Abstract
In grasping operations, when facing unstructured environments, the use of soft-body grippers can be a good solution to the problem of grasping objects that are inconvenient to grasp due to their fragility and irregularity. However, as the soft-body gripper is composed of soft-body material, there are problems such as insufficient gripping power. The envelope-gripping method using a fingerless structure of the soft gripper has high gripping capacity. In this paper, a new type of pneumatic, soft-body, fingerless gripper (SFLG) is proposed based on envelope-type grasping. With its rigid connectors, it forms a soft-body gripper. By changing the air pressure and structure of the internal air cavity of the fingerless gripper, the degree of deformation can be controlled to achieve grasping of the object by the soft-body gripper. Experiments show that the soft-body gripper can grasp objects of different shapes and sizes. The SFLG can grasp objects up to 6 times higher than itself, and the soft gripper of this size can grasp objects up to 13 times heavier than itself. A pneumatic, fingerless, soft gripper has been designed to grasp small and heavy or tall objects in contrast to other fingerless soft grippers.
1. Introduction
Gripping objects has become one of the important output functions of robots, which are mainly used in engineering [1,2,3,4]. As soft materials are used for the body structure in soft grippers, they have the advantage of better adaptability and simple control when facing various shapes of graspable objects and unstructured environments [5,6,7,8,9]. Currently, many different types of soft-end effector structures have been developed and many of them are being commercialized [10].
Soft-hand actuation can be divided into two main groups according to whether it relies on smart materials for actuation. One group is flexible-fluid actuation represented by pneumatic actuation, and the other one is smart-material actuation [11]. Pneumatically actuated soft grippers have the highest utility at present due to the simplicity of obtaining of a source of pneumatic actuation and its low price and good controllability [12]. In the study of soft-hand movement by pneumatic actuation, it was found that soft grippers composed of soft materials could effectively control the deformation of soft grippers by changing the internal structure or adding constraints when it was driven by pneumatic pressure. Based on the bionic principle, the main action modes of grasping objects include bending grasping, adsorption grasping, envelope grasping, etc. The structure of bending grasping is usually a tentacle-like, claw-shaped or humanoid hand-shaped Pnue-Nets bending actuator, for which there is the most research that has been widely expanded [13,14,15,16,17,18]. Such a grasping mode can be achieved by increasing the bending of the restraining material toward the side of the harder material. The bending angle and the magnitude of the grasping force do not remain the same when the shape or the area of the internal air chamber differ. However, the soft body of this type of actuator is made of soft materials, which have a poor load-bearing capacity. Researchers have subsequently improved its load-bearing capacity by increasing the stiffness of structures or materials, such as in fiber-reinforced actuators [19,20,21] and MiKibben-type Pneumatic Artificial Muscle (PAM) actuators [22,23,24]. Adsorptive grasping is mainly achieved by suction cup vacuuming [10,25], which improves the surface adhesion, thus increasing the suction force of grasping. However, this is not suitable for objects with rough and irregular surfaces. On the other hand, in envelope gripping, objects are gripped by contacting the surface of object for multi-surface extrusion and wrapping the object. Brown et al. were the first to propose a general-purpose soft-gripper jaw, based on the particle obstruction principle, with a load of up to 8 kg [26]. As the soft gripper will bear a greater load capacity due to its overall wrapping of the object, some research has been performed on this gripping method.
2. Relaxed Works
Envelope-grasping designs of soft-body grippers can be divided into fingered soft-body grippers and fingerless soft-body grippers by the presence or absence of a typical claw structure. Liu [27] et al. proposed a two-fingered soft gripper with gripping modes for envelope grasping and pinch grasping. The resultant study showed that it could provide a greater grasping force to grasp a large object in the EG mode; similar research was performed on pinching and enveloping grasping by a novel pneumatic gripper proposed by Zhang [28]. There is a lot of research on this type of pneumatic network structure. In order to increase the gripping force of the soft gripper, there is more and more research being conducted on envelope grasping. A soft clawless gripper with an envelope structure also has excellent grasping performance. Wang [29] et al. proposed a round-shell gripper consisting of a rigid shell and four soft internal air chambers, which can grasp objects with irregular shapes and those with a heavy weight but cannot grasp low-profile objects; Li [30] et al. designed and manufactured a high-load soft gripper (HL) based on the principle of bionic winding and designed four soft grippers with different winding modes, all of which had high loading capacity but were weak when grasping small-sized objects because of the limitation of the range of opening and closing. Hao [31] et al. designed and manufactured a multimodal enveloped soft gripper based on the accordion structure, which could lift objects of 20 N but could not grasp small slender objects. Wang [32] et al. were inspired by the seven-gill eel to design pneumatic soft grippers with a high load capacity and large grasping range, which could lift objects of 10.85 kg but could not locate and grasp the objects because one end of the cylindrical soft brake was closed. A comparison of different grasping modes of fingered soft grippers and envelope-based grasping by fingered soft grippers and fingerless soft grippers is shown in Table 1.

