1. Introduction
Accidents, aging, stroke, and neural diseases cause impairments of motor function. Those with movement difficulties are always hindered by daily living activities. To help impaired patients to gain motor abilities recovery, a rehabilitation treatment needing a repetitive and progressive functional training exercise is required [
1]. However, the conventional rehabilitation exercises performed by therapists and caregivers in free-hand assisting treatments are typically time-consuming and labor-intensive. Robotic devices are therefore necessarily introduced to facilitate rehabilitation training to reduce the cost of therapist labor [
2].
Research studies that were conducted with robotic devices show that robotic training devices are well suited for rehabilitation because the consistency in repetitive rehabilitation therapy can be assured [
3]. Especially in the upper-limb rehabilitation, end-effector-type rehabilitation robots were designed to provide the effective motor recovery assistance [
4], but most structures of these robots are bulky and stationary, and the availability is thus limited in the settings.
Recent findings in exoskeleton robots attract more interest in developing rehabilitation assistance devices due to a low-cost lightweight portable structure [
5]. The 8.5 kg of exoskeleton robot is a mechanical structure type of a wearable device that synchronizes with human limbs, providing powered assistance for weak individuals, or being used in human training for rehabilitation. Commonly, a human user wears an exoskeleton robot to recover motor abilities; the robot must deliver the force to drive an arm to follow the rehabilitation trajectory smoothly and safely [
6], and thus the control technologies for the exoskeleton robots are critical to the improvement of the rehabilitation effect. Kang and Wang [
7] studied an adaptive control strategy for a class of 5- degree of freedom (DOF) upper-limb exoskeleton robot with shoulder, elbow, and wrist joint movements to improve the fault tolerance and safety with unknown large parameter variances or even actuator faults. Brahmi et al. [
8] presented a robust control design for a 7-DOF exoskeleton, CAREX-7, weighing about 1.6 kg, in which the external force is adapted based on backstepping control with a force observer being integrated to estimate the user’s force. Wu et al. [
9] developed a neural-fuzzy adaptive controller using the radial basis function network for a rehabilitation exoskeleton to assist human arm movement. A further experimental investigation was conducted for the position tracking and frequency response. Galiana et al. [
10] used electric motors transmitted with Bowden cables to the compliant brace for a wearable soft robotic device. Rehabilitation exercises were performed even there exist misalignments. Although the aforementioned different control methods have been successfully applied to exoskeleton robots for rehabilitation training, in regard to the aim of developing electric motor-actuated exoskeleton robots, their weights are still considerable due to the design of hanging motors.
Compared to electric motors, soft actuators like pneumatic muscle actuators (PMAs) have the merits of inherent compliance, compactness, high power-to-weight ratio, and low cost [
11,
12]. Current developments in PMAs have made exoskeleton robots lighter and safer. PMA is a braided pneumatic drive that will contract in the axial direction as gas is filled into the braided tube through a hose linked to the compressor. Tsagarakis and Caldwell [
13,
14] described the construction and testing of a seven degree of motion upper arm rehabilitation system that weighs 2 kg. Each joint is actuated via antagonistic pairs of PMAs. PID (Proportion-Integral-Derivative) -based joint torque control was implemented on each joint, and an impedance control scheme was employed for the overall exoskeleton system. Moreover, the designed shoulder adduction/abduction and wrist actuators are directly coupled with the pulleys and mounted to the arm structure. This results in a complicated mechanical structure. Besides, torque sensors, position sensors, and pressure sensors are required for the torque tracking control for training. In comparison with the works of Tsagarakis et al., we install all PMAs to the back frame to make the exoskeleton robot more compact. Moreover, only encoders for the measurement of joint angles are required for the rehabilitation trajectory control. Xiong and Jiang [
15] presented an exoskeleton robotic arm driven by pneumatic muscle actuators for stroke rehabilitation. A PID control method was applied to the patient-active–robot-passive and patient-passive–robot-active rehabilitation training modes. Andrikopoulos et al. [
16] presented the design and implementation of a 2-DOF wrist exoskeletal prototype whose motion is achieved via pneumatic muscle actuators. The movement capabilities were experimentally evaluated via a PID-based control algorithm. Tu et al. [
17] developed a portable upper limb exoskeleton rehabilitation robot that is unidirectionally actuated by PMAs to performs frequent intensive rehabilitation training, and the iterative learning control (ILC) was designed to control this hybrid rehabilitation system to execute repetitive task training. Oguntosin et al. [
18] demonstrated a prototype of a wearable soft robotic assistive device for elbow motion therapies. The highly compliant rotation was realized by a proportional control on pneumatic control of the air. Natividad and Yeow [
19] developed a wearable soft robotic shoulder exosuit that weighs 3.59 kg. Position control was achieved by applying varying magnitudes of pressure to pneumatic actuators. Ohta et al. [
