Documentation of Archaeology-Specific Workflow for Airborne LiDAR Data Processing



Abstract
1. Introduction
2. Materials and Methods
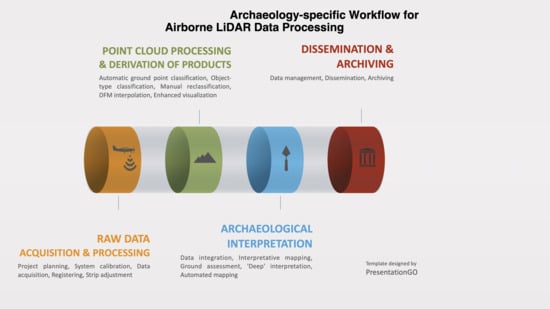
2.1. Workflow
2.2. Raw data Acquisition and Processing (1.1–1.5)
2.3. Point Cloud Processing and Derivation of the Products (2.1–2.5)
2.4. Archaeological Interpretation (3.1–3.5)
2.5. Dissemination and Archiving (4.1–4.3)
2.6. Workflow Implementation
3. Results: Documenting the Research Process
3.1. Project Documentation
3.2. Raw Data Acquisition and Processing (1.1–1.5)
3.3. Point Cloud Processing and Derivation of Products (2.1–2.5)
3.4. Archaeological Interpretation (3.1–3.5)
3.4.1. Interpretative Mapping (3.2)
3.4.2. Ground Assessment (3.3)
3.4.3. Other (3.1, 3.4, 3.5)
3.5. Dissemination and Archiving (4.1–4.3)
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cohen, A.; Klassen, S.; Evans, D. Ethics in Archaeological Lidar. J. Comput. Appl. Archaeol. 2020, 3, 76–91. [Google Scholar] [CrossRef]
- Chase, A.S.Z.; Chase, D.; Chase, A. Ethics, New Colonialism, and Lidar Data: A Decade of Lidar in Maya Archaeology. J. Comput. Appl. Archaeol. 2020, 3, 51–62. [Google Scholar] [CrossRef]
- Crutchley, S. Light Detection and Ranging (lidar) in the Witham Valley, Lincolnshire: An Assessment of New Remote Sensing Techniques. Archaeol. Prospect. 2006, 13, 251–257. [Google Scholar] [CrossRef]
- Challis, K.; Carey, C.; Kincey, M.; Howard, A.J. Assessing the preservation potential of temperate, lowland alluvial sediments using airborne lidar intensity. J. Archaeol. Sci. 2011, 38, 301–311. [Google Scholar] [CrossRef]
- Inomata, T.; Triadan, D.; Vázquez López, V.A.; Fernandez-Diaz, J.C.; Omori, T.; Méndez Bauer, M.B.; García Hernández, M.; Beach, T.; Cagnato, C.; Aoyama, K. Monumental architecture at Aguada Fénix and the rise of Maya civilization. Nature 2020, 582, 530–533. [Google Scholar] [CrossRef] [PubMed]
- Stanton, T.W.; Ardren, T.; Barth, N.C.; Fernandez-Diaz, J.C.; Rohrer, P.; Meyer, D.; Miller, S.J.; Magnoni, A.; Pérez, M. “Structure” density, area, and volume as complementary tools to understand Maya Settlement: An analysis of lidar data along the great road between Coba and Yaxuna. J. Archaeol. Sci. Rep. 2020, 29, 102178. [Google Scholar] [CrossRef]
- Evans, D. Airborne laser scanning as a method for exploring long-term socio-ecological dynamics in Cambodia. J. Archaeol. Sci. 2016, 74, 164–175. [Google Scholar] [CrossRef]
- Rom, J.; Haas, F.; Stark, M.; Dremel, F.; Becht, M.; Kopetzky, K.; Schwall, C.; Wimmer, M.; Pfeifer, N.; Mardini, M.; et al. Between Land and Sea: An Airborne LiDAR Field Survey to Detect Ancient Sites in the Chekka Region/Lebanon Using Spatial Analyses. Open Archaeol. 2020, 6, 248–268. [Google Scholar] [CrossRef]
- Gheyle, W.; Stichelbaut, B.; Saey, T.; Note, N.; Van den Berghe, H.; Van Eetvelde, V.; Van Meirvenne, M.; Bourgeois, J. Scratching the surface of war. Airborne laser scans of the Great War conflict landscape in Flanders (Belgium). Appl. Geogr. 2018, 90, 55–68. [Google Scholar] [CrossRef]
- Gillings, M.; Hacıgüzeller, P.; Lock, G. (Eds.) Re-Mapping Archaeology; Routledge: London, UK, 2018. [Google Scholar]
- Štular, B.; Lozić, E. Comparison of Filters for Archaeology-Specific Ground Extraction from Airborne LiDAR Point Clouds. Remote Sens. 2020, 12, 3025. [Google Scholar] [CrossRef]
- Doneus, M. Die hinterlassene Landschaft. Prospektion und Interpretation in der Landschaftsarchäologie; Verlag der Österreichischen Akademie der Wissenschaften: Vienna, Austria, 2013. [Google Scholar]
- Doneus, M.; Kühtreiber, T. Interpreting Archaeological Topography. Airborne Laser Scanning, 3D Data and Ground Observation. In Interpreting Archaeological Topography. Airborne Laser Scanning, 3D Data and Ground Observation; Opitz, R.S., Cowley, D.C., Eds.; Oxbow Books: Oxford, UK, 2013; pp. 33–50. [Google Scholar]
- Opitz, R.S.; Cowley, D.C. Interpreting archaeological topography: Lasers, 3D data, observation, visualisation and applications. In Interpreting Archaeological Topography. Airborne Laser Scanning, 3D Data and Ground Observation; Opitz, R.S., Cowley, D.C., Eds.; Oxbow Books: Oxford, UK, 2013; pp. 1–13. ISBN 978-1-84217-516-3. [Google Scholar]
- Doneus, M.; Mandlburger, G.; Doneus, N. Archaeological Ground Point Filtering of Airborne Laser Scan Derived Point-Clouds in a Difficult Mediterranean Environment. J. Comput. Appl. Archaeol. 2020, 3, 92–108. [Google Scholar] [CrossRef]
