Pneumatically Actuated Thin Glass Microlens for On-Chip Multi-Magnification Observations



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
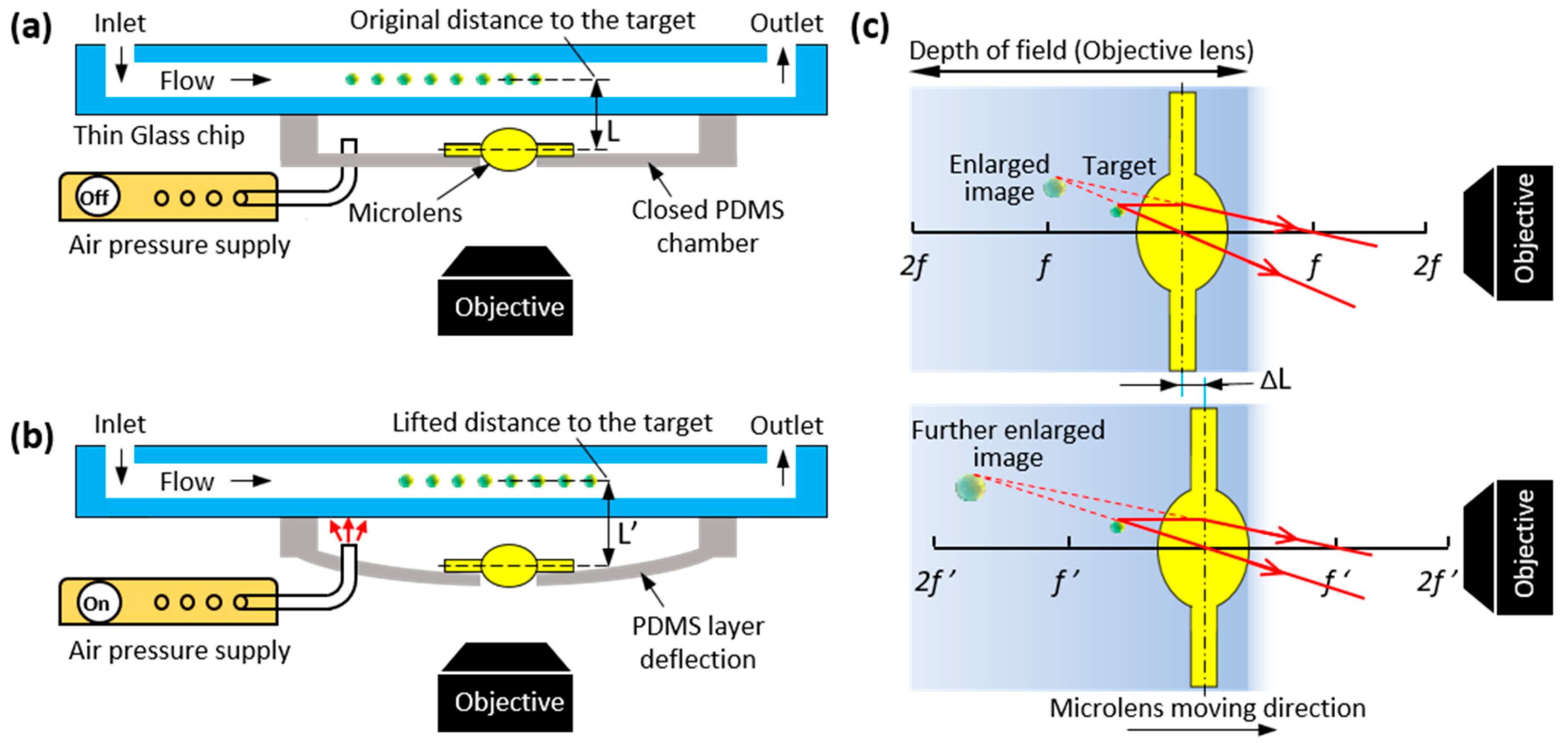
2.1. The Adjustable Magnification Optical System
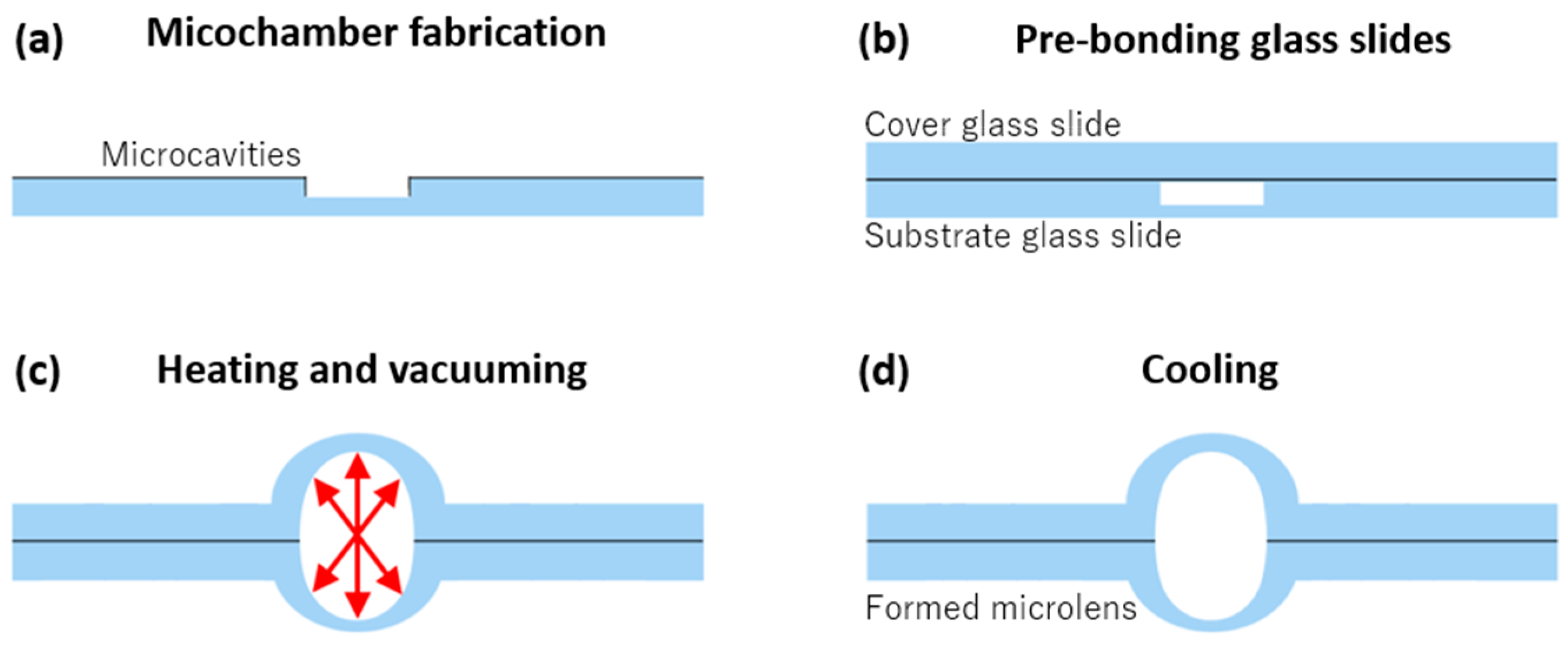
2.2. Thin Glass Microlens Preparation
2.3. The PDMS Layer Thickness Verification
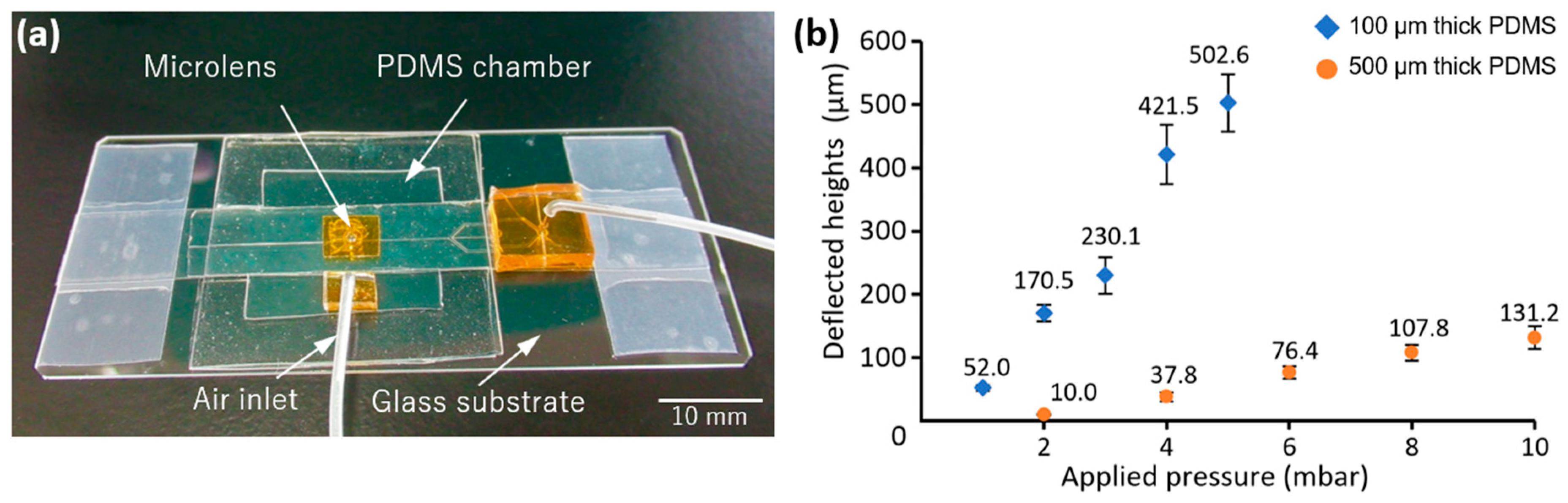
2.4. The PDMS Chamber Inflation Investigation
3. Results and Verification
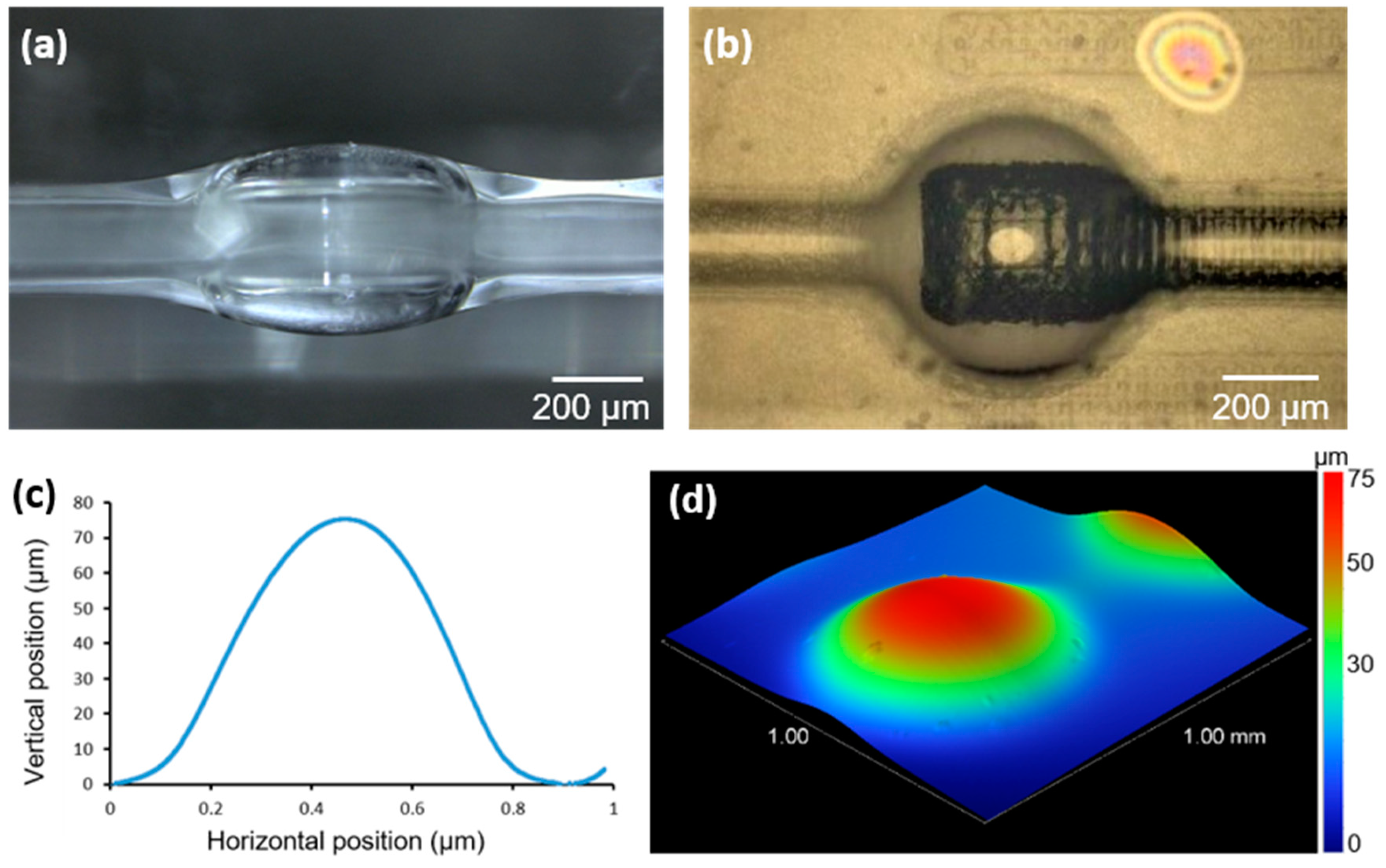
3.1. Morphological and Optical Evaluations of the Thin Glass Microlens
3.2. Closed PDMS Chamber Inflation Characterization
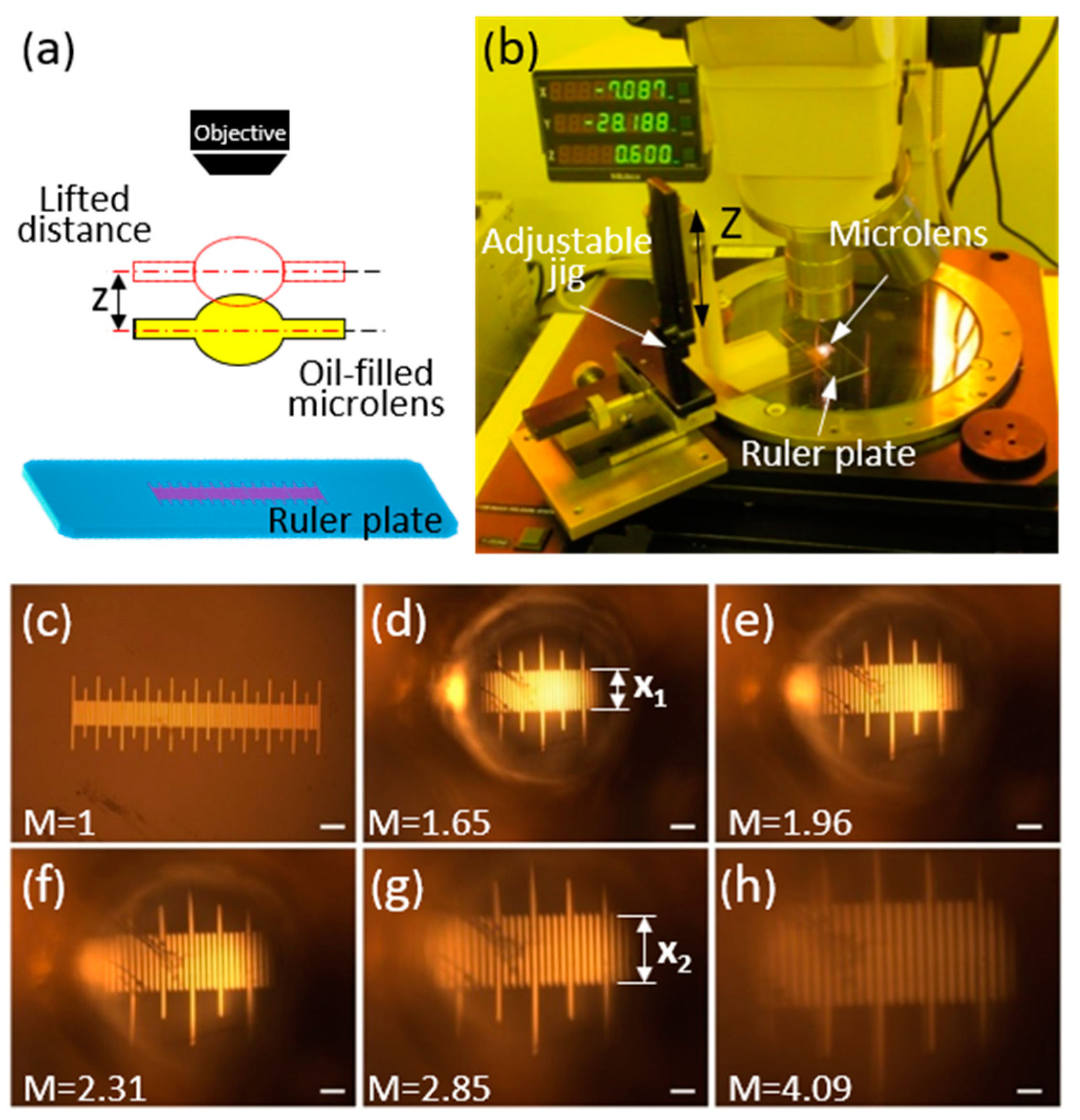
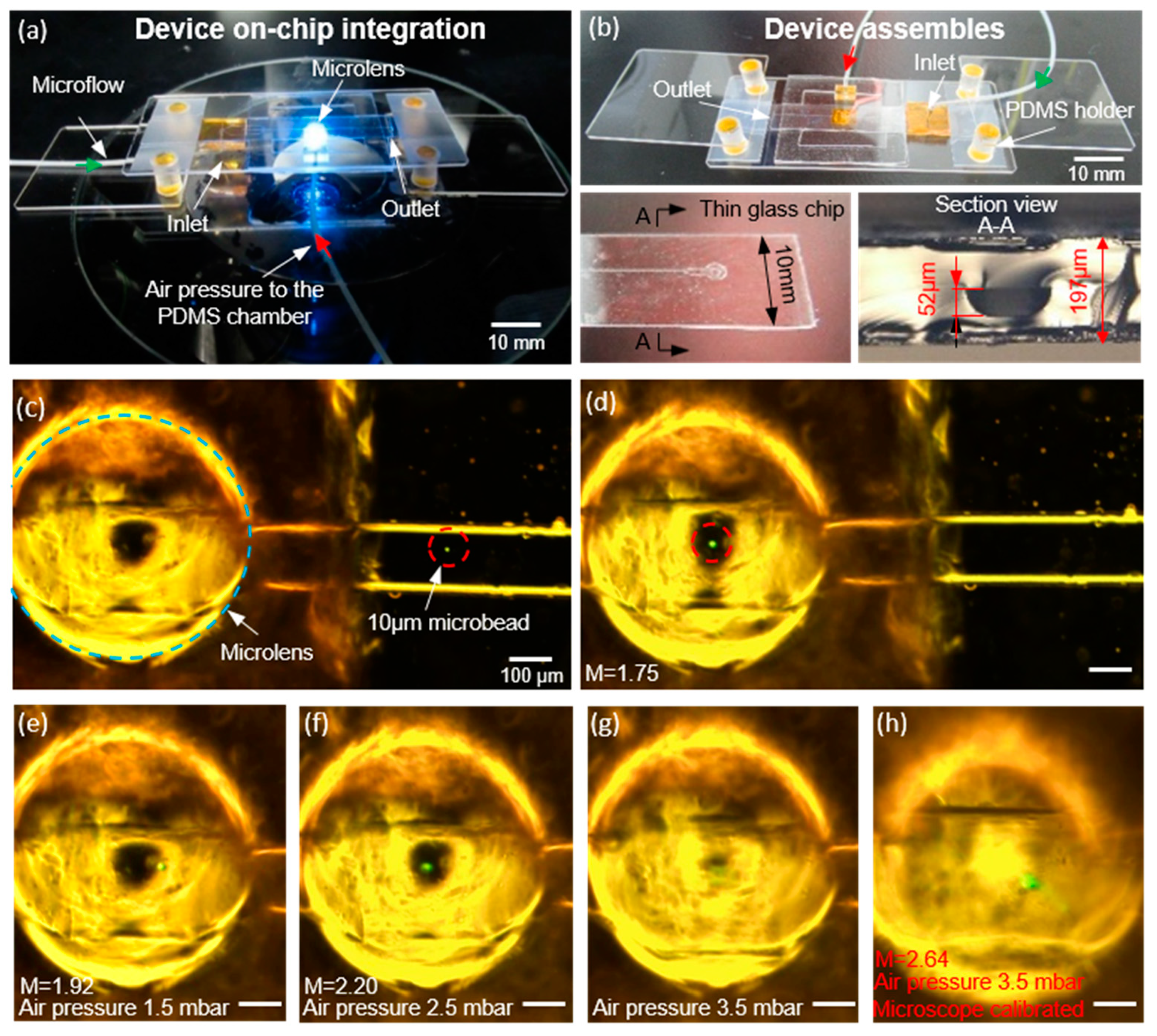
3.3. Demonstration of the On-Chip Optical System Performance at Various Magnifications
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, W.; Zou, Y.; Lin, T.; Chau, F.S.; Zhou, G. Development of Miniature Camera Module Integrated with Solid Tunable Lens Driven by MEMS-Thermal Actuator. J. Microelectromech. Syst. 2017, 26, 84–94. [Google Scholar] [CrossRef]
