
Self-Sensing Ionic Polymer Actuators: A Review


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
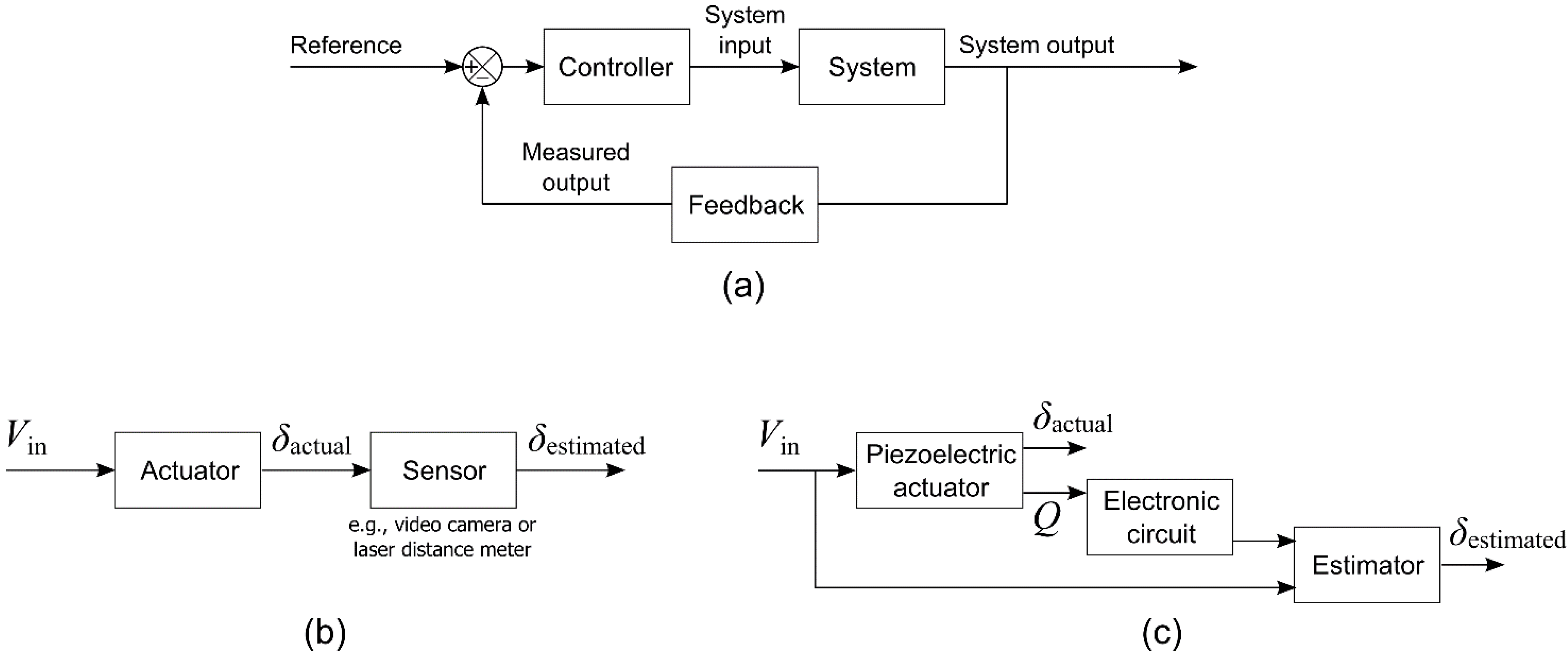
2. Self-Sensing Actuator
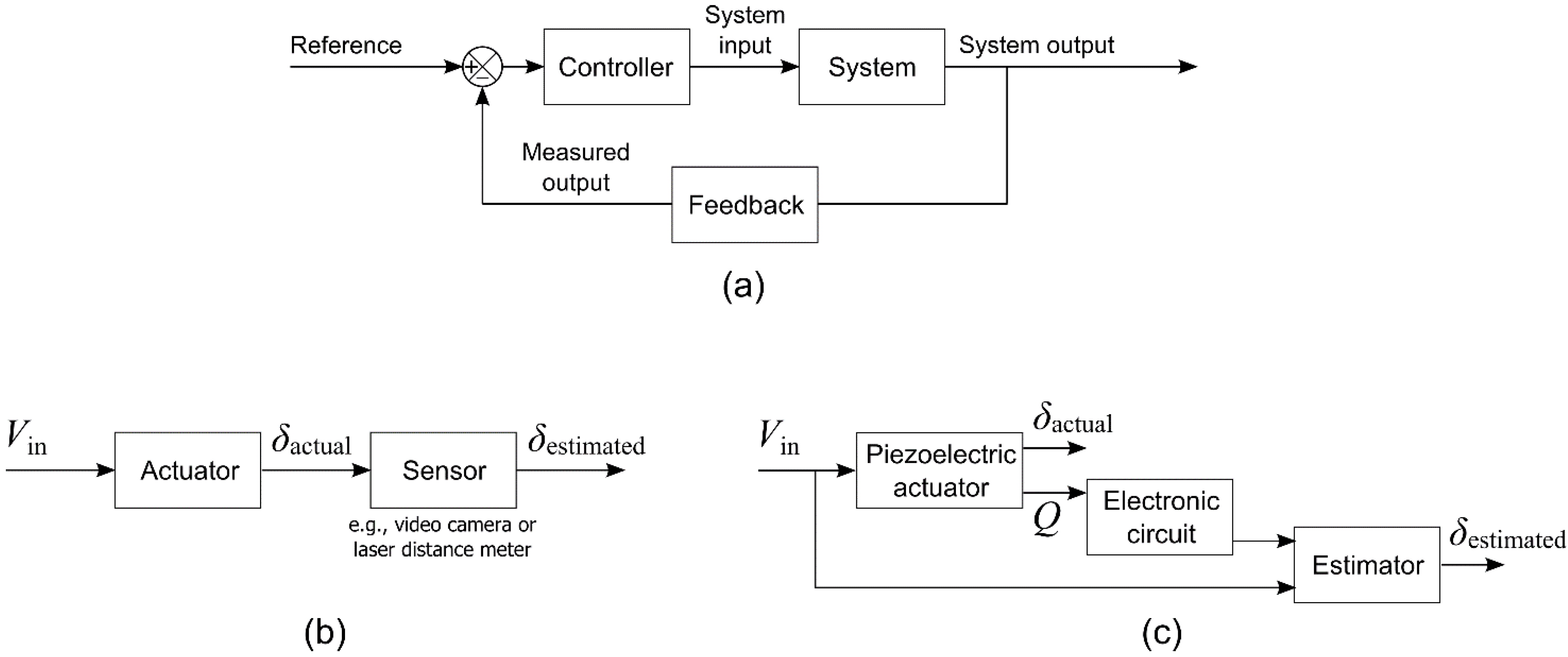

- (1)
- (2)
- (3)
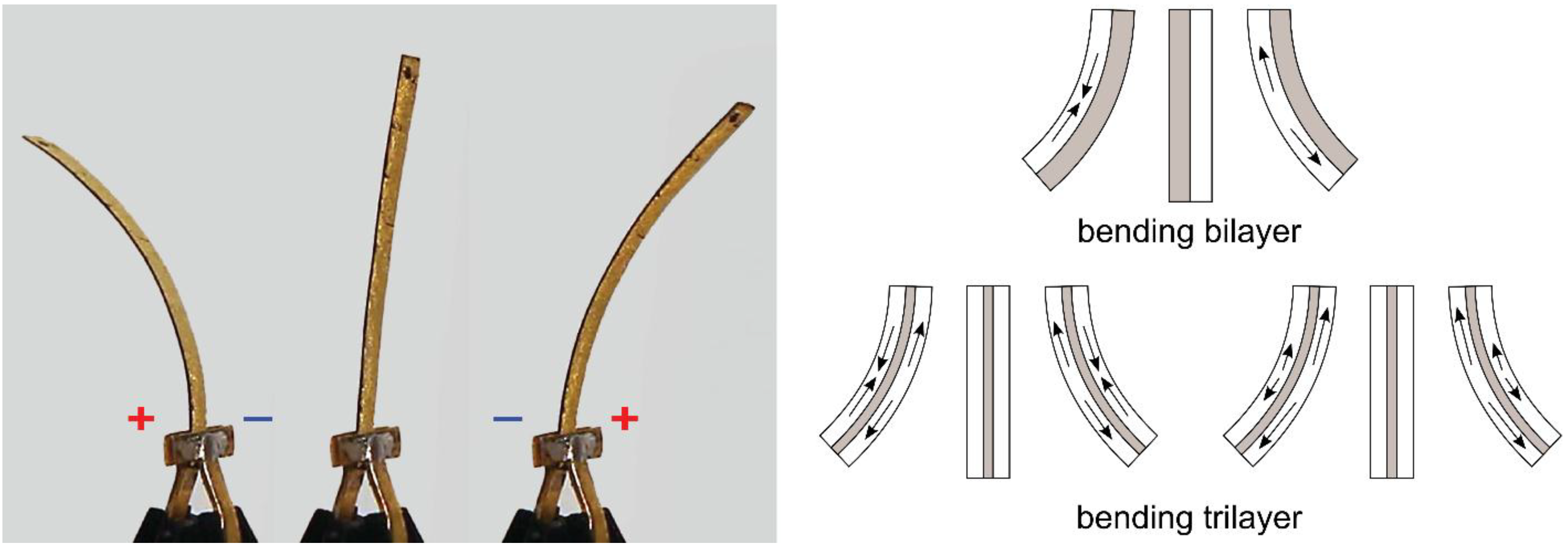
3. Conducting Polymer Actuators
3.1. Conducting Polymer Actuator and Sensor
3.2. Self-Sensing CPA
4. Ionic Polymer-Metal Composite Actuators
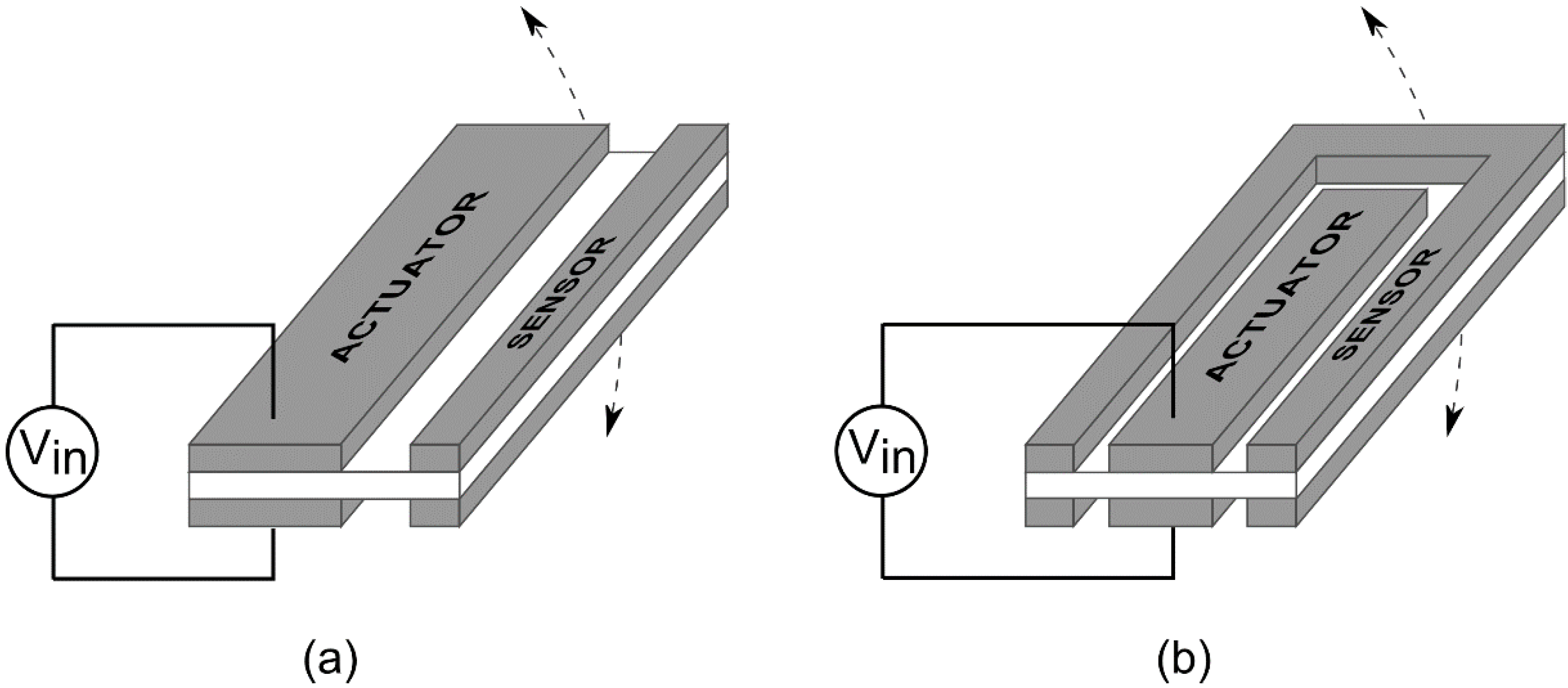
4.1. IPMC as Actuator and Sensor
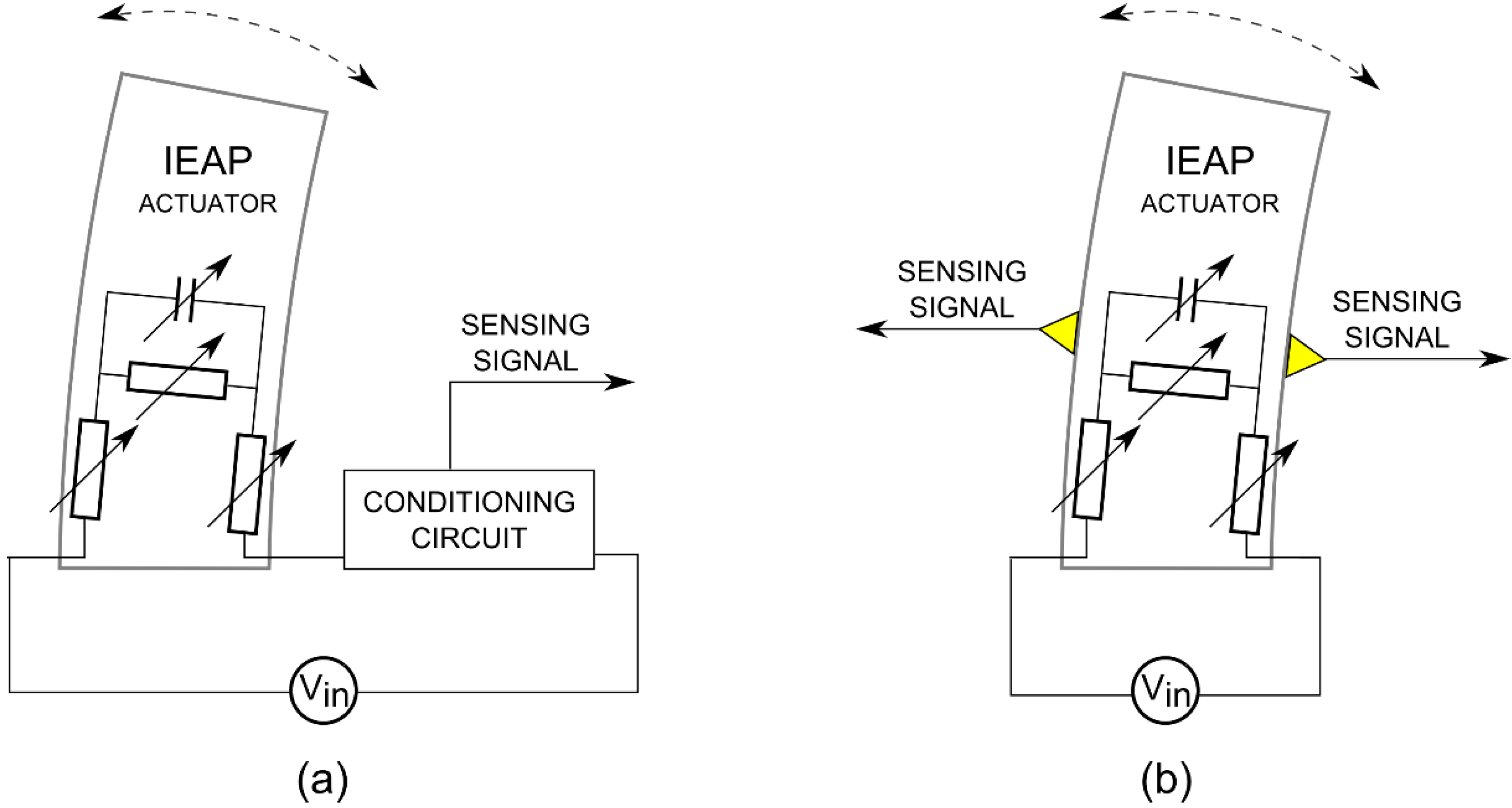
4.2. Self-Sensing IPMC

- (1)
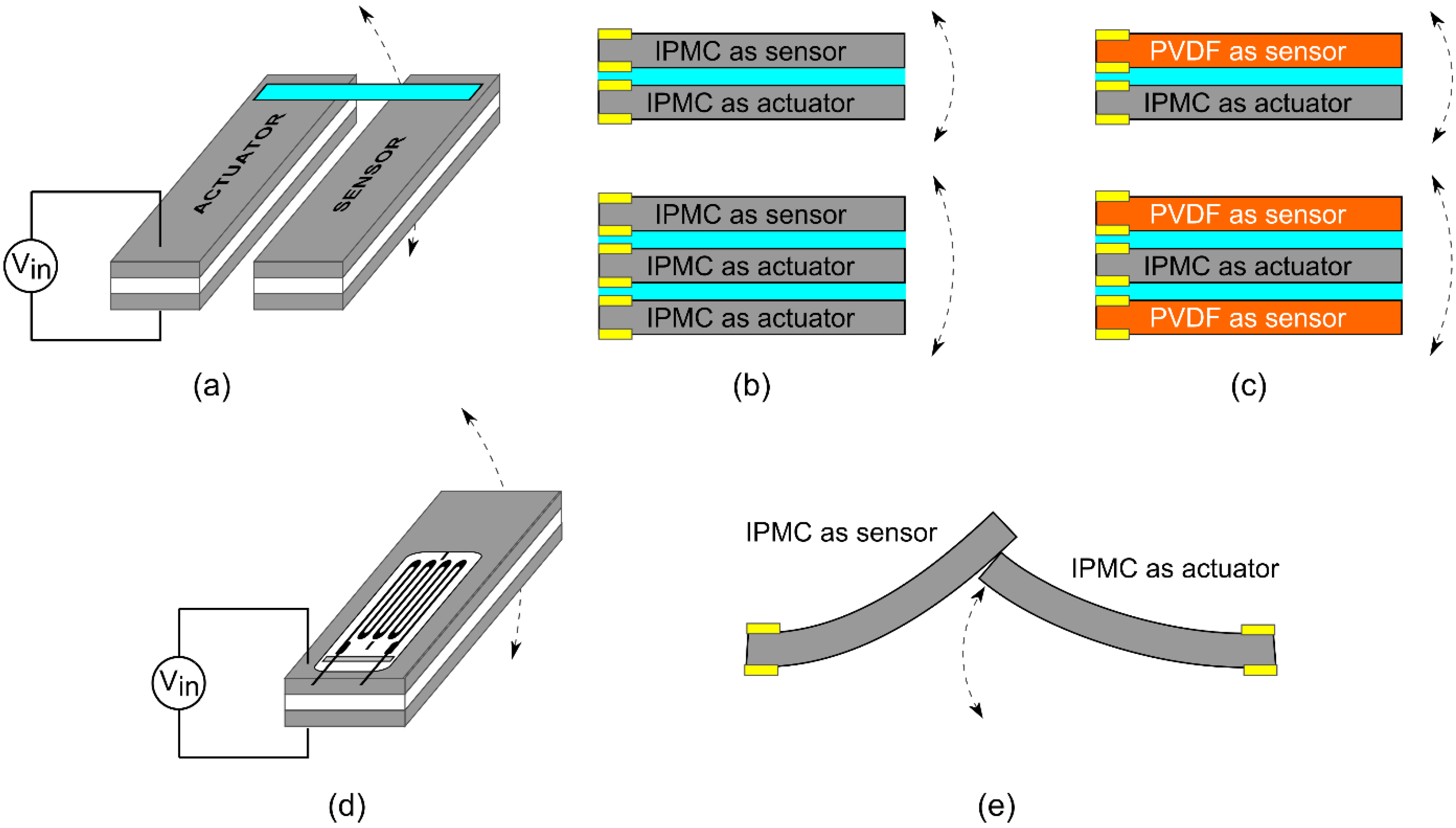
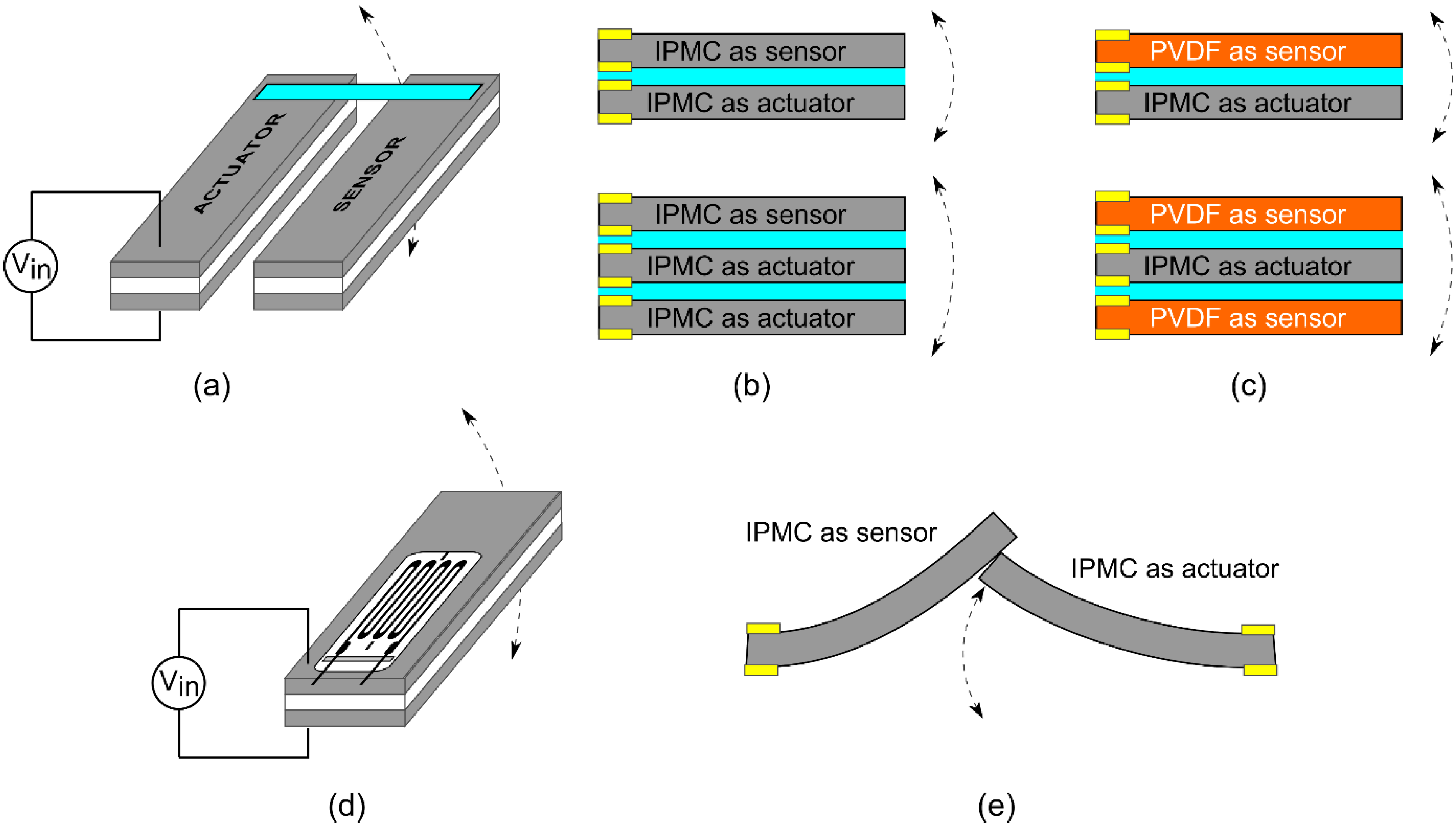
- Creating of a shielding electrode between the sensor and actuator (Figure 9a) which is connected to the system ground.
- (2)
- Connecting the opposite sensor electrodes in a bridge configuration and, thus, cancelling out the common mode noise in the sensing signal (Figure 9c).

5. Carbonaceous Polymer Actuators
5.1. Carbonaceous Polymer Composites as Actuators and Sensors
5.2. Self-Sensing Carbonaceous Polymer Actuator
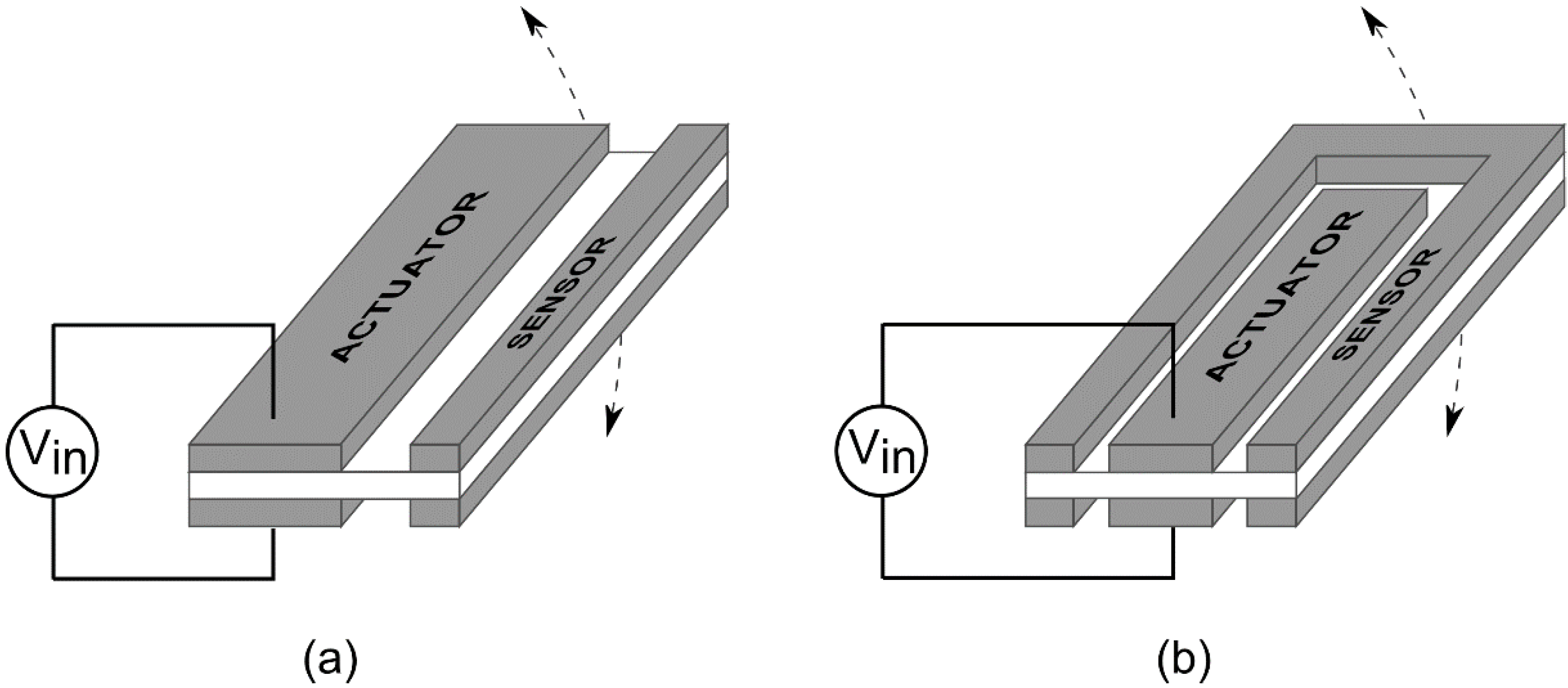
6. Alternatives to Self-Sensing: Mechanically Coupled Integrated Sensing
7. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bar-Cohen, Y. Electroactive polymer (EAP) actuators as artificial muscles: Reality, potential, and challenges, 2nd ed.; SPIE Press: Bellingham, WA, USA, 2004. [Google Scholar]
