1. Introduction
Although dust storm is probably the most famous meteorological phenomenon for the Martian atmosphere, clouds are also widespread and are highly important [
1]. Clouds play a pivotal role in the Martian water cycle, interact with the Martian dust cycle through microphysical processes, and are very sensitive to atmospheric temperature and transport. In addition, clouds provide a strong feedback mechanism for atmospheric circulation through radiative forcing and can significantly influence the strength of the zonal mean circulation, thermal tides and various eddies, e.g., [
2,
3,
4,
5,
6,
7,
8]. Understanding the distribution and effect of clouds is therefore essential and requires extensive datasets to reveal the pattern and variability on various spatial and temporal scales and to guide and constrain model simulations.
Martian clouds have been observed in the UV, visible, and infrared spectral range [
9]. Spacecraft observations since the 1970s have led to a few datasets for cloud optical depths or their proxies, e.g., [
10,
11,
12,
13,
14,
15,
16], greatly improving the knowledge of Martian cloud distribution. Among those, image observations contributed to the understanding of large-scale cloud features (tropical cloud belt and polar hoods), synoptic scale cloud systems (frontal clouds, annular clouds) and meso scale cloud structures (lee waves, cloud streets, cirrus, aster clouds over volcanoes, cloud trails), e.g., [
17,
18,
19,
20,
21,
22,
23].
Cloud optical depths have been derived from the UV images taken by the Mars Color Imager (MARCI) instrument on board the Mars Reconnaissance Orbiter (MRO) spacecraft using a radiative transfer retrieval method [
14], providing an extensive cloud dataset. MARCI visible images can also be used to retrieve optical depths, but it requires accurate knowledge of the surface bi-directional reflectance, aerosol optical properties and vertical distributions in radiative transfer modeling [
24]. Such an extensive study is beyond the scope of this paper. Instead, this paper derives cloud masks from the higher order product of the MRO MARCI Mars Daily Global Maps (MDGMs) using an image processing method. Quantitative cloud optical depths are not provided, but cloud masks differentiate cloudy pixels from non-cloudy pixels on a regular high resolution 0.1° latitude × 0.1° longitude grid for each day. As MDGMs are not limited to viewing zenith angle < 70° as MARCI UV cloud retrievals are [
14], the spatial coverage of the cloud mask presented here is better, especially in the low latitudes where the distance between adjacent MRO orbit tracks is the largest. A joint analysis of the optical depths and cloud masks can provide complementary information on Martian clouds. Although crude comparisons with optical depth datasets are made on several occasions, detailed analysis along this line awaits future work.
In this paper, one Mars year of cloud masks is derived from the MRO MARCI MDGMs and used to study the evolution and characteristics of the tropical cloud belt. Hubble Space Telescope images showed a zonal band of condensate clouds with UV and violet optical depth of 0.2–0.6 between 10° S and 30° N in the aphelion season of northern spring and summer [
19,
25]. This large scale feature was identified as the tropical cloud belt [
25]. Viking observations demonstrated that Martian clouds are widespread and confirmed the planetary scale of the tropical cloud belt [
10]. Mars Global Surveyor (MGS) observations systematically monitored Martian clouds and found that the tropical cloud belt attains its maximum extent near L
s = 100° and shows little interannual variability [
11,
20]. (L
s is solar longitude that measures Martian season, with 0° at northern spring equinox, 90° at northern summer solstice, and so on.) In addition to building upon cloud climatology, recent observations from MRO, Mars Odyssey, Mars Express and other spacecrafts further characterized the vertical distribution, relationship with dust activity, and pronounced diurnal cycle of Martian clouds [
15,
24,
26,
27,
28]. This paper investigates the tropical cloud belt from both customary and new points of view, with a focus on several applications that benefit from the higher resolution and systematic coverage of the product as compared to other datasets.
2. Data
This study uses the Mars Daily Global Maps (MDGMs) composed from the wide-angle image swaths taken by the MARCI camera on board the MRO spacecraft. MRO is in a 2-hourly 0300–1500 LT sun synchronous orbit and has been mapping Mars since late 2006 [
29]. On the dayside of each orbit, the 180° field-of-view push-frame MARCI camera takes two UV (short and long UV) and five visible (blue, green, orange, red, and NIR) global image swaths. The nominal resolution at nadir is about 1 km/pixel for visible and 8 km/pixel for UV, but degrades towards the limb [
30,
31]. MARCI images are organized by mission phases (named “P”, “B”, etc.) and subphases (named “P01”, “P02”, etc.) where each mission phase includes 22–23 subphases and each subphase contains a month of data (
https://pds-imaging.jpl.nasa.gov/volumes/mro.html, accessed on 29 July 2021).
To facilitate the visualization of Martian clouds and dust storms, the MARCI images were processed into MDGMs on regular (0.1° × 0.1° or 0.05° × 0.05°) longitude × latitude grids (
Figure 1). Each MDGM was composed from 13 consecutive global image swaths taken during approximately one Mars sol (about an Earth day, sol and day are used interchangeably in this paper). Overlap areas of the swaths were mapped using a weighted average where the pixels with better lighting conditions were assigned larger weight. Adjacent MDGMs overlapped by one swath. RGB color composites were made from the red (or orange when red is unavailable), green, and blue maps. The MDGMs have evolved from Version 1 [
32] to Version 2. The latter can be accessed from the NASA PDS Annex (
https://astrogeology.usgs.gov/search/map/Mars/MarsReconnaissanceOrbiter/MARCI/MARS-MRO-MARCI-Mars-Daily-Global-Maps, accessed on 29 July 2021) and the Harvard Dataverse (
https://doi.org/10.7910/DVN/U3766S, accessed on 29 July 2021). The first year of the Version 2 color MDGMs (from MY 28 L
s = 132° to MY 29 L
s = 135°, i.e., from P01 to B01) are used in this study. The Mars year numbering follows the convention that L
s = 0° of Mars year 1 corresponds to 11 April 1955 [
33].
The MDGM processing pipeline includes radiometric calibration, backplane calculation (for geolocation, illumination and viewing geometry), photometric correction (for large-scale and pixel-to-pixel brightness variation), black-and-white map generation (for each filter) and RGB color composite production. Version 2 MDGMs were used in dust storm studies before [
34,
35], but the differences between Version 1 to Version 2 MDGMs have not been described in detail. Thus, the changes are summarized below: (a) Radiometric calibration first applies the procedure described in the “marcical.txt” file that accompanies each MARCI data volume, then a normalization framelet is applied on each framelet of each image swath. The latter is to reduce any residual pixel-to-pixel brightness variation. To derive the normalization framelet for each filter, the average framelet of the subphase is calculated and each line of the average framelet is divided by its smoothed version. (b) Updated Navigation and Ancillary Information Facility (NAIF) SPICE kernels (
https://naif.jpl.nasa.gov/naif/, accessed on 29 July 2021) are used to calculate the backplanes. Previously, to improve processing speed, backplane calculation was performed every eight pixels for visible images and interpolation was used to fill in the gap. After the migration of the processing pipeline to high performance cluster in 2020, backplane calculation is performed for each pixel, which results in more accurate mapping. This applies to the subphases after J09 and the reprocessed subphases specified on the MDGM Harvard Dataverse website. (c) Each mission subphase is processed with its own photometric parameter values. These values are derived using a non-linear least-squares fit of the subphase’s average radiometrically calibrated image to the equation in reference [
32]. Although the fitted parameters are correlated and non-unique [
36], the procedure greatly reduces the large-scale brightness variations associated with the illumination and observation geometries. (d) To further reduce geometry-related brightness variations, the average of the images after photometric function correction is derived and used to normalize each image.
If all MARCI swaths within a subphase have exactly the same viewing geometry, then the average radiometrically calibrated image can be used to normalize each image without a photometric function correction. However, MRO often performs maneuvers along different parts of different orbits, resulting in anomalous viewing geometries. As the associated brightness anomalies can be greatly alleviated by the photometric function, the two-step correction (i.e., photometric function followed by image normalization) generally performs better. However, image normalization has a drawback: if the normalization image contains brightness variations unrelated to the illumination and viewing geometries, such as surface albedo features, then all the images being normalized will be affected. In general, when several hundred image swaths within a mission subphase are averaged, the dark and bright surface albedos largely cancel out and the result is mostly due to photometric angles. However, the polar cap has exceptionally high albedo contrast with the surroundings, which leads to bright area at the top and/or bottom of the averaged image. Consequently, the corresponding area in the normalized image will appear much darker. To mitigate this problem, the polar cap affected area in the averaged image was often replaced with the values extrapolated from the lower latitudes. Different (linear, bilinear, quadratic) extrapolation methods were experimented on and applied to some of the subphases used in this study when those MDGMs were made. No particular method was found to consistently outperform others. To simplify, the current practice is to replace the relevant area with the smoothed version of a close-by image line that is empirically chosen for each subphase. With the exception of the reprocessed subphases (P02, P06, P07, P08, P09, P13), the MDGMs used in this study were not reprocessed using this method.