- Kuiper, S.; Hendriks, B.H.W. Variable-focus liquid lens for miniature cameras. Appl. Phys. Lett. 2004. [Google Scholar] [CrossRef]
- Bagramyan, A.; Galstian, T.; Saghatelyan, A. Motion-free endoscopic system for brain imaging at variable focal depth using liquid crystal lenses. J. Biophotonics 2017. [Google Scholar] [CrossRef] [PubMed]
- Kim, T.; Bin, M.Z.; Shin, R.; Kim, D.; Choi, W.; Park, C.; Kang, S. Replication of high refractive index glass microlens array by imprinting in conjunction with laser assisted rapid surface heating for high resolution confocal microscopy imaging. Opt. Express 2019. [Google Scholar] [CrossRef] [PubMed]
- Schwertz, K. An Introduction to the Optics Manufacturing Process. OptoMechanics (OPTI 521) Report. 2008. [Google Scholar]
- Liu, H.; Chen, F.; Wang, X.; Yang, Q.; Zhang, D.; Si, J.; Hou, X. Photoetching of spherical microlenses on glasses using a femtosecond laser. Opt. Commun. 2009. [Google Scholar] [CrossRef]
- Razpet, N.; Susman, K.; Čepič, M. Experimental demonstration of longitudinal magnification. Phys. Educ. 2009. [Google Scholar] [CrossRef]
