
Fixed-Time Adaptive Neural Network-Based Trajectory Tracking Control for Workspace Manipulators


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- The homogeneous embryo transformation enables tangent-type error transformation, ensuring tracking error convergence to a specific region and preventing “performance spikes” seen in traditional control methods;
- The integration of the preset performance control strategy into the fixed-time stability theoretical framework not only ensures that the state converges to a predetermined region within a predetermined time, but also further adjusts the convergence speed and accuracy to achieve better control performance;
- The use of neural networks to approximate the unknown dynamical parameters and compensate the prediction results to the controller improves the robustness and adaptive ability of the controller without the need of known uncertainty boundaries of the system.
2. System Modeling and Problem Formulation
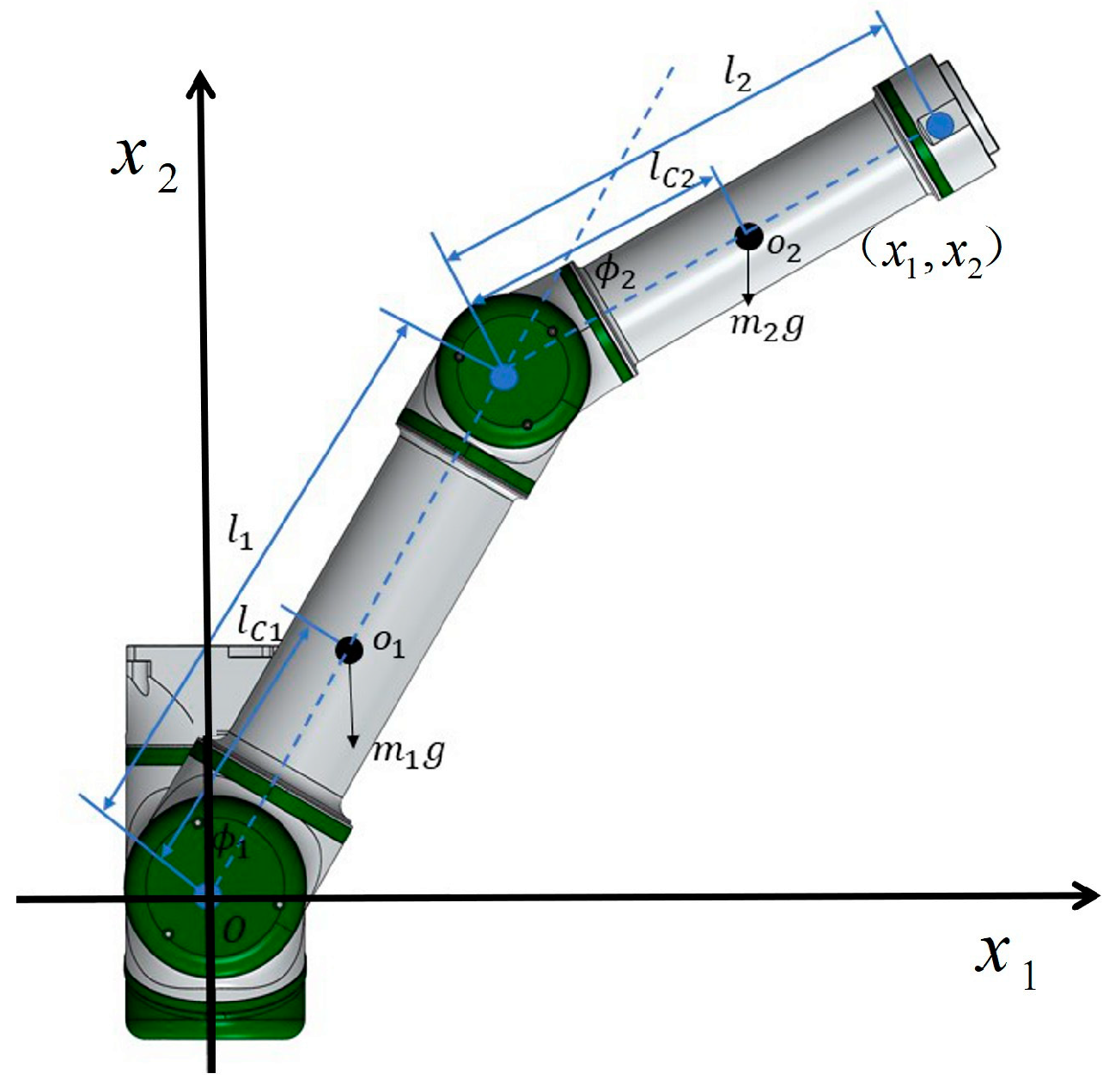
2.1. Coordinate Transformation
2.2. Neural Network Modeling of Manipulators
2.3. Fixed-Time Preset Performance Function
- (1)
- The function is strictly growing and smooth;
- (2)
- ;
- (3)
- , .
