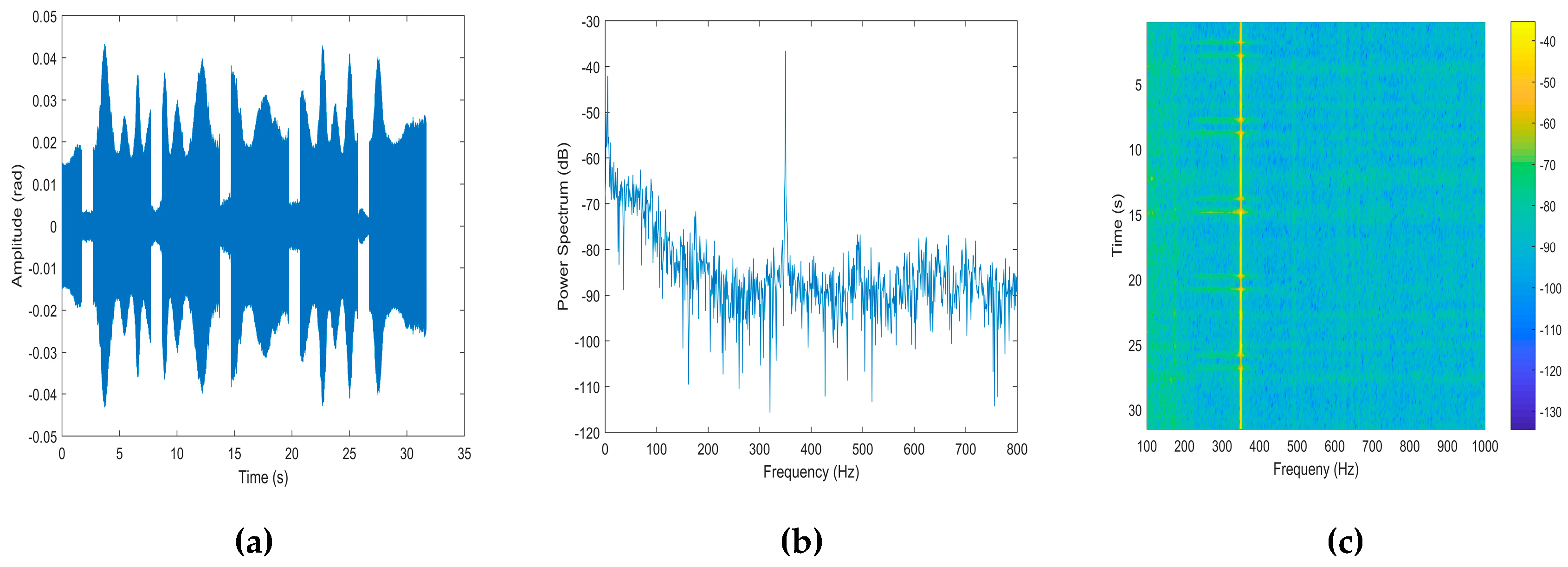
Figure 5 shows waveforms of the signal received by the reference element in the time domain, frequency domain, and time-frequency domain. In
Figure 5a, because of the high SNR it is obvious to view the pulse shape of the received signal and the reception gap between the two 5-second signals.
Figure 5b,c display the signal frequency steadily.
In order to estimate the elevation angle of the sound source, conventional beamforming technology is applied to process the receiving data above. After the time compensation processing, the power output of each beam is shown in
Figure 6. The 0° of the elevation angle corresponds to the direction along the vertical array axis and toward the sea surface.
As seen in
Figure 6, there are two distinct bright columns at 78° and 133°, respectively. According to the experiment setup, the direction of the received direct-arrival wave is downward. Hence, the real elevation angle of the acoustic source is 78°, and the other power peak of 133° is corresponding to the grating lobe due to
. The explanation for the grating lobe is validated through the simulation in
Figure 7, in which the element number of the line array is 16, and the element interval is 5 m. The simulation frequency is 350 Hz, and the elevation angle of the sound source is set to 78°. It is indicated that the grating lobe appears at the elevation angle of 133°, which is consistent with the experimental result.