- Ren, H.; Wu, S.-T. Tunable-focus liquid microlens array using dielectrophoretic effect. Opt. Express 2008, 16, 2646. [Google Scholar] [CrossRef]
- Huang, X.; Cheng, C.M.; Wang, L.; Wang, B.; Su, C.C.; Ho, M.S.; LeDuc, P.R.; Lin, Q. Thermally tunable polymer microlenses. Appl. Phys. Lett. 2008, 92, 251904. [Google Scholar] [CrossRef]
- Krupenkin, T.; Yang, S.; Mach, P. Tunable liquid microlens. Appl. Phys. Lett. 2003, 82, 316–318. [Google Scholar] [CrossRef]
- Zou, Y.; Chau, F.S.; Zhou, G. Miniature solid tunable lenses and their applications: A review. Sens. Mater. 2017, 29, 323–334. [Google Scholar] [CrossRef][Green Version]
- Ji, S.; Yin, K.; Mackey, M.; Brister, A.; Ponting, M.; Baer, E. Polymeric nanolayered gradient refractive index lenses: Technology review and introduction of spherical gradient refractive index ball lenses. Opt. Eng. 2013. [Google Scholar] [CrossRef]
- Zeng, X.; Jiang, H. Liquid tunable microlenses based on MEMS techniques. J. Phys. D Appl. Phys. 2013, 46. [Google Scholar] [CrossRef] [PubMed]
- Farghaly, M.A.; Hanke, U.; Akram, M.N.; Halvorsen, E. Trial functions for reduced-order models of piezoelectrically actuated microelectromechanical systems tunable lenses. Opt. Eng. 2018, 57, 1. [Google Scholar] [CrossRef]