- Doneus, M.; Briese, C. Airborne Laser Scanning in forested areas—potential and limitations of an archaeological prospection technique. In Remote Sensing for Archaeological Heritage Management. Proceedings of the 11th EAC Heritage Management Symposium, Reykjavík, Iceland, 25–27 March 2010; EAC Occasional Paper; Cowley, D.C., Ed.; Europae Archaeologia Consilium (EAC): Brussel, Belgium, 2011; pp. 59–76. ISBN 978-963-9911-20-8. [Google Scholar]
- McKeague, P.; Corns, A.; Larsson, Å.; Moreau, A.; Posluschny, A.; Daele, K.V.; Evans, T. One Archaeology: A Manifesto for the Systematic and Effective Use of Mapped Data from Archaeological Fieldwork and Research. Information 2020, 11, 222. [Google Scholar] [CrossRef]
- Hammersley, M. The issue of quality in qualitative research. Int. J. Res. Method Educ. 2007, 30, 287–305. [Google Scholar] [CrossRef]
- Friedhoff, S.; Meier zu Verl, C.; Pietsch, C.; Meyer, C.V.; Liebig, S. Social Research Data. Documentation, Management, and Technical Implementation within the SFB 882; University of Bielefeld, Faculty of Sociology: Bielefeld, Germany, 2013; pp. 1–3. [Google Scholar]
- Štular, B.; Lozić, E. Primernost podatkov projekta Lasersko skeniranje Slovenije za arheološko interpretacijo: Metoda in študijski primer (The Suitability of Laser Scanning of Slovenia Data for Archaeological Interpretation: Method and a Case Study). In Digitalni Podatki; Ciglič, R., Geršič, M., Perko, D., Zorn, M., Eds.; Geografski Inštitut Antona Melika ZRC SAZU: Ljubljana, Slovenia, 2016; pp. 157–166. ISBN 978-961-254-929-9. [Google Scholar]
- Grammer, B.; Draganits, E.; Gretscher, M.; Muss, U. LiDAR-guided Archaeological Survey of a Mediterranean Landscape: Lessons from the Ancient Greek Polis of Kolophon (Ionia, Western Anatolia). Archaeol. Prospect. 2017, 24, 311–333. [Google Scholar] [CrossRef]
- Denard, H. Implementing Best Practice in Cultural Heritage Visualisation: The London Charter. In Good Practice in Archaeological Diagnostics. Non-Invasive Survey of Complex Archaeological Sites; Corsi, C., Slapšak, B., Vermeulen, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 255–268. ISBN 978-3-319-01784-6. [Google Scholar]
- Apollonio, F.I.; Giovannini, E.C. A paradata documentation methodology for the Uncertainty Visualization in digital reconstruction of CH artifacts. SCIRES-IT Sci. Res. Inf. Technol. 2015, 5. [Google Scholar] [CrossRef]
- Richards-Rissetto, H. What can GIS + 3D mean for landscape archaeology? J. Archaeol. Sci. 2017, 84, 10–21. [Google Scholar] [CrossRef]
- Wilkinson, M.D.; Dumontier, M.; Aalbersberg, I.J.J.; Appleton, G.; Axton, M.; Baak, A.; Blomberg, N.; Boiten, J.-W.; da Silva Santos, L.B.; Bourne, P.E. The FAIR Guiding Principles for scientific data management and stewardship. Sci. Data 2016, 3. [Google Scholar] [CrossRef]
- Gregory, K.; Groth, P.; Scharnhorst, A.; Wyatt, S. Lost or Found? Discovering Data Needed for Research. Harv. Data Sci. Rev. 2020, 2. [Google Scholar] [CrossRef]
- Crutchley, S.; Crow, P. The Light Fantastic: Using Airborne Laser Scanning in Archaeological Survey; English Heritage: Swindon, UK, 2010; pp. 17–27. [Google Scholar]
- Opitz, R.S. An overview of airborne and terrestrial laser scanning in archaeology. In Interpreting Archaeological Topography. Airborne Laser Scanning, 3D Data and Ground Observation; Opitz, R.S., Cowley, D.C., Eds.; Oxbow Books: Oxford, UK, 2013; pp. 13–31. ISBN 978-1-84217-516-3. [Google Scholar]
- Fernandez-Diaz, J.C.; Carter, W.E.; Shrestha, R.L.; Glennie, C.L. Now You See It… Now You Don’t: Understanding Airborne Mapping LiDAR Collection and Data Product Generation for Archaeological Research in Mesoamerica. Remote Sens. 2014, 6, 9951–10001. [Google Scholar] [CrossRef]
- Doneus, M.; Briese, C. Full-waveform airborne laser scanning as a tool for archaeological reconnaissance. In From Space to Place: 2nd International Conference on Remote Sensing in Archaeology: Proceedings of the 2nd International Workshop, CNR, Rome, Italy, 4–7 December 2006; Campana, S., Forte, M., Eds.; British Archaeological Reports (BAR) International Series; Archaeopress: Oxford, UK, 2006; pp. 99–105. [Google Scholar]
- Wehr, A. LiDAR Systems and Calibration. In Topographic Laser Ranging and Scanning: Principles and Processing; Shan, J., Toth, C.K., Eds.; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group: London, UK; Taylor & Francis Group: New York, NY, USA, 2018; pp. 159–200. ISBN 978-1-4987-7227-3. [Google Scholar]
- Toth, C.K.; Koppanyi, Z. Strip Adjustment. In Topographic Laser Ranging and Scanning: Principles and Processing; Shan, J., Toth, C.K., Eds.; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group: London, UK; Taylor & Francis Group: New York, NY, USA, 2018; pp. 259–290. ISBN 978-1-4987-7227-3. [Google Scholar]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare—Earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Hightower, J.; Butterfield, A.; Weishampel, J. Quantifying Ancient Maya Land Use Legacy Effects on Contemporary Rainforest Canopy Structure. Remote Sens. 2014, 6, 10716–10732. [Google Scholar] [CrossRef]
