
Motion Control of a Hybrid Quadruped-Quadrotor Robot


Abstract
1. Introduction
- (1)
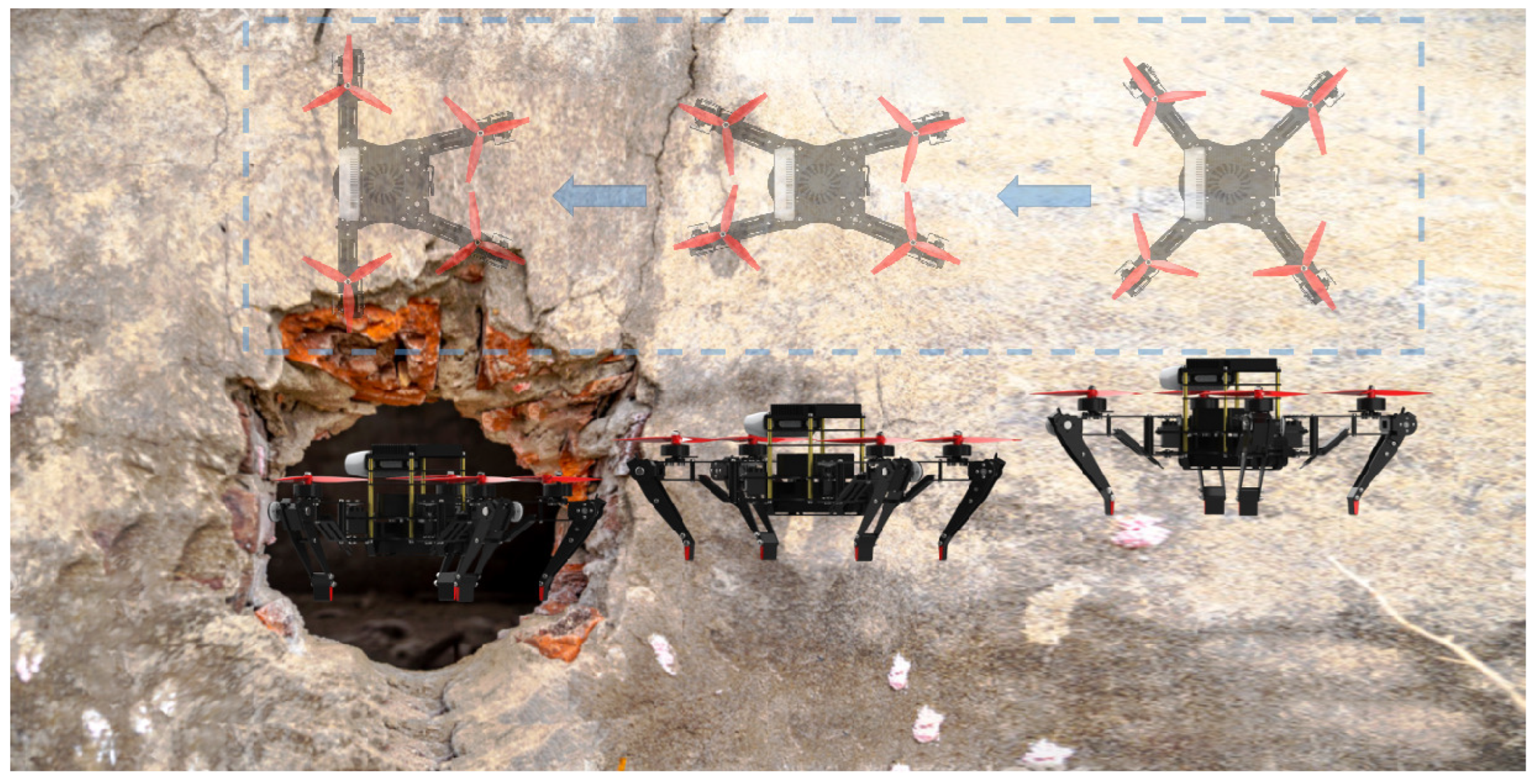
- A micro, lightweight, and integrated robot prototype that enables both crawling motion and morphing flight.
- (2)
- A hierarchical coordination control scheme consisting of a low-level locomotion controller and a high-level motion controller that provides hybrid air-ground robots with multimodal locomotion capabilities.
- (3)
- Implementing foundational experiments and comparisons on such a hybrid robotic system to address the challenge of practical applications.
2. System Overview
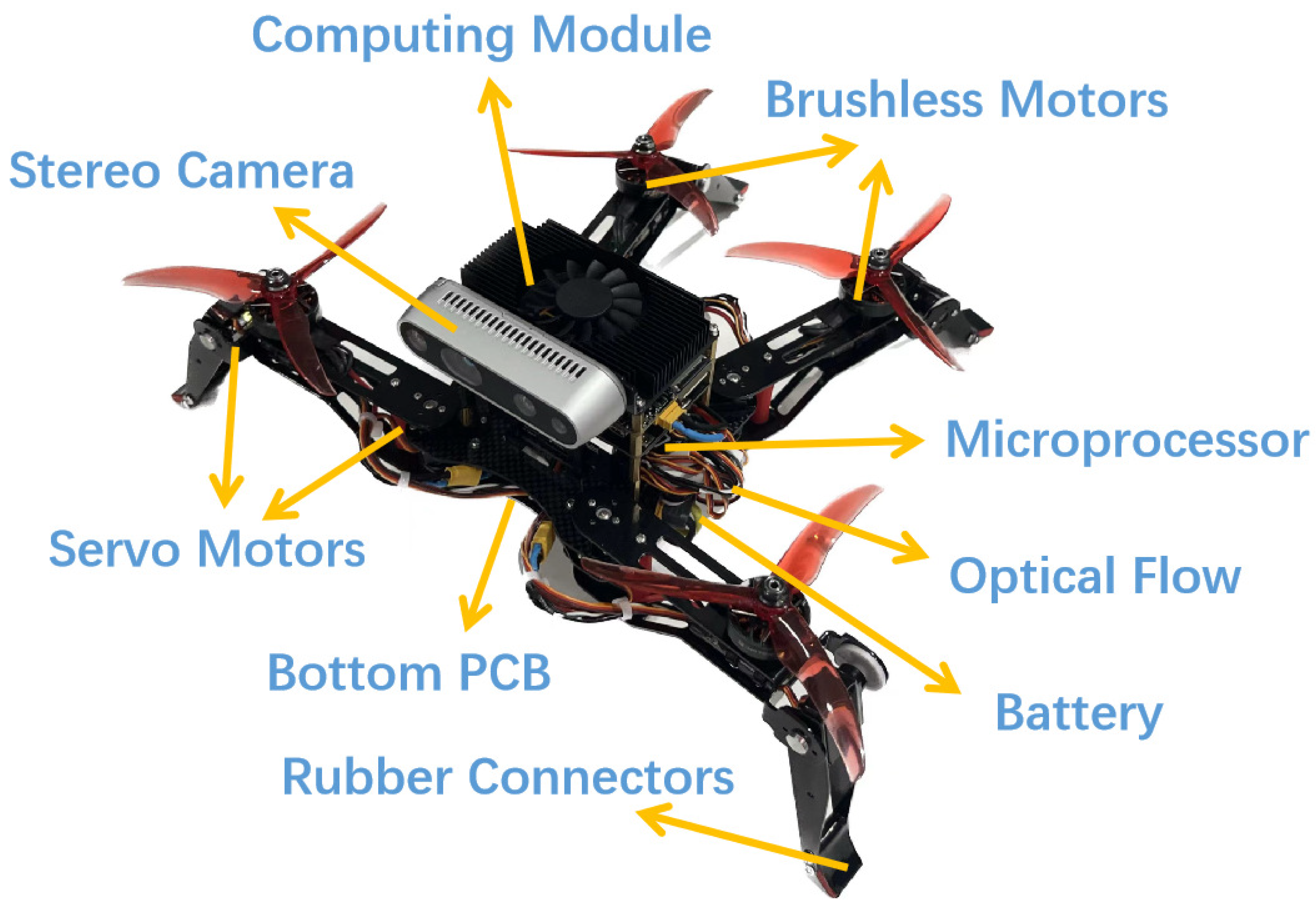
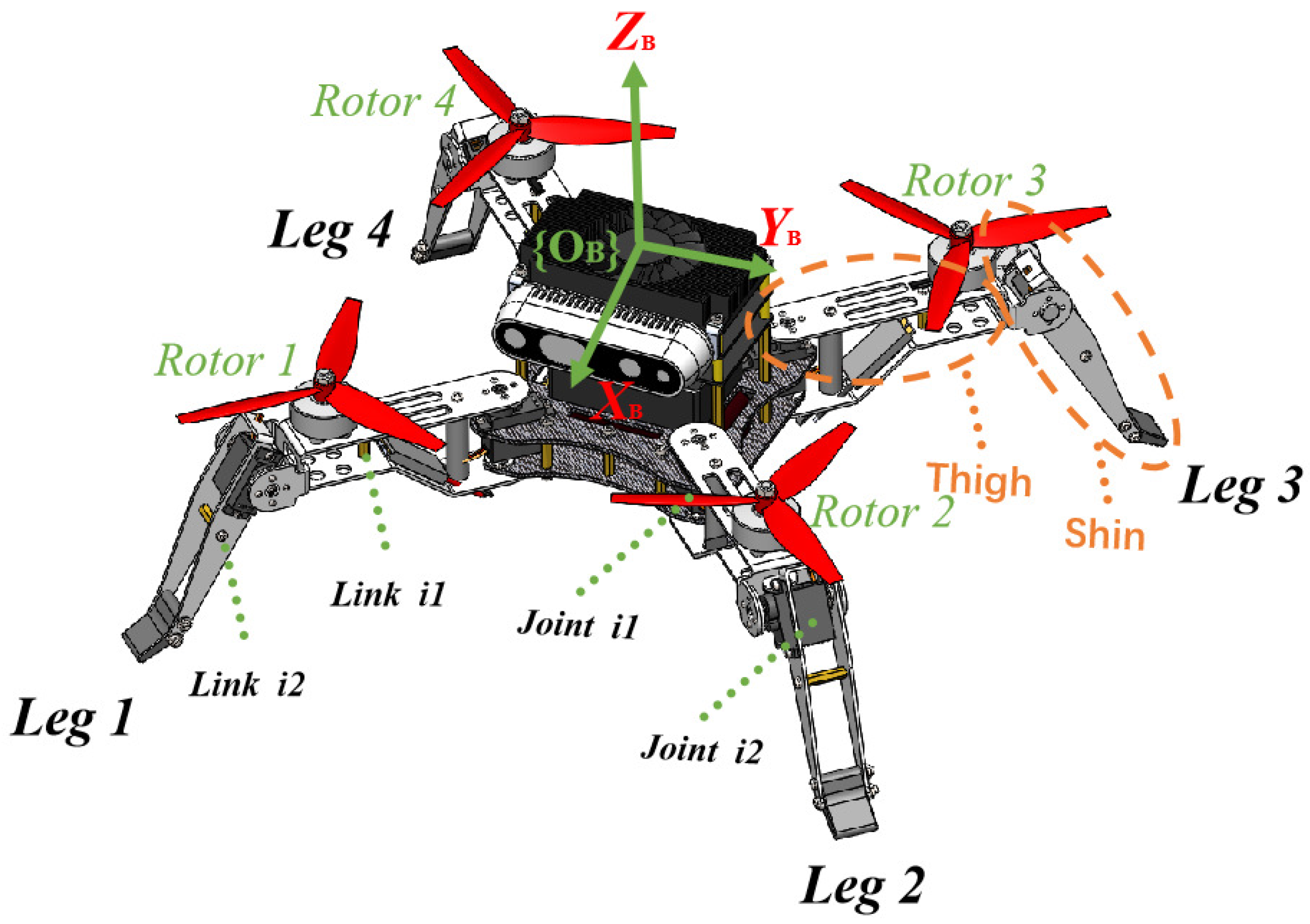
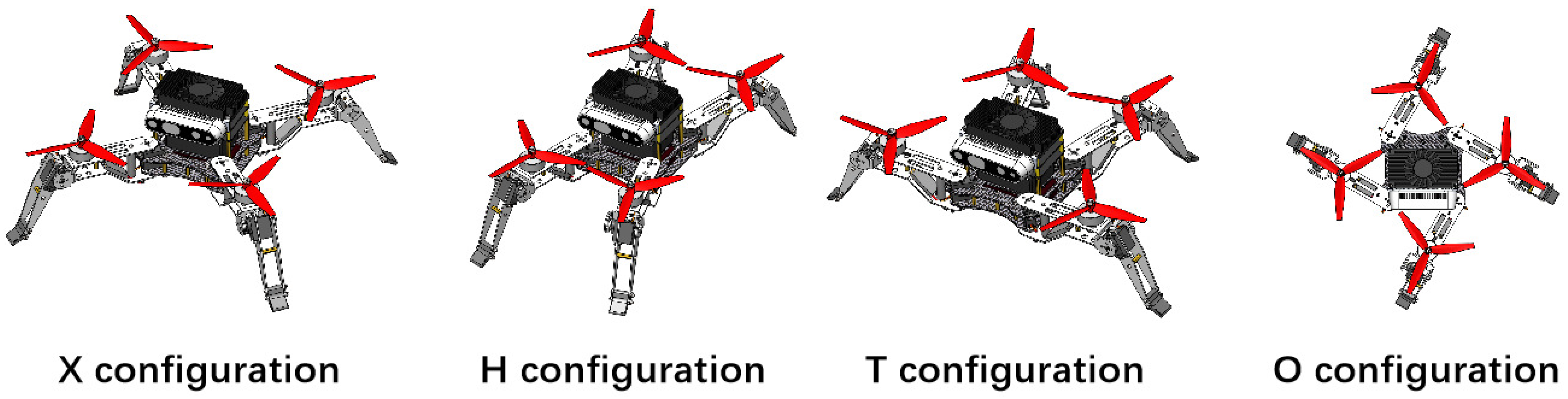
2.1. Robot Design
2.2. Modeling
2.2.1. Terrestrial Dynamics of Multi-Joint Torque
2.2.2. Aerial Dynamics of Multi-Rotor Thrust
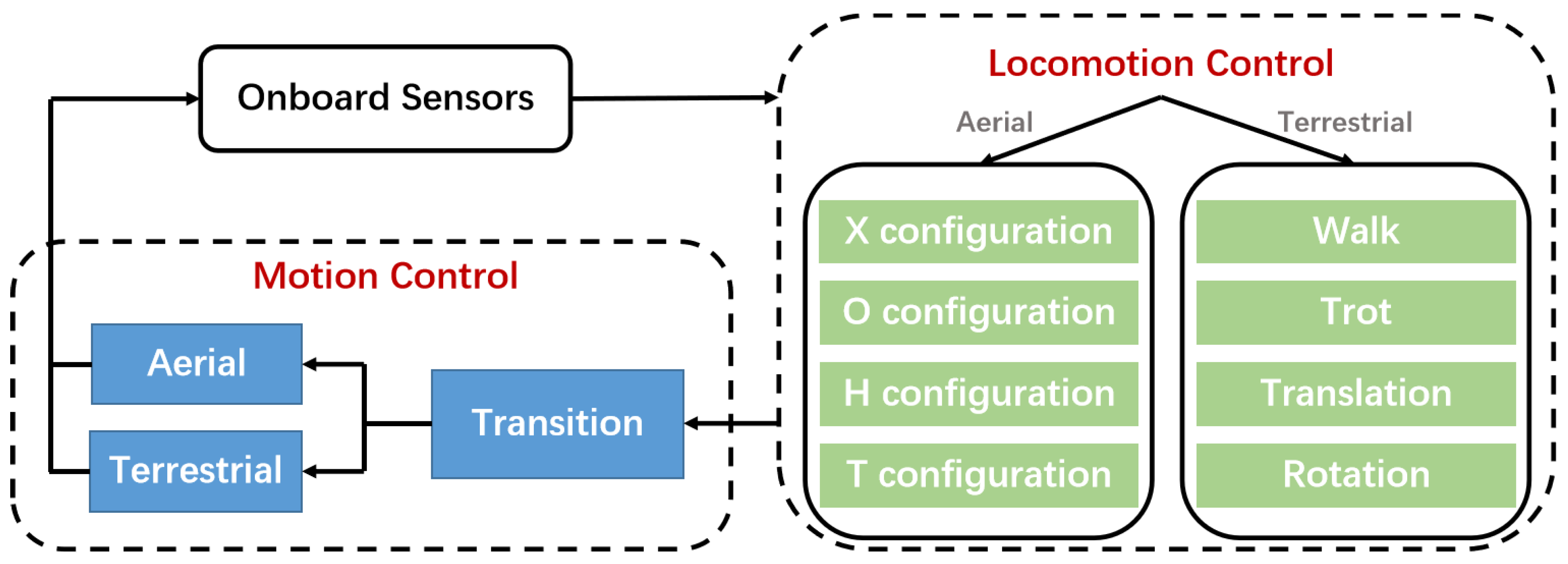
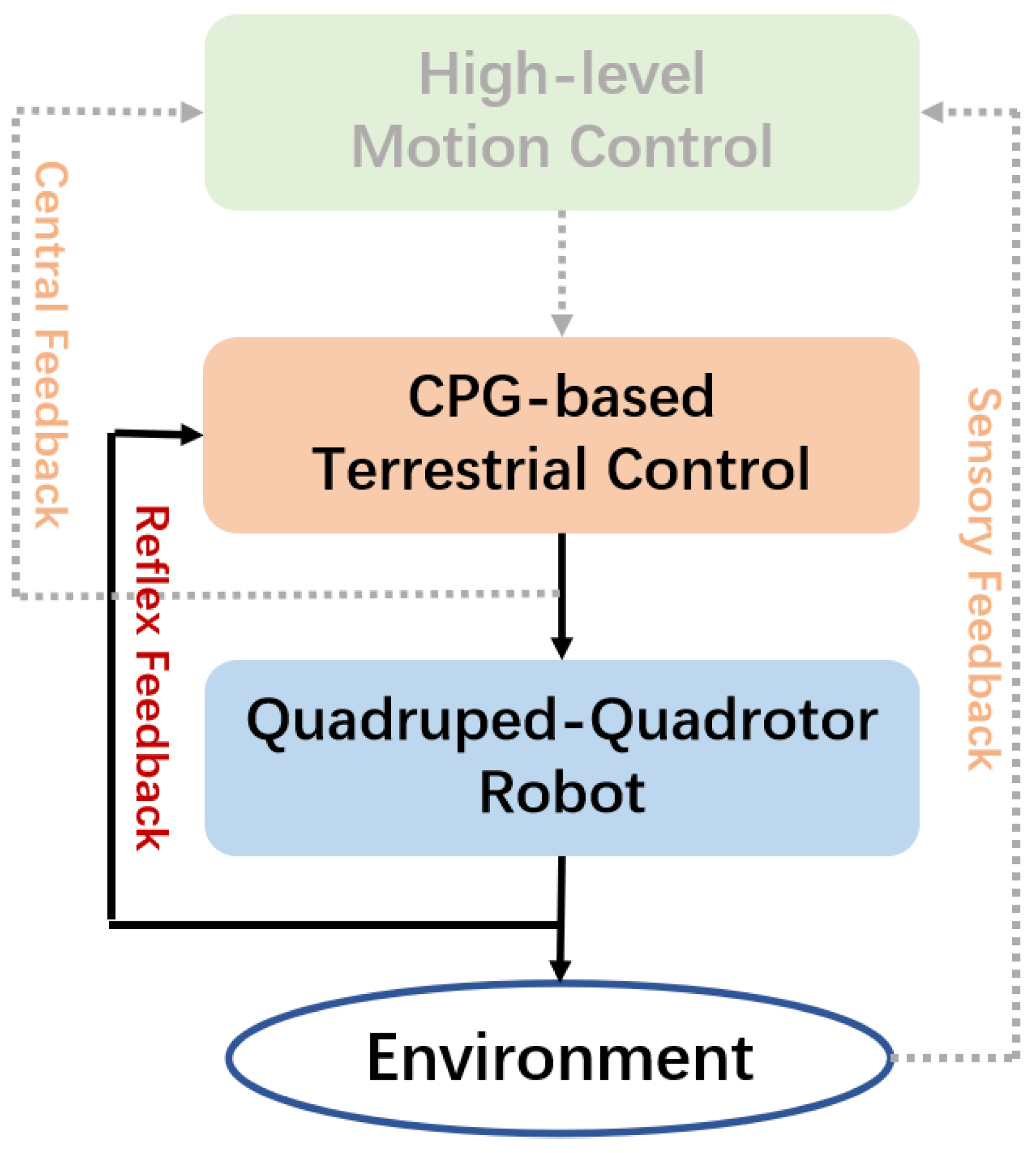
3. Hierarchical Coordination Control Scheme
3.1. Low-Level Locomotion Control
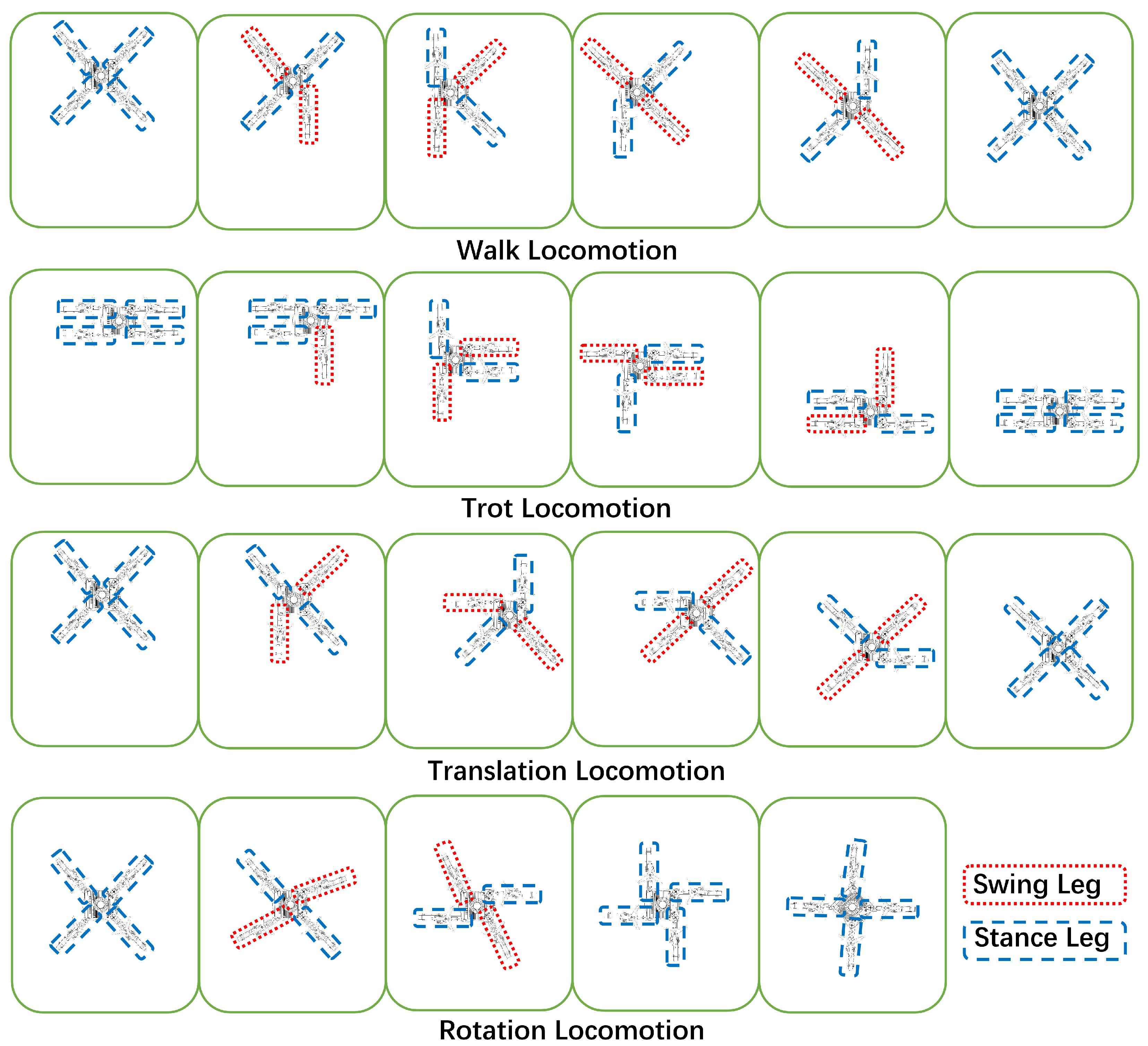
3.1.1. Terrestrial Locomotion Control
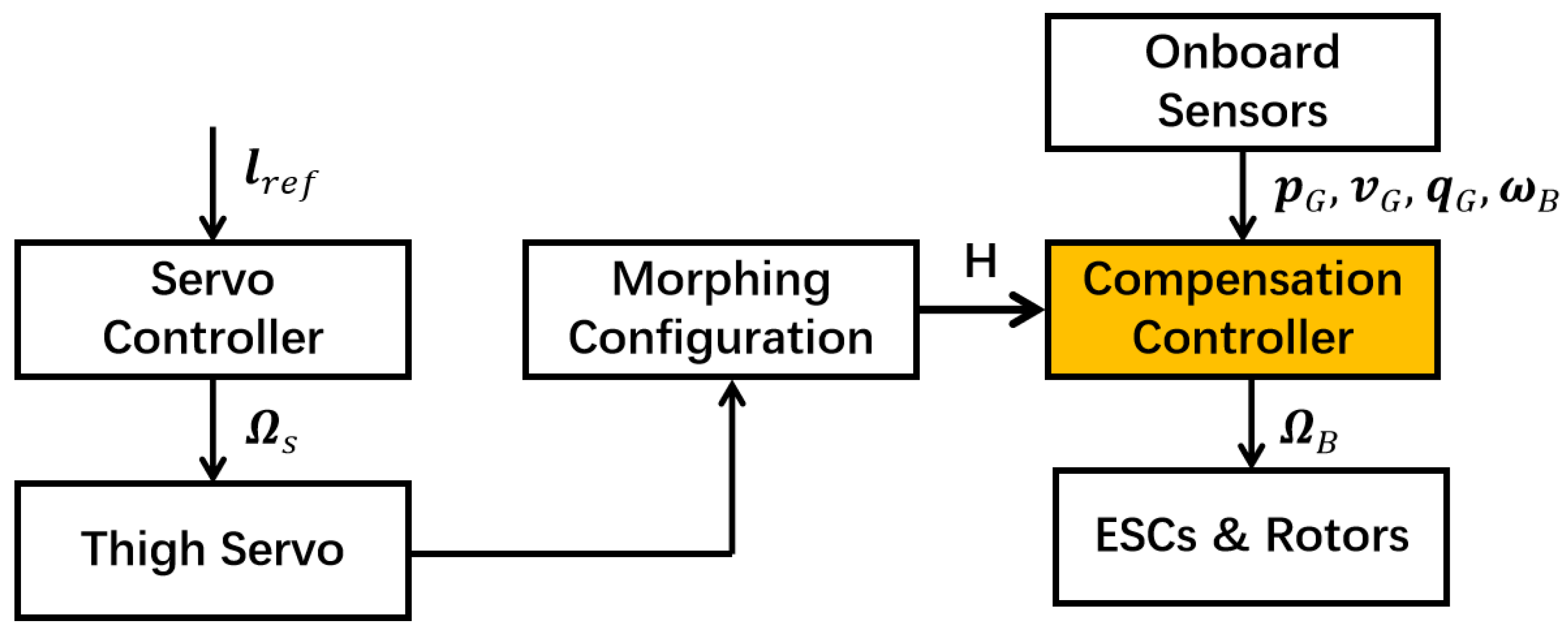
3.1.2. Aerial Locomotion Control
3.2. High-Level Motion Control
| Algorithm 1 The full finite-state machine control algorithm for terrestrial–aerial motion transition. |
|
4. Results
4.1. Simulations
4.1.1. Terrestrial CPG-Based Controller Verification
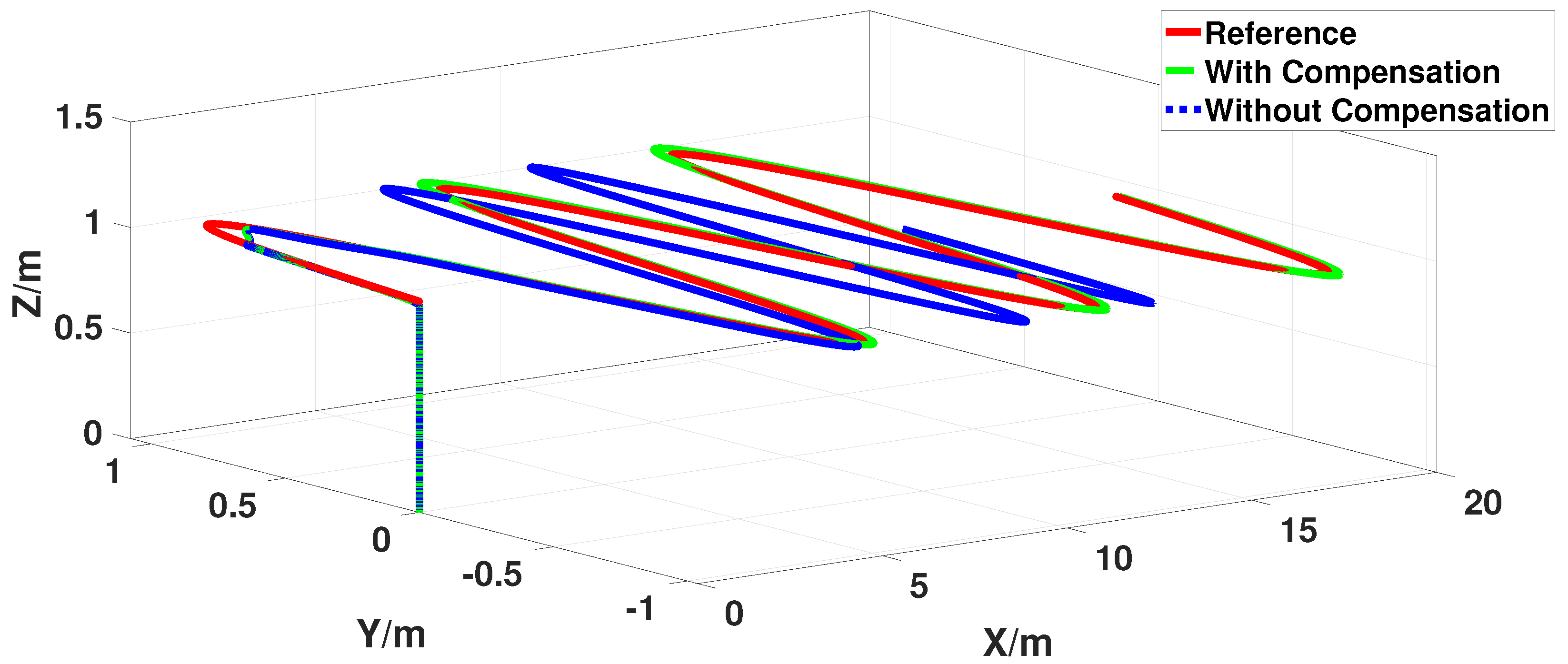
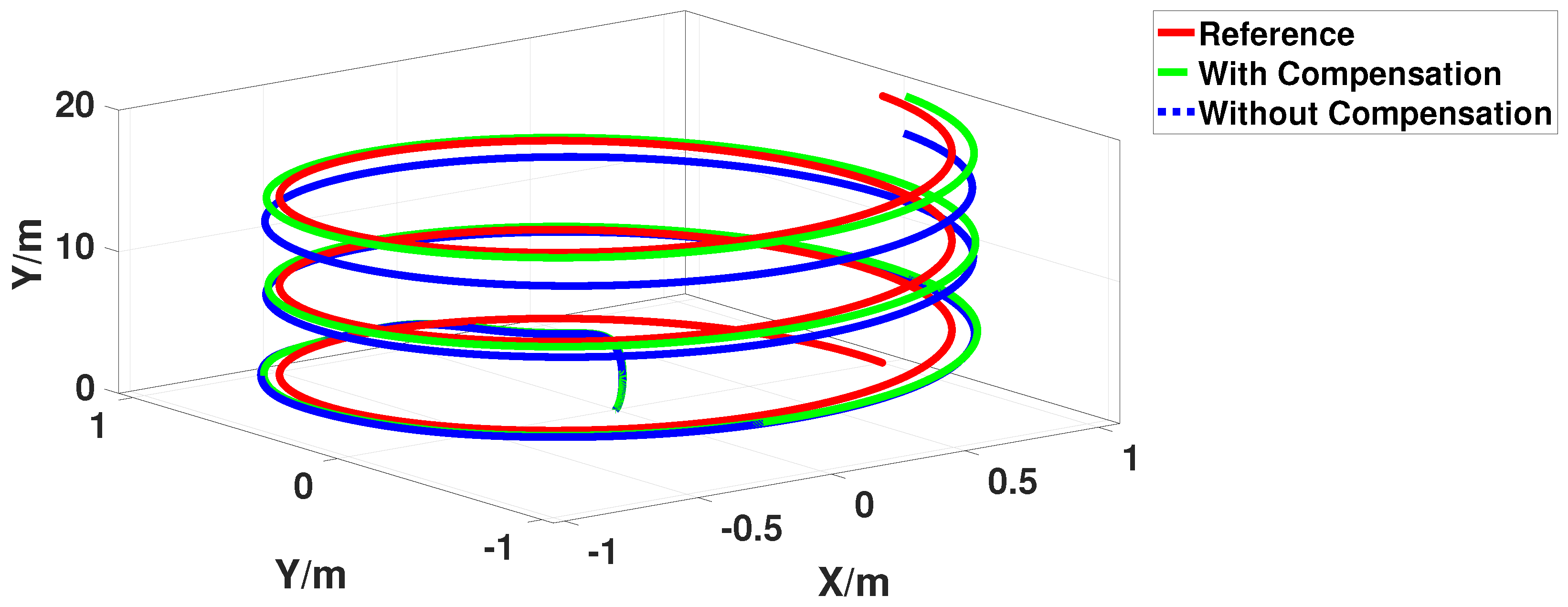
4.1.2. Aerial Compensation Controller Verification
