Effect of Haptic Feedback on Pilot/Operator Performance During Flight Simulation


Abstract
1. Introduction
- While the presence of accurately modeled haptic forces provides better control of a UAV, unrealistic or exaggerated forces may produce better handling of the aircraft.
- The role of haptic feedback in UAV handling varies for different phases of flight. In other words, a single force model may not produce better navigational control across all phases of flight.
2. Methodology
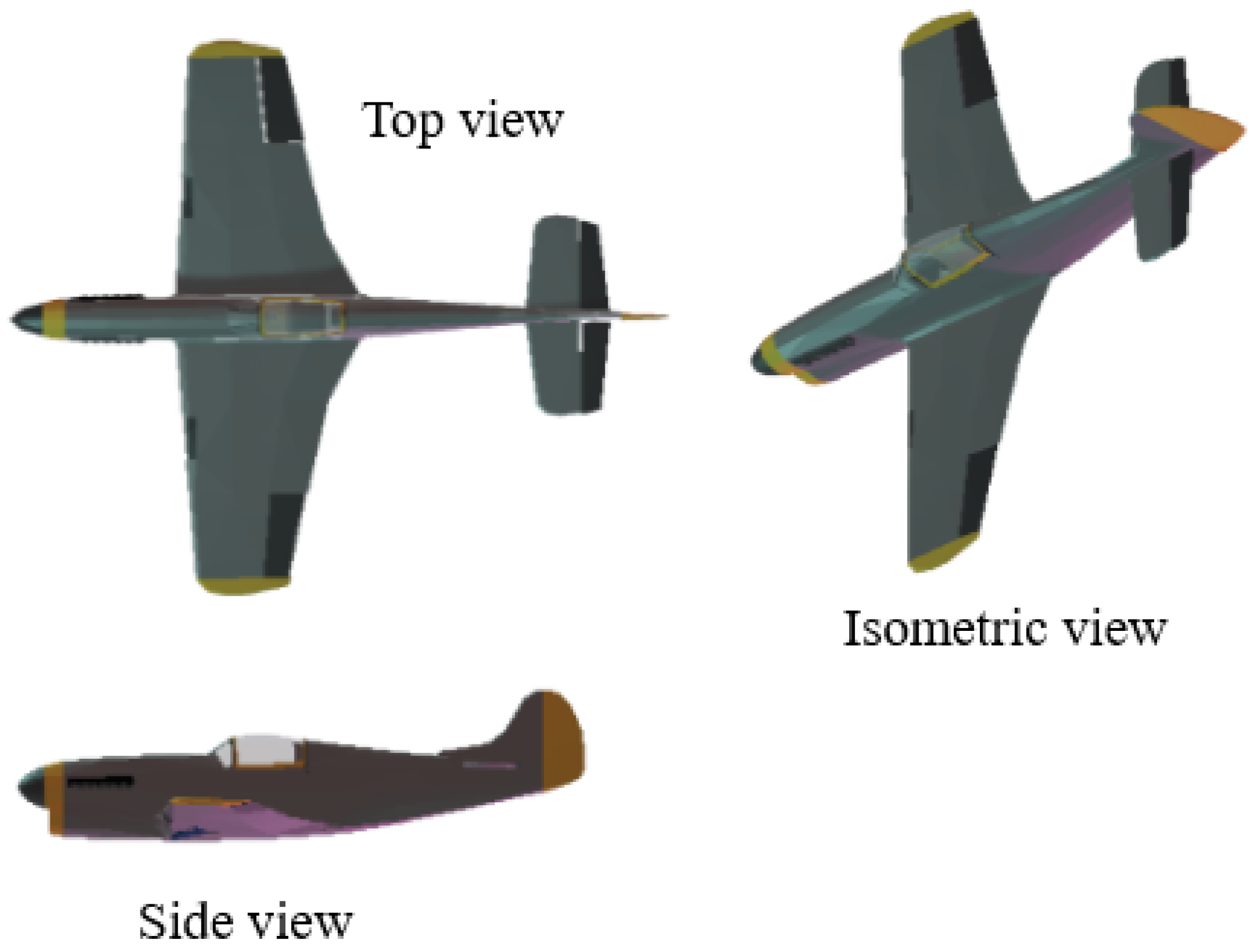
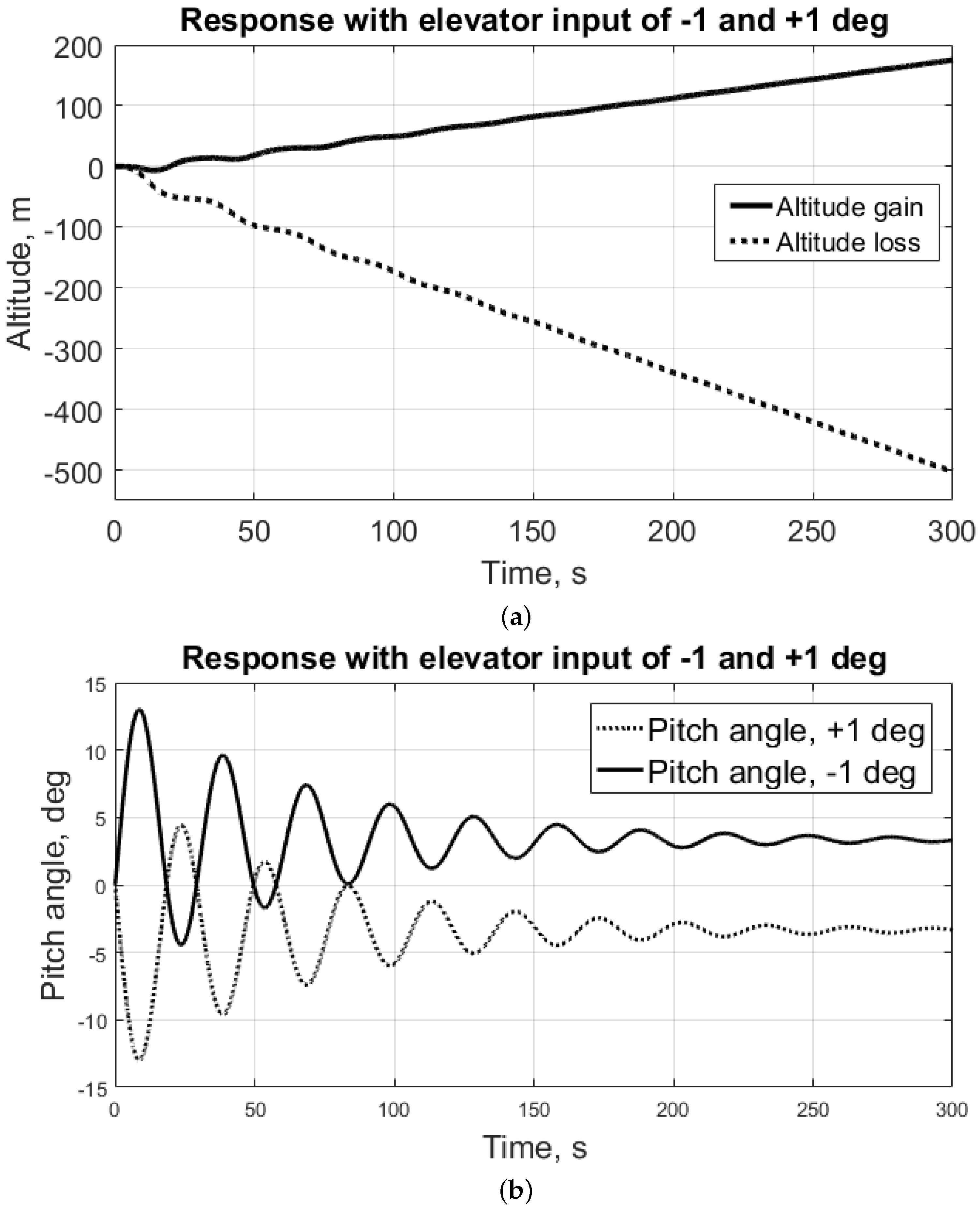
2.1. Aerodynamic Modeling of UAV
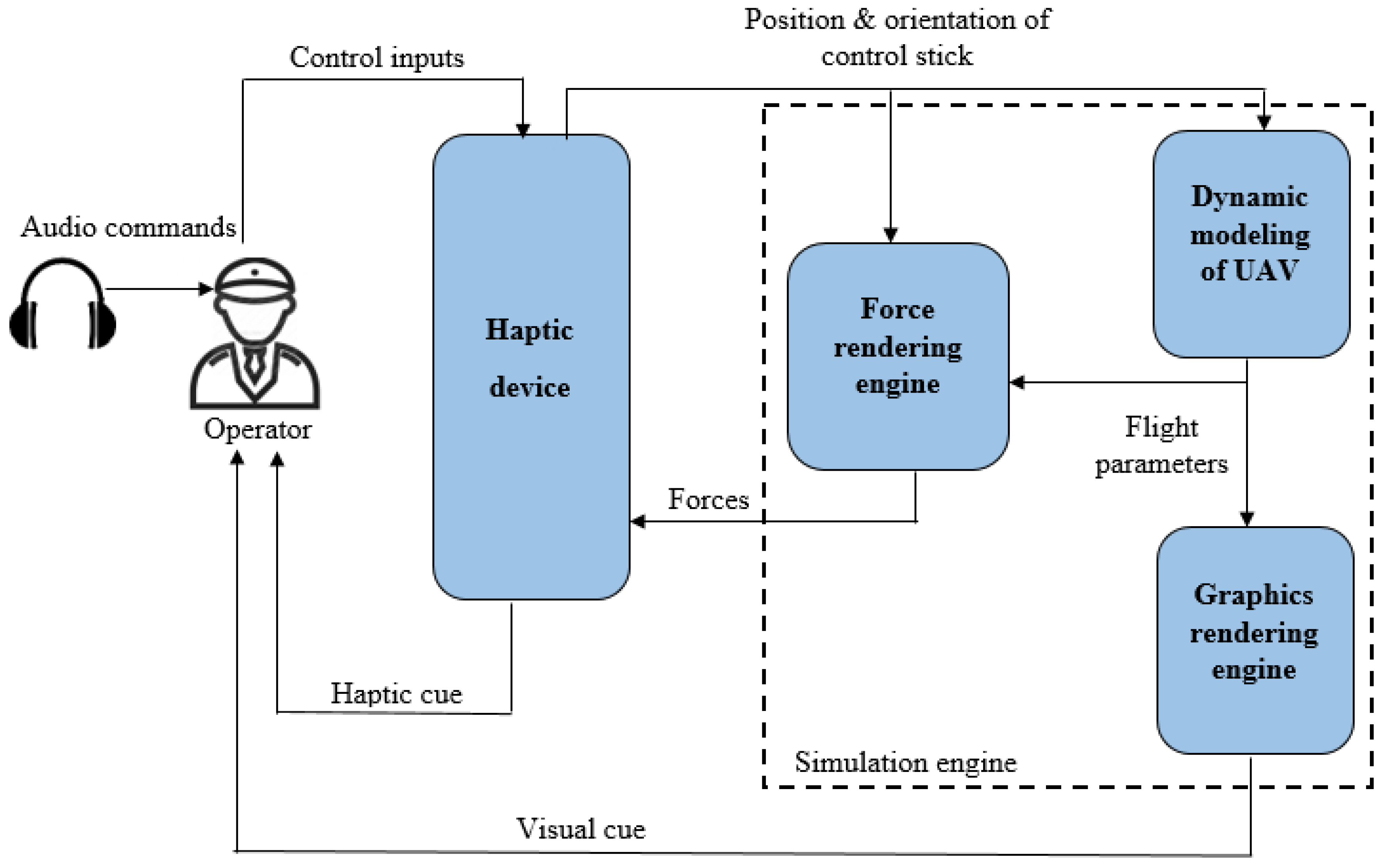
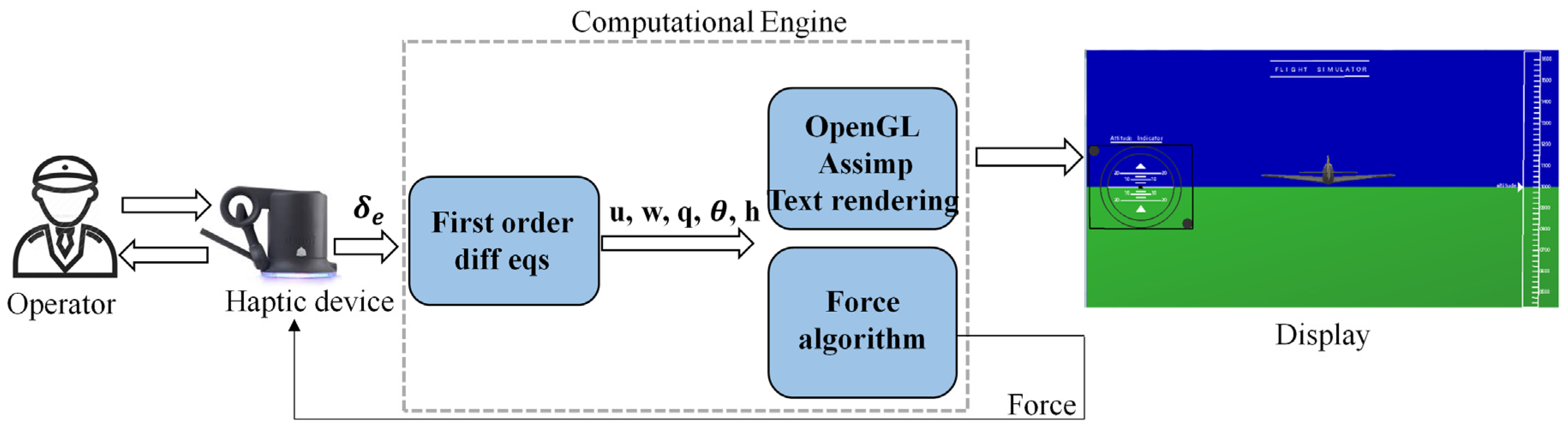
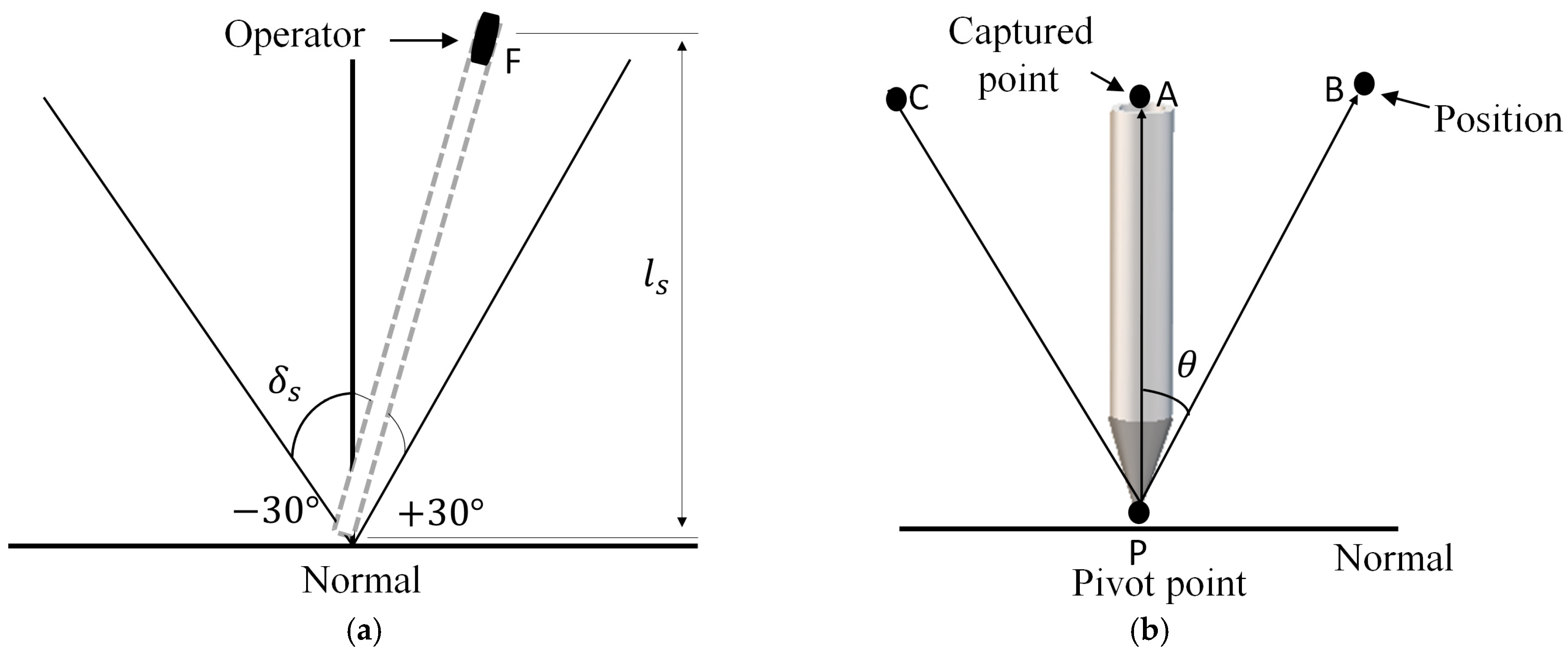
2.2. Haptic Rendering
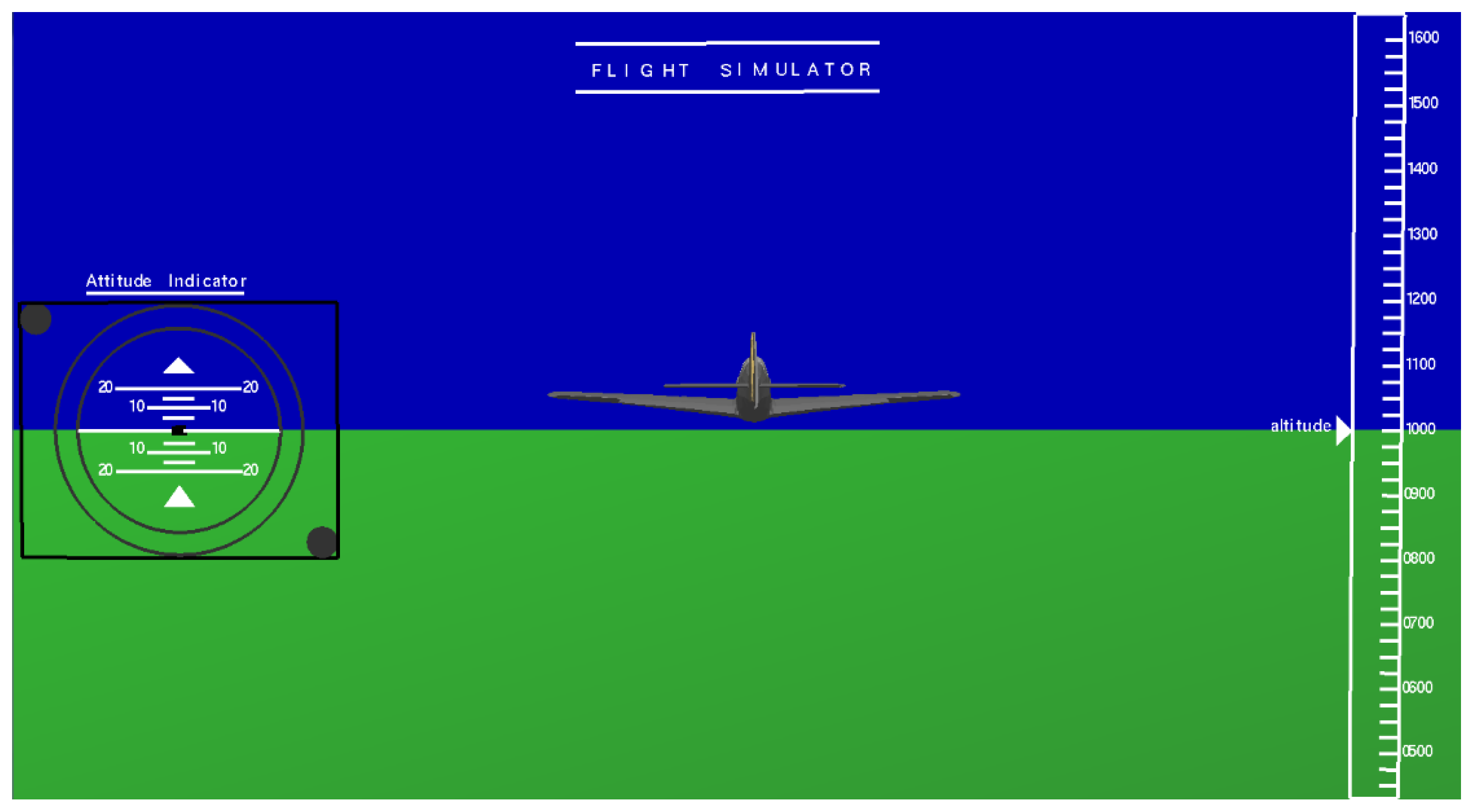
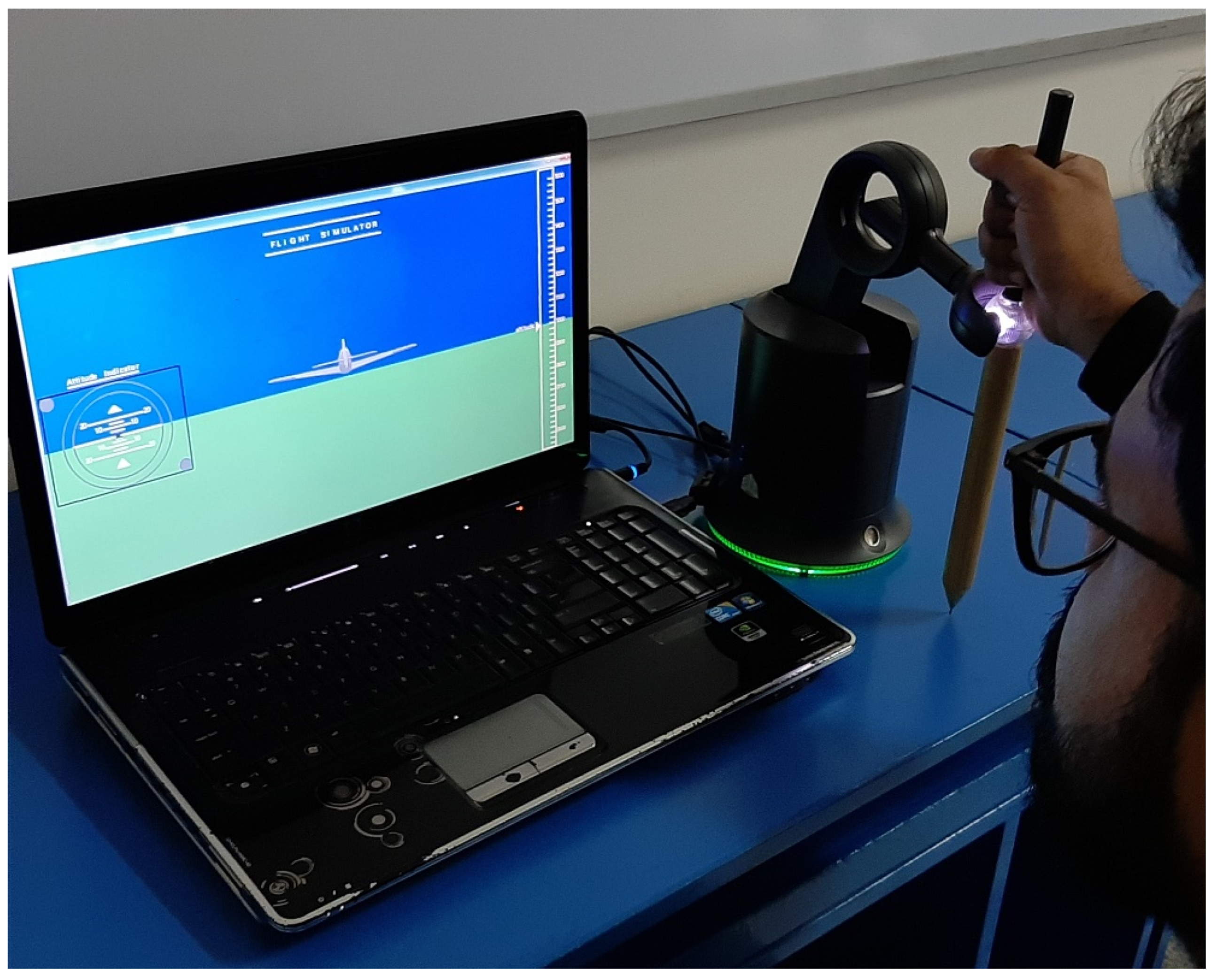
3. Experiment Design
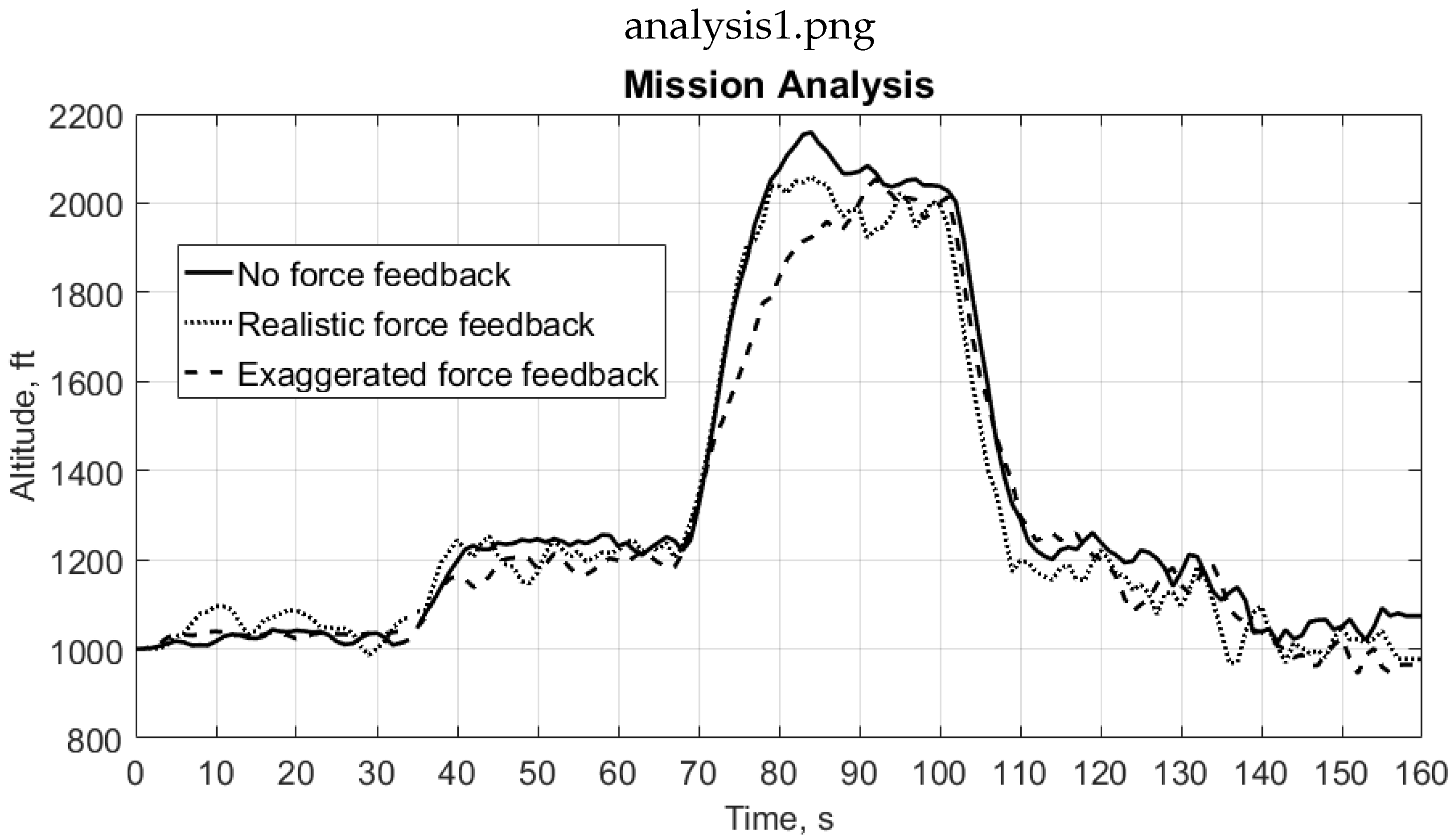
4. Results and Discussion
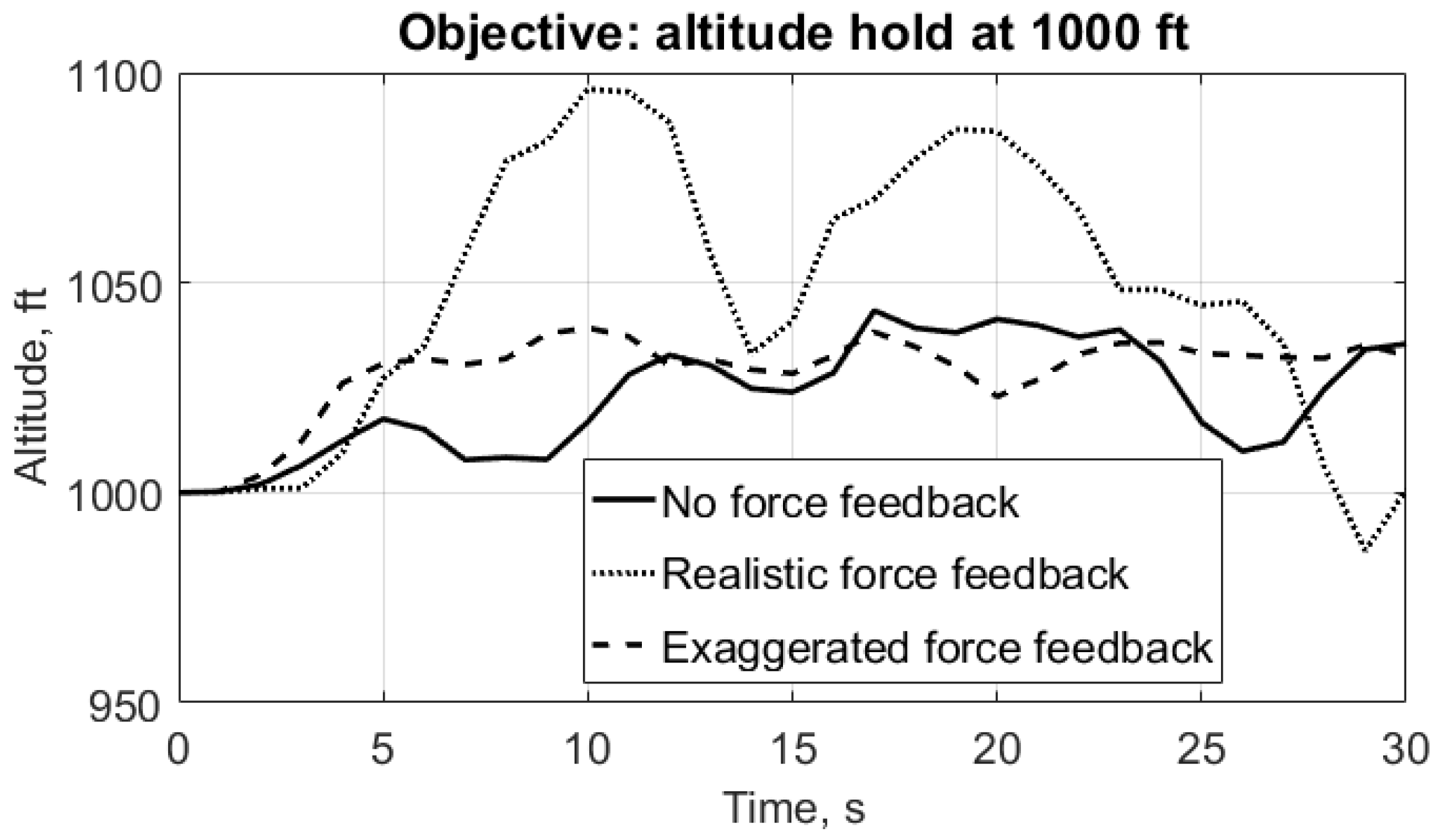
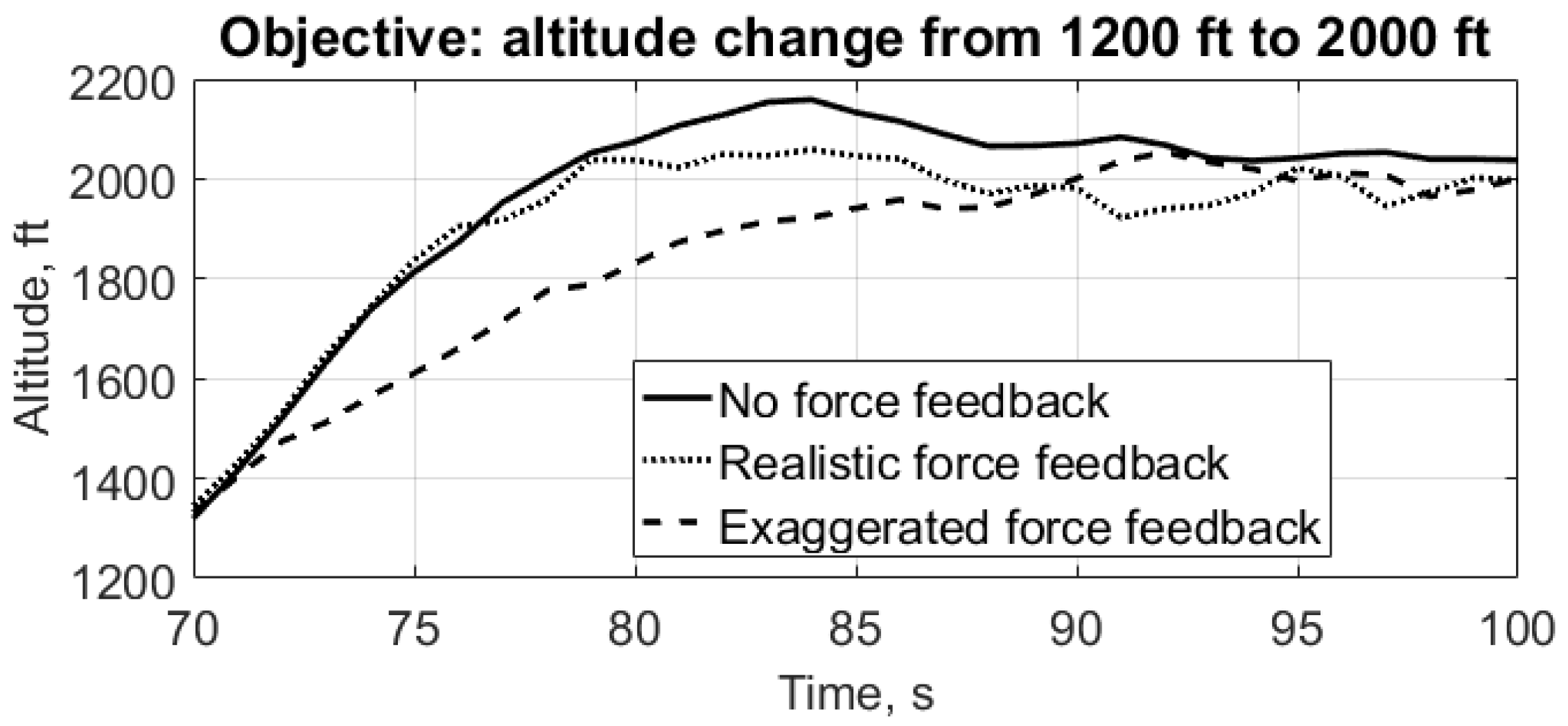
4.1. Rise Time and Overshoot Analysis
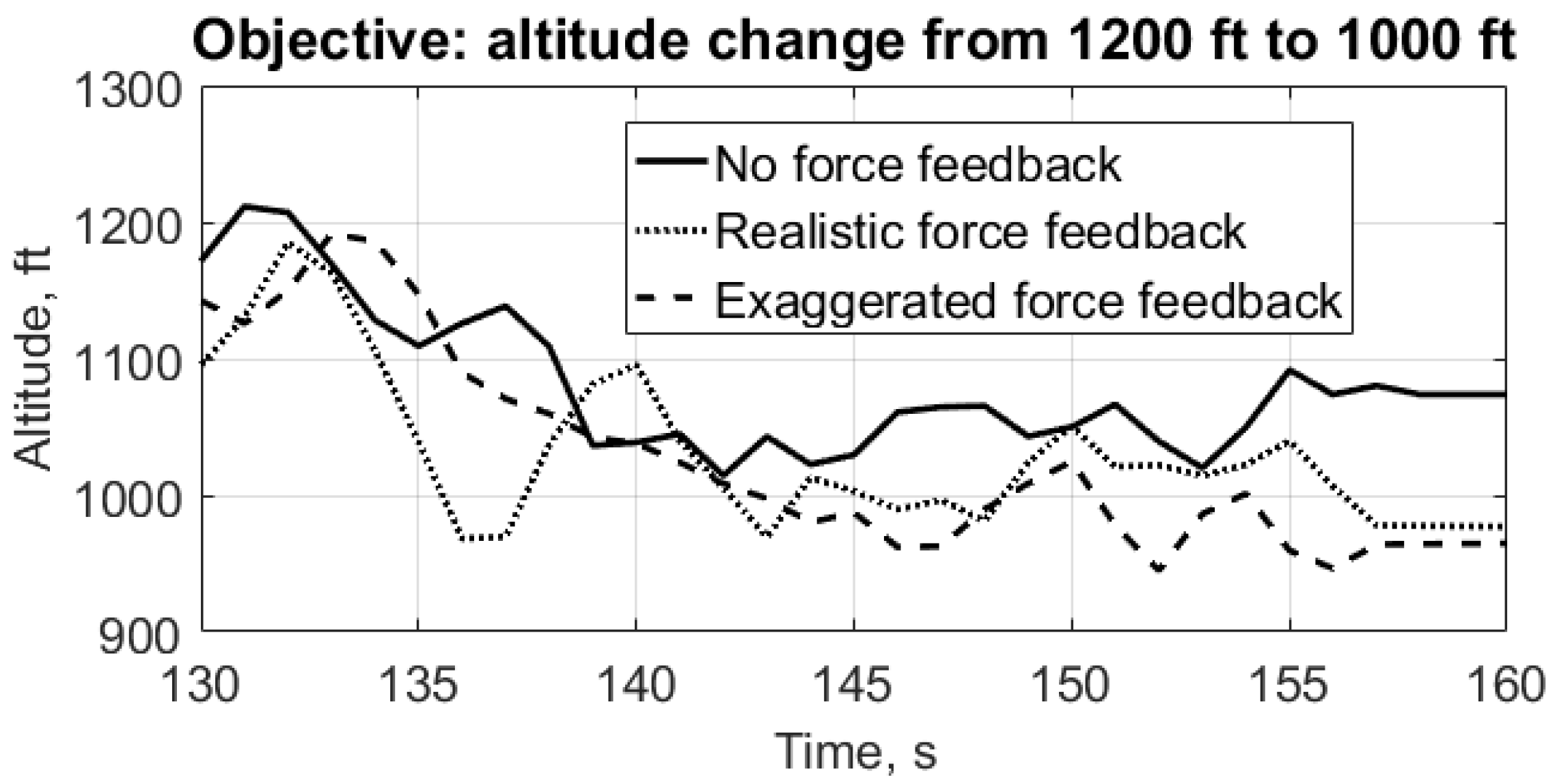
4.2. Fall Time and Undershoot Analysis
4.3. Settling Time Analysis
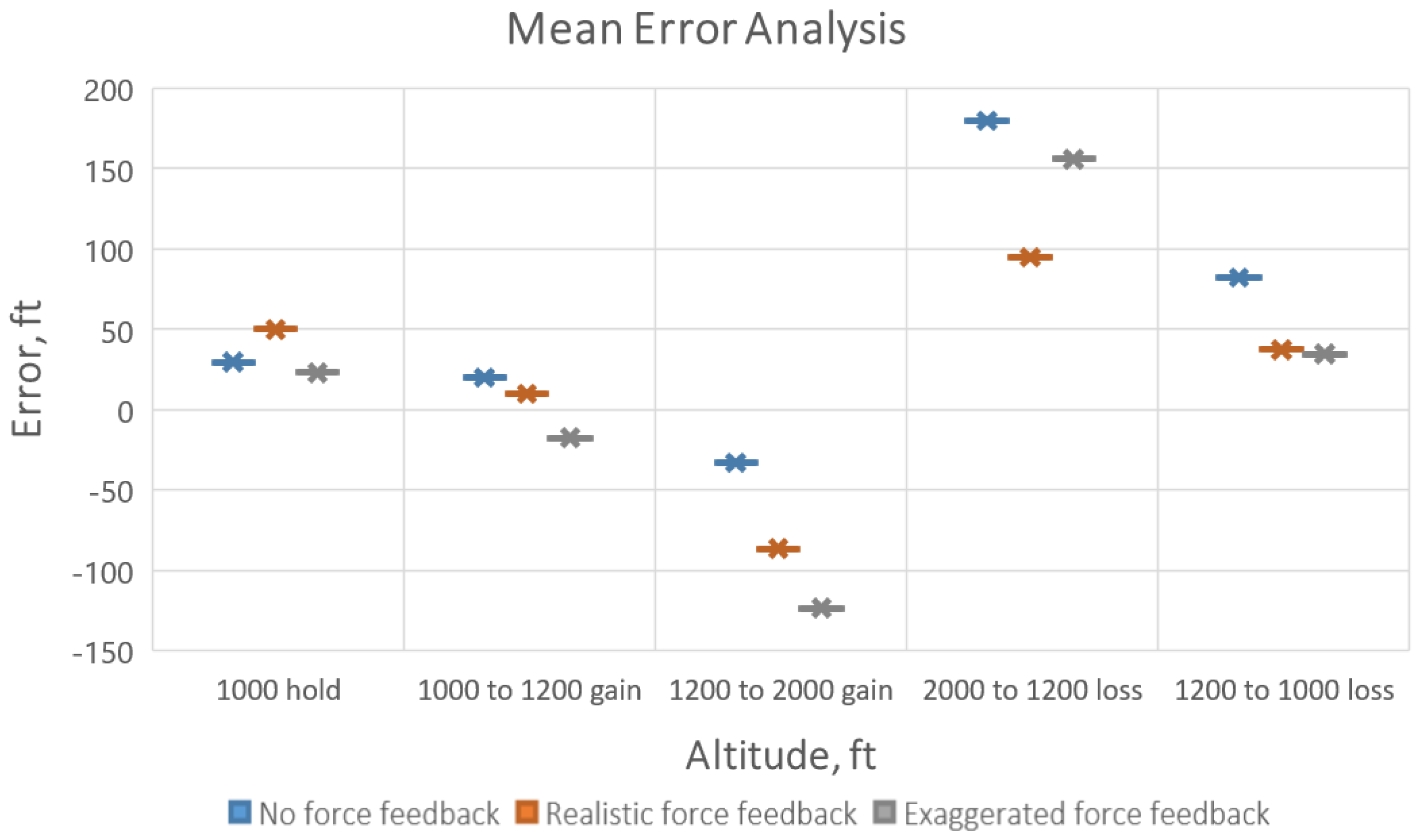
4.4. Error Analysis
4.5. Comparative Summary
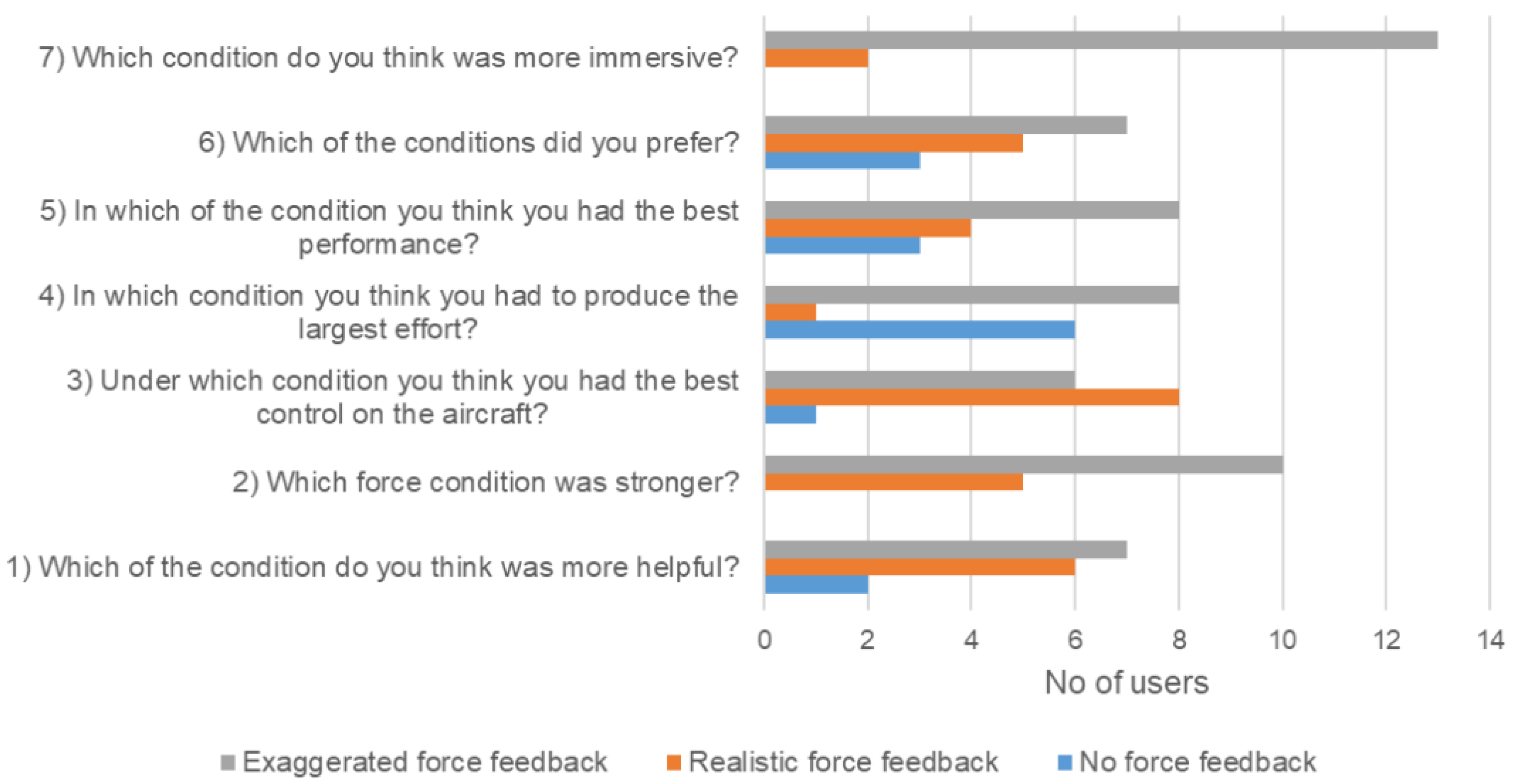
4.6. Subjective Evaluation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| DOF | Degree(s) of Freedom |
