A Review of Russian Snow Avalanche Models—From Analytical Solutions to Novel 3D Models


Abstract
1. Introduction
2. Dense Avalanches Hydraulic Models
2.1. The MSU-1D Model
2.2. Further Development of the MSU-1D Model
2.2.1. Two-Dimensional Motion
2.2.2. Channeled Avalanches
2.2.3. Influence of the Slope Surface Curvature
2.2.4. Entrainment
2.2.5. Friction
2.3. Flow Stability Conditions
2.4. Comments to a History of Dense Avalanche Hydraulic Models
3. Analytical Solutions
3.1. Large-Scale and Small-Scale Motions
3.2. Analytical Solution for a 1D Flow at a Long Wide Homogeneous Slope
3.2.1. Solution for the Large-Scale Zone 2
3.2.2. About Solution for Zone 1 (Adjacent to the Leading Edge)
- It is stationary in the coordinate system moving at a speed w: the flow cannot change significantly over a period of time that is small from a large-scale point of view.
- The velocity and thickness at the avalanche leading edge satisfy the relationships (4).
3.3. 1D Motion without Entrainment
3.4. Solution under the Instability of Smooth Flows
3.5. Concluding Remarks to Analytical Solutions for MSU-1 Model
3.6. Other Analytical Solutions
3.6.1. 1D Laminar Flow of Generalized Power-Law Fluid
3.6.2. 2D Motion on Slopes with Smoothly Varying Properties
3.6.3. About the Other Analytical Solutions
4. Powder Snow Avalanches and Mixed Avalanches
4.1. Powder-Snow Cloud
4.2. Hydraulic Models for Powder and Mixed Avalanches
The Analogy of Powder Avalanches and Turbidity Currents
