
Shifting Perceptions and Emotional Responses to Autonomous Vehicles Using Simulated Experiences

 , ,
, ,  , and
, and 
Abstract
:1. Introduction
1.1. Background
1.2. Research Rationale
2. Materials and Methods
2.1. Participants
2.2. Materials and Procedure
3. Results
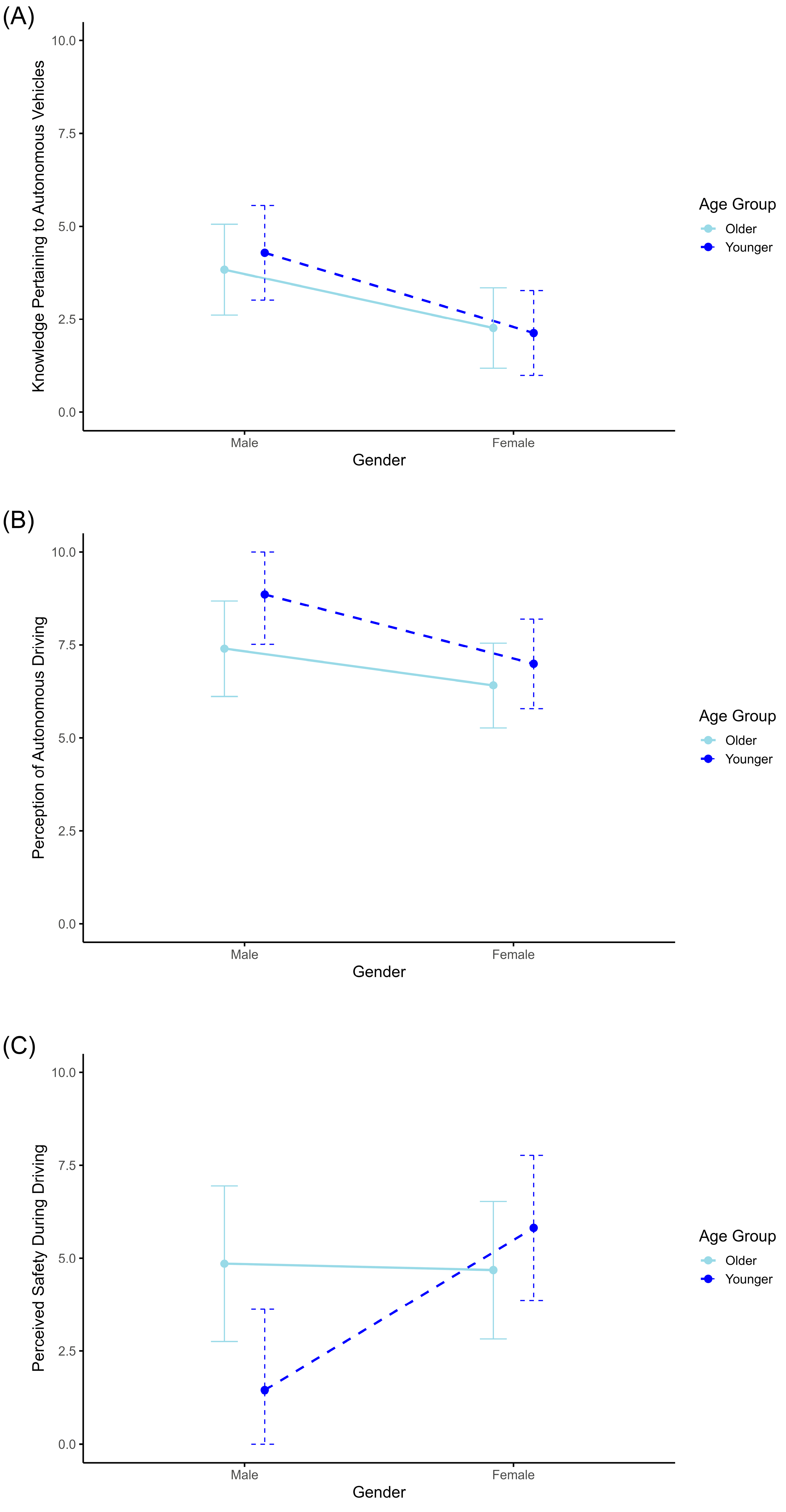
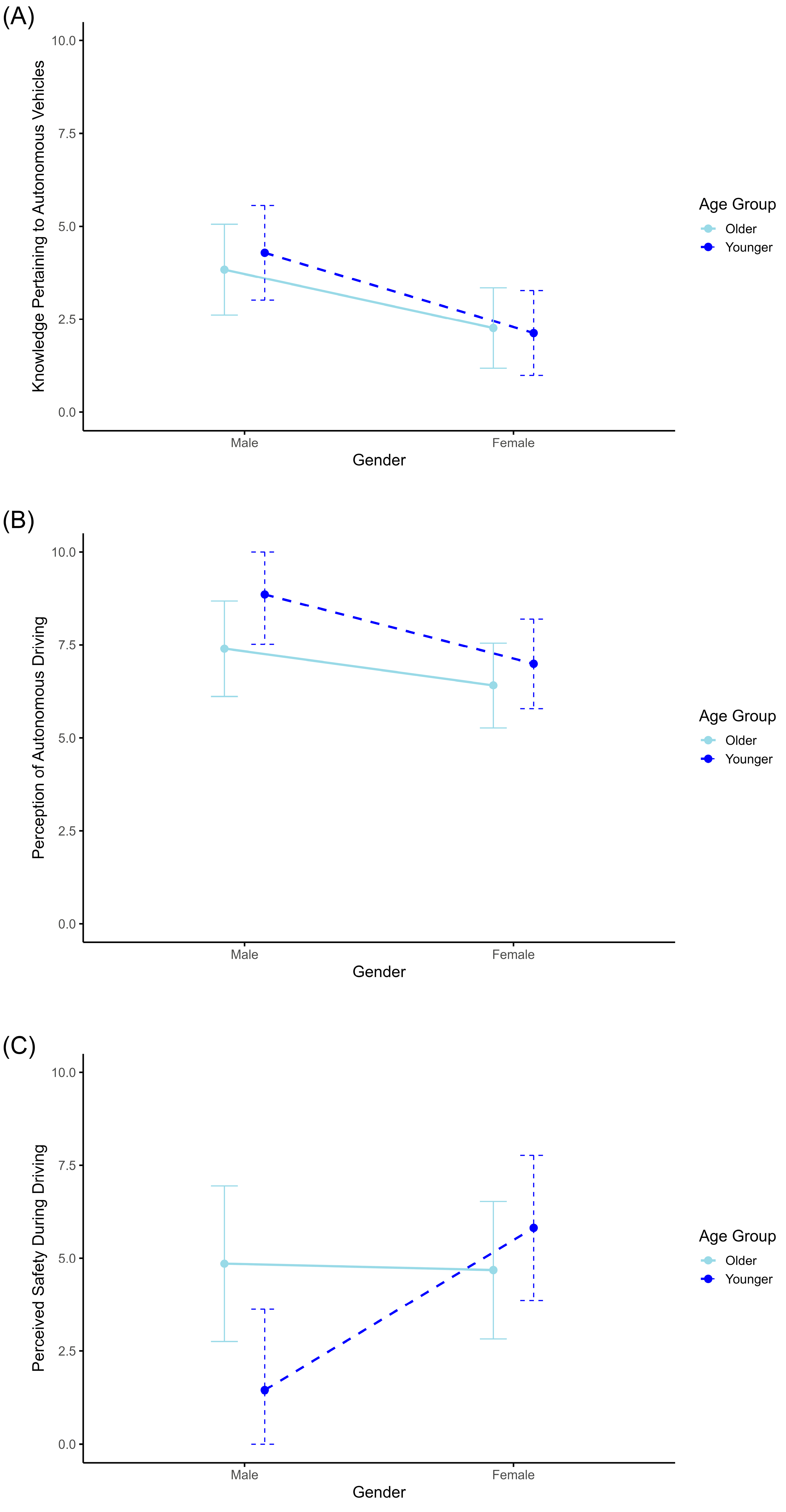
3.1. Autonomous Vehicles: Divergences in Knowledge, Perception, and Safety
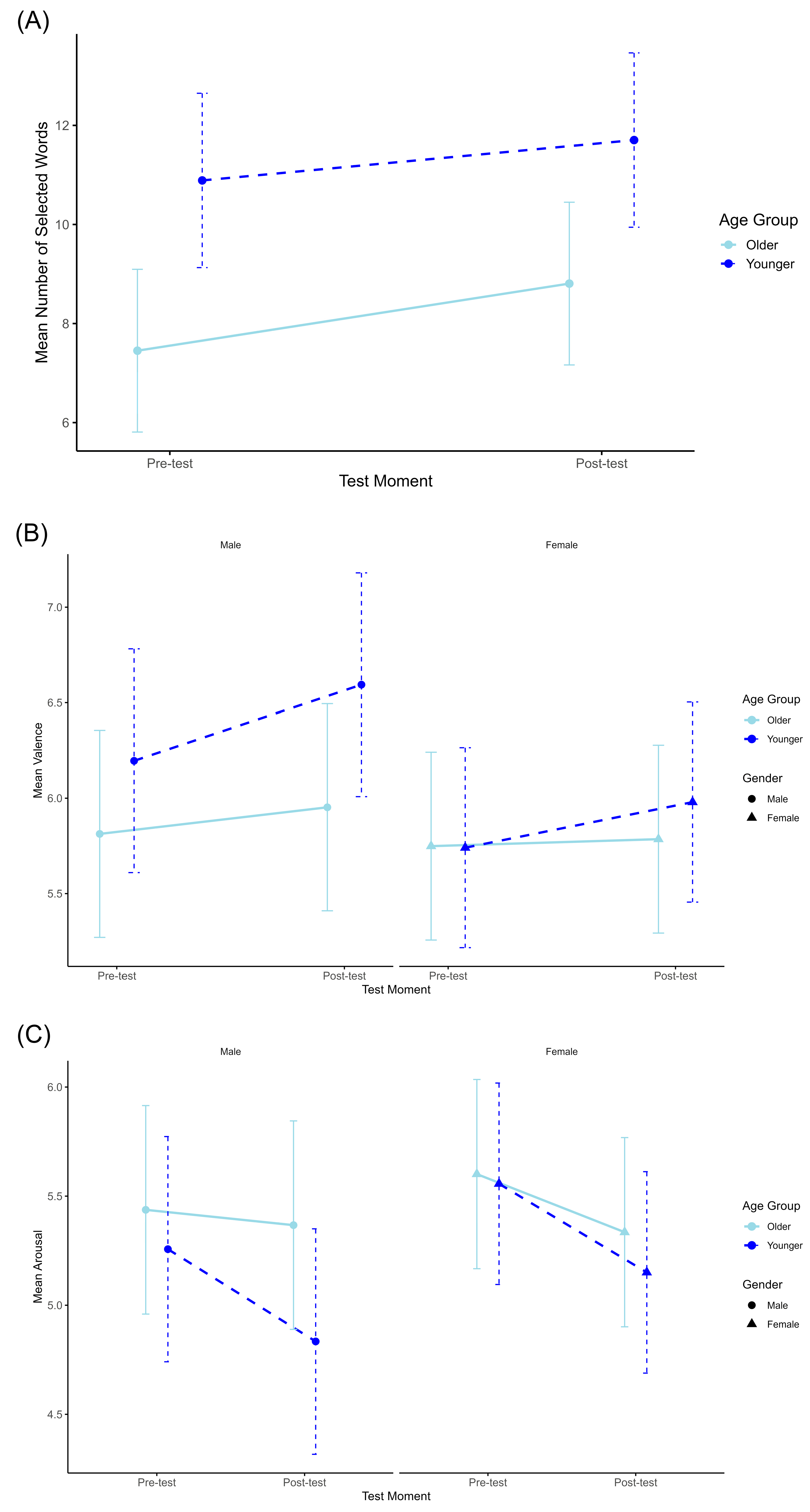
3.2. Emotional Responses to Autonomous Vehicle Simulation Experience
4. Discussion
4.1. Practical Implications
4.2. Limitations and Future Research Directions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Word List and Standardized Arousal and Valence Values
| Word (Spanish) | Word (English) | Valence | Arousal |
| agradable | pleasant | 8 | 2.8 |
| angustia | anguish | 1.95 | 7.25 |
| aprensión | apprehensiveness | 3.75 | 6 |
| autonomía | autonomy | 6.85 | 4.4 |
| certeza | certainty | 7.05 | 4.25 |
| coherencia | coherence | 7.5 | 4.1 |
| complejidad | complexity | 4.5 | 6.2 |
| confianza | confidence | 8.18 | 2.85 |
| electricidad | electricity | 5.35 | 6.1 |
| error | error | 2.9 | 6.5 |
| fiabilidad | reliability | 6.65 | 4.75 |
| firmeza | firmness | 5.95 | 5.4 |
| funcionalidad | functionality | 6.2 | 5 |
| futuro | future | 6.35 | 6.35 |
| impreciso | imprecise | 4.15 | 6 |
| incertidumbre | uncertainty | 3.55 | 7.2 |
| independencia | independence | 6.8 | 5.05 |
| inestabilidad | instability | 2.25 | 6.8 |
| innovación | innovation | 7.05 | 5.5 |
| inquietud | concern | 3.5 | 7.1 |
| inteligencia | intelligence | 7.85 | 5.65 |
| mecánico | mechanical | 4.95 | 5.2 |
| miedo | fear | 2 | 8 |
| modernidad | modernity | 6.1 | 5.4 |
| movilidad | mobility | 6.9 | 5.35 |
| peligro | danger | 2.93 | 8 |
| preocupación | worry | 2.35 | 7.3 |
| protección | protection | 7.2 | 4.55 |
| relajación | relaxation | 7.25 | 1.5 |
| riesgo | risk | 4.6 | 7.1 |
| seguridad | security | 6.95 | 2.58 |
| sostenibilidad | sustainability | 6.25 | 4.45 |
| tecnología | technology | 6.2 | 5.4 |
| tranquilidad | tranquility | 7.8 | 1.75 |
| utilidad | utility | 7.3 | 4.75 |
