
Design and Implementation of an



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Output Feedback Proportional Adaptive Controller
Problem Formulation
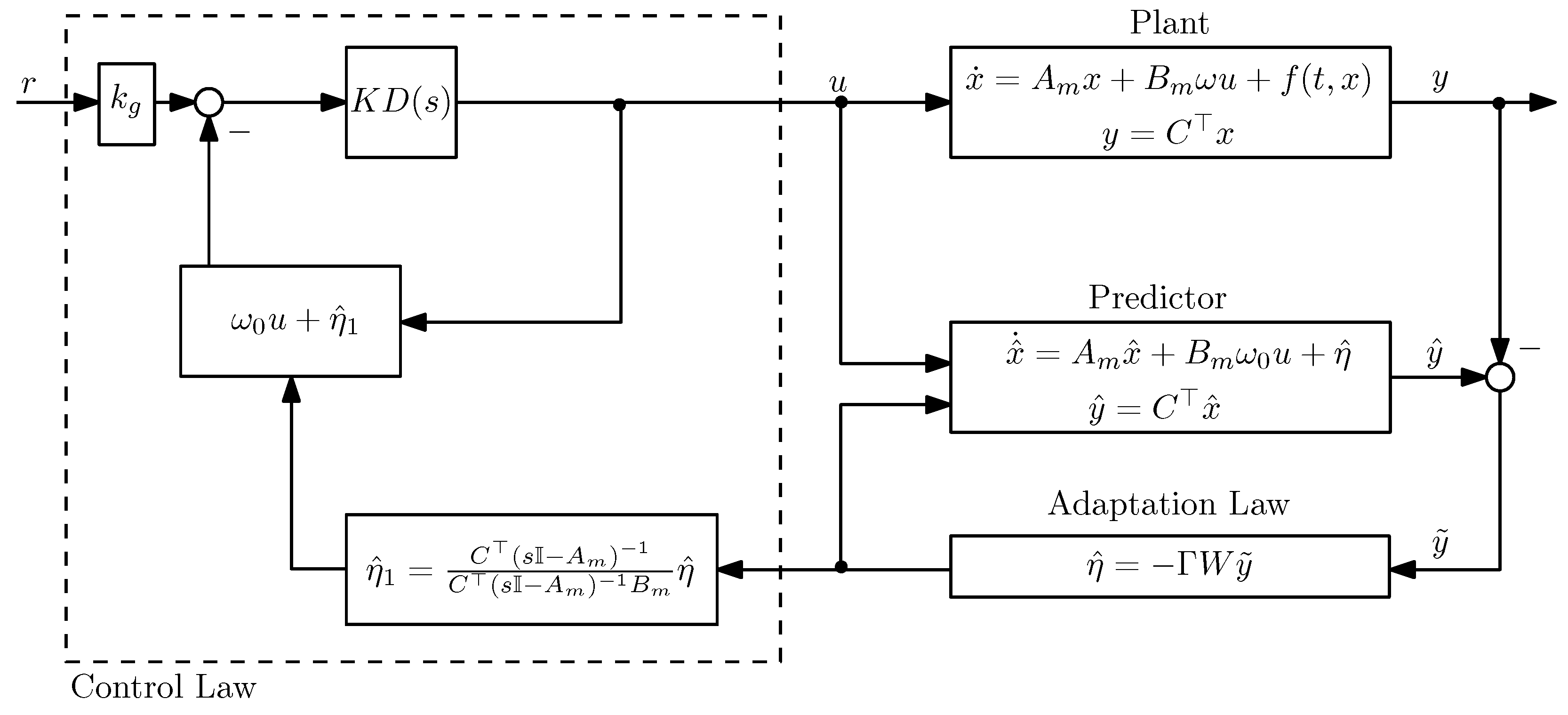
Control Architecture
3. Controller Analysis
- The reference model resulting from perfect knowledge of the uncertainties and a corresponding non-adaptive controller is stable, subject to some conditions involving the filter.
- The prediction error, i.e., the error between the state of the plant and that of the state predictors, is bounded.
- The difference between the state/input of the system and those of the reference system is proportional to the prediction error.
