2.2.1. Digital Terrain Model
The Digital Terrain Model (DTM) used in this study was obtained from the photogrammetric model provided by the DGT. The aerial photogrammetric survey for the basic cartographic data acquisition along Portugal’s mainland coastal strip area, of approximately 513,400 ha, was carried out in 2008, with a spatial resolution of 2 m. In total, 4139 files of elevation points (X, Y, Z) were processed for the DTM calculation.
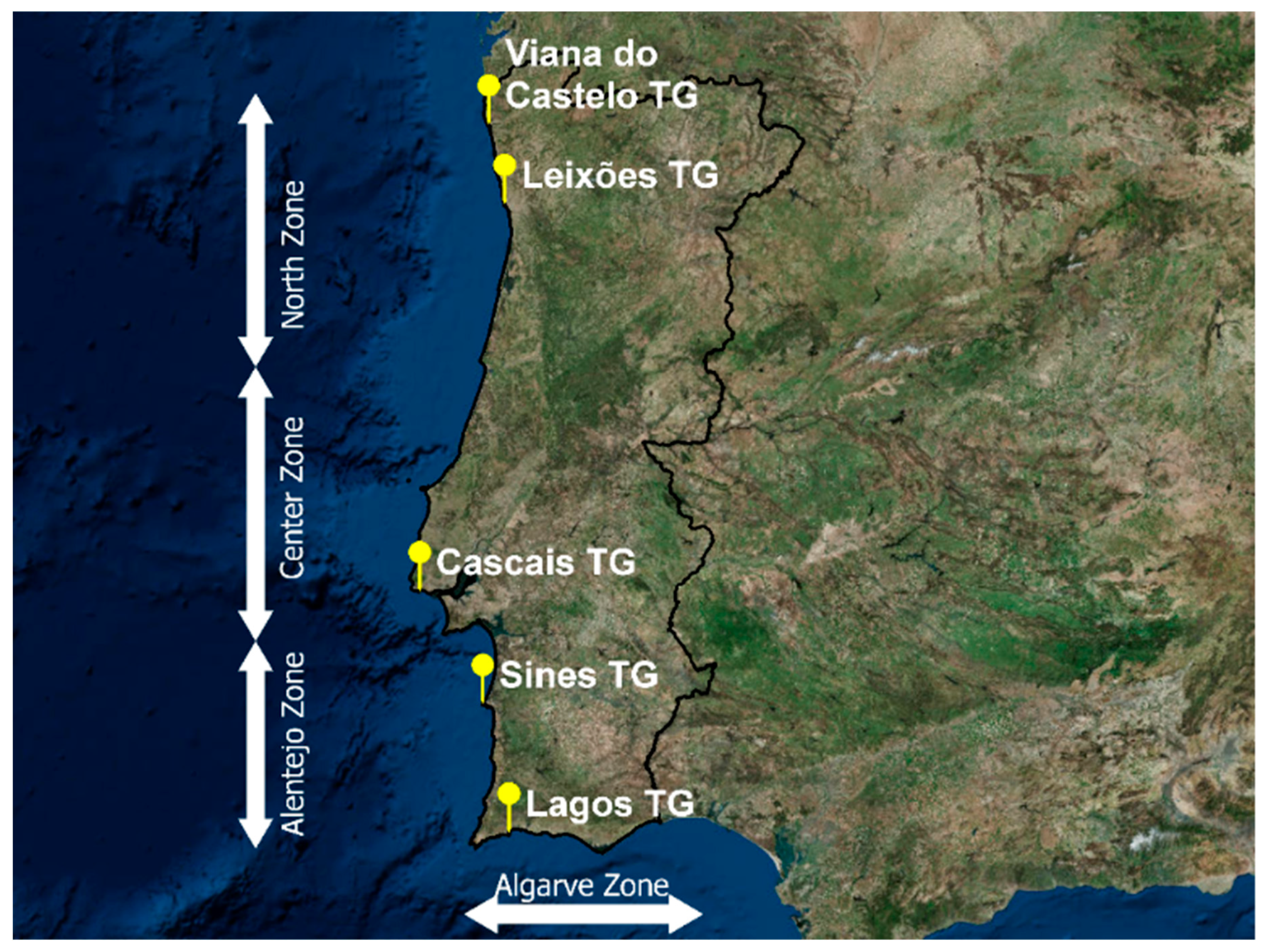
In order to improve the computational performance of altimetric data processing, four different geographical zones were separately considered and the corresponding altimetric grid resampled at 20 m spatial resolution (
Figure 2): North (from Viana do Castelo to Figueira da Foz), Center (from Figueira da Foz to Cabo Espichel), Alentejo (from Sesimbra to Cabo de São Vicente) and Algarve (from Sagres to Vila Real Santo António) (
Table 3). This partition became also an advantage for the coastal forcing computation, since there are different estimate scenarios for each zone with the combination of Portuguese Atlantic coast SLR and the respective tide model, SS, and wave setup estimations.