- Smela, E. Conjugated Polymer Actuators for Biomedical Applications. Adv. Mater. 2003, 15, 481–494. [Google Scholar] [CrossRef]
- Otero, T.F.; Martinez, J.G.; Arias-Pardilla, J. Biomimetic electrochemistry from conducting polymers. A review: Artificial muscles, smart membranes, smart drug delivery and computer/neuron interfaces. Electrochim. Acta 2012, 84, 112–128. [Google Scholar]
- Jo, C.; Pugal, D.; Oh, I.-K.; Kim, K.J.; Asaka, K. Recent advances in ionic polymer–metal composite actuators and their modeling and applications. Prog. Polym. Sci. 2013, 38, 1037–1066. [Google Scholar] [CrossRef]
- Kosidlo, U.; Omastová, M.; Micusík, M.; Ćirić-Marjanović, G.; Randriamahazaka, H.; Wallmersperger, T.; Aabloo, A.; Kolaric, I.; Bauernhansl, T. Nanocarbon based ionic actuators—A review. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Asaka, K.; Mukai, K.; Sugino, T.; Kiyohara, K. Ionic electroactive polymer actuators based on nano-carbon electrodes. Polym. Int. 2013, 62, 1263–1270. [Google Scholar] [CrossRef]
- Kong, L.; Chen, W. Carbon Nanotube and Graphene-based Bioinspired Electrochemical Actuators. Adv. Mater. 2014, 26, 1025–1043. [Google Scholar] [CrossRef] [PubMed]