As shown in
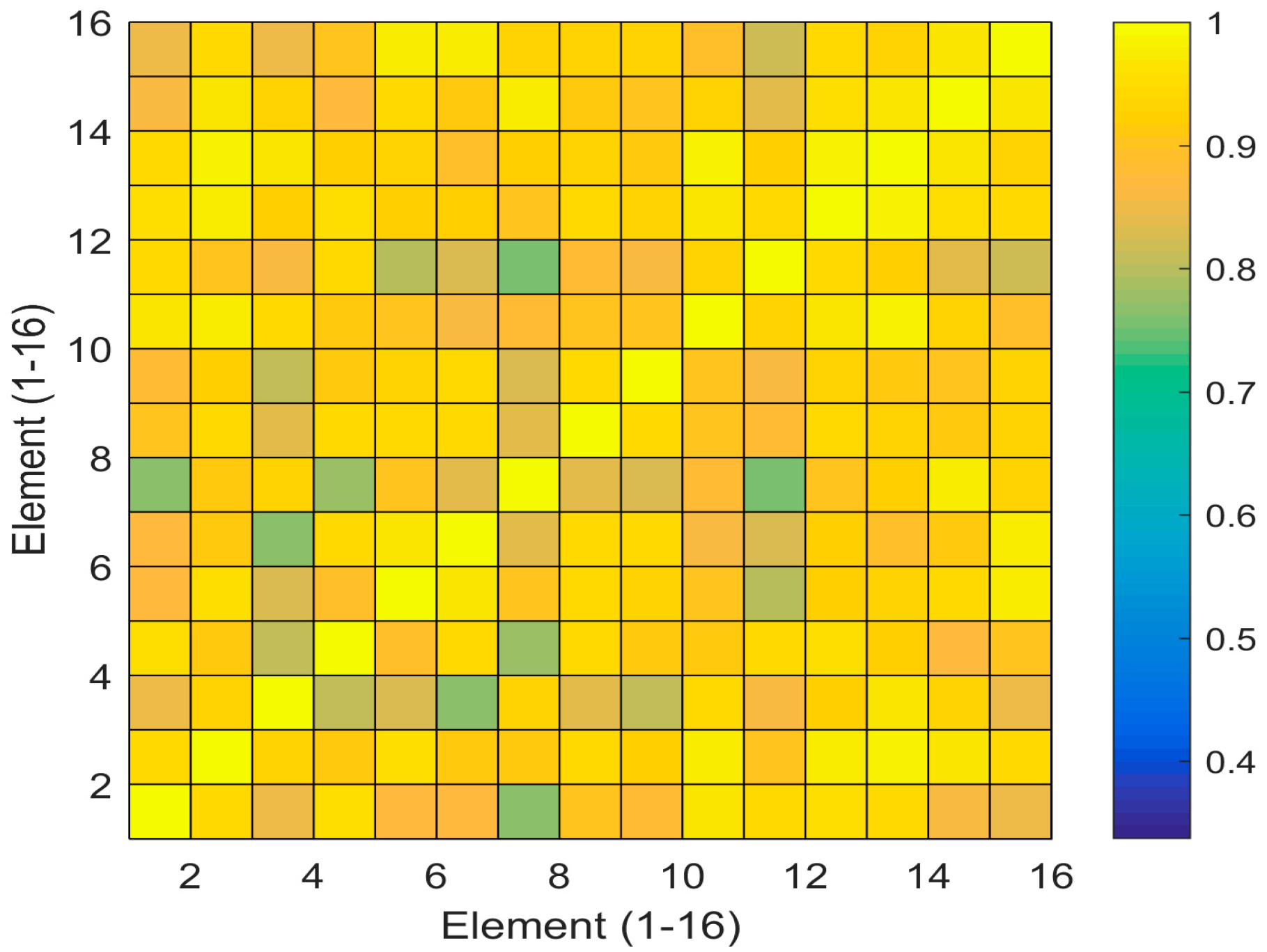
Section 2, the correlation coefficient of the received signal describes its similarity. Generally speaking, in an unbounded homogeneous medium, the signal from the sound source propagates freely without distortion, and hence, the signal between arbitrary receiving points are completely correlated. However, in the real marine environment, multipath propagation and sound scattering cause the waveform distortion, which results in a decrease of signal correlation. The correlation coefficients of the signal received by the array are calculated and presented in
Figure 8. Each square stands for the signal correlation between the element and the reference element. We can see that the value of correlation coefficients slightly descend with the increase of element spacing, but the majority are still higher than 0.7. Also, the correlation coefficients between adjacent elements are nearly equal to 1.
