
Anomaly Detection from Hyperspectral Remote Sensing Imagery


Abstract
:1. Introduction
2. Multivariate Normal Distribution Model for Anomaly Detection
2.1. RXD
2.2. BACON
2.3. RSAD
2.4. W-RXD
2.5. PAD
3. Experiments with Hyperspectral Image Data
3.1. Hyperspectral Data Sets
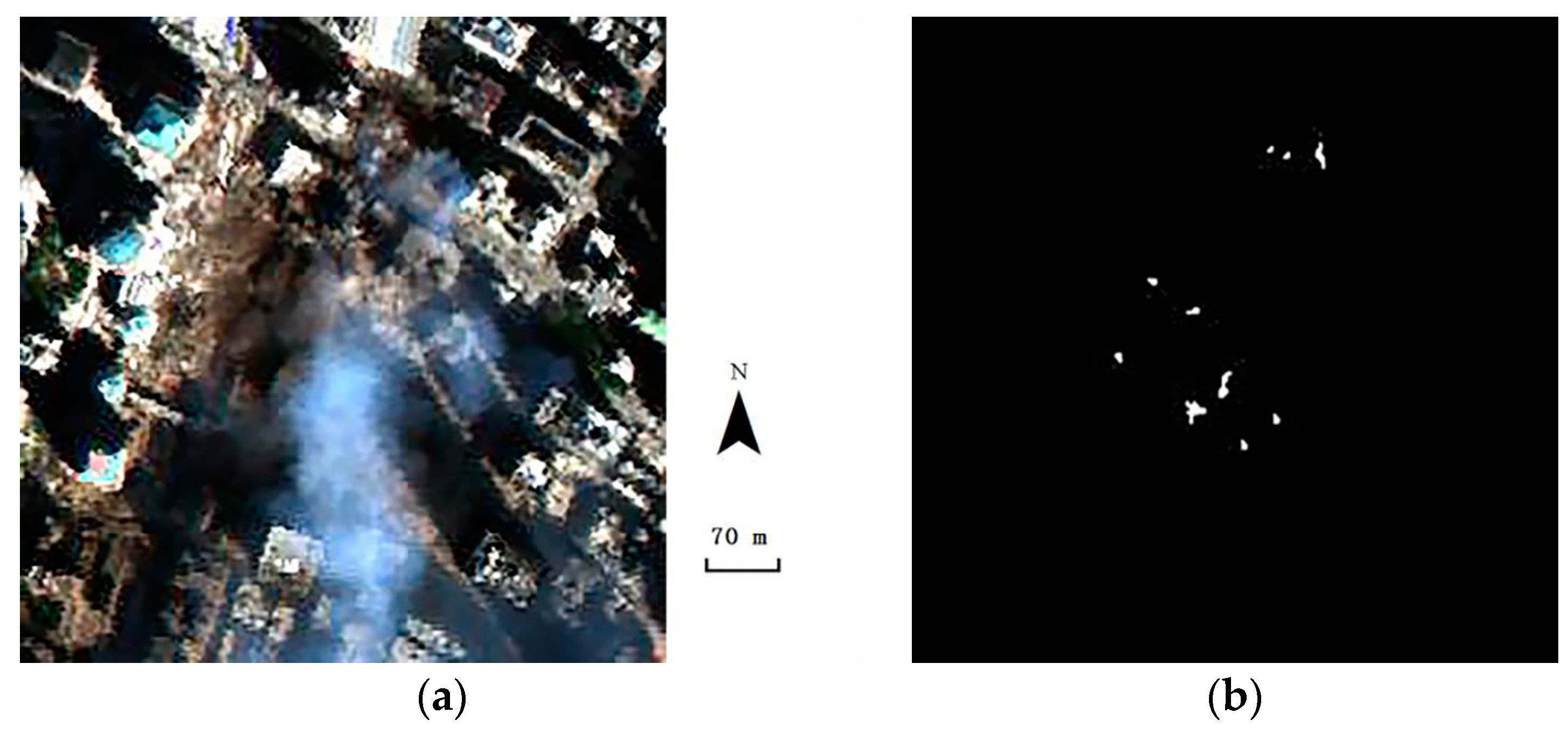
3.1.1. The World Trade Center (WTC)
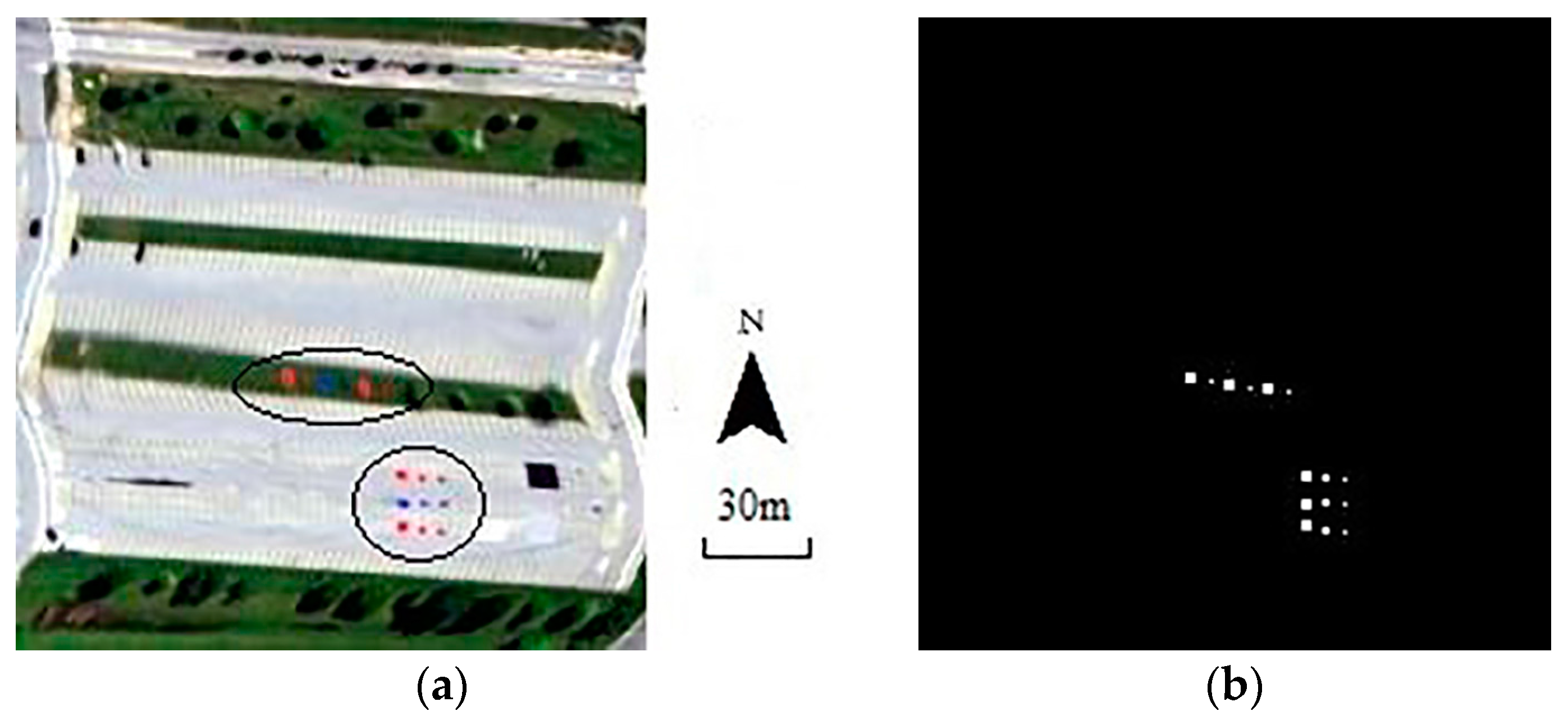