- Li, L.; Wang, J.-H.; Wang, Q.-H.; Wu, S.-T. Displaceable and focus-tunable electrowetting optofluidic lens. Opt. Express 2018, 26, 25839. [Google Scholar] [CrossRef]
- Lee, S.W.; Lee, S.S. Focal tunable liquid lens integrated with an electromagnetic actuator. Appl. Phys. Lett. 2007. [Google Scholar] [CrossRef]
- Ashtiani, A.O.; Jiang, H. Tunable microlens actuated via a thermoelectrically driven liquid heat engine. J. Appl. Phys. 2014, 115. [Google Scholar] [CrossRef]
- Sarrazin, F.; Salmon, J.B.; Talaga, D.; Servant, L. Chemical reaction imaging within microfluidic devices using confocal raman spectroscopy: The case of water and deuterium oxide as a model system. Anal. Chem. 2008. [Google Scholar] [CrossRef]
- Lei, K.F.; Lee, K.F.; Lee, M.Y. Development of a flexible PDMS capacitive pressure sensor for plantar pressure measurement. Microelectron. Eng. 2012, 99, 1–5. [Google Scholar] [CrossRef]
- Tanaka, Y.; Noguchi, Y.; Yalikun, Y.; Kamamichi, N. Earthworm muscle driven bio-micropump. Sens. Actuators B Chem. 2017, 242, 1186–1192. [Google Scholar] [CrossRef]