The positional quality control is indispensable in the production of flooding cartography due to the respective impact of an incorrect risk assessment. The DTM was produced by photogrammetry and, despite being a very efficient and accurate method, it is not free of errors. The respective data set was generated from raw data through filtering, by the classification of points into “soil” and “non-soil” and by interpolation to fill the gaps. Errors may still occur during post-processing of the data. Therefore, quality control should detect errors and deviations; however, it is very difficult to link certain errors (or their magnitude) to a concrete cause to be able to eliminate them [
24].
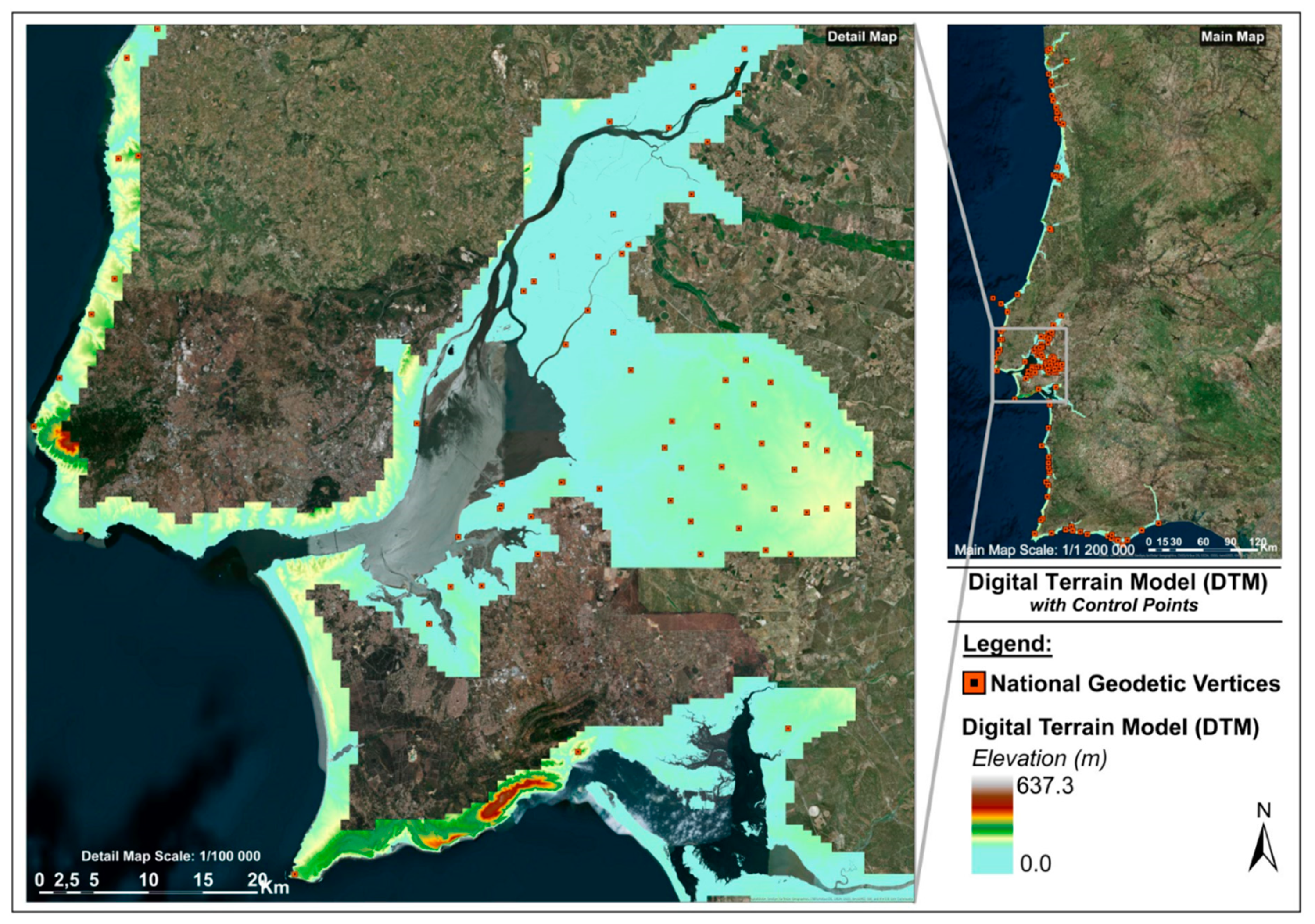
In this regard, the validation of the DTM was done based on a set of ground control points, in a total of 134 national geodetic marks, for which the altimetric values (orthometric base height—
HGV) are known and hence differences from the photogrammetric DTM heights (
hDTM) can be estimated:
An overall mean square error of 56 cm was estimated with a sample of 134 control points for the entire coastal area. No shift, based on the obtained residual mean, was applied to the DTM, because the sample did not exhibit a normal random distribution due to the presence of large residuals. Finally, the obtained DTM (
Figure 4), for the whole coastal zone of Portugal’s mainland, shows values between 0 m and 637.3 m with a spatial resolution of 20 m and with 56 cm of relative accuracy (precision).