| GCS | Ground Control Station |
| FODE | First order differential equation(s) |
| SDK | Software Development Kit |
| ANOVA | Analysis of Varaince |
| HSD | Honest Significant Difference |
References
- Elhajj, I.; Xi, N.; Fung, W.K.; Liu, Y.H.; Li, W.J.; Kaga, T.; Fukuda, T. Haptic information in Internet-based teleoperation. IEEE/ASME Trans. Mechatron. 2001, 6, 295–304. [Google Scholar] [CrossRef]
- McCarley, J.S.; Wickens, C.D. Human Factors Implications of UAVs in the National Airspace; Technical Report AHFD-05 05/FAA-05-01; Aviation Human Factors Division, Institute of Aviation, University of Illinois at Urbana-Champaign: Champaign, IL, USA, 2005. [Google Scholar]
- Alaimo, S.M.C.; Pollini, L.; Bresciani, J.P.; Bülthoff, H.H. A comparison of Direct and Indirect Haptic Aiding for Remotely Piloted Vehicles. In Proceedings of the 19th International Symposium in Robot and Human Interactive Communication, Viareggio, Italy, 13–15 September 2010. [Google Scholar] [CrossRef]
- Ju, C.; Park, S.; Park, S.; Son, H.I. A Haptic Teleoperation of Agricultural Multi-UAV. In Proceedings of the IEEE IROS Workshop on Agricultural Robotics: Learning from Industry 4.0 and Moving into the Future, Vancouver, BC, Canada, 28 September 2017. [Google Scholar]