- Torop, J.; Arulepp, M.; Leis, J.; Punning, A.; Johanson, U.; Palmre, V.; Aabloo, A. Nanoporous Carbide-Derived Carbon Material-Based Linear Actuators. Materials 2009, 3, 9–25. [Google Scholar] [CrossRef]
- Kim, K.J.; Pugal, D.; Leang, K.K. A Twistable Ionic Polymer-Metal Composite Artificial Muscle for Marine Applications. Mar. Technol. Soc. J. 2011, 45, 83–98. [Google Scholar] [CrossRef]
- Li, S.-L.; Kim, W.-Y.; Cheng, T.-H.; Oh, I.-K. A helical ionic polymer–metal composite actuator for radius control of biomedical active stents. Smart Mater. Struct. 2011, 20. [Google Scholar] [CrossRef]
- Punning, A.; Vunder, V.; Must, I.; Johanson, U.; Anbarjafari, G.; Aabloo, A. In situ scanning electron microscopy study of strains of ionic electroactive polymer actuators. J. Intell. Mater. Syst. Struct. under review.
- Punning, A.; Anton, M.; Kruusmaa, M.; Aabloo, A. A Biologically Inspired Ray-like Underwater Robot with Electroactive Polymer Pectoral Fins. In Proceedings of the IEEE Confrence on Mechatronics and Robotics 2004, Aachen, Germany, 13–15 September 2004; Volume 2, pp. 241–245.
- Sareh, S.; Rossiter, J.; Conn, A.; Drescher, K.; Goldstein, R.E. Swimming like algae: Biomimetic soft artificial cilia. J. R. Soc. Interface 2013, 10. [Google Scholar] [CrossRef] [PubMed]