3.1. Reference System Analysis
3.2. Estimation Error Analysis
3.3. Performance Bounds Analysis
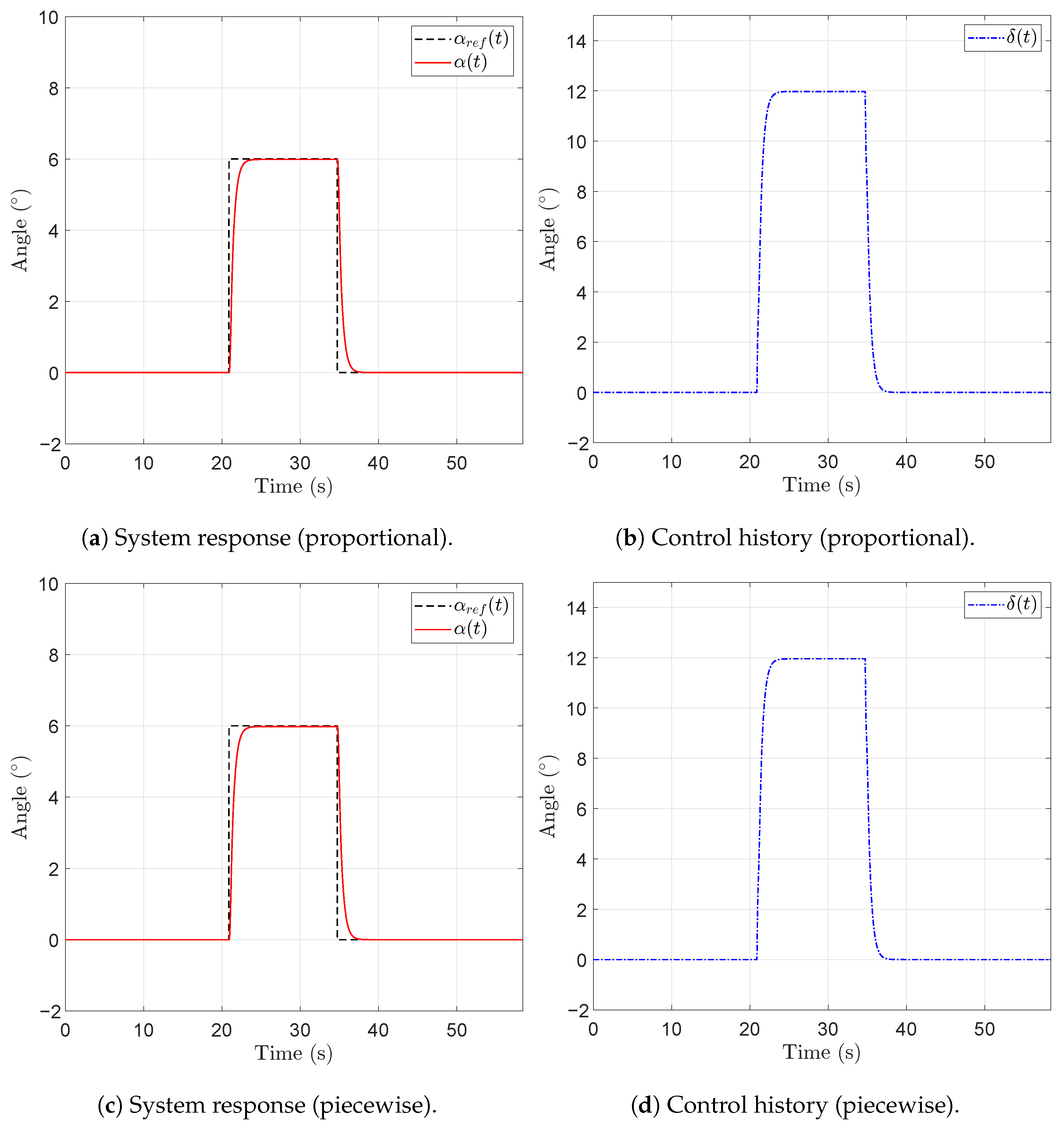
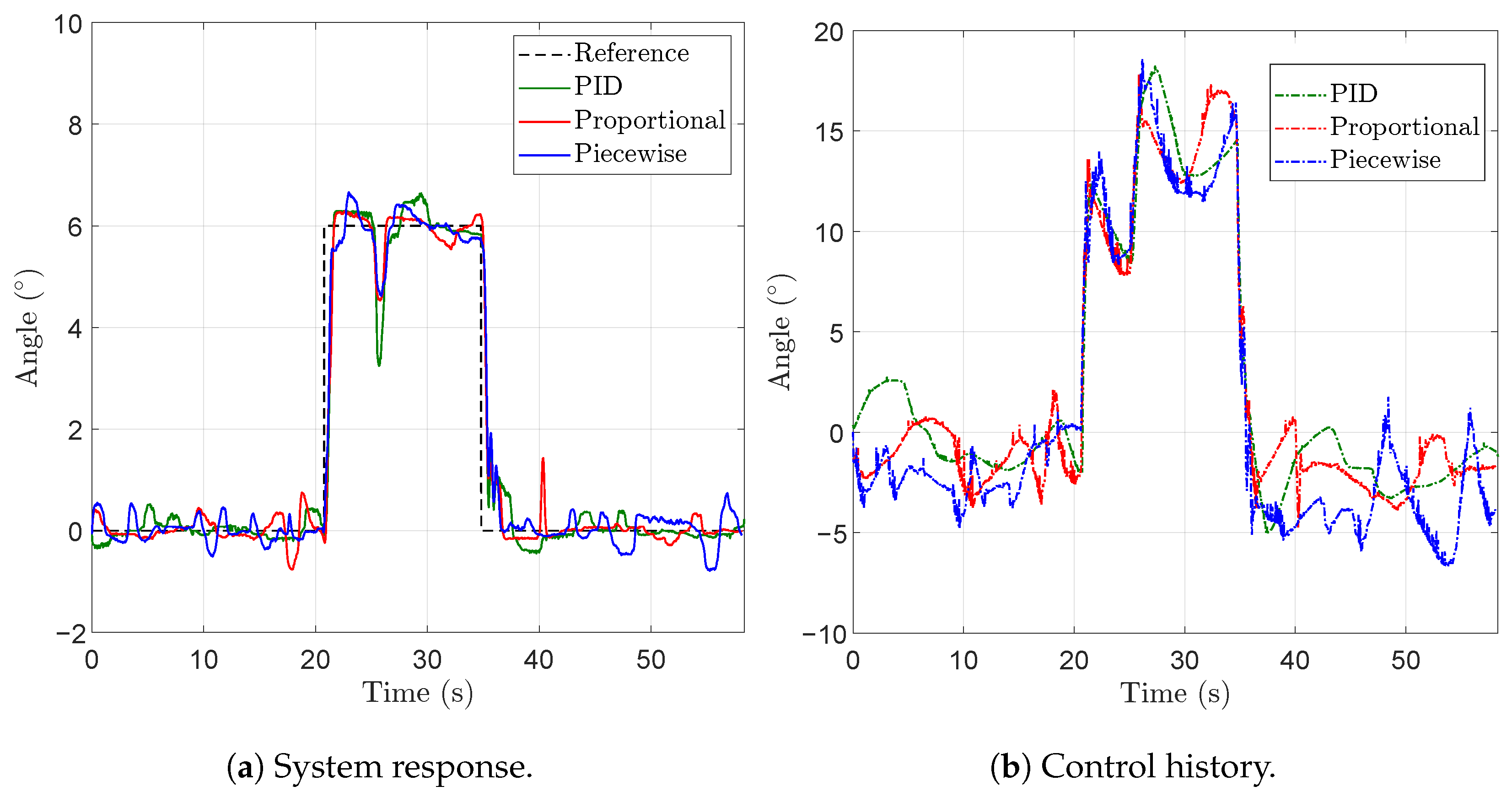
4. Simulation Results
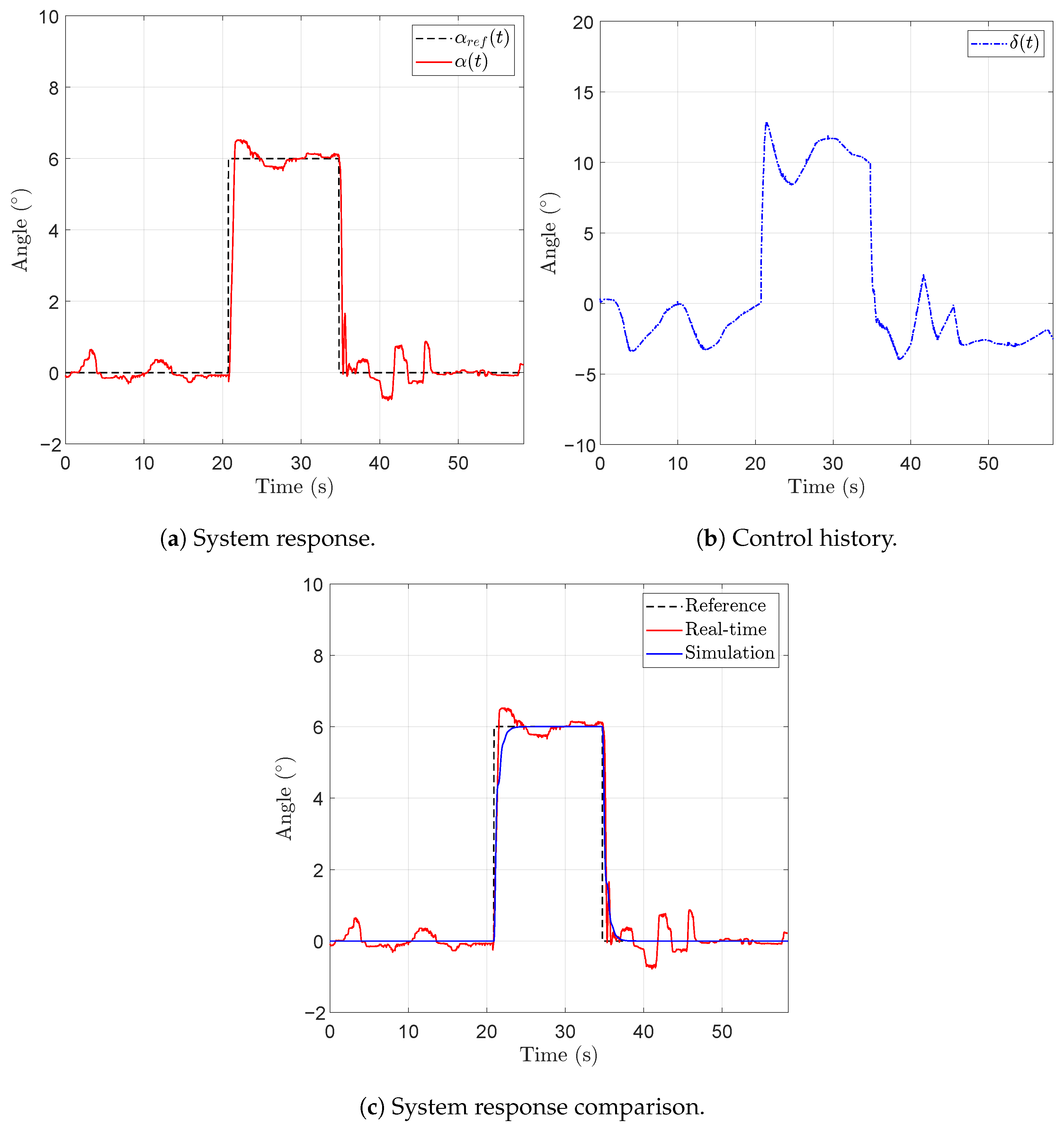
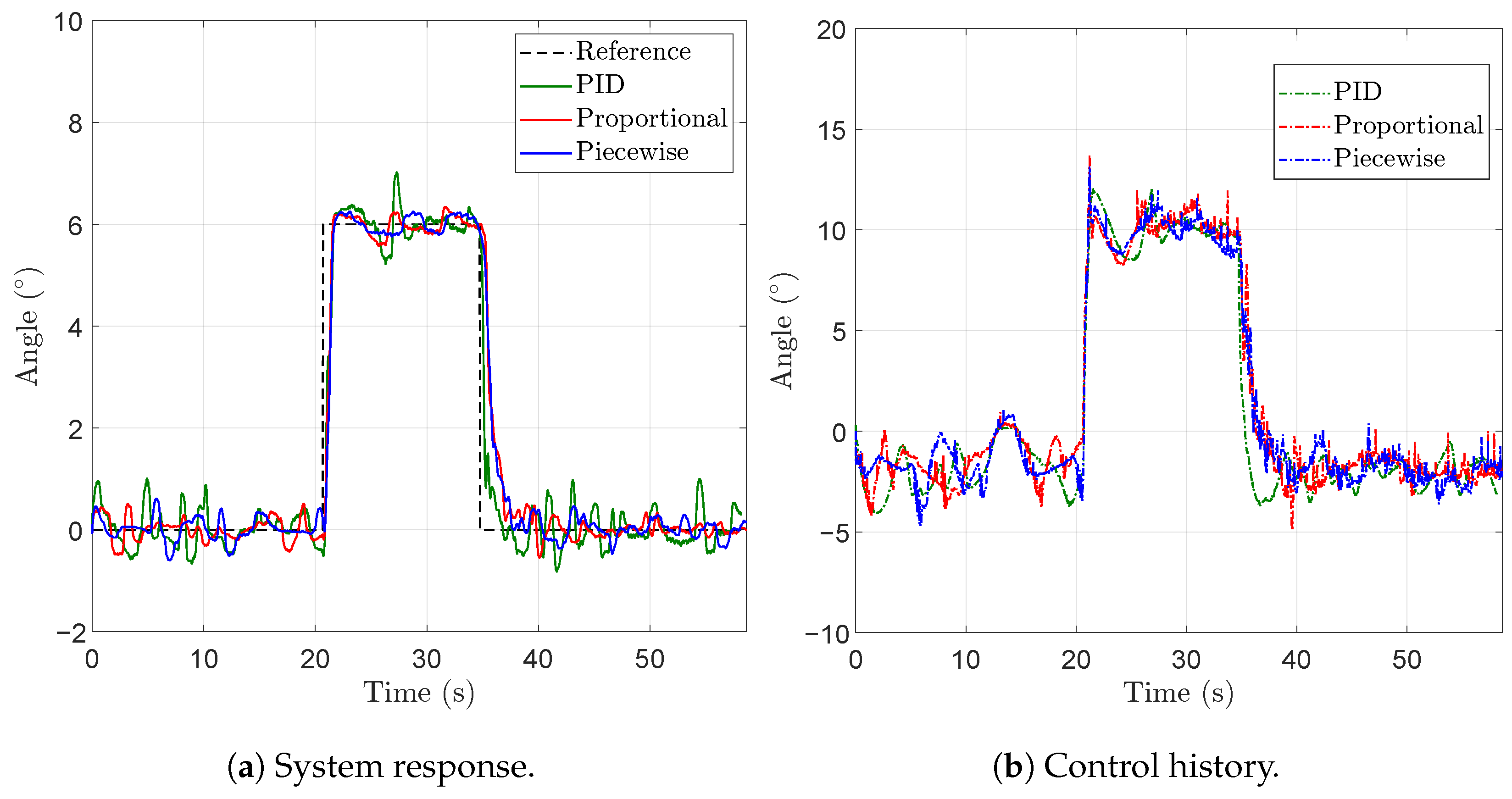
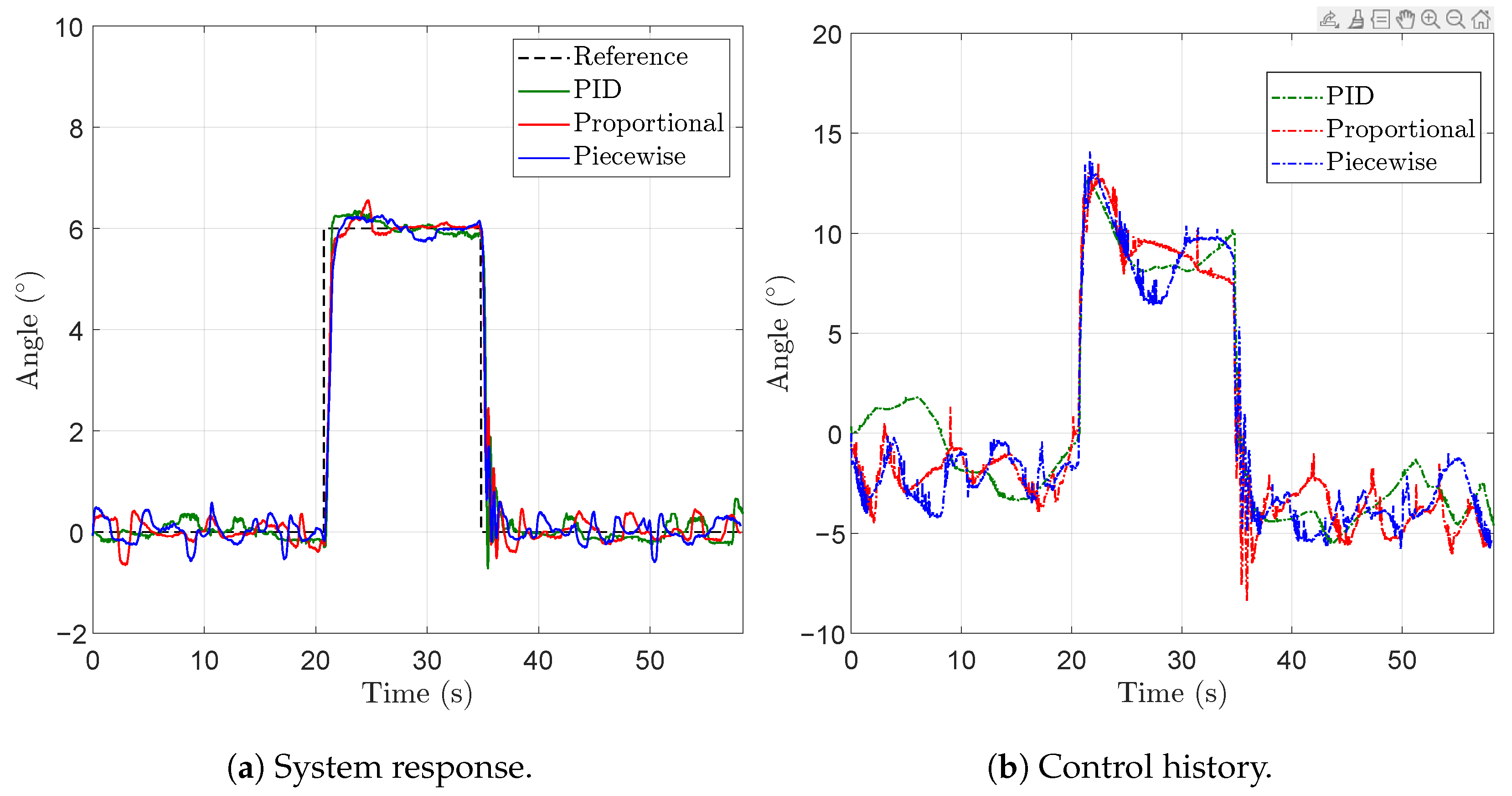
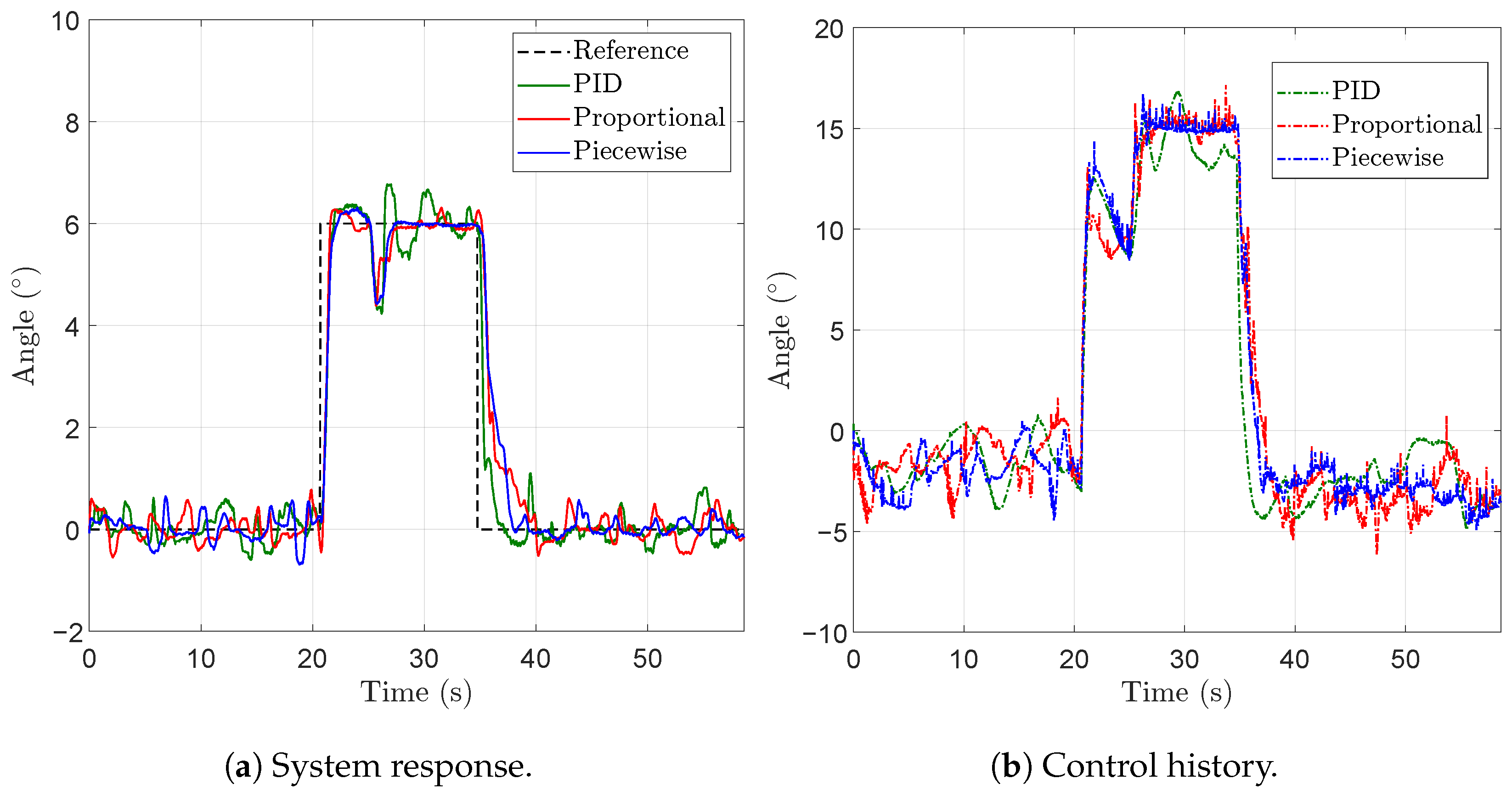
5. Implementation Results
5.1. Nominal Performance
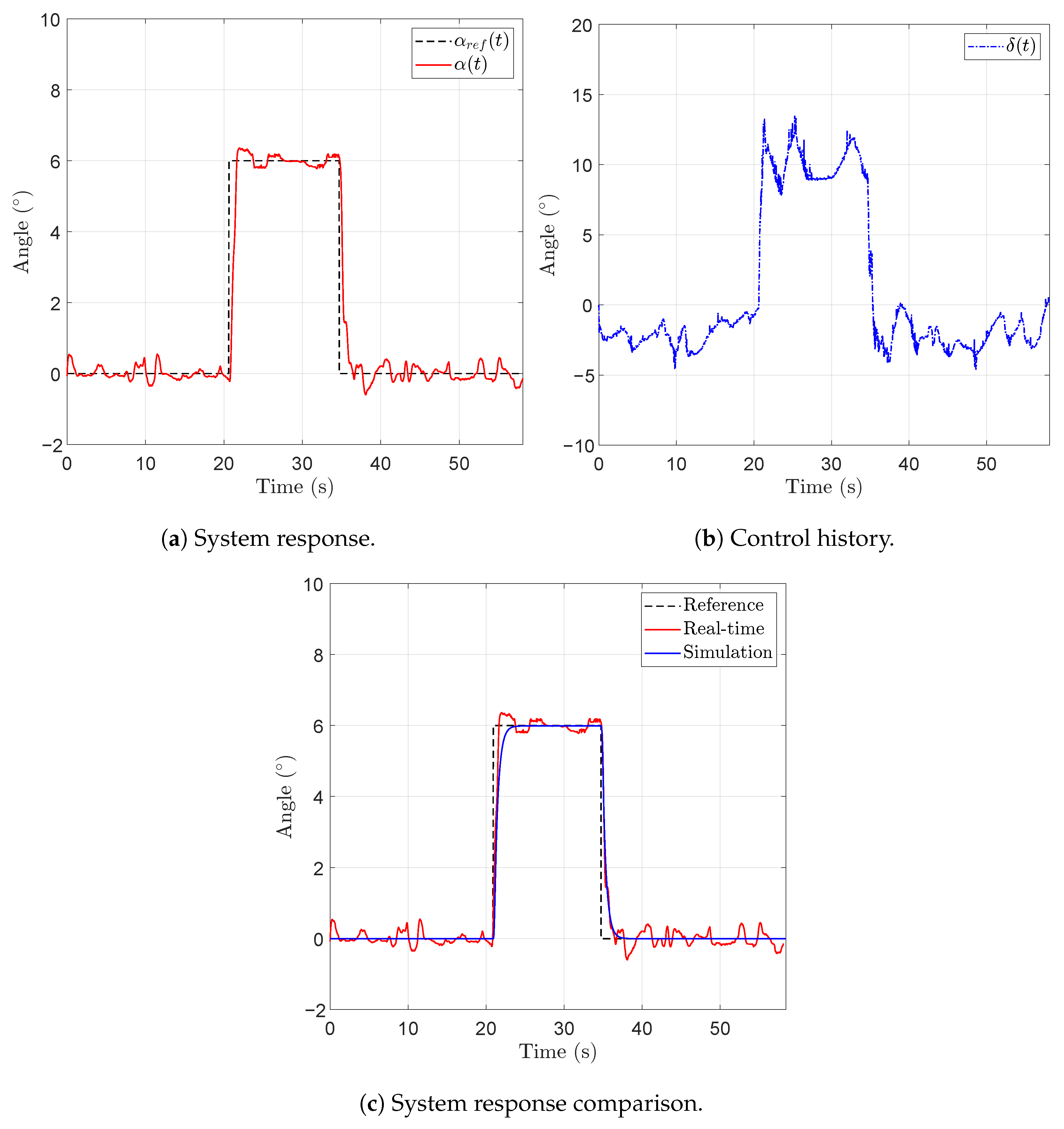
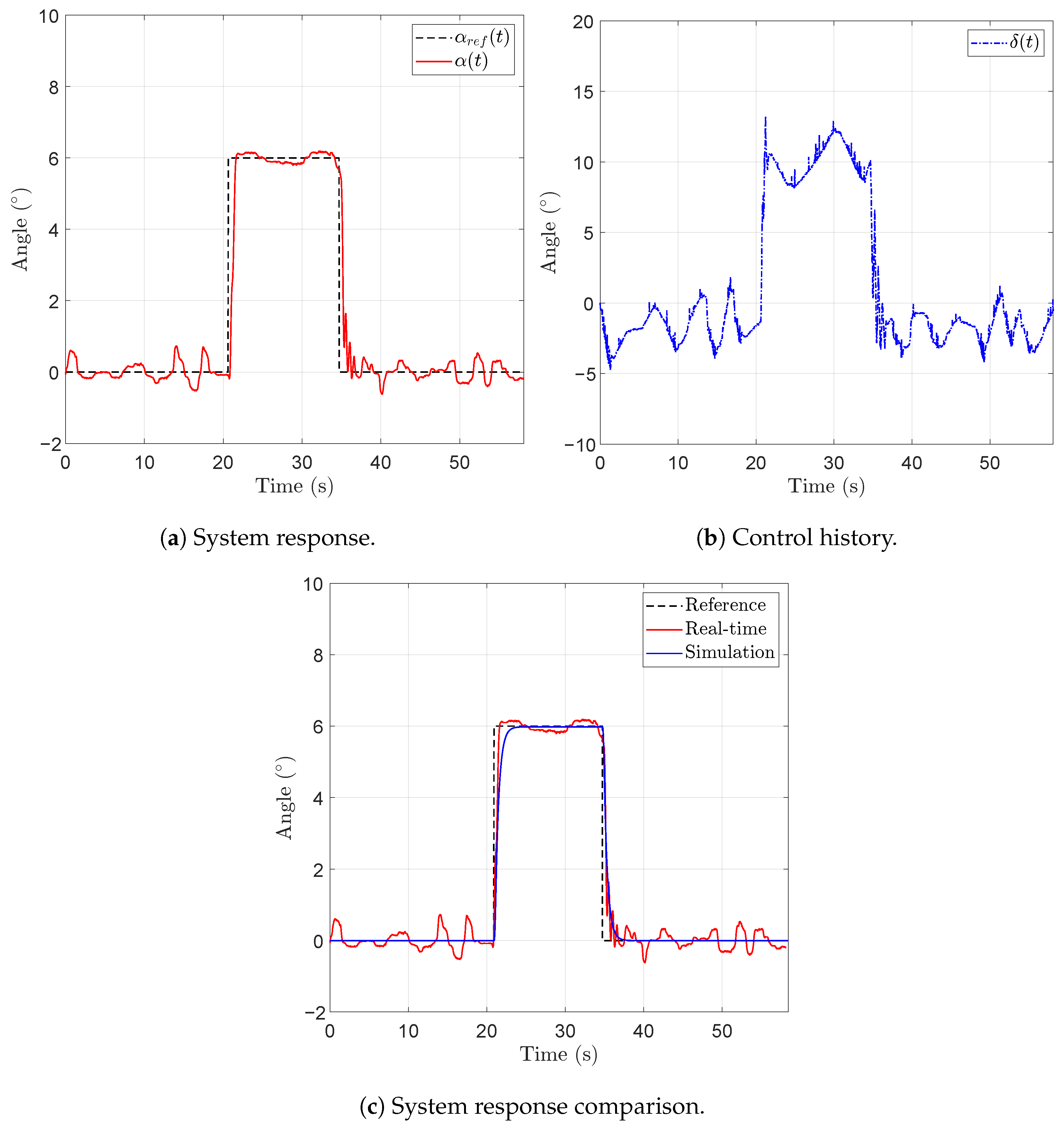
5.2. Robustness Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Piecewise Adaptive Law

References
- Nelson, R.C. Flight Stability and Automatic Control; McGraw-Hill Education: New York, NY, USA, 2013. [Google Scholar]
- Aström, K.J.; Wittenmark, B. Adaptive Control; Dover Publications: Mineola, NY, USA, 2010. [Google Scholar]
- Shackcloth, B.; Butchart, R.L. Synthesis of model reference adaptive systems by Liapunov’s second method. IFAC Proc. Vol. 1965, 2, 145–152. [Google Scholar] [CrossRef]
- Hovakimyan, N.; Cao, C. Adaptive Control Theory: Guaranteed Robustness with Fast Adaptation; SIAM: Philadelphia, PA, USA, 2010. [Google Scholar] [CrossRef]