4.3. Powder Avalanche Models with Resolution in Normal to Bed Direction
5. Calculations
6. Models Based on Full Equations of Continuum Mechanics Problems
6.1. Weak Points of Hydraulic Models
6.2. Problems Arising at Construction of 3D Models for Dense Avalanches
- Formulation of more or less reasonable hypotheses that are in qualitative agreement with the measurement data.
- Incorporation of the accepted hypotheses into a mathematical and numerical model.
- Investigation of the influence of accepted hypotheses on the flow behavior by solving various simple, specific problems.
- Comparison of the results with the data of measurements to support or reject the accepted hypotheses.
6.3. Basic Hypotheses
6.3.1. Rheological Relationships for the Moving Snow
6.3.2. The Entrainment Hypothesis
6.3.3. Turbulence Models
7. Unsteady Uniform Flow down a Slope with Constant Inclination
7.1. Mathematical Statement of the Problem
- Zero friction at the upper free surface:
- No-slip condition at the bottom:Note that a question whether the no-slip condition is suitable for various natural slope flows has no definite answer yet (see a discussion in [103]).
- An additional condition at the bottom, which is fulfilled for the entraining flow:
7.2. Laminar Flows Entraining the Underlying Snow
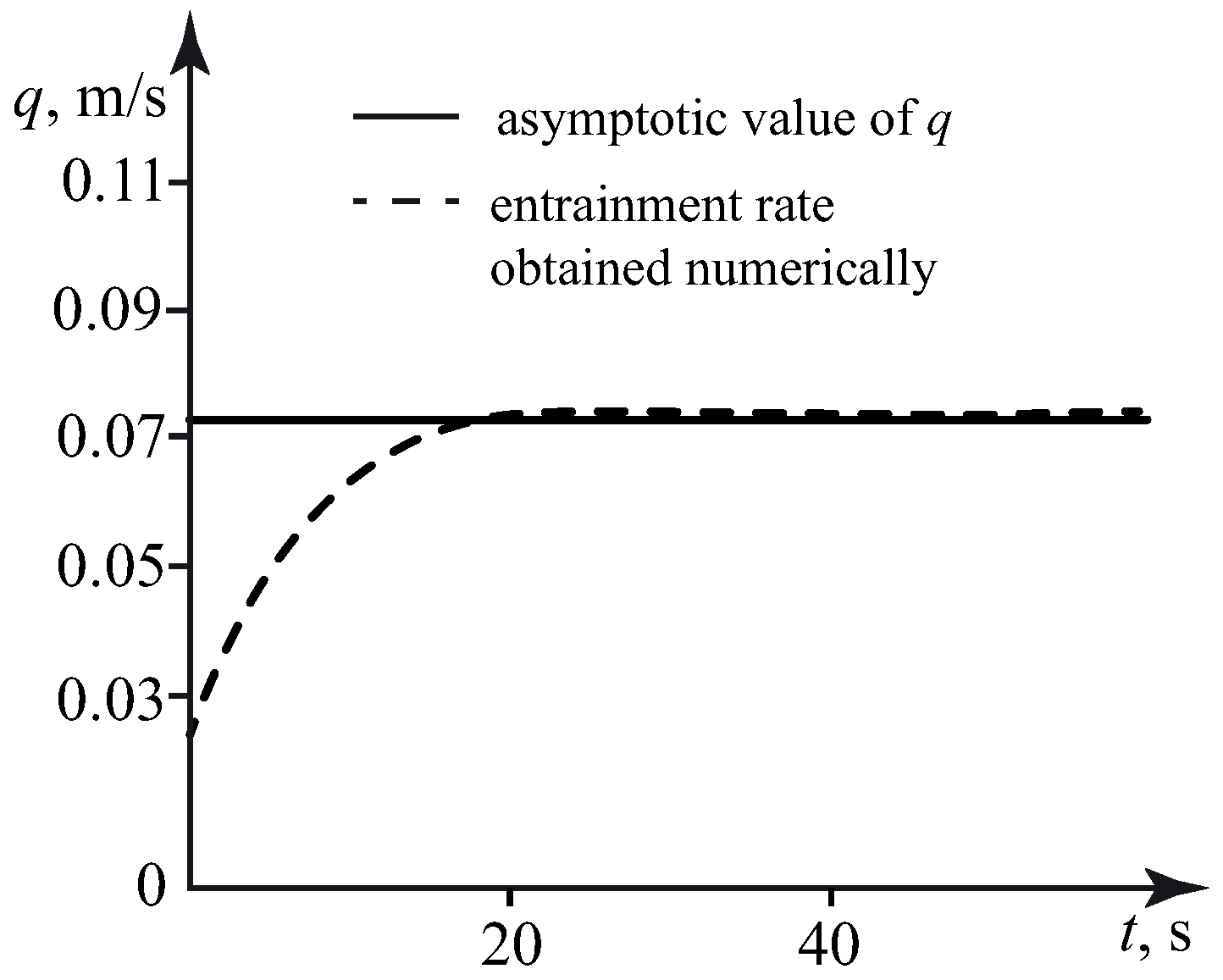
7.3. Asymptotic Analytical Solution for the Entrainment Rate
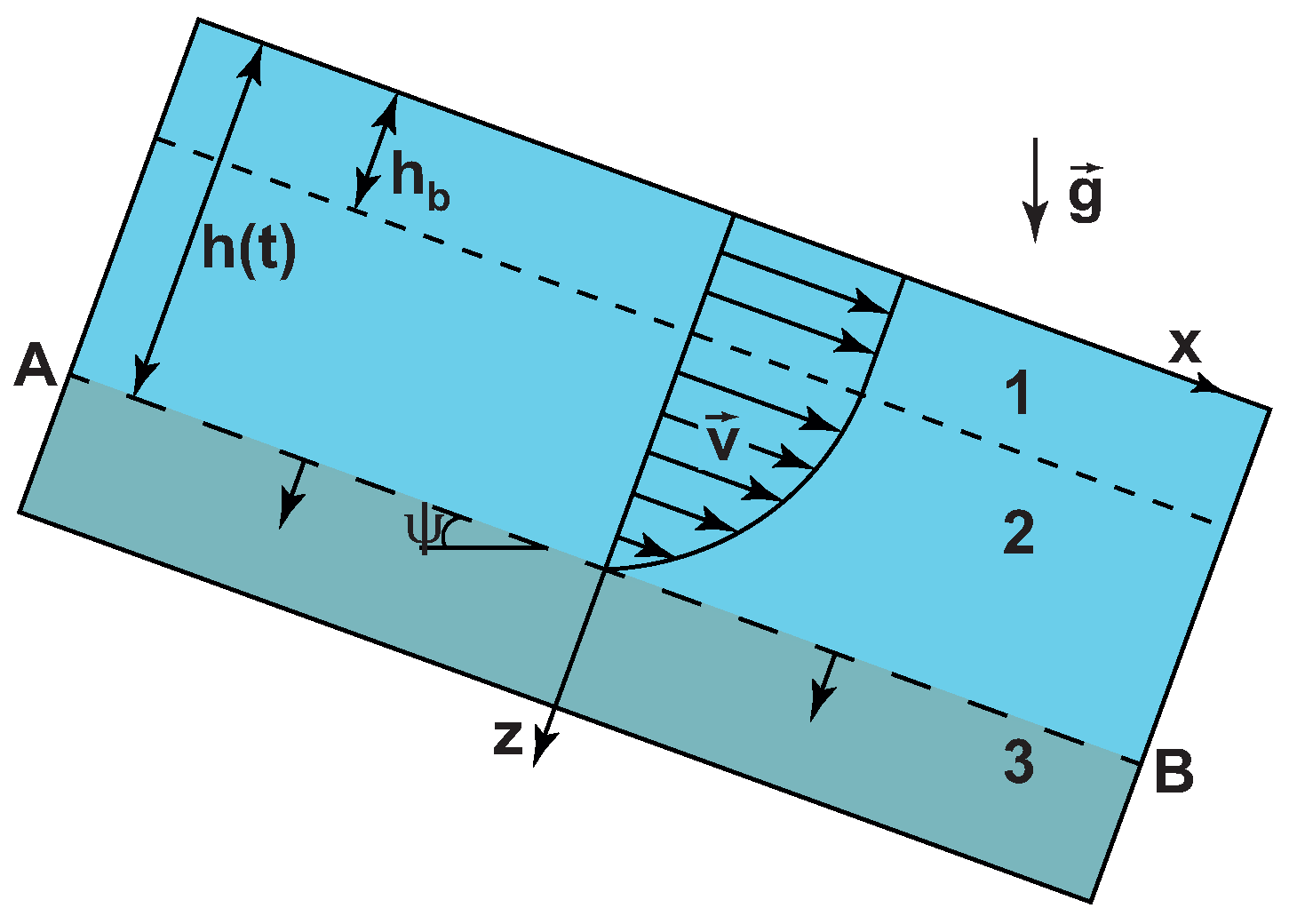
- Due to entrainment, the lower boundary of this layer (the bottom) moves down at a constant speed: .