| vulnerabilidad | vulnerability | 2.3 | 6.15 |
References
- Zali, N.; Amiri, S.; Yigitcanlar, T.; Soltani, A. Autonomous Vehicle Adoption in Developing Countries: Futurist Insights. Energies 2022, 15, 8464. [Google Scholar] [CrossRef]
- Placek, M. Autonomous Vehicles’ Global Market Penetration Rate 2021–2030. Available online: https://www.statista.com/statistics/875080/av-market-penetration-worldwide-forecast/ (accessed on 8 June 2023).
- Bagloee, S.A.; Tavana, M.; Asadi, M.; Oliver, T. Autonomous Vehicles: Challenges, Opportunities, and Future Implications for Transportation Policies. J. Mod. Transport. 2016, 24, 284–303. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. The Impact of Autonomous Vehicles on Cities: A Review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Othman, K. Benefits of Vehicle Automation for Public Transportation Operations. CTCSE 2020, 6, 1–5. [Google Scholar] [CrossRef]
- Othman, K. Exploring the Implications of Autonomous Vehicles: A Comprehensive Review. Innov. Infrastruct. Solut. 2022, 7, 165. [Google Scholar] [CrossRef]
- Rezaei, A.; Caulfield, B. Simulating a Transition to Autonomous Mobility. Simul. Model. Pract. Theory 2021, 106, 102175. [Google Scholar] [CrossRef]
- Nastjuk, I.; Herrenkind, B.; Marrone, M.; Brendel, A.B.; Kolbe, L.M. What Drives the Acceptance of Autonomous Driving? An Investigation of Acceptance Factors from an End-User’s Perspective. Technol. Forecast. Soc. Chang. 2020, 161, 120319. [Google Scholar] [CrossRef]
- Othman, K. Public Acceptance and Perception of Autonomous Vehicles: A Comprehensive Review. AI Ethics 2021, 1, 355–387. [Google Scholar] [CrossRef]
- Golbabaei, F.; Yigitcanlar, T.; Paz, A.; Bunker, J. Individual Predictors of Autonomous Vehicle Public Acceptance and Intention to Use: A Systematic Review of the Literature. J. Open Innov. Technol. Mark. Complex. 2020, 6, 106. [Google Scholar] [CrossRef]
- Thomas, E.; McCrudden, C.; Wharton, Z.; Behera, A. Perception of Autonomous Vehicles by the Modern Society: A Survey. IET Intell. Transp. Syst. 2020, 14, 1228–1239. [Google Scholar] [CrossRef]