- Yalikun, Y.; Hosokawa, Y.; Iino, T.; Tanaka, Y. An all-glass 12 μm ultra-thin and flexible micro-fluidic chip fabricated by femtosecond laser processing. Lab Chip 2016, 16, 2427–2433. [Google Scholar] [CrossRef] [PubMed]
- Tanaka, Y. Electric actuating valves incorporated into an all glass-based microchip exploiting the flexibility of ultra thin glass. RSC Adv. 2013, 3, 10213–10220. [Google Scholar] [CrossRef]
- Tanaka, Y. A Peristaltic Pump Integrated on a 100% Glass Microchip Using Computer Controlled Piezoelectric Actuators. Micromachines 2014, 5, 289–299. [Google Scholar] [CrossRef]
- Yalikun, Y.; Tanaka, Y. Large-Scale Integration of All-Glass Valves on a Microfluidic Device. Micromachines 2016, 7, 83. [Google Scholar] [CrossRef]
- Ottevaere, H.; Cox, R.; Herzig, H.P.; Miyashita, T.; Naessens, K.; Taghizadeh, M.; Völkel, R.; Woo, H.J.; Thienpont, H. Comparing Glass and Plastic Refractive Microlenses Fabricated with Different Technologies; IOP Publishing Ltd.: Bristol, UK, 2006. [Google Scholar]