- The flow is stationary in the coordinate system , , which moves with the bottom.
- for the Herschel–Bulkley fluid
- for the Cross fluid
7.4. Turbulent Motion of Avalanches. Results of Numerical Investigation
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| MSU-1D model | Moscow State University one-dimensional model |
| KS-model | Kulikovskii-Sveshnikova model for a powder cloud |
| LPY turbulence model | Lushchik-Paveliev-Yakubenko turbulence model |
References
- LaChapelle, E. Snow avalanches: A review of current research and applications. J. Glaciol. 1977, 19, 313–324. [Google Scholar] [CrossRef]
- Hopfinger, E.J. Snow avalanche motion and related phenomena. Annu. Rev. Fluid Mech. 1983, 15, 47–76. [Google Scholar] [CrossRef]
- Harbitz, C. A Survey of Computational Models for Snow Avalanche Motion; NGI Report 581220–1 SAME Collaboration 32; Norwegian Geotechnical Institute (NGI): Oslo, Norway, 1998. [Google Scholar]
- Bartelt, P.; Salm, B.; Gruber, U. Calculating dense-snow avalanche runout using a Voellmy-fluid model with active/passive longitudinal straining. J. Glaciol. 1999, 45, 242–254. [Google Scholar] [CrossRef]
- Barbolini, M.; Gruber, U.; Keylock, C.; Naaim, M.; Savi, F. Application of statistical and hydraulic-continuum dense-snow avalanche models to five real European sites. Cold Reg. Sci. Technol. 2000, 31, 133–149. [Google Scholar] [CrossRef]
- Naaim, M.; Naaim-Bouvet, F.; Faug, T.; Bouchet, A. Dense snow avalanche modeling: Flow, erosion, deposition and obstacle effects. Cold Reg. Sci. Technol. 2004, 39, 193–204. [Google Scholar] [CrossRef]
- Salm, B. A short and personal history of snow avalanche dynamics. Cold Reg. Sci. Technol. 2004, 39, 83–92. [Google Scholar] [CrossRef]
- Issler, D.; Harbitz, C.; Kristensen, K.; Lied, K.; Moe, A.; Barbolini, M.; De Blasio, F.; Khazaradze, G.; McElwaine, J.; Mears, A.L.; et al. A comparison of avalanche models with data from dry-snow avalanches at Ryggfonn, Norway. In Proceedings of the 11th International Conference and Field Trip on Landslides, Trondheim, Norway, 1–10 September 2005; pp. 173–179. [Google Scholar]
- Pudasaini, S.; Hutter, C. Avalanche Dynamics: Dynamics of Rapid Flows of Dense Granular Avalanches; Springer: Berlin/Heidelberg, Germany, 2007; p. 602. [Google Scholar] [CrossRef]
- Ancey, C. Snow Avalanches. In Geomorphological Fluid Mechanics: Selected Topics in Geological and Geomorphological Fluid Mechanics; Springer: Berlin/Heidelberg, Germany, 2008; Volume 582, pp. 319–338. [Google Scholar] [CrossRef]
- Dutykh, D.; Acary-Robert, C.; Bresch, D. Mathematical modeling of powder-snow avalanche flows. Stud. Appl. Math. 2011, 127, 38–66. [Google Scholar] [CrossRef]
- Fischer, J.T. A novel approach to evaluate and compare computational snow avalanche simulation. Nat. Hazards Earth Syst. Sci. 2013, 13, 1655–1667. [Google Scholar] [CrossRef]
- Rauter, M.; Kofler, A.; Huber, A.; Fellin, W. faSavageHutterFOAM 1.0: Depth-integrated simulation of dense snow avalanches on natural terrain with OpenFOAM. Geosci. Model Dev. 2018, 11, 2923–2939. [Google Scholar] [CrossRef]
- Myagkov, S.; Kanaev, L. Geografiya Lavin (Geography of Avalanches); MSU Publishing: Torun, Poland, 1992. (In Russian) [Google Scholar]
- Bozhinskiy, A.; Losev, K. The Fundamentals of Avalanche Science; Federal Institute for Snow and Avalanche Research (EISLF): Davos, Switzerland, 1998. [Google Scholar]
- Goff, A.; Otten, G. Experimentalnoe opredelenie sily udara snezhnih obvalov (Experimental determination of avalanche impact force). Proc. GSSR Acad. Sci. 1939, 3. (In Russian) [Google Scholar]
- Saatchyan, G. Snow and snow avalanches. Trudy TNIIS 1936, 27, 1–59. (In Russian) [Google Scholar]
- Kozik, S. Raschet dvizheniya snezhnih lavin (Calculation of snow avalanches movement); Gidrometeoizdat: Leningrad, Russia, 1962; p. 70. (In Russian) [Google Scholar]
- Blagovechshensky, V.; Eglit, M.; Zhdanov, V.; Askarbekov, B. Calibration of snow avalanche mathematical models using the data of real avalanches in the Ile (Zailiyskiy) Alatau Range. Ice Snow 2017, 57, 213–220. [Google Scholar] [CrossRef]