- Hunter, J.G.; Konishi, M.; Jain, N.; Akash, K.; Wu, X.; Misu, T.; Reid, T. The Interaction Gap: A Step Toward Understanding Trust in Autonomous Vehicles Between Encounters. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2022, 66, 147–151. [Google Scholar] [CrossRef]
- Avetisian, L.; Ayoub, J.; Zhou, F. Anticipated Emotions Associated with Trust in Autonomous Vehicles. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2022, 66, 199–203. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What Drives People to Accept Automated Vehicles? Findings from a Field Experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- Cho, Y.; Park, J.; Park, S.; Jung, E.S. Technology Acceptance Modeling Based on User Experience for Autonomous Vehicles. J. Ergon. Soc. Korea 2017, 36, 87–108. [Google Scholar] [CrossRef]
- Montoro, L.; Useche, S.A.; Alonso, F.; Lijarcio, I.; Bosó-Seguí, P.; Martí-Belda, A. Perceived Safety and Attributed Value as Predictors of the Intention to Use Autonomous Vehicles: A National Study with Spanish Drivers. Saf. Sci. 2019, 120, 865–876. [Google Scholar] [CrossRef]
- Penmetsa, P.; Sheinidashtegol, P.; Musaev, A.; Adanu, E.K.; Hudnall, M. Effects of the Autonomous Vehicle Crashes on Public Perception of the Technology. IATSS Res. 2021, 45, 485–492. [Google Scholar] [CrossRef]
- Sener, I.N.; Zmud, J.; Williams, T. Measures of Baseline Intent to Use Automated Vehicles: A Case Study of Texas Cities. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 66–77. [Google Scholar] [CrossRef]
- Zoellick, J.C.; Kuhlmey, A.; Schenk, L.; Schindel, D.; Blüher, S. Amused, Accepted, and Used? Attitudes and Emotions towards Automated Vehicles, Their Relationships, and Predictive Value for Usage Intention. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 68–78. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing Public Opinions of and Interest in New Vehicle Technologies: An Austin Perspective. Transp. Res. Part C Emerg. Technol. 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Kyriakidis, M.; Happee, R.; de Winter, J.C.F. Public Opinion on Automated Driving: Results of an International Questionnaire among 5000 Respondents. Transp. Res. Part F Traffic Psychol. Behav. 