Joint Spatial-Spectral Smoothing in a Minimum-Volume Simplex for Hyperspectral Image Super-Resolution


Abstract
1. Introduction
2. Signal Models and Problem Formulation
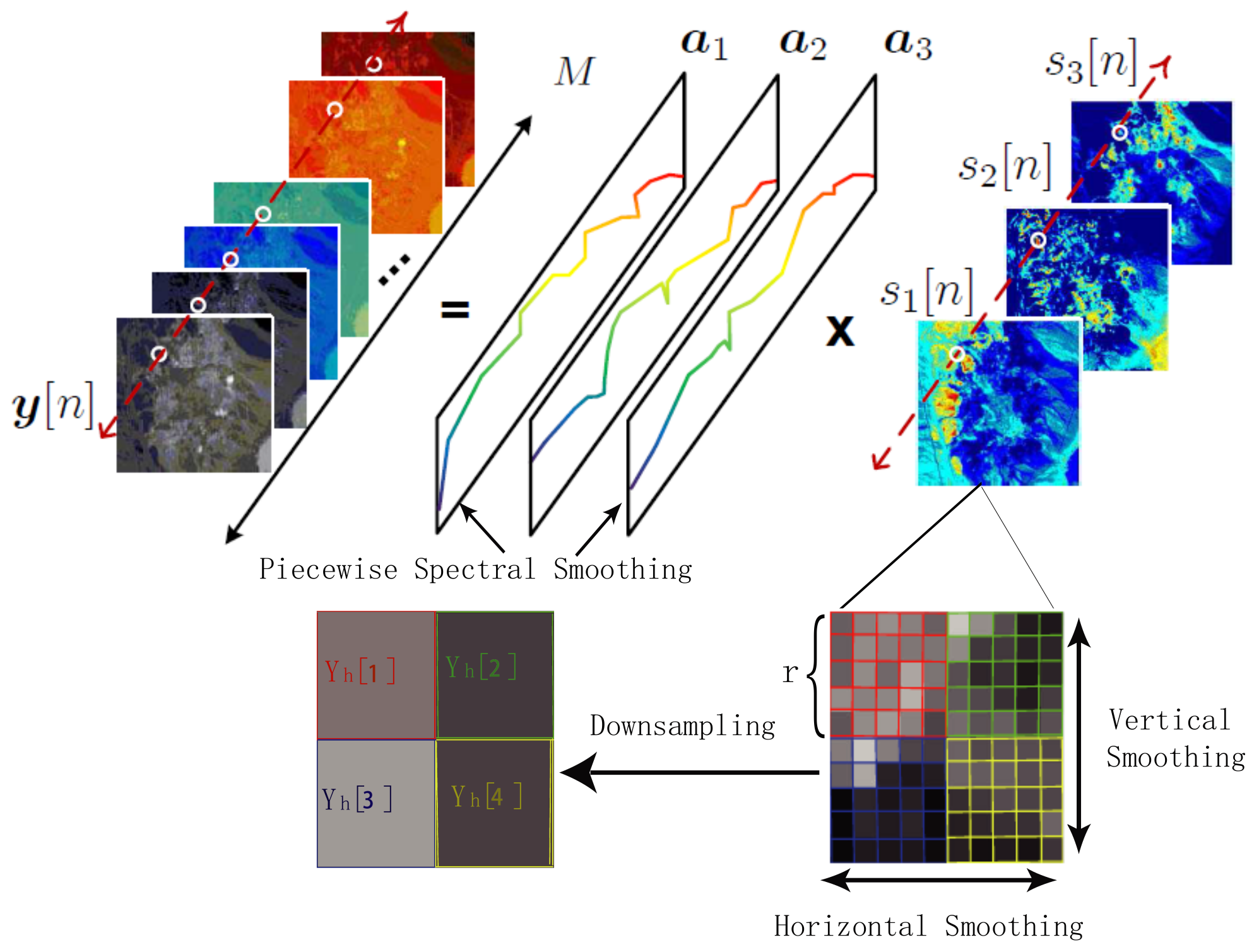
2.1. Signal Models
2.2. Problem Formulation
2.3. Regularization Reformulation
3. Proposed Fusion Algorithm
3.1. JSMV-CNMF Algorithm via AO
| Algorithm 1 JSMV-CNMF algorithm for solving (6). |