20] presented a robotic arm–wrist–hand system with seven degrees of freedom (DOFs). The arm is pneumatically powered using McKibben type pneumatic artificial muscles, and the wrist and hand motions are actuated by servomotors. Simulation and experimental results were also presented using sliding mode and PID position control. However, the hybrid pneumatic/servomotor-powered actuation makes the structure and control system more complicated.
From the referred literature, it can be found that almost the linear type of controllers are employed for the rehabilitation control of PMA-actuated upper-limb exoskeletons. However, it is rather difficult to control PMA-actuated systems on account of nonlinear phenomena such as friction, the compressibility of air, and external loading such that linear type of controllers are not enough for the improvement of rehabilitation effects [
21,
22].
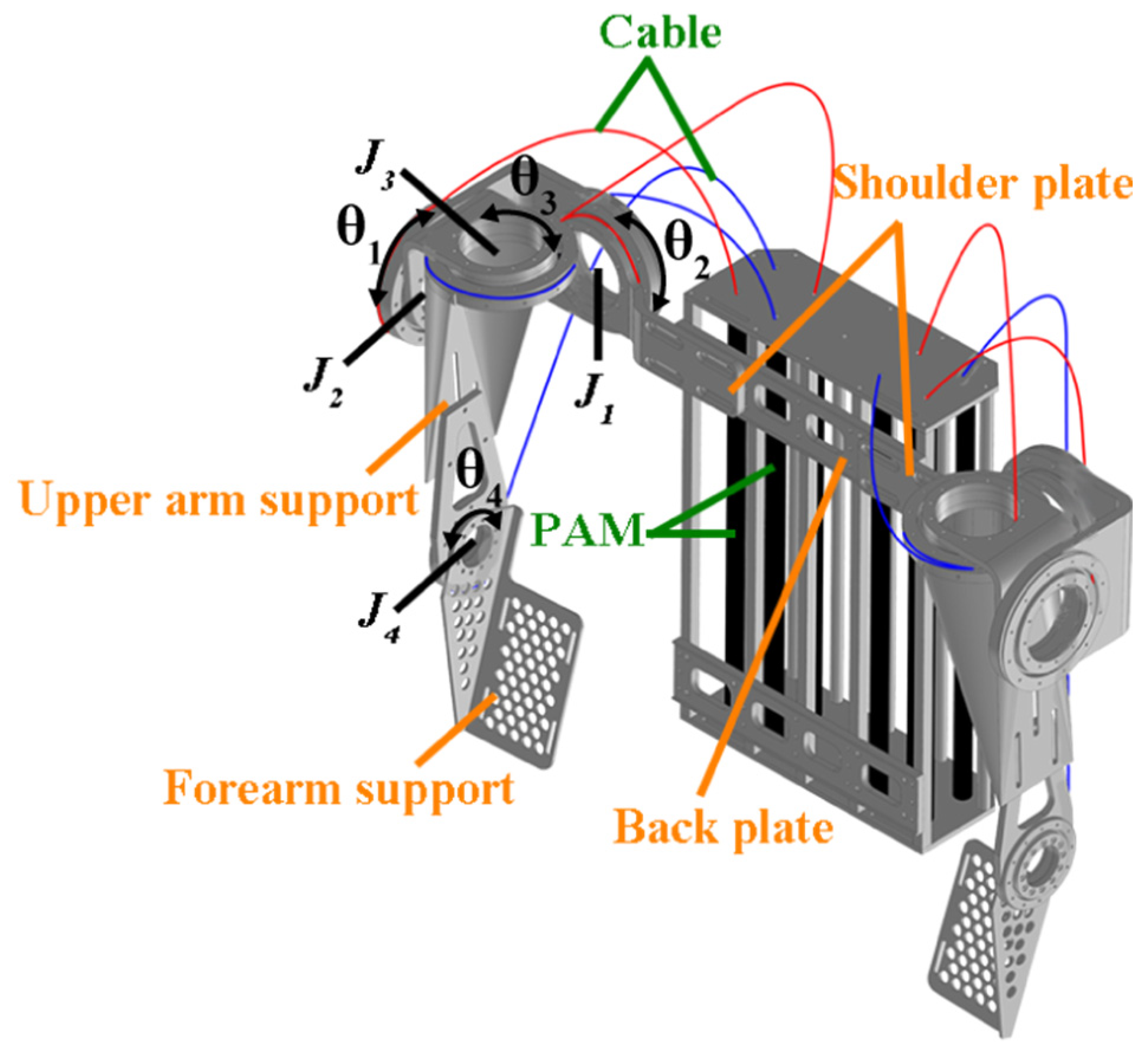
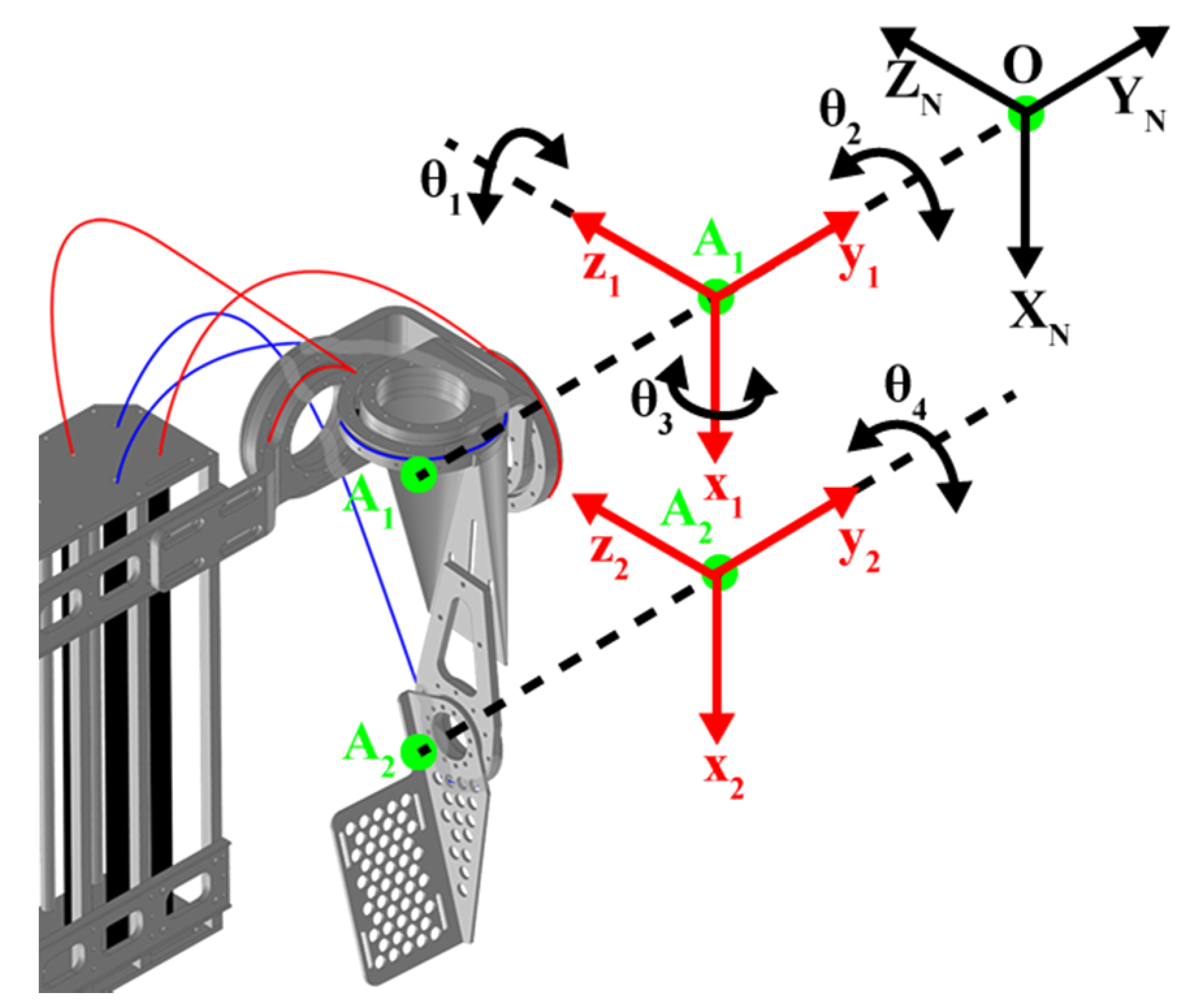
In general, for an upper-limb exoskeleton robot design, actuators, sensors, processors, and the required mechanisms or mechanical linkages must be fitted to the hardware and must conform to the movement of the human arm. Therefore, in this paper, a 4-DOF upper-limb exoskeleton robot driven by PMAs was developed to support the shoulder–elbow motion. Instead of a conventional serial type of manipulator design, the shoulder joint is designed as a ball-socket joint inspired by human anatomy. Moreover, due to their lightweight property, PMAs are used in the proposed exoskeleton robot for safety. Based on a passive rehabilitation mode, the fuzzy sliding mode control was proposed to achieve the rehabilitation trajectory tracking on account of the system uncertainties and nonlinearity such that the rehabilitation performance can be improved. Experimental tests were executed to provide a validation on the proposed architectures and controllers.
4. Control Design
In performing effective rehabilitation training, the effects containing the uncertainties, external disturbances, nonlinearities, and the simplified dynamics model must be addressed for the motion controller design for better tracking performance. Therefore, a fuzzy sliding mode control (FSMC) is proposed for the rehabilitation control of the PMA-actuated upper-limb exoskeleton robot.
4.1. Sliding Mode Control
Due to simple control and easy implementation, the conventional sliding mode controller (SMC) is an effective methodology that has been successfully applied to many nonlinear systems, e.g., electromechanical plants [
30], induction motors [
31], parallel manipulators [
32], auto-warehousing crane systems [
33], and autonomous underwater vehicles [
34]. Especially for the control of PMA, Tondu et al. [
35] applied a second-order sliding mode control for a pneumatic artificial muscle-driven robot-arm. Its twisting algorithm directly drives joints without a chattering phenomenon. Van Damme et al. [
36] presented a proxy-based sliding mode control to control a 2-DOF planar manipulator actuated by pleated pneumatic artificial muscles, and performance was experimentally evaluated. Lilly and Yang [
37] applied the sliding mode technique to control the elbow motion of the arm with antagonistic pneumatic muscle actuator groups. The boundary layer concept was used to eliminate chattering. To remove the discontinuous signal of the SMC, different methodologies were employed in the mentioned references. In our work, the FSMC was used for the rehabilitation control of the upper-limb exoskeleton robot. The fuzzy type of reaching control not only can eliminate chattering but also can overcome system uncertainties. The desired closed-loop performance of the FSMC is first represented by a sliding surface that the SMC specifies. In a second-order system, a time-varying sliding surface is defined as
where
is a symmetric positive definite matrix and linked to the desired performance of the closed-loop system;
is the tracking errors in the joint angles.
If a reference joint rate is introduced by
, the sliding surface can be interpreted as the tracking velocity error concerning the reference joint rate, and Equation (8) is expressed as
Indeed, Equation (9) may be interesting as a velocity error term. When at the reaching phase, a designed hitting control law compels the system trajectories onto the sliding surface. If the system state slides to the origin along a trajectory in a sliding mode, it remains on the sliding surface. Therefore, to complete the trajectory tracking, a sliding mode controller comprising the nominal control
and the reaching control
was designed for the rehabilitation control of the exoskeleton robot. Namely, the control input takes the form
If the system dynamics is completely known, the equivalent control
is the control input vector that makes the derivative of a Lyapunov function
V equal to 0. That is, a Lyapunov function is chosen as
then taking differential
V,
If the control input is chosen as
,
would be zero. However, if the exoskeleton robot parameters were not completely known to us, the equivalent control
would be defined as
in which
,
,
and
are the estimates of
B,
M,
H, and
G, and with
,
, and
bounded. The diagonal control gain components
of
B with 0<
<b
i<
are unknown but of known bounds. Therefore, the estimated
of gain b
i can be naturally chosen as 0<
<
<
, which is the geometric mean of the above bounds.
The reaching control
in (10) can be conventionally expressed as
in which
is defined as the switching gain vector of components
, which is related to the upper bound of uncertainties, and sign[.] is the sign function. The reaching control
mainly accounts for system uncertainties or external disturbances.