- Yeom, S.-W.; Oh, I.-K. A biomimetic jellyfish robot based on ionic polymer metal composite actuators. Smart Mater. Struct. 2009, 18. [Google Scholar] [CrossRef]
- Must, I.; Kaasik, F.; Põldsalu, I.; Mihkels, L.; Johanson, U.; Punning, A.; Aabloo, A. Ionic and Capacitive Artificial Muscle for Biomimetic Soft Robotics. Adv. Eng. Mater. 2015, 17, 84–94. [Google Scholar] [CrossRef]
- Firouzeh, A.; Ozmaeian, M.; Alasty, A.; Iraji zad, A. An IPMC-made deformable-ring-like robot. Smart Mater. Struct. 2012, 21. [Google Scholar] [CrossRef]
- Vunder, V.; Punning, A.; Aabloo, A. Variable-focal lens using electroactive polymer actuator. Proc. SPIE 2011, 7977. [Google Scholar] [CrossRef]
- Lee, H.-K.; Choi, N.-J.; Jung, S.; Park, K.-H.; Jung, H.; Shim, J.-K.; Ryu, J.-W.; Kim, J. Electroactive Polymer Actuator for Lens-Drive Unit in Auto-Focus Compact Camera Module. ETRI J. 2009, 31, 695–702. [Google Scholar] [CrossRef]
- Ikushima, K.; John, S.; Ono, A.; Nagamitsu, S. PEDOT/PSS bending actuators for autofocus micro lens applications. Synth. Met. 2010, 160, 1877–1883. [Google Scholar] [CrossRef]
- Fukuda, K.; Sekitani, T.; Zschieschang, U.; Klauk, H.; Kuribara, K.; Yokota, T.; Sugino, T.; Asaka, K.; Ikeda, M.; Kuwabara, H.; et al. A 4 V Operation, Flexible Braille Display Using Organic Transistors, Carbon Nanotube Actuators, and Organic Static Random-Access Memory. Adv. Funct. Mater. 2011, 21, 4019–4027. [Google Scholar]