3. Controller Design
3.1. Homoembryonic Error Equivalent Transformation
- (1)
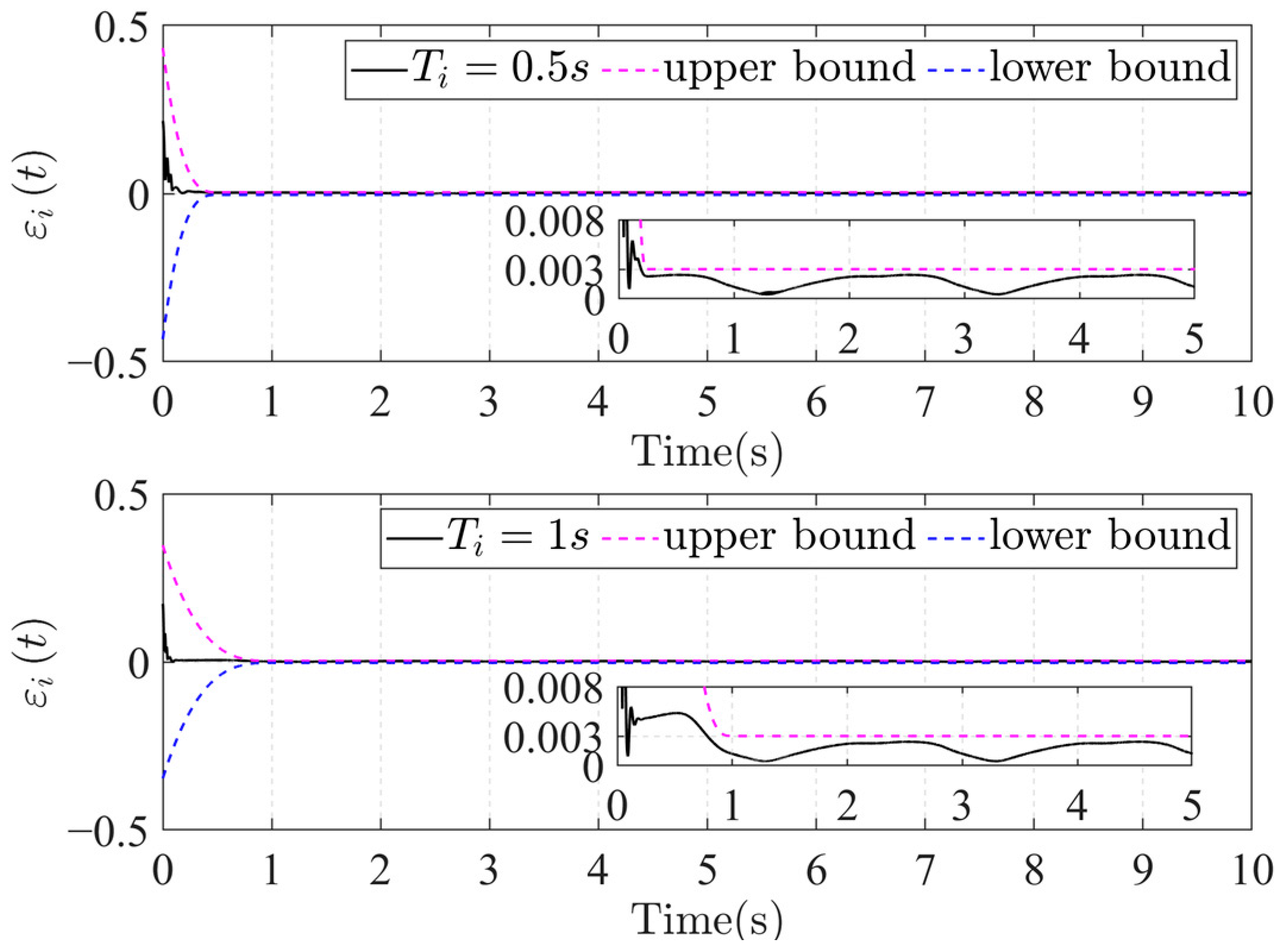
- The system’s adjustment time must be less than 1 s under any operating conditions and reference signal changes;
- (2)
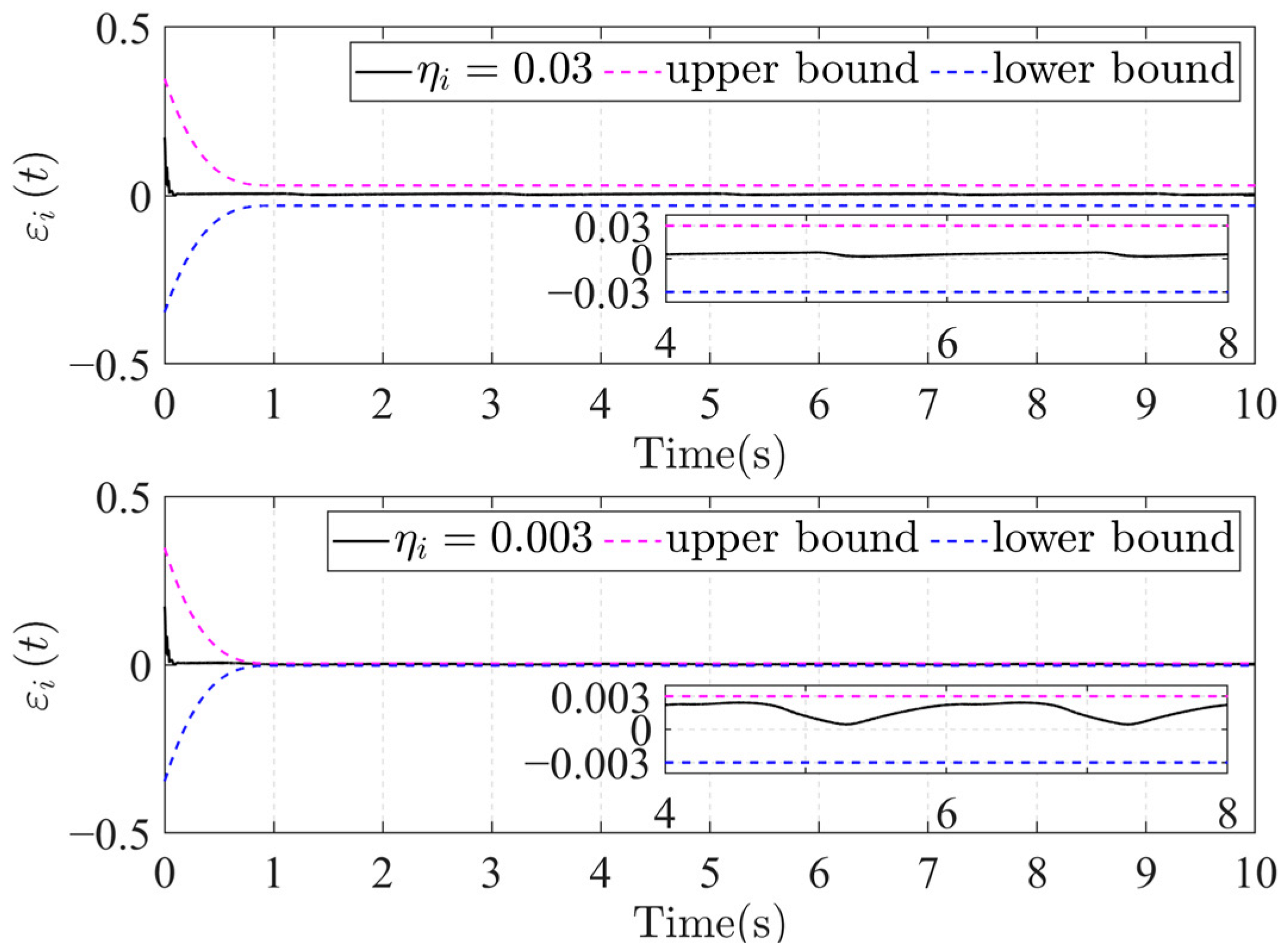
- The steady state tracking error is less than 0.03;
- (3)
- The tracking error of the system is limited to the upper and lower bounds of the preset performance function.
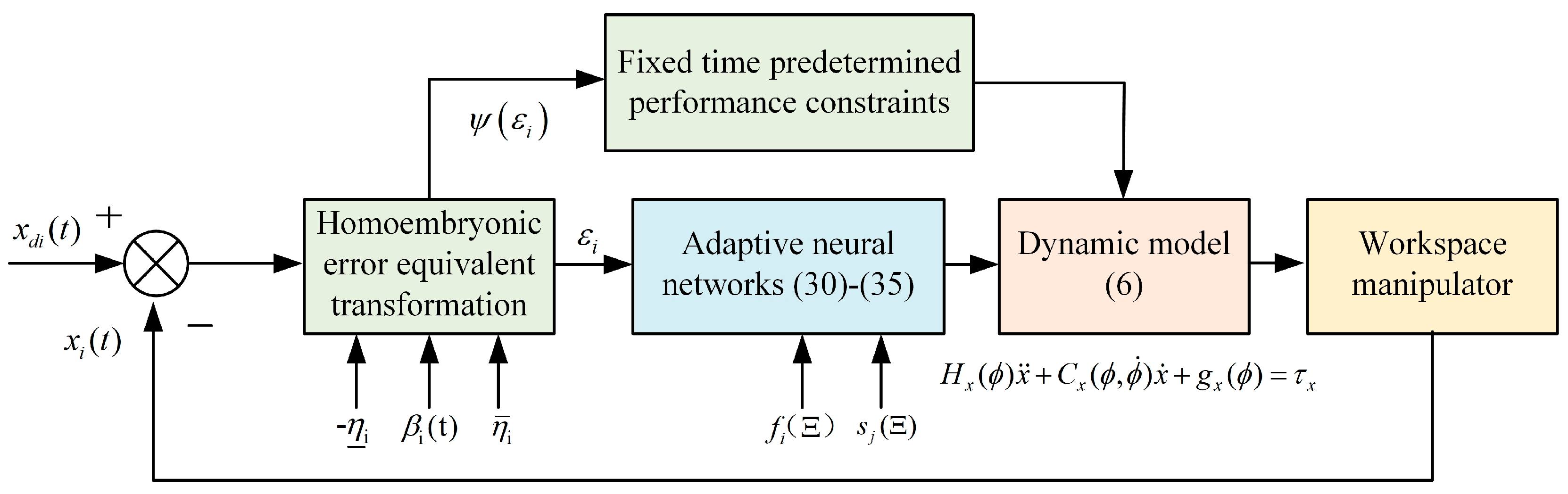
3.2. Neural Network Controller Design
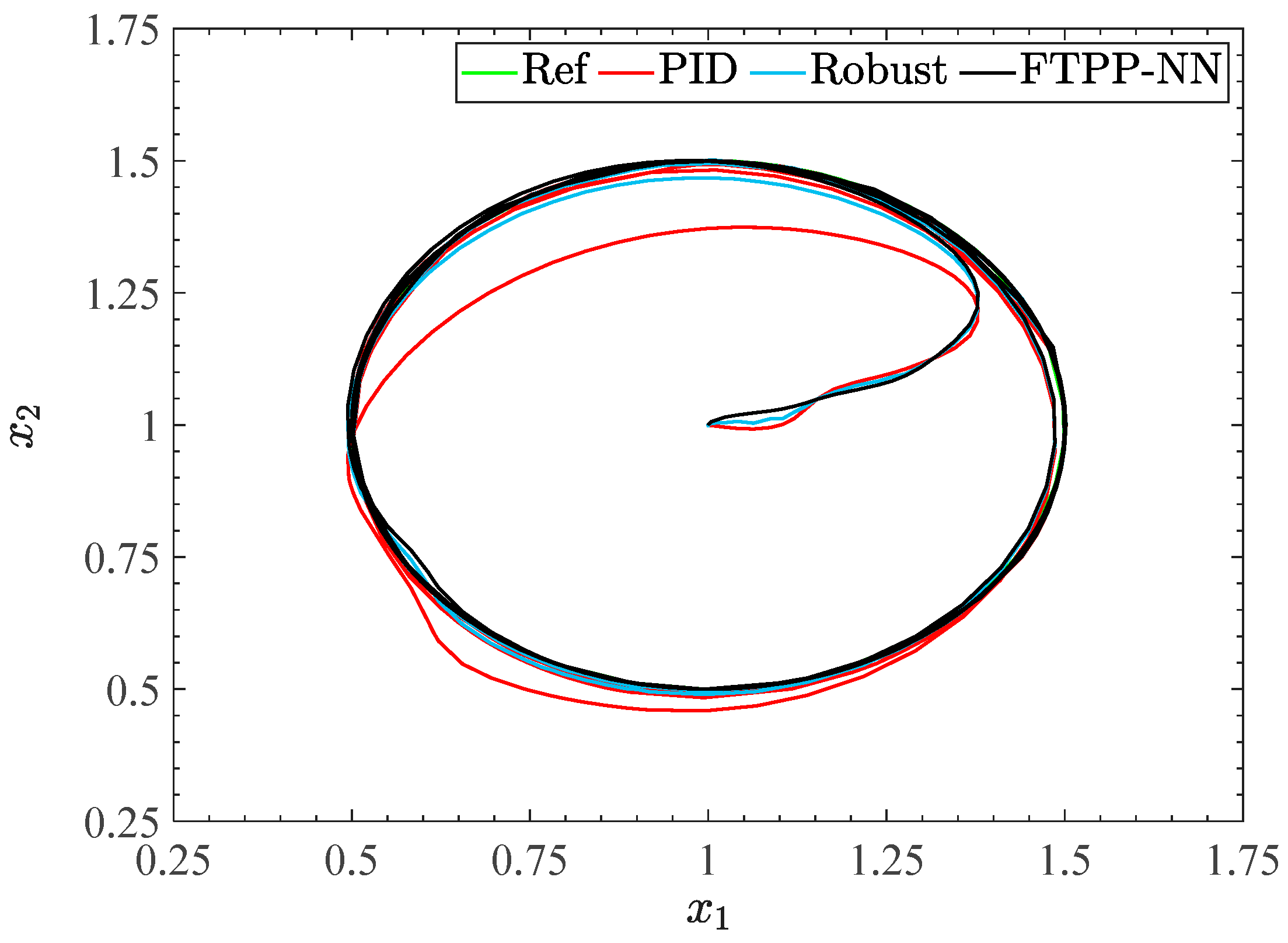
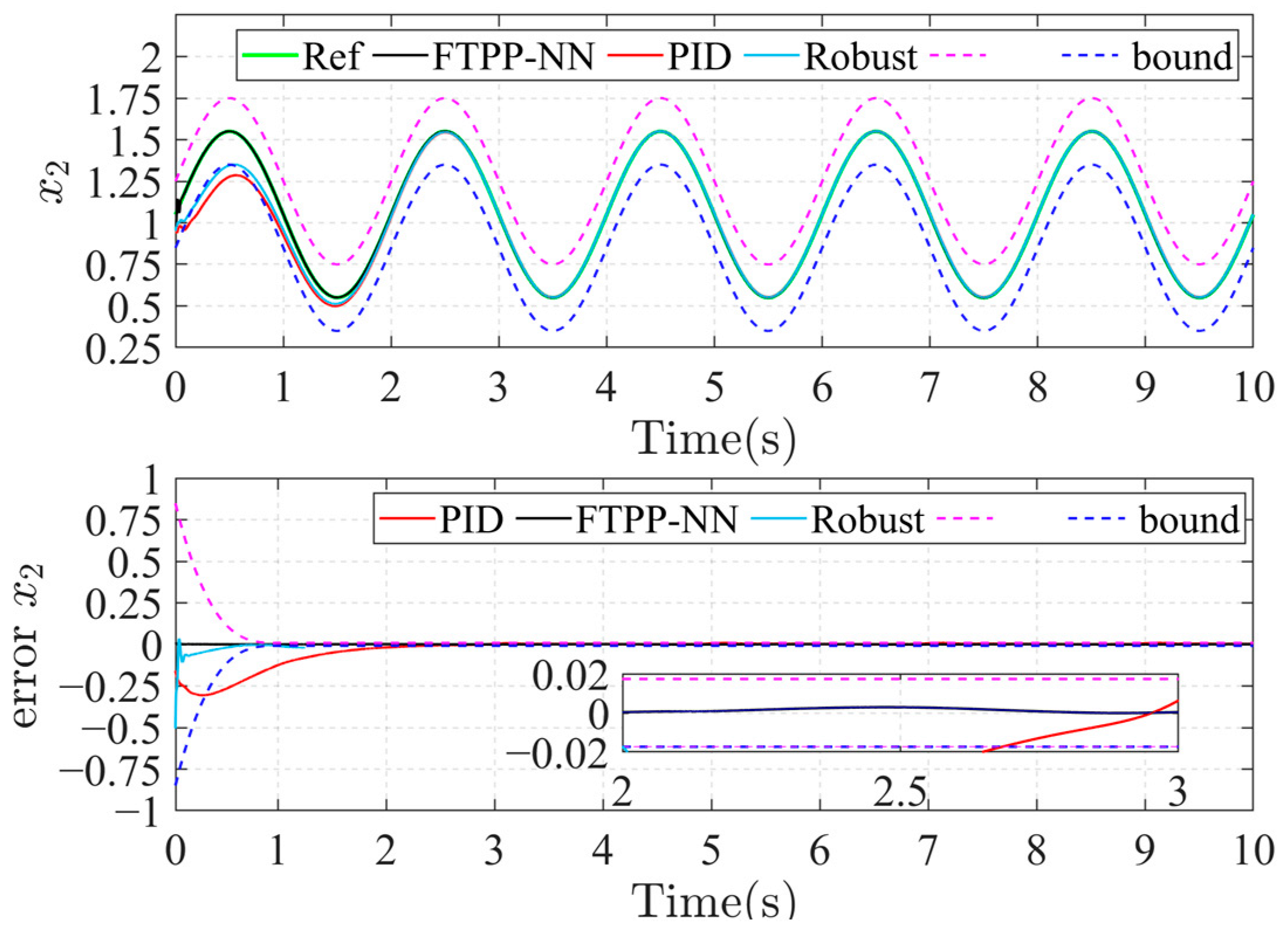
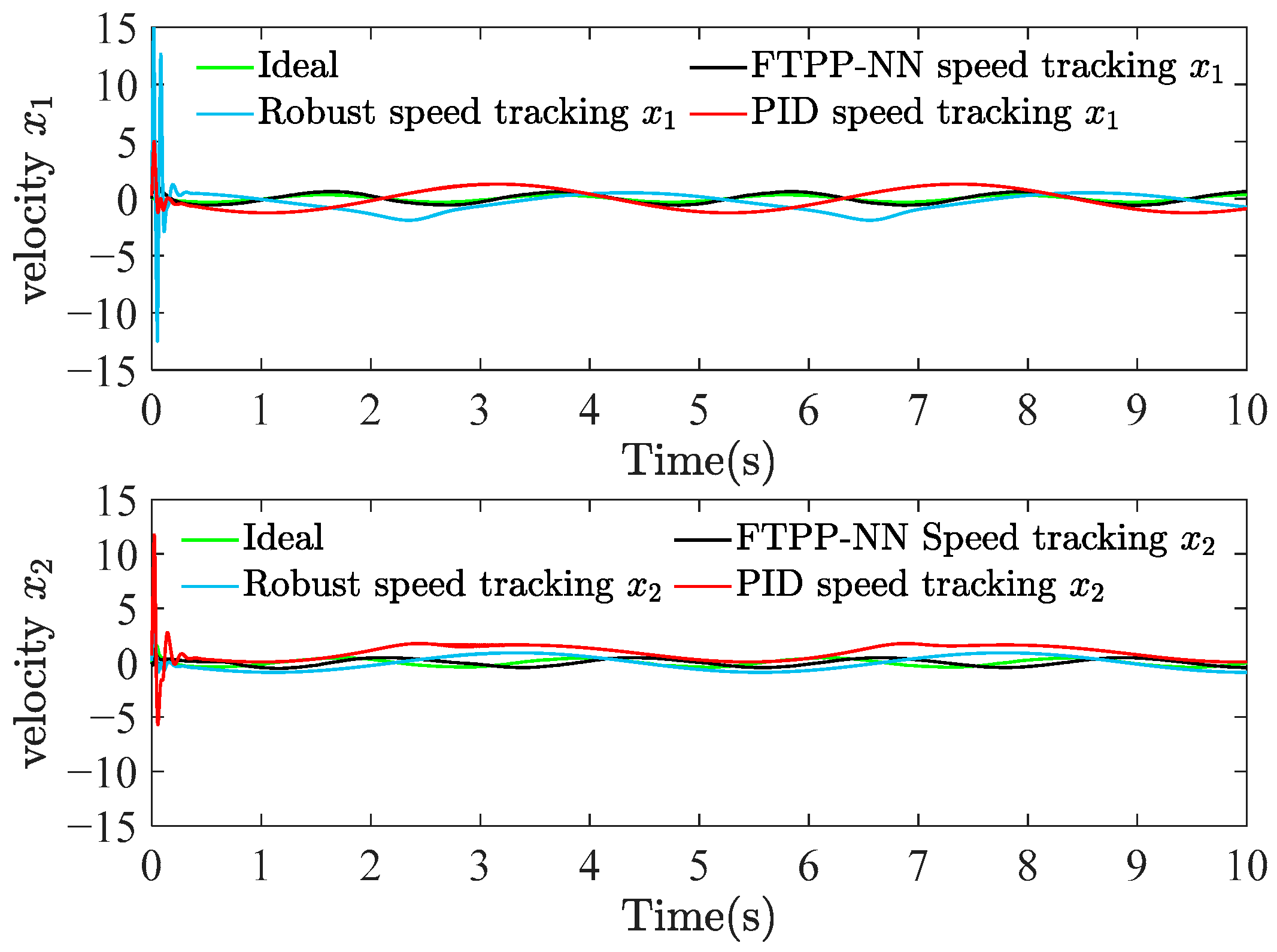
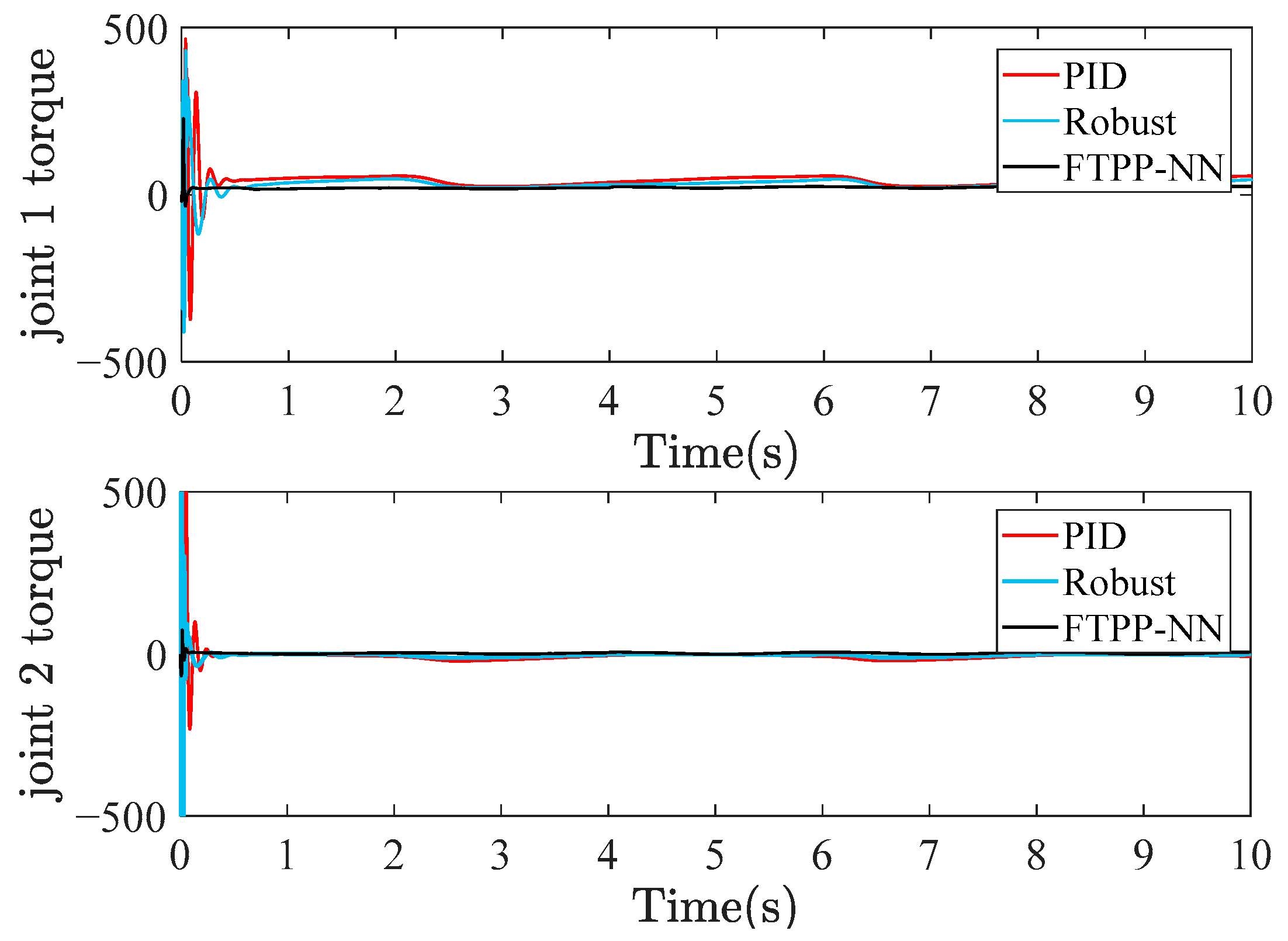
4. Simulation Experiment Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, Z.; Zhou, S.; Shen, C.; Lyu, L.; Zhang, J.; Yao, B. Observer-Based Adaptive Robust Precision Motion Control of a Multi-Joint Hydraulic Manipulator. IEEE/CAA J. Autom. Sin. 2024, 11, 1213–1226. [Google Scholar] [CrossRef]
- Li, Z.; Li, S. Recursive Recurrent Neural Network: A Novel Model for Manipulator Control with Different Levels of Physical Constraints. CAAI Trans. Intell. Technol. 2023, 8, 622–634. [Google Scholar] [CrossRef]
- Ahmed, S.; Azar, A.T. Adaptive Fractional Tracking Control of Robotic Manipulator Using Fixed-Time Method. Complex Intell. Syst. 2024, 10, 369–382. [Google Scholar] [CrossRef]