- Buján, S.; Cordero, M.; Miranda, D. Hybrid Overlap Filter for LiDAR Point Clouds Using Free Software. Remote Sens. 2020, 12, 1051. [Google Scholar] [CrossRef]
- Dong, P.; Chen, Q. LiDAR Remote Sensing and Applications; Taylor & Francis Series in Remote Sensing Applications; CRC Press: Boca Raton, FL, USA, 2018; pp. 46–61. ISBN 978-1-4822-4301-7. [Google Scholar]
- Johnson, K.M.; Ouimet, W.B. An observational and theoretical framework for interpreting the landscape palimpsest through airborne LiDAR. Appl. Geogr. 2018, 91, 32–44. [Google Scholar] [CrossRef]
- Rutkiewicz, P.; Malik, I.; Wistuba, M.; Osika, A. High concentration of charcoal hearth remains as legacy of historical ferrous metallurgy in southern Poland. Quat. Int. 2019, 512, 133–143. [Google Scholar] [CrossRef]
- Pingel, T.J.; Clarke, K.; Ford, A. Bonemapping: A LiDAR Processing and Visualization Technique in Support of Archaeology Under the Canopy. Cartogr. Geogr. Inf. Sci. 2015, 42, 18–26. [Google Scholar] [CrossRef]
- Štular, B.; Kokalj, Ž.; Oštir, K.; Nuninger, L. Visualization of lidar-derived relief models for detection of archaeological features. J. Archaeol. Sci. 2012, 39, 3354–3360. [Google Scholar] [CrossRef]
- Kokalj, Ž.; Hesse, R. Prostor, Kraj, Čas. In Airborne Laser Scanning Raster Data Visualization: A Guide to Good Practice; Založba ZRC: Ljubljana, Slovenia, 2017; ISBN 978-961-254-984-8. [Google Scholar]
- Banaszek, Ł.; Cowley, D.C.; Middleton, M. Towards National Archaeological Mapping. Assessing Source Data and Methodology-A Case Study from Scotland. Geosciences 2018, 8, 272. [Google Scholar] [CrossRef]
- Laharnar, B.; Lozić, E.; Štular, B. A structured Iron Age landscape in the hinterland of Knežak, Slovenia. In Rural Settlement: Relating Buildings, Landscape, and People in the European Iron Age; Cowley, D.C., Fernández-Götz, M., Romankiewicz, T., Wendling, H., Eds.; Sidestone Press: Leiden, The Netherlands, 2019; pp. 263–272. ISBN 978-90-8890-820-0. [Google Scholar]
- Kokalj, Z.; Somrak, M. Why Not a Single Image? Combining Visualizations to Facilitate Fieldwork and On-Screen Mapping. Remote Sens. 2019, 11, 747. [Google Scholar] [CrossRef]
- Davis, D.S.; DiNapoli, R.J.; Sanger, M.C.; Lipo, C.P. The Integration of Lidar and Legacy Datasets Provides Improved Explanations for the Spatial Patterning of Shell Rings in the American Southeast. Adv. Archaeol. Pract. 2020, 8, 361–375. [Google Scholar] [CrossRef]
- Musson, C.; Palmer, R.; Campana, S. Flights into the Past. Aerial Photography, Photo Interpretation and Mapping for Archaeology; Occasional Publication; Aerial Archaeology Research Group: York, UK, 2013; ISBN 978-3-00-044479-1. [Google Scholar]
- Verhoeven, G.; Sevara, C. Trying to Break New Ground in Aerial Archaeology. Remote Sens. 2016, 8, 918. [Google Scholar] [CrossRef]
- Bofinger, J.; Hesse, R. As far as the laser can reach… Laminar analysis of LiDAR detected structures as a powerful instrument for archaeological heritage management in Baden-Württemberg, Germany. In Remote Sensing for Archaeological Heritage Management. Proceedings of the 11th EAC Heritage Management Symposium, Reykjavík, Iceland, 25–27 March 2010; Cowley, D.C., Ed.; EAC Occasional Paper; Europae Archaeologia Consilium (EAC): Brussel, Belgium, 2011; pp. 162–171. ISBN 978-963-9911-20-8. [Google Scholar]
- Laharnar, B.; Štular, B.; Mlinar, M. Gradič above Kobarid—A late republican fortified emporium? = Gradič nad Kobaridom, poznorepublikanski utrjeni emporij? In Evidence of the Roman Army in Slovenia = Sledovi Rimske Vojske na Slovenskem; Istenič, J., Laharnar, B., Horvat, J., Eds.; Katalogi in monografije/Catalogi et monographiae; Narodni Muzej Slovenije: Ljubljana, Slovenia, 2015; pp. 243–256. ISBN 978-961-6169-97-4. [Google Scholar]
- Thompson, A.E. Detecting Classic Maya Settlements with Lidar-Derived Relief Visualizations. Remote Sens. 2020, 12, 2838. [Google Scholar] [CrossRef]
- Bowden, M.; McOmish, D. A British Tradition? Mapping the Archaeological Landscape. Landscapes 2011, 12, 20–40. [Google Scholar] [CrossRef]
- Stewart Ainsworth, A.O.; Went, D. Remotely acquired, nor remotely sensed: Using lidar as a field survey tool. In Interpreting Archaeological Topography. Airborne Laser Scanning, 3D Data and Ground Observation; Opitz, R.S., Cowley, D.C., Eds.; Oxbow Books: Oxford, UK, 2013; pp. 206–222. ISBN 978-1-84217-516-3. [Google Scholar]