- Kato, Y.; Sekitani, T.; Takamiya, M.; Doi, M.; Asaka, K.; Sakurai, T.; Someya, T. Sheet-Type Braille Displays by Integrating Organic Field-Effect Transistors and Polymeric Actuators. IEEE Trans. Electron Devices 2007, 54, 202–209. [Google Scholar] [CrossRef]
- Krishen, K. Space applications for ionic polymer-metal composite sensors, actuators, and artificial muscles. Acta Astronaut. 2009, 64, 1160–1166. [Google Scholar] [CrossRef]
- Punning, A.; Kim, K.J.; Palmre, V.; Vidal, F.; Plesse, C.; Festin, N.; Maziz, A.; Asaka, K.; Sugino, T.; Alici, G.; et al. Ionic electroactive polymer artificial muscles in space applications. Sci. Rep. 2014, 4. [Google Scholar] [CrossRef]
- Ghamsari, A.K.; Zegeye, E.; Jin, Y.; Woldesenbet, E. Application of bucky gel in fabrication of a low-voltage rapid microvalve for flow regulation. ACS Appl. Mater. Interfaces 2013, 5, 5408–5412. [Google Scholar] [CrossRef] [PubMed]
- Addinall, R.; Sugino, T.; Neuhaus, R.; Kosidlo, U.; Tonner, F.; Glanz, C.; Kolaric, I.; Bauernhansl, T.; Asaka, K. Integration of CNT-based actuators for bio-medical applications—Example printed circuit board CNT actuator pipette. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besançon, France, 8–11 July 2014; pp. 1436–1441.