- Aishan, Y.; Yalikun, Y.; Amaya, S.; Shen, Y.; Tanaka, Y. Thin glass micro-dome structure based microlens fabricated by accurate thermal expansion of microcavities. Appl. Phys. Lett. 2019. [Google Scholar] [CrossRef]
- Aishan, Y.; Yalikun, Y.; Funano, S.I.; Shen, Y.; Tanaka, Y. Accurate rotation of ultra-Thin glass chamber for single-cell multidirectional observation. Appl. Phys. Express 2020. [Google Scholar] [CrossRef]
- Ens, J.; Lawrence, P. An Investigation of Methods for Determining Depth from Focus. IEEE Trans. Pattern Anal. Mach. Intell. 1993. [Google Scholar] [CrossRef]
- Svedin, N.; Kälvesten, E.; Stemme, E.; Stemme, G. A new silicon gas-flow sensor based on lift force. J. Microelectromech. Syst. 1998, 7, 303–308. [Google Scholar] [CrossRef]
- Czaplewski, D.A.; Ilic, B.R.; Zalalutdinov, M.; Olbricht, W.L.; Zehnder, A.T.; Craighead, H.G.; Michalske, T.A. A micromechanical flow sensor for microfluidic applications. J. Microelectromech. Syst. 2004, 13, 576–585. [Google Scholar] [CrossRef]
- Mishra, R.; Grange, W.; Hegner, M. Rapid and Reliable Calibration of Laser Beam Deflection System for Microcantilever-Based Sensor Setups. J. Sens. 2012, 2012, 1–6. [Google Scholar] [CrossRef]