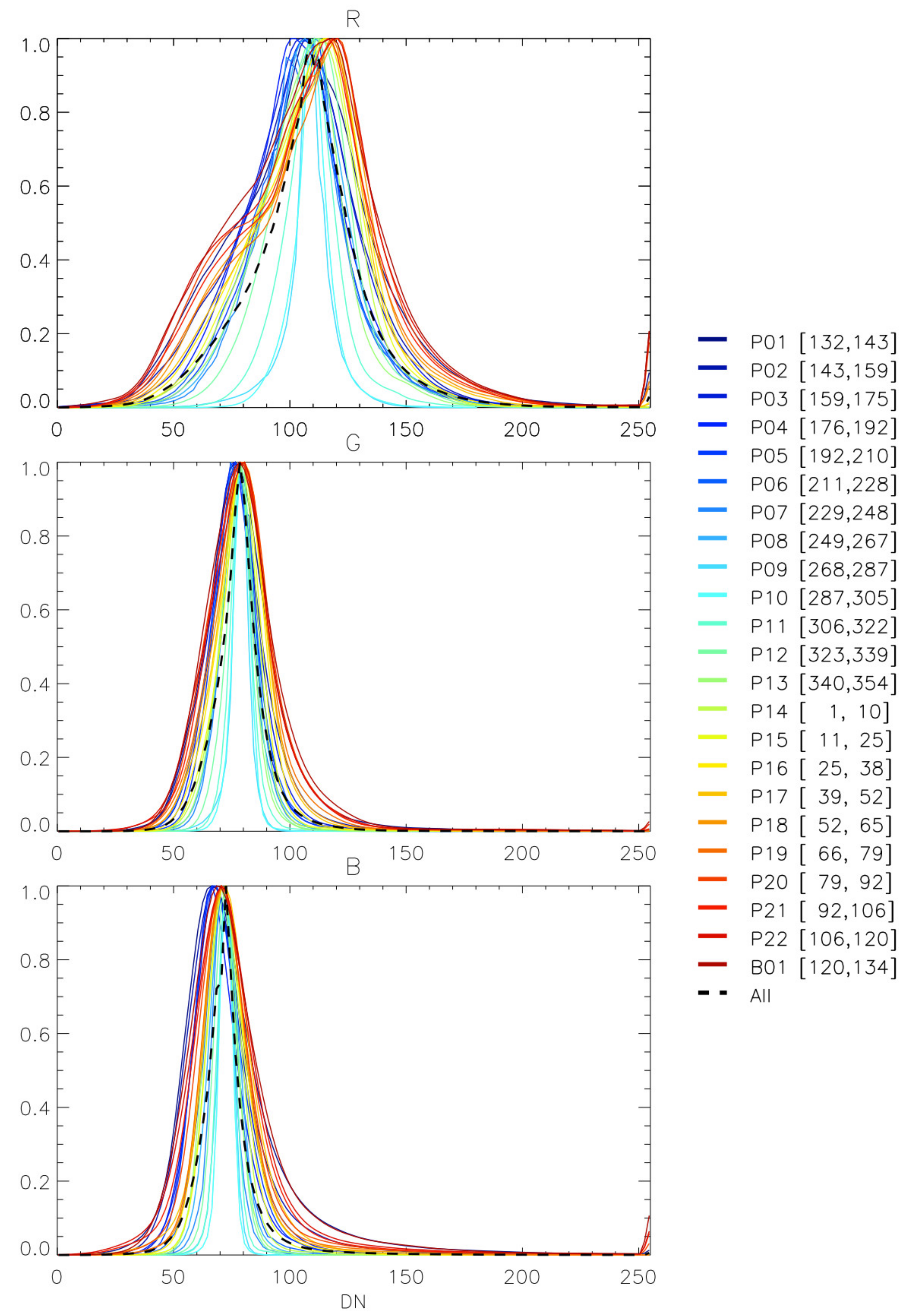
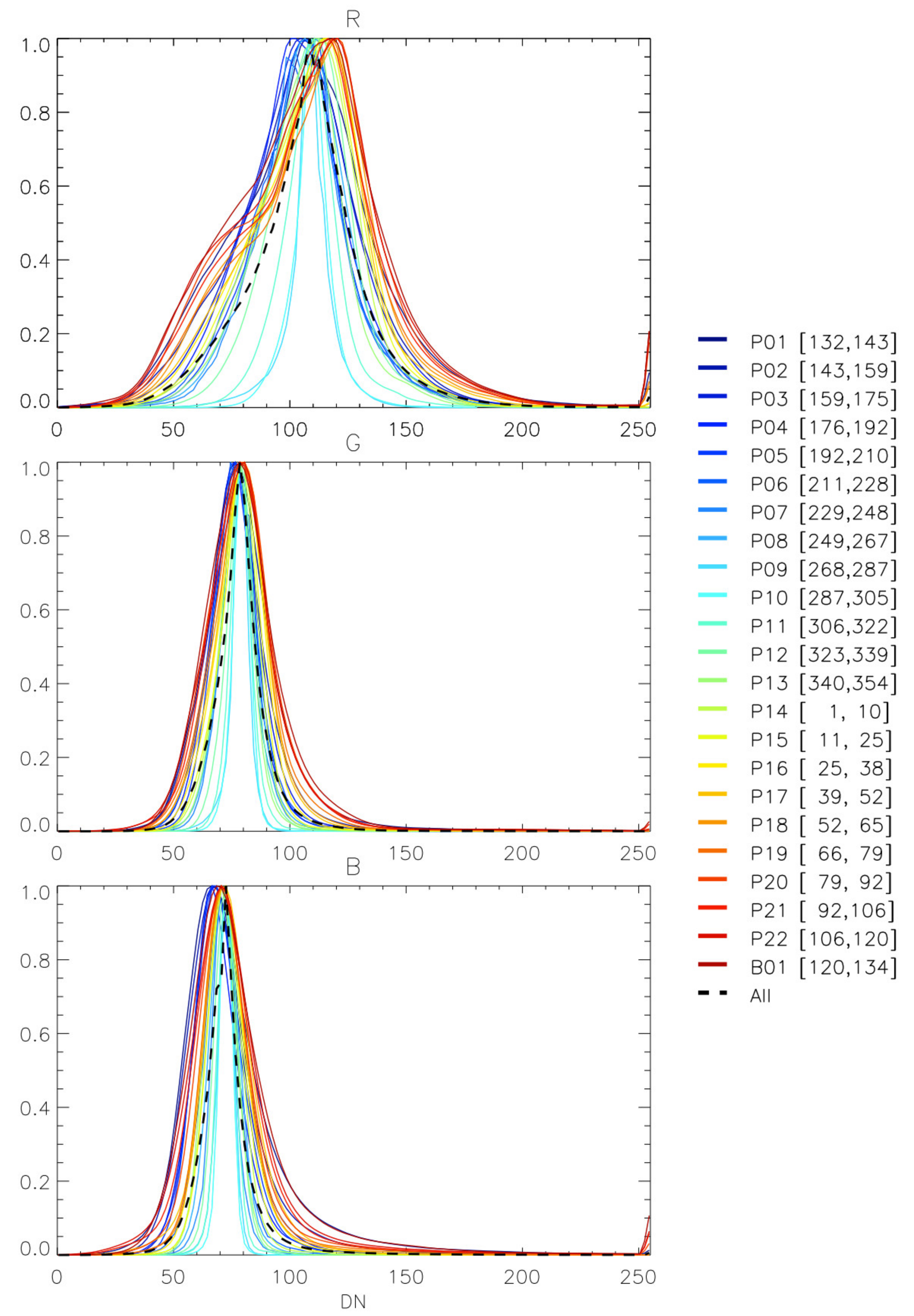
Despite the differences in photometric processing of different mission subphases, the RGB color composites have overall similar colors across the MRO mission. This is because a consistent color scheme is applied. For each channel, the median of each map is scaled to a fixed value and the resulting map is stretched so that a predefined range is linearly mapped to the Data Number (DN) range from 0 to 255.
Figure 2 shows the resulting normalized DN distributions of the R, G and B channels for the area between 40° S and 40° N. For each channel, different subphases cluster around the overall distribution with only small shifts in the positions of the distribution modes. The G, B and most R curves have approximate Gaussian shape. Two-mode distribution is discernable in the R channel for the subphases in northern spring and summer (e.g., P18-B01), which reflects the higher surface albedo contrast in the longer wavelength for the less dusty period of the year. All three channels show the same tendency of narrower distributions for L
s = 249°–322° (P08–P11). This essentially reflects the reduced visible contrast due to the Mars year (MY) 28 global dust storm [
32,
35,
37].