- Voellmy, A. Über die Zerstörungskraft von Lawinen. III. Zur Dynamik der Lawinen. Schweiz. Bauzeitg. 1955, 73, 212–217. [Google Scholar]
- Grigorian, S.; Eglit, M.; Yakimov, Y. A new formulation and solution of the problem of the motion of a snow avalanche. Trudy Vycokogornogo Geofizicheskogo Inst. 1967, 12, 104–113. (In Russian) [Google Scholar]
- Briukhanov, A.; Grigorian, S.; Miagkov, S.; Plam, M.; Shurova, I.; Eglit, M.; Yakimov, Y. On some new approaches to the dynamics of snow avalanches. In Proceedings of the International Conference on Low Temperature Science. I. Conference on Physics of Snow and Ice, II. Conference on Cryobiology, Sapporo, Japan, 14–19 August 1966; Volume 1, pp. 1223–1241. [Google Scholar]
- Eglit, M. Theoretical approaches to the calculation of the motion of snow avalanches. In Itogi Nauki; VINITI: Moscow, Russia, 1968; pp. 60–97, English translation in Glaciological Data Report GD-16; National Snow and Ice Data Center Publications: Boulder, CO, USA, 1984; pp. 63–118. [Google Scholar]
- Bakhvalov, N.; Eglit, M. Study of the solutions of equations of motion of snow avalanches. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1970, 16, 7–14, English transl. in Glaciological Data Report GD-16; National Snow and Ice Data Center Publications: Boulder, CO, USA, 1984; pp, 117–128. [Google Scholar]
- Bakhvalov, N.S.; Églit, M.É. Investigation of the one-dimensional motion of a snow avalanche along a flat slope. Fluid Dyn. 1973, 8, 683–689. [Google Scholar] [CrossRef]
- Eglit, M. Calculation of the parameters of avalanches in the runout zone. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1982, 53, 35–39, (In Russian with English Summary). [Google Scholar]
- Kulikovskii, A.; Eglit, M. Two-dimensional problem of the motion of a snow avalanche along a slope with smoothly changing properties. J. Appl. Math. Mech. 1973, 37, 792–803. [Google Scholar] [CrossRef]
- Mironova, E. Chislenniy raschet lavinnih potokov na osnove dvumernoi gidravlicheskoi shemy (Numerical simulation of avalanche flows by two-dimensional hydraulic scheme). Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1985, 53, 113–115, (In Russian with English Summary). [Google Scholar]
- Eglit, M. Unsteady Motions in Channels and on Slopes; MSU: Moscow, Russia, 1986. (In Russian) [Google Scholar]
- Mironova, E. Mathematical Modelling of the Motion of Water Flows, Snow Avalanches, and Floods. Ph.D. Thesis, Lomonosov Moscow State University, Moscow, Russia, 1987. (In Russian). [Google Scholar]
- Volodicheva, N.; Mironova, E.; Oleinikov, A.; Eglit, M. The use of mathematical modelling to determine the boundaries of propagation of avalanches. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1986, 56, 78–81, (In Russian with English Summary). [Google Scholar]
- Volodicheva, N.; Zolotariov, E.; Efremov, I.; Mironova, E.; Oleinikov, A. Application of numerical modeling to the description of snow avalanche motion. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1990, 69, 19–24, (In Russian with English Summary). [Google Scholar]
- Ostroumov, A. A Model of the Motion of Snow Avalanches of Chute Type. Ph.D. Thesis, Lomonosov Moscow State University, Moscow, Russia, 1972. (In Russian). [Google Scholar]
- Danilova, E.; Eglit, M. The motion of chute avalanches. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1977, 31, 65–74, (In Russian with English Summary). [Google Scholar]
- Danilova, E.; Eglit, M. The motion of snow avalanches under conditions of limiting friction. Izv. Akad. Nauk SSSR Mekh. Zhidk. Gaza 1977, 5, 30–37, English transl. in Fluid Dyn. 1977, 12, 666–672. [Google Scholar]
- Danilova, E. Movement of an avalanche in a channel with rectangular cross-section. Mosc. Univ. Mech. Bull. 1978, 4, 110–116. [Google Scholar]
