
Grumpy Dogs Are Smart Learners—The Association between Dog–Owner Relationship and Dogs’ Performance in a Social Learning Task



Abstract
Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Ethical Statement
2.2. Subjects
2.3. The Questionnaire
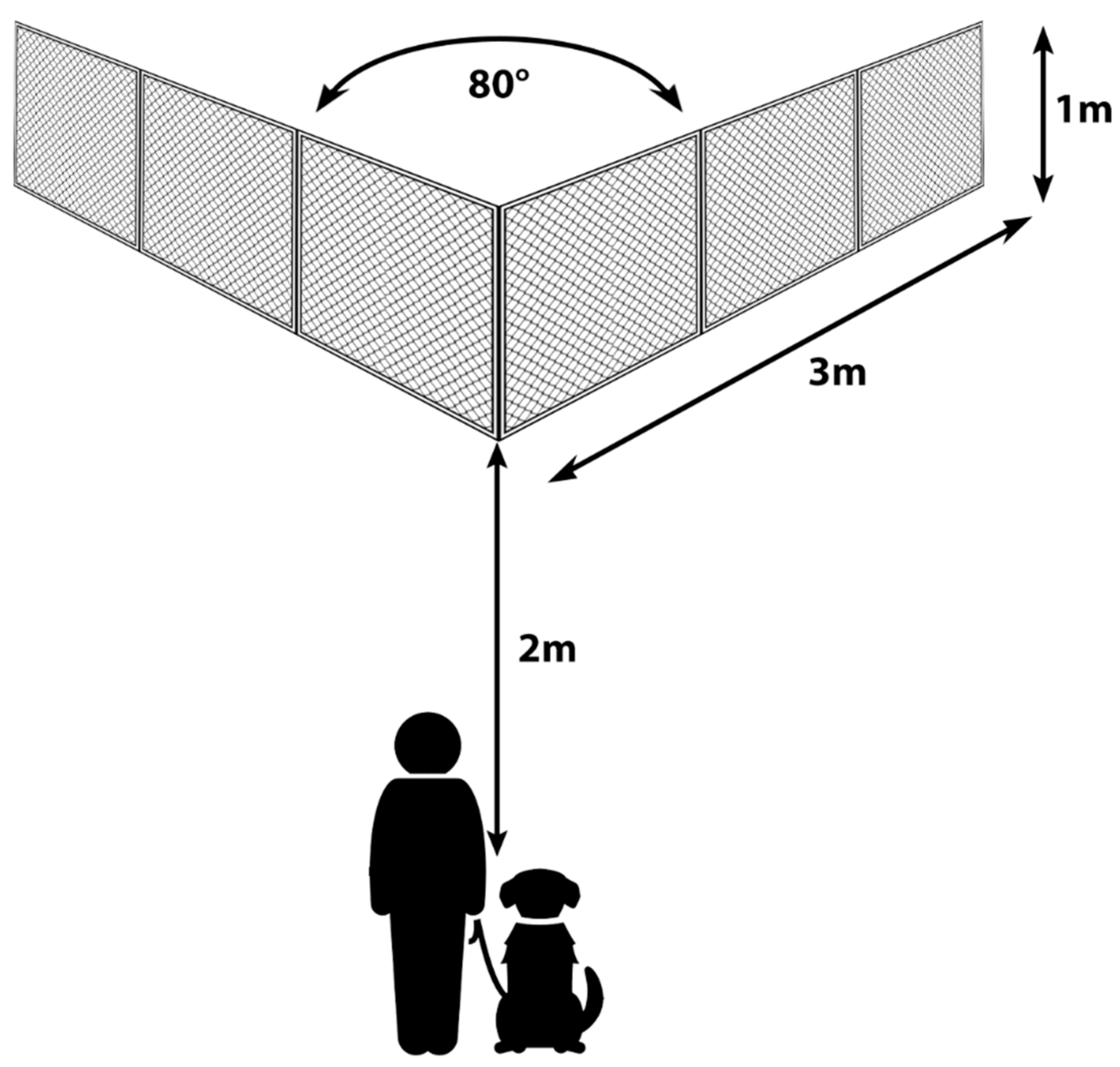
2.4. Detour
2.5. Take-Away-Bone and Roll-Over Tests
2.6. Statistical Analyses
3. Results
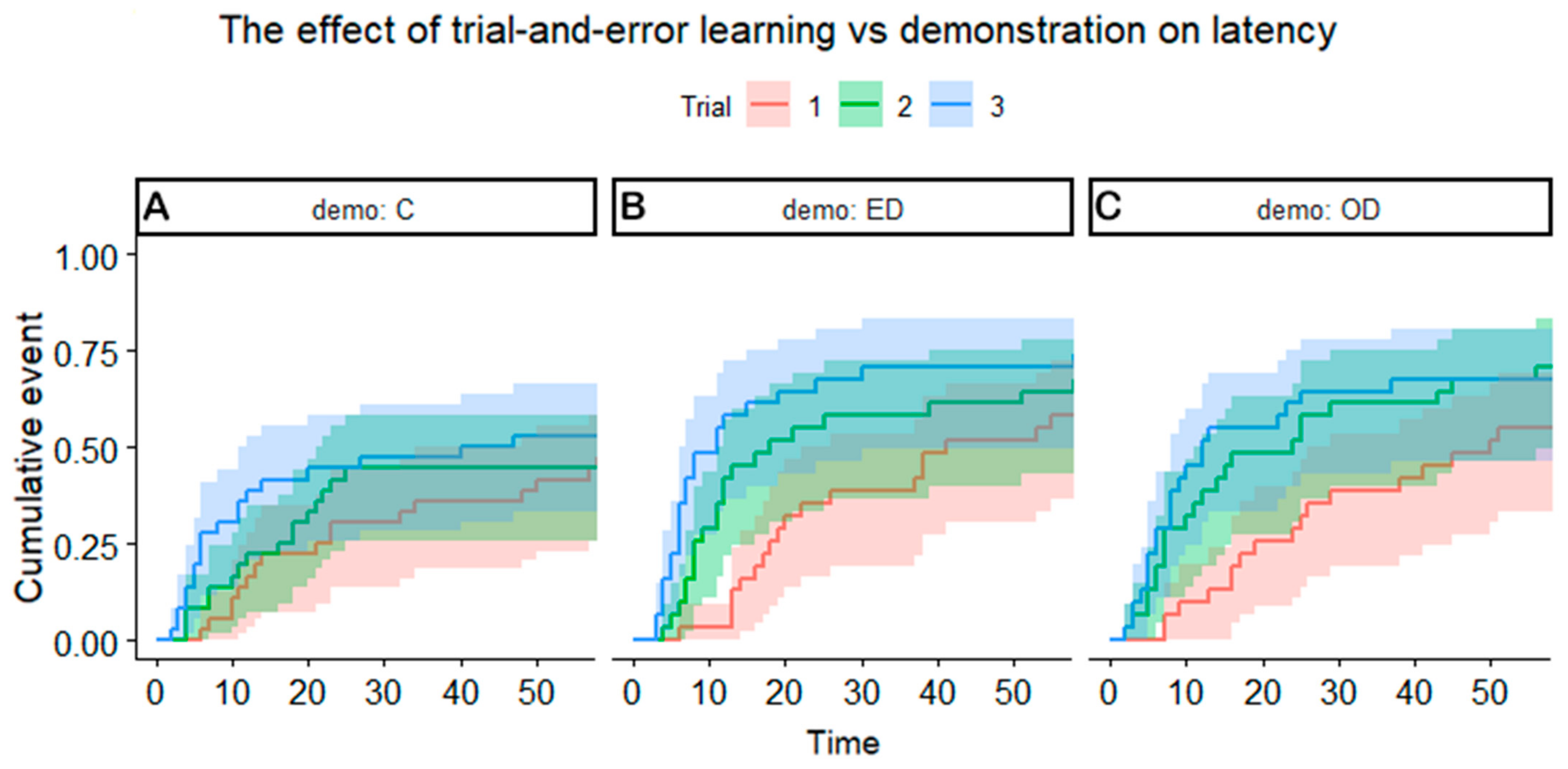
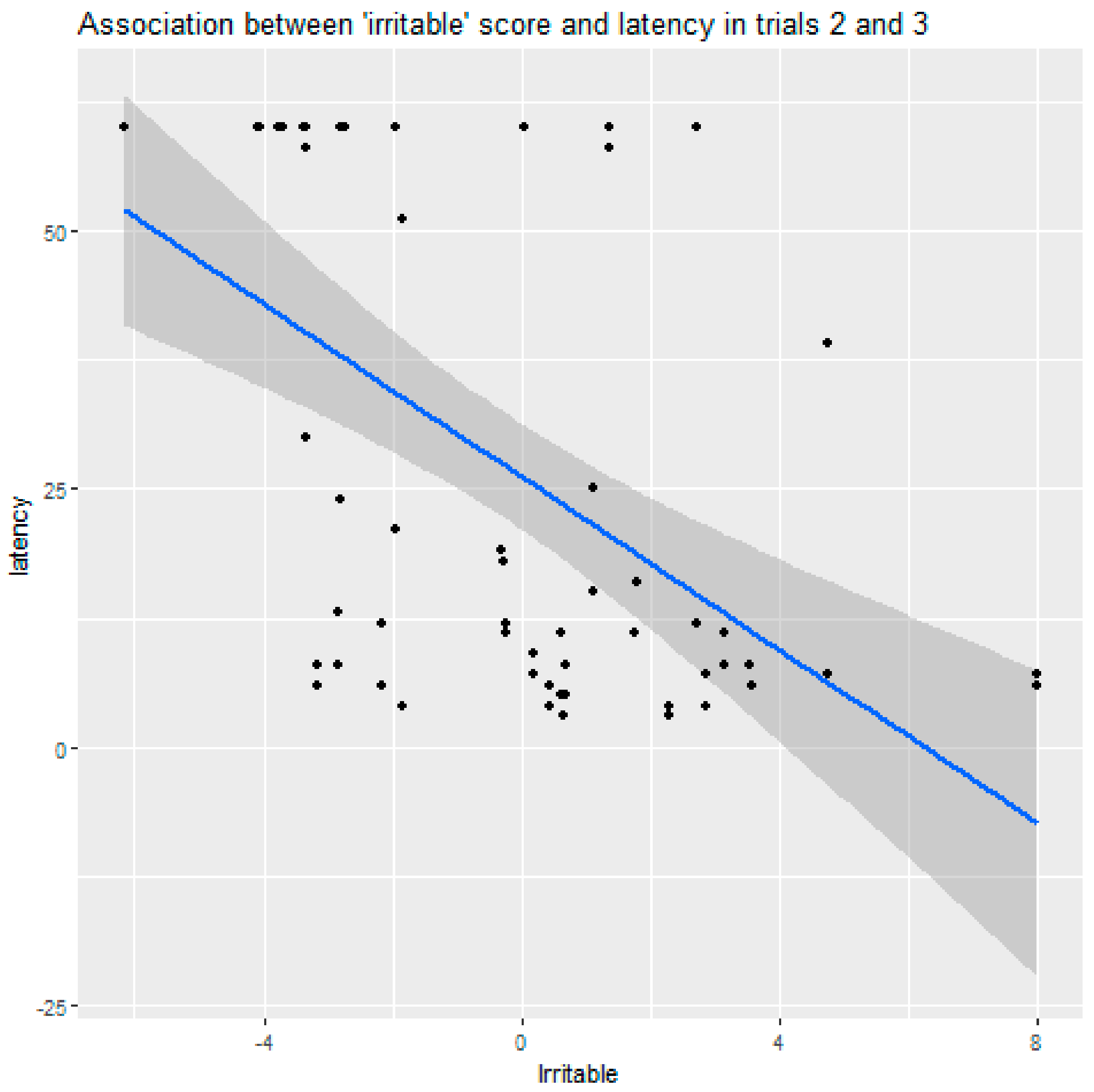
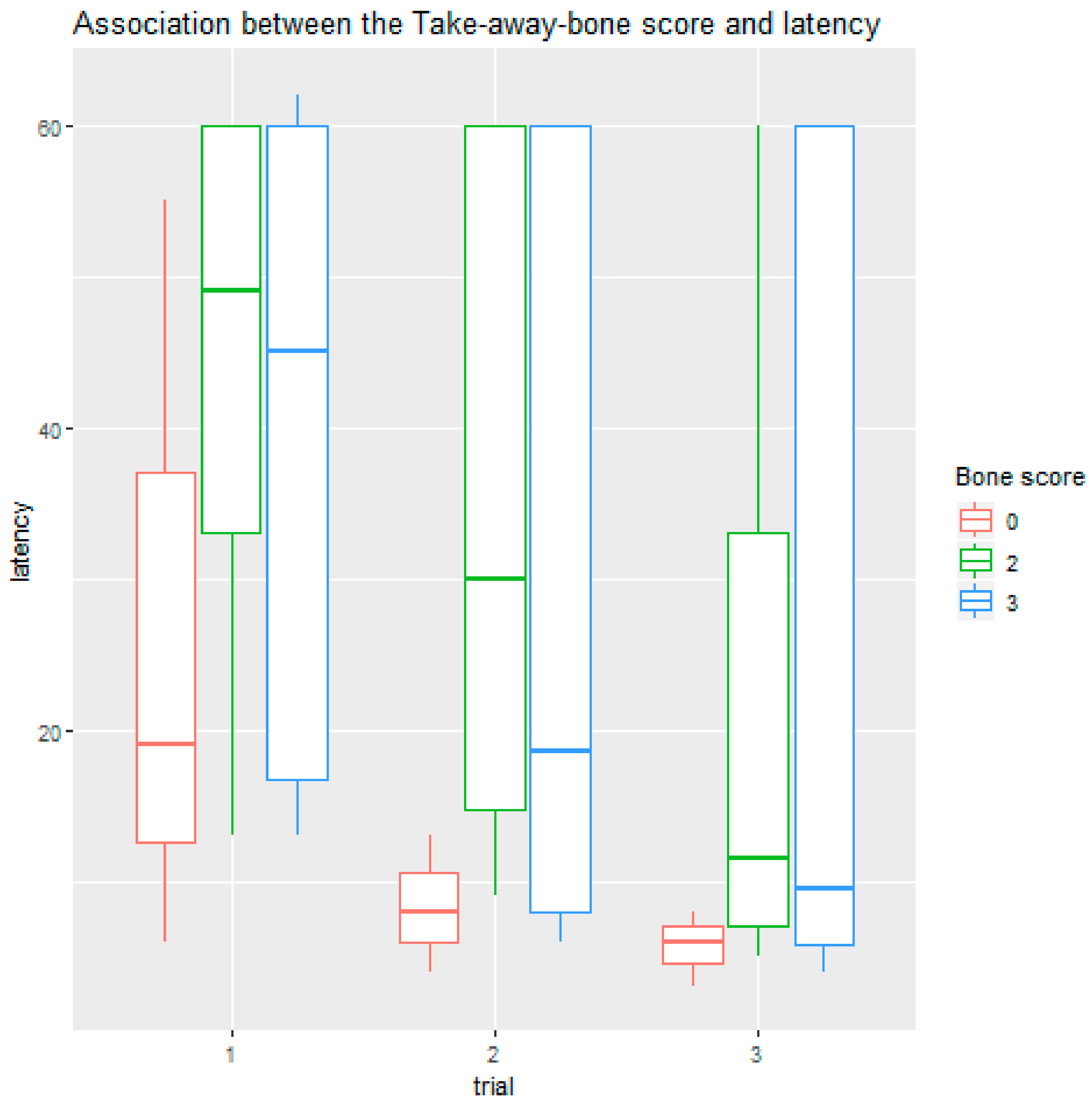
3.1. Latencies
3.2. Looking Back at the Owner
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Perri, A.R.; Feuerborn, T.R.; Frantz, L.A.F.; Larson, G.; Malhi, R.S.; Meltzer, D.J.; Witt, K.E. Dog domestication and the dual dispersal of people and dogs into the Americas. Proc. Natl. Acad. Sci. USA 2021, 118, 118. [Google Scholar] [CrossRef]
- Thalmann, O.; Perri, A.R. Paleogenomic Inferences of Dog Domestication; Springer: Berlin/Heidelberg, Germany, 2018; pp. 273–306. [Google Scholar]
- Lahtinen, M.; Clinnick, D.; Mannermaa, K.; Salonen, J.S.; Viranta, S. Excess protein enabled dog domestication during severe Ice Age winters. Sci. Rep. 2021, 11, 1–5. [Google Scholar] [CrossRef]
- Pörtl, D.; Jung, C. Physiological pathways to rapid prosocial evolution. Biol. Future 2019, 70, 93–102. [Google Scholar] [CrossRef]
- Marshall-Pescini, S.; Cafazzo, S.; Virányi, Z.; Range, F. Integrating social ecology in explanations of wolf–dog behavioral differences. Curr. Opin. Behav. Sci. 2017, 16, 80–86. [Google Scholar] [CrossRef]
- Newsome, T.M.; Ballard, G.-A.; Crowther, M.S.; Fleming, P.J.S.; Dickman, C.R. Dietary niche overlap of free-roaming dingoes and domestic dogs: The role of human-provided food. J. Mammal. 2014, 95, 392–403. [Google Scholar] [CrossRef][Green Version]
- Arendt, M.; Fall, T.; Lindblad-Toh, K.; Axelsson, E. Amylase activity is associated with AMY 2B copy numbers in dog: Implications for dog domestication, diet and diabetes. Anim. Genet. 2014, 45, 716–722. [Google Scholar] [CrossRef] [PubMed]