4.2. Fuzzy Sliding Mode Control Design
The uncertain values of
s and the associated discontinuous reaching control always generate chattering phenomena. To eliminate the jitter problem, a fuzzy sliding mode controller (FSMC) [
38] is used instead of the SMC, and thus, the reaching control with a fuzzy type is represented as
is defined as the fuzzy gain vector of components
. The fuzzy function FSMC maps two linguistic input variables, s(t), and
(t), to the linguistic output based on the Mamdani inferred rules. The fuzzy rules are shown in
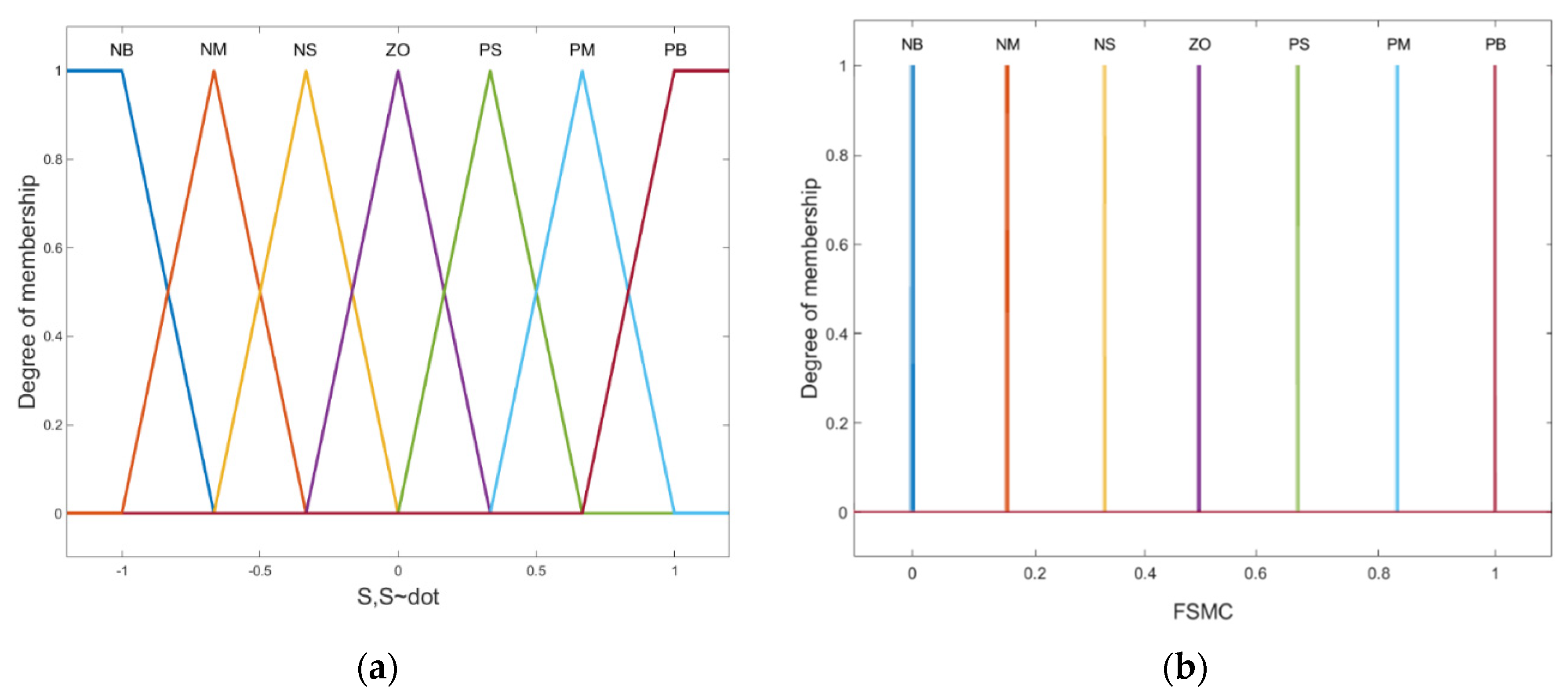
Table 2, in which there are seven fuzzy rules: NB (Negative Big), NM (Negative Medium), NS (Negative Small), Z (Zero), PS (Positive Small), PM (Positive Medium), and PB (Positive Big). The input–output relationships are determined based on a fuzzy logic IF-THEN rule basis, which is typically used in the fuzzy inference system and is expressed as
:: IF
is
and
is
THEN
is
, i = 1,…,n. in which
and
are the input fuzzy sets;
is the output fuzzy set.
The membership functions of input and output linguistic variables are chosen as in
Figure 6. The product inference with singleton fuzzification and centroid defuzzification methods has been utilized for fuzzy implications. In the scheme as proposed in [
39], the normalized fuzzy function
has been set as (
)(
.
4.3. Stability Analysis
The equivalent control (13) and the reaching control (15) are combined to (10) to control the upper-limb exoskeleton robot with the dynamics Equation (7). A Lyapunov function is chosen as Equation (11), and, thus, the robust trajectory control for rehabilitation tasks is further proved by the Lyapunov stability analysis.
Differentiating (11),
in which
,
,
, and
that is defined as the i-th diagonal component of
. Furthermore, if (16) is expressed in indexing, it becomes
If choosing , letting the reaching control gains be with << always allows satisfying the reaching condition . Thus, it can be guaranteed that the system reaches the surface s = 0 in a finite time. The trajectories remain on the surface once, and, therefore, the desired trajectories are obtained. This completes the stability proof and guarantees the asymptotic stability of the closed-loop system.
Although mainly depends on the equivalent errors , , , we can estimate the bounds of these equivalent errors so that is also bounded. By letting and be substituted into the reaching control , the controller u(t) =+ for the rehabilitation, and control is thus implementable.
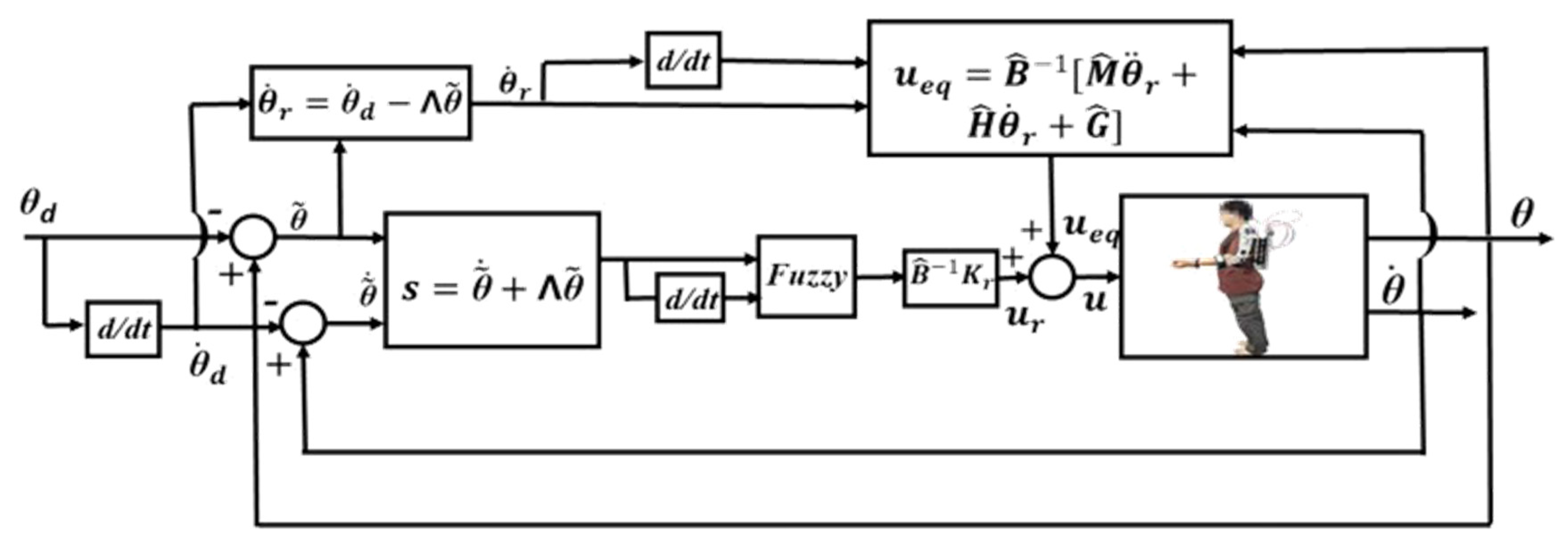
The configuration of the FSMC structure for the PMA-actuated upper-limb exoskeleton robot is shown in
Figure 7. The desired joint angles
imply a rehabilitation trajectory. The control signals
u for the PMAs are synthesized based on the aforementioned FSMC design, and, thus, the PMAs produce the corresponding actuating forces to drive the exoskeleton robot to track the rehabilitation trajectory.
5. Realization and Discussion
Experiments were conducted to simulate a rehabilitation exercise, executing the robot assistance rehabilitation based on the proposed PMA-actuated upper-limb exoskeleton robot with the designed control architecture. The system parameters including the wear’s upper arm and forearm are measured or estimated by the CAD model with = 1.26 kg, = 0.63 kg, = 0.1134 kg·, = 0.0252 kg·, = 0.3 m, and = 0.2 m. The joint radii are = 0.06 m, = 0.06 m, = 0.06 m, and = 0.03 m. The PMAs in use are = 2 cm, = 30 cm, = 25°, α = 480, β = 17.58. The spring coefficient is k = 2.2 N/m. The reaching control gain matrix is chosen as = diag (0.8, 0.6, 0.2, 0.5).