- Lee, J.; Chang, P.H.; Yu, B.; Jin, M. An Adaptive PID Control for Robot Manipulators Under Substantial Payload Variations. IEEE Access 2020, 8, 162261–162270. [Google Scholar] [CrossRef]
- Loucif, F.; Kechida, S.; Sebbagh, A. Whale Optimizer Algorithm to Tune PID Controller for the Trajectory Tracking Control of Robot Manipulator. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 1. [Google Scholar] [CrossRef]
- Chotikunnan, P.; Chotikunnan, R. Dual Design PID Controller for Robotic Manipulator Application. J. Robot. Control 2023, 4, 23–34. [Google Scholar] [CrossRef]
- Ahmed, A.S.; Kadhim, S.K. A Comparative Study Between Convolution and Optimal Backstepping Controller for Single Arm Pneumatic Artificial Muscles. J. Robot. Control 2022, 3, 769–778. [Google Scholar] [CrossRef]
- Pan, Y.; Wang, H.; Li, X.; Yu, H. Adaptive Command-Filtered Backstepping Control of Robot Arms with Compliant Actuators. IEEE Trans. Control Syst. Technol. 2017, 26, 1149–1156. [Google Scholar] [CrossRef]
- Baek, J.; Jin, M.; Han, S. A New Adaptive Sliding-Mode Control Scheme for Application to Robot Manipulators. IEEE Trans. Ind. Electron. 2016, 63, 3628–3637. [Google Scholar] [CrossRef]
- Ripamonti, F.; Orsini, L.; Resta, F. A Nonlinear Sliding Surface in Sliding Mode Control to Reduce Vibrations of a Three-Link Flexible Manipulator. J. Vib. Acoust. 2017, 139, 051005. [Google Scholar] [CrossRef]