- Grewal, J.S.; Gloe, T.; Hegedus, J.; Bitterman, K.; Billings, B.K.; Chengetanai, S.; Bentil, S.; Wang, V.X.; Ng, J.C.; Tang, C.Y.; et al. Brain gyrification in wild and domestic canids: Has domestication changed the gyrification index in domestic dogs? J. Comp. Neurol. 2020, 528, 3209–3228. [Google Scholar] [CrossRef]
- Miklósi, Á.; Topál, J. What does it take to become ‘best friends’? Evolutionary changes in canine social competence. Trends Cogn. Sci. 2013, 17, 287–294. [Google Scholar] [CrossRef]
- Marshall-Pescini, S.; Virányi, Z.; Range, F. The Effect of Domestication on Inhibitory Control: Wolves and Dogs Compared. PLoS ONE 2015, 10, e0118469. [Google Scholar] [CrossRef]
- Udell, M.A.R.; Dorey, N.R.; Wynne, C.D.L. What did domestication do to dogs? A new account of dogs’ sensitivity to human actions. Biol. Rev. 2010, 85, 327–345. [Google Scholar] [CrossRef]
- Topál, J.; Gácsi, M. Lessons we should learn from our unique relationship with dogs: An ethological approach. In Crossing Boundriies; Brill: Leiden, The Netherlands, 2012; pp. 161–186. ISBN 9789004233041. [Google Scholar]
- Bhattacharjee, D.; Dev, N.; Gupta, S.; Sau, S.; Sarkar, R.; Biswas, A.; Banerjee, A.; Babu, D.; Mehta, D.; Bhadra, A. Free-ranging dogs show age related plasticity in their ability to follow human pointing. PLoS ONE 2017, 12, e0180643. [Google Scholar] [CrossRef]
- Lenkei, R.; Carreiro, C.; Gácsi, M.; Pongrácz, P. The relationship between functional breed selection and attachment pattern in family dogs (canis familiaris). Appl. Anim. Behav. Sci. 2021, 235, 105231. [Google Scholar] [CrossRef]
- Virányi, Z.; Topál, J.; Miklosi, A.; Csányi, V. A nonverbal test of knowledge attribution: A comparative study on dogs and children. Anim. Cogn. 2005, 9, 13–26. [Google Scholar] [CrossRef] [PubMed]
- Marshall-Pescini, S.; Ceretta, M.; Prato-Previde, E. Do Domestic Dogs Understand Human Actions as Goal-Directed? PLoS ONE 2014, 9, e106530. [Google Scholar] [CrossRef]
- Pongrácz, P.; Miklósi, Á.; Kubinyi, E.; Topál, J.; Csányi, V. Interaction between individual experience and social learning in dogs. Anim. Behav. 2003, 65, 595–603. [Google Scholar] [CrossRef]