3.2. Abundance Estimation via ADMM
| Algorithm 2 Solving (11) via ADMM |
3.3. Endmember Estimation via ADMM
4. Experiments and Performance Analysis
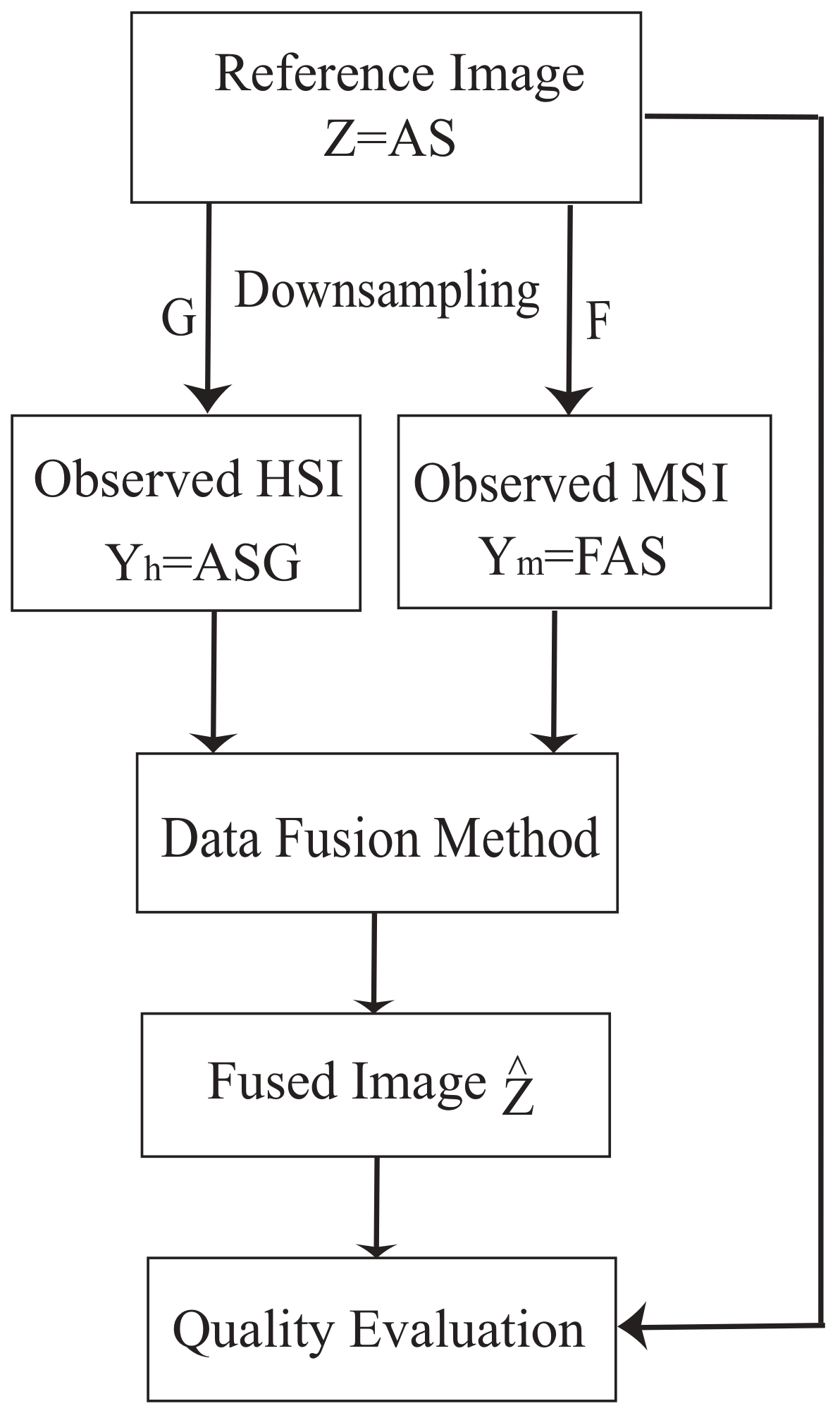
4.1. Experimental Methodology
4.2. Performance Metrics
- RSNR evaluates the spatial quality, defined as
- RMSE evaluates the error of global quality by
- SAM evaluates the spectral distortion, defined aswhere denotes the nth column of .