2.2.2. Methodology for the Probabilistic Cartography
For the SLR hazard determination, vulnerability, and risk assessment, most of work done and published is based on the deterministic flooding cartography approach [
13,
14,
15]. However, there are many unknowns when mapping future flood scenarios, including the evolution of coastal landforms (by erosion or sedimentation, or even man-made for building and protection), as well as the data used to produce the topographic models and to predict flooding levels. Partly based on the mapping confidence of [
15], the present developed methodology is an innovative approach to produce the probabilistic cartography of different SLR scenarios, with different extreme event RPs and maximum tide levels.
Tide models were estimated based on historical data from the Leixões, Cascais, Sines, and Lagos TGs. Thus, each national wide scenario is a composition of four territorial zones: North, Center, Alentejo, and Algarve. Except for the Cascais TG, which has the longest tide series, all the other TGs (Leixões, Sines, and Lagos) have shorter and incomplete data series for the 1970–2010 period.
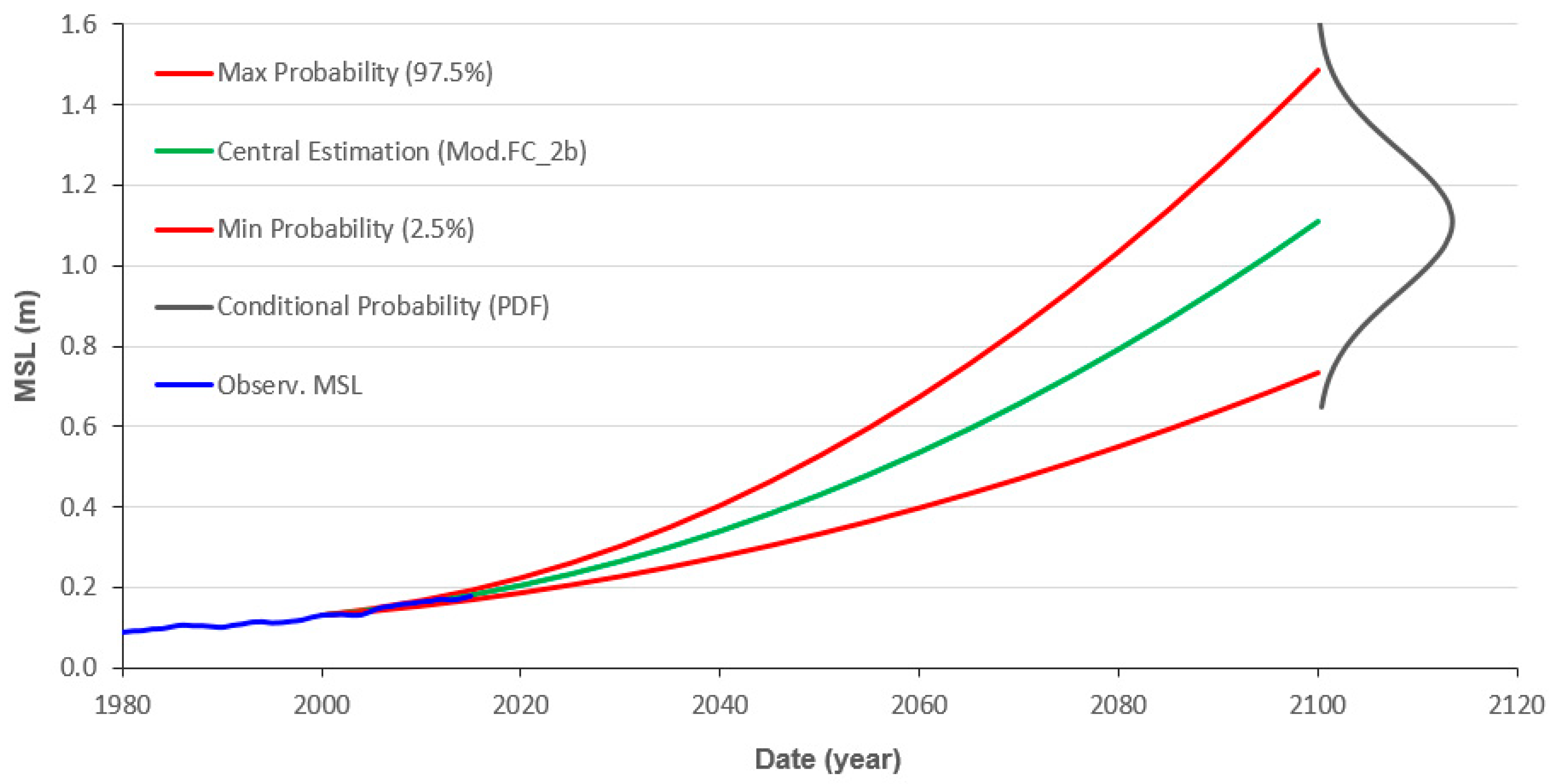
Considering the ACPM SLR projection (
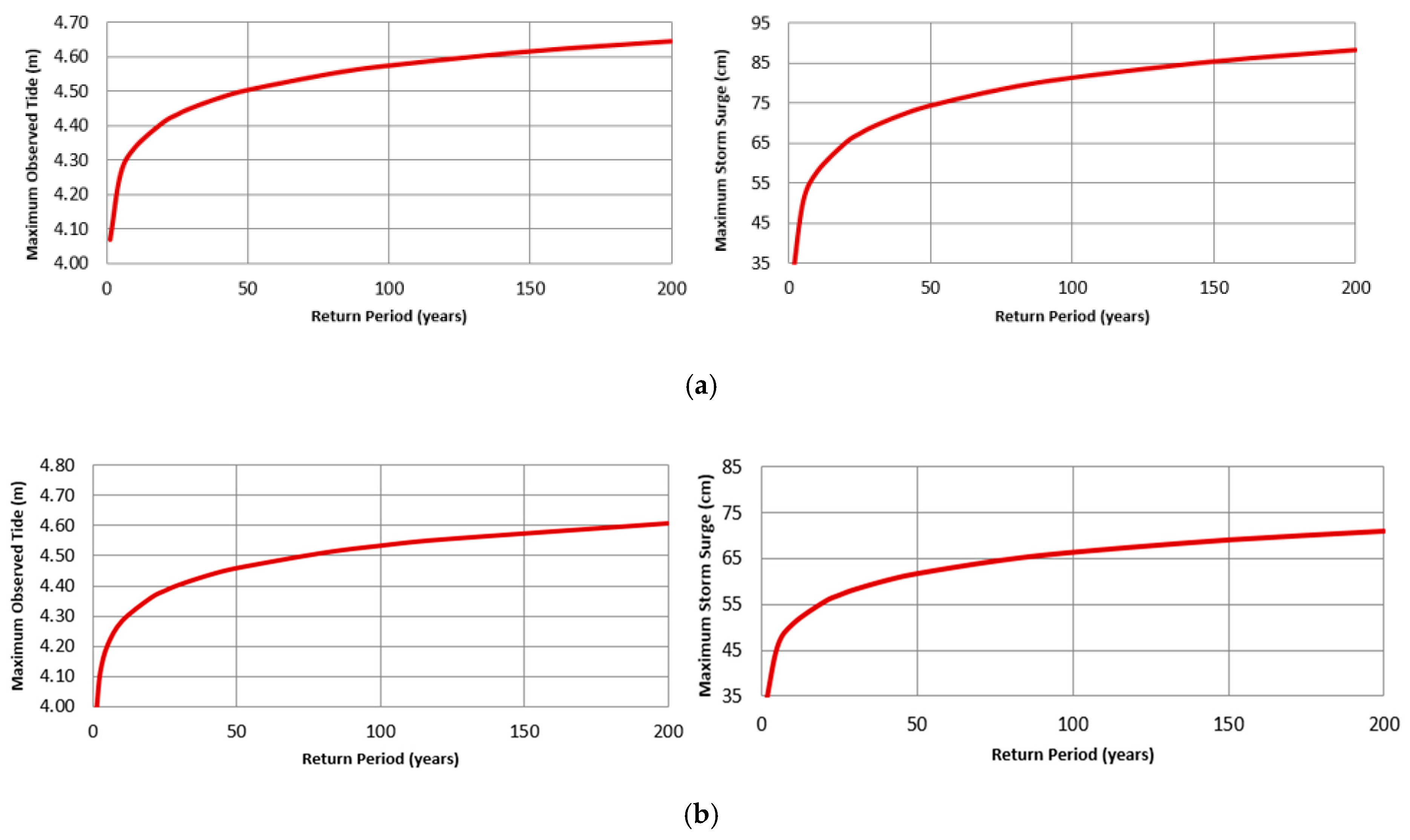
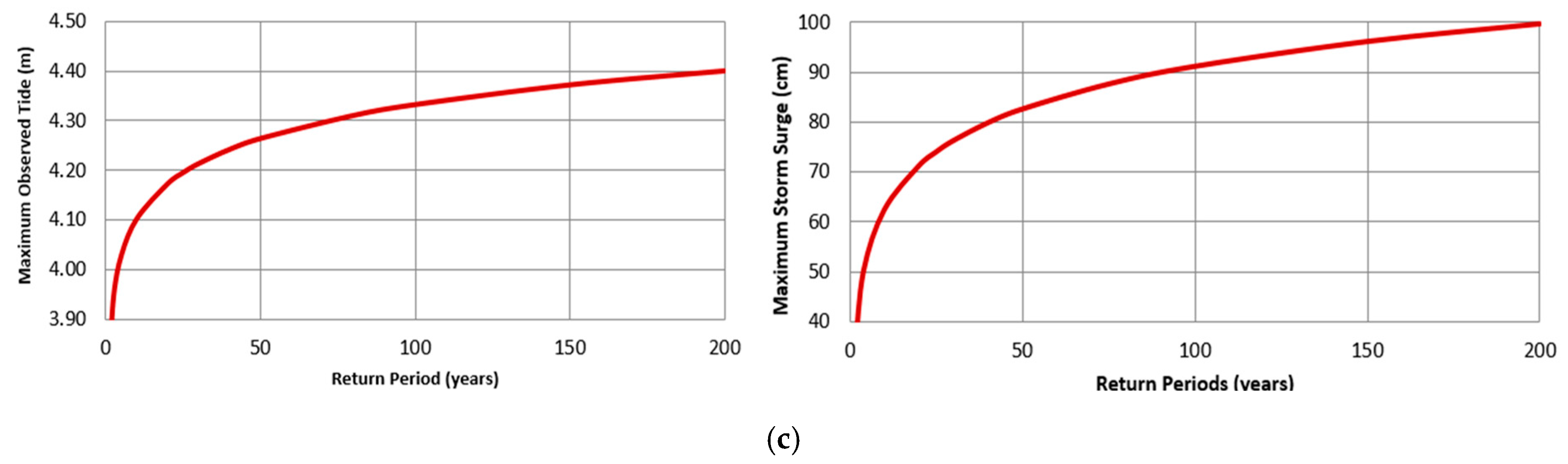
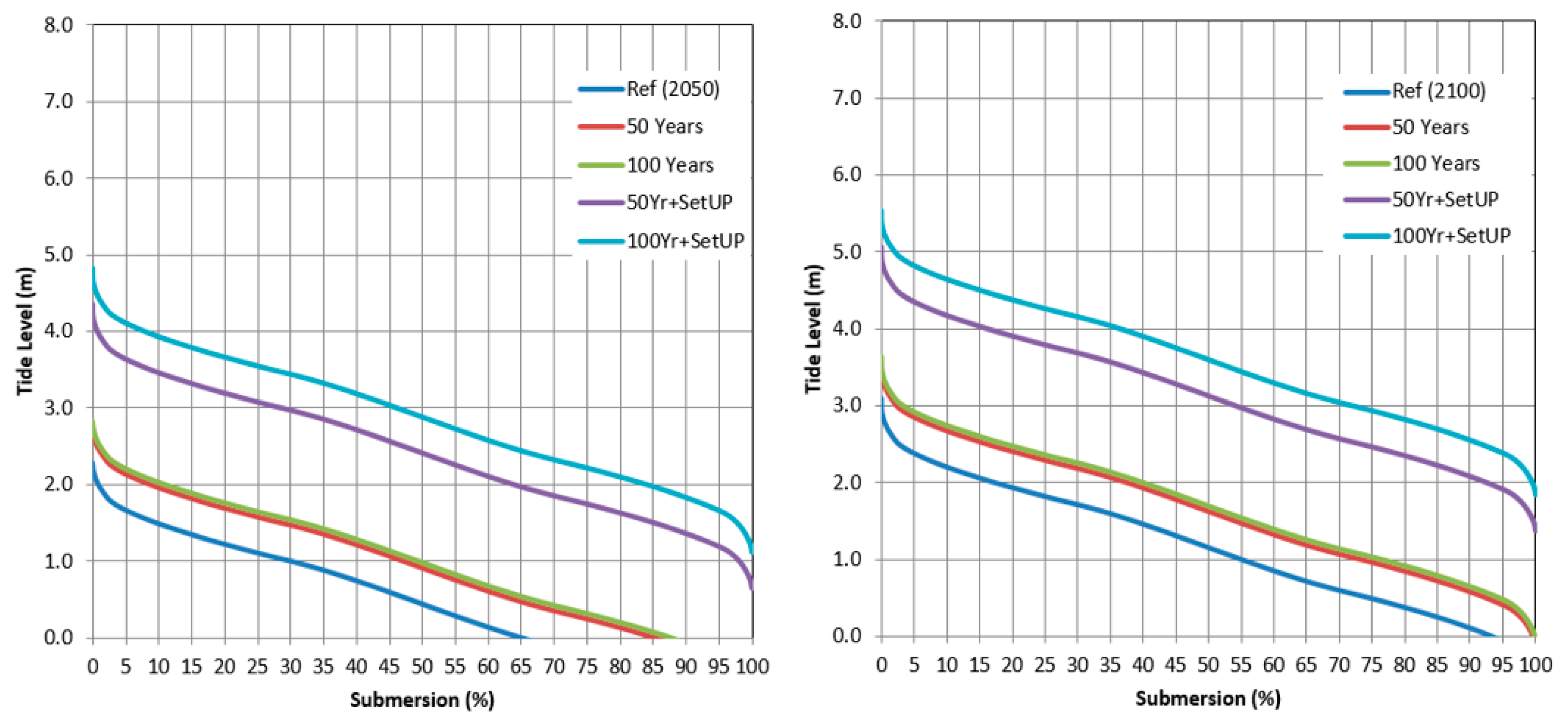
Figure 1) and the tide models, the tide submersion percentiles were computed for the two epochs under study, that is, 2050 and 2100. Adding the storm surge effect for two RPs considered (50 and 100 years), as well as wave setup, to the predicted tide level submersion frequency for each reference TG, the extreme flood levels (EFLs) are defined by the two Equations (8) and (9).