- Range, F.; Ritter, C.; Virányi, Z. Testing the myth: Tolerant dogs and aggressive wolves. Proc. R. Soc. B Boil. Sci. 2015, 282, 20150220. [Google Scholar] [CrossRef]
- Kubinyi, E.; Pongrácz, P.; Miklósi, Á. Dog as a model for studying conspecific and heterospecific social learning. J. Veter Behav. 2009, 4, 31–41. [Google Scholar] [CrossRef]
- Jones, A.C.; Gosling, S.D. Temperament and personality in dogs (Canis familiaris): A review and evaluation of past research. Appl. Anim. Behav. Sci. 2005, 95, 1–53. [Google Scholar] [CrossRef]
- Gnanadesikan, G.E.; Hare, B.; Snyder-Mackler, N.; MacLean, E.L. Estimating the heritability of cognitive traits across dog breeds reveals highly heritable inhibitory control and communication factors. Anim. Cogn. 2020, 23, 953–964. [Google Scholar] [CrossRef] [PubMed]
- Gosling, S.D. Personality in Non-human Animals. Soc. Pers. Psychol. Compass 2008, 2, 985–1001. [Google Scholar] [CrossRef]
- Gácsi, M.; McGreevy, P.; Kara, E.; Miklósi, Á. Effects of selection for cooperation and attention in dogs. Behav. Brain Funct. 2009, 5, 31. [Google Scholar] [CrossRef]
- Jarvis, T.; Hall, N.J. Development of point following behaviors in shelter dogs. Learn. Behav. 2020, 48, 335–343. [Google Scholar] [CrossRef]
- Pongrácz, P.; Miklósi, Á.; Vida, V.; Csányi, V. The pet dogs ability for learning from a human demonstrator in a detour task is independent from the breed and age. Appl. Anim. Behav. Sci. 2005, 90, 309–323. [Google Scholar] [CrossRef]
- Pongrácz, P.; Vida, V.; Bánhegyi, P.; Miklósi, Á. How does dominance rank status affect individual and social learning performance in the dog (Canis familiaris)? Anim. Cogn. 2007, 11, 75–82. [Google Scholar] [CrossRef] [PubMed]
- Pongrácz, P.; Bánhegyi, P.; Miklósi, Á. When rank counts—dominant dogs learn better from a human demonstrator in a two-action test. Behaviour 2012, 149, 111–132. [Google Scholar] [CrossRef]
- Cole, E.F.; Quinn, J.L. Personality and problem-solving performance explain competitive ability in the wild. Proc. R. Soc. B Boil. Sci. 2011, 279, 1168–1175. [Google Scholar] [CrossRef]