- ERGAS evaluates the relative dimensionless global error, defined aswhere r is the blurring factor, is the mean of the mth row vector and is the RMSE of the mth band image.
- DD is an indicator to estimate the spectral quality, defined as
- SSIM is to measure the structure similarity between the reconstructed and reference images, defined in [48].
4.3. Datasets
4.4. Parameter Settings
4.5. Performance Evaluation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bioucas-Dias, J.M.; Plaza, A.; Camps-Valls, G.; Scheunders, P.; Nasrabadi, N.; Chanussot, J. Hyperspectral Remote Sensing Data Analysis and Future Challenges. IEEE Trans. Geosci. Remote Sens. 2013, 1, 6–36. [Google Scholar] [CrossRef]
- Ma, W.K.; Bioucas-Dias, J.M.; Chan, T.H.; Gillis, N.; Gader, P.; Plaza, A.J.; Ambikapathi, A.; Chi, C.Y. A signal Processing Perspective on Hyperspectral Unmixing. IEEE Signal Process. Mag. 2014, 31, 67–81. [Google Scholar] [CrossRef]
- Khan, M.J.; Khan, H.S.; Yousaf, A.; Khurshid, K.; Abbas, A. Modern Trends in Hyperspectral Image Analysis: A Review. IEEE Access 2018, 6, 14118–14129. [Google Scholar] [CrossRef]
- Yokoya, N.; Grohnfeldt, C.; Chanussot, J. Hyperspectral and Multispectral Data Fusion: A Comparative Review of the Recent Literature. IEEE Geosci. Remote Sens. Mag. 2017, 5, 29–56. [Google Scholar] [CrossRef]
- Loncan, L.; de Almeida, L.B.; Bioucas-Dias, J.M.; Briottet, X.; Chanussot, J.; Dobigeon, N.; Fabre, S.; Liao, W.; Licciardi, G.A.; Simoes, M.; et al. Hyperspectral Pansharpening: A Review. IEEE Geosci. Remote Sens. Mag. 2015, 3, 27–46. [Google Scholar] [CrossRef]
- Mura, M.D.; Prasad, S.; Pacifici, F.; Gamba, P.; Chanussot, J.; Benediktsson, J.A. Challenges and Opportunities of Multimodality and Data Fusion in Remote Sensing. Proc. IEEE 2015, 103, 1585–1601. [Google Scholar] [CrossRef]
- Vivone, G.; Restaino, R.; Licciardi, G.; Mura, M.D.; Chanussot, J. MultiResolution Analysis and Component Substitution techniques for hyperspectral Pansharpening. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 2649–2652. [Google Scholar]
- Aiazzi, B.; Baronti, S.; Selva, M. Improving Component Substitution Pansharpening through Multivariate Regression of MS +Pan Data. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3230–3239. [Google Scholar] [CrossRef]
- Vivone, G.; Restaino, R.; Mura, M.D.; Licciardi, G.; Chanussot, J. Contrast and Error-Based Fusion Schemes for Multispectral Image Pansharpening. IEEE Geosci. Remote Sens. Lett. 2014, 11, 930–934. [Google Scholar] [CrossRef]
- Liu, J.G. Smoothing Filter-based Intensity Modulation: A Spectral Preserve Image Fusion Technique for Improving Spatial Details. Int. J. Remote Sens. 2000, 21, 3461–3472. [Google Scholar] [CrossRef]
- Yang, J.; Zhao, Y.Q.; Chan, J.C.W. Hyperspectral and Multispectral Image Fusion via Deep Two-Branches Convolutional Neural Network. Remote Sens. 2018, 10, 800. [Google Scholar] [CrossRef]
- Chang, Y.; Yan, L.; Fang, H.; Zhong, S.; Liao, W. Hyperspectral Image Restoration via Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2019, 57, 667–682. [Google Scholar] [CrossRef]
- Han, X.; Yu, J.; Luo, J.; Sun, W. Hyperspectral and Multispectral Image Fusion Using Cluster-Based Multi-Branch BP Neural Networks. Remote Sens. 2019, 11, 1173. [Google Scholar] [CrossRef]
- Hardie, R.C.; Eismann, M.T.; Wilson, G.L. MAP Estimation for Hyperspectral Image Rresolution Enhancement Using an Auxiliary Sensor. IEEE Trans. Image Process. 2004, 13, 1174–1184. [Google Scholar] [CrossRef] [PubMed]