- Blagovechshenskii, V.; Eglit, M. The use of mathematical models for mapping avalanche hazard. In Proceedings of the International Conference “New Approaches and Methods in The Study of Natural and Environmental Systems”, Almaty, Kazakhstan, 12–13 October 2000; pp. 153–157. (In Russian). [Google Scholar]
- Blagovechshenskiy, V.; Eglit, M.; Naaim, M. The calibration of an avalanche mathematical model using field data. Nat. Hazards Earth Syst. Sci. 2002, 2. [Google Scholar] [CrossRef]
- Blagovechshenskiy, V.; Eglit, M.; Naaim, M. Estimation of avalanche friction coefficients at Zailiyskiy Alatau range (Kazakhstan). Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 2002, 93, 122–125. (In Russian) [Google Scholar]
- Grigorian, S.; Ostroumov, A. Calculation of the Parameters of the Motion and the Force Action on an Avalanche Dike “Tubri” (Nizhnyaya Svanetiya); Report No. 1695; Inst. Mekh. Moskov. Gos. Univ.: Moscow, Russia, 1975. (In Russian) [Google Scholar]
- Eglit, M. Some Mathematical Models of Snow Avalanches, Advances in the Mechanics and the Flow of Granular Materials; Tech Publ.: Clausthal-Zellerfeld, Germany; Gulf Publ. Co.: Houston, TX, USA, 1983; Volume 2, pp. 577–588. [Google Scholar]
- Eglit, M.E. Effect of the slope curvature on an avalanche dynamics. In Proceedings of the European Geosciences Union General Assembly 2011, Vienna, Austria, 3–8 April 2011. [Google Scholar]
- Grigorian, S.S.; Ostroumov, A.V. Matematicheskaya Model Sklonovih Processov Lavinnogo Tipa (The Mathematical Model for Slope Processes of Avalanche Type); Scientific Report No. 1955; Institute of Mechanics, Moscow State University: Moscow, Russia, 1977. (In Russian) [Google Scholar]
- Eglit, M.; Demidov, K. Mathematical modeling of snow entrainment in avalanche motion. Cold Reg. Sci. Technol. 2005, 43, 10–23. [Google Scholar] [CrossRef]
- Eglit, M.; Vel’tishchev, N. Investigation of mathematical models of powder-snow avalanche. Materiali Glatsiologicheskih Issled. (Data Glaciol. Stud.) 1985, 53, 116–120. (In Russian) [Google Scholar]
- Nazarov, A. Mathematical modeling of a snow-powder avalanche in the framework of the equations of two-layer shallow water. Fluid Dyn. 1991, 26, 70–75. [Google Scholar] [CrossRef]
- Nazarov, A. Opit primenenija dvuhsloinoi modeli dlja rascheta dvizhenija pilevih lavin (Use of two-layer model for calculating of motion of powder snow avalanches). Materiali Glatsiologicheskih Issled. (Data Glaciol. Stud.) 1992, 73, 73–79, (In Russian with English Summary). [Google Scholar]
- Nazarov, A. Matematicheskoe Modelirovanie Nestacionarnogo Dvizhenija Snezhno-Pilevyh Lavin (Mathematical Modelling of Non-Stationary Motion of Powder-Snow Avalanches). Ph.D. Thesis, Lomonosov Moscow State University, Moscow, Russia, 1993. (In Russian). [Google Scholar]
- Eglit, M.E. Mathematical and physical modeling of powder snow avalanches in Russia. Ann. Glaciol. 1998, 26, 281–284. [Google Scholar] [CrossRef]
- Sovilla, B.; Burlando, P.; Bartelt, P. Field experiments and numerical modeling of mass entrainment in snow avalanches. J. Geophys. Res. Earth Surf. 2006, 111. [Google Scholar] [CrossRef]
- Issler, D. Dynamically consistent entrainment laws for depth-averaged avalanche models. J. Fluid Mech. 2014, 759, 701–738. [Google Scholar] [CrossRef]
- Grigorian, S.S.; Ostroumov, A.V. On a Continuum Model for Avalanche Flow and Its Simplified Variants. Geosciences 2020, 10, 35. [Google Scholar] [CrossRef]
- Kulikovskii, A.; Sveshnikova, E. A model for simulation of a powder snow avalanche. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1977, 53, 108–112, (In Russian with English Summary). [Google Scholar]
- Landau, L.; Lifshitz, E. Fluid Mechanics. Volume 6 of Course of Theoretical Physics; Pergamon Press: New York, NY, USA, 1987. [Google Scholar]
- Grigorian, S. A new law of friction and mechanism for large—Scale slag heaps and landslides. Dokl. Akad. Nauk SSSR 1979, 244, 846–849, English transl. in Soviet Phys. Dokl. 1979, 24, 110–111. [Google Scholar]