- Pezzato, C.; Ferrari, R.; Corbato, C.H. A Novel Adaptive Controller for Robot Manipulators Based on Active Inference. IEEE Robot. Autom. Lett. 2020, 5, 2973–2980. [Google Scholar] [CrossRef]
- Huang, H.; Yang, C.; Chen, C.L.P. Optimal Robot–Environment Interaction Under Broad Fuzzy Neural Adaptive Control. IEEE Trans. Cybern. 2020, 51, 3824–3835. [Google Scholar] [CrossRef]
- Tang, Z.Q.; Heung, H.L.; Tong, K.Y.; Li, Z. Model-Based Online Learning and Adaptive Control for a “Human-Wearable Soft Robot” Integrated System. Int. J. Robot. Res. 2021, 40, 256–276. [Google Scholar] [CrossRef]
- Calinon, S. Gaussians on Riemannian Manifolds: Applications for Robot Learning and Adaptive Control. IEEE Robot. Autom. Mag. 2020, 27, 33–45. [Google Scholar] [CrossRef]
- Nubert, J.; Köhler, J.; Berenz, V.; Allgöwer, F.; Trimpe, S. Safe and Fast Tracking on a Robot Manipulator: Robust MPC and Neural Network Control. IEEE Robot. Autom. Lett. 2020, 5, 3050–3057. [Google Scholar] [CrossRef]
- Emmanuel Agbaraji, C.; Henrietta Udeani, U.; Chibueze Inyiama, H.; Chikodi Okezie, C. Robust Control for a 3DOF Articulated Robotic Manipulator Joint Torque Under Uncertainties. J. Eng. Res. Rep. 2020, 9, 1–3. [Google Scholar] [CrossRef]
- Van, M.; Ceglarek, D. Robust Fault Tolerant Control of Robot Manipulators with Global Fixed-Time Convergence. J. Frankl. Inst. 2021, 358, 699–722. [Google Scholar] [CrossRef]
