
A Miniature Pneumatic Bending Rubber Actuator Controlled by Using the PSO-SVR-Based Motion Estimation Method with the Generalized Gaussian Kernel



Abstract
:1. Introduction
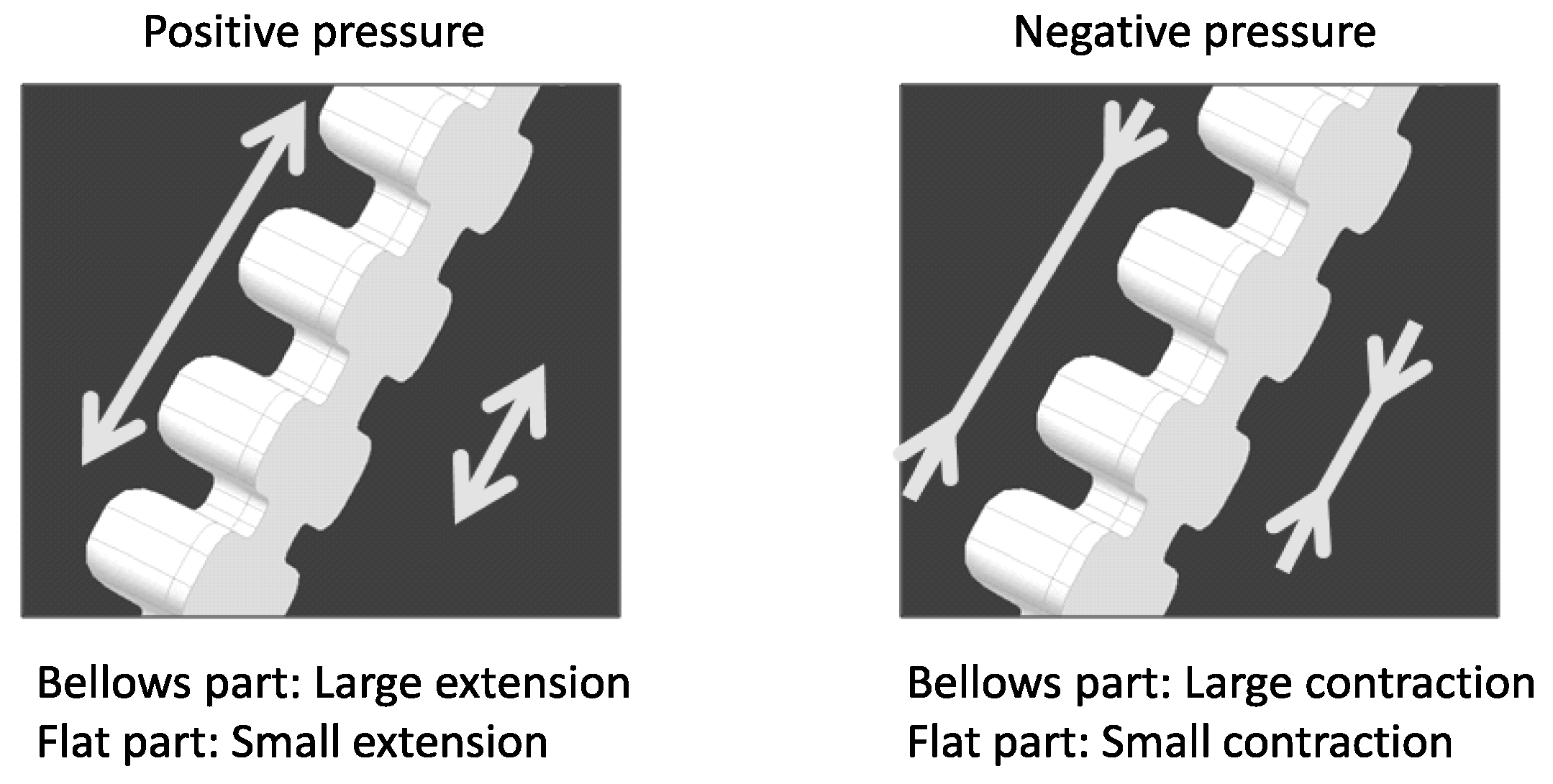
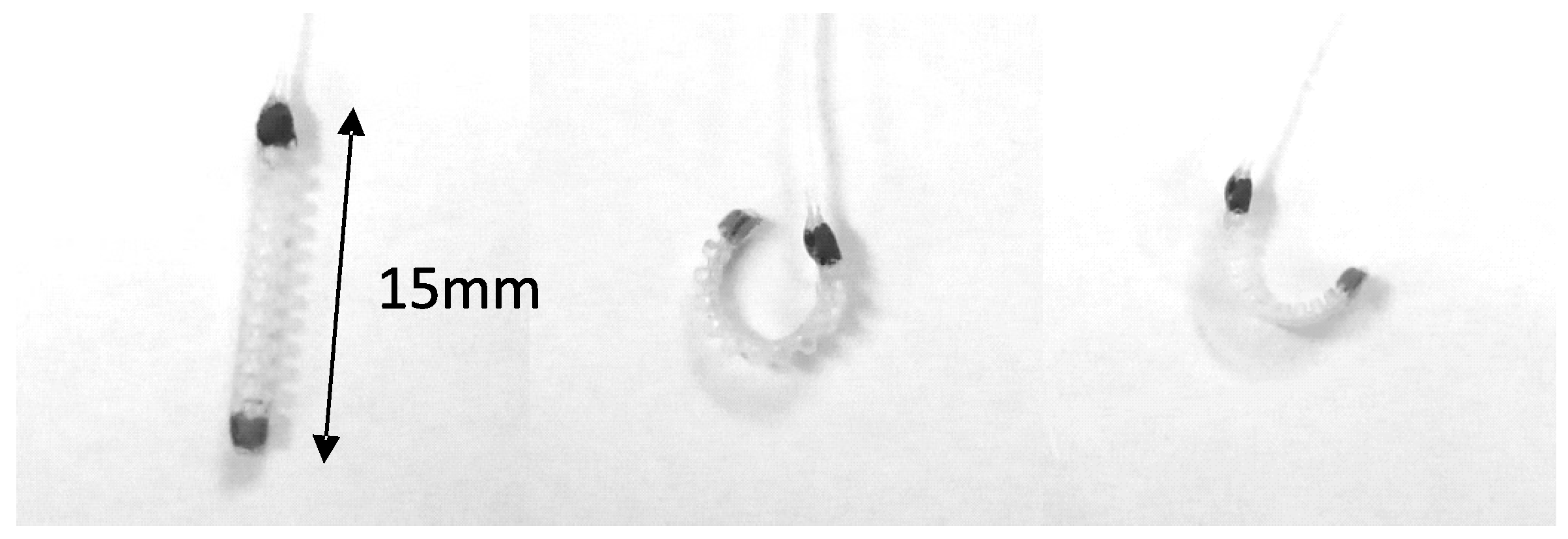
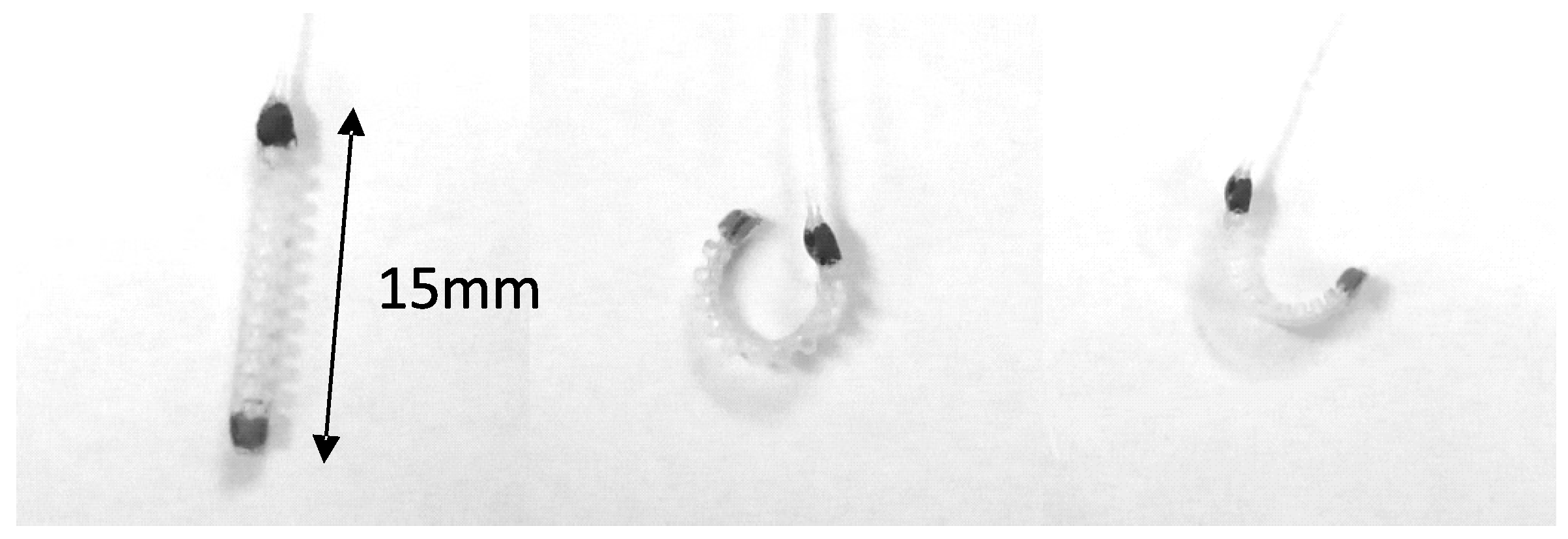
2. Structure of a Miniature Pneumatic Bending Rubber Actuator
3. Mathematical Preliminaries
3.1. Support Vector Regression
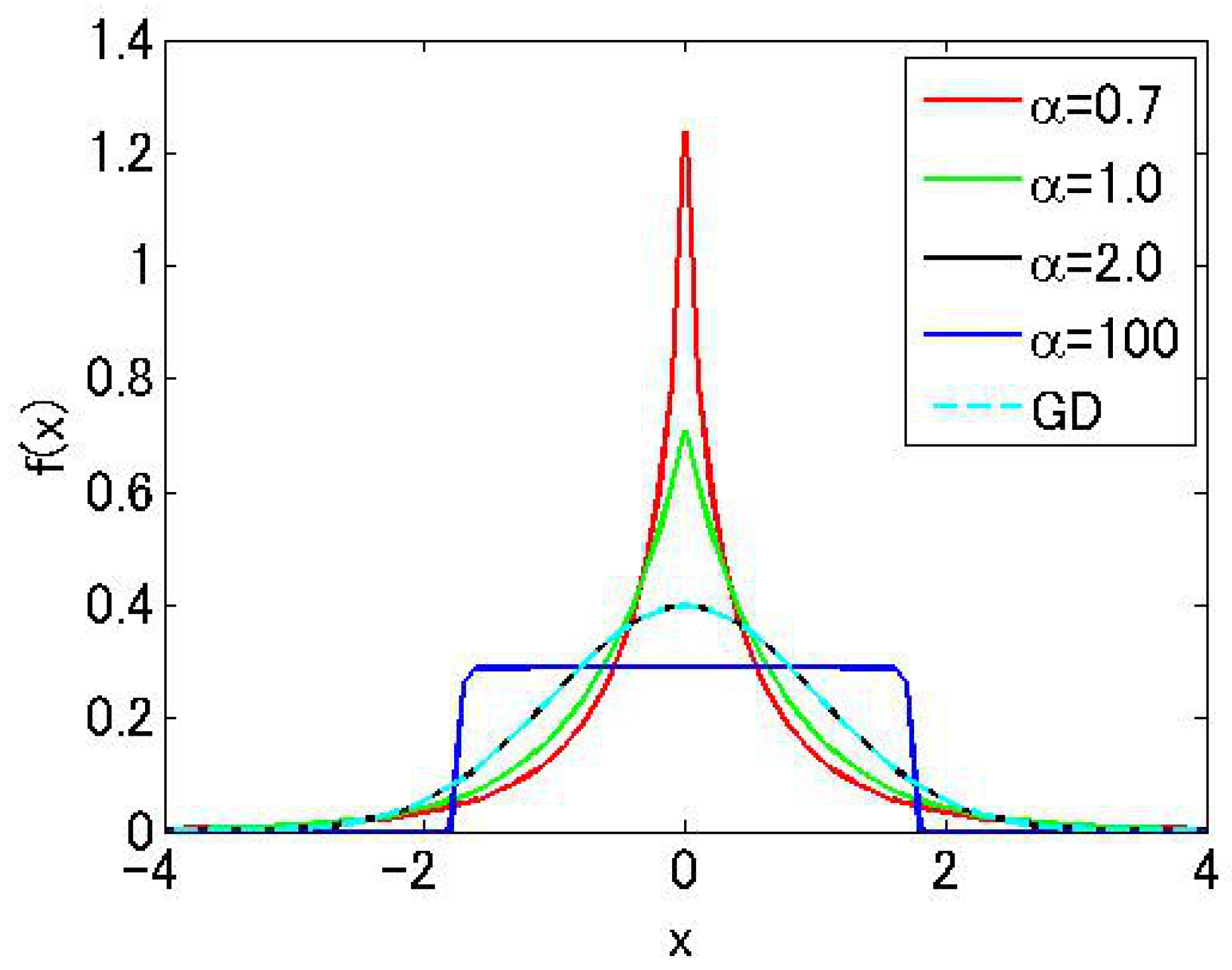
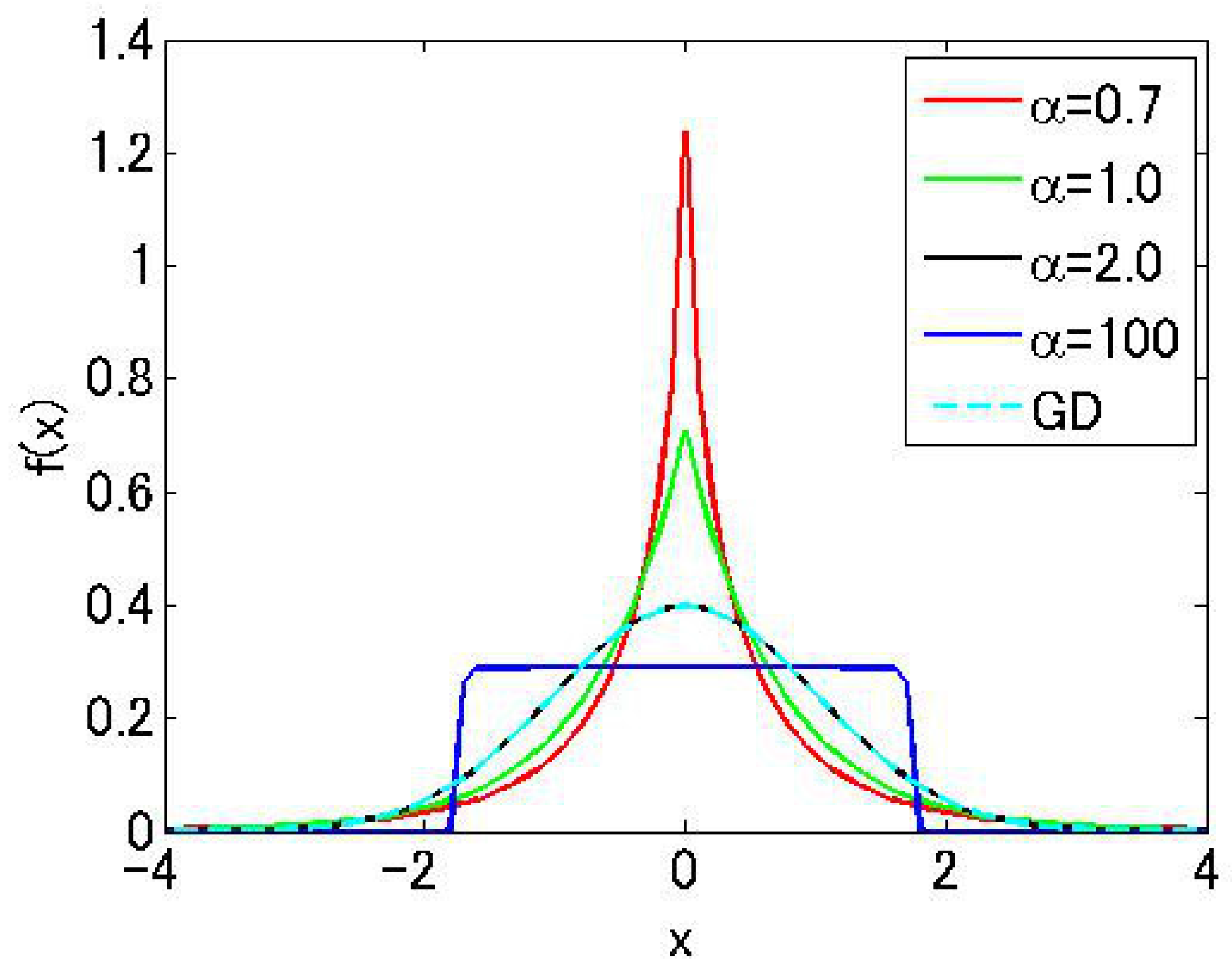
3.2. Generalized Gaussian Distribution
3.3. Particle Swarm Optimization
- Initialize the particle’s position and velocity in the swarm randomly, and set ranges of position and velocity.
- Evaluate positions with the evaluation function.
- Update the particle’s and global best solution.
- Update the particle’s velocity and position.
