Locating Cave Entrances Using Lidar-Derived Local Relief Modeling

Abstract
1. Introduction
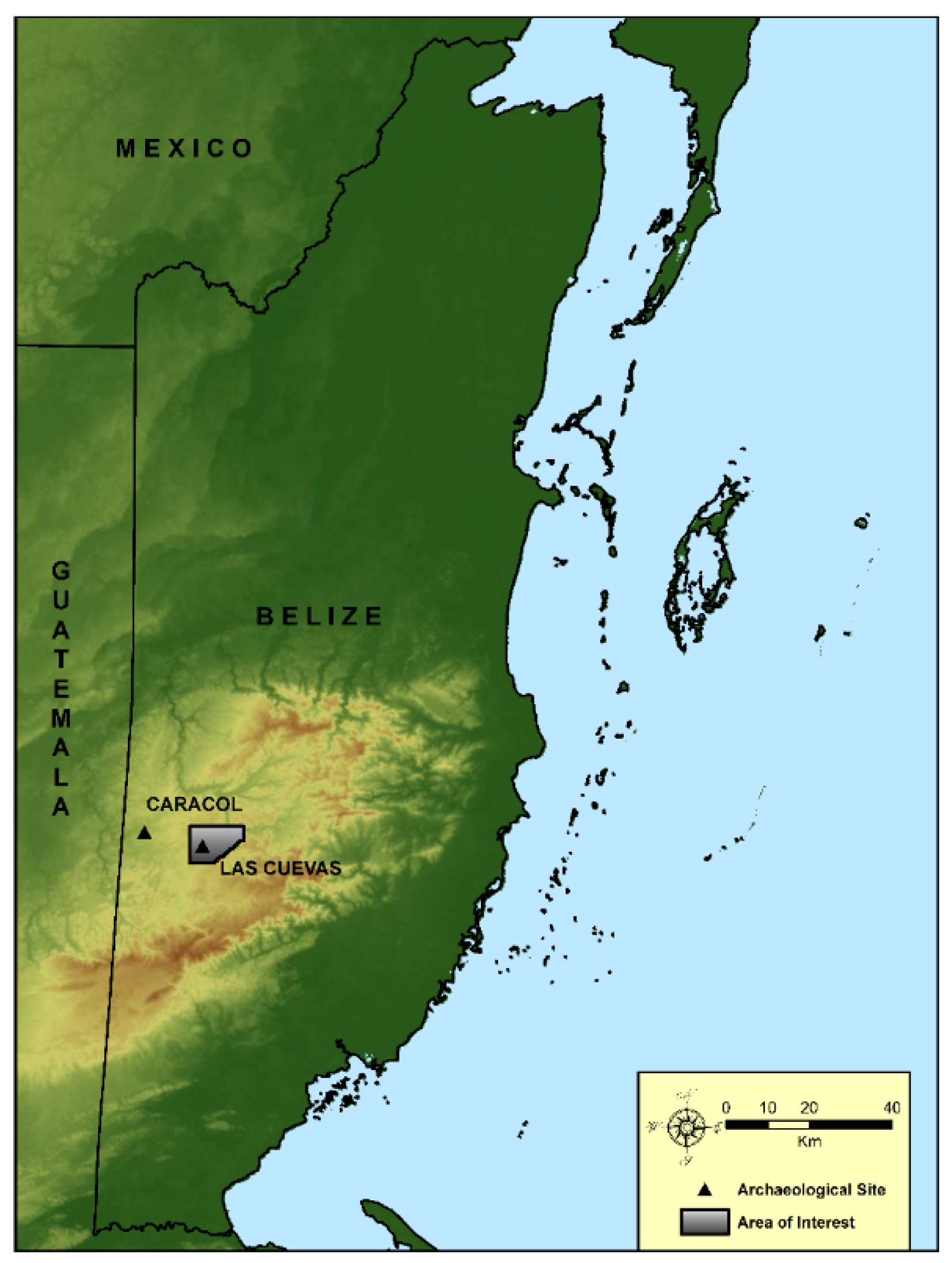
Setting: Geology and Karstic Background
2. Methods
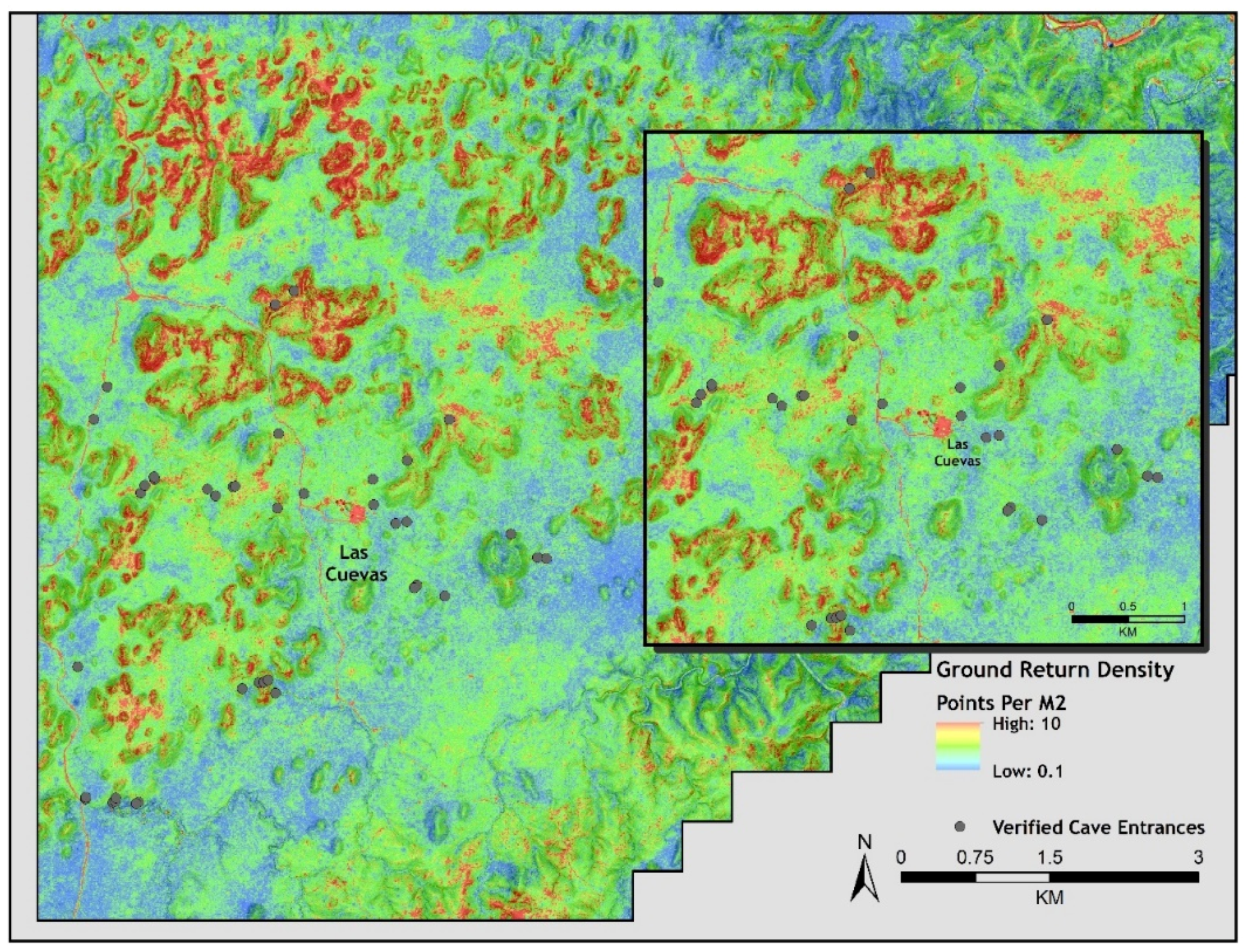
Analysis of Remotely Detected Cave Entrances
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Minty, C.; Bridgewater, S. Introduction. In A Natural History of Belize: Inside the Maya Forest; University of Texas Press: Austin, TX, USA, 2012; ISBN 9780292726710. [Google Scholar]
- Kidder, A. Five Days over the Maya Country. Sci. Mon. 1930, 30, 193–205. [Google Scholar]
- Saturno, W.; Sever, T.L.; Irwin, D.E.; Howell, B.F.; Garrison, T.G.; Wiseman, J.R.; El-Baz, F. Putting Us on the Map: Remote Sensing Investigation of the Ancient Maya Landscape. In Remote Sensing in Archaeology; Wiseman, J., El-Baz, F., Eds.; Springer: New York, NY, USA, 2007; pp. 137–160, ISBN-10: 038744615X. [Google Scholar]
- Sever, T.L.; Irwin, D.E. Landscape archaeology: Remote-sensing investigation of the ancient Maya in the Peten rainforest of northern Guatemala. Anc. Mesoam. 2003, 14, 113–122. [Google Scholar] [CrossRef]
- Blumberg, D.H.; Neta, T.; Margalit, N.; Lazar, M.; Freilikher, V. Mapping exposed and buried drainage systems using remote sensing in the Negev Desert, Israel. Geomorphology 2004, 61, 239–250. [Google Scholar] [CrossRef]
- Breeze, P.S.; Drake, N.A.; Groucutt, H.S.; Parton, A.; Jennings, R.P.; White, T.S.; Clark-Balzan, L.; Shipton, C.; Scerri, E.M.L.; Stimpson, C.M.; et al. Remote sensing and GIS techniques for reconstructing Arabian palaeohydrology and identifying archaeological sites. Quart. Int. 2015, 382, 98–119. [Google Scholar] [CrossRef]
- Hritz, C. Contribution of GIS and Satellite-Based Remote Sensing to Landscape Archaeology in the Middle East. J. Archaeol. Res. 2014, 22, 229–276. [Google Scholar] [CrossRef]
- Parcak, S. Satellite Remote Sensing Methods for Monitoring Archaeological Tells in the Middle East. J. Field Archaeol. 2007, 32, 65–81. [Google Scholar] [CrossRef]
- Chase, A.F.; Chase, D.Z.; Weishampel, J.F. Lasers in the Jungle: Airborne sensors reveal a vast Maya landscape. Archaeology 2010, 63, 27–29. [Google Scholar]
- Chase, A.F.; Chase, D.Z.; Fisher, C.T.; Leisz, S.; Weishampel, J.F. Geospatial Revolution and Remote Sensing Lidar in Mesoamerican Archaeology. Proc. Natl. Acad. Sci. USA 2012, 109, 12916–12921. [Google Scholar] [CrossRef]