- Fradley, M. The eye of the beholder: Experience, encounter and objectivity in archaeo-topographical survey. In Re-Mapping Archaeology; Gillings, M., Hacıgüzeller, P., Lock, G., Eds.; Routledge: London, UK, 2018; pp. 97–166. ISBN 978-1-351-26771-7. [Google Scholar]
- Verhagen, P. Site Discovery and Evaluation Through Minimal Interventions: Core Sampling, Test Pits and Trial Trenches. In Good Practice in Archaeological Diagnostics. Non-Invasive Survey of Complex Archaeological Sites; Corsi, C., Slapšak, B., Vermeulen, F., Eds.; Springer: New York, NY, USA, 2013; pp. 209–226. ISBN 978-3-319-01784-6. [Google Scholar]
- Johnson, M. Landscape studies: The future of the field. In Landscape Archaeology between Art and Science. From a Multi- to an Interdisciplinary Approach; Kluiving, S.J., Guttmann-Bond, E.B., Eds.; Amsterdam University Press: Amsterdam, The Netherlands, 2012; pp. 515–525. ISBN 978-90-8964-418-3. [Google Scholar]
- Štular, B. The use of lidar-derived relief models in archaeological topography. The Kobarid region (Slovenia) case study (Uporaba modelov reliefa pridobljenih z lidarskim snemanjem v arheološki topografiji. Študijski primer Kobariške). Arheol. Vestn. Acta Archaeol. 2011, 62, 393–432. [Google Scholar]
- Sevara, C.; Pregesbauer, M. Archaeological feature classification: An object oriented approach. S. East. Eur. J. Earth Obs. Geomat. 2014, 3, 139–143. [Google Scholar]
- Lambers, K.; der Vaart, W.V.; Bourgeois, Q. Integrating Remote Sensing, Machine Learning, and Citizen Science in Dutch Archaeological Prospection. Remote Sens. 2019, 11, 794. [Google Scholar] [CrossRef]
- Sevara, C.; Pregesbauer, M.; Doneus, M.; Verhoeven, G.; Trinks, I. Pixel versus object—A comparison of strategies for the semi-automated mapping of archaeological features using airborne laser scanning data. J. Archaeol. Sci. Rep. 2016, 5, 485–498. [Google Scholar] [CrossRef]
- Davis, D.S. Object-based image analysis: A review of developments and future directions of automated feature detection in landscape archaeology. Archaeol. Prospect. 2018, 26, 155–163. [Google Scholar] [CrossRef]
- Albrecht, C.M.; Fisher, C.; Freitag, M.; Hamann, H.F.; Pankanti, S.; Pezzutti, F.; Rossi, F. Learning and Recognizing Archeological Features from LiDAR Data. Proc. IEEE 2019. [Google Scholar] [CrossRef]
- Boer, A.D. Using pattern recognition to search LIDAR data for archeological sites. In The World Is in Your Eyes. CAA2005. Computer Applications and Quantitative Methods in Archaeology, Proceedings of the 33rd Conference, Tomar, March 2005; Figueiredo, A., Leite Velho, G., Eds.; CAA Portugal: Tomar, Portugal, 2005; pp. 245–254. [Google Scholar]
- Riley, M.A.; Artz, J.A. LiDAR Surveyor: A Tool for Automated Archaeological Feature Extraction from Light Detection and Ranging (LiDAR) Elevation Data; Office of the State Archaeologist, The University of Iowa: Iowa City, IA, USA, 2012. [Google Scholar]
- Trier, Ø.D.; Zortea, M.; Tonning, C. Automatic detection of mound structures in airborne laser scanning data. J. Archaeol. Sci. Rep. 2015, 2, 69–79. [Google Scholar] [CrossRef]
- Freeland, T.; Heung, B.; Burley, D.V.; Clark, G.; Knudby, A. Automated feature extraction for prospection and analysis of monumental earthworks from aerial LiDAR in the Kingdom of Tonga. J. Archaeol. Sci. 2016, 69, 64–74. [Google Scholar] [CrossRef]
- Cerrillo-Cuenca, E. An approach to the automatic surveying of prehistoric barrows through LiDAR. Quat. Int. 2017, 435, 135–145. [Google Scholar] [CrossRef]
- Guyot, A.; Hubert-Moy, L.; Lorho, T. Detecting Neolithic Burial Mounds from LiDAR-Derived Elevation Data Using a Multi-Scale Approach and Machine Learning Techniques. Remote Sens. 2018, 10, 225. [Google Scholar] [CrossRef]
- Niculita, M. Geomorphometric Methods for Burial Mound Recognition and Extraction from High Resolution LiDAR DEMs. Sensors 2020, 20, 1192. [Google Scholar] [CrossRef]
- Schneider, A.; Takla, M.; Nicolay, A.; Raab, A.; Raab, T. A Template-matching Approach Combining Morphometric Variables for Automated Mapping of Charcoal Kiln Sites. Archaeol. Prospect. 2014, 22, 45–62. [Google Scholar] [CrossRef]
- Witharana, C.; Ouimet, W.B.; Johnson, K.M. Using LiDAR and GEOBIA for automated extraction of eighteenth-late nineteenth century relict charcoal hearths in southern New England. GIScience Remote Sens. 2018, 55, 183–204. [Google Scholar] [CrossRef]
- Davis, D.S.; Lipo, C.P.; Sanger, M.C. A comparison of automated object extraction methods for mound and shell-ring identification in coastal South Carolina. J. Archaeol. Sci. Rep. 2019, 23, 166–177. [Google Scholar] [CrossRef]