3. Method
This paper uses an image processing technique to distinguish clouds that are identifiable by eye in MDGMs. By definition, subvisible clouds are not included. The blue (B) and red (R) channels of the RGB color maps are used to derive daily cloud masks at the native standard MDGM resolution (0.1° × 0.1°). As will be explained in
Section 3.1 and
Section 3.2, the method follows three steps: (1) Select cloud candidates using the B channel; (2) filter out false positives by exploiting the B channel to R channel ratio; and (3) conduct quality control on the resulting cloud mask. The method is only semi-automatic as human decisions are involved at various stages to maintain the quality of computer-generated products. However, it is much more efficient than manually picking pixels of interest directly from each color MDGM. Before the details of the method are described in
Section 3.1 and
Section 3.2, the next few paragraphs define the cloud masks, justify the reasons for using the B and R channels, and provide some caveats.
In the cloud masks, non-cloudy pixels are set to zero, cloudy pixels are set to their adjusted DNs of the B channel MDGMs (
Section 4.3), missing and excluded pixels are set to −999 to indicate invalid data.
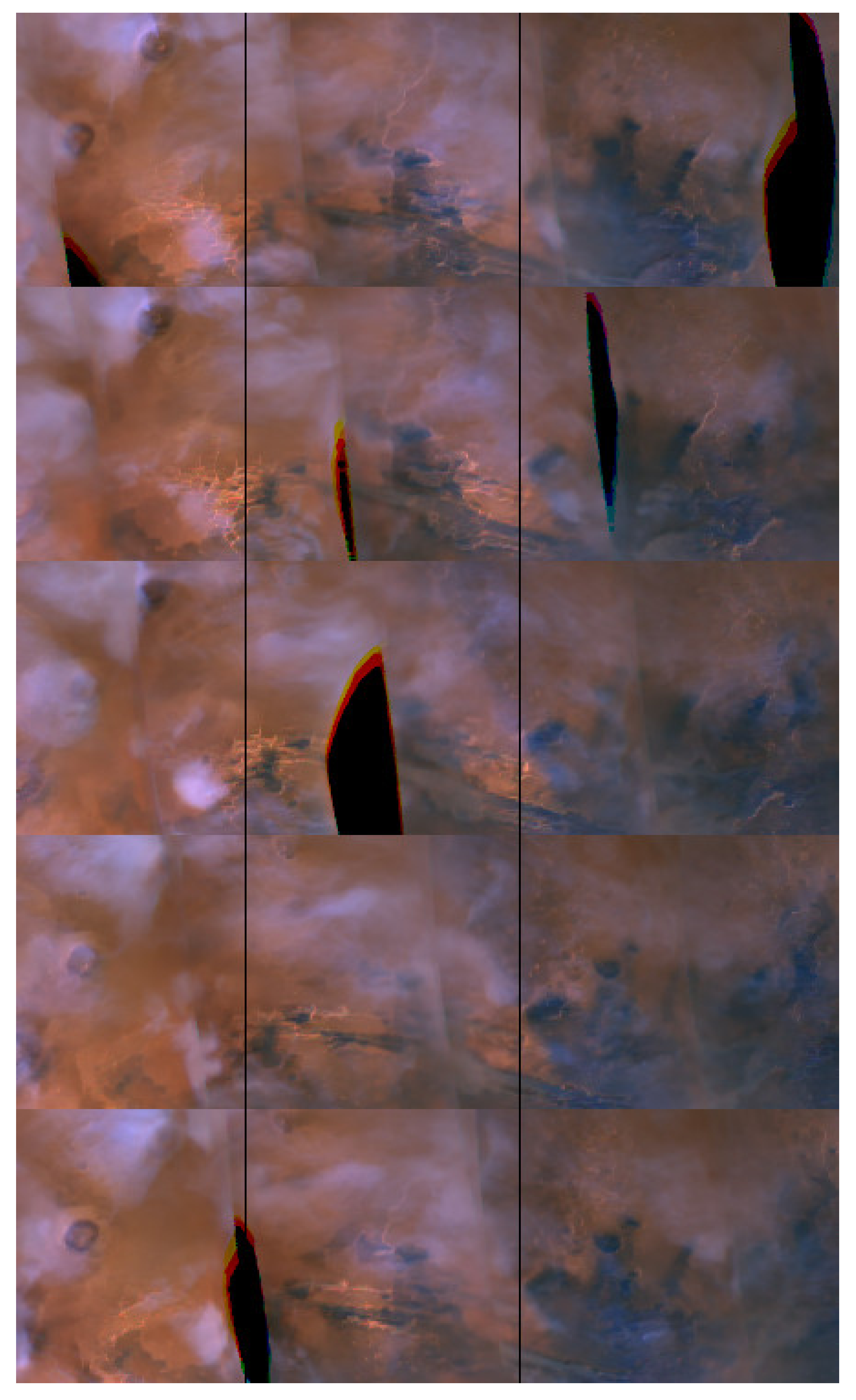
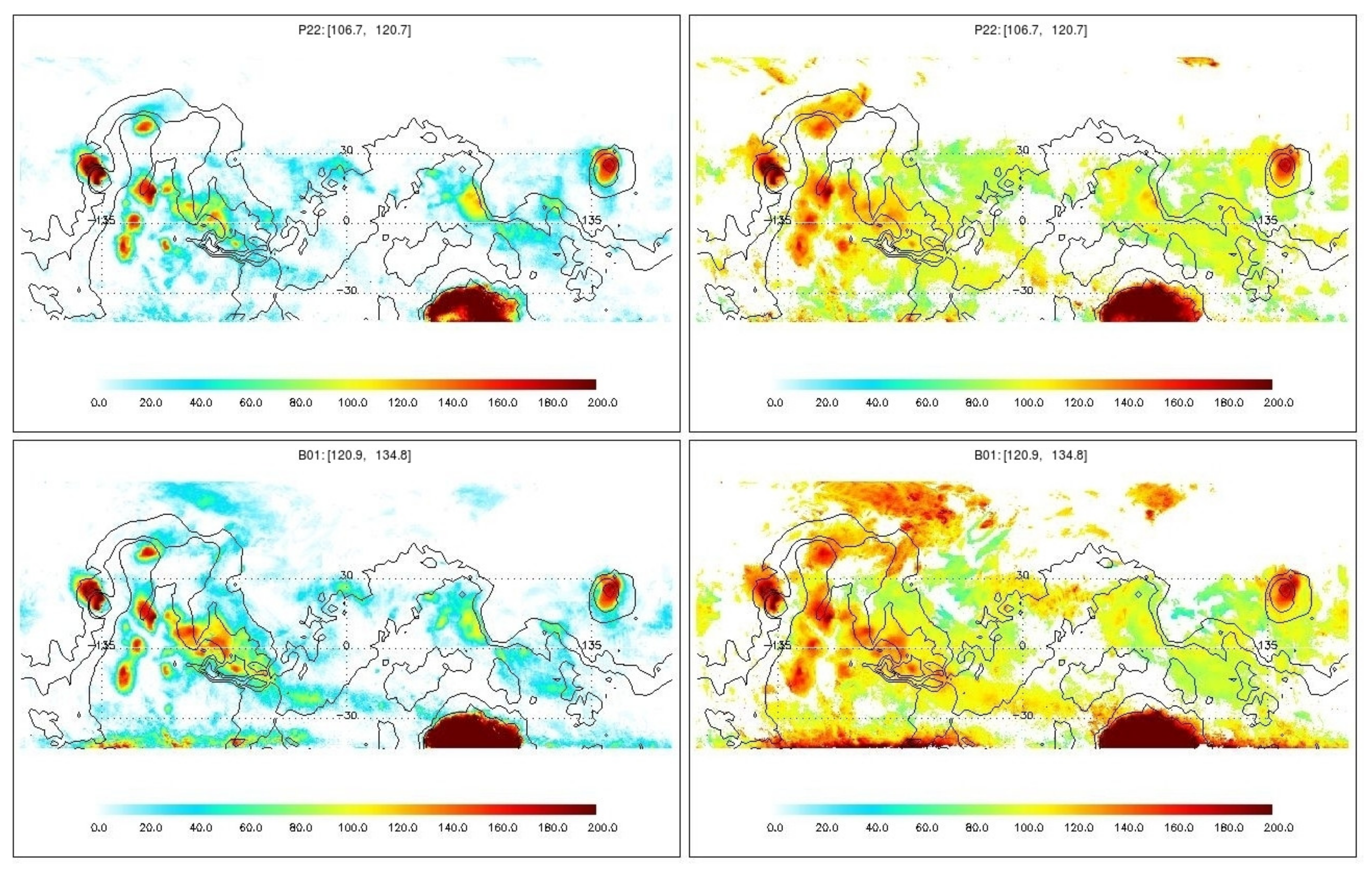
Among the R, G, and B channels of the color MDGMs, surface albedo features have the most contrast in the R channel and the least contrast in the B channel, clouds are the most apparent in the B channel and dust storms are the most apparent in the R channel (
Figure 1). Thus, the B channel is most suitable for selecting candidate cloudy pixels. However, thick dust storms also appear quite bright in the B channel, though more so in the R channel (
Figure 1 arrows). In other words, dust storms have smaller blue-to-red ratio than clouds, which is why clouds appear blueish and dust storms appear reddish in color MDGMs. The well-known color difference between Martian dust storms and condensate clouds was used to design the MARCI and other camera’s filters for the purpose of their distinction
9, 31. Interested readers can use the on-line interface of the Planetary Spectrum Generator (PSG) [
38] (
psg.gsfc.nasa.gov, accessed on 29 July 2021) to verify the effect of dust and clouds on the spectrum. In this paper, the ratios of the B to R channels are exploited to filter out the pixels affected by thick dust storms or surface features.