- Christen, M.; Kowalski, J.; Bartelt, P. RAMMS: Numerical simulation of dense snow avalanches in three-dimensional terrain. Cold Reg. Sci. Technol. 2010, 63, 1–14. [Google Scholar] [CrossRef]
- Eglit, M. The dynamics of snow avalanches. Proc. Steklov Inst. Math. 1991, 186, 187–193. [Google Scholar]
- Whitham, G. Linear and Nonlinear Waves; Wiley: New York, NY, USA, 1974. [Google Scholar]
- Zayko, J.; Eglit, M. Stability of downslope flows to two-dimensional perturbations. Phys. Fluids 2019, 31, 086601. [Google Scholar] [CrossRef]
- Bakhvalov, N.; Kulikovskii, A.; Kurkin, V.; Sveshnikova, E.; Eglit, M. On movement of snow avalanches. Trudy SARNIGMI 1974, 15, 3–15. [Google Scholar]
- Eglit, M.; Yakubenko, A.; Drozdova, Y. Flow of power-law fluid down incline plane. Analytical solution. In Proceedings of the XIX International Conference Modern Problems in Continuum Mechanics, Rostov-na-Donu, Russia, 15–18 October 2018; pp. 221–225. [Google Scholar]
- Efremov, I.; Volodicheva, N.A.; Zolotariov, E.A.; Mironova, E.M.; Oleinikov, A.D. The use of numerical modeling to describe the movement of snow avalanches. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1990, 69, 19–24. (In Russian) [Google Scholar]
- Mironova, E.; Eglit, M. Software package for numerical simulation of snow avalanches, debris flows and water flows. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1988, 63, 161–165, (In Russian with English Summary). [Google Scholar]
- Perla, R.; Cheng, T.; McClung, D. A two-parameter model of snow avalanche motion. J. Glaciol. 1980, 26, 197–207. [Google Scholar] [CrossRef]
- Salm, B. Flow, flow transition and runout distances of flowing avalanches. Ann. Glaciol. 1993, 18, 221–226. [Google Scholar] [CrossRef]
- Norem, H.; Irgens, F.; Schieldrop, B. Simulation of snow-avalanche flow in run-out zones. Ann. Glaciol. 1989, 13, 218–225. [Google Scholar] [CrossRef][Green Version]
- Savage, S.; Hutter, K. The motion of a finite mass of granular material down a rough incline. J. Fluid Mech. 1989, 199, 177–215. [Google Scholar] [CrossRef]
- Hutter, K.; Siegel, M.; Savage, S.; Nohguchi, Y. Two-dimensional spreading of a granular avalanche down an inclined plane. Part I. theory. Acta Mech. 1993, 100, 37–68. [Google Scholar] [CrossRef]
- Wieland, M.; Gray, J.M.N.T.; Hutter, K. Channelized free surface flow of cohesionless granular avalanche in a chute with shallow lateral curvature. J. Fluid Mech. 1999, 392, 73–100. [Google Scholar] [CrossRef]
- Bartelt, P.; Kern, M.; Christen, M. A mixed flowing/powder snow avalanche model. In Proceedings of the International Snow Science Workshop: A Merging Between Theory and Practice (ISSW 2000), Big Sky, MT, USA, 1–6 October 2000; Volume 1, pp. 280–289. [Google Scholar]
- Lighlhill, I.J.; Whitham, G.A. On kinematic waves. Proc. R. Soc. Lond. A 1955, 229, 281–316. [Google Scholar]
- Lax, P.D. Hyperbolic systems of conservation Laws II. Commun. Pure Appl. Math. 1957, 10, 537–566. [Google Scholar] [CrossRef]
- Eglit, M. Mathematical and physical modeling powder snow avalanches. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1998, 84, 76–79. (In Russian) [Google Scholar]
- Eglit, M.; Sveshnikova, E. Mathematical modelling of snow avalanche. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1980, 38, 79–84. (In Russian) [Google Scholar]
- Eglit, M.E.; Revol, P. Models for Powder Snow Avalanches: Comparison of Two Approaches. Publ.-Nor. Geotech. Inst. 1998, 203, 99–103. [Google Scholar]
- Onufriev, A. Theory of motion of circular vortex under gravity. Motion of an atomic explosion cloud. J. Appl. Mech. Tech. Phys. 1967, 2, 3–15. [Google Scholar]
- Beghin, P.; Hopfinger, E.; Britter, R. Gravitational convection from instantaneous sources on inclined boundaries. J. Fluid Mech. 1981, 107, 407–422. [Google Scholar] [CrossRef]
- Beghin, P.; Brugnot, G. Contribution of theoretical and experimental results to powder snow avalanche dynamics. CREEL Rev. 1983, 8, 67–73. [Google Scholar] [CrossRef]