- Bradshaw, J.W.; Blackwell, E.J.; Casey, R.A. Dominance in domestic dogs—useful construct or bad habit? J. Vet. Behav. 2009, 4, 135–144. [Google Scholar] [CrossRef]
- Schilder, M.B.; Vinke, C.M.; Van Der Borg, J.A. Dominance in domestic dogs revisited: Useful habit and useful construct? J. Veter Behav. 2014, 9, 184–191. [Google Scholar] [CrossRef]
- Van Der Borg, J.A.M.; Schilder, M.B.H.; Vinke, C.M.; De Vries, H. Dominance in Domestic Dogs: A Quantitative Analysis of Its Behavioural Measures. PLoS ONE 2015, 10, e0133978. [Google Scholar] [CrossRef]
- Wallis, L.J.; Iotchev, I.B.; Kubinyi, E. Assertive, trainable and older dogs are perceived as more dominant in multi-dog households. PLoS ONE 2020, 15, e0227253. [Google Scholar] [CrossRef]
- Kubinyi, E.; Wallis, L.J. Dominance in dogs as rated by owners corresponds to ethologically valid markers of dominance. PeerJ 2019, 7, e6838. [Google Scholar] [CrossRef]
- Castro, M.M.D.K. Assessing the Social Organization of Multi-Dog Households: Dog Behaviour, Hormones, Personality, and Demographics; Memorial University of Newfoundland: St. John’s, NL, Canada, 2017. [Google Scholar]
- Abdai, J.; Baño Terencio, C.; Pérez Fraga, P.; Miklósi, Á. Investigating jealous behaviour in dogs. Sci. Rep. 2018, 8, 1–8. [Google Scholar] [CrossRef]
- Blackwell, E.J.; Twells, C.; Seawright, A.; Casey, R.A. The relationship between training methods and the occurrence of behavior problems, as reported by owners, in a population of domestic dogs. J. Veter Behav. 2008, 3, 207–217. [Google Scholar] [CrossRef]
- Harris, C.R.; Prouvost, C. Jealousy in Dogs. PLoS ONE 2014, 9, e94597. [Google Scholar] [CrossRef]
- Schwab, C.; Huber, L. Obey or Not Obey? Dogs (Canis familiaris) Behave Differently in Response to Attentional States of Their Owners. J. Comp. Psychol. 2006, 120, 169–175. [Google Scholar] [CrossRef]
- Pongrácz, P.; Miklósi, Á.; Kubinyi, E.; Gurobi, K.; Topál, J.; Csányi, V. Social learning in dogs: The effect of a human demonstrator on the performance of dogs in a detour task. Anim. Behav. 2001, 62, 1109–1117. [Google Scholar] [CrossRef]