4.2. Experiments
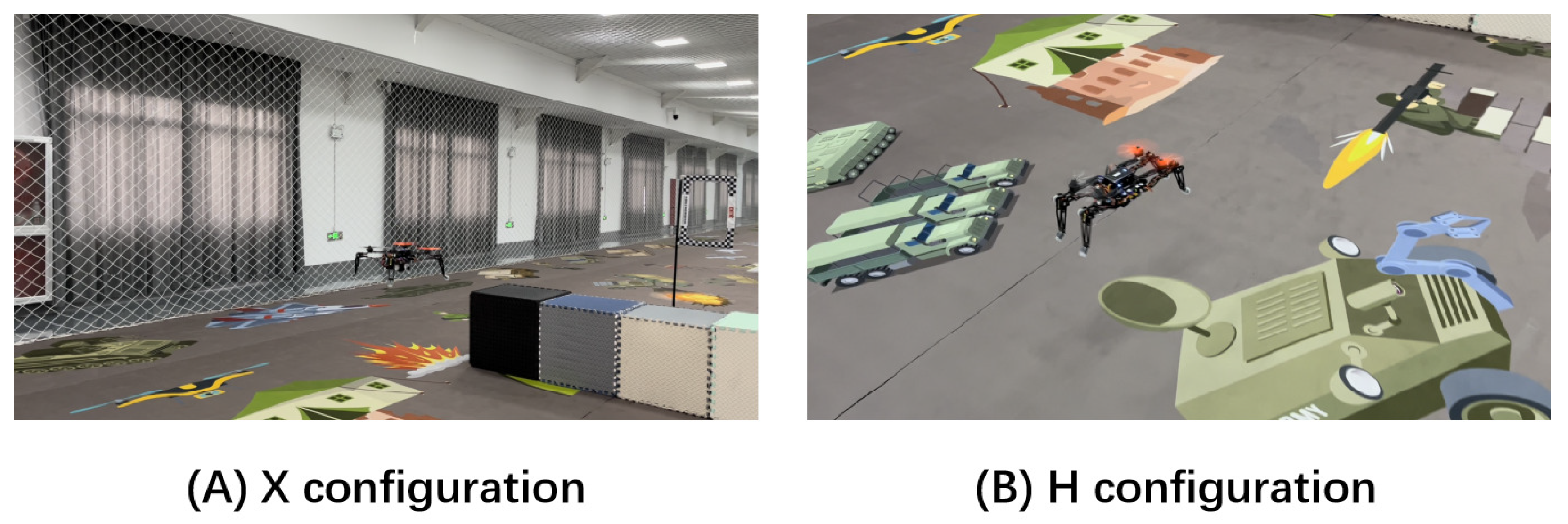
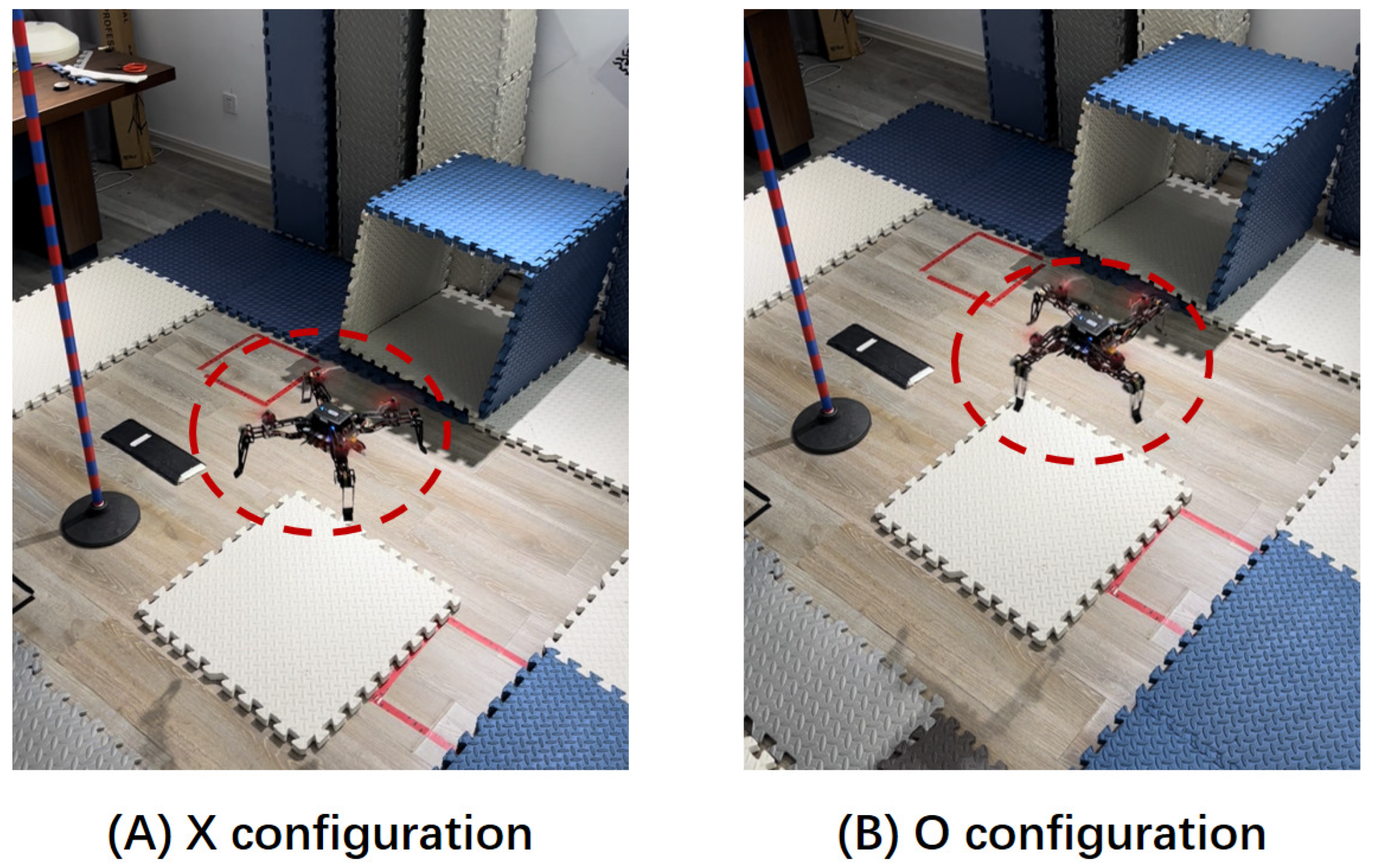
4.2.1. Crawling on Unknown Terrains
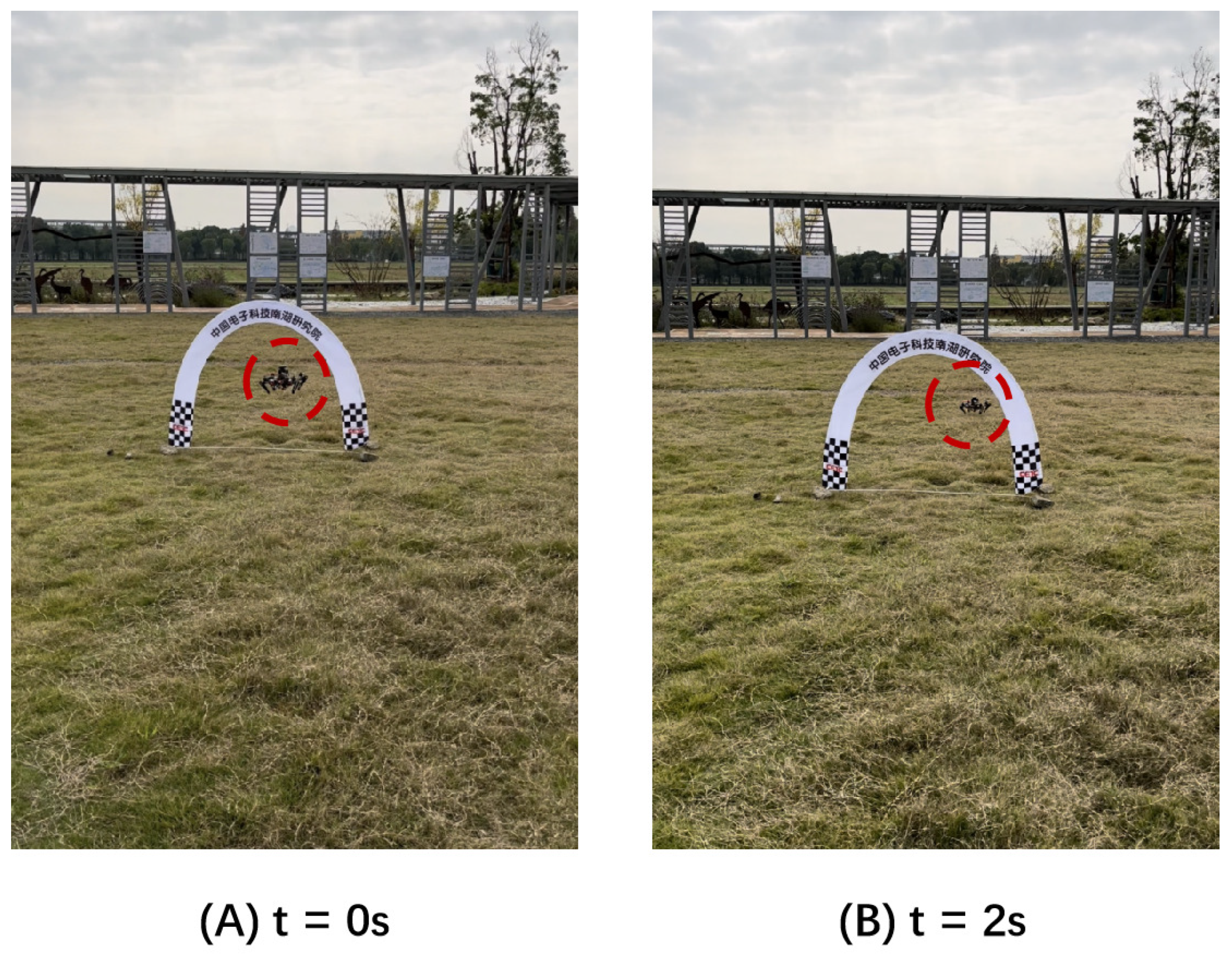
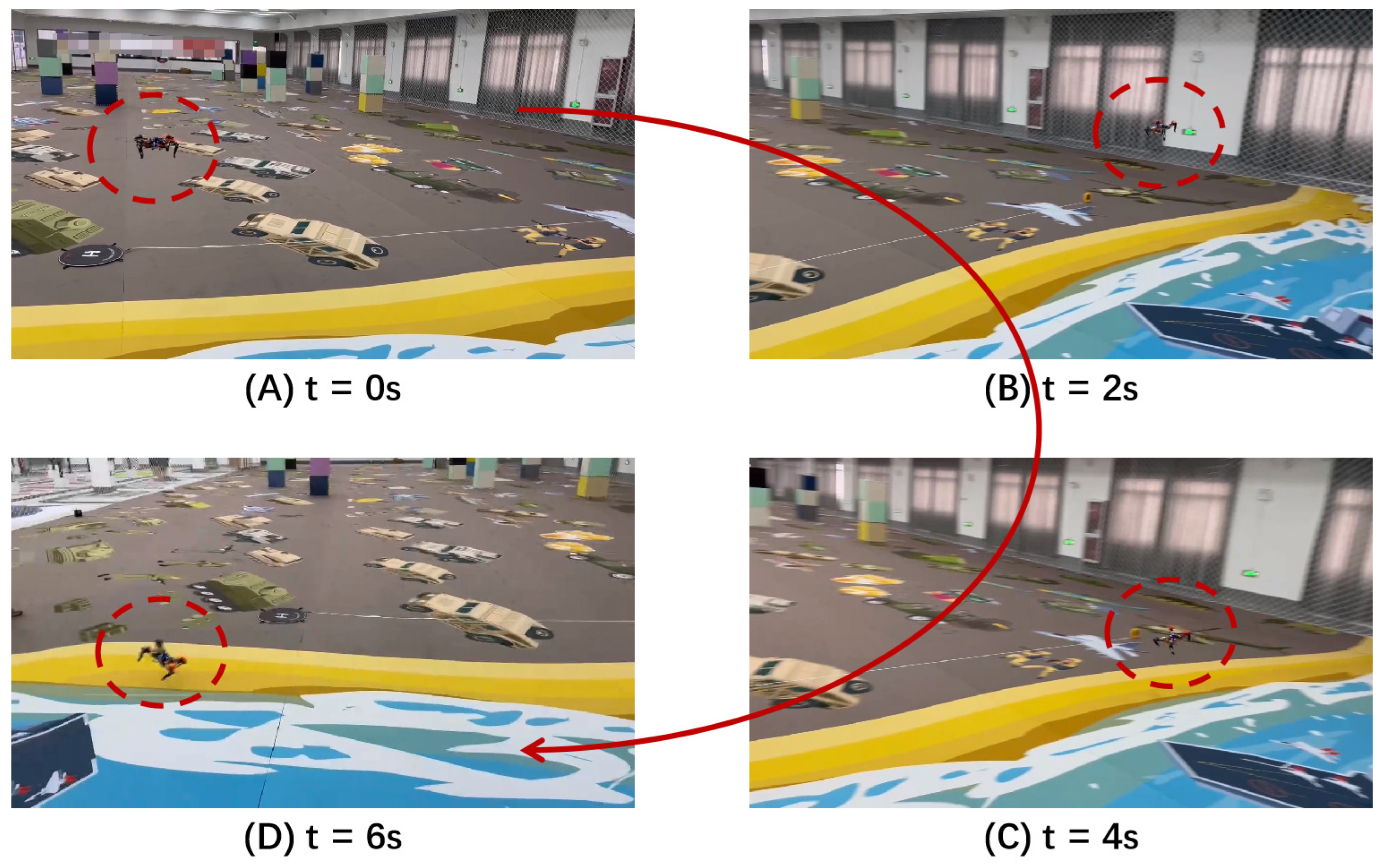
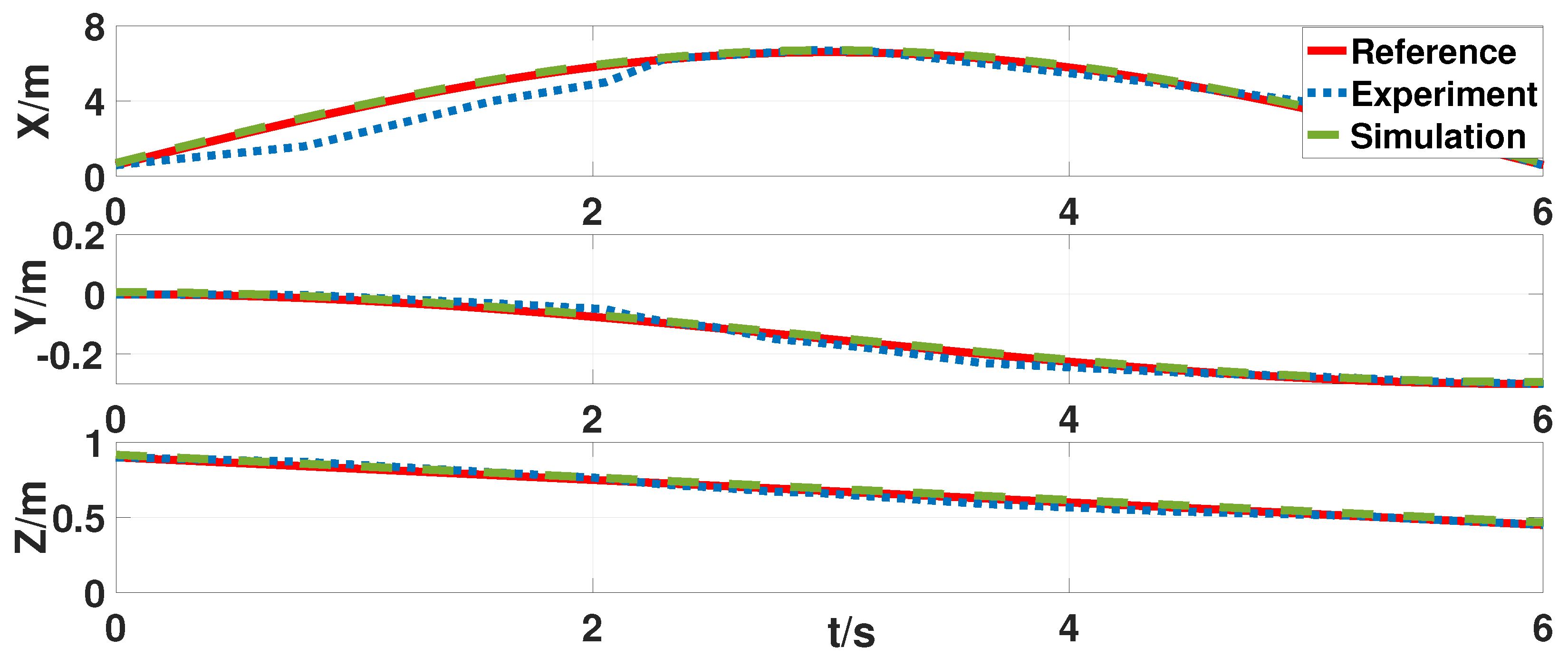
4.2.2. Morphing and Trajectory Tracking in Midair
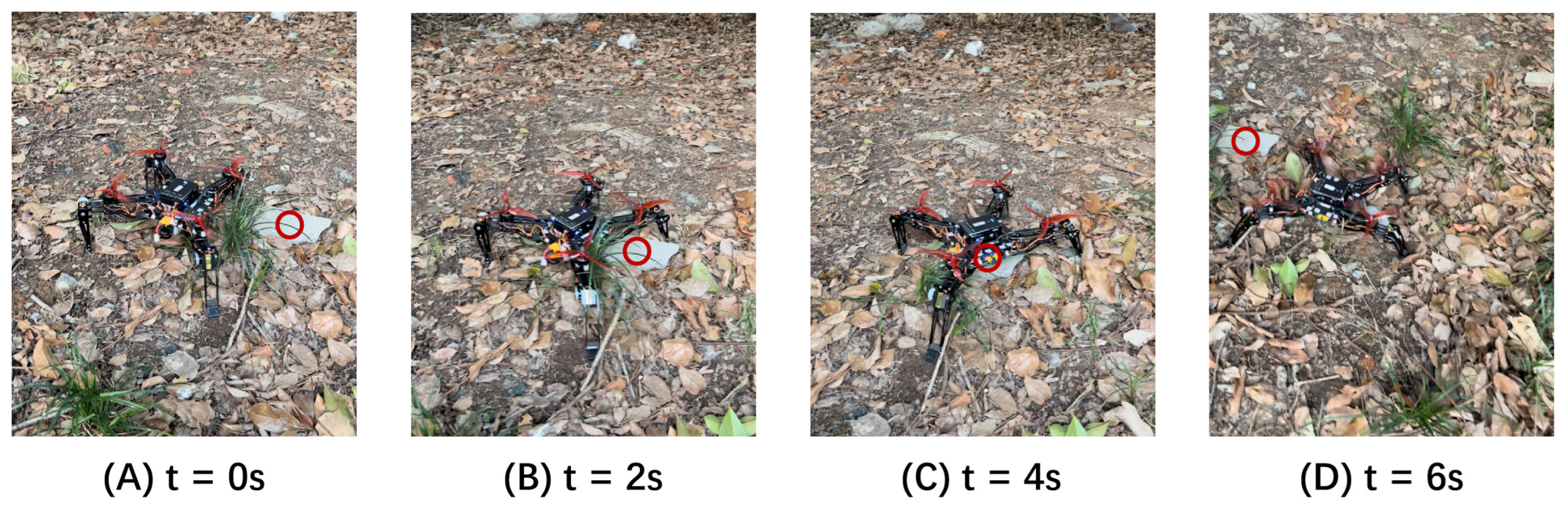
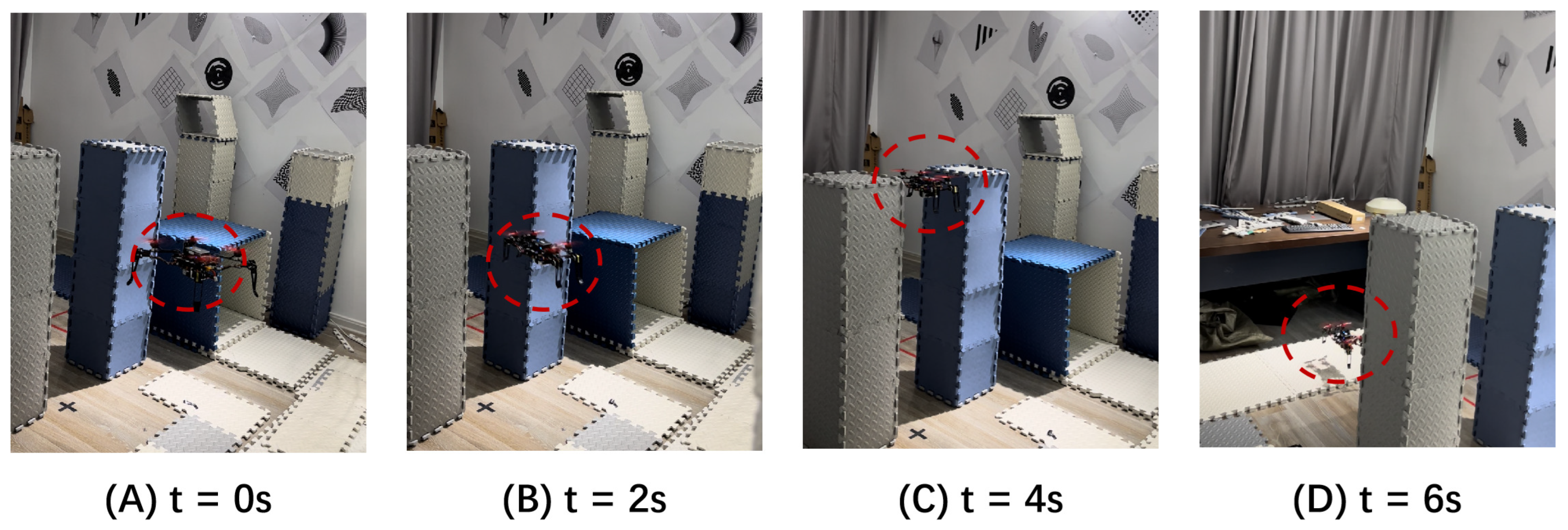
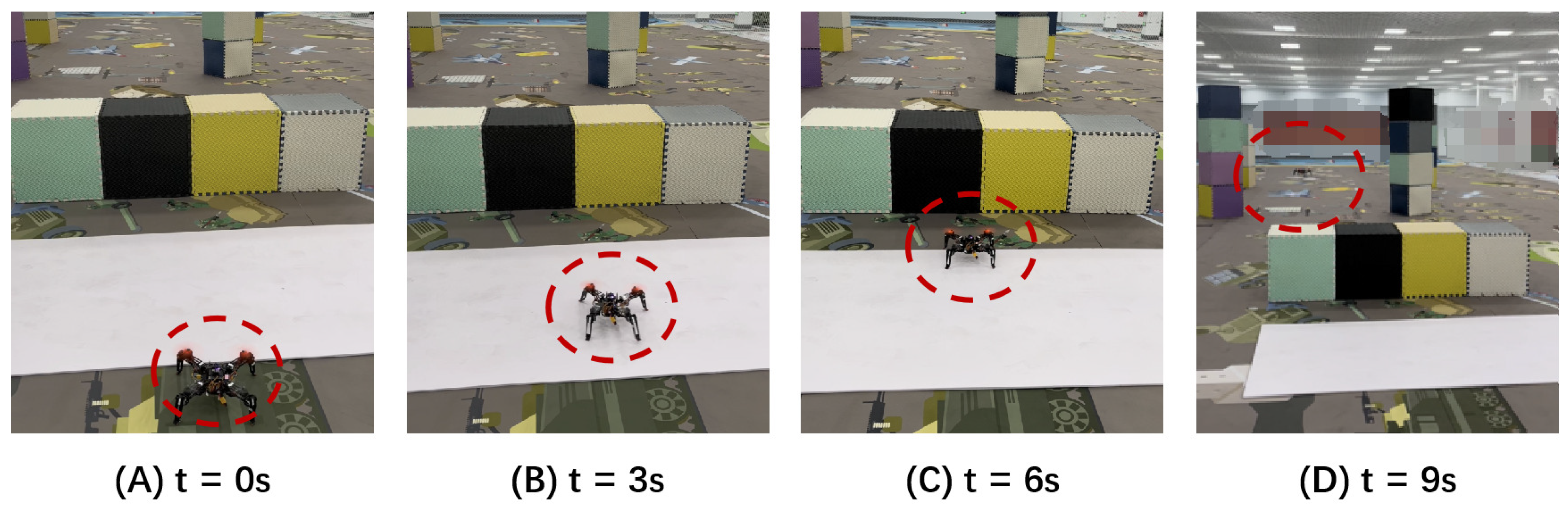
4.2.3. Adaptive Terrestrial–Aerial Motion Transition
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Deng, L.; Yang, B.; Dong, X.; Cui, Y.; Gao, Y.; Li, D.; Tu, Z. Self-Spin Enabled Docking and Detaching of a UAV-UGV System for Aerial-Terrestrial Amphibious and Independent Locomotion. IEEE Robot. Autom. Lett. 2023, 8, 2454–2461. [Google Scholar] [CrossRef]
- Baines, R.; Patiballa, S.K.; Booth, J.; Ramirez, L.; Sipple, T.; Garcia, A.; Fish, F.; Kramer-Bottiglio, R. Multi-environment robotic transitions through adaptive morphogenesis. Nature 2022, 610, 283–289. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Jiang, Z.; Xu, R.; Ji, X.; Zhang, L.; Qian, H. Design and Optimization of a Magnetic Catcher for UAV Landing on Disturbed Aquatic Surface Platforms. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), IEEE, Philadelphia, PA, USA, 23–27 May 2022; pp. 1162–1168. [Google Scholar]
- Li, L.; Wang, S.; Zhang, Y.; Song, S.; Wang, C.; Tan, S.; Zhao, W.; Wang, G.; Sun, W.; Yang, F.; et al. Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces. Sci. Robot. 2022, 7, eabm6695. [Google Scholar] [CrossRef]