Although clouds may coexist with dust storms within a single pixel, the situation is not differentiable using MDGMs alone. Thus, the identified clouds should be considered as those that are not affected by apparent dust storms. As both surface ice deposits and atmospheric condensate clouds are bright in MDGMs, they cannot be differentiated based on pixel brightness alone. Although surface ice deposits can be filtered out based on their geographical locations and seasonal variations, further work is required to precisely determine where those pixels are in each MDGM. For simplicity, the pixels affected by polar caps are empirically excluded for each subphase in this study. For Hellas basin, it is sometimes possible to deduce that clouds exist above the seasonal ice deposit based on the morphology of the clouds in the vicinity of the region. Those pixels are preserved in the cloud mask. However, the corresponding DN values are contaminated by the high surface ice albedo, thus, they should not be used to compare with the cloud brightness in other areas.
3.1. Cloud Candidate Selection
To avoid subsequent complication in cloud detection, each color MDGM from P01 to B01 is visually inspected and the areas with apparent image processing defects are manually cropped out (e.g.,
Figure 1). After this preparation step, subsequent steps were performed one mission subphase at a time. This is one of the ways of handling possible complications associated with the image processing differences in MDGM construction (
Section 2).
The cloud detection algorithm exploits the high brightness contrast between clouds and non-ice surface in blue images. Specifically, potential cloudy pixels in each MDGM are selected based on their DN deviations from a reference blue base map. The pixels with large positive deviations are deemed potentially cloudy and are assigned their original B channel DNs at this step (but will be adjusted in the final product—see
Section 4.3), the pixels with negative or small positive deviations are deemed non-cloudy and are masked out with zero, the missing and excluded pixels are marked with −999. The workflow and details are described below.
(A) For each mission subphase, a blue base map composed of Data Numbers (DNs) without cloud influence is derived using the following procedure. (1) All the B channel maps within the subphase are stacked into a 3D array. At each horizontal pixel position, the smallest two DNs in the third dimension are discarded and the next smallest DN is chosen. The procedure is designed to minimize the influence of both clouds and potential low DN outliers in MDGMs. The resulting map is called “map0”. (2) Visual inspection is conducted on map0. If it is determined that some pixels are influenced by clouds, then those pixels are replaced with the non-cloudy DNs scaled from other subphases so that the mean DN in the neighborhood matches. The pixels to be replaced are chosen to be those above an empirical DN threshold through trials. A larger threshold leads to less pixels chosen, and vice versa. As an intermediate aid, map0 only needs to be reasonable and does not need to be accurate. It is intended to be used in combination with the detection criterion in step (B) to discriminate between large and small DN deviations. As the final cloud mask is required to pass a quality control step that manually corrects errors, a better combination of map0 and detection criterion will reduce the amount of manual work later on, therefore, it is desirable. When necessary, map0 is manually adjusted further in certain regions so that it works better with the selection criterion in (B). (3) The latitudes affected by polar caps are subjectively determined and excluded from map0. The result is the blue base map.
(B) The deviations of each B channel MDGM and the blue base map are calculated. A threshold for the deviations (called a “deviation threshold”) is chosen empirically for each subphase. This is carried out by iteratively examining the selected cloud candidates and adjusting the map0 versus deviation threshold pair. The pair is tuned until the visually obvious clouds in the batch of MDGMs are satisfactorily included and the inter-subphase consistency is maintained. The final choices for the deviation thresholds vary between 32 and 38 among the subphases and are specific to each subphase’s base map and MDGMs. The map0 and deviation threshold pair used in this paper is only one of the possible combinations that can serve the purpose of selecting cloud candidates.
3.2. False Positive Filtering and Quality Control
Thick dust storms may be mistaken for clouds in blue MDGMs (
Figure 1) and need to be filtered out. In contrast to the B channel, the R channel shows large variations in surface albedo. Consequently, the B to R ratios vary strongly with geographical locations and are roughly anti-correlated with the albedos of the R channel. This makes it unsuitable to use a single B to R ratio threshold across the planet for filtering. Thus, a ratio’s ratio method is used instead. Specifically, the B to R ratio map for each day is divided by a reference B to R ratio map and the resulting map is evaluated against a specified ratio’s ratio threshold. As dust tends to make the B to R ratio smaller, the pixels with the ratio’s ratios below the threshold are probably affected by dust and are discarded. In theory, the ratio’s ratio threshold is 1.0; in practice, the ratio’s ratio threshold is set to 1.05. This is to account for the errors in image processing during the production of MDGMs and the errors associated with the construction of the reference B to R ratio map, as well as to avoid over-filtering cloudy pixels.
The reference B to R ratio map mentioned above is derived using the following procedure for each subphase. First, the median blue and the median red map for the subphase are derived, where each pixel in the median map adopts the median DN of all the days at that position. The ratio map of the median blue to the median red map is calculated. Clouds are searched in the median blue map using the procedure described in
Section 3.1, and if found, the corresponding pixels in the ratio map are set to a missing value. The resulting ratio map is called “br2map0”. Next, the MDGM grid cells are classified into surface albedo bins with a bin size of 0.01 using a red Mars surface albedo map [
39]. It is assumed that pixels with similar red surface albedos have similar B to R ratios, as the albedo is more uniform at shorter wavelengths. The median B to R ratio for each red surface albedo bin is calculated using the non-missing values in b2rmap0. Finally, each pixel of the reference B to R ratio map is assigned the value calculated for the corresponding red surface albedo bin.
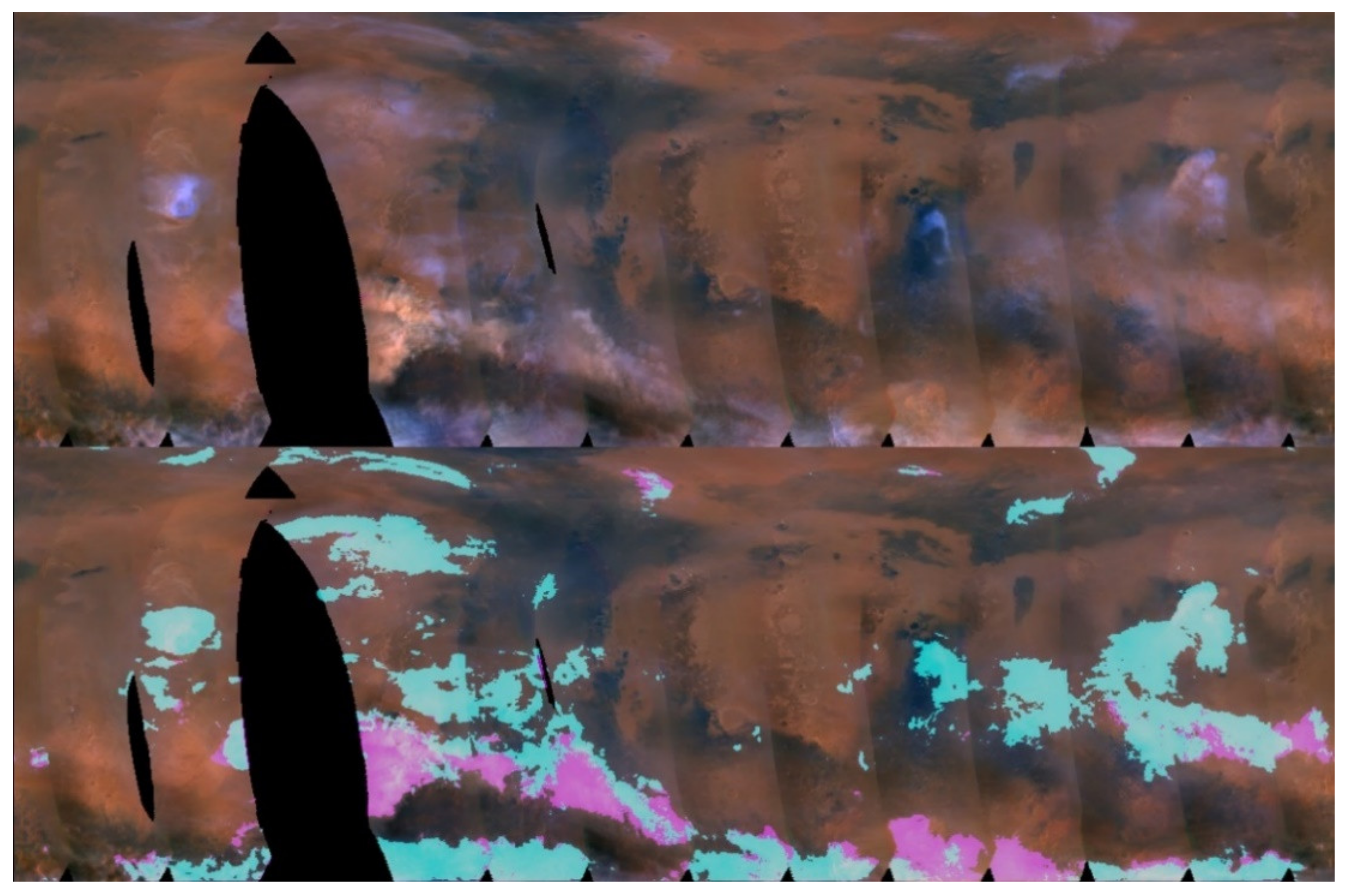
As an example, the bottom panel of
Figure 3 shows the clouds identified before quality control for MY 28 L
s = 147°. The cloud candidates derived from the B channel (
Section 3.1) are highlighted in two colors where the detected cloudy pixels (teal, to be retained) are separated from the others (pink, to be excluded) that are identified using the B to R ratio’s ratio method (
Section 3.2). The technique generally works well for identifying obvious clouds and for filtering out false positives associated with surface albedo features or thick dust storms.