5.1. Rehabilitation Trajectory Planning
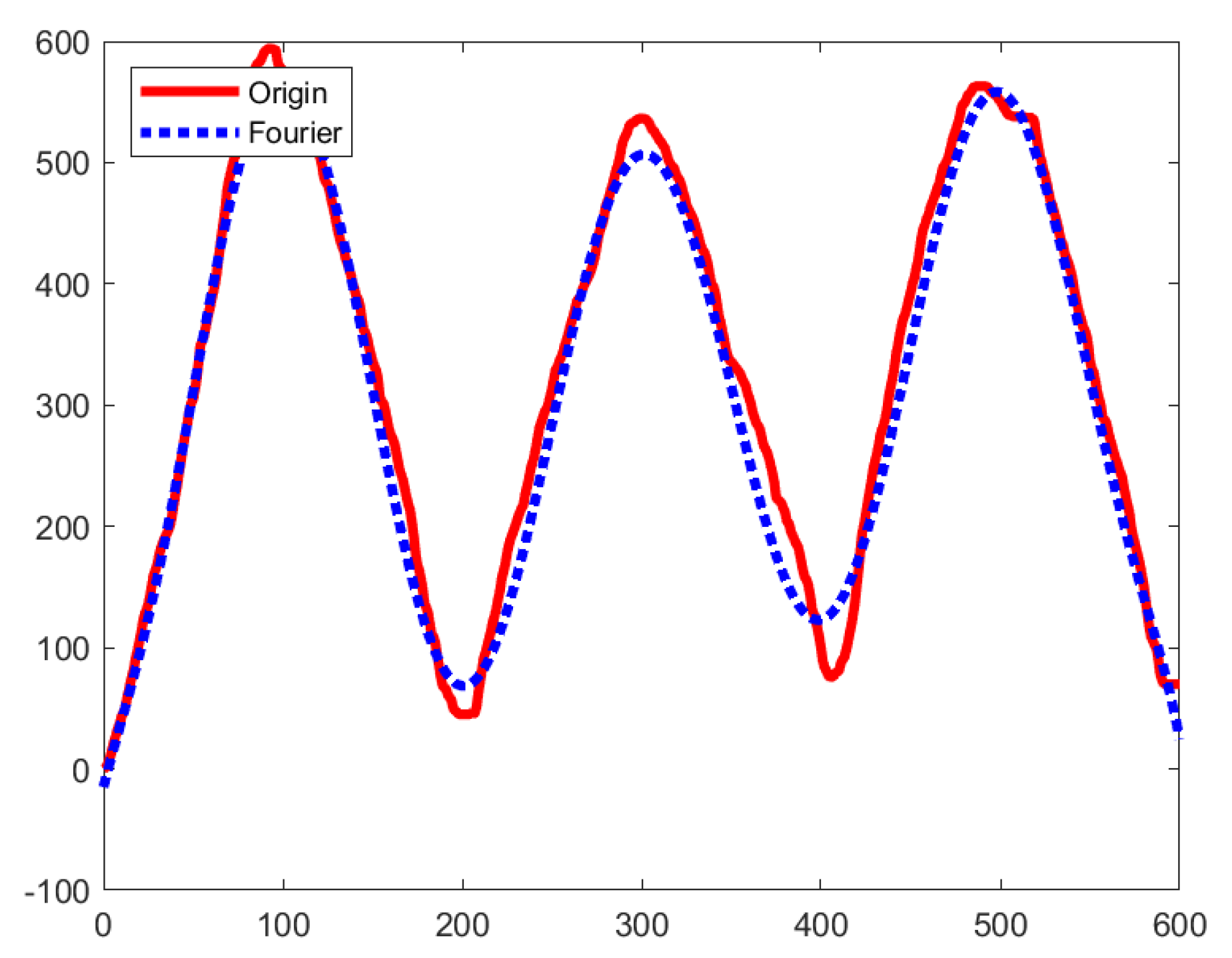
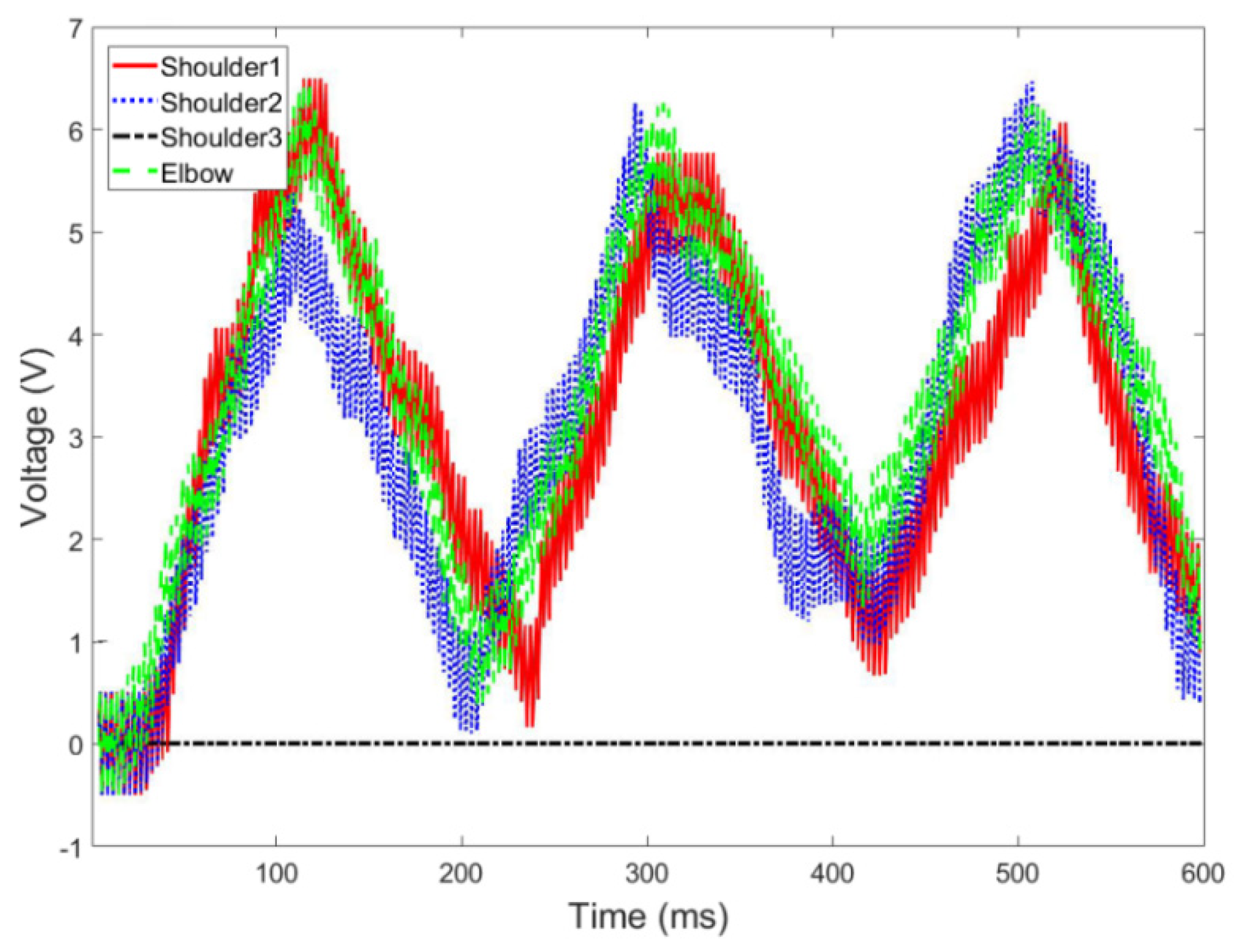
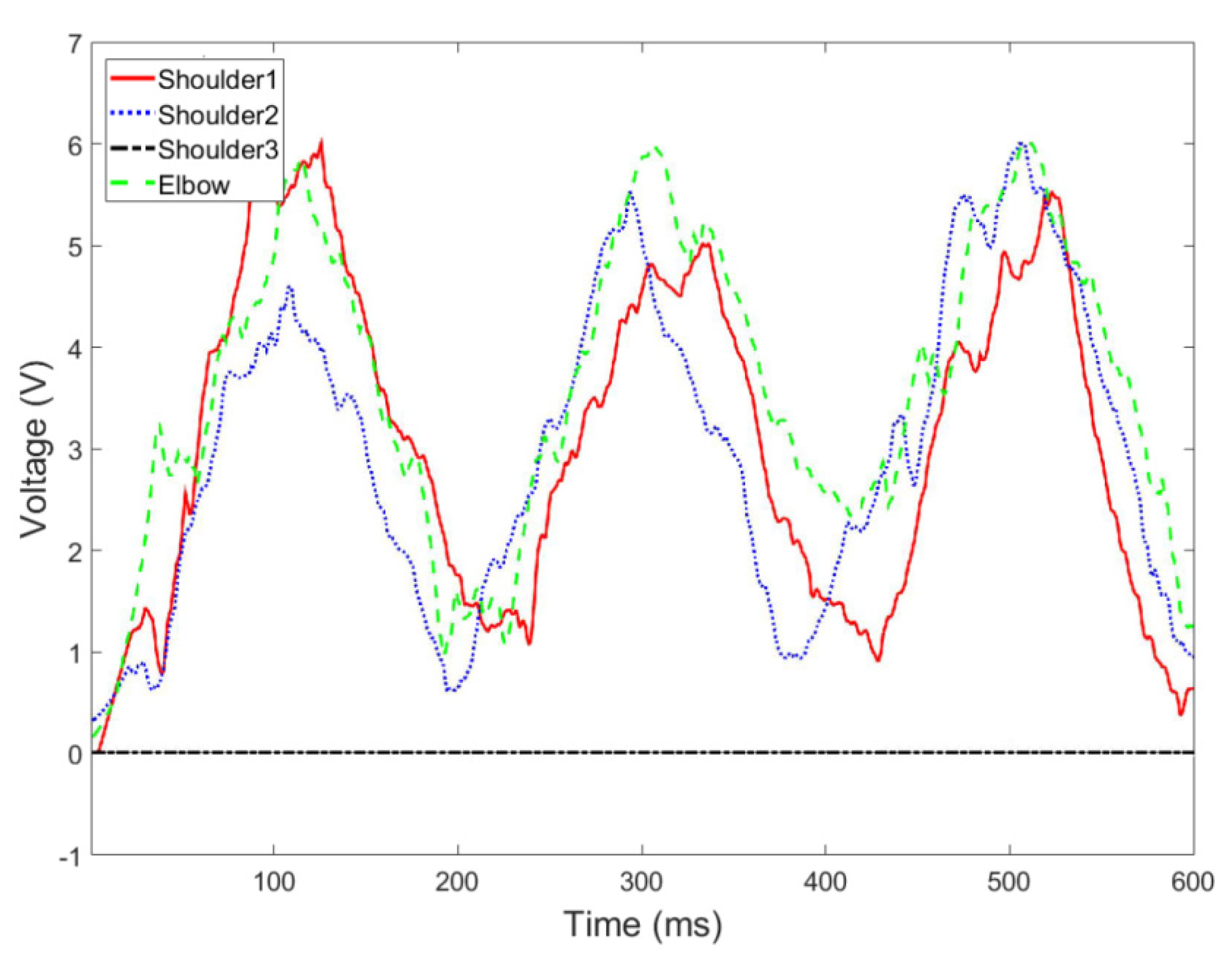
Based on a rehabilitation process in a free-hand manner, one held the end-effector to drive the exoskeleton robot according to the rehabilitation motions of the upper limbs. The joint angles at each joint were then measured and recorded by the encoders. However, the recoded data are not smooth due to the unconscious tremor of hands. Moreover, other external disturbances also deteriorate the continuity of the rehabilitation trajectories, reducing the execution performance.