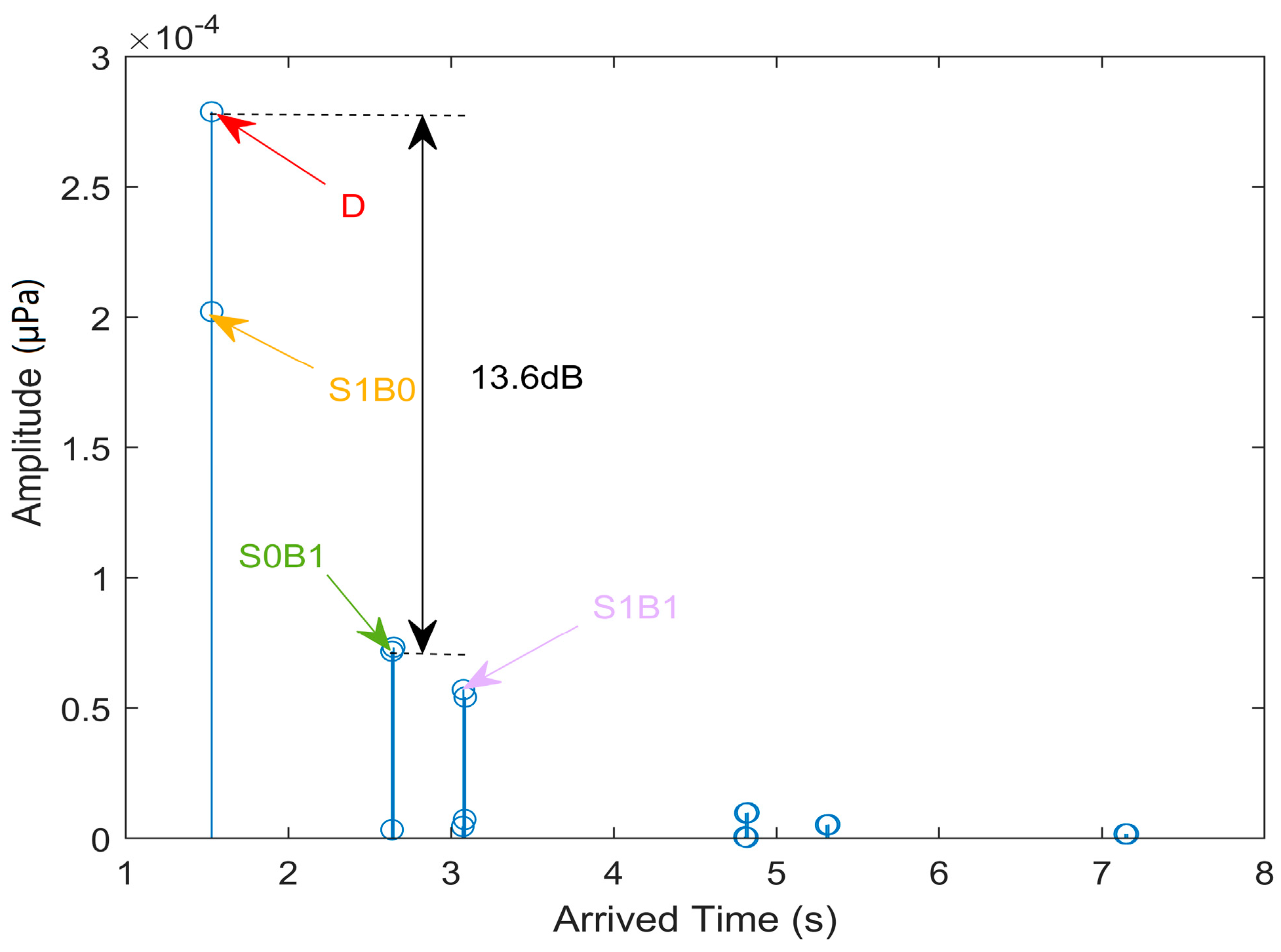
The ray acoustics can better reflect the propagation characteristics of sound waves in the deep sea. In the direct-arrival zone, the high vertical correlation of the acoustic field could be explained by BELLHOP model, which can calculate the time arrival structure, ray trace, and sound intensity in the marine environment. Since the sound source is near the sea, and the array length is a small amount relative to the horizontal range, the receiving structure of the topmost element is not much different from the bottommost element. Substituting the measured SSP into the BELLHOP model, we calculate the time arrival structure of the eigen-rays received by the reference hydrophone in
Figure 9. The source depth and receiving range are the same as the actual sea trial conditions. It is apparent that the direct ray (D) and the once-surface-reflected ray (S1B0) are the main components of the sound field, whose energy is higher than other rays. For example, taking the amplitude of the D wave as the reference standard, we find that the amplitudes of the once-bottom-bounce ray (S0B1), and once-surface-reflected and once-bottom-reflected ray (S1B1) are nearly 13.6 dB lower than D wave as the form of dB. This finding occurs mainly because the sound wave incident to the ocean bottom at larger grazing angles will suffer more severe reflection attenuation. As a consequence, the acoustic field in the direct-arrival zone is dominated by D wave and S1B0 wave.
To further explain the high correlation,
Table 1 lists the arrival time and elevation angle of D wave and S1B0 wave for the reference element. From the table, we can see that the amplitude difference between D wave and S1B0 wave is about 7.6 × 10
−5 μPa, namely 2.78 dB, and the arrival time and arrival angles between these two ray components are nearly equal to each other. This phenomenon is similar to other elements.