- Cao, C.; Hovakimyan, N. Design and analysis of a novel adaptive control architecture with guaranteed transient performance. IEEE Trans. Autom. Control 2008, 53, 586–591. [Google Scholar] [CrossRef]
- Gregory, I.; Cao, C.; Xargay, E.; Hovakimyan, N.; Zou, X. adaptive control design for NASA AirSTAR flight test vehicle. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 5738. [Google Scholar] [CrossRef]
- Xargay, E.; Dobrokhodov, V.; Kaminer, I.; Pascoal, A.M.; Hovakimyan, N.; Cao, C. Time-Critical Cooperative Control of Multiple Autonomous Vehicles: Robust Distributed Strategies for Path-Following Control and Time-Coordination over Dynamic Communications Networks. IEEE Control Syst. Mag. 2012, 32, 49–73. [Google Scholar] [CrossRef]
- Dobrokhodov, V.; Xargay, E.; Hovakimyan, N.; Kaminer, I.; Cao, C.; Gregory, I.M. Multicriteria analysis of an adaptive flight control system. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2013, 227, 413–427. [Google Scholar] [CrossRef]
- Cichella, V.; Kaminer, I.; Dobrokhodov, V.; Xargay, E.; Choe, R.; Hovakimyan, N.; Aguiar, A.P.; Pascoal, A.M. Cooperative path following of multiple multirotors over time-varying networks. IEEE Trans. Autom. Sci. Eng. 2015, 12, 945–957. [Google Scholar] [CrossRef]