- Chase, A.F.; Chase, D.Z.; Awe, J.J.; Weishampel, J.F.; Iannone, G.; Moyes, H.; Jaeger, J.; Brown, K.M. The Use of LiDAR in Understanding the Ancient Maya Landscape. Adv. Archaeol. Pract. A J. Soc. Am. Archaeol. 2014, 2, 208–221. [Google Scholar] [CrossRef]
- Chase, A.F.; Chase, D.Z.; Awe, J.J.; Weishampel, J.F.; Iannone, G.; Moyes, H.; Jaeger, J.; Brown, K.M.; Shrestha, R.; Carter, W.; et al. Ancient Maya Regional Settlement and Inter-Site Analysis: The 2013 West-Central Belize Lidar Survey. Remote Sens. New Perspect. Remote Sens. Archaeol. 2014, 6, 8671–8695. [Google Scholar] [CrossRef]
- Gallagher, J.M.; Josephs, R.L. Using Lidar to detect cultural resources in a forested environment: An example from Isle Royale National Park, Michigan, USA. Archaeol. Prospect. 2008, 15, 187–206. [Google Scholar] [CrossRef]
- Hofton, M.A.; Rocchio, L.E.; Blair, J.B.; Dubayah, R. Validation of vegetation canopy lidar sub-canopy topography measurements for a dense tropical forest. J. Geodyn. 2002, 34, 491–502. [Google Scholar] [CrossRef]
- Weishampel, J.F.; Blair, J.B.; Dubayah, R.; Clark, D.B.; Knox, R.G. Canopy topography of an old-growth tropical rainforest landscape. Selbyana 2000, 21, 79–87. [Google Scholar]
- Weishampel, J.F.; Blair, J.B.; Knox, R.G.; Dubayah, R.; Clark, D.B. Volumetric lidar return patterns from an old-growth tropical rainforest canopy. Int. J. Remote Sens. 2000, 21, 409–415. [Google Scholar] [CrossRef]
- Sittler, B. Revealing Historical Landscapes by Using Airborne Laser Scanning: A 3-D Model of Ridge and Furrow in Forests near Rastatt, Germany. In Proceedings of the Natscan, Laser-Scanners for Forest and Landscape Assessment–Instruments, Processing Methods and Applications, Freiburg im Breisgau, Germany, 3–6 October 2004; Thies, M., Koch, B., Spiecker, H., Weinacker, H., Eds.; International Archives of Photogrammetry and Remote Sensing: Freiburg im Breisgau, Germany, 2004; Volume XXXVI, Part 8/W2. pp. 258–261. [Google Scholar]
- Sherwood, S.C.; Goldberg, P. A Geoarchaeological Framework for the Study of Karstic Cave Sites in the Eastern Woodlands. Midcont. J. Archaeol. 2001, 26, 145–168. [Google Scholar]