- Ancey, C. Powder snow avalanches: Approximation as non-Boussinesq clouds with a Richardson number—Dependent entrainment function. J. Geophys. Res. 2004, 109, F01005. [Google Scholar] [CrossRef]
- Eglit, M.; Pikulina, N.; Yakubenko, A. 3D cloud on a slope: A mathematical model. Data Glaciol. Stud. 2003, 94, 47–51. (In English) [Google Scholar]
- Beghin, P.; Olagne, X. Experimental and theoretical study of the dynamics of powder snow avalanches. Cold Reg. Sci. Technol. 1991, 19, 317–326. [Google Scholar] [CrossRef]
- Kneller, B.; Buckee, C. The structure and fluid mechanics of turbidity currents: A review of some recent studies and their geological implications. Sedimentology 2000, 47, 62–94. [Google Scholar] [CrossRef]
- Parker, G.; Fukushima, Y.; Pantin, H.M. Self-accelerating turbidity currents. J. Fluid Mech. 1986, 171, 145–181. [Google Scholar] [CrossRef]
- Eglit, M. Mathematical model of a high concentration turbidity currents. In Baltic-Scandinavian Symposium on Ecological Fluid Dynamics; Report No. 64; Royal Institute of Technology: Stockholm, Sweden, 1993; pp. 1–9. [Google Scholar]
- Liapidevskii, V.; Dutykh, D.; Gisclon, M. On the modelling of shallow turbidity flows. Adv. Water Resour. 2018, 113, 310–327. [Google Scholar] [CrossRef]
- Liapidevskii, V.; Dutykh, D. On velocity of turbidity currents over moderate slopes. Fluid Dyn. Res. 2019, 51, 1–39. [Google Scholar] [CrossRef]
- Scheiwiller, T. Dynamics of Powder-Snow Avalanches; 81 Mitteilungen der Versuchsanstalt fur Wasserbau, Hydrologie und Glaziologie; ETH Zurich: Zurich, Switzerland, 1986; p. 115. [Google Scholar]
- Brandstatter, W.; Hagen, F.; Sampl, P.; Schaffhauser, H. Dreidimensionalle Simulation von Staublawinen unter Berucksichtigung realer Gelandeformen. Zeitschrift der Wildbach- und Lawinebnverbauung Osterreichs 1992, 120, 107–137. [Google Scholar]
- Sampl, P. Current status of the AVL Avalanche Simulation Model—Numerical simulation of dry snow avalanches. In Proceedings of the “Pierre Beghin” International Workshop On Rapid Gravitational Mass Movements, Grenoble, France, 6–10 December 1993; Volume 1, pp. 269–296. [Google Scholar]
- Issler, D. Modelling of snow entrainment and deposition in powder-snow avalanches. Ann. Glaciol. 1998, 26, 253–258. [Google Scholar] [CrossRef]
- Blagovechshenskiy, V.; Eglit, M. Mathematical modelling of the effect of the parameters of avalanche sources and physical properties of the snow on the dynamics of avalanches. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1985, 53, 108–112, (In Russian with English Summary). [Google Scholar]
- Blagovechshenskiy, V.; Mironova, E.; Eglit, M. Calculation of avalanche parameters in little-studied mountain areas. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1995, 79, 36–40, (In Russian with English Summary). [Google Scholar]
- Bozhinskiy, A. Modelling of snow avalanche dynamics: Influence of model parameters. Ann. Glaciol. 2008, 49, 38–42. [Google Scholar] [CrossRef]
- Bryukhanov, A. Mekhanizm dvizheniya snezhnykh lavin i yego izucheniye v razlichnykh geograficheskikh usloviyakh metodom spetsial’noy skorostnoy stereos’yemki (The mechanism of movement of snow avalanches and its study in various geographical conditions by the method of special high-speed stereo shooting). Snow Avalanches Khibiny 1967, 1–9. (In Russian) [Google Scholar]
- Samoilov, V. Stereophotogrammetry of moving avalanches in Khibiny. Mater. Glyatsiologicheskikh Issled. (Data Glaciol. Stud.) 1976, 28, 128–133, (In Russian with English Summary). [Google Scholar]
- Zolotarev, E. Largescale Mapping of Avalanches and Avalanche Hazard; VINITY: Moscow, Russia, 1981; pp. 1481–5485. [Google Scholar]
- Grigorian, S.; Urumbaev, N. On the nature of avalanche air wave. Inst. Mekh. Moskov. Gos. Univ. 1975, 42, 74–82. [Google Scholar]
- Blagovechshenskiy, V. Determination of Avalanche Loads; Gylym: Almaty, Kazakhstan, 1991. (In Russian) [Google Scholar]
- Eglit, M.; Kulibaba, V.; Naaim, M. Impact of a snow avalanche against an obstacle. Formation of shock waves. Cold Reg. Sci. Technol. 2007, 50, 86–96. [Google Scholar] [CrossRef]