Quality control is conducted as the final step, where each cloud mask is visually inspected. Any residual false positives are deleted, and rare cases of false negatives are added manually. The quality control was conducted on a laptop computer with a screen size of 1536 × 864 pixels. Each cloud mask along with its corresponding MDGM (3600 × 1801 pixels) were downsized to fit on the screen for simultaneous visual inspection. Thus, not all errors can be eliminated due to this limitation, especially for those that are randomly scattered; in addition, human errors may exist but are difficult to quantify. Thus, extra care is needed for studies of local phenomena. In this paper, we use the cloud masks for large-scale studies where the fine details of the cloud masks are not essential for the conclusions. The overall DN histograms of the final cloudy and non-cloudy pixels classified in this paper can be found in
Figure S1.
5. Summary and Discussion
Cloud masks have been derived from the Version 2 MRO MARCI Mars Daily Global Maps (MDGMs) for 1 Mars year (from MY 28 L
s = 132° to MY 29 L
s = 135°) using a semi-automatic image processing technique. Changes between the Version 1 and Version 2 MDGMs are descried. The blue channel map of each color MDGM is used to select cloud candidates, and the blue-to-red ratio’s ratio is used to filter out false positives. Manual quality control is conducted through visual inspection. The cloud masks are on MDGM’s native 0.1° longitude × 0.1° latitude grid and are available each day. In the cloud masks, non-cloudy pixels are set to zero, cloudy pixels are set to their adjusted Data Numbers of the blue channel maps (
Section 4.3), missing and excluded pixels are set to a special number (−999).
In this paper, the derived cloud masks are used to investigate the large-scale evolution and characteristics of the tropical cloud belt on Mars, with a focus on a few aspects that benefit from the high spatial and temporal resolutions. The main results are summarized below.
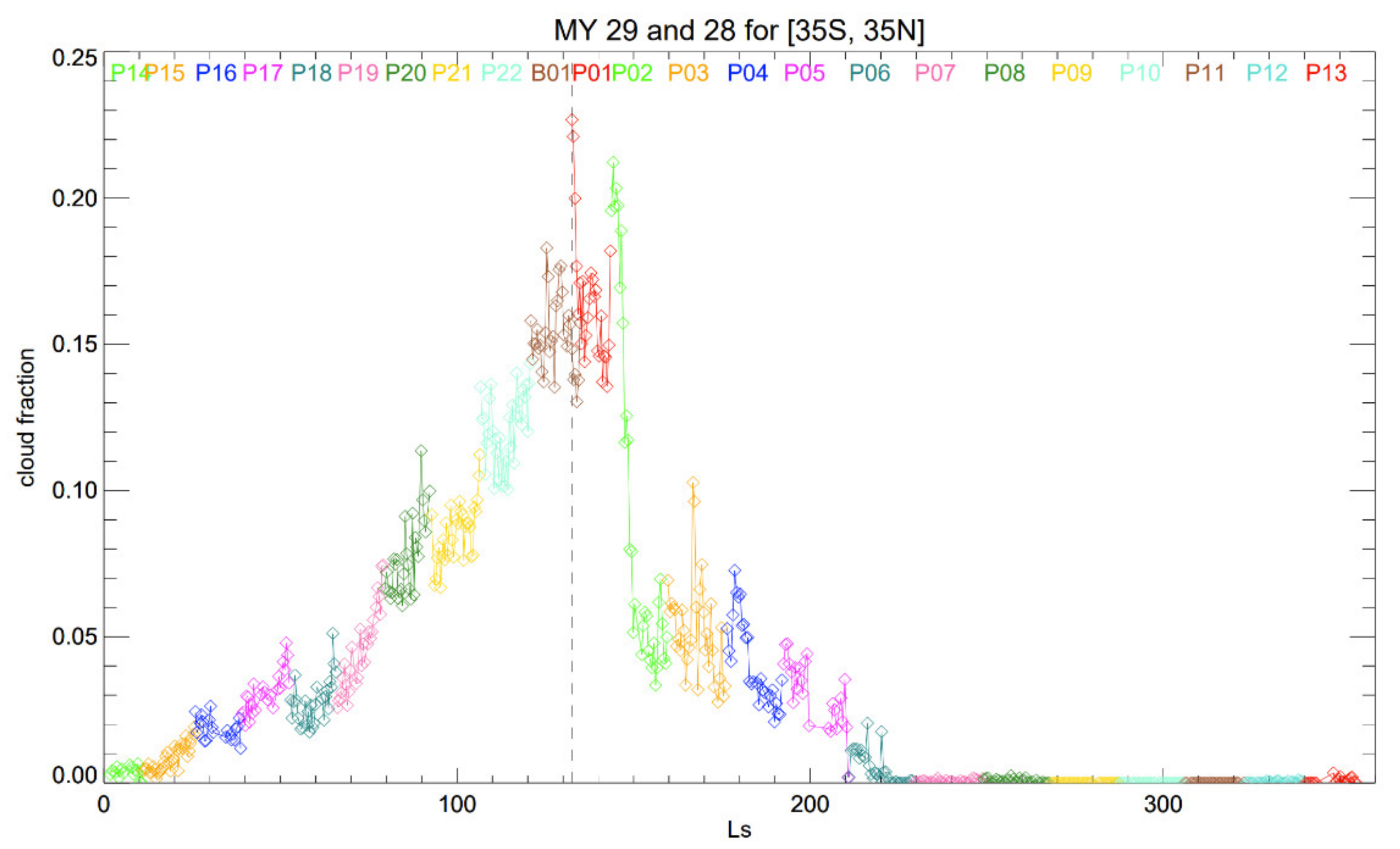
The fraction of cloudy area between 35° S and 35° N gradually increased from ~1% at L
s = 20° to ~17% near L
s = 125° in MY 29. The timing of the peak was near the early-to-mid northern summer transition, which agrees with the MARCI UV result [
14] but not with the TES IR results [
11]. In MY 28, the cloud fraction sharply dropped from ~22% to ~15% within a week of L
s = 132°, a secondary peak of 21% occurred near L
s = 144° and was associated with a large-scale zonal cloud oscillation, the cloud belt quickly collapsed afterwards, to which several dust storms may have contributed. Clouds were not identified in MDGMs during the time period affected by the MY 28 global dust storm.