Conventionally, curve fitting is usually utilized to smooth a set of discrete points. Many methods can be applied to the curve fitting; in this paper, the Fourier series method was used to smooth and generate the desired rehabilitation trajectories because the Fourier series have the cycle propriety that satisfies the repeatability and consistency during the rehabilitation process. The Fourier series is expressed as
where the Fourier coefficients
,
,
, …,
,
along with the rehabilitation trajectory frequency
are solved by the optimization algorithms based on recorded raw data.
Figure 8 shows the curve fitting trajectory in the Fourier series based on the original raw data. It is seen that the modified trajectory is more smooth and can be appropriate for the rehabilitation trajectory.
5.2. Realization on Shoulder Joints J1, J2 and Elbow Joint J4 Rehabilitation
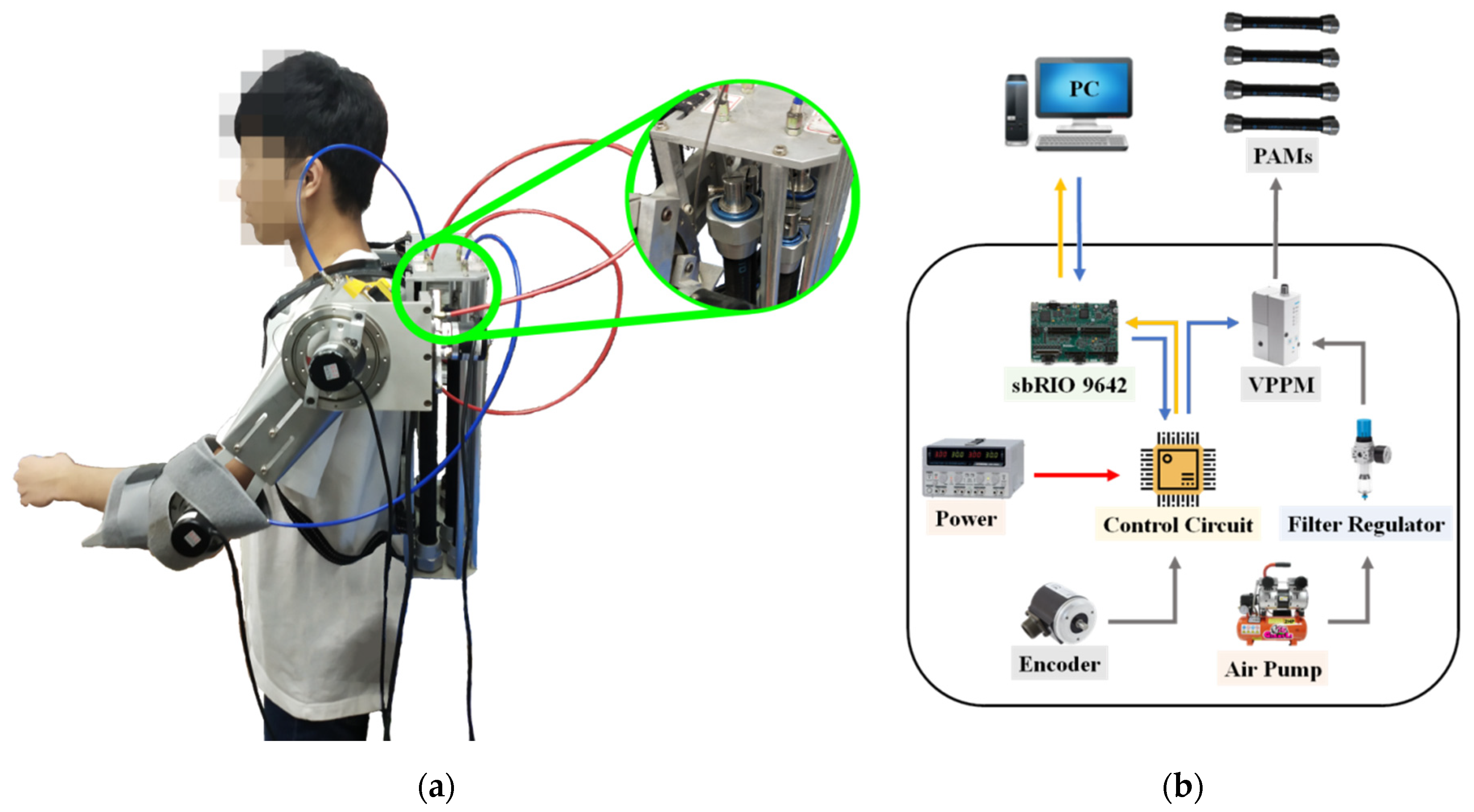
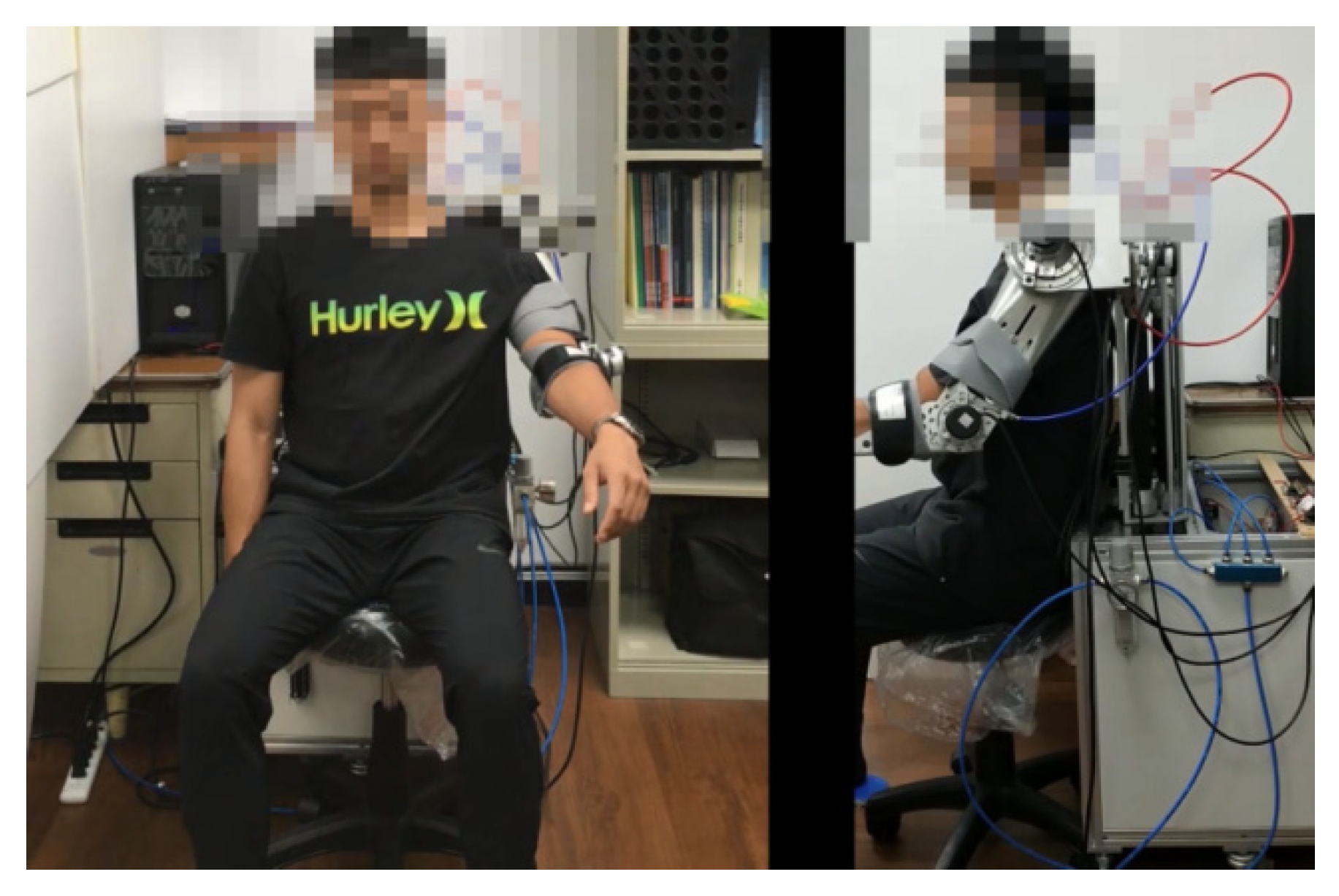
As shown in
Figure 9, a subject wore the exoskeleton robot with his arms initially hanging down. The rehabilitation trajectory was specified with shoulder internal/external rotation
= 0, which is a very common trajectory on rehabilitation exercises. The frequencies were determined as
= 0.009398,