- Pope, M.T.; Kimes, C.W.; Jiang, H.; Hawkes, E.W.; Estrada, M.A.; Kerst, C.F.; Roderick, W.R.; Han, A.K.; Christensen, D.L.; Cutkosky, M.R. A multimodal robot for perching and climbing on vertical outdoor surfaces. IEEE Trans. Robot. 2016, 33, 38–48. [Google Scholar] [CrossRef]
- Pan, N.; Jiang, J.; Zhang, R.; Xu, C.; Gao, F. Skywalker: A Compact and Agile Air-Ground Omnidirectional Vehicle. IEEE Robot. Autom. Lett. 2023, 8, 2534–2541. [Google Scholar] [CrossRef]
- Guetta, O.; Shachaf, D.; Katz, R.; Zarrouk, D. A novel wave-like crawling robot has excellent swimming capabilities. Bioinspiration Biomimetics 2023, 18, 26006. [Google Scholar] [CrossRef]
- Arif, M.A.; Zhu, A.; Mao, H.; Zhou, X.; Song, J.; Tu, Y.; Ma, P. Design of an Amphibious Spherical Robot Driven by Twin Eccentric Pendulums With Flywheel-Based Inertial Stabilization. IEEE/ASME Trans. Mechatron. 2023, 28, 2690–2702. [Google Scholar] [CrossRef]
- Kong, J.; Niu, S.; Lu, P.; Li, A.; Xiang, X.; Zhao, W.; Zhou, Z. Design of a Bio-inspired Water-ground-air Amphibious and Cross Domain Robot Platform. In Proceedings of the 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO), Jinghong, China, 5–9 December 2022; pp. 2177–2182. [Google Scholar]
- Tanaka, Y.; Shirai, Y.; Lin, X.; Schperberg, A.; Kato, H.; Swerdlow, A.; Kumagai, N.; Hong, D. Scaler: A tough versatile quadruped free-climber robot. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Kyoto, Japan, 23–27 October 2022; pp. 5632–5639. [Google Scholar]