- Dai, L.; Yu, Y.; Zhai, D.H.; Huang, T.; Xia, Y. Robust Model Predictive Tracking Control for Robot Manipulators with Disturbances. IEEE Trans. Ind. Electron. 2020, 68, 4288–4297. [Google Scholar] [CrossRef]
- Pan, Y.; Du, P.; Xue, H.; Lam, H.K. Singularity-Free Fixed-Time Fuzzy Control for Robotic Systems with User-Defined Performance. IEEE Trans. Fuzzy Syst. 2020, 29, 2388–2398. [Google Scholar] [CrossRef]
- Wang, Z.; Zou, L.; Su, X.; Luo, G.; Li, R.; Huang, Y. Hybrid Force/Position Control in Workspace of Robotic Manipulator in Uncertain Environments Based on Adaptive Fuzzy Control. Robot. Auton. Syst. 2021, 145, 103870. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, M.; Gao, C.; Wu, L. Output Feedback Command Filtered Fuzzy Controller Design for Uncertain Strict-Feedback Nonlinear Systems with Unmodeled Dynamics and Event-Triggered Strategy. Eng. Res. Express 2024, 6, 025315. [Google Scholar] [CrossRef]
- Urrea, C.; Kern, J.; Alvarado, J. Design and Evaluation of a New Fuzzy Control Algorithm Applied to a Manipulator Robot. Appl. Sci. 2020, 10, 7482. [Google Scholar] [CrossRef]
- Ha, S.; Liu, H.; Li, S.; Liu, A. Backstepping-Based Adaptive Fuzzy Synchronization Control for a Class of Fractional-Order Chaotic Systems with Input Saturation. Int. J. Fuzzy Syst. 2019, 21, 1571–1584. [Google Scholar] [CrossRef]