4. Modeling and Nonlinear Control System
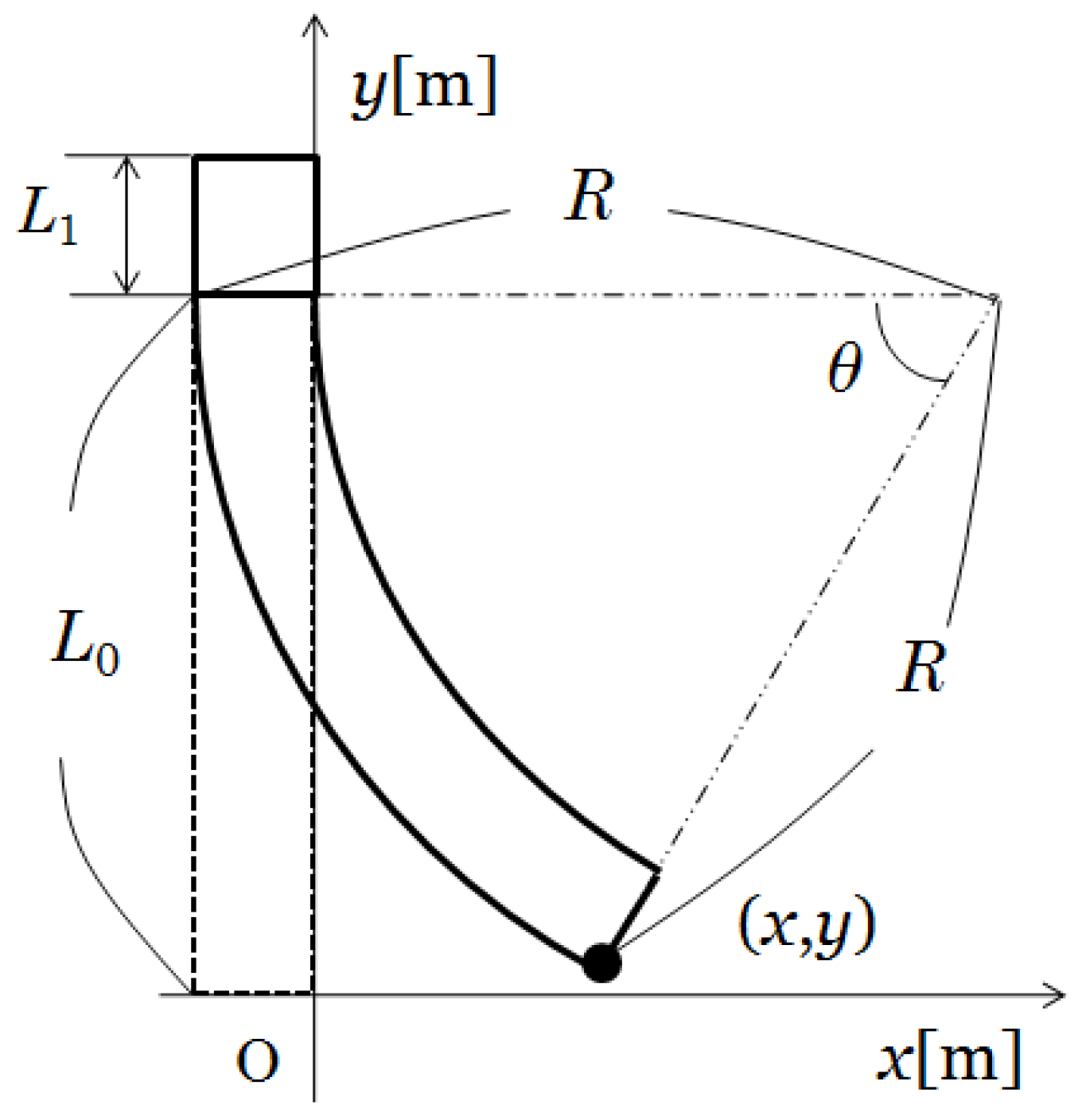
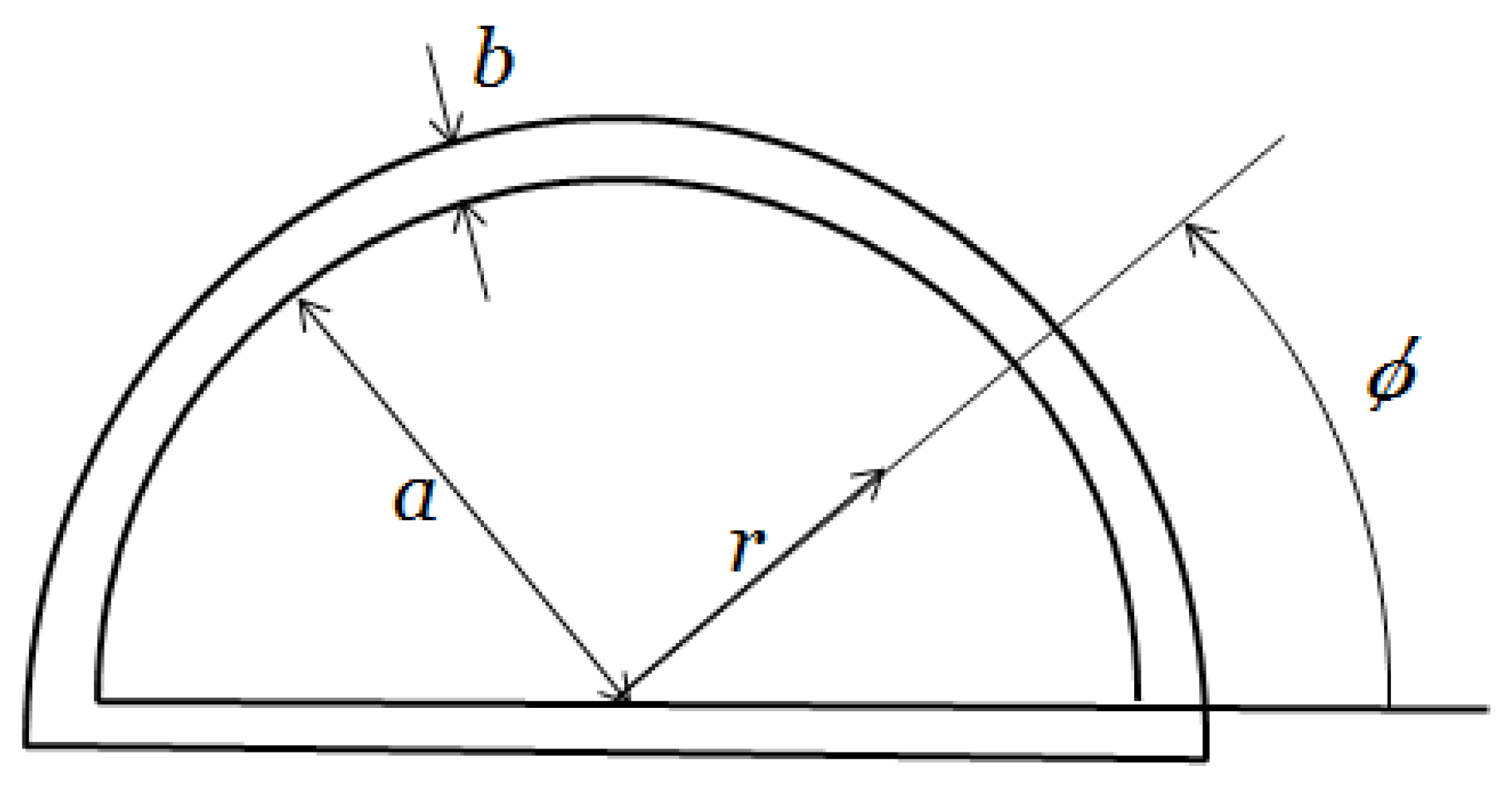
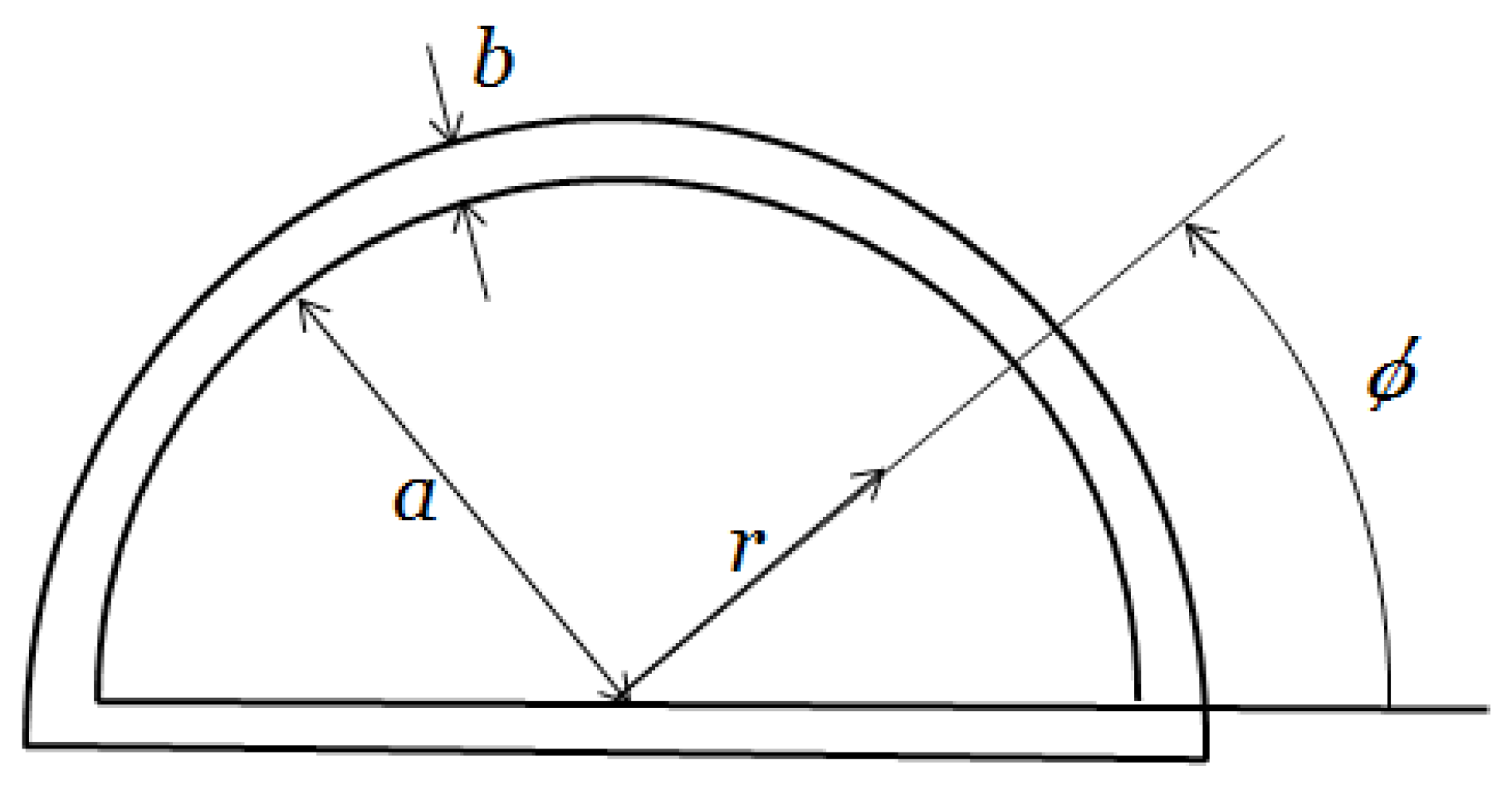
4.1. Modeling
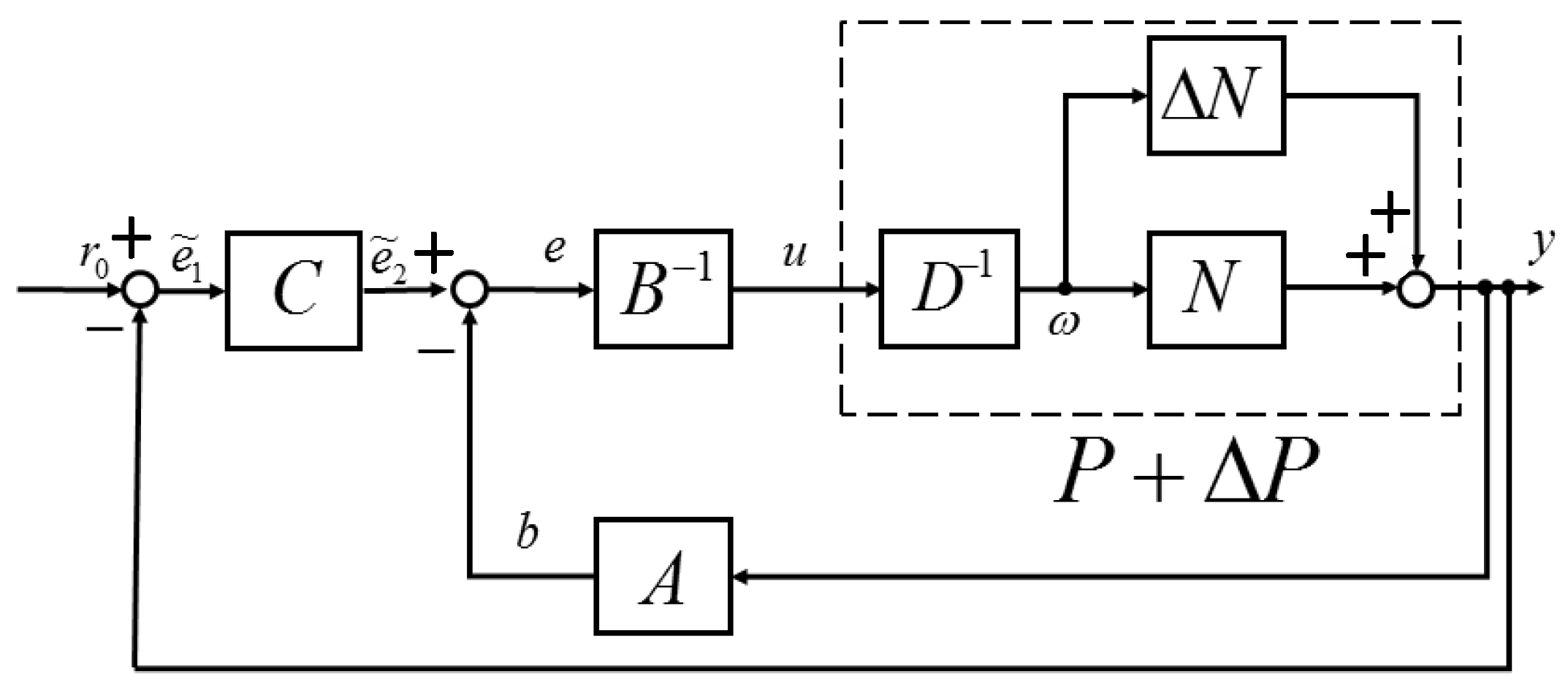
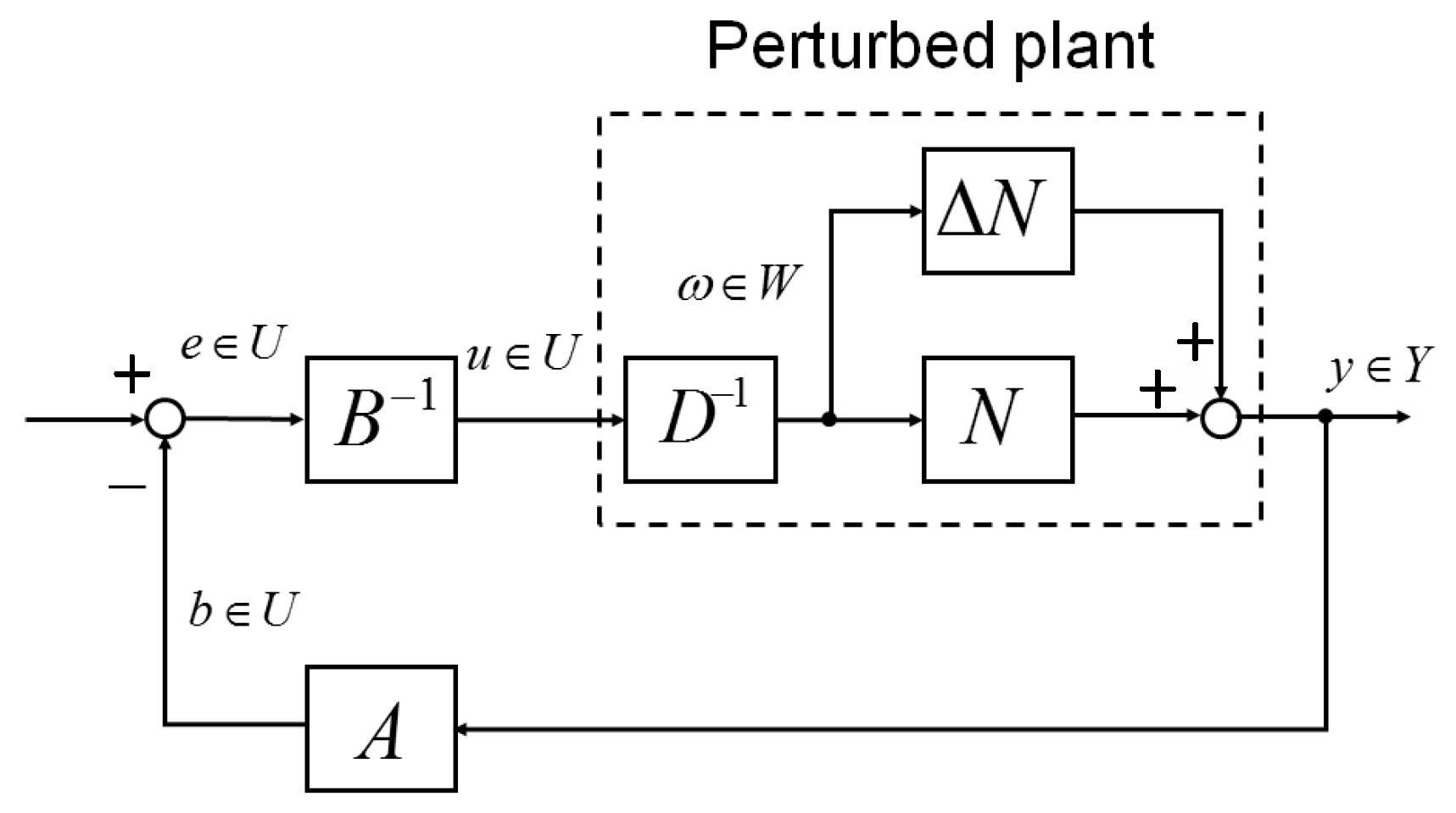
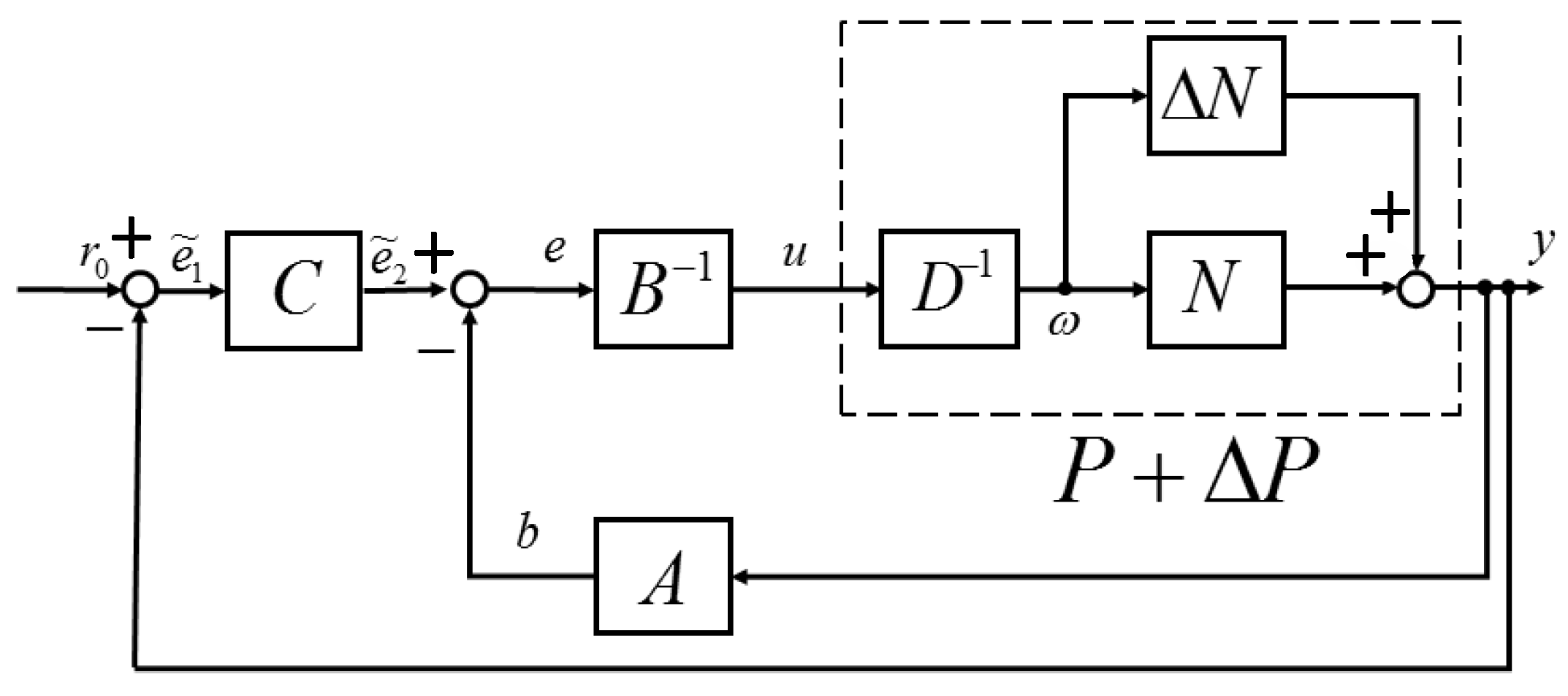
4.2. Design for the Operator-Based Robust Nonlinear Control System
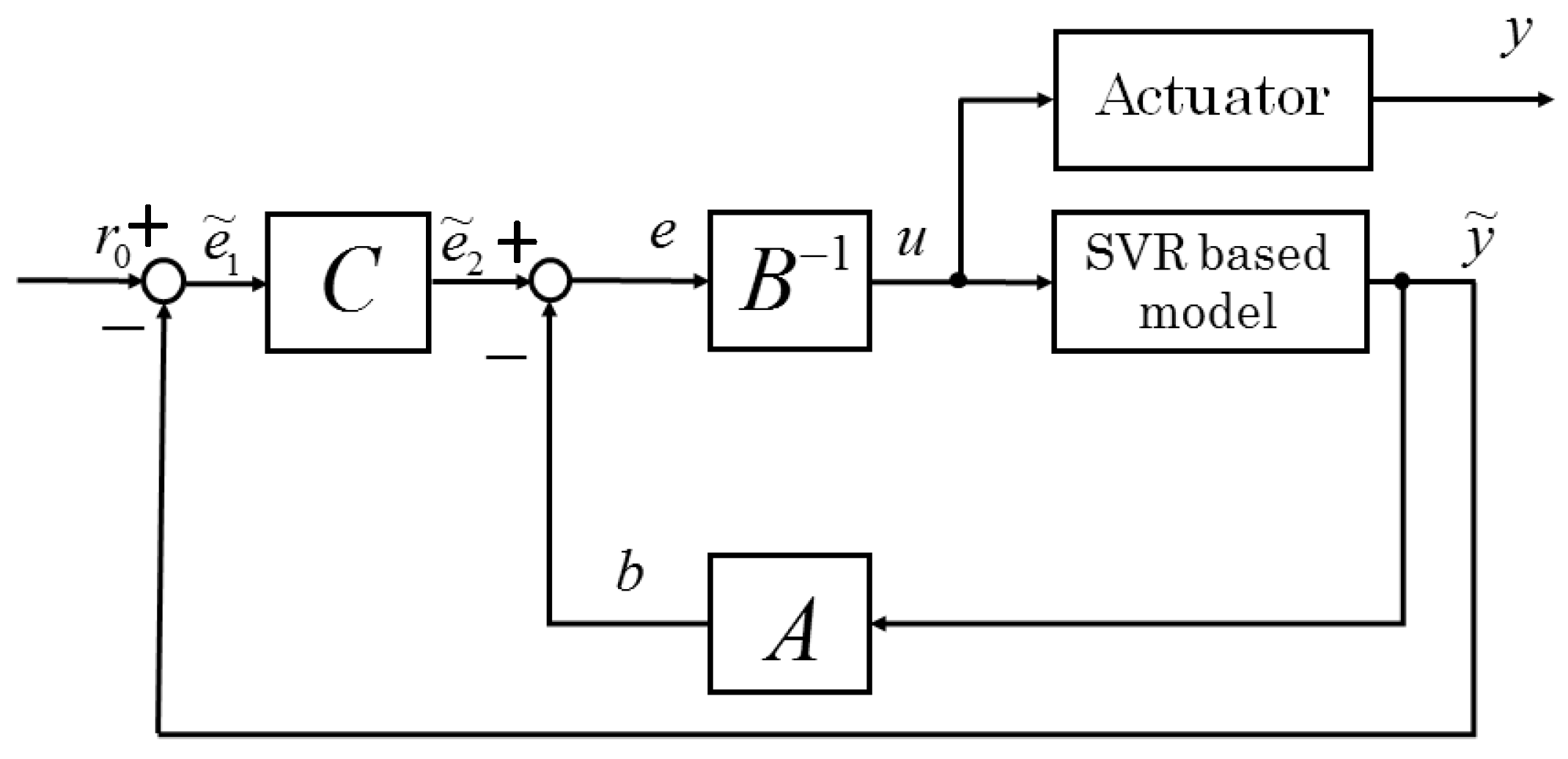
4.3. Tracking Actuator’s Output for the Target Value
5. Proposed Method
- Input training data for SVR with the generalized Gaussian kernel.
- Do many tests and evaluations with various parameters.
- Decide the best parameters.
- Estimate the actuator’s output by SVR with the optimized parameters.
6. Experiment
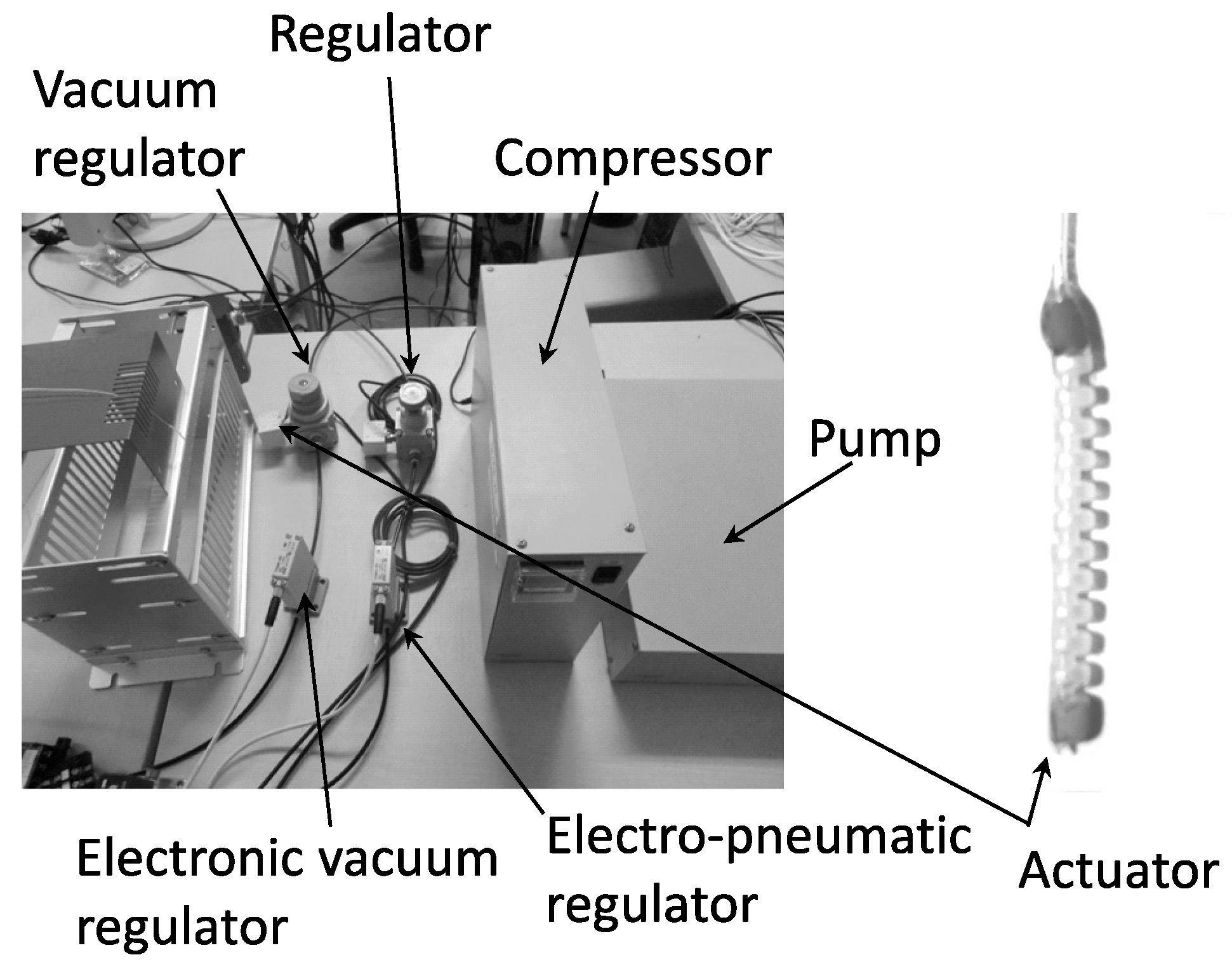
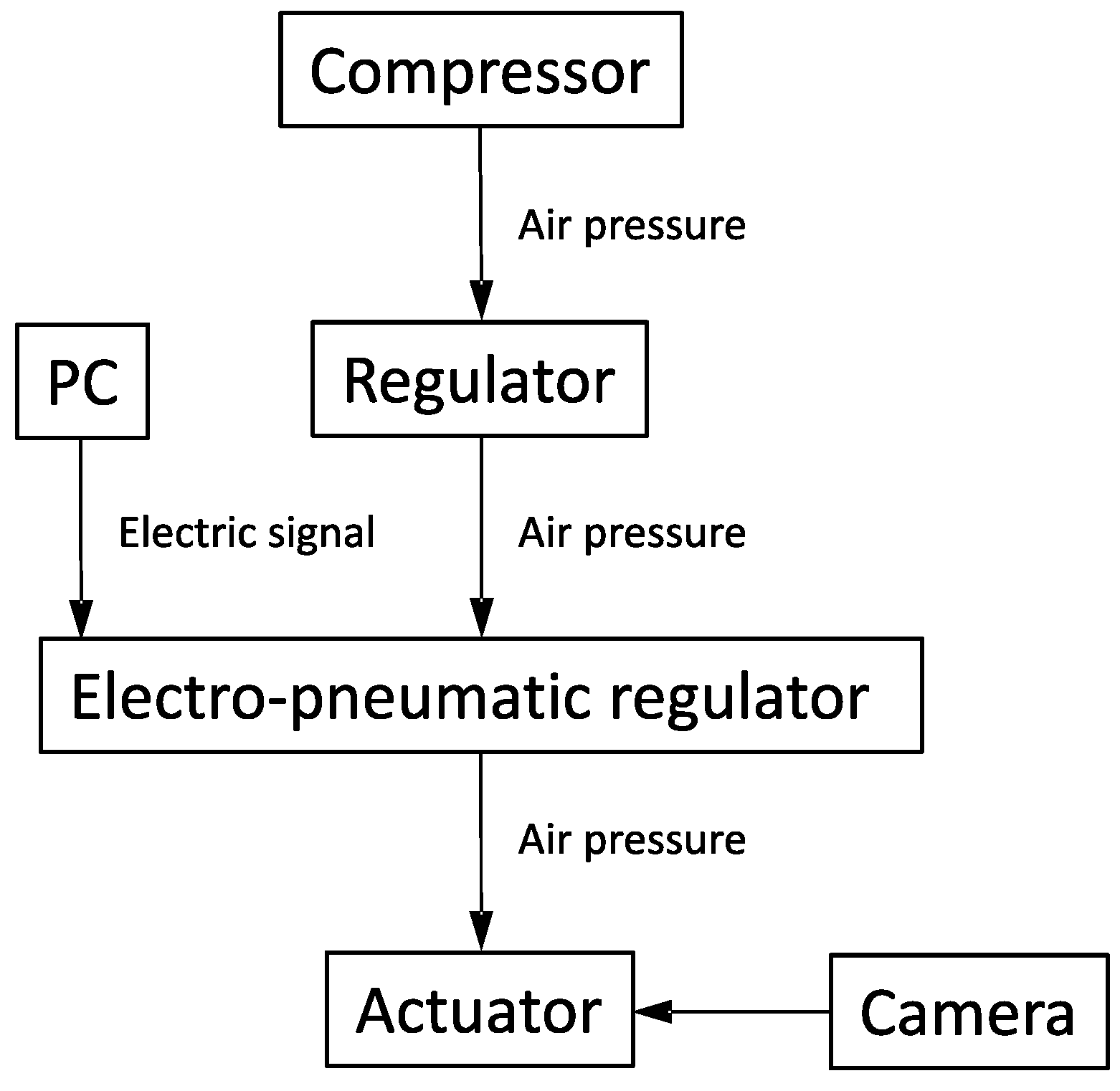
6.1. Experimental System
- Compressed air is made by the air compressor.