- David, N.B.; Zarrouk, D. Design and analysis of FCSTAR, a hybrid flying and climbing sprawl tuned robot. IEEE Robot. Autom. Lett. 2021, 6, 6188–6195. [Google Scholar] [CrossRef]
- Bellegarda, G.; Ijspeert, A. CPG-RL: Learning Central Pattern Generators for Quadruped Locomotion. IEEE Robot. Autom. Lett. 2022, 7, 12547–12554. [Google Scholar] [CrossRef]
- Li, K.; Han, B.; Zhao, Y.; Zhu, C. Motion Planning and Simulation of Combined Land-Air Amphibious Robot. IOP Conf. Ser. Mater. Sci. Eng. 2018, 428, 12057. [Google Scholar] [CrossRef]
- Zhao, M.; Anzai, T.; Nishio, T. Design, Modeling and Control of a Quadruped Robot SPIDAR: Spherically Vectorable and Distributed Rotors Assisted Air-Ground Amphibious Quadruped Robot. arXiv 2023, arXiv:2301.04050. [Google Scholar] [CrossRef]
- Paul, H.; Miyazaki, R.; Kominami, T.; Ladig, R.; Shimonomura, K. A Versatile Aerial Manipulator Design and Realization of UAV Take-Off from a Rocking Unstable Surface. Appl. Sci. 2021, 11, 9157. [Google Scholar] [CrossRef]
- De Petris, P.; Khattak, S.; Dharmadhikari, M.; Waibel, G.; Nguyen, H.; Montenegro, M.; Khedekar, N.; Alexis, K.; Hutter, M. Marsupial Walking-and-Flying Robotic Deployment for Collaborative Exploration of Unknown Environments. arXiv 2022, arXiv:2205.05477. [Google Scholar]
- Kim, K.; Spieler, P.; Lupu, E.S.; Ramezani, A.; Chung, S.J. A bipedal walking robot that can fly, slackline, and skateboard. Sci. Robot. 2021, 6, eabf8136. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Wu, Y.; Zhang, L.; Xu, C.; Gao, F. TIE: An Autonomous and Adaptive Terrestrial-Aerial Quadrotor. arXiv 2021, arXiv:2109.04706. [Google Scholar]