Ray trace clearly reflects the propagation path of sound energy so that the sound field distribution can be qualitatively interpreted. According to the calculation results above, the ray trace of D wave and S1B0 wave received by the reference element are presented in
Figure 10. The abscissa represents the horizontal range from the sound source to the receiver. We can see that these two waves propagate almost along the same path and have nearly the same receiving amplitude, arrival time, and arrival angle, which makes their coherent superposition.
Ray theory can quantitatively analyze the high vertical correlation of sound field. In the direct-arrival zone, we only consider the D wave and S1B0 wave, and other ray components can be ignored.
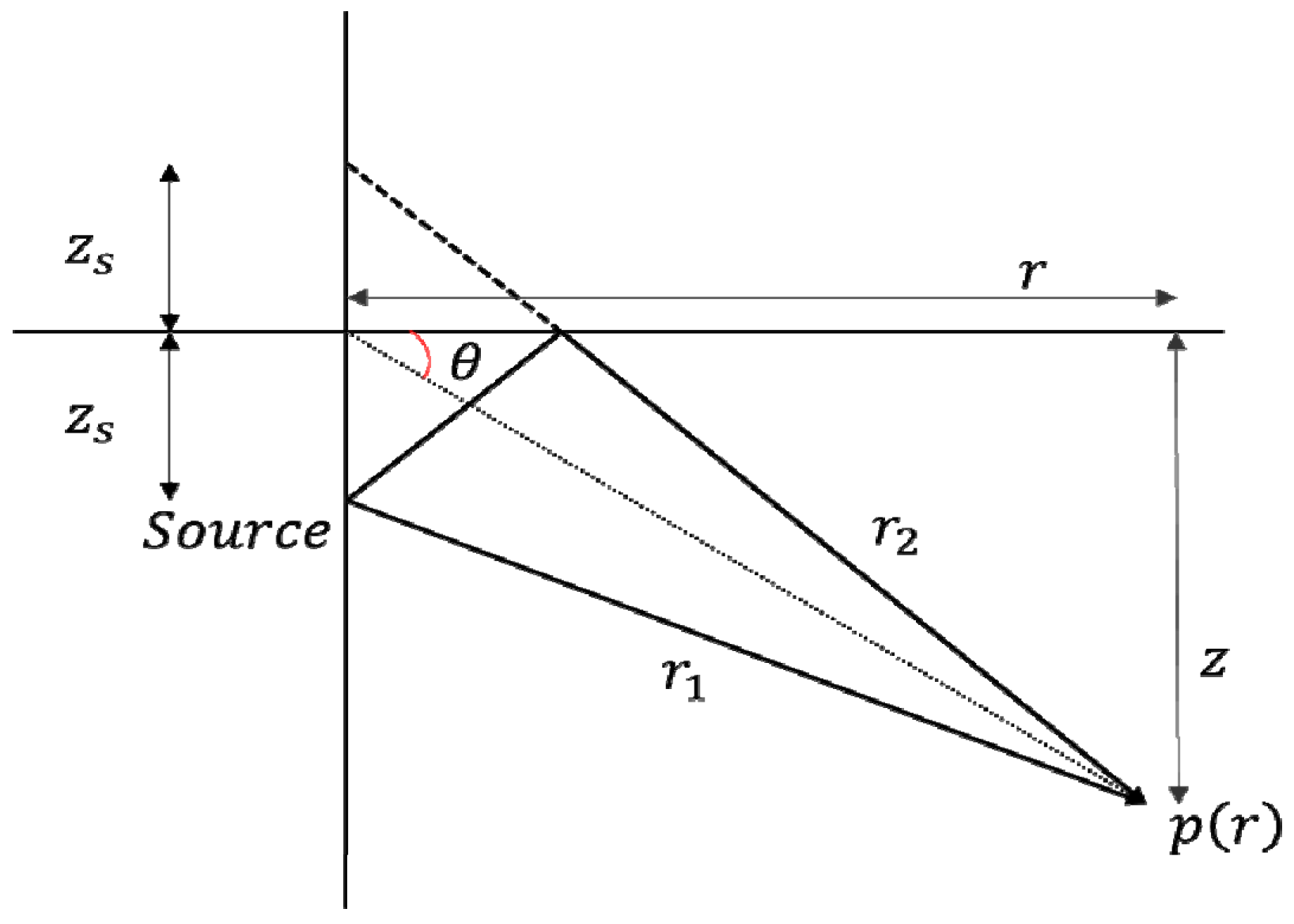
Figure 11 displays the interference schematic diagram of two rays. We assume that the environment is range independent, the sound speed between the source and receiver is a constant, and the sea surface is absolutely soft. Thus, the sound rays travel along a straight line and are perfectly reflected by the sea surface. The signal received is the superposition of D wave and S1B0 wave, which can be written as [
20].