= 0.00966,
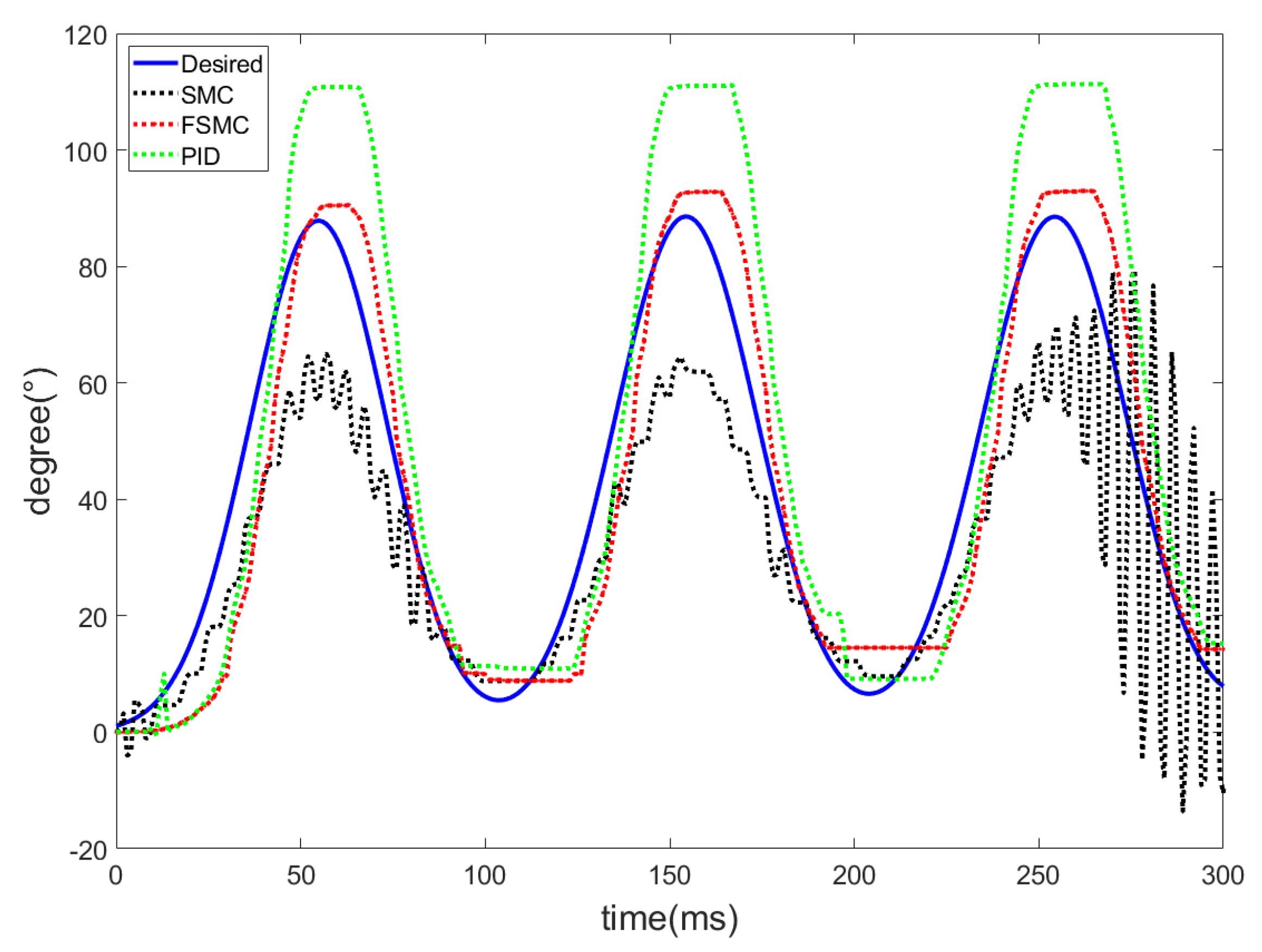
= 0.009336 for the corresponding desired joint trajectories. Three controllers, PID, sliding mode control (SMC), and fuzzy sliding mode control (FSMC) were conducted and compared. The tuning process for the PID control is based on the Ziegler–Nichols method. Kp is increased (from zero) until it reaches the ultimate gain, at which the output of the control loop has stable and consistent oscillations, and then to obtain Ki and Kd.
As shown in
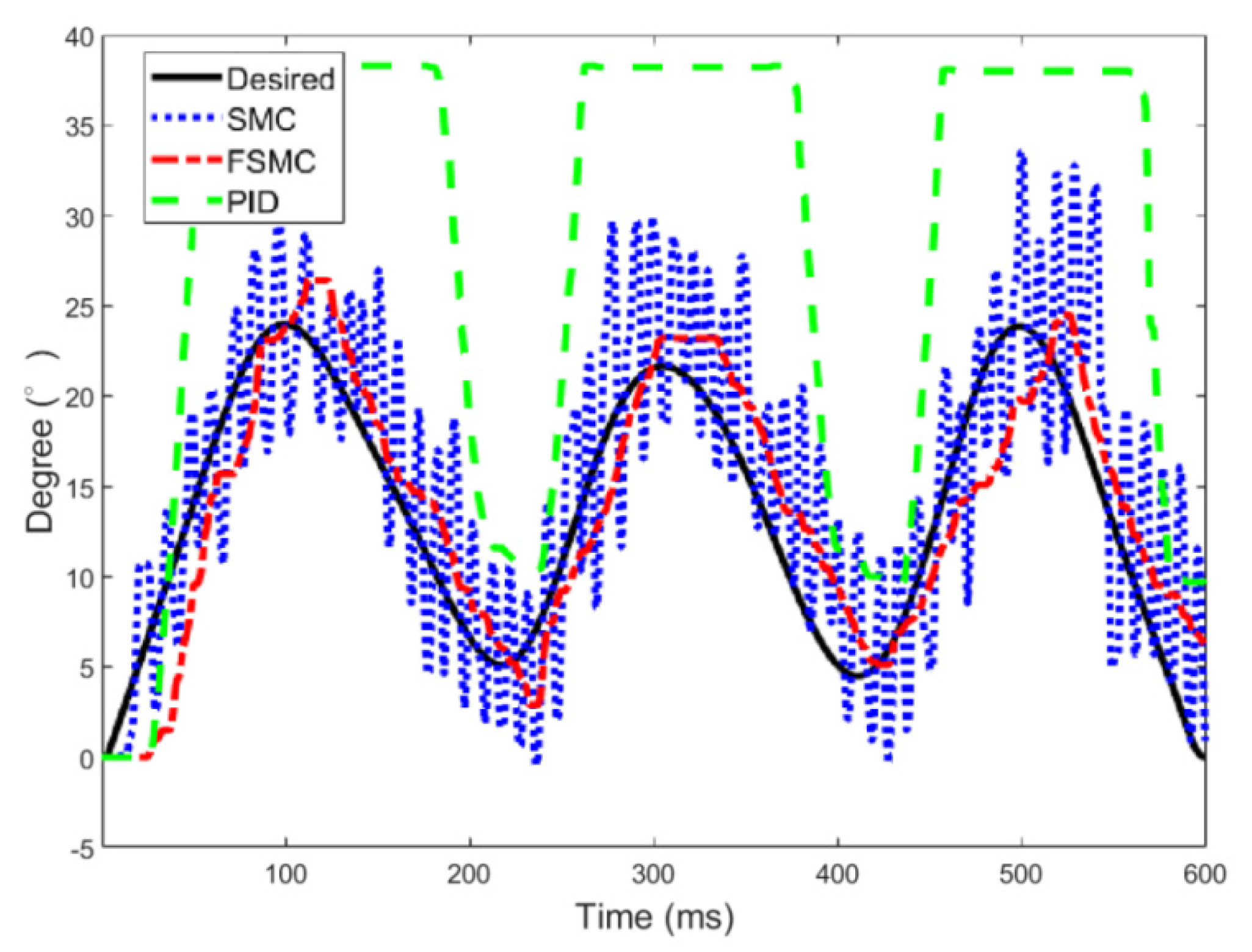
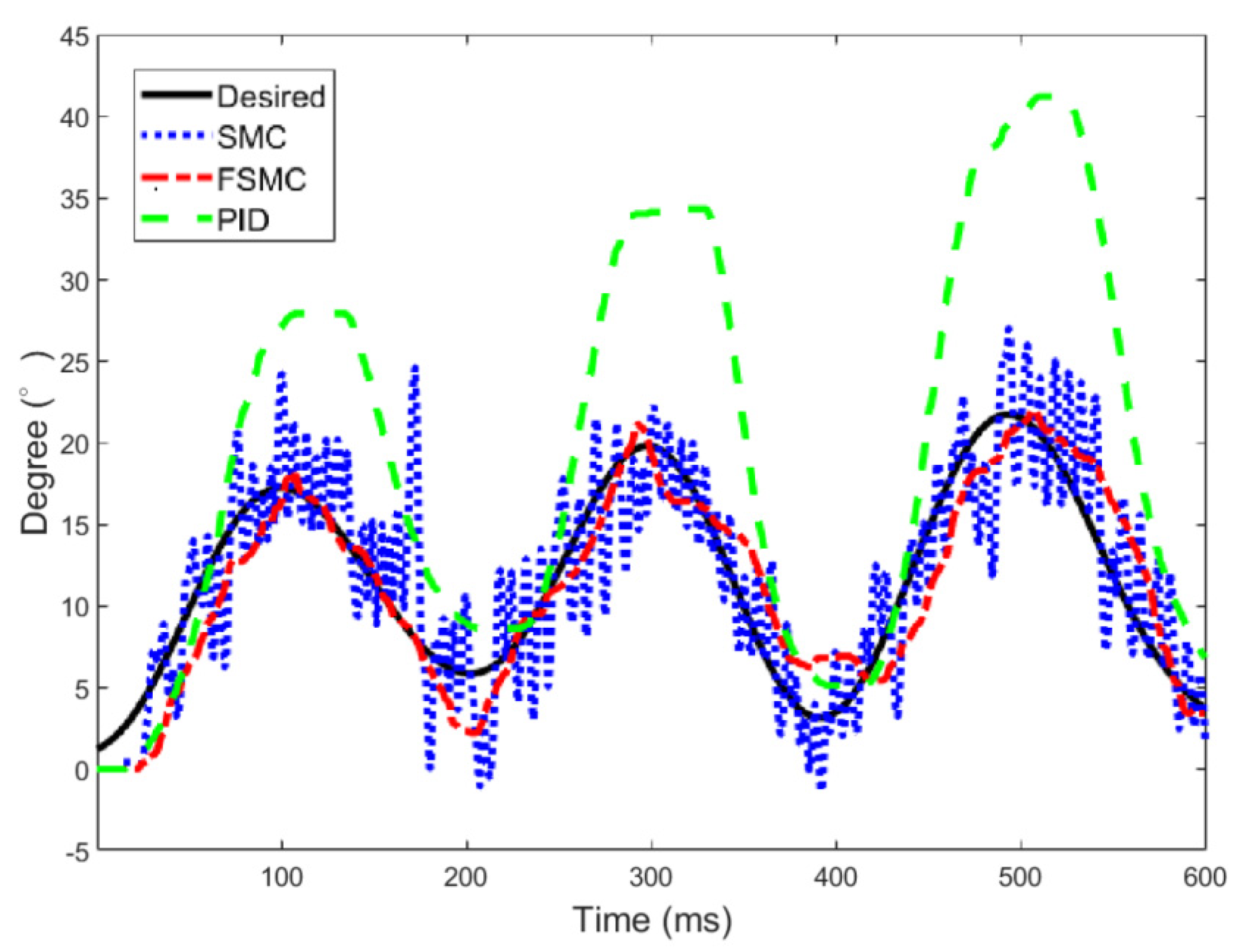
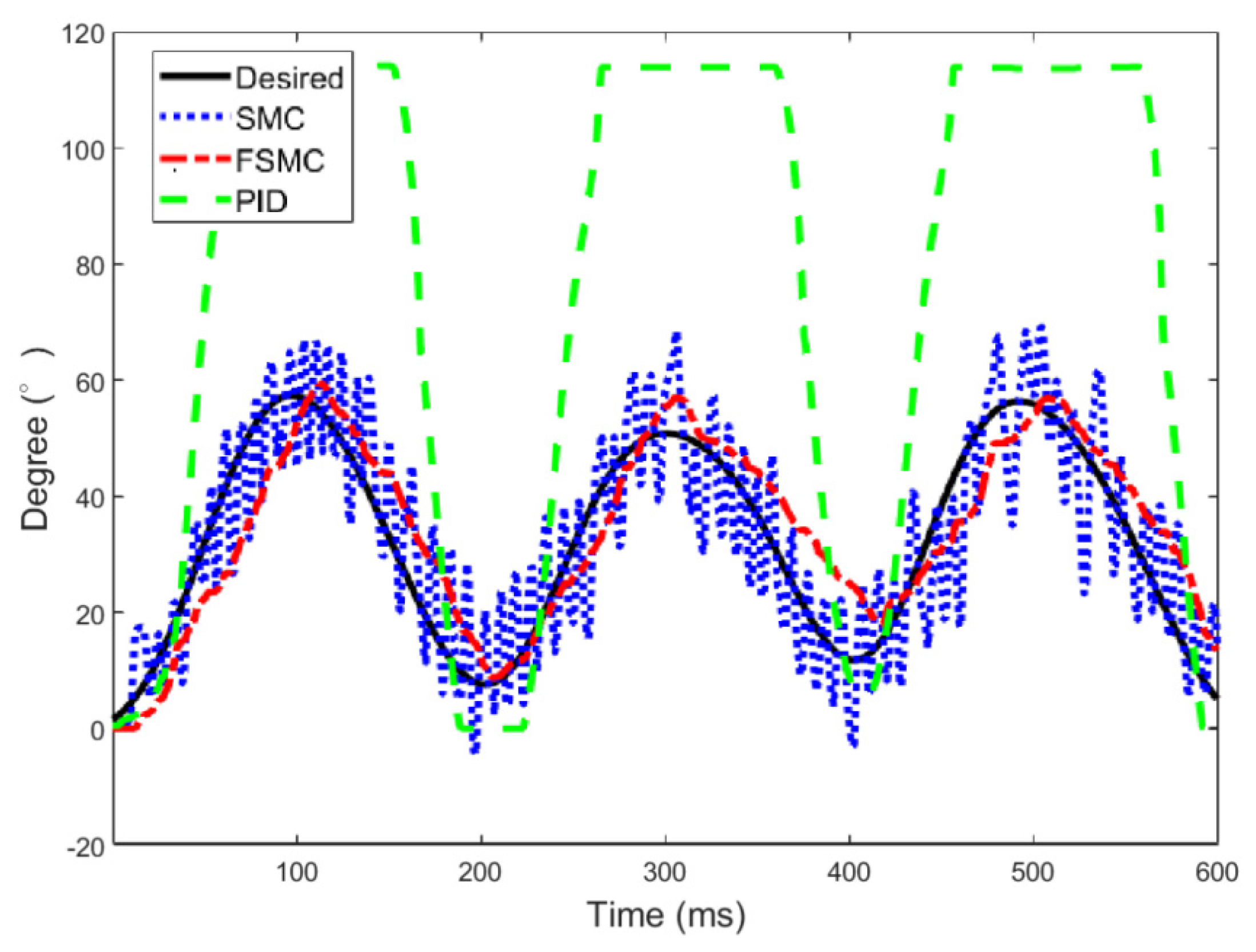
Figure 10, the PMA-actuated upper-limb exoskeleton robot drove the arm according to the planned trajectory. The trajectories of the joints
,
, and
for the three controllers are separately presented in
Figure 11,
Figure 12 and
Figure 13. The results show that the PID control is very hard to track the planned trajectories because of the compressibility of air and nonlinear effects and uncertainties of the robot system. Besides, when the air pressure significantly varies, the PID control will cause a violent response. Moreover, the PMA contraction rate cannot respond very fast to errors, and, thus, a control performance is saturated. The SMC can overcome uncertain disturbances to follow the rehabilitation trajectories, but accompanying chattering may lead to harm to subjects, thus, it is clear that the proposed FSMC has superior tracking performance to the other two controllers for the PMA-actuated exoskeleton robot on the rehabilitation applications.
The control signals for the SMC and FSMC are shown in
Figure 14 and
Figure 15. The resulted chattering signals on a conventional SMC can be eliminated using the FSMC.
5.3. Rehabilitation for Shoulder Internal/External Rotation
In this rehabilitation maneuver as shown in
Figure 16, the shoulder internal/external rotation with a frequency of
= 0.004682 was realized at the fixed joint angles
,
,
. The trajectories for the shoulder internal/external rotation are displayed in
Figure 17. The FSMC has better tracking performance for the rehabilitation exercises. Notably, the chattering increases largely after the third rehabilitation cycle for the SMC and thus results in unpredicted rehabilitation disturbance.
The RMS errors for the three controllers, PID, SMC, and FSMC, in the rehabilitation maneuvers are presented in
Table 3. The FSMC has a better tracking performance in our designed PMA-actuated exoskeleton robot.