- Air pressure is regulated by the regulator to prevent the actuator from breaking.
- Controlled air pressure is made to control the actuator by the electro-pneumatic regulator.
- Air pressure is provided for the actuator, and it moves.
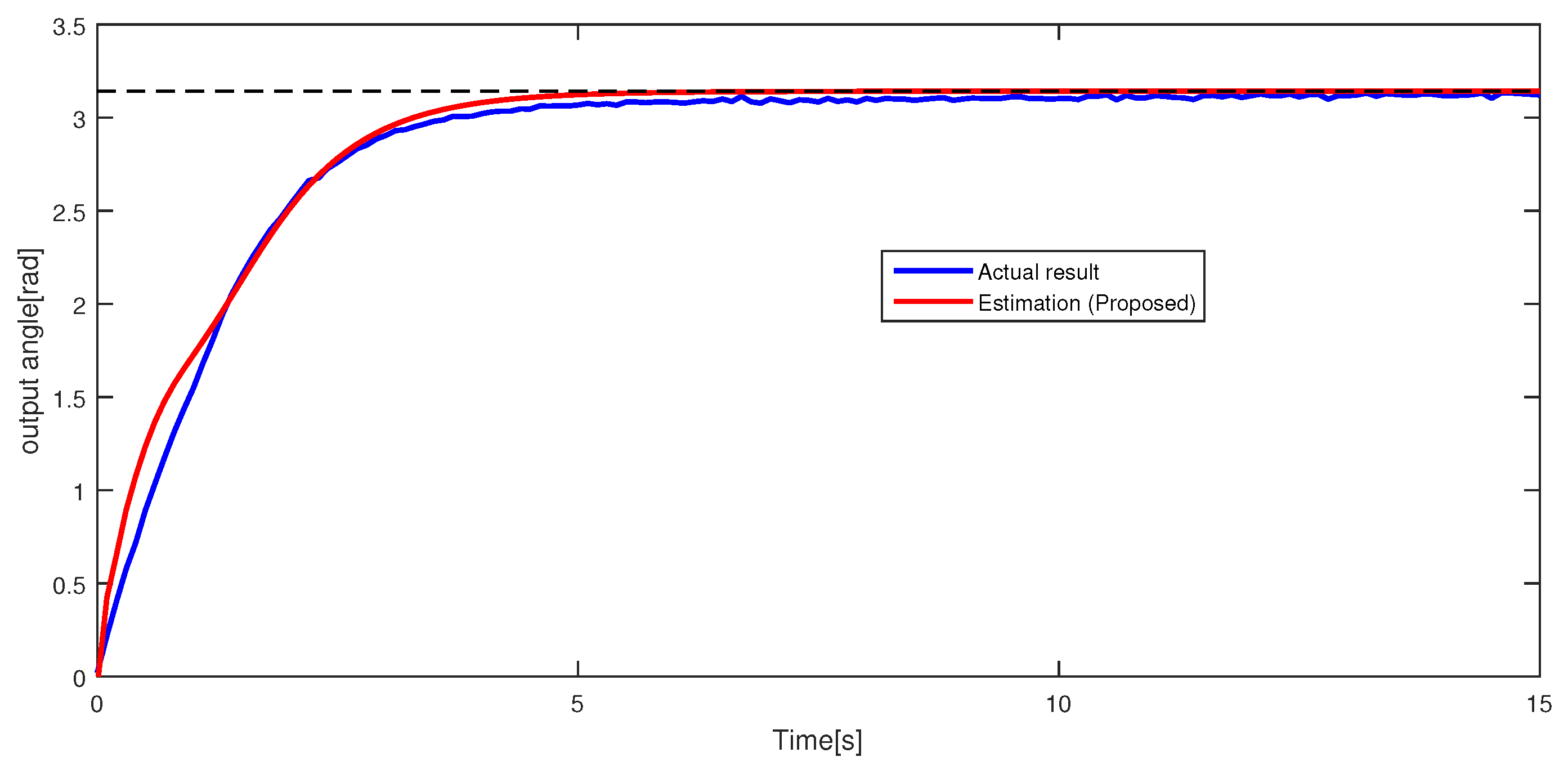
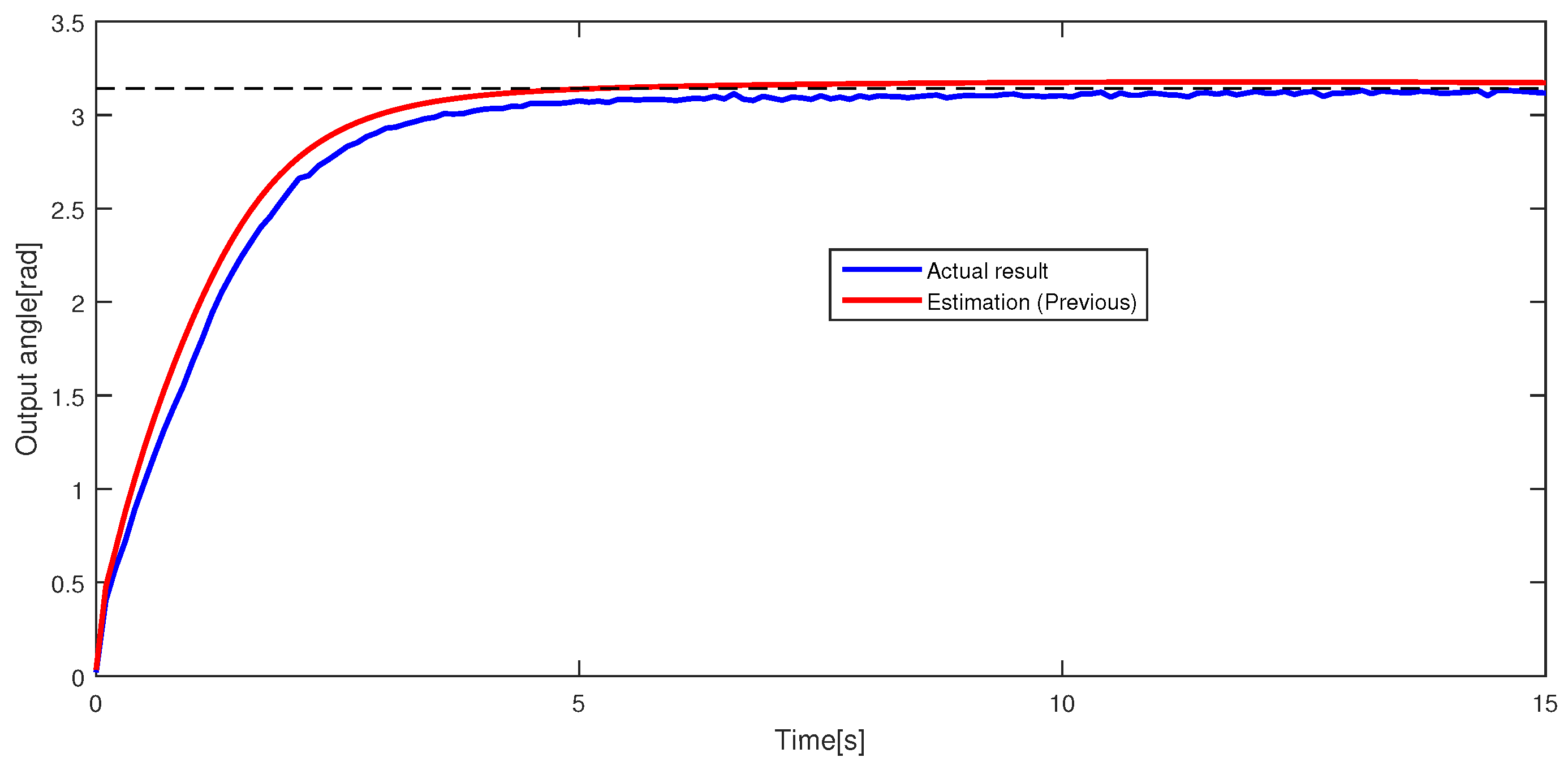
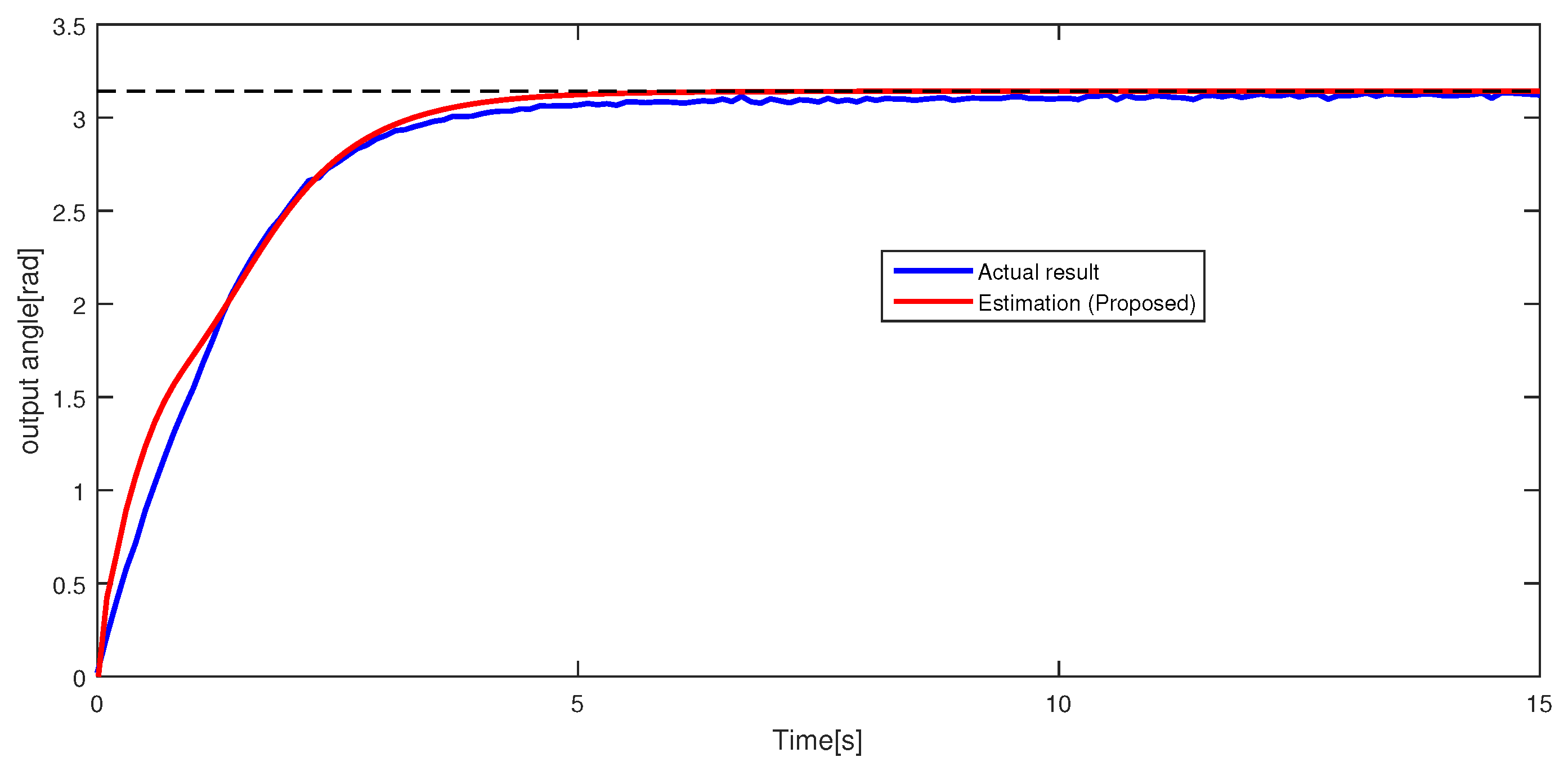
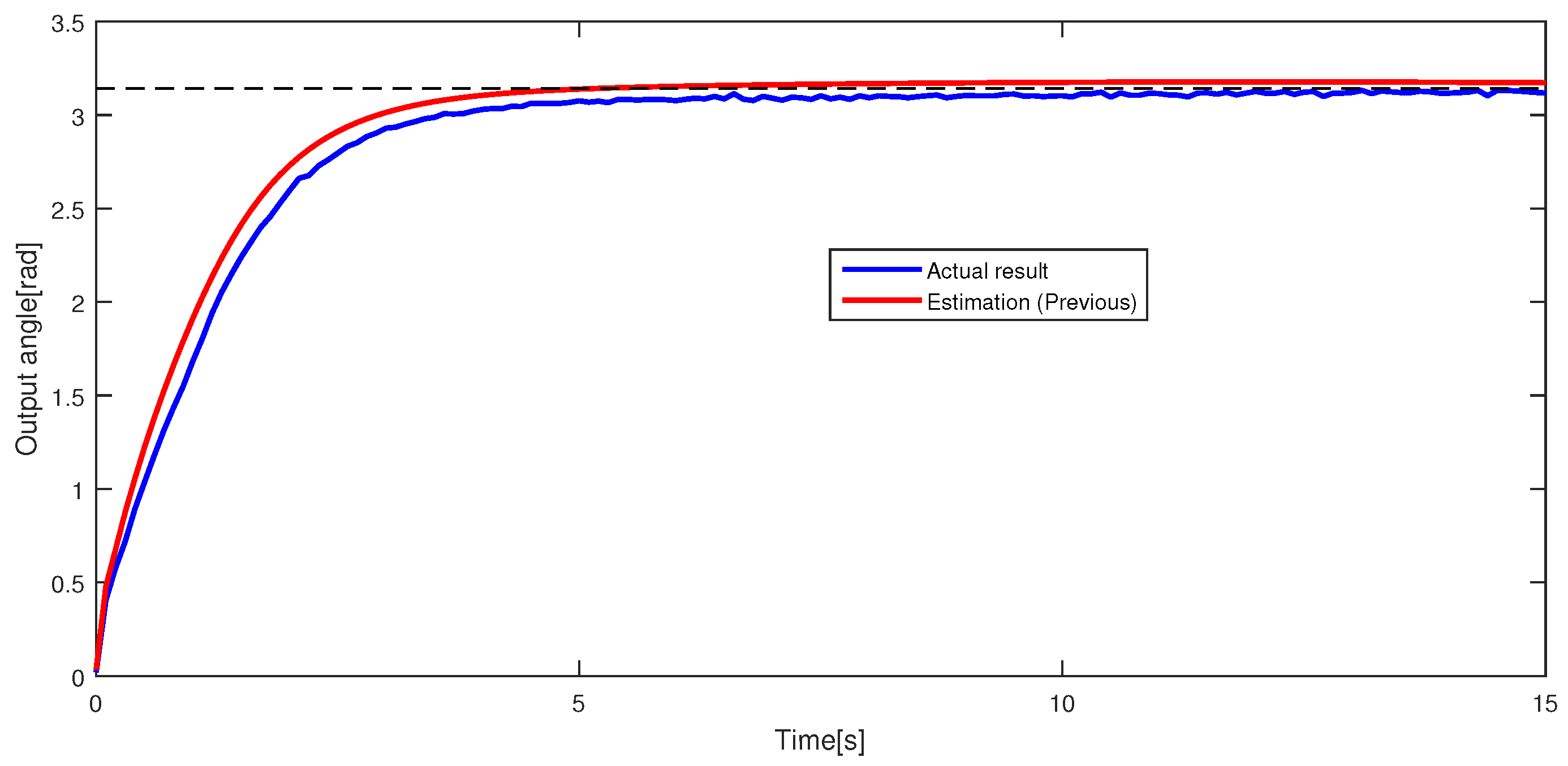
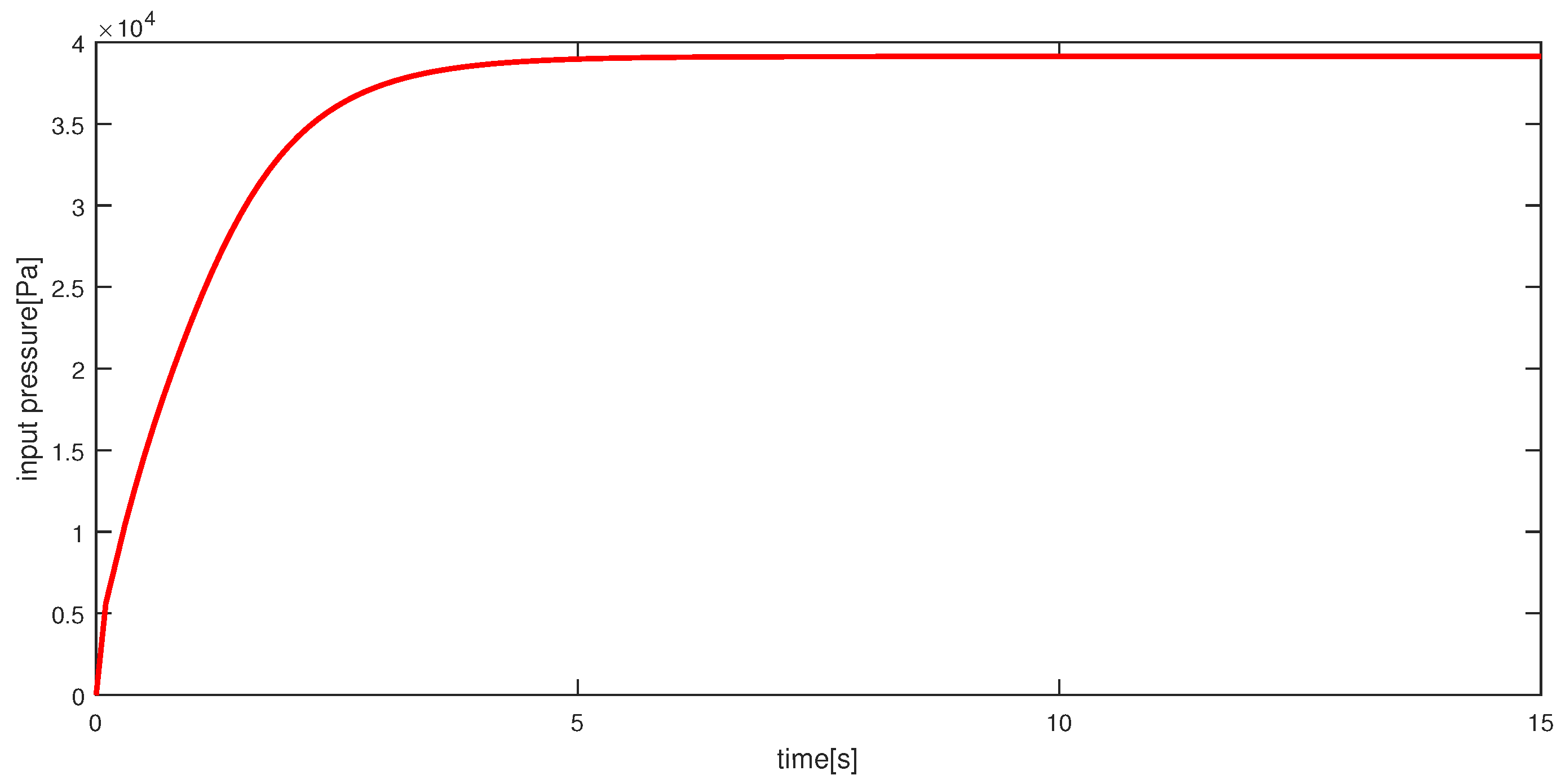
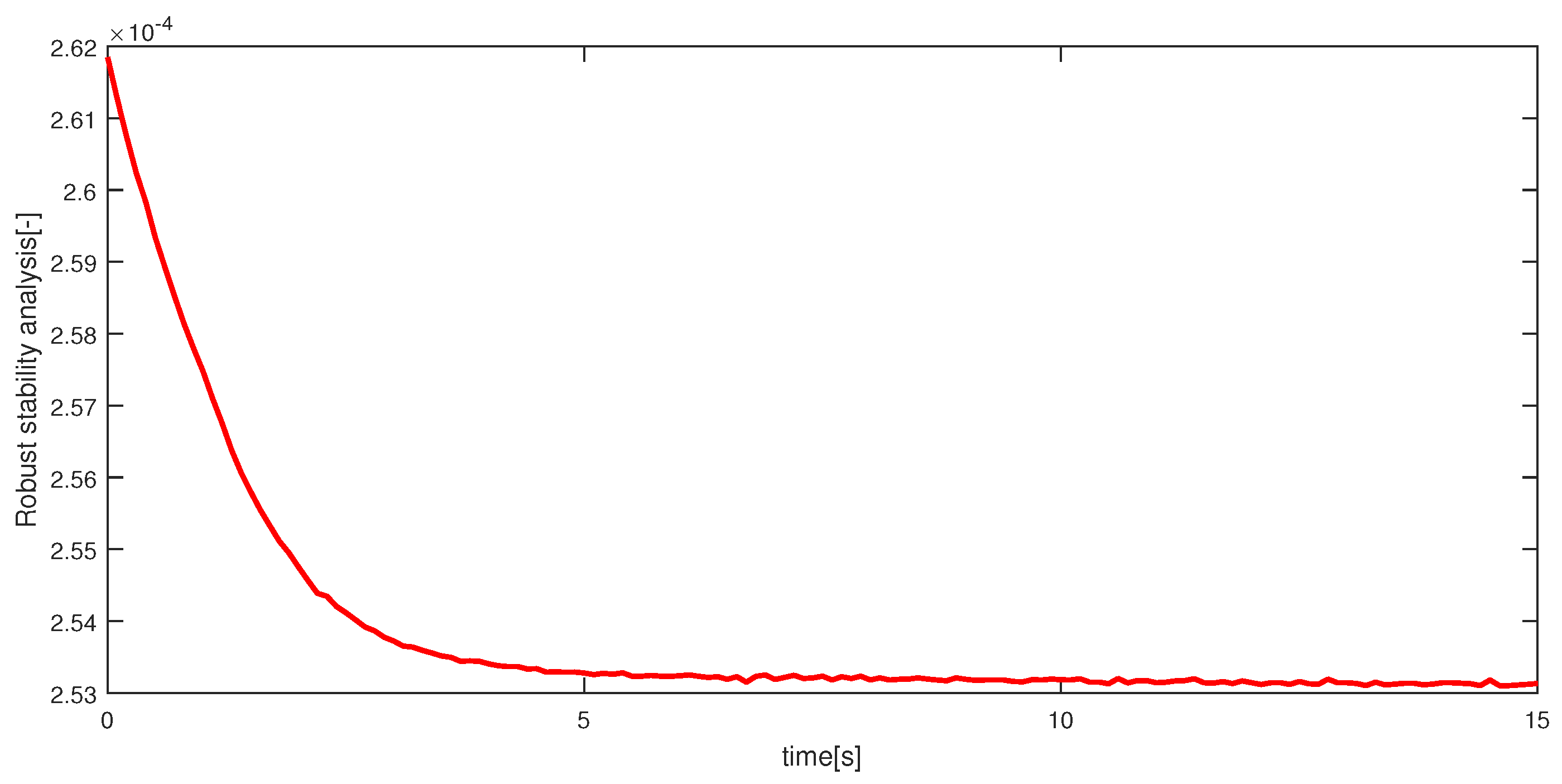
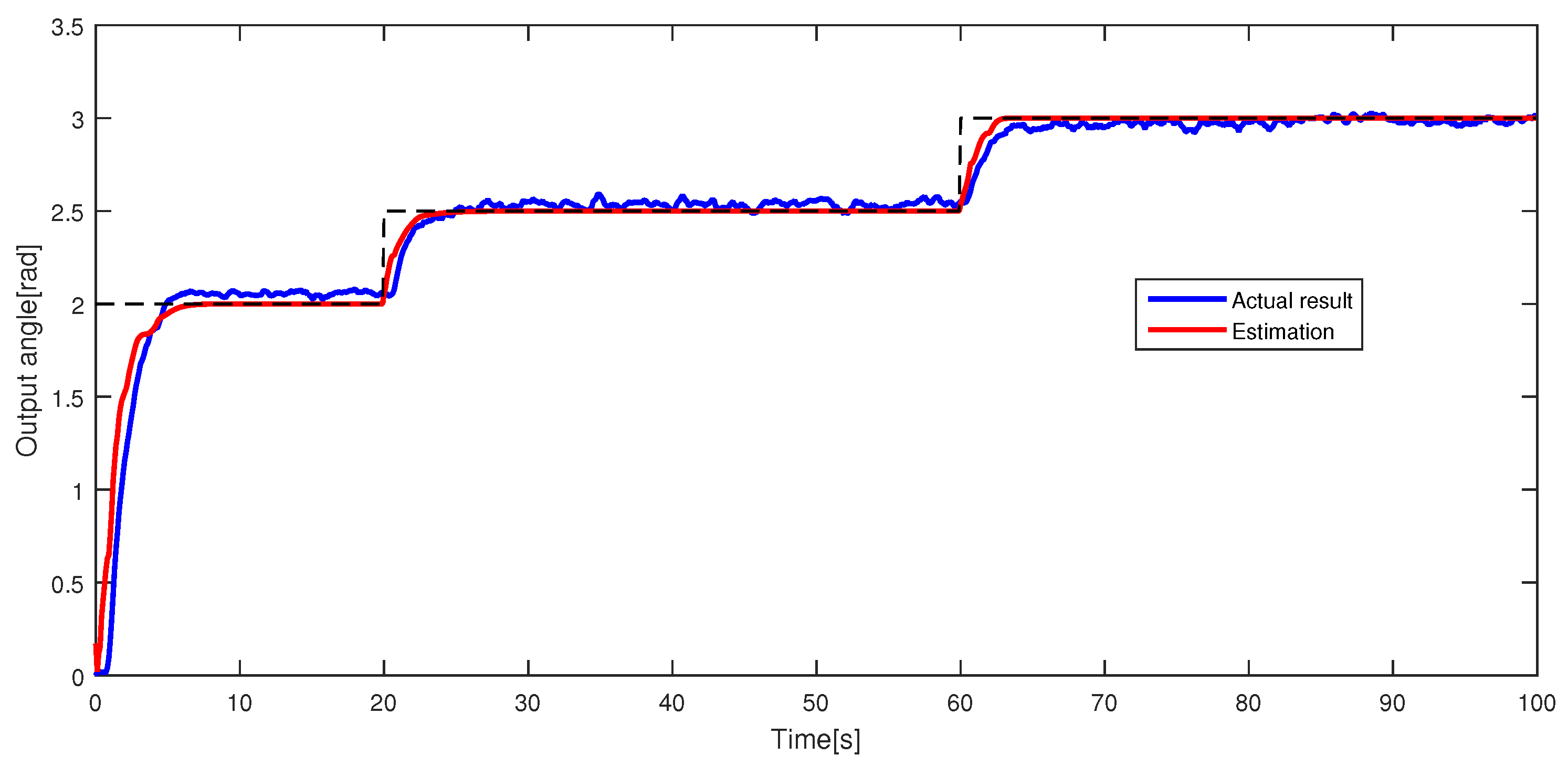
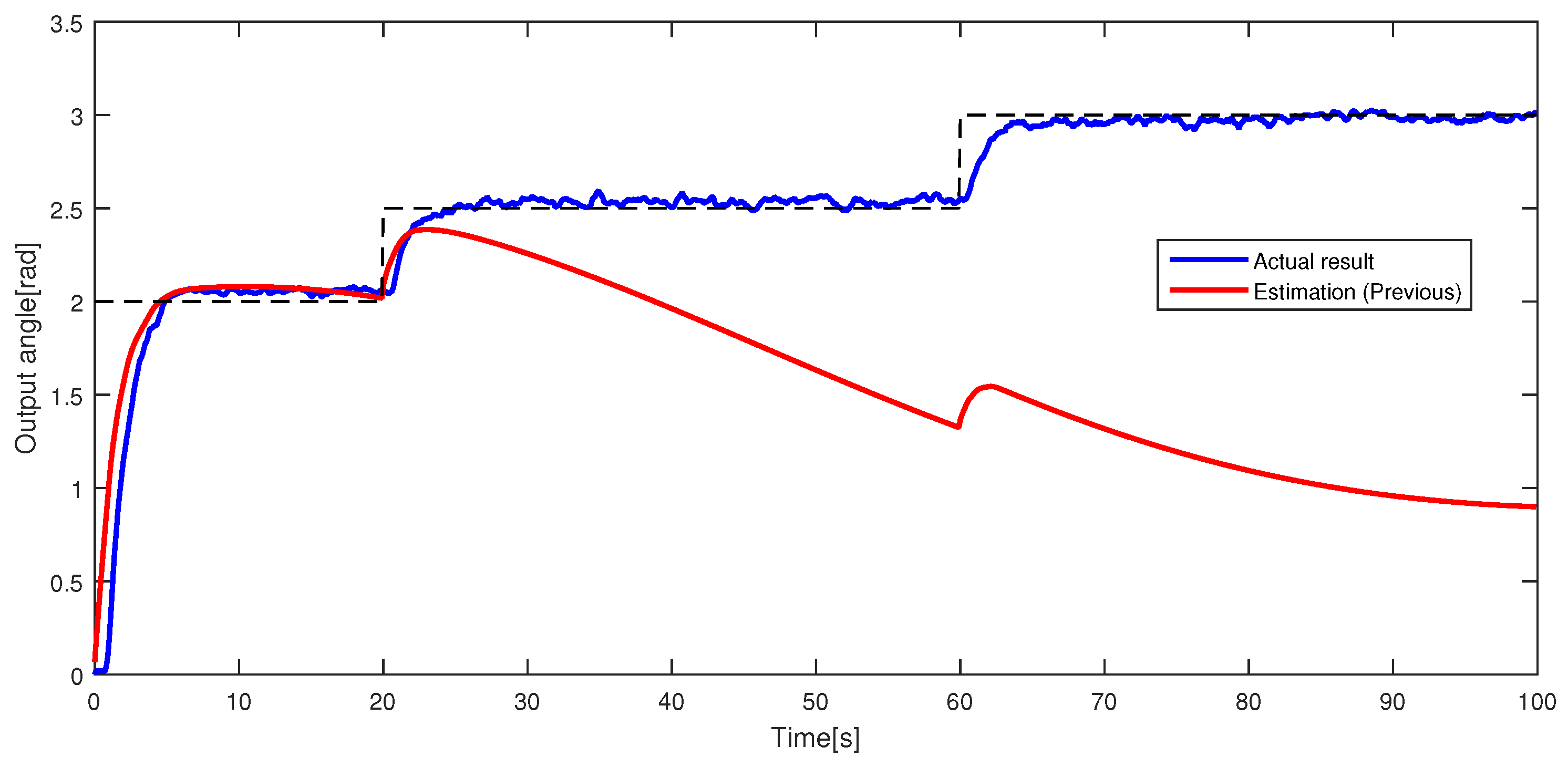
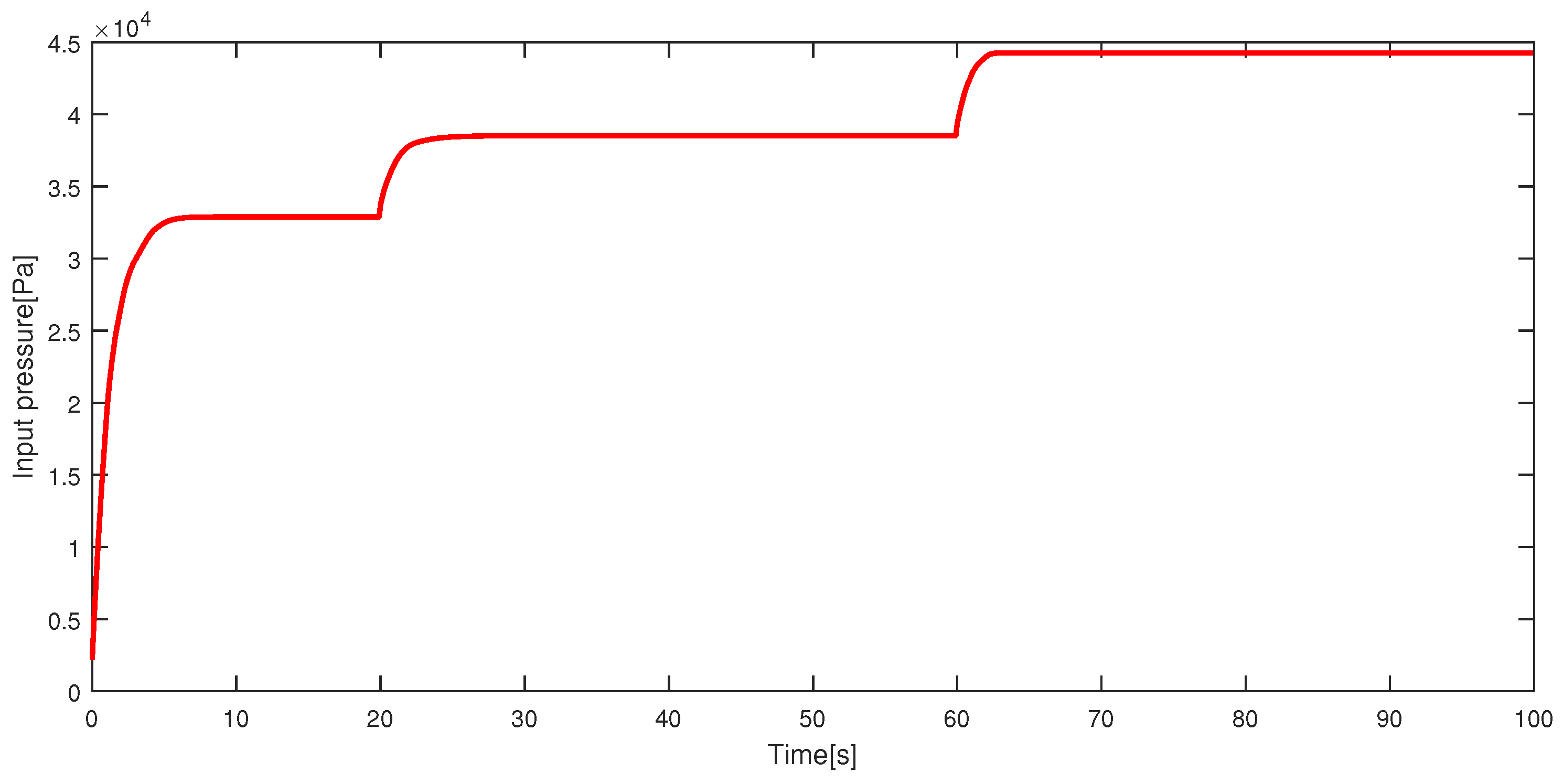
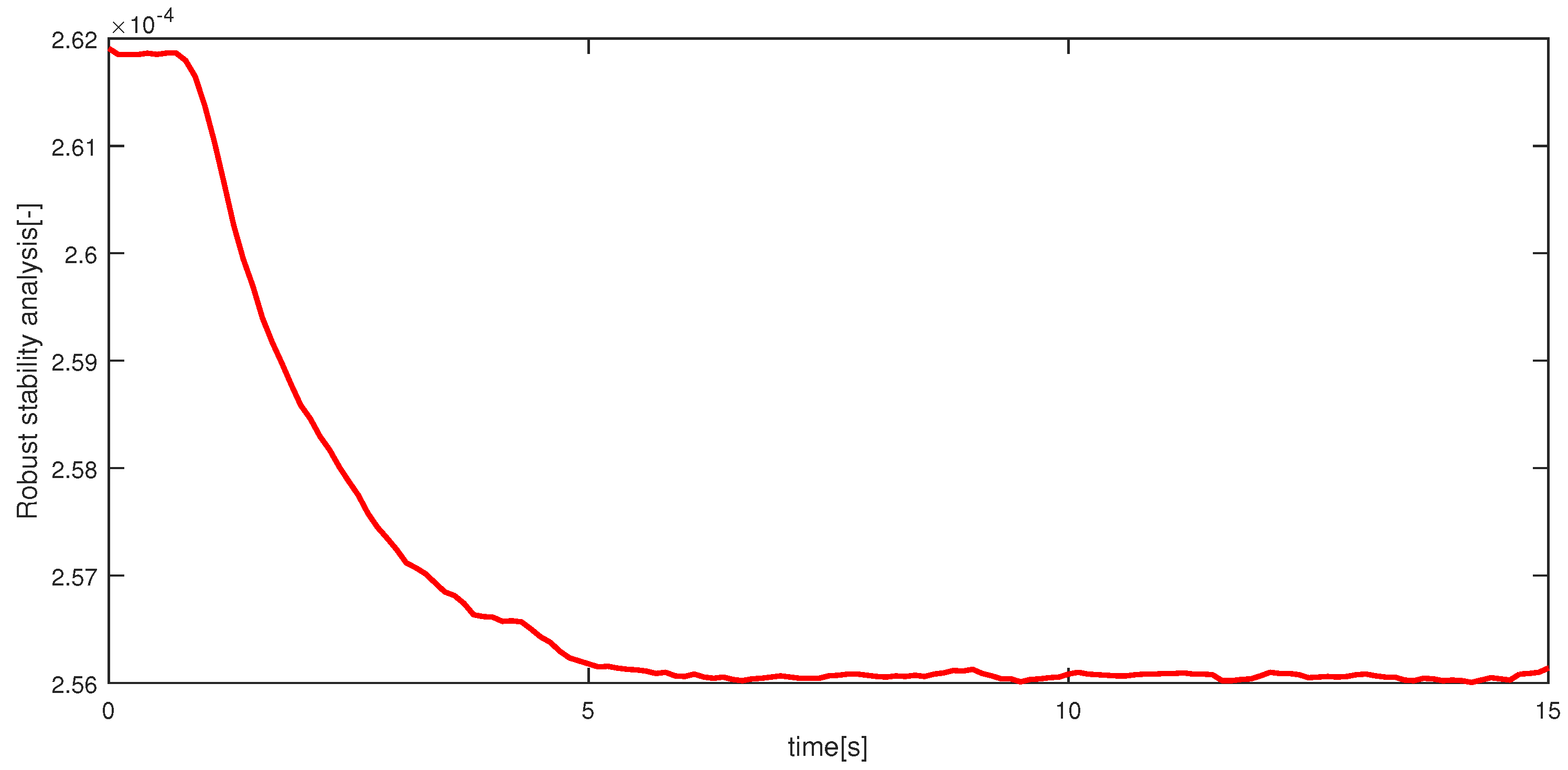
6.2. Experimental Result
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| SVM | Support vector machine |
| SVR | Support vector regression |
| PSO | Particle swarm optimization |