- Merlo, S.; Crisà, E.; Giusti, D.; Ferrera, M.; Soldo, M. Characterization of tunable micro-lenses with a versatile optical measuring system. Sensors 2018, 18, 4396. [Google Scholar] [CrossRef] [PubMed]
- Chronis, N.; Liu, G.; Jeong, K.-H.; Lee, L. Tunable liquid-filled microlens array integrated with microfluidic network. Opt. Express 2003, 11, 2370. [Google Scholar] [CrossRef]
- Dong, L.; Agarwal, A.K.; Beebe, D.J.; Jiang, H. Adaptive liquid microlenses activated by stimuli-responsive hydrogels. Nature 2006, 442, 551–554. [Google Scholar] [CrossRef] [PubMed]
- Hoelzle, D.J.; Chan, C.K.; Scott, M.B.; Lake, M.A.; Rowat, A.C. A large displacement, high frequency, underwater microelectromechanical systems actuator. J. Appl. Phys. 2015. [Google Scholar] [CrossRef]
- Gill, J.J.; Ho, K.; Carman, G.P. Three-dimensional thin-film shape memory alloy microactuator with two-way effect. J. Microelectromech. Syst. 2002. [Google Scholar] [CrossRef]
- Zeng, X.; Jiang, H. Tunable liquid microlens actuated by infrared light-responsive hydrogel. Appl. Phys. Lett. 2008, 93, 1–4. [Google Scholar] [CrossRef]