- Trier, Ø.D.; Pilø, L.H. Automatic Detection of Pit Structures in Airborne Laser Scanning Data. Archaeol. Prospect. 2012, 19, 103–121. [Google Scholar] [CrossRef]
- Gallwey, J.; Yeomans, C.; Tonkins, M.; Coggan, J.; Vogt, D.; Eyre, M. Using Deep Learning and Hough Transformations to Infer Mineralised Veins from LIDAR Data Over Historic Mining Areas. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 1561–1568. [Google Scholar] [CrossRef]
- Magnini, L.; Bettineschi, C.; Guio, A.D. Object-based Shell Craters Classification from LiDAR-derived Sky-view Factor. Archaeol. Prospect. 2016, 24, 211–223. [Google Scholar] [CrossRef]
- Vletter, W.F. (Semi) automatic extraction from Airborne Laser Scan data of roads and paths in forested areas. In Second International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2014); Hadjimitsis, D.G., Themistocleous, K., Michaelides, S., Papadavid, G., Eds.; Proceedings of SPIE; SPIE: Washington, DC, USA, 2014; Volume 9229, pp. 92291D-1–92291D-11. [Google Scholar]
- Sherba, J.; Blesius, L.; Davis, J. Object-Based Classification of Abandoned Logging Roads under Heavy Canopy Using LiDAR. Remote Sens. 2014, 6, 4043–4060. [Google Scholar] [CrossRef]
- De Matos-Machado, R.; Toumazet, J.-P.; Bergès, J.-C.; Amat, J.-P.; Arnaud-Fassetta, G.; Bétard, F.; Bilodeau, C.; Hupy, J.P.; Jacquemot, S. War landform mapping and classification on the Verdun battlefield (France) using airborne LiDAR and multivariate analysis. Earth Surf. Process. Landf. 2019, 44. [Google Scholar] [CrossRef]
- Toumazet, J.-P.; Vautier, F.; Roussel, E.; Dousteyssier, B. Automatic detection of complex archaeological grazing structures using airborne laser scanning data. J. Archaeol. Sci. Rep. 2017, 12, 569–579. [Google Scholar] [CrossRef]
- Trier, Ø.D.; Salberg, A.-B.; Pilø, L.H.; Tonning, C.; Johansen, H.M.; Aarsten, D. Semi-automatic mapping of cultural heritage from airborne laser scanning using deep learning. Geophys. Res. Abstr. 2016, 18, 159–186. [Google Scholar]
- Trier, Ø.D.; Cowley, D.C.; Waldeland, A.U. Using deep neural networks on airborne laser scanning data: Results from a case study of semi-automatic mapping of archaeological topography on Arran, Scotland. Archaeol. Prospect. 2018, 26, 165–175. [Google Scholar] [CrossRef]
- Meyer, M.; Pfeffer, I.; Jürgens, C. Automated Detection of Field Monuments in Digital Terrain Models of Westphalia Using OBIA. Geosciences 2019, 9, 109. [Google Scholar] [CrossRef]
- der Vaart, W.B.V.; Lambers, K. Learning to Look at LiDAR: The Use of R-CNN in the Automated Detection of Archaeological Objects in LiDAR Data from the Netherlands. J. Comput. Appl. Archaeol. 2019, 2, 31–40. [Google Scholar] [CrossRef]
- Trier, Ø.D.; Reksten, J.H.; Løseth, K. Automated mapping of cultural heritage in Norway from airborne lidar data using faster R-CNN. Int. J. Appl. Earth Obs. Geoinf. 2021, 95, 102241. [Google Scholar] [CrossRef]
- Bundzel, M.; Jaščur, M.; Kováč, M.; Lieskovský, T.; Sinčák, P.; Tkáčik, T. Semantic Segmentation of Airborne LiDAR Data in Maya Archaeology. Remote Sens. 2020, 12, 3685. [Google Scholar] [CrossRef]
- Tian, B. GIS Technology Applications in Environmental and Earth Sciences; Taylor and Francis, Ltd.: Boca Raton, FL, USA, 2017; ISBN 978-1-4987-7604-2. [Google Scholar]
- Štular, B. Scientific Dissemination of Archaeological Interpretation of Airborne LiDAR-derived Data. A Manifesto. In Critical Archaeology in the Digital Age; Garstky, K., Ed.; The Cotsen Institute of Archaeology Press: Los Angeles, CA, USA, 2021; pp. 185–204. [Google Scholar]
- McKeague, P.; vant Veer, R.; Huvila, I.; Moreau, A.; Verhagen, P.; Bernard, L.; Cooper, A.; Green, C.; van Manen, N. Mapping Our Heritage: Towards a Sustainable Future for Digital Spatial Information and Technologies in European Archaeological Heritage Management. J. Comput. Appl. Archaeol. 2019, 2, 89–104. [Google Scholar] [CrossRef]
- Shaw, R.; Corns, A. Archiving Archaeological Spatial Data: Standards and Metadata. In Making History Interactive. Computer Applications and Quantitative Methods in Archaeology (CAA), Proceedings of the 37th International Conference, Williamsburg, Virginia, United States of America, 22–26 March 2009; Frischer, B., Koller, D., Eds.; BAR International Series; Archaeopress: Williamsburg, NY, USA, 2009; Volume S2079, pp. 22–26. ISBN 978-1-4073-0556-1. [Google Scholar]
- Gillings, M.; Wise, A.; Evans, T.; Halls, P.J.; Niven, K. GIS Guide to Good Practice; ADS Guides to Good Practice; Archaeology Data Service. 2011. Available online: https://guides.archaeologydataservice.ac.uk/g2gp/Gis_Toc (accessed on 27 November 2020).