- Straus, L.G. Underground Archaeology: Perspectives on Caves and Rockshelters. In Archaeological Method and Theory; Schiffer, M.B., Ed.; University of Arizona Press: Tucson, AZ, USA, 1990; Volume 2, pp. 255–304. ISBN 9780120031023. [Google Scholar]
- Woodward, J.C.; Goldberg, P. The Sedimentary Records in Mediterranean Rockshelters and Caves: Archives of Environmental Change. Geoarchaeology 2001, 16, 327–354. [Google Scholar] [CrossRef]
- Moyes, H.; Brady, J.E. Caves as Sacred Space in Mesoamerica. In Sacred Darkness: A Global Perspective on the Ritual Use of Caves; Moyes, H., Ed.; University Press of Colorado: Boulder, CO, USA, 2012; pp. 151–170. ISBN 9781607323600. [Google Scholar]
- Nicolay, S. Footsteps in the Dark Zone: Ritual Cave Use in Southwest Prehistory. In Sacred Darkness: A Global Perspective on the Ritual Use of Caves; Moyes, H., Ed.; University Press of Colorado: Boulder, CO, USA, 2012; pp. 171–184. ISBN 9781607323600. [Google Scholar]
- Moyes, H.; Kosakowsky, L.; Ray, E.; Awe, J.J. The Chronology of Ancient Maya Cave Use in Belize. Research Reports in Belizean Archaeology; Institute of Archaeology, NICH: Belmopan, Belize, 2017; pp. 327–338. [Google Scholar]
- Brown, L. Planting the Bones: Hunting Ceremonialism at Contemporary and Nineteenth-Century Shrines in the Guatemalan Highlands. Lat. Am. Antiq. 2005, 16, 131–146. [Google Scholar] [CrossRef]
- Scott, A.M. Communicating with the Sacred Earthscape: An Ethnoarchaeological Investigation of Kaqchikel Maya Ceremonies in Highland Guatemala. Ph.D. Dissertation, Department of Anthropology, University of Texas, Austin, TX, USA, 2009. [Google Scholar]
- White, W.B.; Culver, D.C. Definition of Cave. In Encyclopedia of Caves; White, W.B., Culver, D.C., Eds.; Academic Press: Burlington, MA, USA, 2012; pp. 103–107. ISBN 978-0123838322. [Google Scholar]
- Klimchouk, A. Caves. In Encyclopedia of Caves and Karst Science; Gunn, J., Ed.; Fitzroy Dearborn: New York, NY, USA, 2004; pp. 417–421. ISBN 9781579583996. [Google Scholar]
- Casati, R.; Varzi, A.C. Holes and Other Superficialities; MIT Press: Cambridge, MA, USA, 1994; ISBN 9780262032117. [Google Scholar]
- Moyes, H.; Montgomery, S. Mapping ritual landscapes using lidar: Cave detection through local relief modeling. Adv. Archaeol. Pract. 2016, 4, 249–267. [Google Scholar] [CrossRef]
- Rinker, J.N. Airborne infrared thermal detection of caves and crevasses. Photogramm. Eng. Remote Sens. 1975, 44, 1391–1400. Available online: https://www.asprs.org/wp-content/uploads/pers/1975journal/nov/1975_nov_1391-1400.pdf (accessed on 25 November 2018).