- Sakaguchi, A.; Yamamoto, K. A Novel Quadrotor With a 3-Axis Deformable Frame Using Tilting Motions of Parallel Link Modules Without Thrust Loss. IEEE Robot. Autom. Lett. 2022, 7, 9581–9588. [Google Scholar] [CrossRef]
- Roy, S.S.; Pratihar, D.K. Kinematics, Dynamics and Power Consumption Analyses for Turning Motion of a Six-Legged Robot. J. Intell. Robot. Syst. 2014, 74, 663–688. [Google Scholar] [CrossRef]
- Penicka, R.; Song, Y.; Kaufmann, E.; Scaramuzza, D. Learning minimum-time flight in cluttered environments. IEEE Robot. Autom. Lett. 2022, 7, 7209–7216. [Google Scholar] [CrossRef]
- Wu, Y.; Yang, F.; Wang, Z.; Wang, K.; Cao, Y.; Xu, C.; Gao, F. Ring-Rotor: A Novel Retractable Ring-Shaped Quadrotor With Aerial Grasping and Transportation Capability. IEEE Robot. Autom. Lett. 2023, 8, 2126–2133. [Google Scholar] [CrossRef]
- Ijspeert, A.J.; Crespi, A.; Ryczko, D.; Cabelguen, J.M. From Swimming to Walking with a Salamander Robot Driven by a Spinal Cord Model. Science 2007, 315, 1416–1420. [Google Scholar] [CrossRef]
- Yu, H.; Gao, H.; Deng, Z. Enhancing Adaptability with Local Reactive Behaviors for Hexapod Walking Robot via Sensory Feedback Integrated Central Pattern Generator. Robot. Auton. Syst. 2020, 124, 103401. [Google Scholar] [CrossRef]
- Lipeng, Y.; Bing, L. Research on Gait Switching Control of Quadruped Robot Based on Dynamic and Static Combination. IEEE Access 2023, 11, 14073–14088. [Google Scholar] [CrossRef]