- Suárez Fernández, R.A.; Dominguez, S.; Campoy, P. adaptive control for wind gust rejection in quad-rotor UAV wind turbine inspection. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1840–1849. [Google Scholar] [CrossRef]
- Xu, D.; Whidborne, J.F.; Cooke, A. Fault tolerant control of a quadrotor using adaptive control. Int. J. Intell. Unmanned Syst. 2016, 4, 43–66. [Google Scholar] [CrossRef]
- Ackerman, K.A.; Xargay, E.; Choe, R.; Hovakimyan, N.; Cotting, M.C.; Jeffrey, R.B.; Blackstun, M.P.; Fulkerson, T.P.; Lau, T.R.; Stephens, S.S. Evaluation of an adaptive flight control law on Calspan’s variable-stability Learjet. J. Guid. Control Dyn. 2017, 40, 1051–1060. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, H.; Guo, H.; Duan, X. adaptive dynamic inversion attitude control for unmanned aerial vehicle with actuator failures. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 4129–4140. [Google Scholar] [CrossRef]
- Cao, C.; Hovakimyan, N. adaptive output feedback controller for systems of unknown dimension. IEEE Trans. Autom. Control 2008, 53, 815–821. [Google Scholar] [CrossRef]
- Cao, C.; Hovakimyan, N. adaptive output feedback controller for non strictly positive real reference systems with applications to aerospace examples. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; p. 7288. [Google Scholar] [CrossRef]
- Mahdianfar, H.; Hovakimyan, N.; Pavlov, A.; Aamo, O.M. adaptive output regulator design with application to managed pressure drilling. J. Process Control 2016, 42, 1–13. [Google Scholar] [CrossRef]
- Lee, H.; Snyder, S.; Hovakimyan, N. adaptive output feedback augmentation for missile systems. IEEE Trans. Aerosp. Electron. Syst. 2017, 54, 680–692. [Google Scholar] [CrossRef]
- Zhu, R.; Yin, G.; Chen, Z.; Zhang, S.; Guo, Z. Temperature control of cryogenic wind tunnel with a modified adaptive output feedback control. Meas. Control 2018, 51, 498–513. [Google Scholar] [CrossRef]
- Ma, T.; Cao, C. adaptive output-feedback control of multivariable nonlinear systems subject to constraints using online optimization. Int. J. Robust Nonlinear Control 2019, 29, 4116–4134. [Google Scholar] [CrossRef]