- Wynne, J.J.; Titus, T.N.; Diaz, D.C. On developing thermal cave detection techniques for earth, the moon and mars. Earth Planet. Sci. Lett. 2008, 272, 240–250. [Google Scholar] [CrossRef]
- Cooper, A.H. Airborne multispectral scanning of subsidence caused by Permian gypsum dissolution at Ripon, North Yorkshire. Q. J. Eng. Geol. Hydrogeol. 1989, 22, 219–229. [Google Scholar] [CrossRef]
- Beard, L.P.; Nyquist, J.E.; Carpenter, P.J. Detection of karst structures using airborne EM and VLF. In SEG Technical Program Expanded Abstracts 1994; Society of Exploration Geophysicists: Tulsa, OK, USA, 1994; pp. 555–558. [Google Scholar] [CrossRef]
- Gutierrez, F.; Cooper, A.H.; Johnson, K.S. Identification, Prediction, and Mitigation of Sinkhole Hazards in Evaporite Karst Areas. Environ. Geol. 2008, 53, 1007–1022. [Google Scholar] [CrossRef]
- Kobal, M.; Bertoncelj, I.; Pirotti, F.; Dakskobler, I.; Kutnar, L. Using Lidar Data to Analyse Sinkhole Characteristics Relevant for Understory Vegetation under Forest Cover-Case Study of a High Karst Area in the Dinaric Mountains. PLoS ONE 2015, 10, e0122070. [Google Scholar] [CrossRef] [PubMed]
- Miao, X.; Qiu, X.; Wu, S.S.; Luo, J.; Gouzie, D.R.; Xie, H. Developing efficient procedures for automated sinkhole extraction from lidar DEMs. Photogramm. Eng. Remote Sens. 2013, 79, 545–554. [Google Scholar] [CrossRef]
- Wu, Q.; Deng, C.; Chen, Z. Automated delineation of karst sinkholes from LiDAR-derived digital elevation models. Geomorphology 2016, 266, 1–10. [Google Scholar] [CrossRef]
- Weishampel, J.F.; Hightower, J.N.; Chase, A.F.; Chase, D.Z.; Patrick, R.A. Lidar Detection and Characterization of Karst Depressions. J. Cave Karst Stud. 2011, 3, 187–196. [Google Scholar] [CrossRef]
- Weishampel, J.F.; Hightower, J.N.; Chase, A.F.; Chase, D.Z. Remote sensing of below-canopy land use features from the Maya polity of Caracol. In Understanding Landscapes: From Discovery through Land Their Spatial Organization; Caracol Archaeological Project, Deptartment of Anthropology, University of Las Vegas: Las Vegas, NV, USA, 2013; pp. 131–136. Available online: http://www.caracol.org/wp-content/uploads/2016/05/WeishampelEtAl2013.pdf (accessed on 12 November 2018).