- Bálint, A.; Rieger, G.; Miklósi, Á.; Pongrácz, P. Assessment of owner-directed aggressive behavioural tendencies of dogs in situations of possession and manipulation. R. Soc. Open Sci. 2017, 4, 171040. [Google Scholar] [CrossRef] [PubMed]
- Netto, W.J.; Planta, D.J. Behavioural testing for aggression in the domestic dog. Appl. Anim. Behav. Sci. 1997, 52, 243–263. [Google Scholar] [CrossRef]
- Lazzaroni, M.; Marshall-Pescini, S.; Manzenreiter, H.; Gosch, S.; Přibilová, L.; Darc, L.; McGetrick, J.; Range, F. Why do dogs look back at the human in an impossible task? Looking back behaviour may be over-interpreted. Anim. Cogn. 2020, 23, 427–441. [Google Scholar] [CrossRef] [PubMed]
- Merola, I.; Prato-Previde, E.; Marshall-Pescini, S. Social referencing in dog-owner dyads? Anim. Cogn. 2011, 15, 175–185. [Google Scholar] [CrossRef] [PubMed]
- Seltmann, M.W.; Helle, S.; Adams, M.J.; Mar, K.U.; Lahdenperä, M. Evaluating the personality structure of semi-captive Asian elephants living in their natural habitat. R. Soc. Open Sci. 2018, 5, 172026. [Google Scholar] [CrossRef]
- Péter, A.; Miklósi, Á.; Pongrácz, P. Domestic dogs’ (Canis familiaris) understanding of Projected Video Images of a Human Demonstrator in an Object-choice Task. Ethology 2013, 119, 898–906. [Google Scholar] [CrossRef]
- Merola, I.; Prato-Previde, E.; Lazzaroni, M.; Marshall-Pescini, S. Dogs’ comprehension of referential emotional expressions: Familiar people and familiar emotions are easier. Anim. Cogn. 2013, 17, 373–385. [Google Scholar] [CrossRef] [PubMed]
- Merola, I.; Prato-Previde, E.; Marshall-Pescini, S. Dogs’ Social Referencing towards Owners and Strangers. PLoS ONE 2012, 7, e47653. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The 20 Questions Used to Evaluate Dog–Owner Relationship and Problematic Behaviours. | Variable Name |
|---|---|
| The dog can be called back even if there are other dogs, animals or humans in its vicinity. | callback |
| The owner can easily stop unwanted activities (e.g., by verbal inhibition). | inhib |