From the annual submersion percentile curve estimation, equivalent to the tide cumulative density function (shown in
Figure 5 only for the case of Cascais, which is identical to the other TGs), the elevations for the extreme flooding levels (EFL central estimation) corresponding to the spring high-tide average were obtained using the 0.25% percentile of submersion tide level. From the percentile curves of
Figure 5, for each EFL scenario, with or without additional storm surge and setup effects, the 0.25% percentile corresponds to an extreme tide level. With SLR, these extreme levels will cause flooding on coastal lowlands.
The developed probabilistic methodology for flooding cartography is mainly based on the uncertainties of the EFL unknowns, such as the SLR, prediction tide and storm surge uncertainties. Gesch [
14] and Marcy et al. [
15] used the same concept to produce the flooding map confidence, but only applying the uncertainty of the DTM. The present methodology could have also included the DTM uncertainty for the sake of a better probabilistic estimation. However, for this national case study only EFL uncertainties were considered, due mainly to the low confidence of the error mean square root estimation for the whole coastal DTM with only more than one hundred control points from the National Geodetic Network. Other studies, carried out at the local scale for the Portuguese municipality contracts, have considered the total uncertainties of the unknowns, including DTM with local control points. For this reason, one can say that the present EFL probability estimation and respective flooding cartography is underestimated.