- Xu, F.; Tang, L.; Liu, Y.J. Tangent Barrier Lyapunov Function-Based Constrained Control of Flexible Manipulator System with Actuator Failure. Int. J. Robust Nonlinear Control 2021, 31, 8523–8536. [Google Scholar] [CrossRef]
- Yin, X.; Pan, L. Direct Adaptive Robust Tracking Control for 6 DOF Industrial Robot with Enhanced Accuracy. ISA Trans. 2018, 72, 178–184. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Ning, B.; Dong, H. Adaptive Neural Control with Intercepted Adaptation for Time-Delay Saturated Nonlinear Systems. Neural Comput. Appl. 2015, 26, 1849–1857. [Google Scholar] [CrossRef]
- Yu, C.; Xu, L.; Sun, H. Research on Manipulator Motion Control System Based on Preset Performance Control Algorithm. Int. Conf. Robot. Intell. Syst. 2020, 20, 28–32. [Google Scholar]
- Liu, G.; Sun, N.; Yang, T.; Fang, Y. Reinforcement Learning-Based Prescribed Performance Motion Control of Pneumatic Muscle Actuated Robotic Arms with Measurement Noises. IEEE Trans. Syst. Man Cybern. Syst. 2022, 53, 1801–1812. [Google Scholar] [CrossRef]
- Ma, H.; Zhou, Q.; Li, H.; Lu, R. Adaptive Prescribed Performance Control of a Flexible-Joint Robotic Manipulator with Dynamic Uncertainties. IEEE Trans. Cybern. 2021, 52, 12905–12915. [Google Scholar] [CrossRef]