- Ma, T.; Cao, C. adaptive control for general partial differential equation (PDE) systems. Int. J. Gen. Syst. 2019, 48, 656–689. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, H.; Guo, H. adaptive output-feedback fault-tolerant control for uncertain nonlinear systems subject to unmodeled actuator dynamics and faults. Trans. Inst. Meas. Control 2022, 44, 2177–2192. [Google Scholar] [CrossRef]
- Souanef, T.; Fichter, W. Adaptive altitude hold of a small UAV with switching adaptation laws. IFAC Proc. Vol. 2013, 46, 212–217. [Google Scholar] [CrossRef]
- Souanef, T. Adaptive Guidance and Control of Small Unmanned Aerial Vehicles; Shaker Verlag: Herzogenrath, Germany, 2019. [Google Scholar]
- Souanef, T. adaptive output feedback control of small unmanned aerial vehicles. Unmanned Syst. 2023, 11, 249–260. [Google Scholar] [CrossRef]
- Mansor, H.; Mohd-Noor, S.B.; Gunawan, T.S.; Khan, S.; Othman, N.I.; Tazali, N.; Islam, R.B. Performance comparisons between PID and adaptive PID controllers for travel angle control of a bench-top helicopter. Int. J. Electr. Inf. Eng. 2015, 9, 35–40. [Google Scholar] [CrossRef]