- Simoes, M.; Bioucas-Dias, J.; Almeida, L.B.; Chanussot, J. A Convex Formulation for Hyperspectral Image Superresolution via Subspace-Based Regularization. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3373–3388. [Google Scholar] [CrossRef]
- Wei, Q.; Bioucas-Dias, J.; Dobigeon, N.; Tourneret, J.Y. Hyperspectral and Multispectral Image Fusion Based on a Sparse Representation. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3658–3668. [Google Scholar] [CrossRef]
- Wei, Q.; Dobigeon, N.; Tourneret, J.Y. Fast Fusion of Multi-Band Images Based on Solving a Sylvester Equation. IEEE Trans. Image Process. 2015, 24, 4109–4121. [Google Scholar] [CrossRef]
- Kolda, T.G.; Bader, B.W. Tensor Decompositions and Applications. SIAM Rev. 2009, 51, 455–500. [Google Scholar] [CrossRef]
- Kanatsoulis, C.I.; Fu, X.; Sidiropoulos, N.D.; Ma, W. Hyperspectral Super-Resolution: A Coupled Tensor Factorization Approach. IEEE Trans. Signal Process. 2018, 66, 6503–6517. [Google Scholar] [CrossRef]
- Li, S.; Dian, R.; Fang, L.; Bioucas-Dias, J.M. Fusing Hyperspectral and Multispectral Images via Coupled Sparse Tensor Factorization. IEEE Trans. Image Process. 2018, 27, 4118–4130. [Google Scholar] [CrossRef]
- Zhang, K.; Wang, M.; Yang, S.; Jiao, L. Spatial–Spectral-Graph-Regularized Low-Rank Tensor Decomposition for Multispectral and Hyperspectral Image Fusion. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2018, 11, 1030–1040. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, X.; Han, Z.; He, S. Hyperspectral Image Super-Resolution via Nonlocal Low-Rank Tensor Approximation and Total Variation Regularization. Remote Sens. 2017, 9, 1286. [Google Scholar] [CrossRef]
- Qian, Y.; Xiong, F.; Zeng, S.; Zhou, J.; Tang, Y.Y. Matrix-Vector Nonnegative Tensor Factorization for Blind Unmixing of Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1776–1792. [Google Scholar] [CrossRef]
- Craig, M.D. Minimum-volume Transforms for Remotely Sensed Data. IEEE Trans. Geosci. Remote Sens. 1994, 32, 542–552. [Google Scholar] [CrossRef]
- Yokoya, N.; Yairi, T.; Iwasaki, A. Coupled Nonnegative Matrix Factorization Unmixing for Hyperspectral and Multispectral Data Fusion. IEEE Trans. Geosci. Remote Sens. 2012, 50, 528–537. [Google Scholar] [CrossRef]
- Sigurdsson, J.; Ulfarsson, M.O.; Sveinsson, J.R. Blind Hyperspectral Unmixing Using Total Variation and ℓq Sparse Regularization. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6371–6384. [Google Scholar] [CrossRef]
- Lanaras, C.; Baltsavias, E.; Schindler, K. Hyperspectral Super-Resolution with Spectral Unmixing Constraints. Remote Sens. 2017, 9, 1196. [Google Scholar] [CrossRef]
- Nezhad, Z.H.; Karami, A.; Heylen, R.; Scheunders, P. Fusion of Hyperspectral and Multispectral Images Using Spectral Unmixing and Sparse Coding. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 2377–2389. [Google Scholar] [CrossRef]
- Bioucas-Dias, J.M.; Figueiredo, M.A.T. Alternating direction algorithms for constrained sparse regression: Application to hyperspectral unmixing. In Proceedings of the 2010 2nd Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing, Reykjavik, Iceland, 14–16 June 2010; pp. 1–4. [Google Scholar]
- Yang, J.; Wright, J.; Huang, T.S.; Ma, Y. Image Super-resolution via Sparse Representation. IEEE Trans. Image Process. 2010, 19, 2861–2873. [Google Scholar] [CrossRef]
- Wycoff, E.; Chan, T.H.; Jia, K.; Ma, W.K.; Ma, Y. A Non-negative Sparse Promoting Algorithm for High Resolution Hyperspectral Imaging. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 1409–1413. [Google Scholar]