- Zhu, J.; Taylor, T.P.; Currens, J.C.; Crawford, M.M. Improved Karst Sinkhole Mapping in Kentucky using LiDAR Techniques: A Pilot Study in Floyds Fork Watershed. J. Cave Karst Stud. 2014, 76, 207–216. [Google Scholar] [CrossRef]
- Awe, J.J. The Western Belize Regional Cave Project: Objectives, Context, and Problem Orientation. In The Western Belize Regional Cave Project: A Report of the 1997 Field Season; Awe, J.J., Ed.; University of New Hampshire, Department of Anthropology Occasional: Durham, NH, USA, 1998; pp. 1–22. [Google Scholar]
- Moyes, H. Cluster Concentrations, Boundary Markers, and Ritual Pathways: A GIS Analysis of Artifact Cluster Patterns at Actun Tunichil Muknal, Belize. In The Maw of the Earth Monster: Mesoamerican Ritual Cave Use; Brady, J.E., Prufer, K.M., Eds.; University of Colorado Press: Boulder, CO, USA, 2005; pp. 269–300, ISBN-13: 9780292705869. [Google Scholar]
- 43 Moyes, H.; Awe, J.J.; Brook, G.; Webster, J. The Ancient Maya Drought Cult: Late Classic Cave Use in Belize. Lat. Am. Antiq. 2009, 20, 175–206. [Google Scholar] [CrossRef]
- Colas, P.R.; Reeder, P.; Webster, J. The Ritual Use of a Cave on the Northern Vaca Plateau, Belize, Central America. J. Cave Karst Stud. 2000, 62, 6–10. [Google Scholar]
- Moyes, H.; Robinson, M.; Voorhies, B.; Kosakowsky, L.; Arksey, M.; Ray, E.; Hernandez, S. Dreams at Las Cuevas: A Location of High Devotional Expression of the Late Classic Maya; Research Reports in Belizean Archaeology; Institute of Archaeology, NICH: Belmopan, Belize, 2015; Volume 12, pp. 239–249. [Google Scholar]
- Bridgewater, S. A Natural History of Belize: Inside the Maya Forest; University of Texas Press: Austin, TX, USA, 2012; pp. 96–99. ISBN 9780292726710. [Google Scholar]
- Bateson, J.H.; Hall, I.H.S. The Geology of the Maya Mountains, Belize; HM Stationery Office, London.: London, UK, 1977; Volume 3, ISBN 978-0118807654. [Google Scholar]
- Miller, T.E. Geologic and hydrologic controls on karst and cave development in Belize. J. Cave Karst Stud. 1996, 58, 100–120. [Google Scholar]
- Vinson, G.L. Upper Cretaceous and Tertiary Stratigraphy in Guatemala. Bull. Am. Assoc. Petr. Geol. 1962, 46, 425–465. [Google Scholar]
- Miller, T.E. Inside Chiquibul. Natl. Geogr. 2000, 197, 54–71. [Google Scholar]
- Feld William, A. The Caves of Caracol: Initial Impressions. In Studies in the Archaeology of Caracol, Belize; Chase, D.Z., Chase, A.F., Eds.; Pre-Columbian Art Research Institute Monograph 7; PARI: San Francisco, CA, USA, 1994; pp. 76–82. [Google Scholar]
- Reeder, P.; Brinkmann, R.; Alt, E. Karstification on the northern Vaca plateau, Belize. J. Cave Karst Stud. 1996, 58, 121–130. [Google Scholar]
- Benson, R.C.; Yuhr, L.B. Site Characterization in Karst and Pseudokarst Terraines: Practical Strategies and Technology for Practicing Engineers, Hydrologists and Geologists; Springer: New York, NY, USA, 2015; pp. 16–25. ISBN 9789401799232. [Google Scholar]
- Williams, P.; Gunn, J. Dolines. In The Encyclopedia of Caves and Karst Science; Gunn, J., Ed.; Fitzroy Dearborn: New York, NY, USA, 2003; pp. 304–310. ISBN 9781579583996. [Google Scholar]
- Gatziolis, D.; Andersen, H.E. A Guide to LIDAR Data Acquisition and Processing for the Forests of the Pacific Northwest; Gen. Tech. Rep. PNW-GTR-768; US Department of Agriculture, Forest Service, Pacific Northwest Research Station: Portland, OR, USA, 2008; p. 768. ISBN 9781508770954. Available online: https://www.fs.fed.us/pnw/pubs/pnw_gtr768.pdf (accessed on 19 November 2018).