| GD | Gaussian distribution |
| GGD | Generalized Gaussian distribution |
| FEM | Finite element method |
References
- Wakimoto, S.; Suzumori, K.; Ogura, K. Miniature pneumatic curling rubber actuator generating bidirectional motion with one air-supply tube. Adv. Rob. 2011, 25, 1311–1330. [Google Scholar] [CrossRef]
- Vapnik, N.V. Statistical Learning Theory; Springer: New York, NY, USA, 1998. [Google Scholar]
- Jiang, L.; Deng, M.; Inoue, A. Support vector machine-based two wheeled mobile robot motion control in noisy environment. J. Syst. Control Eng. 2008, 222, 733–743. [Google Scholar] [CrossRef]
- Deng, M.; Kawashima, T. Adaptive Nonlinear Sensorless Control for an Uncertain Miniature Pneumatic Curling Rubber Actuator Using Passivity and Robust Right Coprime Factorization. IEEE Trans. Control Syst. Technol. 2016, 24, 318–324. [Google Scholar] [CrossRef]
- Yu, S.; Zhang, A.; Li, H. A Review of Estimating the Shape Parameter of Generalized Gaussian Distribution. J. Comput. Inf. Syst. 2012, 8, 9055–9064. [Google Scholar]
- Fujita, K.; Wakimoto, S.; Deng, M.; Wakitani, S. SVR-based input-output mapping of a micro-hand. In Proceedings of the 2015 International Conference on Advanced Mechatronic Systems, Beijing, China, 22–24 August 2015; pp. 538–541.
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948.
- Deng, M. Operator-Based Nonlinear Control Systems Design and Applications; Wiley-IEEE Press: Hoboken, NJ, USA, 2014. [Google Scholar]
- Deng, M.; Inoue, A.; Ishikawa, K. Operator based nonlinear feedback control design using robust right coprime factorization. IEEE Trans. Autom. Control 2006, 51, 645–648. [Google Scholar] [CrossRef]