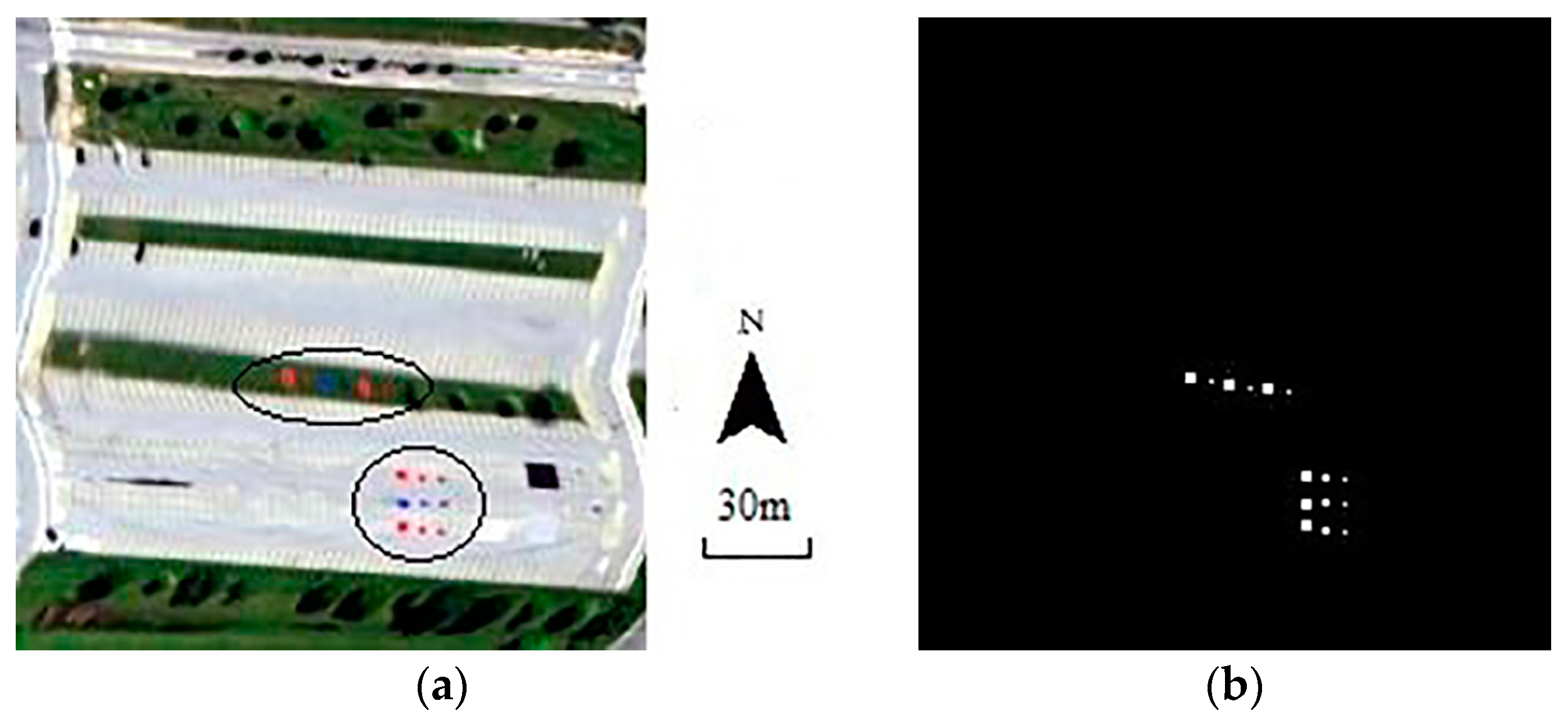
3.1.2. SpecTIR Data
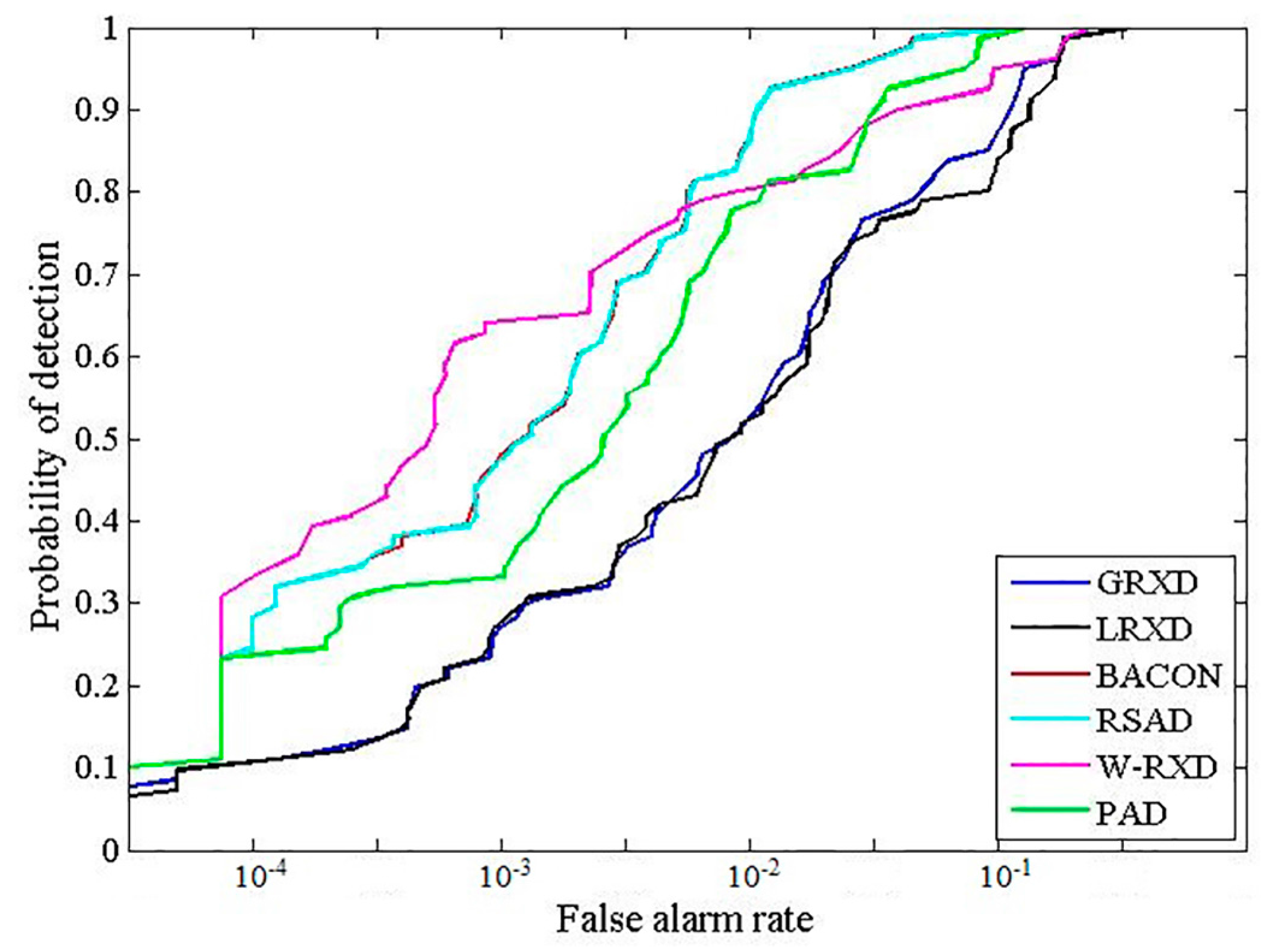
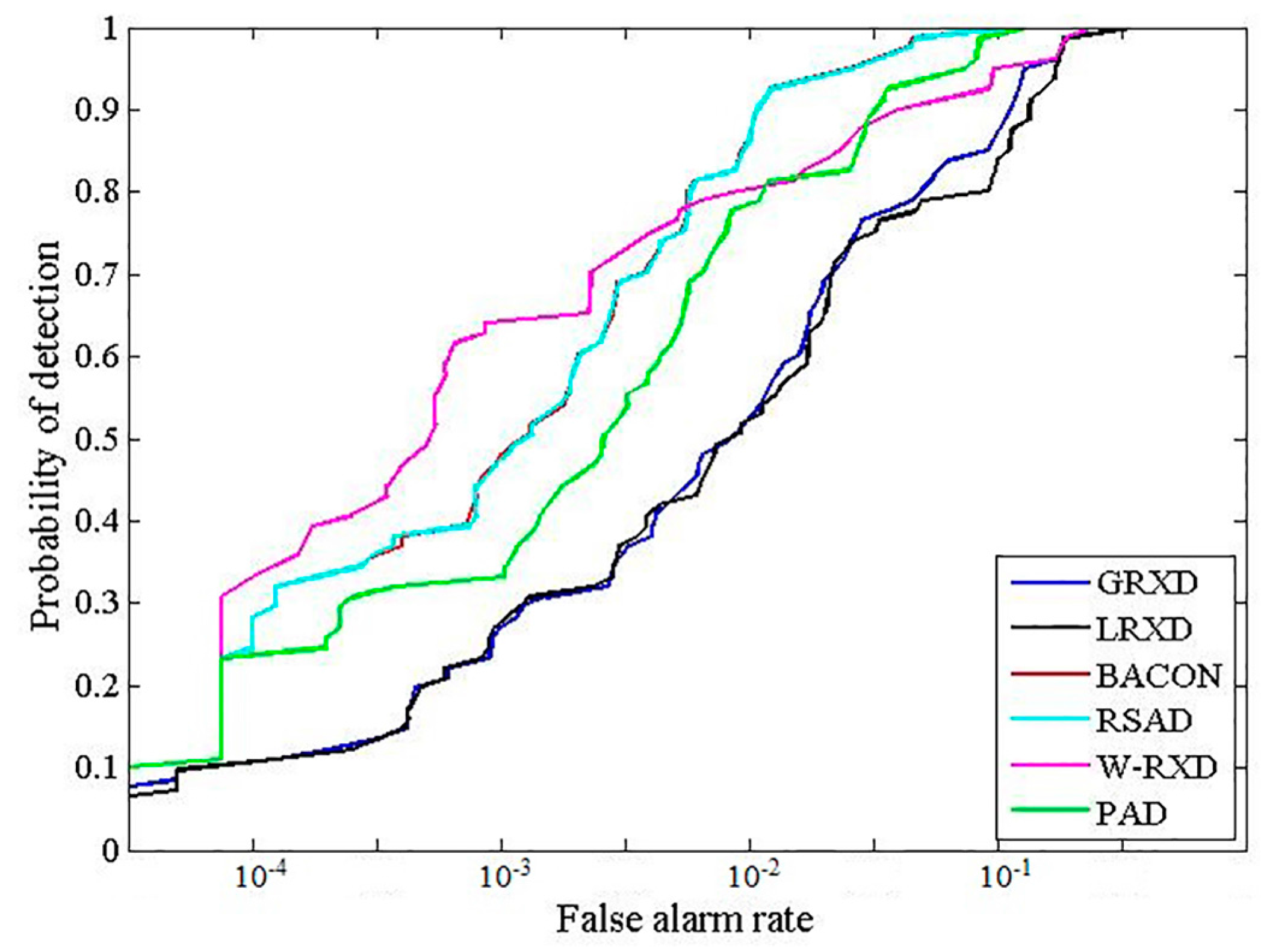
3.2. Analyses of the ROC and the AUC
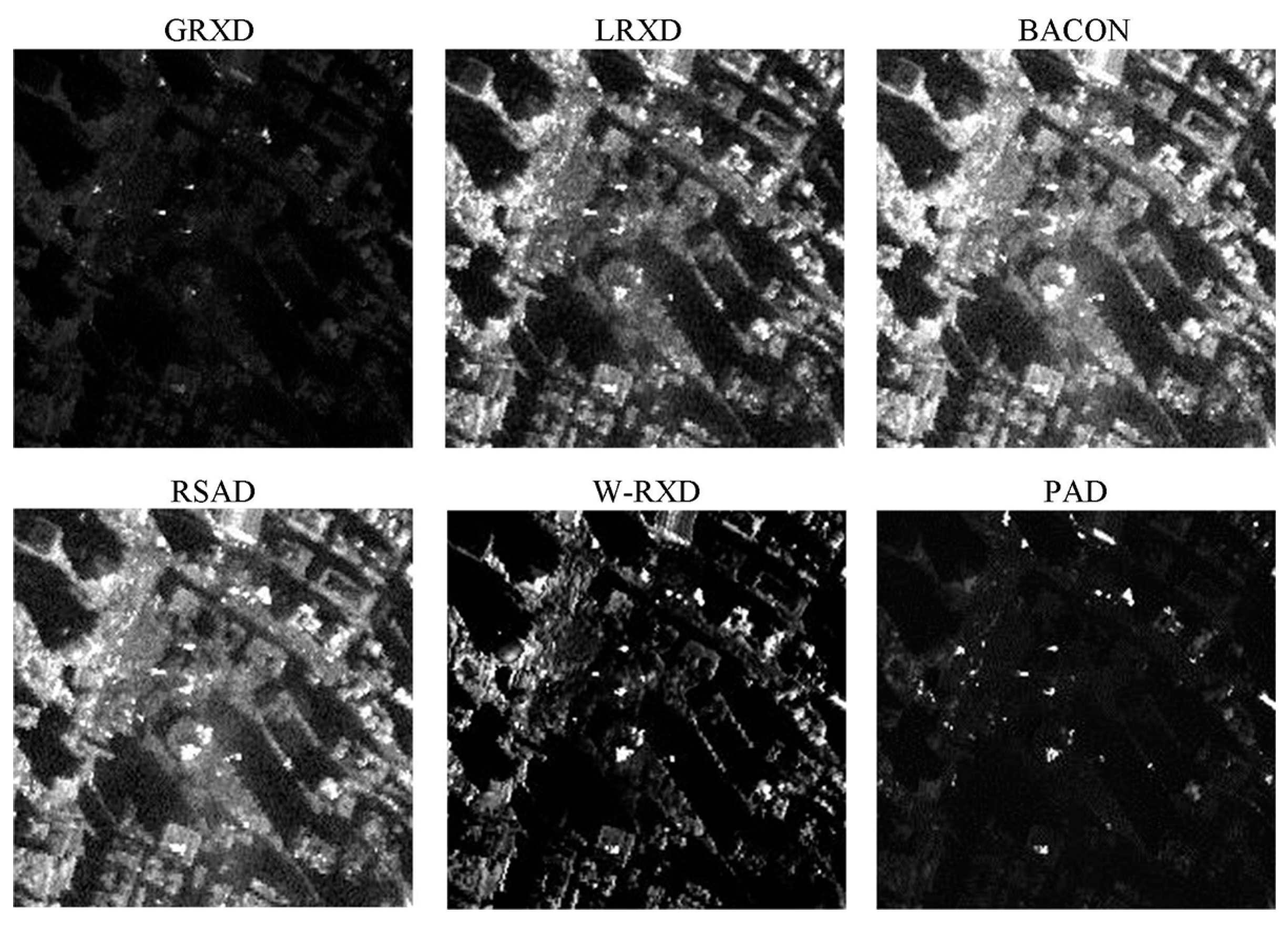
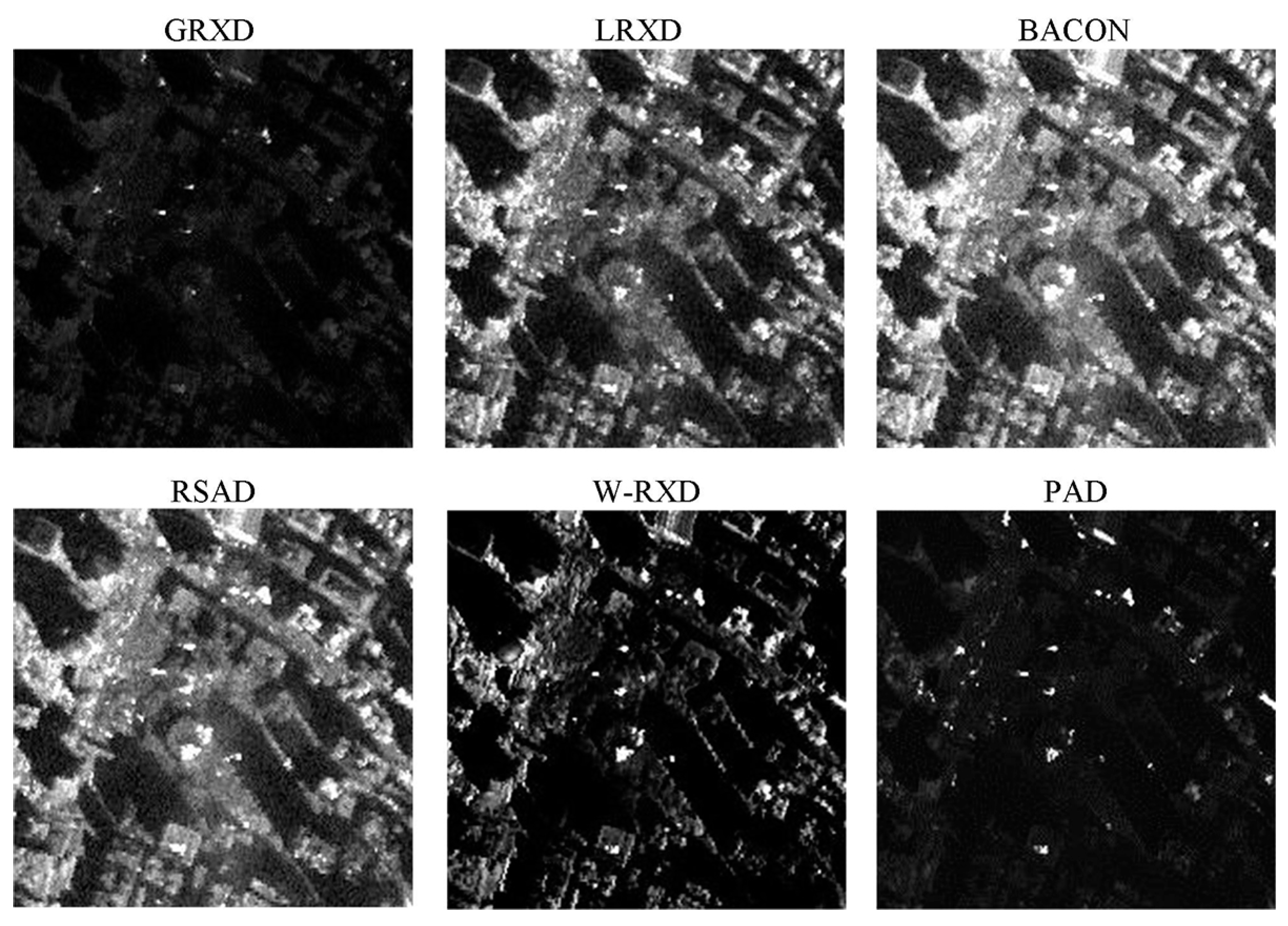
3.2.1. WTC
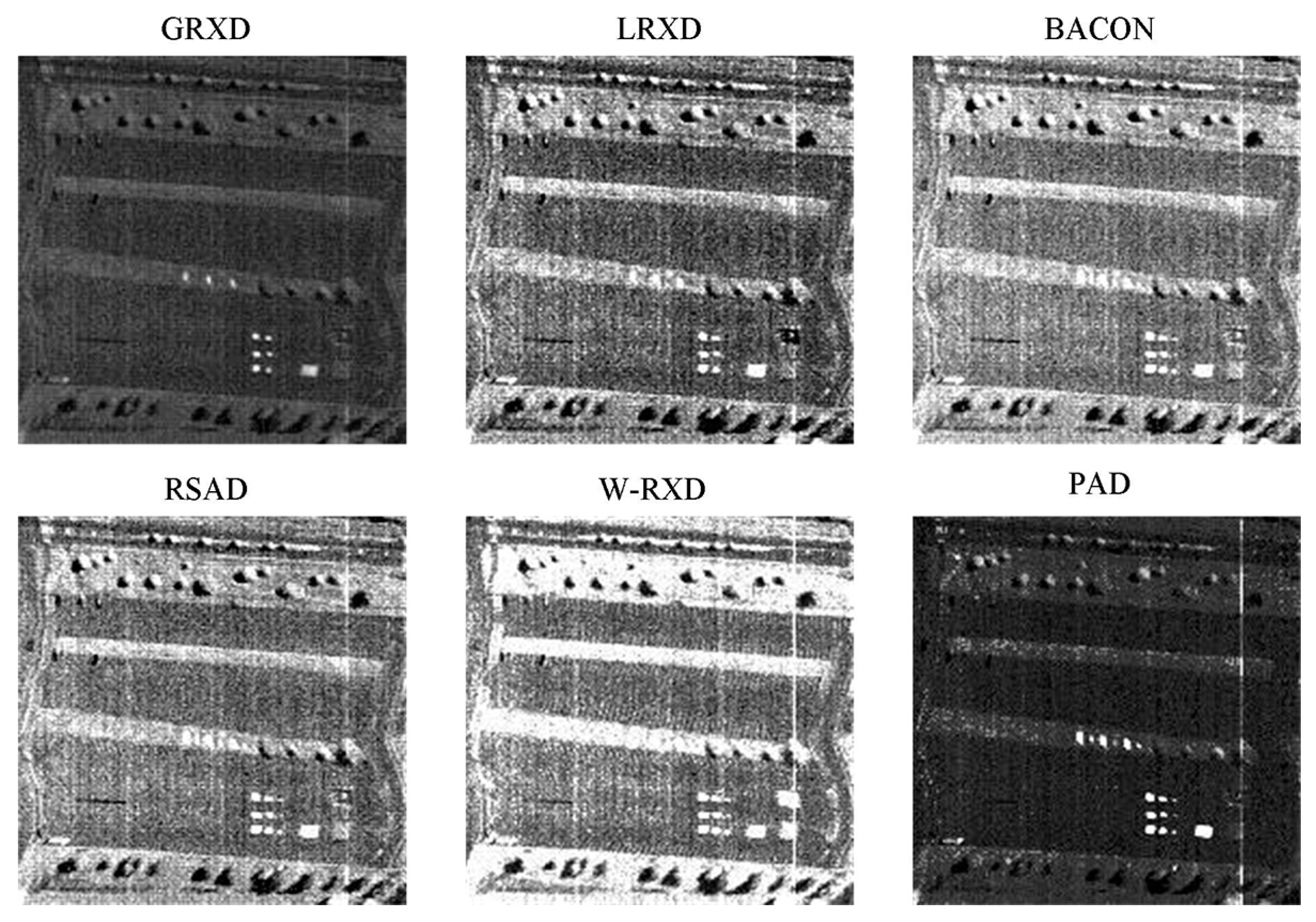
3.2.2. SpecTIR Data
4. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Stein, D.