- Kokalj, Z.; Hesse, R. Airborne Laser Scanning Raster Data Visualization—A Guide to Good Practice; Založba ZRC: Ljubljana, Slovenia, 2017; ISBN 9789612549848. [Google Scholar]
- Brassel, K.E.; Little, J.; Peucker, T.K. Automated Relief Representation. Ann. Assoc. Am. Geogr. 1974, 64, 610–611. Available online: https://www.jstor.org/stable/2569517 (accessed on 19 November 2018).
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-View Factor as a Relief Visualization Technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef]
- Yokoyama, R.; Shirasawa, M.; Pike, R.J. Visualizing topography by openness: A new application of image processing to digital elevation models. Photogramm. Eng. Remote Sens. 2002, 68, pp. 257–266. Available online: https://pdfs.semanticscholar.org/c3d9/a561fdb9e8c34a2b79152aea72b46090bb2e.pdf (accessed on 19 November 2018).
- Hesse, R. Visualisierung Hochauflösender Digitaler Geländemodelle Mit LiVT. In Computeranwendungen Und Quantitative Methoden in Der Archäologie. 4; Workshop Der AG CAA 2013; Lieberwirth, U., Herzog, I., Eds.; Berlin Studies of the Ancient World: Berlin, Germany, 2016; pp. 109–128. [Google Scholar]
- Doctor, D.H.; Young, J.A. An Evaluation of Automated GIS Tools for Delineating Karst Sinkholes and Closed Depressions from 1-m LiDAR Derived Digital Elevation Data. In Proceedings of the 13th Multidisciplinary Conference on Sinkholes and the Engineering and Environmental Impacts of Karst, NCKRI SYMPOSIUM 2, Carlsbad, NM, USA, 6–10 May 2013; Land, L., Doctor, D.H., Stephenson, J.B., Eds.; National Cave and Karst Research Institute: Carlsbad, NM, USA, 2013; pp. 449–458. [Google Scholar]
- Hesse, R. LiDAR-derived Local Relief Models—A new tool for archaeological prospection. Archaeol. Prospect. 2010, 17, 67–72. [Google Scholar] [CrossRef]
- Novák, D. Local Relief Model (LRM) Toolbox for ArcGIS. Electronic Document. 2014. Available online: http://www.academia.edu/5618967/Local_Relief_Model_LRM_Toolbox_for_ArcGIS_UPDATE_2014-10-7 (accessed on 12 November 2018).