- Lin, C.H.; Ma, F.; Chi, C.Y.; Hsieh, C.H. A Convex Optimization-Based Coupled Nonnegative Matrix Factorization Algorithm for Hyperspectral and Multispectral Data Fusion. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1652–1667. [Google Scholar] [CrossRef]
- Huang, W.; Xiao, L.; Liu, H.; Wei, Z. Hyperspectral Imagery Super-Resolution by Compressive Sensing Inspired Dictionary Learning and Spatial-Spectral Regularization. Sensors 2015, 15, 2041–2058. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y.; Liu, Y.; Zhang, C.; He, M.; Mei, S. Hyperspectral and Multispectral Image Fusion Using CNMF with Minimum Endmember Simplex Volume and Abundance Sparsity Constraints. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 1929–1932. [Google Scholar]
- Zhao, W.; Lu, H.; Wang, D. Multisensor Image Fusion and Enhancement in Spectral Total Variation Domain. IEEE Trans. Multimedia 2018, 20, 866–879. [Google Scholar] [CrossRef]
- Yang, F.; Ma, F.; Ping, Z.; Xu, G. Total Variation and Signature-Based Regularizations on Coupled Nonnegative Matrix Factorization for Data Fusion. IEEE Access 2019, 7, 2695–2706. [Google Scholar] [CrossRef]
- Bioucas-Dias, J.; Plaza, A.; Dobigeon, N.; Parente, M.; Du, Q.; Gader, P.; Chanussot, J. Hyperspectral Unmixing Overview: Geometrical, Statistical, and Sparse Regression-based Approaches. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2012, 5, 354–379. [Google Scholar] [CrossRef]
- Farsiu, S.; Robinson, M.D.; Elad, M.; Milanfar, P. Fast and Robust Multiframe Super Resolution. IEEE Trans. Image Process. 2004, 13, 1327–1344. [Google Scholar] [CrossRef] [PubMed]
- Chan, T.H.; Chi, C.Y.; Huang, Y.M.; Ma, W.K. A Convex Analysis Based Minimum-volume Enclosing Simplex Algorithm for Hyperspectral Unmixing. IEEE Trans. Signal Process. 2009, 57, 4418–4432. [Google Scholar] [CrossRef]
- Li, J.; Bioucas-Dias, J.M.; Plaza, A. Collaborative Nonnegative Matrix Factorization for Remotely Sensed Hyperspectral Unmixing. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 3078–3081. [Google Scholar]
- Berman, M.; Kiiveri, H.; Lagerstrom, R.; Ernst, A.; Dunne, R.; Huntington, J.F. ICE: A Statistical Approach to Identifying Endmembers in Hyperspectral Images. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2085–2095. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Arora, S.; Ge, R.; Halpern, Y.; Mimno, D.; Moitra, A.; Sontag, D.; Wu, Y.; Zhu, M. A Practical Algorithm for Topic Modeling with Provable Guarantees. arXiv 2012, arXiv:1212.4777. [Google Scholar]
- Lin, C.H.; Chi, C.Y.; Wang, Y.H.; Chan, T.H. A Fast Hyperplane-Based Minimum-Volume Enclosing Simplex Algorithm for Blind Hyperspectral Unmixing. IEEE Trans. Signal Process. 2016, 64, 1946–1961. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers. Foundat. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Bertsekas, D.P.; Tsitsiklis, J.N. Parallel and Distributed Computation: Numerical Methods; Prentice Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Wald, L.; Ranchin, T.; Mangolini, M. Fusion of Satellite Images of Different Spatial Resolutions: Assessing the Quality of Resulting Images. Photogramm. Eng. Remote Sens. 1997, 63, 691–699. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- ROSIS. Free Pavia University Data. Available online: http://www.ehu.eus/ccwintco/index.php?title=Hyperspectral_Remote_Sensing_Scenes (accessed on 21 May 2019).