W.J.; Beaven, S.G.; Hoff, L.E.; Winter, E.M.; Schaum, A.P.; Stocker, A.D. Anomaly detection from hyperspectral imagery. IEEE Signal Process. Mag. 2002, 19, 58–69. [Google Scholar] [CrossRef]
- Banerjee, A.; Burlina, P.; Diehl, C. A support vector method for anomaly detection in hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2282–2291. [Google Scholar] [CrossRef]
- Kwon, H.; Nasrabadi, N.M. Kernel RX-algorithm: A nonlinear anomaly detector for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 388–397. [Google Scholar] [CrossRef]
- Reed, I.S.; Yu, X. Adaptive multiple-band CFAR detection of an optical pattern with unknown spectral distribution. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Huck, A.; Guillaume, M. Asymptotically CFAR-unsupervised target detection and discrimination in hyperspectral images with anomalous-component pursuit. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3980–3991. [Google Scholar] [CrossRef]
- Billor, N.; Hadi, A.S.; Velleman, P.F. BACON: Blocked adaptive computationally efficient outlier nominators. Comput. Stat. Data Anal. 2000, 34, 279–298. [Google Scholar] [CrossRef]
- Du, B.; Zhang, L. Random-selection-based anomaly detector for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1578–1589. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, B.; Ran, Q.; Gao, L.; Li, J.; Plaza, A. Weighted-RXD and Linear Filter-Based RXD: Improving Background Statistics Estimation for Anomaly Detection in Hyperspectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2004, 7, 2351–2366. [Google Scholar] [CrossRef]
- Gao, L.; Guo, Q.; Plaza, A.; Li, J.; Zhang, B. Probabilistic anomaly detector for remotely sensed hyperspectral data. J. Appl. Remote Sens. 2014, 8, 083538. [Google Scholar] [CrossRef]
- Gorelnik, N.; Yehudai, H.; Rotman, S.R. Anomaly detection in non-stationary backgrounds. In Proceedings of the 2010 2nd Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing, Reykjavìk, Iceland, 14–16 June 2010.