- Kulibaba, V.; Eglit, M. Numerical modeling of an avalanche impact against an obstacle with account of snow compressibility. Ann. Glaciol. 2008, 49, 27–32. [Google Scholar] [CrossRef]
- Bovet, E.; Chiaia, B.; Preziosi, L. A new model for snow avalanche dynamics based on non-Newtonian fluids. Meccanica 2010, 45, 753–765. [Google Scholar] [CrossRef]
- Issler, D.; Pastor Pérez, M. Interplay of entrainment and rheology in snow avalanches: A numerical study. Ann. Glaciol. 2011, 52, 143–147. [Google Scholar] [CrossRef]
- Eglit, M.; Yakubenko, A. Numerical modeling of slope flows entraining bottom material. Cold Reg. Sci. Technol. 2014, 108, 139–148. [Google Scholar] [CrossRef]
- Eglit, M.E.; Yakubenko, A.E. Effect of the bottom material capture and the non-Newtonian rheology on the dynamics of turbulent downslope flows. Fluid Dyn. 2016, 51, 299–310. [Google Scholar] [CrossRef]
- Zaiko, Y.S. Numerical modeling of downslope flows of different rheology. Fluid Dyn. 2016, 51, 443–450. [Google Scholar] [CrossRef]
- Eglit, M.E.; Yakubenko, A.E.; Zayko, J.S. Mathematical Modeling of Slope Flows of Non-Newtonian Media. Proc. Steklov Inst. Math. 2018, 300, 219–229. [Google Scholar] [CrossRef]
- Romanova, D. 3D avalanche flow modeling using OpenFOAM. Proc. Inst. Syst. Program. 2017, 29, 85–100. [Google Scholar] [CrossRef][Green Version]
- Dent, J.; Lang, T. Modeling of snow flow. J. Glaciol. 1980, 26, 131–140. [Google Scholar] [CrossRef][Green Version]
- Kern, M.; Tiefenbacher, F.; McElwain, J. The rheology of snow in large chute flows. Cold Reg. Sci. Technol. 2004, 39, 181–192. [Google Scholar] [CrossRef]
- Coussot, P.; Piau, J. A large-scale field coaxial cylinder rheometer for the study of the rheology of natural coarse suspensions. J. Rheol. 1995, 39, 105–124. [Google Scholar] [CrossRef]
- Coussot, P. Mudflow Rheology and Dynamics; A. A. Balkema: Rotterdam, The Netherlands, 1997; p. 272. [Google Scholar]
- Chhabra, R.P.; Richardson, J.F. Non-Newtonian Flow and Applied Rheology: Engineering Applications; Elsevier: Amsterdam, The Netherlands, 2008; p. 536. [Google Scholar]
- Balmforth, N.J.; Burbidge, A.S.; Craster, R.V.; Salzig, J.; Shen, A. Visco-plastic models of isothermal lava domes. J. Fluid Mech. 2000, 403, 37–65. [Google Scholar] [CrossRef]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar] [CrossRef]
- Lushchik, V.; Paveliev, A.; Yakubenko, A. Three-parameter model of shear turbulence. Fluid Dyn. 1978, 13, 350–362. [Google Scholar] [CrossRef]
- Rougier, J.; Kern, M. Predicting snow velocity in large chute flows under different environmental conditions. J. R. Stat. Soc. Ser. C (Appl. Stat.) 2010, 59, 737–760. [Google Scholar] [CrossRef][Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| , kg/m3 | , Pa | K, Pa·s | n | Comment |
|---|---|---|---|---|
| 200 | 0 | 1 | dense dry snow avalanche [108] | |
| 2 | dense snow [109] | |||
| 2000 | 400 | 100 | water-debris flow mixture of the concentration [110,111] | |
| 1300 | 10 | mineral particles suspension of the concentration [112] | ||
| 2600 | 1 | silicic lava [113] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eglit, M.; Yakubenko, A.; Zayko, J. A Review of Russian Snow Avalanche Models—From Analytical Solutions to Novel 3D Models. Geosciences 2020, 10, 77. https://doi.org/10.3390/geosciences10020077
Eglit M, Yakubenko A, Zayko J. A Review of Russian Snow Avalanche Models—From Analytical Solutions to Novel 3D Models. Geosciences. 2020; 10(2):77. https://doi.org/10.3390/geosciences10020077
Chicago/Turabian StyleEglit, Margarita, Alexander Yakubenko, and Julia Zayko. 2020. "A Review of Russian Snow Avalanche Models—From Analytical Solutions to Novel 3D Models" Geosciences 10, no. 2: 77. https://doi.org/10.3390/geosciences10020077
APA StyleEglit, M., Yakubenko, A., & Zayko, J. (2020). A Review of Russian Snow Avalanche Models—From Analytical Solutions to Novel 3D Models. Geosciences, 10(2), 77. https://doi.org/10.3390/geosciences10020077