5.4. Rehabilitation while Suffering from Instant Spasm and Tremor
Sometimes spasm and tremors may occur during a rehabilitation process [
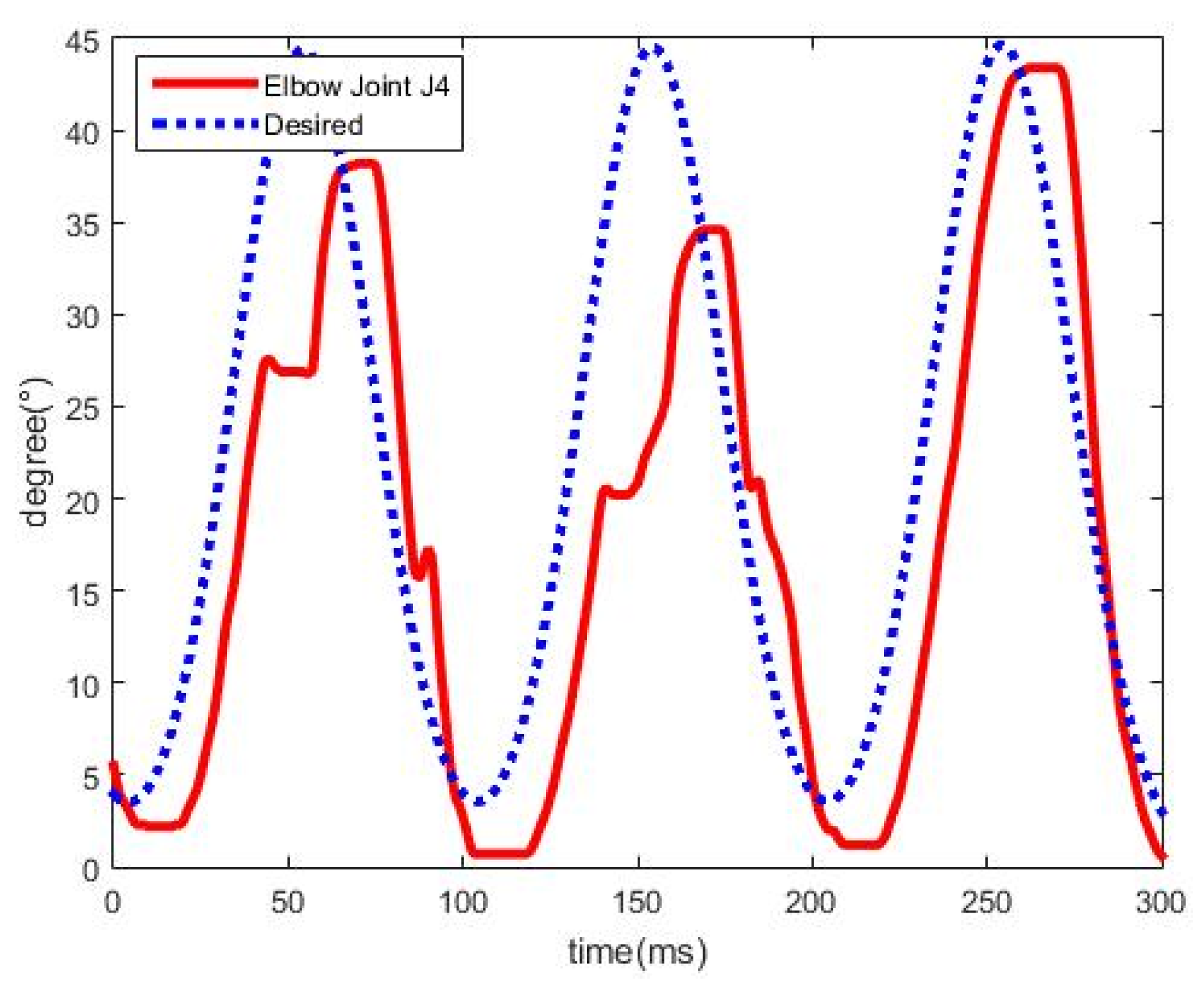
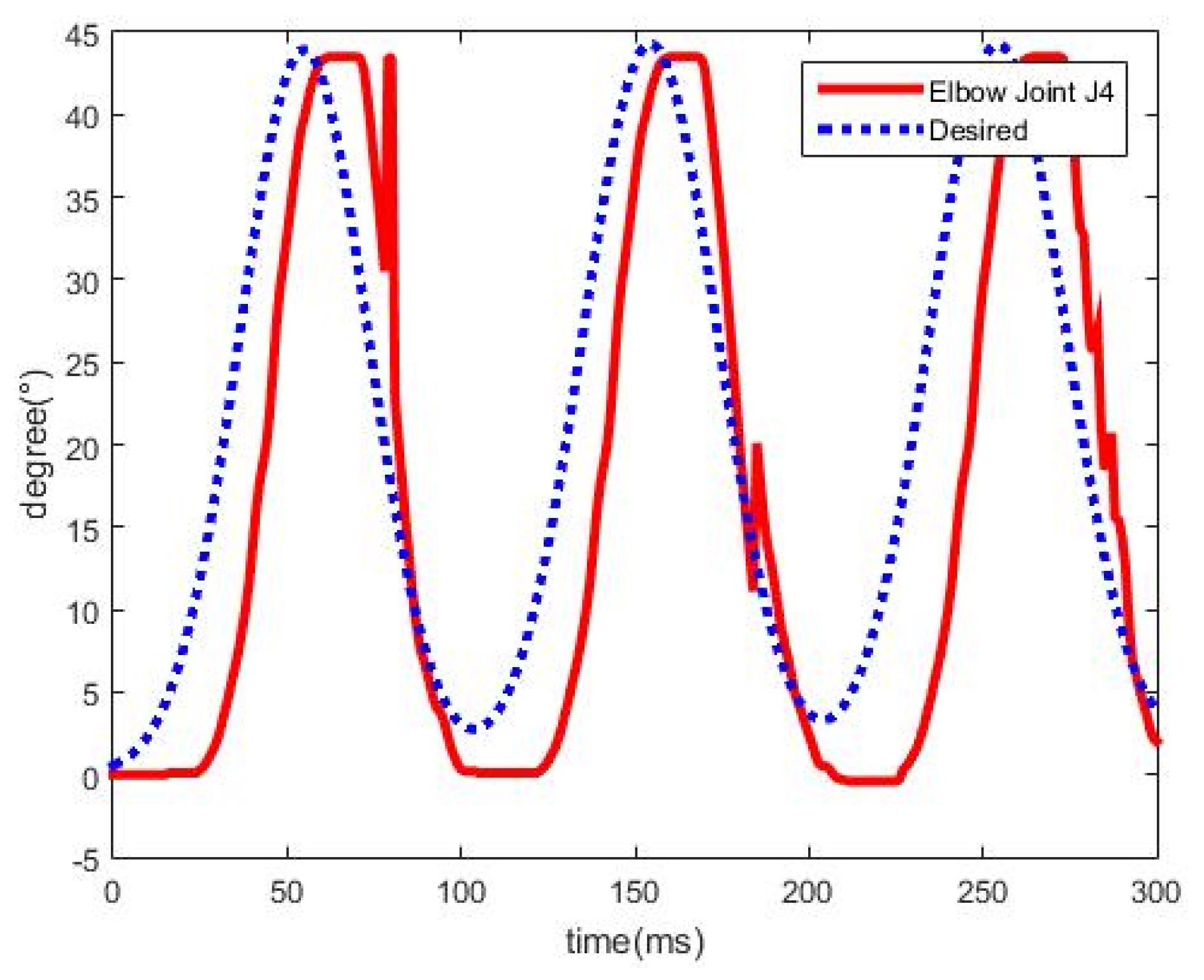
40]. These phenomena must be detected to ensure the wear’s safety. Spasm is classified as the instant type and sustaining type. For the sustaining spasm, the training process must be halted by releasing the pressure inside the PMAs. However, the instant type of spasm vanishes soon after it happens. In this section, a flexion/extension exercise on the elbow joint
was implemented with instant spasm and tremor occurring during the rehabilitation process.
Figure 18 displays the trajectories of elbow joint
using the proposed FSMC with an instant spasm occurring. From the results, the instant spasm temporarily leads to larger tracking errors, however, as the instant spasm vanishes, the rehabilitation process can continue with a stable trajectory tracking.
For the tremor occurring in the rehabilitation exercise, the trajectories of elbow joint
are as shown in
Figure 19. It is found that the proposed FSMC is robust to the tremor while carrying out rehabilitation exercises.
6. Conclusions
This paper concludes with the following main contributions: a new 4-DOF PMA-actuated upper-limb exoskeleton robot for rehabilitation training was developed. The controller, FSMC, taking advantage of the robustness of the SMC and chattering elimination of FC, was designed for the control of the exoskeleton robot. Based on the realization of rehabilitation exercise, the tracking performance of the FSMC is observed in comparison to that of the PID and SMC. The executed rehabilitation maneuvers, especially with instant spasm and tremor happening, validate the availability and robustness of the designed PMA-actuated exoskeleton robot on the rehabilitation exercises. More noticeably, due to the portable and lightweight characteristics, the rehabilitation may be executed in the community by the proposed exoskeleton robot system.
In the future, the robot architectures will be further improved, e.g., the antagonistic PMAs used at joints to increase the ROMs of arms.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}