where
and
are propagation ranges of the D wave and S1B0 wave, respectively,
and
are the corresponding propagation time. According to
Figure 11, propagation distance of two sound rays is calculated by
where
represents the horizontal range from sound source to receiver,
and
denote the receiver depth and the source depth, respectively. The distance
is defined as the linear distance from coordinate origin to receiving point, which satisfies the equation
. Considering that
, Equation (22) can be simplified as
where
is the angle between the line of the source to the receiving point and the horizontal line. Based on Equation (23), the propagation ranges of D wave and S1B0 wave are nearly equal to each other. Next, we define the propagation time difference between D wave and S1B0 wave as
Substituting Equations (23) and (24) into (21), the received signal can be expressed as
Similarly, the signal received by another sensor in the same range can be written as
where
and
are numerically equal, and both represent the horizontal range of point A. Substituting Equations (25) and (26) into (8) and combined with
, the correlation coefficients of signal after simplification are given by
Based on the experiment setup, the position of source and receivers are specific, in other words,
,
, and
are specific. The real part of
is approximately equal to the maximum 1 by adjusting time delay
. As a consequence, the value of correlation coefficient
is only determined by
and
. When considering the single frequency signal, Equation (27) can be written as
After further simplification, the correlation coefficient is
In the direct-arrival zone, when the source is near the surface, the arrival time of D wave and S1B0 wave at any hydrophones almost have no difference, namely
and a high value of
can be obtained.
Figure 12 shows the theoretical calculation result and experiment result. It is indicated that the trend of the correlation coefficient with the element depth is similar, but Equation (27) only considers the D wave and S1B0 wave which mainly contribute to the sound field. The real received signal also contains the sound energy of other paths, thus, the two curves show difference. The same interpretation method can be extended to non-isosonic profile.
The noise correlation is another significant factor in the evaluation of AG. Generally speaking, because of the high SNR, it is difficult to separate the signal and noise when receiving data. Furthermore, the ambient noise is not expected to change during a short time. Hence, the data received before the signal transmission is regarded as the noise. We measured the actual marine environmental noise to do the next analysis.