| Sometimes, the dog becomes so overactive during play that the activity has to be ended. | overexc |
| The dog intensely defends its food, ball or other assets, even from the owner. | resguard |
| The dog has a skill to seek out and steal food from anywhere, sometimes even from the hands of people. | steal |
| The dog demands physical contact with the owner: it often cuddles or snuggles up to the owner or leans its head in the owner’s lap. | contact |
| The dog growls when being groomed, bathed or when the paws/ears are being cleaned. | groom_growl |
| If being disturbed while resting, the dog growls or snaps. | rest_growl |
| The dog seizes every opportunity to escape and run away, and after successfully getting away, it is very difficult to call him back. | escape |
| The dog follows the owner whenever and wherever it is possible. | follow |
| The dog might bite or snap at others (humans or dogs) in the presence of the owner. | bite |
| The dog responds by barking or growling to situations/events it does not appreciate or opposes. | growl |
| The dog responds threateningly/shows intimidating behaviour if being punished or disciplined. | talks_back |
| The dog is highly frustrated when left alone, continuously barks or shows destructive behaviour. | separation |
| If the dog wants to obtain something, it pursues that persistently or even aggressively. | pursue |
| The dog behaves in an assertive manner. | assertive |
| If the dog once understands that something is forbidden, it is easy to prevent the same thing on a subsequent occasion. | easy_forbid |
| Sometimes, the dog’s attention is so distracted that it impairs its obedience. | inattention |
| The dog often barks in unusual or novel situations. In these cases, it is almost impossible to calm it. | bark |
| During clicker training, the dog is usually trained by the so-called shaping method. | shaping |
| Behaviour | Score |
|---|---|
| Take-away-bone | |
| The dog releases the bone when its back is being stroked with the artificial hand | 0 |
| The dog releases the bone when the owner asks for it or reaches for it with the artificial hand | 1 |