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Schoettle, B.; Sivak, M. A Survey of Public Opinion about Autonomous and Self-Driving Vehicles in the U.S., the U.K., and Australia; University of Michigan Transportation Research Institute: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Cao, J.; Lin, L.; Zhang, J.; Zhang, L.; Wang, Y.; Wang, J. The Development and Validation of the Perceived Safety of Intelligent Connected Vehicles Scale. Accid. Anal. Prev. 2021, 154, 106092. [Google Scholar] [CrossRef] [PubMed]
- Akalin, N.; Kristoffersson, A.; Loutfi, A. Evaluating the Sense of Safety and Security in Human–Robot Interaction with Older People. In Social Robots: Technological, Societal and Ethical Aspects of Human-Robot Interaction; Human–Computer Interaction Series; Korn, O., Ed.; Springer International Publishing: Cham, Switzerland, 2019; pp. 237–264. ISBN 978-3-030-17107-0. [Google Scholar]
- Lee, J.-G.; Kim, K.J.; Lee, S.; Shin, D.-H. Can Autonomous Vehicles Be Safe and Trustworthy? Effects of Appearance and Autonomy of Unmanned Driving Systems. Int. J. Hum. Comput. Interact. 2015, 31, 682–691. [Google Scholar] [CrossRef]
- Epstein, S. Integration of the Cognitive and the Psychodynamic Unconscious. Am. Psychol. 1994, 49, 709. [Google Scholar] [CrossRef] [PubMed]
- Kahneman, D. Maps of Bounded Rationality: Psychology for Behavioral Economics. Am. Econ. Rev. 2003, 93, 1449–1475. [Google Scholar] [CrossRef]
- Damasio, A.R. Descartes’ Error: Emotion, Reason, and the Human Brain; Putnam: New York, NY, USA, 1994; Volume 352. [Google Scholar]
- Finucane, M.L.; Alhakami, A.; Slovic, P.; Johnson, S.M. The Affect Heuristic in Judgments of Risks and Benefits. J. Behav. Decis. Mak. 2000, 13, 1–17. [Google Scholar] [CrossRef]
- Lerner, J.S.; Li, Y.; Valdesolo, P.; Kassam, K.S. Emotion and Decision Making. Annu. Rev. Psychol. 2015, 66, 799–823. [Google Scholar] [CrossRef]
- Slovic, P.; Finucane, M.L.; Peters, E.; MacGregor, D.G. Risk as Analysis and Risk as Feelings: Some Thoughts about Affect, Reason, Risk, and Rationality. Risk Anal. 2004, 24, 311–322. [Google Scholar] [CrossRef]