- Lam, T.M.; Boschloo, H.W.; Mulder, M.; van Paassen, M.M.; van der Helm, F.C.T. Effect of haptic feedback in a trajectory following task with an unmanned aerial vehicle. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics (IEEE Cat. No.04CH37583), Hague, The Netherlands, 10–13 October 2004; Volume 3, pp. 2500–2506. [Google Scholar] [CrossRef]
- Lam, T.M.; Delannoy, M.; Mulder, M.; van Paassen, M.M. Effects of Haptic Feedback in the Tele-Operation of an Unmanned Aerial Vehicle. In Proceedings of International Symposium on Aviation Psychology; Wright State University: Dayton, OH, USA, 2005. [Google Scholar]
- Lee, S.; Sukhatme, G.S.; Kim, G.J.; Park, C.M. Haptic Teleoperation of a Mobile Robot: A User Study. Presence Teleoperators Virtual Environ. 2005, 14, 345–365. [Google Scholar] [CrossRef]
- Lam, T.M.; Boschloo, H.W.; Mulder, M.; van Paassen, M.M. Artificial Force Field for Haptic Feedback in UAV Teleoperation. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2009, 39, 1316–1330. [Google Scholar] [CrossRef]
- Razzanelli, M.; Aringhieri, S.; Franzini, G.; Avanzini, G.; Giulietti, F.; Innocenti, M.; Pollini, L. A Visual-Haptic Display for Human and Autonomous Systems Integration. In Modelling and Simulation for Autonomous Systems; Hodicky, J., Ed.; Springer: Cham, Switzerland, 2016; pp. 64–80. [Google Scholar]
- Zhang, D.; Yang, G.; Khurshid, R.P. Haptic Teleoperation of UAVs Through Control Barrier Functions. IEEE Trans. Haptics 2020, 13, 109–115. [Google Scholar] [CrossRef] [PubMed]