- Sareh, S.; Rossiter, J. Kirigami artificial muscles with complex biologically inspired morphologies. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Jager, E.W.H.; Immerstrand, C.; Peterson, K.H.; Magnusson, K.-E.; Lundström, I.; Inganäs, O. The Cell Clinic: Closable Microvials for Single Cell Studies. Biomed. Microdevices 2002, 4, 177–187. [Google Scholar] [CrossRef]
- Pugal, D.; Jung, K.; Aabloo, A.; Kim, K.J. Ionic polymer-metal composite mechanoelectrical transduction: Review and perspectives. Polym. Int. 2010, 59, 279–289. [Google Scholar] [CrossRef]
- Must, I.; Kaasik, F.; Põldsalu, I.; Johanson, U.; Punning, A.; Aabloo, A. A carbide-derived carbon laminate used as a mechanoelectrical sensor. Carbon 2012, 50, 535–541. [Google Scholar] [CrossRef]
- Wu, Y.; Alici, G.; Madden, J.D.W.; Spinks, G.M.; Wallace, G.G. Soft Mechanical Sensors through Reverse Actuation in Polypyrrole. Adv. Funct. Mater. 2007, 17, 3216–3222. [Google Scholar] [CrossRef]
- Punning, A.; Kruusmaa, M.; Aabloo, A. Surface resistance experiments with IPMC sensors and actuators. Sens. Actuators A Phys. 2007, 133, 200–209. [Google Scholar] [CrossRef]
- Kruusamäe, K.; Punning, A.; Aabloo, A. Electrical Model of a Carbon-Polymer Composite (CPC) Collision Detector. Sensors 2012, 12, 1950–1966. [Google Scholar] [CrossRef] [PubMed]
- Must, I.; Johanson, U.; Kaasik, F.; Põldsalu, I.; Punning, A.; Aabloo, A. Charging a supercapacitor-like laminate with ambient moisture: from a humidity sensor to an energy harvester. Phys. Chem. Chem. Phys. 2013, 15, 9605–9614. [Google Scholar] [CrossRef] [PubMed]
- Must, I.; Vunder, V.; Kaasik, F.; Põldsalu, I.; Johanson, U.; Punning, A.; Aabloo, A. Ionic liquid-based actuators working in air: The effect of ambient humidity. Sens. Actuators B Chem. 2014, 202, 114–122. [Google Scholar] [CrossRef]
- Martinez, J.G.; Otero, T.F. Biomimetic dual sensing-actuators: theoretical description. Sensing electrolyte concentration and driving current. J. Phys. Chem. B 2012, 116, 9223–9230. [Google Scholar]
- Brunetto, P.; Fortuna, L.; Giannone, P.; Graziani, S.; Strazzeri, S. Static and Dynamic Characterization of the Temperature and Humidity Influence on IPMC Actuators. IEEE Trans. Instrum. Meas. 2010, 59, 893–908. [Google Scholar] [CrossRef]
- Ghamsari, A.K.; Jin, Y.; Woldesenbet, E. Mechanical characterization of bucky gel morphing nanocomposite for actuating/sensing applications. Smart Mater. Struct. 2012, 21. [Google Scholar] [CrossRef]
- Kruusamäe, K.; Mukai, K.; Sugino, T.; Asaka, K. Impact of viscoelastic properties on bucky-gel actuator performance. J. Intell. Mater. Syst. Struct. 2014, 25, 2235–2245. [Google Scholar] [CrossRef]
- Di Pasquale, G.; Graziani, S.; Messina, F.G.; Pollicino, A.; Puglisi, R.; Umana, E. An investigation of the structure–property relationships in ionic polymer polymer composites (IP2Cs) manufactured by polymerization in situ of PEDOT/PSS on Nafion®117. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- Kruusamäe, K.; Mukai, K.; Sugino, T.; Asaka, K. Electroactive Shape-Fixing of Bucky-Gel Actuator. IEEE/ASME Trans. Mechatron. 2014. [Google Scholar] [CrossRef]
- Punning, A.; Must, I.; Põldsalu, I.; Vunder, V.; Temmer, R.; Kruusamäe, K.; Kaasik, F.; Torop, J.; Rinne, P.; Lulla, T.; et al. Lifetime measurements of ionic electroactive polymer actuators. J. Intell. Mater. Syst. Struct. 2014, 25, 2267–2275. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, S.; Lin, J.; Wang, D.; Jain, V.; Montazami, R.; Heflin, J.R.; Li, J.; Madsen, L.; Zhang, Q.M. Ion transport and storage of ionic liquids in ionic polymer conductor network composites. Appl. Phys. Lett. 2010, 96. [Google Scholar] [CrossRef]
- Vunder, V.; Punning, A.; Aabloo, A. Mechanical interpretation of back-relaxation of ionic electroactive polymer actuators. Smart Mater. Struct. 2012, 21. [Google Scholar] [CrossRef]
- Zhu, Z.; Asaka, K.; Chang, L.; Takagi, K.; Chen, H. Multiphysics of ionic polymer–metal composite actuator. J. Appl. Phys. 2013, 114. [Google Scholar] [CrossRef]
- Kruusamäe, K.; Mukai, K.; Sugino, T.; Asaka, K. Mechanical behaviour of bending bucky-gel actuators and its representation. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- Rakotondrabe, M.; Ivan, I.A.; Khadraoui, S.; Lutz, P.; Chaillet, N. Simultaneous Displacement/Force Self-Sensing in Piezoelectric Actuators and Applications to Robust Control. IEEE/ASME Trans. Mechatron. 2015, 20, 519–531. [Google Scholar] [CrossRef]
- Dosch, J.J.; Inman, D.J.; Garcia, E. A Self-Sensing Piezoelectric Actuator for Collocated Control. J. Intell. Mater. Syst. Struct. 1992, 3, 166–185. [Google Scholar] [CrossRef]
- Anderson, E.H.; Hagood, N.W. Simultaneous Piezoelectric Sensing/Actuation: Analysis and Application to Controlled Structures. J. Sound Vib. 1994, 174, 617–639. [Google Scholar] [CrossRef]
- Jung, K.; Kim, K.J.; Choi, H.R. A self-sensing dielectric elastomer actuator. Sens. Actuators A Phys. 2008, 143, 343–351. [Google Scholar] [CrossRef]
- Rosset, S.; O’Brien, B.M.; Gisby, T.; Xu, D.; Shea, H.R.; Anderson, I.A. Self-sensing dielectric elastomer actuators in closed-loop operation. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Gisby, T.A.; O’Brien, B.M.; Anderson, I.A. Self sensing feedback for dielectric elastomer actuators. Appl. Phys. Lett. 2013, 102. [Google Scholar] [CrossRef]
- Lan, C.-C.; Lin, C.-M.; Fan, C.-H. A Self-Sensing Microgripper Module with Wide Handling Ranges. IEEE/ASME Trans. Mechatron. 2011, 16, 141–150. [Google Scholar] [CrossRef]
- Pratt, J.; Flatau, A.B. Development and Analysis of a Self-Sensing Magnetostrictive Actuator Design. J. Intell. Mater. Syst. Struct. 1995, 6, 639–648. [Google Scholar] [CrossRef]
- Janocha, H. Adaptronics and Smart Structures, 2nd, rev. ed.; Springer: Berlin, Germany, 2007. [Google Scholar]
- Sasaki, M.; Lin, W.; Tamagawa, H.; Ito, S.; Kikuchi, K. Self-Sensing Control of Nafion-Based Ionic Polymer-Metal Composite (IPMC) Actuator in the Extremely Low Humidity Environment. Actuators 2013, 2, 74–85. [Google Scholar] [CrossRef]
- Otero, T.F.; Martinez, J.G. Physical and chemical awareness from sensing polymeric artificial muscles. Experiments and modeling. Prog. Polym. Sci. 2014. [Google Scholar] [CrossRef]
- Punning, A.; Kruusmaa, M.; Aabloo, A. A self-sensing ion conducting polymer metal composite (IPMC) actuator. Sens. Actuators A Phys. 2007, 136, 656–664. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K.; Nam, D.N.C.; Yoon, J.I. Identification of a nonlinear black-box model for a self-sensing polymer metal composite actuator. Smart Mater. Struct. 2010, 19. [Google Scholar] [CrossRef]
- Kruusamäe, K.; Punning, A.; Kruusmaa, M.; Aabloo, A. Dynamical variation of the impedances of IPMC. Proc. SPIE 2009, 7287. [Google Scholar] [CrossRef]
- Fang, B.-K.; Lin, C.-C.K.; Ju, M.-S. Development of sensing/actuating ionic polymer–metal composite (IPMC) for active guide-wire system. Sens. Actuator A Phys. 2010, 158, 1–9. [Google Scholar] [CrossRef]
- Bonomo, C.; Fortuna, L.; Giannone, P.; Graziani, S. A sensor-actuator integrated system based on IPMCs [ionic polymer metal composites]. In Proceedings of IEEE Sensors 2004, Vienna, Austria, 24–27 October 2004; pp. 489–492.