- Seo, K.; Chung, S.J.; Slotine, J.J.E. CPG-Based Control of a Turtle-like Underwater Vehicle. Auton. Robot. 2010, 28, 247–269. [Google Scholar] [CrossRef]
- Campos, R.; Matos, V.; Santos, C. Hexapod Locomotion: A Nonlinear Dynamical Systems Approach. In Proceedings of the 2010 36th Annual Conference on IEEE Industrial Electronics Society (IECON), Glendale, AZ, USA, 7–10 November 2010; pp. 1546–1551. [Google Scholar] [CrossRef]
- Fabris, A.; Kleber, K.; Falanga, D.; Scaramuzza, D. Geometry-aware compensation scheme for morphing drones. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Xi’an, China, 30 May–5 June 2021; pp. 592–598. [Google Scholar]
- Yoon, S.; Diaz, P.V.; Boyd, D.D., Jr.; Chan, W.M.; Theodore, C.R. Computational aerodynamic modeling of small quadcopter vehicles. In Proceedings of the American Helicopter Society (AHS) 73rd Annual Forum, Fort Worth, TX, USA, 9–11 May 2017. [Google Scholar]
- Ouyang, W.; Chi, H.; Pang, J.; Liang, W.; Ren, Q. Adaptive locomotion control of a hexapod robot via bio-inspired learning. Front. Neurorobotics 2021, 15, 627157. [Google Scholar] [CrossRef] [PubMed]
- Lin, J.; Zhang, R.; Pan, N.; Xu, C.; Gao, F. Skater: A Novel Bi-modal Bi-copter Robot for Adaptive Locomotion in Air and Diverse Terrain. arXiv 2024, arXiv:2403.01991. [Google Scholar] [CrossRef]
- Falanga, D.; Kleber, K.; Mintchev, S.; Floreano, D.; Scaramuzza, D. The foldable drone: A morphing quadrotor that can squeeze and fly. IEEE Robot. Autom. Lett. 2018, 4, 209–216. [Google Scholar] [CrossRef]