Figure 13 shows the noise correlation coefficients corresponding to different element interval-to-wavelength ratio. The blue line, red line, and yellow line in
Figure 13 denote the measured ambient noise, the isotropic noise model, and the surface noise model. It is indicated that the noise correlation coefficient in the real ocean is higher than those of the two theoretical noise models, although there exists a similar trend. Also, from
Figure 13 we reveal that the correlation coefficient of measured noise is 0.2 at the frequency of 350 Hz as shown in purple round, basically close to that of surface noise. Next, the actual noise correlation coefficient of the array is discussed as follows.
Further, the correlation coefficients of noise are calculated by Equation (7) and shown in
Figure 14, where the correlation coefficient of the noise received by two adjacent elements is slightly higher than zero. Moreover, as the receiver depth increases, the noise correlation coefficient decreases. In other words, the noise received at different depths is largely uncorrelated to each other.
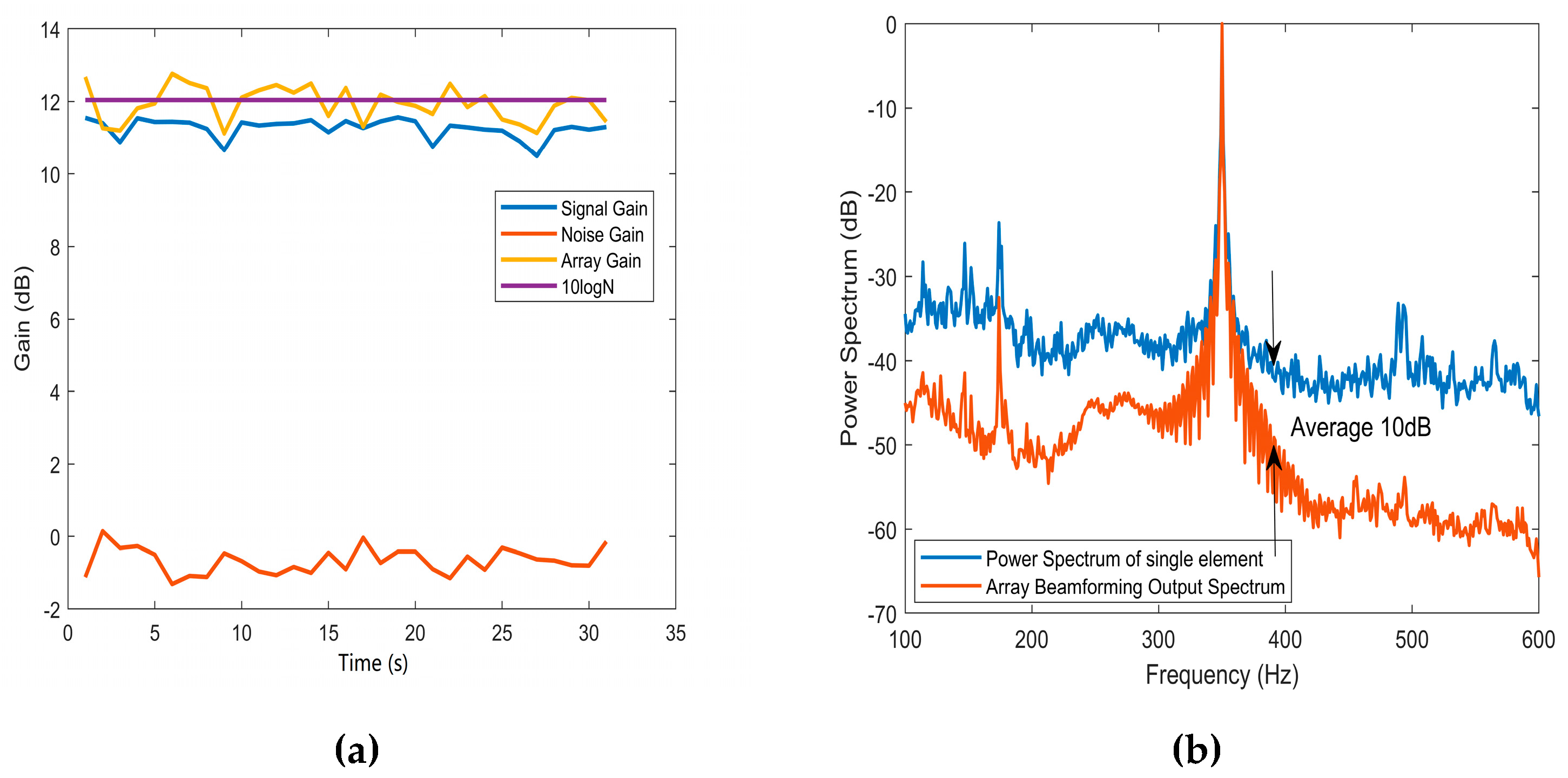
According to the correlation coefficient of signal and noise above, the signal gain, noise gain, and array gain are estimated. In
Figure 15a, the blue line, red line, and yellow line represent SG, NG, and AG, respectively. It is manifested that the curve of SG fluctuates around 11 dB and the value of NG ranges from −1 dB to 0 dB. The value of AG fluctuates around the ideal value of 12 dB, and the average value of AG is about 11.9 dB. It is noteworthy that the value of AG exceeds the ideal value of
during the time of 5 s to 8 s. That is because SGs during these periods are very close to
, and the corresponding NGs are relatively stable and remain at a negative value.
For validating the AG analysis above, the beamforming output spectrum of the VLA and the power spectrum of a single element are compared and given in
Figure 15b. In order to intuitively display the difference between the two spectrums, we normalize the peak corresponding to the signal frequency and thus, the difference of two noise power spectrums among the whole frequency band is regarded as the AG after eliminating outliers. We can see that the average AG is about 10 dB, which is close to the calculation result of 11.9 dB in
Figure 15a. In the frequency band from 100 Hz to 200 Hz, there exist some small fluctuated peaks, which are caused by low-frequency environmental noise.
The experimental time for each measurement point is half an hour. To verify the effect of time changes on the array gain, we divide the half-hour measurement time into three segments and intercept 30-s signal from each division to calculate the array gain. Array gains of the early segment (1–10 min) have been discussed in