- Yamakita, M.; Sera, A.; Kamamichi, N.; Asaka, K. Integrated Design of an Ionic Polymer–Metal Composite Actuator/Sensor. Adv. Robot. 2008, 22, 913–928. [Google Scholar] [CrossRef]
- Hunt, A.; Chen, Z.; Tan, X.; Kruusmaa, M. Feedback Control of a Coupled IPMC (Ionic Polymer-Metal Composite) Sensor-Actuator. In Proceedings of the ASME 2009 Dynamic Systems and Control Conference, Hollywood, CA, USA, 12–14 October 2009; pp. 485–491.
- Akle, B.J.; Leo, D.J. Multilayer ionic polymer transducer. Proc. SPIE 2003, 5051, 214–225. [Google Scholar]
- Chen, Z.; Shen, Y.; Xi, N.; Tan, X. Integrated sensing for ionic polymer–metal composite actuators using PVDF thin films. Smart Mater. Struct. 2007, 16, S262–S271. [Google Scholar] [CrossRef]
- Chen, Z.; Kwon, K.-Y.; Tan, X. Integrated IPMC/PVDF sensory actuator and its validation in feedback control. Sens. Actuators. A Phys. 2008, 144, 231–241. [Google Scholar] [CrossRef]
- Leang, K.K.; Shan, Y.; Song, S.; Kim, K.J. Integrated Sensing for IPMC Actuators Using Strain Gages for Underwater Applications. IEEE/ASME Trans. Mechatron. 2012, 17, 345–355. [Google Scholar] [CrossRef]
- Alici, G.; Spinks, G.M.; Madden, J.D.; Wu, Y.; Wallace, G.G. Response Characterization of Electroactive Polymers as Mechanical Sensors. IEEE/ASME Trans. Mechatron. 2008, 13, 187–196. [Google Scholar] [CrossRef]
- John, S.W.; Alici, G.; Spinks, G.M.; Madden, J.D.; Wallace, G.G. Towards fully optimized conducting polymer bending sensors: The effect of geometry. Smart Mater. Struct. 2009, 18. [Google Scholar] [CrossRef]
- Otero, T.F.; Cortes, M.T. Artificial muscle: Movement and position control. Chem. Commun. 2004. [Google Scholar] [CrossRef]
- Otero, T.F.; Cortés, M.T. Artificial Muscles with Tactile Sensitivity. Adv. Mater. 2003, 15, 279–282. [Google Scholar] [CrossRef]
- Martinez, J.G.; Otero, T.F. Mechanical awareness from sensing artificial muscles: Experiments and modeling. Sens. Actuator B Chem. 2014, 195, 365–372. [Google Scholar] [CrossRef]
- Otero, T.F.; Sanchez, J.J.; Martinez, J.G. Biomimetic dual sensing-actuators based on conducting polymers. Galvanostatic theoretical model for actuators sensing temperature. J. Phys. Chem. B 2012, 116, 5279–5290. [Google Scholar]
- John, S.W.; Alici, G.; Cook, C.D. Towards the position control of conducting polymer trilayer bending actuators with integrated feedback sensor. In Proceedings of the 2009 IEEE/ASME International Conference Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 65–70.
- Nemat-Nasser, S. Micromechanics of actuation of ionic polymer-metal composites. J. Appl. Phys. 2002, 92. [Google Scholar] [CrossRef]
- Akle, B.J.; Leo, D.J.; Hickner, M.A.; McGrath, J.E. Correlation of capacitance and actuation in ionomeric polymer transducers. J. Mater. Sci. 2005, 40, 3715–3724. [Google Scholar] [CrossRef]
- Kocer, B.; Weiland, L.M. Experimental investigation of the streaming potential hypothesis for ionic polymer transducers in sensing. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Aureli, M.; Porfiri, M. Nonlinear sensing of ionic polymer metal composites. Contin. Mech. Thermodyn. 2013, 25, 273–310. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Design and Verification of a Non-linear Black-Box Model for Ionic Polymer Metal Composite Actuators. J. Intell. Mater. Syst. Struct. 2011, 22, 253–269. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Modeling of an ionic polymer metal composite actuator based on an extended Kalman filter trained neural network. Smart Mater. Struct. 2014. [Google Scholar] [CrossRef]
- Nam, D.N.C.; Ahn, K.K. Analysis and experiment on a self-sensing ionic polymer–metal composite actuator. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- Nam, D.N.C.; Ahn, K.K. Modeling and control of a self-sensing polymer metal composite actuator. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- Jeon, J.-H.; Yeom, S.-W.; Oh, I.-K. Fabrication and actuation of ionic polymer metal composites patterned by combining electroplating with electroless plating. Compos. Part A Appl. Sci. Manuf. 2008, 39, 588–596. [Google Scholar] [CrossRef]
- Rossiter, J.; Mukai, T. Electrostatic and thermal segmentation of multi-segment IPMC sensor-actuators. Proc. SPIE 2011, 7976. [Google Scholar] [CrossRef]
- Kruusamäe, K.; Brunetto, P.; Punning, A.; Kodu, M.; Jaaniso, R.; Graziani, S.; Fortuna, L.; Aabloo, A. Electromechanical model for a self-sensing ionic polymer–metal composite actuating device with patterned surface electrodes. Smart Mater. Struct. 2011, 20. [Google Scholar] [CrossRef]
- Konyo, M.; Konishi, Y.; Tadokoro, S.; Kishima, T. Development of velocity sensor using ionic polymer–metal composites. Proc. SPIE 2004, 5385, 307–318. [Google Scholar]
- Nakadoi, H.; Sera, A.; Yamakita, M.; Asaka, K.; Luo, Z.-W.; Ito, K. Integrated actuator-sensor system on patterned IPMC film: Consideration of electoric interference. In Proceedings of the 4th IEEE International Conference on Mechatronics, Kumamoto, Japan, 8–10 May 2007; pp. 1–6.