- Luo, Y.; Yu, H.; Zhang, H.; Zhou, Y. A Novel Newton—Euler Method-Based Nonlinear Anti-Swing Control for a Quadrotor UAV Carrying a Slung Load. IEEE Trans. Syst. Man, Cybern. Syst. 2024, 54, 2266–2275. [Google Scholar] [CrossRef]
- Yu, D.; Ma, S.; Liu, Y.J.; Wang, Z.; Chen, C.P. Finite-time adaptive fuzzy backstepping control for quadrotor UAV with stochastic disturbance. IEEE Trans. Autom. Sci. Eng. 2023, 21, 1335–1345. [Google Scholar] [CrossRef]
- Feng, S.; Zeng, L.; Liu, J.; Yang, Y.; Song, W. Multi-UAVs Collaborative Path Planning in the Cramped Environment. IEEE/CAA J. Autom. Sin. 2024, 11, 529–538. [Google Scholar] [CrossRef]
- Madruga, S.P.; Tavares, A.H.; Luiz, S.O.; do Nascimento, T.P.; Lima, A.M.N. Aerodynamic effects compensation on multi-rotor UAVs based on a neural network control allocation approach. IEEE/CAA J. Autom. Sin. 2021, 9, 295–312. [Google Scholar] [CrossRef]
- Yang, L.; Li, B.; Li, W.; Brand, H.; Jiang, B.; Xiao, J. Concrete defects inspection and 3D mapping using CityFlyer quadrotor robot. IEEE/CAA J. Autom. Sin. 2020, 7, 991–1002. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Prototype | ||
|---|---|---|---|
| Value | Unit | ||
| Total | weight | 1.1 | kg |
| height | 14.7 | cm | |
| max crawl time | 30 | min | |
| max flight time | 10 | min | |
| Servo Motor | weight | 13 | g |
| number | 8 | ∖ | |
| Battery | weight | 235 | g |
| capacity | 2300 | mAh | |
| Thigh | weight | 19 | g |
| length | 11 | cm | |
| Shin | weight | 22 | g |
| length | 9.5 | cm | |
| Body Dimension | length | 10 | cm |