- Slovic, P.; Peters, E.; Finucane, M.L.; MacGregor, D.G. Affect, Risk, and Decision Making. Health Psychol. 2005, 24, S35–S40. [Google Scholar] [CrossRef]
- Block, E.S.; Erskine, L. Interviewing by Telephone: Specific Considerations, Opportunities, and Challenges. Int. J. Qual. Methods 2012, 11, 428–445. [Google Scholar] [CrossRef]
- Chen, K.; Lou, V.W.Q. Measuring Senior Technology Acceptance: Development of a Brief, 14-Item Scale. Innov. Aging 2020, 4, igaa016. [Google Scholar] [CrossRef]
- Kaye, L.K.; Rocabado, J.F.; Rodriguez-Cuadrado, S.; Jones, B.R.; Malone, S.A.; Wall, H.J.; Duñabeitia, J.A. Exploring the (Lack of) Facilitative Effect of Emoji for Word Processing. Comput. Hum. Behav. 2023, 139, 107563. [Google Scholar] [CrossRef]
- Kim, D.; Lowder, M.W.; Choi, W. Emotionality Effects in Korean Visual Word Recognition: Evidence from Lab-Based and Web-Based Lexical Decision Tasks. Acta Psychol. 2023, 237, 103944. [Google Scholar] [CrossRef] [PubMed]
- Siakaluk, P.D.; Newcombe, P.I.; Duffels, B.; Li, E.; Sidhu, D.M.; Yap, M.J.; Pexman, P.M. Effects of Emotional Experience in Lexical Decision. Front. Psychol. 2016, 7, 1157. [Google Scholar] [CrossRef] [PubMed]
- Vinson, D.; Ponari, M.; Vigliocco, G. How Does Emotional Content Affect Lexical Processing? Cogn. Emot. 2014, 28, 737–746. [Google Scholar] [CrossRef] [PubMed]
- Brooks, J.A.; Shablack, H.; Gendron, M.; Satpute, A.B.; Parrish, M.H.; Lindquist, K.A. The Role of Language in the Experience and Perception of Emotion: A Neuroimaging Meta-Analysis. Soc. Cogn. Affect. Neurosci. 2017, 12, 169–183. [Google Scholar] [CrossRef] [PubMed]
- Fazio, R.H.; Sanbonmatsu, D.M.; Powell, M.C.; Kardes, F.R. On the Automatic Activation of Attitudes. J. Personal. Soc. Psychol. 1986, 50, 229–238. [Google Scholar] [CrossRef] [PubMed]
- Whissell, C.M. Perceived Locus of Causality as a Variable Affecting Use of Emotional Words. Percept. Mot. Ski. 1983, 57, 127–131. [Google Scholar] [CrossRef]
- Ho, J.S.; Tan, B.C.; Lau, T.C.; Khan, N. Public Acceptance towards Emerging Autonomous Vehicle Technology: A Bibliometric Research. Sustainability 2023, 15, 1566. [Google Scholar] [CrossRef]