- Olivari, M.; Nieuwenhuizen, F.M.; Bülthoff, H.H.; Pollini, L. Pilot Adaptation to Different Classes of Haptic Aids in Tracking Tasks. J. Guid. Control Dyn. 2014, 37, 1741–1753. [Google Scholar] [CrossRef]
- D’Intino, G.; Olivari, M.; Geluardi, S.; Venrooij, J.; Innocenti, M.; Bülthoff, H.H.; Pollini, L. Evaluation of haptic support system for training purposes in a tracking task. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 002169–002174. [Google Scholar]
- D’Intino, G.; Olivari, M.; Bülthoff, H.H.; Pollini, L. Haptic Assistance for Helicopter Control Based on Pilot Intent Estimation. J. Aerosp. Inf. Syst. 2020, 17, 193–203. [Google Scholar] [CrossRef]
- Okamura, A.M.; Verner, L.N.; Reiley, C.E.; Mahvash, M. Haptics for Robot-Assisted Minimally Invasive Surgery. In Robotics Research; Kaneko, M., Nakamura, Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 361–372. [Google Scholar]
- Abbink, D.A.; Mulder, M.; Boer, E.R. Haptic shared control: Smoothly shifting control authority? Cognit. Technol. Work 2012, 14, 19–28. [Google Scholar] [CrossRef]
- Mahony, R.; Schill, F.; Corke, P.; Oh, Y.S. A new framework for force feedback teleoperation of robotic vehicles based on optical flow. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 1079–1085. [Google Scholar] [CrossRef]