| width | 10 | cm | |
| Original Dimension | length | 26 | cm |
| width | 26 | cm | |
| Morphing Dimension | length | 20 | cm |
| width | 20 | cm | |
| Leg i | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Joint j | ||||
|---|---|---|---|---|
| 1 | 0 | |||
| 2 | 0 | 0 |
| Name | Mass | Minimum Dimensions (L × W × H) | Environmental Adaptability | ||
|---|---|---|---|---|---|
| Terrestrial | Aerial | Foldable | |||
| The proposed QQR | 1.1 kg | 20 × 20 × 14.7 cm | Yes | Yes | Yes |
| The TIE [18] | 0.8477 kg | 28 × 25 × 25 cm | Yes | Yes | No |
| The Ring-Rotor [22] | 1.665 kg | 28.4 × 28.4 × - cm | No | Yes | Yes |
| The Skater [31] | 0.835 kg | 18 × 30 × 30 cm | Yes | Yes | No |
| The Foldable Drone [32] | 0.580 kg | 47 cm (diagonal) | No | Yes | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouyang, W.; Chi, H.; Lu, L.; Wang, C.; Ren, Q. Motion Control of a Hybrid Quadruped-Quadrotor Robot. Actuators 2024, 13, 215. https://doi.org/10.3390/act13060215
Ouyang W, Chi H, Lu L, Wang C, Ren Q. Motion Control of a Hybrid Quadruped-Quadrotor Robot. Actuators. 2024; 13(6):215. https://doi.org/10.3390/act13060215
Chicago/Turabian StyleOuyang, Wenjuan, Haozhen Chi, Leifeng Lu, Chao Wang, and Qinyuan Ren. 2024. "Motion Control of a Hybrid Quadruped-Quadrotor Robot" Actuators 13, no. 6: 215. https://doi.org/10.3390/act13060215
APA StyleOuyang, W., Chi, H., Lu, L., Wang, C., & Ren, Q. (2024). Motion Control of a Hybrid Quadruped-Quadrotor Robot. Actuators, 13(6), 215. https://doi.org/10.3390/act13060215