- Abraham, H.; Lee, C.; Brady, S.; Fitzgerald, C.; Reimer, B.; Coughlin, J.F. Autonomous Vehicles, Trust, and Driving Alternatives: A Survey of Consumer Preferences. Mass. Inst. Technol. AgeLab Camb. 2016, 1, 2018-12. [Google Scholar]
- Richardson, E.; Davies, P. The Changing Public’s Perception of Self-Driving Cars. 2018. [Google Scholar] [CrossRef]
- Piao, J.; McDonald, M.; Hounsell, N.; Graindorge, M.; Graindorge, T.; Malhene, N. Public Views towards Implementation of Automated Vehicles in Urban Areas. Transp. Res. Procedia 2016, 14, 2168–2177. [Google Scholar] [CrossRef]
- Stadthagen-Gonzalez, H.; Imbault, C.; Pérez Sánchez, M.A.; Brysbaert, M. Norms of Valence and Arousal for 14,031 Spanish Words. Behav. Res. 2017, 49, 111–123. [Google Scholar] [CrossRef] [PubMed]
- RStudio Team. RStudio: Integrated Development Environment for R; RStudio, PBC.: Boston, MA, USA, 2020. [Google Scholar]
- The Jamovi Project 2022. jamovi (Version 2.3) [Computer Software]. Available online: https://www.jamovi.org (accessed on 20 December 2023).
- Bensalem, E. Foreign Language Anxiety of EFL Students: Examining the Effect of Self-Efficacy, Self- Perceived Proficiency and Sociobiographical Variables. AWEJ 2018, 9, 38–55. [Google Scholar] [CrossRef]
- Hudson, J.; Orviska, M.; Hunady, J. People’s Attitudes to Autonomous Vehicles. Transp. Res. Part A Policy Pract. 2019, 121, 164–176. [Google Scholar] [CrossRef]
- Rubin, M.; Badea, C. They’re All the Same! But for Several Different Reasons: A Review of the Multicausal Nature of Perceived Group Variability. Curr. Dir. Psychol. Sci. 2012, 21, 367–372. [Google Scholar] [CrossRef]
- Moody, J.; Bailey, N.; Zhao, J. Public Perceptions of Autonomous Vehicle Safety: An International Comparison. Saf. Sci. 2020, 121, 634–650. [Google Scholar] [CrossRef]
- Huang, G.; Hung, Y.-H.; Proctor, R.W.; Pitts, B.J. Age Is More than Just a Number: The Relationship among Age, Non-Chronological Age Factors, Self-Perceived Driving Abilities, and Autonomous Vehicle Acceptance. Accid. Anal. Prev. 2022, 178, 106850. [Google Scholar] [CrossRef]