Figure 15b. Array gains in the middle (11–20 min) and late (21–30 min) period are shown in
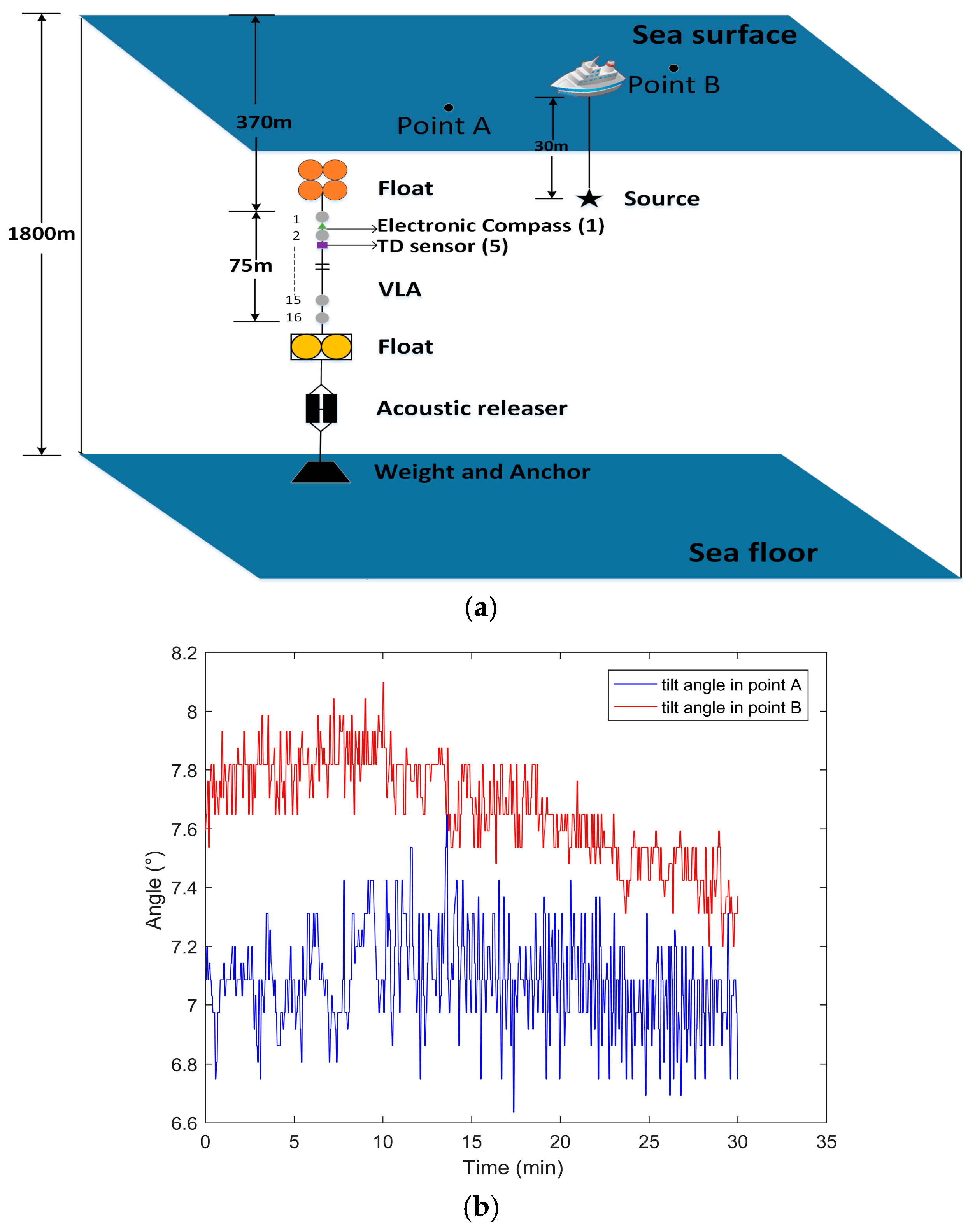
Figure 16. The average AG in the early, middle, and late period is 10 dB, 9 dB, and 9 dB, respectively. The little difference may be because the marine environment changed slightly during the entire measurement time. Moreover, the tilt angle of the array changed about 1° due to the disturbance of the ocean current (as shown in
Figure 3b). It can be concluded that the array gain remains constant basically throughout the measurement time.
In this subsection, we have discussed the correlation and AG in the direct-arrival zone and explained the reason for high value of AG from the perspective of sound rays. Next, the correlation and AG in the shadow zone are analyzed.
4.3. Correlation and Array Gain in the Shadow Zone
When the sound source is placed at a depth of 30 m and a horizontal range of 10.3 km, we collect the signal data received by the VLA. The acoustic field is now located in the shadow zone. 30-s samples of the signal are selected and filtered by a band-pass filter with a frequency range of 300–400 Hz in this processing. The top element is still considered as the reference element. The signal received by the reference element in the time domain, frequency domain, and time-frequency domain is presented in
Figure 17, respectively. Because of the significant influence of multiple paths during the propagation of sound waves, pulse shape of the received signal in the time domain is not evident and arrival waves at the various time are mixed, as shown in
Figure 17a.
Similarly, the power output of the VLA is shown in
Figure 18 after the conventional beamforming processing. From
Figure 18, we can find that there exist two visible peaks appearing at 111° and 61°, respectively. According to the experiment configuration, the direction of the received wave is mainly upward in this range. Therefore, the elevation angle of the signal received by hydrophones is 111°, and the grazing lobe angle is 61°.
Following Equation (7), the correlation coefficients of the received signal are calculated and shown in
Figure 19. It is concluded that the correlation coefficients between two different hydrophones are lower than those in the direct-arrival zone in
Figure 8. Besides, correlation coefficients descend significantly as the vertical depths ascend and show periodic oscillation, as shown in
Figure 20. This phenomenon occurs mainly because, at long range, sound rays undergo multiple reflections between the sea surface and the bottom. Moreover, the difference in the arrival time of each ray increases and multi-path interference becomes complicated.