- Triglav Čekada, M.; Bric, V. Končan je projekt laserskega skeniranj Slovenije. Geod. Vestn. 2015, 59, 586–592. [Google Scholar]
- Gane, C.; Sarson, T. Structured Systems Analysis; Prentice-Hall: Englewood Cliffs, NJ, USA, 1979. [Google Scholar]
- Pegan Žvokelj, P.; Bric, V.; Triglav Čekada, M. Lasersko skeniranje Slovenije (Laser Scanning in Slovenia). Geod. Vestn. 2014, 58, 349–351. [Google Scholar]
- Mivšek, E. Izvedba Laserskega Skeniranja Slovenije. Blok 35—Tehnično Poročilo o Izdelavi Izdelkov; Geodetski Inštitut Slovenije: Ljubljana, Slovenia, 2015. [Google Scholar]
- Lozić, E. Analiza Lidarskih Podatkov za Lokaciji Veliki in Mali Čentur (EŠD 1408); Pokrajinski Muzej Koper: Ljubljana, Slovenia, 2015; Available online: https://www.academia.edu/37228939/Analiza_lidarskih_podatkov_za_lokaciji_Veliki_in_Mali_C_entur_ES_D_1408_ (accessed on 27 November 2020).
- Lozić, E. Arheološka Interpretacija Lidarskih Podatkov za Območje Volčji Grad—Arheološko Najdišče Debela Griža; Vahta d.o.o.: Ljubljana, Slovenia, 2016; Available online: https://www.academia.edu/37228901/Arheolos_ka_interpretacija_lidarskih_podatkov_za_obmoc_je_Volc_ji_Grad_Arheolos_ko_najdis_c_e_Debela_griz_a_ES_D_836_Strokovno_poroc_ilo_o_delu_in_rezultatih (accessed on 27 November 2020).
- Lozić, E. Arheološka Interpretacija Lidarskih Podatkov za Širše Območje med Ambrožem (EŠD 765), Grmačo (EŠD 4740) in Cerkvencami (EŠD 17658) ter Arheološki Območji Vojščica—Tabor (EŠD 4734) in Sela na Krasu—Gradišče Podgrac (EŠD 25710); Občina Miren-Kostanjevica: Ljubljana, Slovenia, 2016; Available online: https://www.academia.edu/37228949/Arheolos_ka_interpretacija_lidarskih_podatkov_za_s_irs_e_obmoc_je_med_Ambroz_em_ES_D_765_Grmac_o_ES_D_4740_in_Cerkvencami_ES_D_17658_ter_arheolos_ki_obmoc_ji_Vojs_c_ica_Tabor_ES_D_4734_in_Sela_na_Krasu_Gradis_c_e_Podgrac_ES_D_25710_ (accessed on 27 November 2020).
- Lozić, E. Analiza in Arheološka Interpretacija Lidarskih Podatkov Zavarovanega Območja Spomenika Kazlje-Gradišče Vahta; Občina Sežana: Ljubljana, Slovenia, 2018; Available online: https://www.academia.edu/37284279/Analiza_in_arheolos_ka_interpretacija_lidarskih_podatkov_zavarovanega_obmoc_ja_spomenika_Kazlje_gradis_c_e_Vahta_EŠD_7283_z_okolico (accessed on 27 November 2020).
- Howard, P. Archaeological Surveying and Mapping. Recording and Depicting the Landscape; Routledge: London, UK; Routledge: New York, NY, USA, 2006; ISBN 978-0-203-41751-5. [Google Scholar]
- Ainsworth, S.; Bowden, M.; McOmish, D.; Pearson, T. Understanding the Archaeology of Landscapes: A guide to Good Recording Practice; English Heritage: London, UK, 2007. [Google Scholar]
- Banning, E.B. Archaeological Survey; Springer: New York, NY, USA, 2002. [Google Scholar] [CrossRef]
- Doneus, M.; Briese, C.; Kühtreiber, T. Flugzeuggetragenes Laserscanning als Werkzeug der archäologischen Kulturlandschaftsforschung. Das Fallbeispiel “Wüste” bei Mannersdorf am Leithagebirge, Niederösterreich. Archaol. Korresp. 2008, 38, 137–156. [Google Scholar]
- Briese, C.; Pfennigbauer, M.; Ullrich, A.; Doneus, M. Radiometric Information from Airborne Laser Scanning for Archaeological Prospection. Int. J. Herit. Digit. Era 2014, 3, 159–178. [Google Scholar] [CrossRef]
- Sevara, C.; Wieser, M.; Doneus, M.; Pfeifer, N. Relative Radiometric Calibration of Airborne LiDAR Data for Archaeological Applications. Remote Sens. 2019, 11, 945. [Google Scholar] [CrossRef]
- Monterroso-Checa, A. Geoarchaeological Characterisation of Sites of Iberian and Roman Cordoba Using LiDAR Data Acquisitions. Geosciences 2019, 9, 205. [Google Scholar] [CrossRef]
- Lieskovský, T.; Faixová Chalachanová, J. The assessment of the chosen LiDAR data sources in Slovakia for the archaeological spatial analysis. In Advances and Trends in Geodesy, Cartography and Geoinformatics II; Molčíková, S., Hurčiková, V., Blišťan, P., Eds.; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group: London, UK; Taylor & Francis Group: New York, NY, USA, 2020; pp. 190–195. [Google Scholar]
- Strijkers, R.; Cushing, R.; Vasyunin, D.; de Laat, C.; Belloum, A.S.Z.; Meijer, R. Toward Executable Scientific Publications. Procedia Comput. Sci. 2011, 4, 707–715. [Google Scholar] [CrossRef]
- Li, K.; Greenberg, J.; Dunic, J. Data objects and documenting scientific processes: An analysis of data events in biodiversity data papers. J. Assoc. Inf. Sci. Technol. 2019, 71, 172–182. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase | Step | [27] | [16] | [28] | [13] | [29] | [20] | [21] | [15] | |
|---|---|---|---|---|---|---|---|---|---|---|
| Raw data acquisition & processing | 1.1 | project planning | project planning | flight planning | project planning | |||||
| 1.2 | system calibration | choice of sensor | system configuration | system calibration | ||||||
| 1.3 | data acquisition | d. acquisition | d. acquisition | d. acquisition 1 | d. acquisition | d. collection | d. acquisition 1 | d. acquisition | ||
| 1.4 | registering | registering | geo-referencing | correlation | d. processing | trajectory determination | geo-referencing | |||
| calibration | ||||||||||
| point cloud production | ||||||||||