- Srour Zreik, R.; Harvey, M.; Brewster, S.A. Age Matters: Investigating Older Drivers’ Perception of Level 3 Autonomous Cars as a Heterogeneous Age Group. In Proceedings of the Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ingolstadt, Germany, 18 September 2023; Association for Computing Machinery: New York, NY, USA, 2023; pp. 13–18. [Google Scholar]
- Forman, C.; Goldfarb, A.; Greenstein, S. Technology Adoption In and Out of Major Urban Areas: When Do Internal Firm Resources Matter Most? Transp. Res. Part A Policy Pract. 2005, 94, 374–385. [Google Scholar] [CrossRef]
- Isaacson, M.; Rubinton, H. Information and Communications Technology Spending and City Size. SSRN J. 2021, 7, 1–2. [Google Scholar] [CrossRef]
- Zhang, Q.; Wallbridge, C.D.; Jones, D.M.; Morgan, P.L. Public Perception of Autonomous Vehicle Capability Determines Judgment of Blame and Trust in Road Traffic Accidents. Transp. Res. Part A Policy Pract. 2024, 179, 103887. [Google Scholar] [CrossRef]
- Hőgye-Nagy, Á.; Kovács, G.; Kurucz, G. Acceptance of Self-Driving Cars among the University Community: Effects of Gender, Previous Experience, Technology Adoption Propensity, and Attitudes toward Autonomous Vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2023, 94, 353–361. [Google Scholar] [CrossRef]
- Hand, S.; Lee, Y.-C. Who Would Put Their Child Alone In An Autonomous Vehicle? Preliminary Look At Gender Differences. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2018, 62, 256–259. [Google Scholar] [CrossRef]
- Hohenberger, C.; Spörrle, M.; Welpe, I.M. How and Why Do Men and Women Differ in Their Willingness to Use Automated Cars? The Influence of Emotions across Different Age Groups. Transp. Res. Part A Policy Pract. 2016, 94, 374–385. [Google Scholar] [CrossRef]
- Payre, W.; Cestac, J.; Delhomme, P. Intention to Use a Fully Automated Car: Attitudes and a Priori Acceptability. Transp. Res. Part F Traffic Psychol. Behav. 2014, 27, 252–263. [Google Scholar] [CrossRef]
- Palomares, N.; Belda-Lois, J.M.; Mateo, B.; Iranzo, S.; Silva, J.; Nalda-Tárrega, V.D.; Laparra, J.; Solaz, J. Development of Empathic Autonomous Vehicles through Understanding the Passenger’s Emotional State. In Proceedings of the Human Factors in Transportation, New York, NY, USA, 24–28 July 2022; AHFE Open Acces: New York, NY, USA, 2022; Volume 60. [Google Scholar]