To analyze the ray type in the shadow zone, we use the BELLHOP model to calculate the time arrival structure of the eigen-rays received by the reference hydrophone. As shown in
Figure 21a, we can see that the acoustic field in the shadow zone is mainly composed of the once-bottom-bounce ray (S0B1), once-surface-reflected and once-bottom-reflected ray (S1B1), and the twice-surface-reflected and once-bottom-reflected ray (S2B1). It is concluded that the time arrival structure becomes more complicated than that in the direct-arrival zone because of multiple reflections of sound rays from the ocean surface and the ocean bottom. The amplitudes of three types of the ray are close, as presented in
Figure 21a. The ray traces of the S0B1 wave, S1B1 wave, and S2B1 wave received by the reference element are further shown in
Figure 21b, in which we can find that propagation traces between S1B1 wave with the blue line and S2B1 wave are close. Furthermore, the path of S1B1 wave with purple line and the one of S0B1 wave are also similar. However, there exist different propagation paths and distinct time-delay differences between the two groups, which complicates multi-path interference and reduces the vertical correlation of the sound field.
Table 2 shows the amplitudes, arrival time, and elevation angles information of S0B1 wave, S1B1 wave, and S2B1 wave, respectively. In this table, the positive and negative values of the arrival angle represent the downward and upward direction of the incident wave, respectively. Based on the different arrival time, we regard the S1B1 wave with negative angle and S0B1 wave as the first group, and S2B1 wave, S1B1 wave with positive angle as the second group. It is observed from
Figure 21a and
Table 2 that the first group has a larger amplitude than the second group and the arrival time is earlier. It is because the sound rays of second group incident to the bottom at a large grazing angle and reflection attenuation is severe. Thus, the arrival amplitude decreases accordingly. The second group experiences a longer path, and it arrives later. It is apparent that there is a time difference of nearly 0.15 s between these two groups.
Moreover, the amplitudes of two rays within each group are also different. For example, the amplitude of S1B1 is slightly higher than that of S0B1 because the paths do not entirely coincide. The received signals are a mixture of signal with different arrival angles and powers. In this case, when the signal received is compensated with a single time delay by conventional beamforming technology, signal correlation decreases, accordingly.
Further, we calculate the correlation coefficients of the received noise and show them in
Figure 22. The figure shows that noise correlation coefficients are nearly equal to 0 except diagonal elements, which means the received noise is almost uncorrelated for every two different sensors. Compared with the noise received in the direct-arrival zone, the noise correlation in the shadow zone is slightly lower. The reason is that when the array is in the shadow zone, the distance from the sound-source ship to the receivers is significantly further, and there is less ship noise received.
Then, the signal gain, noise gain, and array gain are calculated by the signal and noise correlation coefficients. As shown in
Figure 23a, the curve of SG fluctuates around 8 dB because of the weak signal correlation, and the value of NG is about 0 dB. The value of AG is nearly equal to that of SG and is about 4 dB lower than the ideal value of 12 dB. The reason for the lower AG is the time delays of each element cannot be compensated accurately by using only one single angle when the plane wave model is not satisfied. In order to verify the previous discussion, the beamforming output of the VLA and power spectrum of the single element are calculated and shown in
Figure 23b. Using the same normalization method as before, the SNR of beamforming output for the VLA is about 7 dB higher than that of the single element, which is very close to the average AG value of 8 dB.
We also intercept three 30-s signals to calculate the array gains. As shown in
Figure 24, the average AG in the middle and late segment is 6.5 dB and 5.5 dB, respectively. The marine environment changed with the time slightly, and the tilt angle of the array changed about 1°, which causes a little difference in the AG. We can consider that the AG remains constant basically during the measurement time.
Through the above analysis, it is found that the influence of the measurement time on the array gain can be ignored. Next we discuss the effect of ship auxiliary engine noise on the array gain.
The auxiliary engine of the ship was still working when the ship was stopped in the measurement points. At point A with the horizontal range of 2.4 km, the effect of the auxiliary noise on the marine environment noise cannot be ignored. At point B with 10.3 km, the auxiliary engine noise has a slight effect. We compare the noise correlation between two measurement points, as presented in
Figure 25. The noise at point B is basically uncorrelated, and the noise correlation coefficient at point A fluctuates around 0.2. Considering the whole experiment lasting for only two hours, so the changes in the marine environment caused by the time are negligible. The small difference in noise correlation is caused by the auxiliary engine.
According to
Figure 15a and
Figure 23a, the average noise gain of point A and point B is −0.678 dB and −0.302 dB, respectively, with a difference of only 0.376 dB. Therefore, we can conclude that the auxiliary engine noise has little effect on the array gain and can be ignored.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}