| The dog releases the bone when the artificial hand rests on it | 2 |
| The dog releases the bone after some tugging | 3 |
| The dog does not release the bone | 4 |
| Roll-over | |
| The dog does not show any resistance | 0 |
| The dog resists once, but then can easily be laid on its back | 1 |
| The dog resists/gets up more than once, but eventually can be laid on its back | 2 |
| The dog resists throughout the whole test | 3 |
| Overactive | Irritable | Attachment | ||
|---|---|---|---|---|
| Callback | 0.852852 | The dog can be called back even if there are other dogs, animals or humans in its vicinity. | ||
| Inattention | 0.773509 | Sometimes, the dog’s attention is so distracted that it impairs its obedience. | ||
| Inhib | 0.723818 | The owner can easily stop unwanted activities (e.g., by verbal inhibition). | ||
| Escape | 0.682582 | The dog seizes every opportunity to escape and run away, and after successfully getting away, it is very difficult to call it back. | ||
| Growl | 0.761661 | The dog responds by barking or growling to situations/events it does not appreciate or opposes. | ||
| Pursue | 0.553041 | If the dog wants to obtain something, it pursues that persistently or even aggressively. | ||
| Assertive | 0.538901 | The dog behaves in an assertive manner. | ||
| Bite | 0.525492 | The dog might bite or snap at others (humans or dogs) in the presence of the owner. | ||
| Groom_growl | 0.501269 | The dog growls when being groomed, bathed or when its paws/ears are being cleaned. | ||
| Contact | 0.771242 | The dog demands physical contact with the owner: it often cuddles or snuggles up to the owner or leans its head in the owner’s lap. | ||
| Separation | 0.655851 | The dog is highly frustrated when left alone, continuously barks or shows destructive behaviour. |
| Models for Latencies (Cox Regression Model) | |||||
| Experimenter demonstration group | Est. | Standard Error | Z | p | |
| Trial | Main effect p: < 0.0001 *** | ||||
| Trial 1–2 | 0.857 | 0.0293 | 2.927 | 0.0096 ** | |
| Trial 1–3 | 1.399 | 0.313 | 4.469 | <0.0001 *** | |