- Payre, W.; Cestac, J.; Delhomme, P. Fully Automated Driving: Impact of Trust and Practice on Manual Control Recovery. Hum. Factors 2016, 58, 229–241. [Google Scholar] [CrossRef]
- Loewenstein, G.F.; Weber, E.U.; Hsee, C.K.; Welch, N. Risk as Feelings. Psychol. Bull. 2001, 127, 267–286. [Google Scholar] [CrossRef]
- Charness, N.; Yoon, J.S.; Souders, D.; Stothart, C.; Yehnert, C. Predictors of Attitudes Toward Autonomous Vehicles: The Roles of Age, Gender, Prior Knowledge, and Personality. Front. Psychol. 2018, 9, 2589. [Google Scholar] [CrossRef]
- Lee, J.; Baig, F.; Li, X. Media Influence, Trust, and the Public Adoption of Automated Vehicles. IEEE Intell. Transp. Syst. Mag. 2022, 14, 174–187. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
| Age Group | Gender | N | Mean | SD | Min. | Max. | |
|---|---|---|---|---|---|---|---|
| Age | Younger | Male | 12 | 23.3 | 2.39 | 20 | 28 |
| Younger | Female | 15 | 23.6 | 2.20 | 21 | 27 | |
| Older | Male | 14 | 57.6 | 4.27 | 51 | 65 | |
| Older | Female | 17 | 56.2 | 3.30 | 51 | 63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tapia, J.L.; Sánchez-Borda, D.; Iniesta, C.; Badea, F.; Duñabeitia, J.A. Shifting Perceptions and Emotional Responses to Autonomous Vehicles Using Simulated Experiences. Behav. Sci. 2024, 14, 29. https://doi.org/10.3390/bs14010029
Tapia JL, Sánchez-Borda D, Iniesta C, Badea F, Duñabeitia JA. Shifting Perceptions and Emotional Responses to Autonomous Vehicles Using Simulated Experiences. Behavioral Sciences. 2024; 14(1):29. https://doi.org/10.3390/bs14010029
Chicago/Turabian StyleTapia, Jose L., David Sánchez-Borda, Carmen Iniesta, Francisco Badea, and Jon Andoni Duñabeitia. 2024. "Shifting Perceptions and Emotional Responses to Autonomous Vehicles Using Simulated Experiences" Behavioral Sciences 14, no. 1: 29. https://doi.org/10.3390/bs14010029
APA StyleTapia, J. L., Sánchez-Borda, D., Iniesta, C., Badea, F., & Duñabeitia, J. A. (2024). Shifting Perceptions and Emotional Responses to Autonomous Vehicles Using Simulated Experiences. Behavioral Sciences, 14(1), 29. https://doi.org/10.3390/bs14010029