- Micconi, G.; Aleotti, J.; Caselli, S.; Benassi, G.; Zambelli, N.; Zappettini, A. Haptic guided UAV for detection of radiation sources in outdoor environments. In Proceedings of the 2015 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Cancun, Mexico, 23–25 November 2015; pp. 265–271. [Google Scholar] [CrossRef]
- Courtois, H.; Aouf, N. Haptic feedback for obstacle avoidance applied to unmanned aerial vehicles. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 417–424. [Google Scholar] [CrossRef]
- Ziat, M.; Wagner, S.; Frissen, I. Haptic Feedback to Compensate for the Absence of Horizon Cues During Landing. In Haptics: Perception, Devices, Control, and Applications; Bello, F., Kajimoto, H., Visell, Y., Eds.; Springer: Cham, Switzerland, 2016; pp. 47–54. [Google Scholar]
- Saddik, A.E. The Potential of Haptics Technologies. IEEE Instrum. Meas. Mag. 2007, 10, 10–17. [Google Scholar] [CrossRef]
- Morris, D.; Tan, H.; Barbagli, F.; Chang, T.; Salisbury, K. Haptic Feedback Enhances Force Skill Learning. In Proceedings of the Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Tsukaba, Japan, 22–24 March 2007; pp. 21–26. [Google Scholar] [CrossRef]
- Stegagno, P.; Basile, M.; Bülthoff, H.H.; Franchi, A. A semi-autonomous UAV platform for indoor remote operation with visual and haptic feedback. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3862–3869. [Google Scholar] [CrossRef]