- Deng, M.; Bu, N. Robust Control for Nonlinear Systems Using Passivity-Based Robust Right Coprime Factorization. IEEE Trans. Autom. Control 2012, 57, 2599–2604. [Google Scholar] [CrossRef]
- Deng, M.; Bu, N.; Inoue, A. Output tracking of nonlinear feedback systems with perturbation based on robust right coprime factorization. Int. J. Innov. Comput. Inf. Control 2009, 5, 3359–3366. [Google Scholar]
- Iwai, Z.; Mizumoto, I.; Deng, M. Simple adaptive control of processes with time-delay. J. Process Control 1997, 7, 439–449. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part of the Actuator | Parameter | Unit |
|---|---|---|
| Natural length of the actuator | (m) | |
| Length of the changeless part | (m) | |
| Length of the bellows side | L | (m) |
| Radius of the approximate circle | R | (m) |
| Bending angle | θ | (rad) |
| Parameter | Value |
|---|---|
| Cost parameter | |
| Error accuracy parameter | |
| Variance | |
| Shape parameter |
| Paramter | Value |
|---|---|
| Natural length of the actuator | m |
| Radius of the actuator | m |
| Thickness of the actuator | m |
| Rubber radius | m |
| Initial Young modulus | Pa |
| Control parameter | |
| Integral parameter | |
| Proportional parameter |
| Proposed Method | Previous Method | |
|---|---|---|
| Number of dataset | 1080 | 5472 |
| Computing time | s | s |
| Fit ratio |
| Proposed Method | Previous Method | |
|---|---|---|
| Number of dataset | 1437 | 5414 |
| Computing time | s | s |
| Fit ratio |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fujita, K.; Deng, M.; Wakimoto, S. A Miniature Pneumatic Bending Rubber Actuator Controlled by Using the PSO-SVR-Based Motion Estimation Method with the Generalized Gaussian Kernel. Actuators 2017, 6, 6. https://doi.org/10.3390/act6010006
Fujita K, Deng M, Wakimoto S. A Miniature Pneumatic Bending Rubber Actuator Controlled by Using the PSO-SVR-Based Motion Estimation Method with the Generalized Gaussian Kernel. Actuators. 2017; 6(1):6. https://doi.org/10.3390/act6010006
Chicago/Turabian StyleFujita, Kou, Mingcong Deng, and Shuichi Wakimoto. 2017. "A Miniature Pneumatic Bending Rubber Actuator Controlled by Using the PSO-SVR-Based Motion Estimation Method with the Generalized Gaussian Kernel" Actuators 6, no. 1: 6. https://doi.org/10.3390/act6010006
APA StyleFujita, K., Deng, M., & Wakimoto, S. (2017). A Miniature Pneumatic Bending Rubber Actuator Controlled by Using the PSO-SVR-Based Motion Estimation Method with the Generalized Gaussian Kernel. Actuators, 6(1), 6. https://doi.org/10.3390/act6010006