- Manolakis, D.; Lockwood, R.; Cooley, T.; Jacobson, J. Is there a best hyperspectral detection algorithm? Proc. SPIE 2009, 7334. [Google Scholar] [CrossRef]
- Molero, J.M.; Garzon, E.M.; Garcıa, I.; Plaza, A. Analysis and optimizations of global and local versions of the RX algorithm for anomaly detection in hyperspectral data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 801–814. [Google Scholar] [CrossRef]
- Herweg, J.A.; Kerekes, J.P.; Weatherbee, O.; Messinger, D.; van Aardt, J.; Ientilucci, E.; Ninkov, Z.; Faulring, J.; Raqueno, N.; Meola, J. SpecTIR hyperspectral airborne rochester experiment data collection campaign. Proc. SPIE 2012, 8390. [Google Scholar] [CrossRef]
- Kwon, H.; Der, S.Z.; Nasrabadi, N.M. Adaptive anomaly detection using subspace separation for hyperspectral imagery. Opt. Eng. 2003, 42, 3342–3351. [Google Scholar] [CrossRef]
- Molero, J.M.; Garzon, E.M.; Garcia, I.; Plaza, A. Anomaly detection based on a parallel kernel RX algorithm for multicore platforms. J. Appl. Remote Sens. 2012, 6. [Google Scholar] [CrossRef]
- Khazai, S.; Homayouni, S.; Safari, A.; Mojaradi, B. Anomaly detection in hyperspectral images based on an adaptive support vector method. IEEE Geosci. Remote Sens. Lett. 2011, 8, 646–650. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Min | Max | Mean | Stdev | Stretch From | Stretch To |
|---|---|---|---|---|---|---|
| GRXD | 69.08 | 1.27 × 104 | 224.00 | 211.44 | 69.08 | 1.27 × 104 |
| LRXD | 68.33 | 466.45 | 216.60 | 203.95 | 68.33 | 466.45 |
| BACON | 8.45 | 622.36 | 15.12 | 9.87 | 8.45 | 22.90 |
| RSAD | 8.45 | 615.55 | 15.11 | 9.79 | 8.45 | 22.74 |
| W-RXD | 0.48 | 3.56 × 109 | 2.39 × 106 | 3.36 × 107 | 0.49 | 1.40 × 107 |
| PAD | −258.32 | 2.39 × 105 | 136.17 | 2337.61 | −258.32 | 3497.13 |
| Algorithms | AUC | Time (s) | Algorithms | AUC | Time (s) |
|---|---|---|---|---|---|
| GRXD | 0.9689 | 9.11 | LRXD | 0.9642 | 36.10 |
| BACON | 0.9947 | 97.03 | RSAD | 0.9946 | 49.55 |
| W-RXD | 0.9837 | 14.10 | PAD | 0.9886 | 20.91 |
| Algorithms | Min | Max | Mean | Stdev | Stretch From | Stretch To |
|---|---|---|---|---|---|---|
| GRXD | 125.37 | 3.30 × 103 | 360.92 | 117.62 | 125.38 | 3.30 × 103 |
| LRXD | 114.36 | 3.23 × 103 | 353.44 | 112.89 | 187.61 | 566.06 |
| BACON | 11.11 | 213.55 | 19.05 | 4.95 | 12.69 | 23.81 |
| RSAD | 11.11 | 194.33 | 19.03 | 4.62 | 13.26 | 24.04 |
| W-RXD | 13.85 | 1.19 × 106 | 3.89 × 103 | 1.75 × 104 | 13.85 | 4.67 × 103 |
| PAD | −1.08×103 | 4.30 × 104 | −3.04 | 618.28 | −219.57 | 818.33 |
| Algorithms | AUC | Time (s) | Algorithms | AUC | Time (s) |
|---|---|---|---|---|---|
| GRXD | 0.9683 | 12.28 | LRXD | 0.9651 | 67.80 |
| BACON | 0.9988 | 77.98 | RSAD | 0.9987 | 54.58 |
| W-RXD | 0.9986 | 30.28 | PAD | 0.9993 | 31.51 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Q.; Pu, R.; Cheng, J. Anomaly Detection from Hyperspectral Remote Sensing Imagery. Geosciences 2016, 6, 56. https://doi.org/10.3390/geosciences6040056
Guo Q, Pu R, Cheng J. Anomaly Detection from Hyperspectral Remote Sensing Imagery. Geosciences. 2016; 6(4):56. https://doi.org/10.3390/geosciences6040056
Chicago/Turabian StyleGuo, Qiandong, Ruiliang Pu, and Jun Cheng. 2016. "Anomaly Detection from Hyperspectral Remote Sensing Imagery" Geosciences 6, no. 4: 56. https://doi.org/10.3390/geosciences6040056
APA StyleGuo, Q., Pu, R., & Cheng, J. (2016). Anomaly Detection from Hyperspectral Remote Sensing Imagery. Geosciences, 6(4), 56. https://doi.org/10.3390/geosciences6040056