- Schoemann, J.; Hornung, M. Modeling of Hybrid Electric Propulsion Systems for Small Unmanned Aerial Vehicles. In Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference and 14th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Indianapolis, IN, USA, 17–19 September 2012. [Google Scholar] [CrossRef]
- Vuruskan, A.; Yuksek, B.; Ozdemir, U.; Yukselen, A.; Inalhan, G. Dynamic modeling of a fixed-wing VTOL UAV. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 483–491. [Google Scholar] [CrossRef]
- Maqsood, A.; Go, T.H. Optimization of Hover-to-Cruise Transition Maneuver Using Variable-Incidence Wing. J. Aircr. 2010, 47, 1060–1064. [Google Scholar] [CrossRef]
- Stevens, B.; Lewis, F.; Johnson, E. Aircraft Dynamics and Classical Control Design. In Aircraft Control and Simulation: Dynamics, Controls Design, and Autonomous Systems; John Wiley & Sons, Ltd.: New York, NY, USA, 2015; Chapter 4; pp. 250–376. [Google Scholar] [CrossRef]
- Prisacariu, V. Analysis of UAVs Flight Characteristics. In Review of the Air Force Academy; Henri Coandă Air Force Academy Publishing House: Braşov, Romania, 2018; pp. 29–36. [Google Scholar] [CrossRef]
- Student. Errors of Routine Analysis. Biometrika 1927, 19, 151–164. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Notation |
|---|---|---|
| Wing span Area Weight Air density Rolling moment of inertia Pitching moment of inertia Yawing moment of inertia | m m kg kg/m kg·m kg·m kg·m | b s m |