- AVIRIS. Free Standard Data Products. Available online: http://aviris.jpl.nasa.gov/html/aviris.freedata.html. (accessed on 21 May 2019).
- Wei, Q.; Bioucas-Dias, J.; Dobigeon, N.; Tourneret, J.Y.; Chen, M.; Godsill, S. Multiband Image Fusion Based on Spectral Unmixing. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7236–7249. [Google Scholar] [CrossRef]
- Stathaki, T. Image Fusion; Academic Press: Oxford, UK, 2008. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 2006. [Google Scholar]
- Chang, C. A Review of Virtual Dimensionality for Hyperspectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1285–1305. [Google Scholar] [CrossRef]
- Chang, C.I.; Du, Q. Estimation of Number of Spectrally Distinct Signal Sources in Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2004, 42, 608–619. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Explanations |
|---|---|
| , , | Set of real number, n-vector, matrices |
| , , | Set of non-negative real number, n-vector, matrices |
| Frobenius-norm | |
| , and | All-zero vector, all-one vector, identity matrix |
| ith m-dimensional unit vector | |
| Convex hull of the set | |
| Vector formed by stacking the columns of the matrix | |
| ⊗ | Kronecker product |
| Orthogonal projection onto the non-negative orthant | |
| ⪰ | Component-wise inequality operation |
| Mode-n product of |
| Methods | CNMF | BSR | HySure | CSTF | Proposed | Ideal | |
|---|---|---|---|---|---|---|---|
| SNR(Ym) = 40 dB SNR(Yh) = 35 dB | DD | 62.15 | 94.72 | 96.51 | 61.15 | 45.76 | 0 |
| RSNR(dB) | 25.78 | 22.04 | 21.97 | 26.23 | 27.61 | ||
| RMSE | 96.38 | 148.24 | 149.49 | 91.52 | 78.11 | 0 | |
| SAM | 2.55 | 3.16 | 4.04 | 2.90 | 2.52 | 0 | |
| ERGAS | 1.38 | 2.07 | 2.10 | 1.30 | 1.13 | 0 | |
| SSIM | 0.97 | 0.96 | 0.96 | 0.97 | 0.98 | 1 | |
| SNR(Ym) = 30 dB SNR(Yh) = 30 dB | DD | 80.80 | 102.41 | 110.38 | 72.13 | 63.59 | 0 |
| RSNR(dB) | 24.20 | 21.74 | 21.10 | 25.31 | 25.90 | ||
| RMSE | 115.63 | 153.56 | 165.24 | 101.74 | 95.05 | 0 | |
| SAM | 3.23 | 3.43 | 4.42 | 3.24 | 3.03 | 0 | |
| ERGAS | 1.59 | 2.13 | 2.24 | 1.44 | 1.35 | 0 | |
| SSIM | 0.96 | 0.95 | 0.95 | 0.96 | 0.97 | 1 | |
| SNR(Ym) = 25 dB SNR(Yh) = 20 dB | DD | 152.02 | 119.75 | 138.96 | 114.90 | 92.19 | 0 |
| RSNR(dB) | 18.64 | 20.73 | 19.36 | 21.78 | 23.46 | ||
| RMSE | 219.22 | 172.35 | 201.77 | 152.74 | 125.83 | 0 | |
| SAM | 7.23 | 3.95 | 5.49 | 5.13 | 3.93 | 0 | |
| ERGAS | 2.59 | 2.37 | 2.63 | 2.15 | 1.69 | 0 | |
| SSIM | 0.87 | 0.93 | 0.91 | 0.91 | 0.94 | 1 | |
| Methods | CNMF | BSR | HySure | CSTF | Proposed | Ideal | |
|---|---|---|---|---|---|---|---|