| 1.5 | strip adjustment | grid alignment | strip alignment | project binning | flight strip adjustment | |||||
| Point cloud processing & Derivation of products | 2.1 | automatic ground point classification | filtering | filtering | classification (automatic) | d. processing | ground point classification | ground point filtering | classification/ground point filtering | |
| 2.2 | object-type classification | object-type point classification | ||||||||
| 2.3 | manual reclassification | manual classification | manual classification | |||||||
| 2.4 | DFM interpolation | interpolation | interpolation | d. processing | surface model generation | interpolation | DTM interpolation | |||
| 2.5 | Enhanced visualization | visualisation | visualisation | visualization | visualisation | d. visualization | visualization | visualizations | visualization | |
| quality and accuracy assessment | ||||||||||
| confidence of features | ||||||||||
| Archaeological interpretation | 3.1 | data integration | d. integration | |||||||
| 3.2 | interpretative mapping | mapping | manual detection | interpretative mapping | d. mapping 1 | archaeological interpretation 1 | interpretative mapping | |||
| 3.3 | groundassessment | field survey | ground inspection | ground validation 1 | ground-observation | |||||
| 3.4 | deep’ interpretation | additional uses (GIS) | ‘Deep’, integrated multi-scale interpretation | |||||||
| automated mapping | automatic detection | |||||||||
| Dissemination & Archiving | 4.1 | d. management | documentation | d. management | ||||||
| 4.2 | dissemination | dissemination | dissemination | |||||||
| 4.3 | archiving | archiving | archiving |
| Phase | Step | Workflow Step | Arch. Engagement | References | |
|---|---|---|---|---|---|
| 1 | Raw data acquisition & Processing | 1.1 | Project planning | + | [15,27,29] |
| 1.2 | System calibration | o | [15,16,29] | ||
| 1.3 | Data acquisition | o | [13,15,16,20,27,28,29] | ||
| 1.4 | Registering | + | [15,16,27,28,29] | ||
| 1.5 | Strip adjustment | o | [15,27,28,29] | ||
| 2 | Point cloud processing & Derivation of products | 2.1 | Automatic ground point classification | ++ | [13,15,16,20,27,29] |
| 2.2 | Object-type classification | ++ | [29] | ||
| 2.3 | Manual reclassification | +++ | [20,28] | ||
| 2.4 | DFM interpolation | + | [15,20,27,28,29] | ||
| 2.5 | Enhanced visualization | +++ | [13,15,16,20,21,27,28,29] | ||
| 3 | Archaeological interpretation | 3.1 | Data integration | ++ | [21] |
| 3.2 | Interpretative mapping | +++ | [13,16,20,21,27,29] | ||
| 3.3 | Ground assessment | +++ | [13,21,27,29] | ||
| 3.4 | ‘Deep’ interpretation | +++ | [13,27] | ||
| 3.5 | Automated mapping | ++ | [16] | ||
| 4 | Dissemination & Archiving | 4.1 | Data management | + | [16,28] |
| 4.2 | Dissemination | + | [27,28] | ||
| 4.3 | Archiving | + | [27,28] | ||
| Step | Importance | M/P | Type | Example | Category |
|---|---|---|---|---|---|
| 1.1 Project planning | ++ | M | Title | Lasersko skeniranje Slovenije | Data availability |
| + | M | Brief description | Countrywide scanning | Data potential | |
| + | P | Purpose | General purpose, flood protection management | Data potential | |
| + | M | Platform | Fixed wing aircraft | Data potential | |
| ++ | P | Date of flight(s) | between 14 March 2014 and 2 April 2015 | Data potential | |
| o | P | Operator | Flycom d.o.o. | Data availability, data potential | |
| ++ | M | Custodian | GURS | Data availability | |
| 1.2 System calibration | + | P | Scanner type | Full-waweform | Data potential |
| o | M | Instruments (laser scanner/INS/GNSS) | RIEGL LMS-Q780/IGI Aerocontrol Mark II.E 256 Hz/GNSS: Novatel OEMV-3 | Data potential | |
| o | M | Pulse repetition rate (PRR) [kHz] | N/A | Data potential | |
| + | M | Wavelength | N/A | Data potential | |
| + | M | Max. scanning angle | ±30° 1 | Data potential | |
| o | M | Scan lines per second | N/A | Data potential | |
| ++ | M | additional sensors | None | Data potential | |
| o | M | Max. scanning angle error | 0.25 mrad | Data potential | |
| o | M | INS angle accuracy | roll/pitch 0.004°; heading 0.01°; position 0.05 m | Data potential | |
| o | M | INS-GNSS-laser synchronisation error | 0.005 ms | Data potential | |
| (1.3) Data acquisition | o | M | Altitude above ground level (AGL) | 1200–1400 m | Data potential |
| o | M | Average speed | 165 kts/105 ms | Data potential | |
| o | M | Flight strip overlap | N/A (<5%) | Data potential | |
| o | M | Swath width | 865 m | Data potential | |
| ++ | M | Footprint diameter [m] | N/A | Data potential | |
| ++ | M | Average laser pulse density per m2 | 5 | Data potential | |
| ++ | M | N/E/H accuracy (precision) (m) | ±0.02/0.02/0.025 | Data potential | |
| ++ | M | Vegetation state | Dormant | Data potential | |
| o | M | No. of flight strips | 28 | Data availability | |
| (1.4) Registering | o | P | Flight trajectory calculation (software/method) | GrafNav (Waypoint-Novatel) v8.50/DGPS | Exploited data potential |
| o | P | GNSS and IMU merging (software) | AeroOffice (IGI) v5.1f | Exploited data potential | |
| o | P | Raw data analysis (software) | RiPROCESS v1.5.9: RiANALYZE v6.0.2 (RIEGL) | Exploited data potential | |