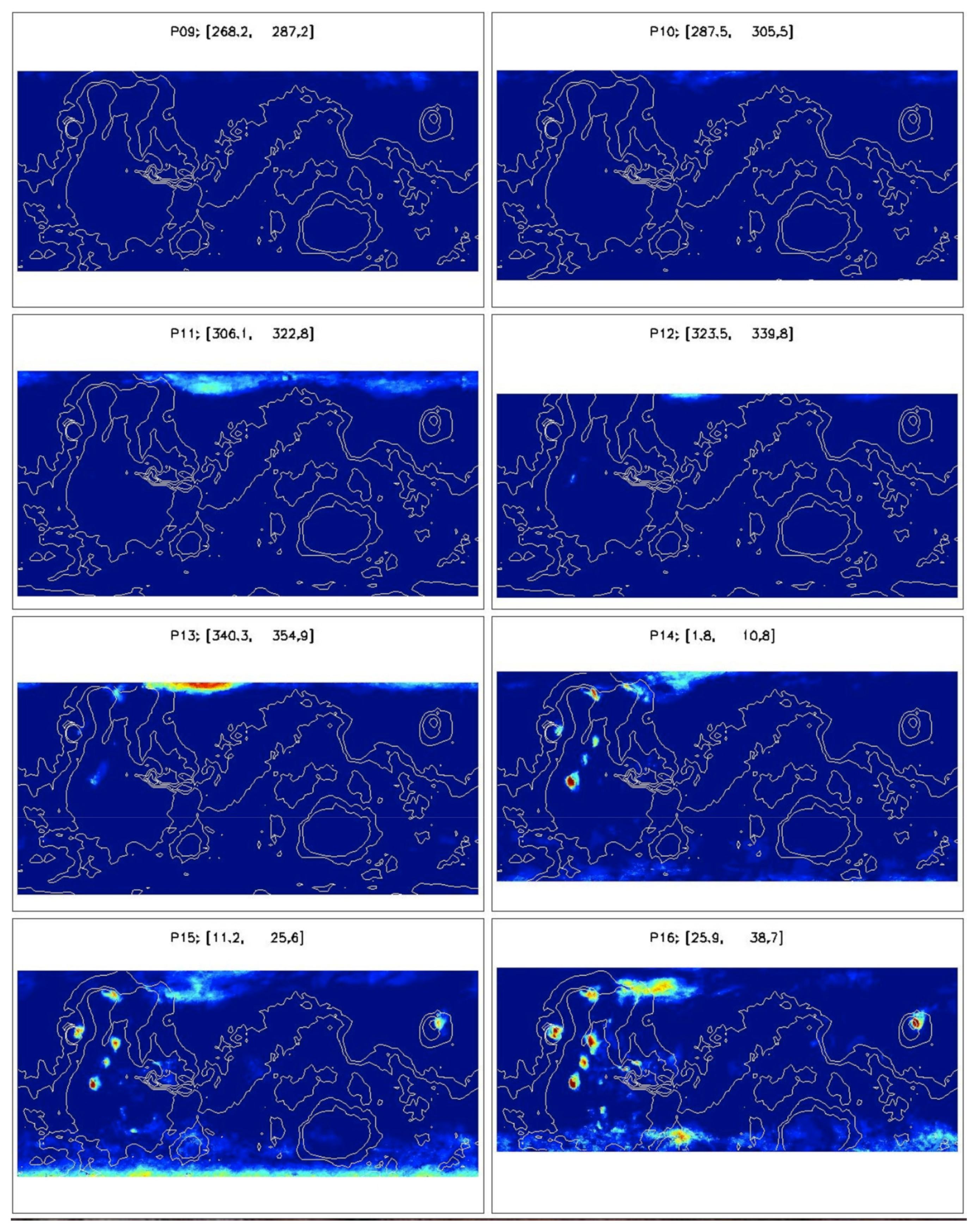
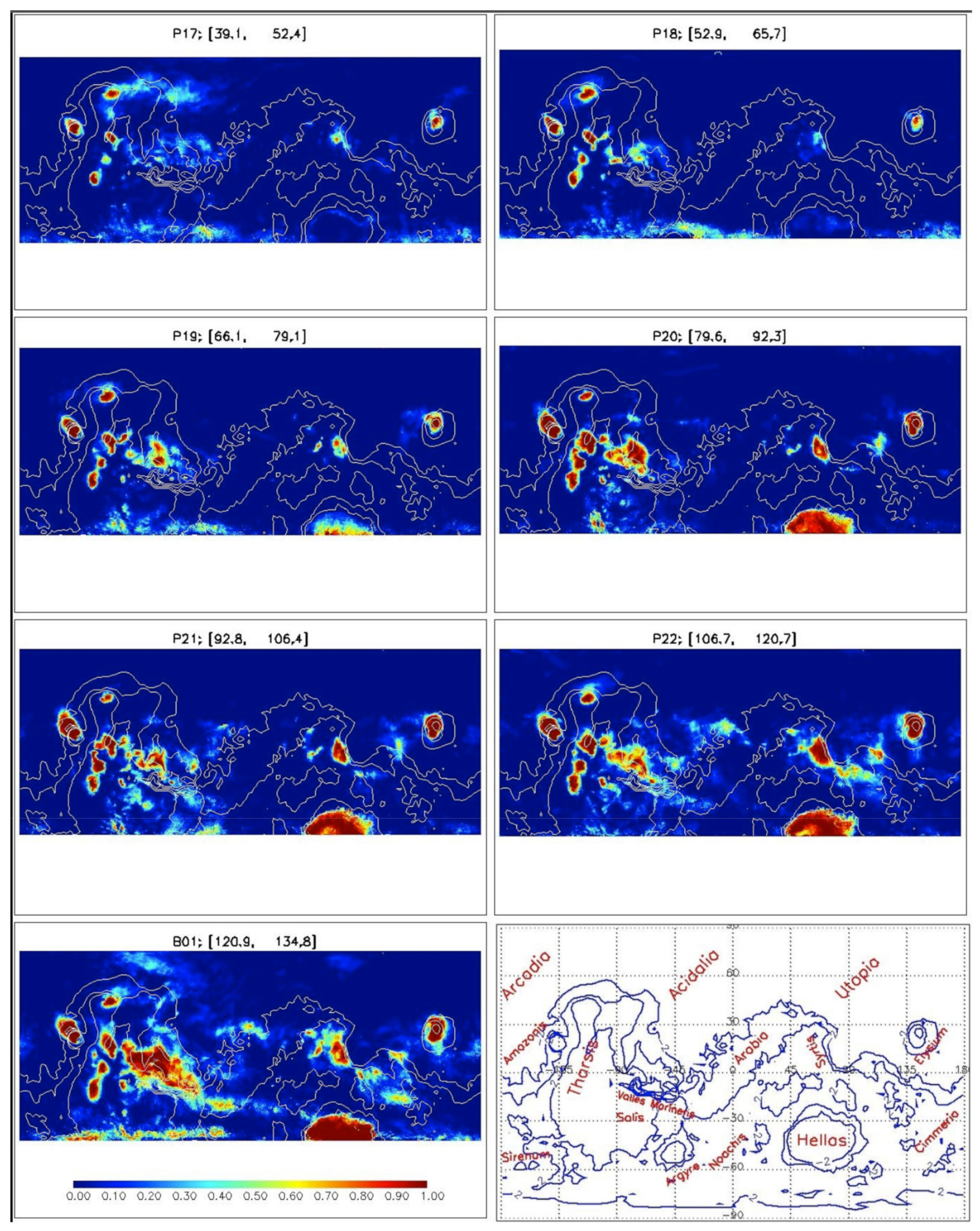
Monthly cloud occurrence frequency represents how often clouds occur at each location. It demonstrates the cloud belt’s development in northern spring, peak in early/mid northern summer, and decay in late northern summer. From this perspective, the cloud belt appears zonally noncontiguous and meandrous. A notable cloud branch diverts from the main cloud belt and extends from Valles Marineris toward Noachis during Ls = 93°–143°. These observations highlight the need to better characterize the zonal variability of the tropical cloud belt.