The flooding hazard of a certain location for a given flood level increases with decreasing terrain height, since it returns higher water columns and higher flooding. On the other hand, due to the EFL uncertainty, the flooding occurrence probability in a certain location for a given flood level is also higher in terrain below EFL and lower in terrain above EFL. Therefore, contrary to the usual natural hazard probability, in which higher hazard has a low occurrence probability and vice versa (such as the storm surge or SLR itself), in this case high flooding hazard corresponds to a high occurrence probability and low flooding hazard corresponds to a low occurrence probability (
Table 4).
To incorporate the EFL of each SLR scenario and their uncertainties (e.g., from
Figure 1) into the further vulnerability and risk assessment, the Extreme Flood Hazard Index (EFHI) has been defined with five hazard classes (
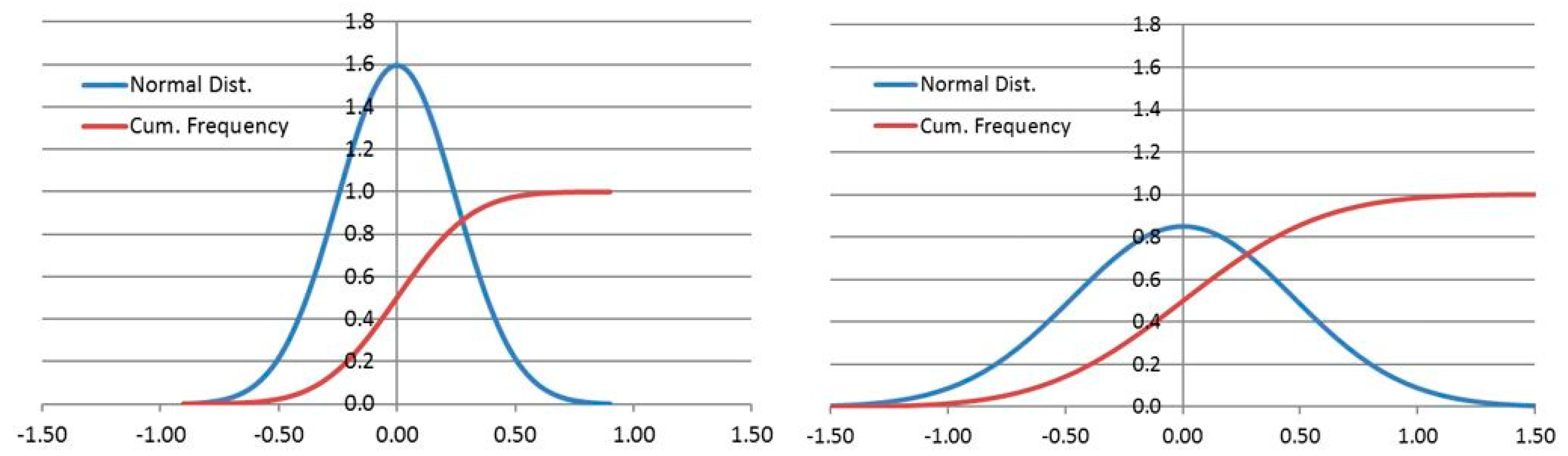
Table 4) ranging from 1 (low hazard with low probability) to 5 (extreme hazard with high probability). The EFHI is then calculated by considering the uncertainty of the submersion frequency models, which result from the tide standard deviation estimations of tides, storm surge RP, and SLR. Therefore, by variance propagation using Equations (8) and (9), the uncertainty of extreme flood scenario is evaluated by the following:
The uncertainty value of each scenario depends on the SLR projection epoch. Therefore, the scenario EFL
1standard deviation values obtained for the 2050 and 2100 epochs were 12 and 40 cm, respectively. Based on these uncertainties estimated by Equation (10), the standard error distribution for a certain extreme flood scenario is determined (
Figure 6).