- Hare, T.; Masson, M.; Russell, B. High-Density LiDAR Mapping of the Ancient City of Mayapan. Remote Sens. 2014, 6, 9064–9085. [Google Scholar] [CrossRef]
- Hutson, S.R. Adapting LiDAR Data for Regional Variation in the tropics: A case study from the Northern Maya Lowlands. J. Archaeol. Sci. 2015, 4, 252–263. [Google Scholar] [CrossRef]
- Prufer, K.M.; Thompson, A.E.; Kennett, D.J. Evaluating Airborne LiDAR for Detecting Settlements and Modified Landscapes in Disturbed Tropical Environments at Uxbenka. Belize. J. Archaeol. Sci. 2015, 57, 1–13. [Google Scholar] [CrossRef]
- Reese-Taylor, K.; Hernández, A.A.; Esquivel, F.C.A.F.; Monteleone, K.; Uriarte, A.; Carr, C.; Acuña, H.G.; Fernandez-Diaz, J.C.; Peuramaki-Brown, M.; Dunning, N. Boots on the Ground at Yaxnohcah: Ground-Truthing Lidar in a Complex Tropical Landscape. Adv. Archaeol. Pract. 2016, 4, 314–338. [Google Scholar] [CrossRef]
- Yaeger, J.; Brown, M.J.; Cap, B. Locating and Dating Sites Using Lidar Survey in a Mosaic Landscape in Western Belize. Adv. Archaeol. Pract. 2016, 4, 339–356. [Google Scholar] [CrossRef]
- Rosenswig, R.M.; López-Torrijos, R.; Antonelli, C.E.; Mendelsohn, R.R. Lidar Mapping and Surface Survey of the Izapa State on the Tropical Piedmont of Chiapas, Mexico. J. Archaeol. Sci. 2013, 40, 1493–1507. [Google Scholar] [CrossRef]
- Crow, P.; Benham, S.; Devereux, B.J.; Amable, G.S. Woodland Vegetation and Its Implications for Archaeological Survey Using LiDAR. Forestry 1989, 80, 241–252. [Google Scholar] [CrossRef]
- Pendergast, D.M. Excavations at Eduardo Quiroz Cave, British Honduras (Belize); Toronto, Royal Ontario Museum, Art and Archaeology Occasional: Toronto, ON, Canada, 1971. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey 1—Cave Openings Suveyed Opportunistically | ||||||||
| Cave Name | Cave_ID | Cave_Type | Size | Max Width of Opening (m) | Max Sink Depth/Hor Ent Ht (m) | Topography | Verified | Artifacts Present |
| Actun Uo | B03_C02 | Inflow_Drain | Small | 0.7 | 1 | Valley | Yes | No |
| Actun Uo | B03_C01 | Inflow_Drain | Small | 1.2 | 2 | Valley | Yes | No |
| Actun Uo Ent 1 | A03_C01 | Hor Ent | Large | 5 | 2.9 | Depression | Yes | Yes |
| Actun Uo Ent 2 | A03_C02 | Hor Ent | Medium | 2.8 | 2 | Depression | Yes | Yes |
| Actun Uo Ent 3 | B03_C03 | Hor Ent | Large | 7.8 | 7.4 | Solution Scarp | Yes | Yes |
| Actun P’ook Ent 1 | E05_C03 | Hor Ent | Large | 16 | 6.5 | Side Slope | Yes | Yes |
| Actun P’ook Ent 2 | E05_C02 | Sink | Large | 60 | 30 | Hill Top | Yes | Yes |
| Actun P’ook Ent 3 | E05_C04 | Hor Ent | Medium | 4.4 | 8 | Side Slope | Yes | Yes |
| Actun P’ook Ent 4 | E05_C06 | Hor Inflow Drain | Large | 14.2 | 11.5 | Slope Base | Yes | Few |
| Actun Miesba | E05_C01 | Sink-Hor Ent | Large | 11.9 | 10 | Side Slope | Yes | Yes |
| Actun Paal | E13_C01 | Hor Ent | Medium | 4.3 | 4 | Side Slope | Yes | Yes |
| Eduardo Quiroz | F13_C01 | Hor Ent | Large | 6 | 7.4 | Side Slope | Yes | Yes |
| Dinoaur Egg Cave | A06_C01 | Inflow_Drain | Large | 17 | 8.7 | Valley | Yes | Yes |
| NA | I07_C01 | Inflow_Drain | Medium | 2.8 | 2.2 | Slope Base | Yes | No |
| NA | K08_C02 | Inflow_Drain | Small | 1 | 0.5 | Valley | Yes | No |
| NA | B03_C04 | Sink | Large | 11 | 2.5 | Side Slope | Yes | No |
| NA | C03_C01 | Sink | Large | 17.5 | 7.2 | Side Slope | Yes | No |
| NA | G09_C02 | Sink | Small | 1.5 | 3.2 | Side Slope | Yes | Few |
| NA | H10_C01 | Sink | Medium | 6 | 5.8 | Side Slope | Yes | No |