It should be noted that the MARCI images used in the MDGMs are taken from the 0300–1500 LT sun-synchronous MRO orbit. The Martian atmosphere has a rich mix of vigorous thermal tides which will be aliased into observations made at nearly fixed local time [
47,
48]. As clouds and thermal tides are intricately linked with each other [
4,
45], it is inevitable that the effects of thermal tides are embedded within MDGMs’ cloud observations. Apparent zonal variations are observed in temperatures sampled at fixed local time [
47,
48,
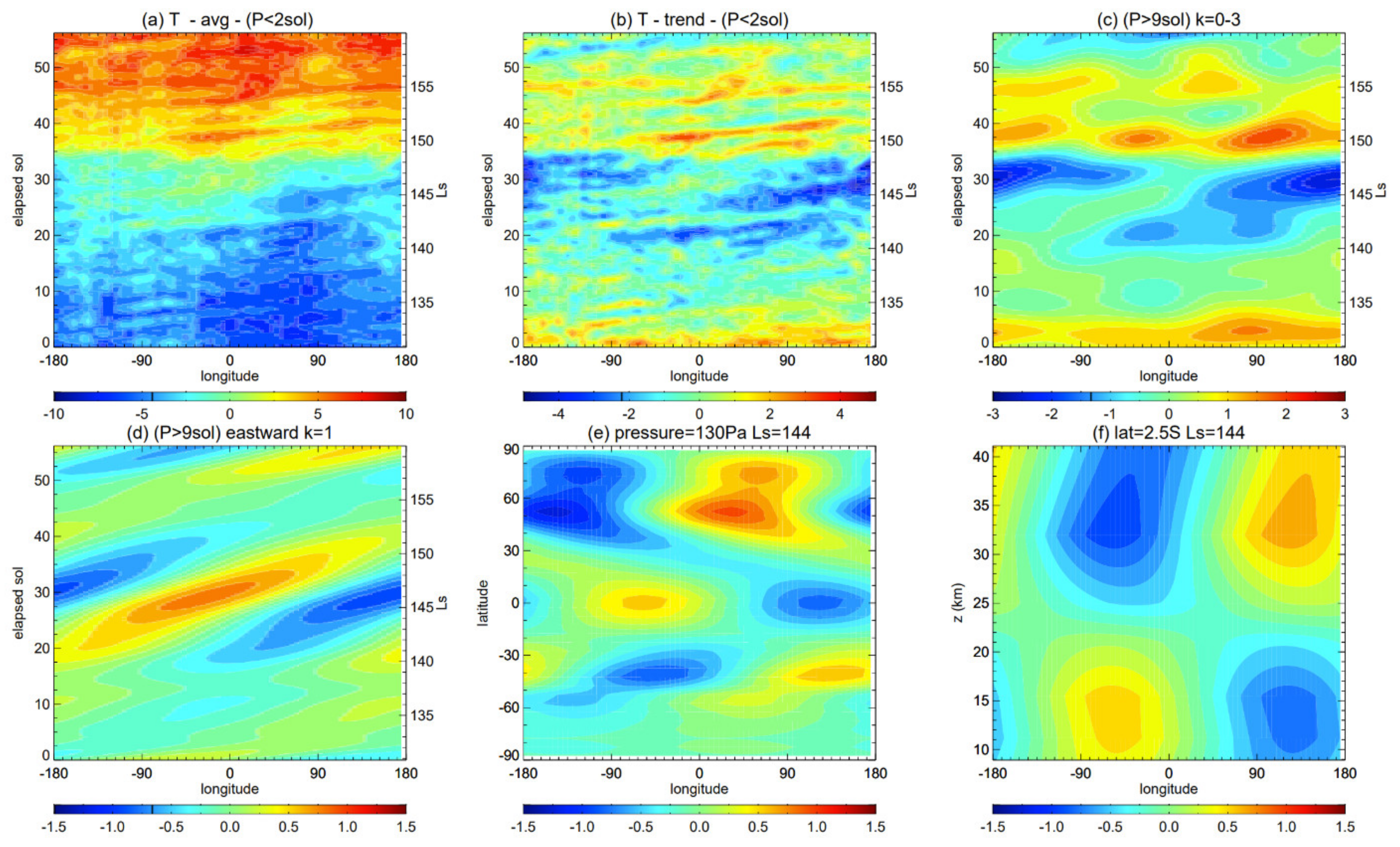
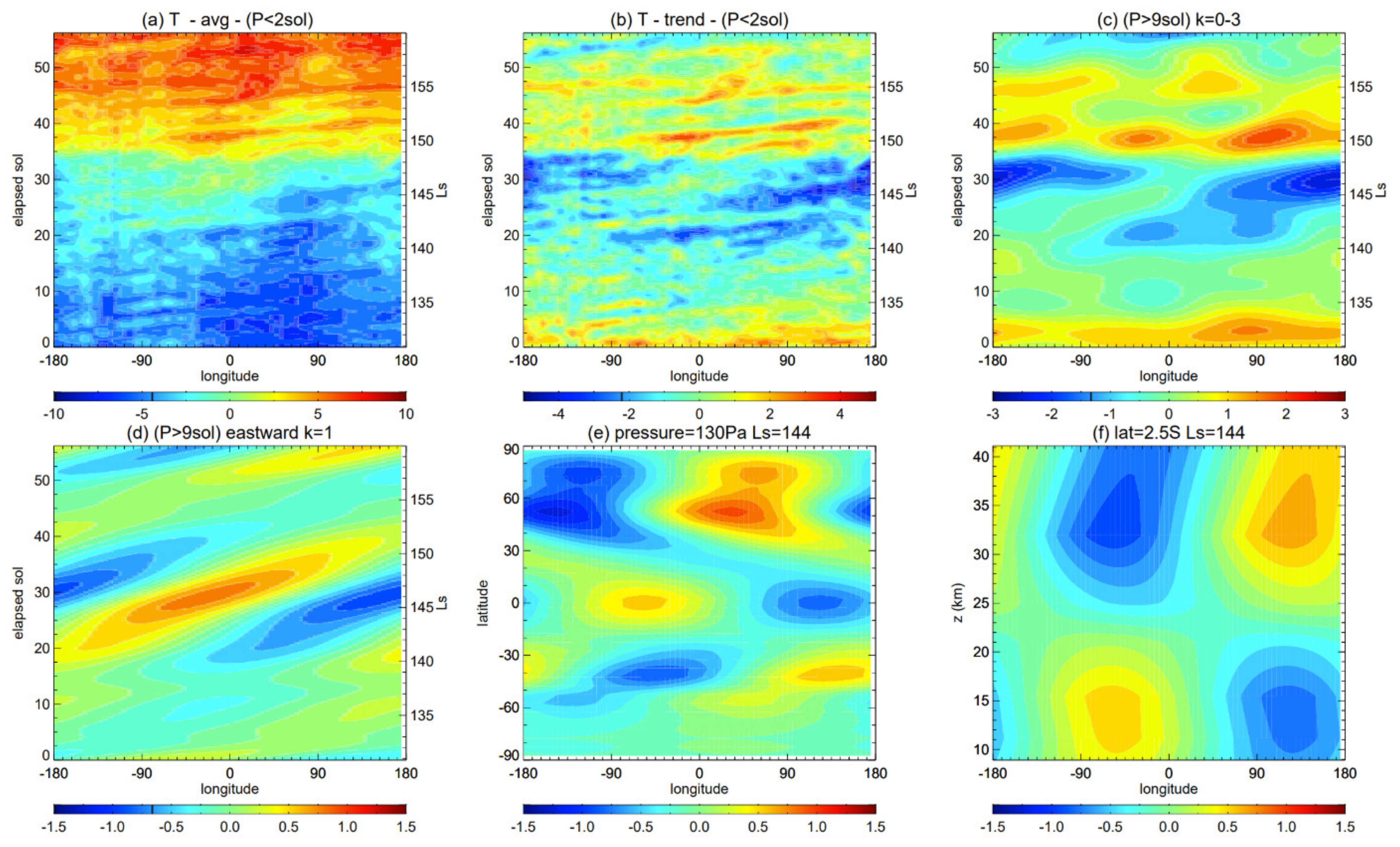
49]. Warmer temperatures would favor gaps or underdeveloped sectors in the tropical cloud belt if the clouds are sensitive enough to the perturbations. However, the pattern of the eddy temperatures changes significantly with altitude due to tidal modes of different wavelengths and phases (
Figure S5), thus, the relationship between clouds and thermal tides can be quite complicated, and requires further study.
The cloud masks can qualitatively differentiate how reflective clouds are, and thus serve as a proxy for cloud optical thickness. The major volcanoes show the brightest clouds, followed by the general Valles Marineris and Syrtis Major regions. These regions also tend to have the most frequent cloud cover. However, there are also regions where thick clouds occur infrequently or thin clouds occur frequently. The information may become lost in a simple time mean. The low latitude clouds in the mean cloud masks appear to be less spatially extensive than those in the MARCI UV optical depths [
14]. Among other possibilities, this probably reflects the higher sensitivity of the UV images than the blue images to clouds.