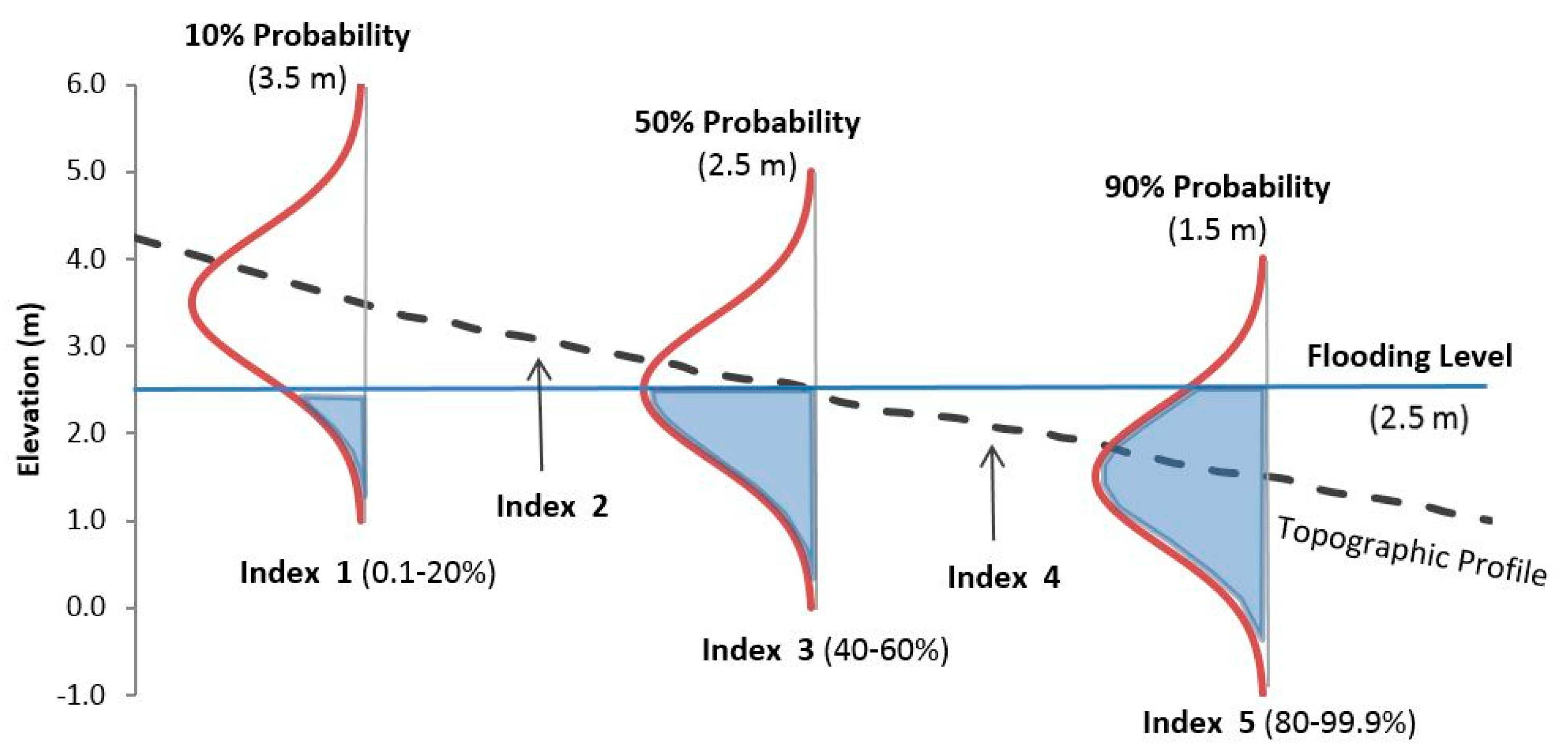
The respective standard error distribution being associated with the flooding level uncertainty should be centered at the EFL and intersected to the topographic profile to estimate the probability. However, the probability determined by such an approach would correspond to the given EFL exceeding probability at a certain topographic profile location. Therefore, instead of centering the respective normal distribution function at the EFL, it is centered rather at the topographic profile (
Figure 7) to evaluate the EFL occurrence probability in a certain topographic location for a given flood level. Since the EFL is conditioned by a given SLR projection scenario, the respective probability corresponds to a conditional probability.
This normal distribution function has a conditional flood probability for the dimension of the topographic profile, which enables the determination of the probabilistic flood level for different topographic locations around the deterministic flood level (inundation level minus central projection of sea level). Subdividing the probability domain into five intervals of 20%, the EFHI is defined by a five-class range, from 1 (lowest probability, from 0.1 to 20%) to 5 (maximum probability, from 80 to 99.9%), related to coastal forcing (
Table 4) and flooding hazard level.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}