| NA | E09_C02 | Sink | Medium | 7.5 | 3 | Valley | Yes | No |
| NA | E10_C02 | Sink | Medium | 5.2 | 7.7 | Valley | Yes | No |
| NA | F09_C01 | Sink | Small | 4 | 3.3 | Valley | Yes | No |
| NA | G09_C03 | Sink | Medium | 5.1 | 3.7 | Depression | Yes | No |
| NA | H07_C01 | Sink | Large | 11.1 | 4.5 | Valley | Yes | Few |
| NA | H07_C02 | Sink | Large | 23 | 4.3 | Valley | Yes | No |
| NA | I11_C01 | Sink | Small | 2.9 | 2.9 | Valley | Yes | No |
| NA | K08_C01 | Hor Ent | Medium | 3.3 | 3.5 | Slope Base | Yes | No |
| NA | E05_C05 | Hor Ent | Small | 4.1 | 6.4 | False Positive | Yes | No |
| NA | E05_C07 | Hor ent | Small | 3.6 | 2.5 | False Positive | Yes | No |
| NA | A05_C03 | Sink | Large | 25 | 5.2 | False Positive | Yes | No |
| Survey 2—Systematic Coverage of Survey Tiles | ||||||||
| Cave Name | Cave_ID | Cave_Type | Size | Max Width of Opening (m) | Max Sink Depth Hor Ent Ht (m) | Topography | Verified | Artifacts Present |
| NA | B11_C03 | Shaft | Small | 0.5 | 5.5 | Valley | Yes | No |
| NA | J08_C01 | Shaft | Small | 1 | 2.3 | Slope Base | Yes | No |
| NA | C09_C03 | Sink | Small | 2.4 | 3.9 | Slope Base | Yes | No |
| NA | C09_C04 | Sink | Small | 2.5 | 2.2 | Valley | Yes | No |
| NA | D09_C02 | Sink | Medium | 5.5 | 7.9 | Valley | Yes | No |
| NA | D09_C04 | Sink | Medium | 6.8 | 5.4 | Valley | Yes | No |
| NA | C09_C01 | Sink | Medium | 7.9 | 5.3 | Valley | Yes | Few |
| NA | D09_C03 | Sink | Medium | 9.1 | 3.5 | Valley | Yes | No |
| NA | B11_C01 | Sink-Hor Ent | Large | 10.5 | 10.5 | Valley | Yes | Few |
| NA | H09_C02 | Sink | Large | 11.5 | 2 | Valley | Yes | No |
| NA | H09_C01 | Sink | Large | 12 | 8 | Valley | Yes | No |
| NA | D09_C05 | Sink | Large | 13 | 6.3 | Valley | Yes | No |
| NA | C09_C02 | Sink-Hor Ent | Large | 15.2 | 12.5 | Valley | Yes | Yes |
| Cave openings not detected by lidar | ||||||||
| NA | H09_T02 | Sink | Small | 1 | 6 | Valley | Yes | No |
| NA | D09_T09.1 | Sink | Small | 2.1 | 3.3 | Valley | Yes | Yes |
| NA | D09_T08 | Sink | Small | 2.7 | 0.9 | Valley | Yes | No |
| NA | D09_T10 | Sink | Small | 4.4 | 0.5 | Valley | Yes | No |
| NA | D09_T09.2 | Sink | Medium | 5 | 2 | Valley | Yes | No |
| Actun Chichan | C09_T06 | Horizontal Ent | Blocked Ent | Side Slope | Yes | Yes | ||
| Known caves prior to survey | ||||||||
| Las Cuevas | NA | Sink-Hor Ent | Large | 85 | 14 | Valley | Known | Yes |
| Bird Tower | NA | Horizontal Ent | Large | 14.8 | 7.3 | Side Slope | Known | Yes |
| K’in K’aba Ent 1 | NA | Horizontal Ent | Large | 17.3 | 4.5 | Slope Base | Known | Yes |
| K’in K’aba Ent 2 | NA | Horizontal Ent | Medium | 5.1 | 3.5 | Side Slope | Known | Yes |
| Z’uhuy Ch’en | NA | Horizontal Ent | Fissure | 0.6 | 0.7 | Slope Base | Known | Yes |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moyes, H.; Montgomery, S. Locating Cave Entrances Using Lidar-Derived Local Relief Modeling. Geosciences 2019, 9, 98. https://doi.org/10.3390/geosciences9020098
Moyes H, Montgomery S. Locating Cave Entrances Using Lidar-Derived Local Relief Modeling. Geosciences. 2019; 9(2):98. https://doi.org/10.3390/geosciences9020098
Chicago/Turabian StyleMoyes, Holley, and Shane Montgomery. 2019. "Locating Cave Entrances Using Lidar-Derived Local Relief Modeling" Geosciences 9, no. 2: 98. https://doi.org/10.3390/geosciences9020098
APA StyleMoyes, H., & Montgomery, S. (2019). Locating Cave Entrances Using Lidar-Derived Local Relief Modeling. Geosciences, 9(2), 98. https://doi.org/10.3390/geosciences9020098