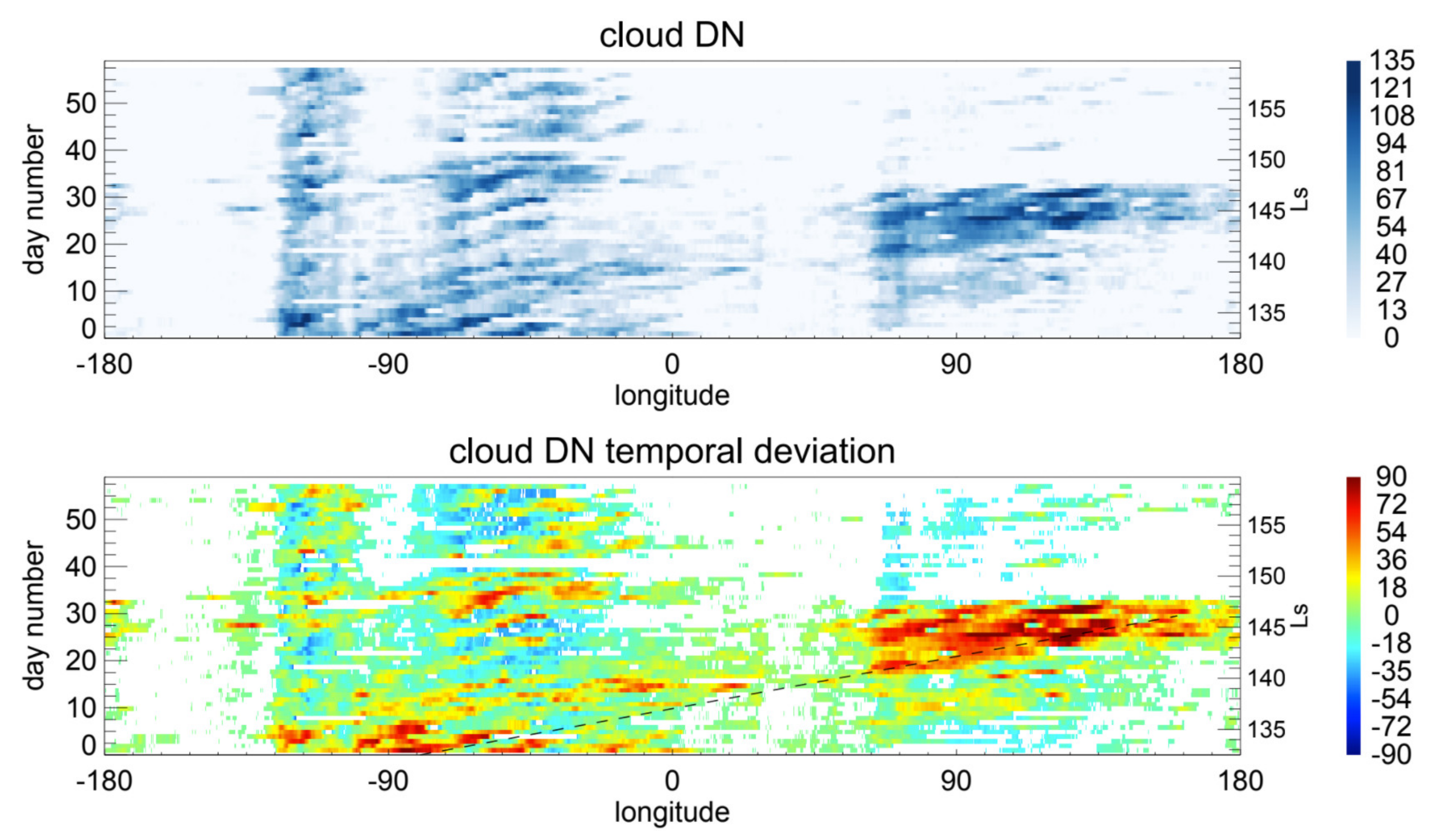
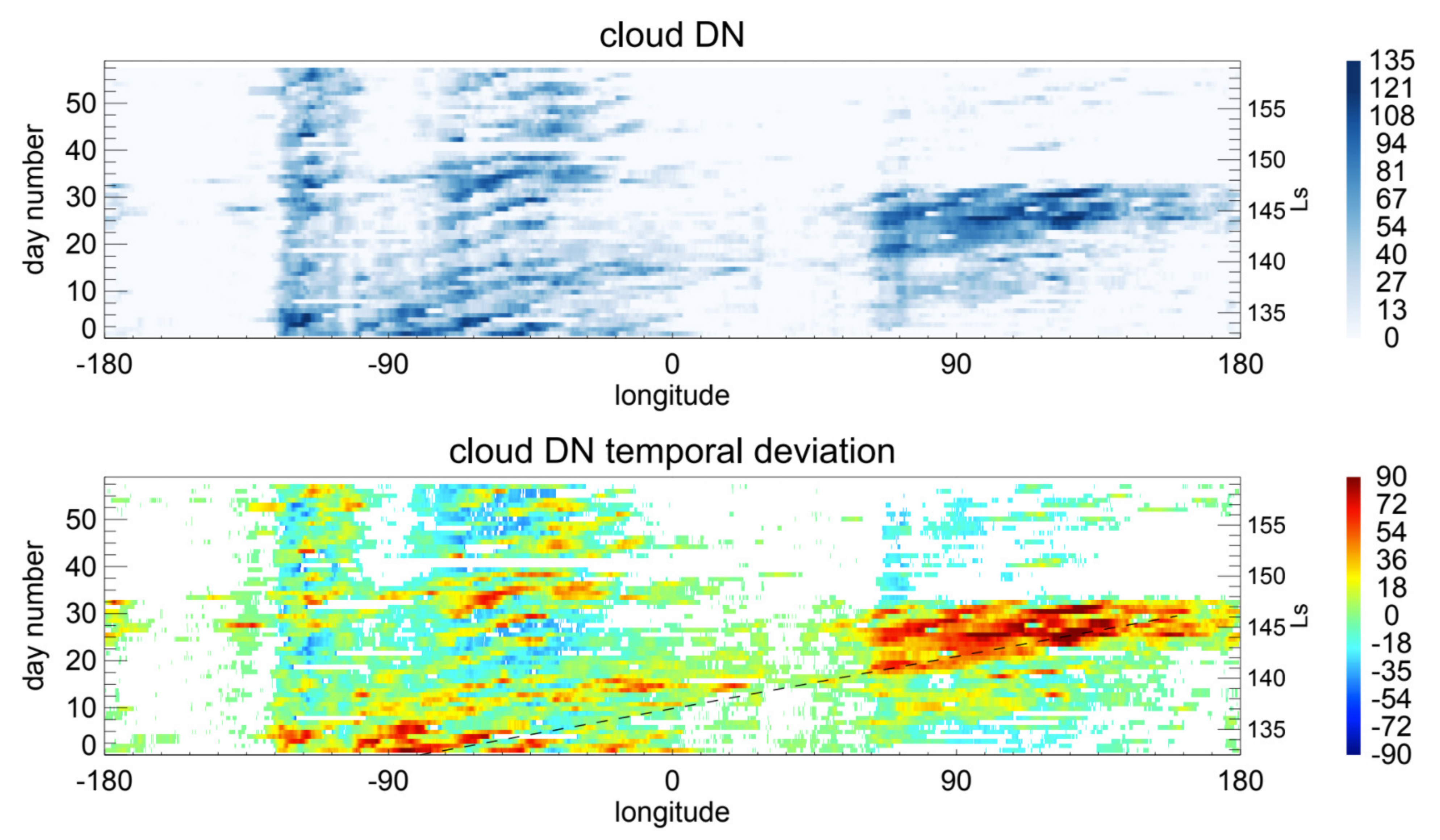
An interesting finding is the zonal oscillation of the clouds within the tropical cloud belt. During the decay of the tropical cloud belt in MY 28, apparent cloud brightening is observed in the eastern hemisphere (in and east of Syrtis Major) while clouds in the western hemisphere (around Valles Marineris) are suppressed. Cloud brightening in Syrtis Major was mentioned before for the MGS era [
20], and several papers reported a related phenomenon called “blue clearing” where the disappearance of clouds in Syrtis Major reveals the surface albedo feature in telescopic images [
50,
51]. However, cloud brightening and blue clearing were not previously recognized as part of an oscillation within the tropical cloud belt. In this paper, the tropical cloud oscillation is found to occur each Mars year around L
s ~140° and last for a few degrees of L
s between MY 24 and MY 32, except for MY 27 and 29 when intense dust storms disrupted the pattern. The oscillation may be easier to spot in images during the disintegration of the tropical cloud belt because the distribution of clouds during this time period is quite sensitive to the temperature perturbations associated with eddies [
52]. However, additional large-scale long-period tropical cloud oscillations may exist before L
s ~140° each year (
Figure S4).
The oscillation of the tropical cloud belt appears to be associated with an eastward propagating zonal wavenumber
k = 1 with a wave period P between 20 and 30 sols. The wave is symmetric about the equator and is confined within 10°–15° N/S. The wave structure conforms to that of an equatorial Kelvin wave. Previous studies of Kelvin waves in the Martian atmosphere are mostly about the diurnal or semidiurnal non-migrating thermal tides, e.g., [
49,
53,
54,
55,
56]. A P = 2.5 sol Kelvin wave was also identified in the middle and upper atmosphere [
57]. The Kelvin wave discussed here has a much narrower latitudinal width and a much longer wave period. It coexists with other circulation components to affect atmospheric conditions and can be an important factor for the intra-seasonal variability of the Martian tropical cloud belt.
The wide-angle MARCI images provide only limited local time coverage; however, change in clouds with local time is still observable. The signal is hidden in the cloud mask as a highly regular 5-day traveling wave that stems from the convolution of the diurnal cycle of Martian clouds and the orbital cycle of the MRO spacecraft. The argument was previously used to explain an artificial signal in the clouds observed in MGS MOC wide angle images [
21]. It should be noted that eddies with periodicity around 5 sols are present in the data assimilation products (
Figure 8 and
Figure S3), thus, physical presence of the wave cannot be ruled out. However, it is not clear if or by how much the assimilations are affected by the forcing periodicity of the input MRO data. Additional data from different satellite orbits may help clarify.
Cloud masks do not contain quantitative optical depths due to the nature of MDGMs. Nevertheless, cloud masks derived here can be useful for a number of applications, such as analyzing cloud distributions, comparing with simulation results and other observations, filtering in or filter out clouds for various applications,
Supplementing Information from other datasets, training and testing machine learning algorithms, etc. It is hoped that the product can be helpful for the community to better understand the Martian atmosphere. The cloud masks can be found on Harvard Dataverse at
https://doi.org/10.7910/DVN/WU6VZ8 (accessed on 29 July 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}