| Source | Degrees of Freedom v | F Statistic | p-Value |
|---|---|---|---|
| Conditions Error | 2 228,062 | 39.9186 |
| Condition | Tukey HSD Q Stat | Tukey HSD p-Value | Tukey HSD Inference |
|---|---|---|---|
| None vs. Realistic force feedback None vs. Exaggerated force feedback Realistic vs. Exaggerated force feedback | 8.73 12.2736 3.5340 | 0.0010053 0.0010053 0.333626 |
| Time (s) | No Force Feedback | Realistic Force Feedback | Exaggerated Force Feedback |
|---|---|---|---|
| 35 to 70 s 70 to 100 | 5 8 | 3 10 | 6 20 |
| Time (s) | No Force Feedback | Realistic Force Feedback | Exaggerated Force Feedback |
|---|---|---|---|
| 0 to 30 35 to 70 70 to 100 | 4.36 12.0 7.9 | 9.6 9.9 2.9 | 3.9 7.8 2.6 |
| Time (s) | No Force Feedback | Realistic Force Feedback | Exaggerated Force Feedback |
|---|---|---|---|
| 100 to 130 130 to 160 | 13 12 | 10 6 | 10 12 |
| Time (s) | No Force Feedback | Realistic Force Feedback | Exaggerated Force Feedback |
|---|---|---|---|
| 100 to 130 130 to 160 | 4.9 1.4 | 10.1 3.1 | 11.1 5.5 |
| Time (s) | No Force Feedback | Realistic Force Feedback | Exaggerated Force Feedback |
|---|---|---|---|
| 35 to 70 70 to 100 100 to 130 130 to 160 | 26 26 20 8 | 16 23 - 11 | 10 18 - 5 |
| Time (s) | No Force Feedback | Realistic Force Feedback | Exaggerated Force Feedback |
|---|---|---|---|
| 35 to 70 70 to 100 100 to 130 130 to 160 | 9 6 10 0 | 18 8 - 20 | 24 14 - 25 |