- Kamamichi, N.; Stoimenov, B.; Mukai, T.; Asaka, K. A Sensor-Actuator Integrated System with a Patterned IPMC—the interference of actuation to the sensing signal—. In Proceedings of the 7th Meeting of the System Integration Division SICE, Sapporo, Japan, 14–17 December 2006; pp. 175–176.
- Nishida, G.; Sugiura, M.; Yamakita, M.; Maschke, B.; Ikeura, R. Multi-Input Multi-Output Integrated Ionic Polymer-Metal Composite for Energy Controls. Micromachines 2012, 3, 126–136. [Google Scholar] [CrossRef]
- Kruusamäe, K.; Brunetto, P.; Graziani, S.; Punning, A.; Di Pasquale, G.; Aabloo, A. Self-sensing ionic polymer-metal composite actuating device with patterned surface electrodes. Polym. Int. 2010, 59, 300–304. [Google Scholar] [CrossRef]
- Kruusamäe, K.; Brunetto, P.; Graziani, S.; Fortuna, L.; Kodu, M.; Jaaniso, R.; Punning, A.; Aabloo, A. Experiments with self-sensing IPMC actuating device. Proc. SPIE 2010, 7642. [Google Scholar] [CrossRef]
- Zhu, Z.; Chang, L.; Asaka, K.; Wang, Y.; Chen, H.; Zhao, H.; Li, D. Comparative experimental investigation on the actuation mechanisms of ionic polymer–metal composites with different backbones and water contents. J. Appl. Phys. 2014, 115. [Google Scholar] [CrossRef]
- Ko, B.G.; Kwon, H.C.; Lee, S.J. A Self-Sensing Method for IPMC Actuator. Adv. Sci. Technol. 2008, 56, 111–115. [Google Scholar] [CrossRef]
- Kamamichi, N.; Yamakita, M.; Asaka, K.; Luo, Z.; Mukai, T. Sensor Property of a Novel EAP Device with Ionic-liquid-based Bucky Gel. In Proceedings of the 2007 IEEE Sensors, Atlanta, GA, USA, 28–31 October 2007; pp. 221–224.
- Must, I.; Anton, M.; Viidalepp, E.; Põldsalu, I.; Punning, A.; Aabloo, A. Mechanoelectrical impedance of a carbide-derived carbon-based laminate motion sensor at large bending deflections. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Tanaka, K.; Sugiura, M.; Yamakita, M.; Kamamichi, N.; Mukai, T. Integrated Actuator-Sensor System of Bucky Gel Device. In Proceedings of SICE Annual Conference 2010, Taipei, Taiwan, 18–21 August 2010; Volume 4, pp. 2472–2478.
- Kruusamäe, K.; Punning, A.; Aabloo, A. Self-sensing properties of carbon-polymer composite (CPC) actuators. Proc. SPIE 2011, 7976. [Google Scholar] [CrossRef]
- Kruusamäe, K.; Kaasik, F.; Punning, A.; Aabloo, A. Self-sensing ionic electromechanically active actuator with patterned carbon electrodes. Proc. SPIE 2013, 8687. [Google Scholar] [CrossRef]
- Tamagawa, H.; Lin, W.; Kikuchi, K.; Sasaki, M. Bending control of Nafion-based electroactive polymer actuator coated with multi-walled carbon nanotubes. Sens. Actuators B Chem. 2011, 156, 375–382. [Google Scholar] [CrossRef]
- Festin, N.; Plesse, C.; Chevrot, C.; Teyssié, D.; Josselin, L.; Pirim, P.; Vidal, F. Actuation and Sensing properties of Electroactive Polymer Whiskers. Procedia Comput. Sci. 2011, 7, S4–S7. [Google Scholar] [CrossRef]
- Akle, B.; Leo, D.J. Electromechanical transduction in multilayer ionic transducers. Smart Mater. Struct. 2004, 13, 1081–1089. [Google Scholar] [CrossRef]
- Bohn, C.; Sadki, S.; Brennan, A.B.; Reynolds, J.R. In Situ Electrochemical Strain Gage Monitoring of Actuation in Conducting Polymers. J. Electrochem. Soc. 2002, 149, E281–E285. [Google Scholar] [CrossRef]
- Feng, G.-H.; Huang, W.-L. A self-strain feedback tuning-fork-shaped ionic polymer metal composite clamping actuator with soft matter elasticity-detecting capability for biomedical applications. Mater. Sci. Eng. C Mater. Biol. Appl. 2014, 45, 241–249. [Google Scholar] [CrossRef] [PubMed]
- Bonomo, C.; Brunetto, P.; Fortuna, L.; Giannone, P.; Graziani, S.; Strazzeri, S. A tactile sensor for biomedical applications based on IPMCs. IEEE Sens. J. 2008, 8, 1486–1493. [Google Scholar] [CrossRef]
- Richardson, R.C.; Levesley, M.C.; Brown, M.D.; Hawkes, J.A.; Watterson, K.; Walker, P.G. Control of ionic polymer metal composites. IEEE/ASME Trans. Mechatron. 2003, 8, 245–253. [Google Scholar] [CrossRef]
- Vunder, V.; Itik, M.; Põldsalu, I.; Punning, A.; Aabloo, A. Inversion-based control of ionic polymer–metal composite actuators with nanoporous carbon-based electrodes. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- Druitt, C.M.; Alici, G. Intelligent control of electroactive polymer actuators based on fuzzy and neurofuzzy methodologies. IEEE/ASME Trans. Mechatron. 2014, 19, 1951–1962. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kruusamäe, K.; Punning, A.; Aabloo, A.; Asaka, K. Self-Sensing Ionic Polymer Actuators: A Review. Actuators 2015, 4, 17-38. https://doi.org/10.3390/act4010017
Kruusamäe K, Punning A, Aabloo A, Asaka K. Self-Sensing Ionic Polymer Actuators: A Review. Actuators. 2015; 4(1):17-38. https://doi.org/10.3390/act4010017
Chicago/Turabian StyleKruusamäe, Karl, Andres Punning, Alvo Aabloo, and Kinji Asaka. 2015. "Self-Sensing Ionic Polymer Actuators: A Review" Actuators 4, no. 1: 17-38. https://doi.org/10.3390/act4010017
APA StyleKruusamäe, K., Punning, A., Aabloo, A., & Asaka, K. (2015). Self-Sensing Ionic Polymer Actuators: A Review. Actuators, 4(1), 17-38. https://doi.org/10.3390/act4010017