| Irritable | 0.242 | 0.0475 | 5.11 | <0.0001 *** | |
| Shaping | 0.142 | 0.0457 | 3.1 | 0.0019 ** | |
| Bone | Main effect p: 0.03412 * | ||||
| Bone 0–2 | −1.556 | 0.499 | −3.12 | 0.0156 * | |
| Bone 0–3 | −1.491 | 0.446 | −3.345 | 0.0074 ** | |
| Owner demonstration group | Est. | Standard Error | Z | p | |
| Trial | Main effect p: 0.0002 *** | ||||
| Trial 1–2 | 1.064 | 0.296 | 3.594 | 0.001 ** | |
| Trial 2–3 | 1.186 | 0.268 | 3.881 | 0.0003 *** | |
| Models for looking back to the owner (GLM) | |||||
| First trial (without demonstration) | |||||
| Experimenter demonstration group | Est. | Standard Error | t | p | |
| Overactive | 5.326 | 1.939 | 2.746 | 0.0102 * | |
| Owner demonstration group | Est. | Standard Error | t | p | |
| Overactive | 5.621 | 1.610 | 3.492 | 0.00156 * | |
| Second and third trials (after demonstration) | |||||
| Experimenter demonstration group | Est. | Standard Error | t | p | |
| Irritable | 3.439 | 1.399 | 2.458 | 0.0169 * | |
| Owner demonstration group | Est. | Standard Error | t | p | |
| Irritable | 1.8483 | 0.8802 | 2.1 | 0.04 * | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pongrácz, P.; Rieger, G.; Vékony, K. Grumpy Dogs Are Smart Learners—The Association between Dog–Owner Relationship and Dogs’ Performance in a Social Learning Task. Animals 2021, 11, 961. https://doi.org/10.3390/ani11040961
Pongrácz P, Rieger G, Vékony K. Grumpy Dogs Are Smart Learners—The Association between Dog–Owner Relationship and Dogs’ Performance in a Social Learning Task. Animals. 2021; 11(4):961. https://doi.org/10.3390/ani11040961
Chicago/Turabian StylePongrácz, Péter, Gabriella Rieger, and Kata Vékony. 2021. "Grumpy Dogs Are Smart Learners—The Association between Dog–Owner Relationship and Dogs’ Performance in a Social Learning Task" Animals 11, no. 4: 961. https://doi.org/10.3390/ani11040961
APA StylePongrácz, P., Rieger, G., & Vékony, K. (2021). Grumpy Dogs Are Smart Learners—The Association between Dog–Owner Relationship and Dogs’ Performance in a Social Learning Task. Animals, 11(4), 961. https://doi.org/10.3390/ani11040961