| o | P | Merging of raw data with flight trajectory | RiPROCESS v1.5.9: RiWORLD v4.5.8 (RIEGL) | Exploited data potential | |
| + | P | Full-Waveform Processing and Filtering | N/A | Exploited data potential | |
| o | P | LAS export (software) | RiPROCESS (RIEGL) v1.5.9 | Data potential available for point cloud processing | |
| ++ | M | LAS format | 1.2 | Data potential available for point cloud processing | |
| ++ | M | Coordinate system | D96/TM | Data potential available for point cloud processing | |
| (1.5) Strip adjustment | + | P | Strip adjustment (yes/no) | Yes | Exploited data potential |
| o | P | Strip adjustment (software/method) | TerraMatch (TerraScan)/line matching | Exploited data potential |
| Step | Importance | Type | Example |
|---|---|---|---|
| (2.1) Automatic ground point classification | ++ | Software | LAStools1 Rapidlasso GmbH |
| ++ | Filter | lasground_new | |
| ++ | Settings | st: 5; g: /; off: 0.05; s+: 1.0; s−: 1.0; b: no; terrain type: wilderness; pre-processing: ultra fine 2 | |
| (2.2) Object-type classification | + | Software | LAStools 1, Rapidlasso GmbH |
| + | Filter | lasheight | |
| + | Settings | classify between: 0.5 and 2 as 3; classify between: 2 and 5 as 4; classify above: 5 as 5 | |
| + | Software | LAStools 1, Rapidlasso GmbH | |
| + | Filter | lasclassify | |
| o | Settings | building planarity: 0.1; forest ruggedness: 0.4; ground offset: 1.8 | |
| (2.3) Manual reclassification | + | Targeted area | Within the known site of castle ruins |
| + | Targeted features | Standing archaeological features (type 3) | |
| + | Software | Global Mapper® 21.1.x, Bluemarblegeo | |
| ++ | Change-detection map | See Figure 2d | |
| (2.4) DFM interpolation | + | Software | Surfer 17.1.x, Goldensoftware® |
| + | Filter | Kriging | |
| + | Settings | Kriging type: point; Drift: none; No. sectors: 4; Max. all sectors: 64; Max. each sector: 16; Min. all sectors: 8; Radius 1: 20; Radius 2: 20; cell size: 0.25 m. | |
| (2.5) Enhanced visualization | ++ | Software | RVT 2.2.1, ZRC SAZU |
| ++ | Filter | Sky view factor | |
| o | Settings | No. search directions: 32; Search radius: 10; Remove noise: no. | |
| o | Software | RVT 2.2.1. ZRC SAZU | |
| o | Filter | Visualization for archaeological topography (VAT) | |
| o | Settings | setting: steep. | |
| o | Software | WhiteboxTools 1.4.0., University of Guelph’s GHRG | |
| o | Filter | DiffFromMeanElev | |
| o | Settings | x dimension: 10; y dimension: 10 |
| Name | Data Type | Example | Data Source | Category |
|---|---|---|---|---|
| ID | Sequential integer number | 10,001 | Automatic | M |
| Feature Type | Controlled vocabulary | Cairn | Operator | D |
| Feature Confidence | Integer number 0–3 | 3 | Operator | D |
| Chronology | Controlled vocabulary | Iron Age | Operator | D |
| Chronology Confidence | Integer number 0–3 | 2 | Operator | D |
| Interpretation | Free text | Cairn, a part of the Knežak hillfort cairnfield. | Operator | D |
| Source | Controlled vocabulary, multiple entries possible | SVF | Operator | P |
| Visibility | Integer number 1–2 | 2 | Operator | P |
| Low vegetation density | Integer number 1–3 | 2 | Automatic | D |
| Other | Free text | N/A | Operator | D |
| Author | Controlled vocabulary | E.L. | Automatic | M |
| Date | Date | 10 September 2016 | Automatic | M |
| Geometric properties | Area (m2), length (m) | 13.1 m2 | Automatic | D |
| Coordinates | XYZ coordinates | 440,929.17, 53,033.93, 674.75 | Automatic | D |
| Name | Data Type | Example | Data Source | Category |
|---|---|---|---|---|
| ID | Sequential integer number | 10,001 | Automatic | M |
| Feature Type | Controlled vocabulary | Cairn | Operator | D |
| Feature Confidence | Integer number 0–3 | 3 | Operator | D |
| Chronology | Controlled vocabulary | Iron Age | Operator | D |
| Chronology Confidence | Integer number 0–3 | 2 | Operator | D |
| Interpretation | Free text | Cairn, a part of the Knežak hillfort cairnfield. | Operator | D |
| Visibility (field) | Integer number 1–3 | 2 | Operator | P |
| Vegetation | Controlled vocabulary | Mature deciduous forest | Operator | D |
| Field notes | Free text | Cairn is overgrown with grass that is lower than in its surroundings, which indicates stony interior. | Operator | D |
| Photographic documentation | Photography | Operator | D | |
| Author | Controlled vocabulary | B.Š. | Automatic | M |
| Date | Date | 15 January 2017 | Automatic | M |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lozić, E.; Štular, B. Documentation of Archaeology-Specific Workflow for Airborne LiDAR Data Processing. Geosciences 2021, 11, 26. https://doi.org/10.3390/geosciences11010026
Lozić E, Štular B. Documentation of Archaeology-Specific Workflow for Airborne LiDAR Data Processing. Geosciences. 2021; 11(1):26. https://doi.org/10.3390/geosciences11010026
Chicago/Turabian StyleLozić, Edisa, and Benjamin Štular. 2021. "Documentation of Archaeology-Specific Workflow for Airborne LiDAR Data Processing" Geosciences 11, no. 1: 26. https://doi.org/10.3390/geosciences11010026
APA StyleLozić, E., & Štular, B. (2021). Documentation of Archaeology-Specific Workflow for Airborne LiDAR Data Processing. Geosciences, 11(1), 26. https://doi.org/10.3390/geosciences11010026