| Performance Parameters | ||||||||
|---|---|---|---|---|---|---|---|---|
| Altitude | Force Condition | Rise Time | Overshoot Control | Fall Time | Undershoot Control | Settling Time | Mean Error | Best Selection |
| Hold | No force Realistic force Exaggerated force | • | • | • | ••• | |||
| Gain | No force Realistic force Exaggerated force | • | • | • | • | ••• | ||
| Descent | No force Realistic force Exaggerated force | • | • | • | • | • | ••• | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malik, H.A.; Rasool, S.; Maqsood, A.; Riaz, R. Effect of Haptic Feedback on Pilot/Operator Performance During Flight Simulation. Appl. Sci. 2020, 10, 3877. https://doi.org/10.3390/app10113877
Malik HA, Rasool S, Maqsood A, Riaz R. Effect of Haptic Feedback on Pilot/Operator Performance During Flight Simulation. Applied Sciences. 2020; 10(11):3877. https://doi.org/10.3390/app10113877
Chicago/Turabian StyleMalik, Hassam Ahmed, Shahzad Rasool, Adnan Maqsood, and Rizwan Riaz. 2020. "Effect of Haptic Feedback on Pilot/Operator Performance During Flight Simulation" Applied Sciences 10, no. 11: 3877. https://doi.org/10.3390/app10113877
APA StyleMalik, H. A., Rasool, S., Maqsood, A., & Riaz, R. (2020). Effect of Haptic Feedback on Pilot/Operator Performance During Flight Simulation. Applied Sciences, 10(11), 3877. https://doi.org/10.3390/app10113877