- Quanser. 3 DOF Helicopter; Product Info Sheet; Quanser: Markham, ON, Canada, 2015. [Google Scholar]
- Subramanian, R.G.; Elumalai, V.K. Robust MRAC augmented baseline LQR for tracking control of 2 DoF helicopter. Robot. Auton. Syst. 2016, 86, 70–77. [Google Scholar] [CrossRef]
- Quanser. 2 DOF Helicopter; Product Info Sheet; Quanser: Markham, ON, Canada, 2015. [Google Scholar]
- Villarreal-Valderrama, F.; Takano De La Cruz, L.; Alvarez, U.; Amezquita-Brooks, L.; Liceaga-Castro, E. Design of an aircraft pitch control experimental test bench. In Proceedings of the IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 14–16 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Duran, J.R. Flight Desk Control Demonstrator. Master’s Dissertation, Cranfield University, Bedfordshire, UK, 2018. [Google Scholar] [CrossRef]
- Duran, J.R.; Whidborne, J.F.; Carrizales, M.; Pontillo, A. A benchtop flight control demonstrator. Int. J. Mech. Eng. Educ. 2021, 49, 80–97. [Google Scholar] [CrossRef]
- Vanness, J.; Kharisov, E.; Hovakimyan, N. adaptive control with proportional adaptation law. In Proceedings of the American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 1919–1924. [Google Scholar] [CrossRef]
- Vanness, J. Two New Extensions to L1 Adaptive Control Theory. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 2012. [Google Scholar]
- Arduino. Arduino—Home. 2024. Available online: http://www.arduino.cc (accessed on 15 September 2023).
- Dobrokhodov, V.; Kaminer, I.; Kitsios, I.; Xargay, E.; Hovakimyan, N.; Cao, C.; Gregory, I.M.; Valavani, L. Experimental validation of adaptive control: The Rohrs counterexample in flight. J. Guid. Control Dyn. 2011, 34, 1311–1328. [Google Scholar] [CrossRef]
- Anyoji, M.; Okamoto, M.; Hidaka, H.; Kondo, K.; Oyama, A.; Nagai, H.; Fujii, K. Control surface effectiveness of low Reynolds number flight vehicles. J. Fluid Sci. Technol. 2014, 9, JFST0072. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bagati, D.; Souanef, T.; Whidborne, J.F.
Design and Implementation of an
Bagati D, Souanef T, Whidborne JF.
Design and Implementation of an
Bagati, Deepanshu, Toufik Souanef, and James F. Whidborne.
2024. "Design and Implementation of an
Bagati, D., Souanef, T., & Whidborne, J. F.
(2024). Design and Implementation of an