- Gao, M.; Ding, L.; Jin, X. ELM-Based Adaptive Faster Fixed-Time Control of Robotic Manipulator Systems. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 4646–4658. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Y.; Hou, Y.; Li, H. Fixed-Time Sliding Mode Control for Uncertain Robot Manipulators. IEEE Access 2019, 7, 149750–149763. [Google Scholar] [CrossRef]
- Vo, A.T.; Truong, T.N.; Kang, H.J. An Adaptive Prescribed Performance Tracking Motion Control Methodology for Robotic Manipulators with Global Finite-Time Stability. Sensors 2022, 22, 7834. [Google Scholar] [CrossRef] [PubMed]
- Li, X.H.; Hu, L.Y. Prescribed Performance Finite-Time H∞ Tracking Control for a Class of p-Normal Form Nonlinear Systems. Acta Autom. Sin. 2021, 47, 2870–2880. [Google Scholar]
- Xu, Z.; Li, S.; Zhou, X.; Zhou, S.; Cheng, T.; Guan, Y. Dynamic Neural Networks for Motion-Force Control of Redundant Manipulators: An Optimization Perspective. IEEE Trans. Ind. Electron. 2020, 68, 1525–1536. [Google Scholar] [CrossRef]
- Shang, D.; Li, X.; Yin, M.; Li, F. Dynamic Modeling and Neural Network Compensation for Dual-Flexible Servo System with an Underactuated Hand. J. Frankl. Inst. 2023, 360, 10127–10164. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, W.; Li, L.; Li, Z. The Master Adaptive Impedance Control and Slave Adaptive Neural Network Control in Underwater Manipulator uncertainty teleoperation. Ocean Eng. 2018, 165, 465–479. [Google Scholar] [CrossRef]