| SNR(Ym) = 40 dB SNR(Yh) = 35 dB | DD | 71.44 | 94.91 | 98.70 | 73.37 | 42.91 | 0 |
| RSNR(dB) | 25.38 | 23.25 | 22.86 | 26.60 | 29.55 | ||
| RMSE | 111.49 | 142.55 | 149.01 | 103.12 | 68.98 | 0 | |
| SAM | 1.76 | 2.06 | 3.23 | 2.44 | 1.65 | 0 | |
| ERGAS | 1.18 | 1.53 | 1.55 | 1.05 | 0.80 | 0 | |
| SSIM | 0.98 | 0.97 | 0.97 | 0.972 | 0.99 | 1 | |
| SNR(Ym) = 30 dB SNR(Yh) = 30 dB | DD | 88.56 | 100.92 | 107.84 | 80.80 | 60.72 | 0 |
| RSNR(dB) | 24.23 | 22.93 | 22.38 | 25.58 | 27.63 | ||
| RMSE | 127.28 | 147.76 | 157.54 | 108.91 | 86.01 | 0 | |
| SAM | 2.37 | 2.38 | 3.44 | 2.62 | 2.04 | 0 | |
| ERGAS | 1.35 | 1.58 | 1.64 | 1.16 | 0.92 | 0 | |
| SSIM | 0.97 | 0.96 | 0.96 | 0.97 | 0.98 | 1 | |
| SNR(Ym) = 25 dB SNR(Yh) = 20 dB | DD | 150.43 | 112.29 | 128.10 | 131.06 | 91.07 | 0 |
| RSNR(dB) | 20.18 | 22.24 | 21.31 | 21.64 | 24.66 | ||
| RMSE | 202.99 | 159.99 | 178.24 | 171.45 | 121.16 | 0 | |
| SAM | 5.02 | 2.76 | 3.98 | 4.55 | 2.73 | 0 | |
| ERGAS | 2.07 | 1.71 | 1.86 | 1.89 | 1.28 | 0 | |
| SSIM | 0.91 | 0.95 | 0.94 | 0.92 | 0.96 | 1 | |
| Variable | Equation | Complexity | Pavia University | Moffett | ||
|---|---|---|---|---|---|---|
| OM | PRT (Seconds) | OM | PRT (Seconds) | |||
| (17a) | . | 31.225 | 57.537 | |||
| (18) | 0.024 | 0.028 | ||||
| (17b) | 0.257 | 0.272 | ||||
| (19) | 0.087 | 0.093 | ||||
| (21a) | 27.196 | 42.635 | ||||
| (22) | 0.023 | 0.107 | ||||
| (21b) | 0.009 | 0.013 | ||||
| (23) | 0.002 | 0.002 | ||||
| Dataset | Running Time (Seconds) | ||||
|---|---|---|---|---|---|
| CNMF | BSR | HySure | CSTF | Proposed | |
| Pavia University | 6.5 | 103.2 | 18.7 | 19.6 | 152.9 |
| Moffett | 9.2 | 94.5 | 17.6 | 20.6 | 178.3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, F.; Yang, F.; Ping, Z.; Wang, W. Joint Spatial-Spectral Smoothing in a Minimum-Volume Simplex for Hyperspectral Image Super-Resolution. Appl. Sci. 2020, 10, 237. https://doi.org/10.3390/app10010237
Ma F, Yang F, Ping Z, Wang W. Joint Spatial-Spectral Smoothing in a Minimum-Volume Simplex for Hyperspectral Image Super-Resolution. Applied Sciences. 2020; 10(1):237. https://doi.org/10.3390/app10010237
Chicago/Turabian StyleMa, Fei, Feixia Yang, Ziliang Ping, and Wenqin Wang. 2020. "Joint Spatial-Spectral Smoothing in a Minimum-Volume Simplex for Hyperspectral Image Super-Resolution" Applied Sciences 10, no. 1: 237. https://doi.org/10.3390/app10010237
APA StyleMa, F., Yang, F., Ping, Z., & Wang, W. (2020). Joint Spatial-Spectral Smoothing in a Minimum-Volume Simplex for Hyperspectral Image Super-Resolution. Applied Sciences, 10(1), 237. https://doi.org/10.3390/app10010237