- De Volder, M.; Ceyssens, F.; Reynaerts, D.; Puers, R. Microsized piston-cylinder pneumatic and hydraulic actuators fabricated by lithography. J. Microelectromechanical Syst. 2009. [Google Scholar] [CrossRef]







© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aishan, Y.; Yalikun, Y.; Tanaka, Y. Pneumatically Actuated Thin Glass Microlens for On-Chip Multi-Magnification Observations. Actuators 2020, 9, 73. https://doi.org/10.3390/act9030073
Aishan Y, Yalikun Y, Tanaka Y. Pneumatically Actuated Thin Glass Microlens for On-Chip Multi-Magnification Observations. Actuators. 2020; 9(3):73. https://doi.org/10.3390/act9030073
Chicago/Turabian StyleAishan, Yusufu, Yaxiaer Yalikun, and Yo Tanaka. 2020. "Pneumatically Actuated Thin Glass Microlens for On-Chip Multi-Magnification Observations" Actuators 9, no. 3: 73. https://doi.org/10.3390/act9030073
APA StyleAishan, Y., Yalikun, Y., & Tanaka, Y. (2020). Pneumatically Actuated Thin Glass Microlens for On-Chip Multi-Magnification Observations. Actuators, 9(3), 73. https://doi.org/10.3390/act9030073