- Zuo, Z.; Tian, B.; Defoort, M.; Ding, Z. Fixed-Time Consensus Tracking for Multiagent Systems with High-Order Integrator Dynamics. IEEE Trans. Autom. Control 2018, 63, 563–570. [Google Scholar] [CrossRef]
- Zheng, Z.; Xia, Y.; Fu, M. Attitude Stabilization of Rigid Spacecraft with Finite-Time Convergence. Int. J. Robust Nonlinear Control 2015, 21, 686–702. [Google Scholar]
- Jin, X. Adaptive Fixed-Time Control for MIMO Nonlinear Systems with Asymmetric Output Constraints Using Universal Barrier Functions. IEEE Trans. Autom. Control 2019, 64, 3046–3053. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Zhao, H.; Zhen, S.; Liu, X.; Zhang, J. Fixed-Time Adaptive Neural Network-Based Trajectory Tracking Control for Workspace Manipulators. Actuators 2024, 13, 252. https://doi.org/10.3390/act13070252
Chen X, Zhao H, Zhen S, Liu X, Zhang J. Fixed-Time Adaptive Neural Network-Based Trajectory Tracking Control for Workspace Manipulators. Actuators. 2024; 13(7):252. https://doi.org/10.3390/act13070252
Chicago/Turabian StyleChen, Xiaofei, Han Zhao, Shengchao Zhen, Xiaoxiao Liu, and Jinsi Zhang. 2024. "Fixed-Time Adaptive Neural Network-Based Trajectory Tracking Control for Workspace Manipulators" Actuators 13, no. 7: 252. https://doi.org/10.3390/act13070252
APA StyleChen, X., Zhao, H., Zhen, S., Liu, X., & Zhang, J. (2024). Fixed-Time Adaptive Neural Network-Based Trajectory Tracking Control for Workspace Manipulators. Actuators, 13(7), 252. https://doi.org/10.3390/act13070252