Table 1.
Classification of different grasping modes of finger-enabled soft grippers and categorization of finger-enabled and fingerless soft grippers for envelope grasping.
The fingerless soft-body gripper has good gripping ability based on the fingerless structure. Currently, there are few soft grippers designed for envelope structures and they have certain deficiencies. On this basis, we designed the cylindrical SFLG for envelope gripping. In this paper, we use the same differences in material and wall thickness to propose a new SFLG design concept. By changing the internal air chamber of the soft-body gripper, using the inter-chamber constraints, we designed three different soft-body grippers, which could realize self-adjustment of the object to be gripped that is driven by pneumatic pressure, thus enveloping the object to be gripped. The structure of this paper is as follows. First, we described the structure and grasping of the SFLG. Then, we proposed the effect of the angle of the air chamber on the deformation of the soft-body gripper and described the relationship between air pressure and the deformation of the soft-body gripper through finite element calculations; after that, we performed grasping tests using the soft-body grippers with three structures and the same air chamber angle, which were used to grasp the objects with different shapes and sizes. The experiment showed that the three types of soft-body grippers all had high grasping forces. In the grasping experiments, the SFLG made for envelope grasping had excellent grasping performance. It could grasp fragile, irregular, and thin objects. At the same time, it could grasp objects of a certain height and weight. The SFLG proposed in this paper has good application prospects in gripping small and heavy objects and provides new ideas for designing the structure of soft-end grippers.
3. Material and Methods
3.1. Gripping Principle of Envelope-Gripping SFLG
The SFLG is designed to enable envelope grasping. The outermost layer is the constraint zone that is used to limit the deformation; the surface area in contact with the object is the strain zone, which is deformed driven by the pneumatic pressure and used to envelope the object; and the constraint zone and the strain zone each have an air cavity in the middle, which is generally inflated with air to act on the strain zone. Based on the envelope-grasping design of the SFLG, the air pressure acts on the strain zone through the air-cavity area, and the strain zone is deformed to squeeze and grasp an object. The schematic diagram of transmission for the soft-body gripper before deformation is as shown in Figure 1a and that of the soft-body gripper after deformation is as shown in Figure 1b. The blue-shaded area shows the deformation of the strain zone. From the schematic diagram of grasping, we can deduce that the grasping deformation of the pneumatically driven soft-body gripper is related to the cavity structure. That is, the deformation of the strain zone is related to the structure of the cavity, and the object is grasped depending on the ability of the deformation of the strain zone to realize the deformation of the strain zone.
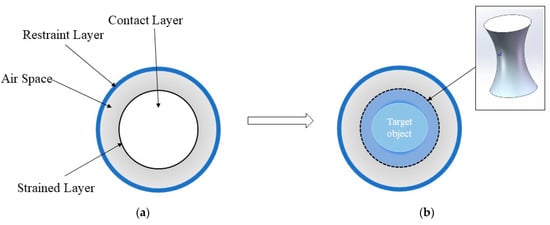
Figure 1.
Gripping principle of envelope-gripping SFLG. (a) Before deformation, blue constraint zone, restricting the outer deformation; gray indicates the gas cavity; black coil indicates the strain zone, which is deformed; and in the inner white area the grasping behavior is realized. This figure is only a schematic diagram representing the design of the fingerless soft gripper and does not represent its dimensions. (b) After deformation, when the gas enters the gas cavity and acts on the strain zone, the strain zone has a shaded blue deformation, and the upper-right corner is a three-dimensional view of the deformation that occurs in the strain zone.
3.2. Design of SFLG
Based on the above grasping principle, a soft-body gripper was designed. Through the design of different wall thicknesses of the constraint zone and the strain zone, the wall of the strain zone was thin. Therefore, driven by the pneumatic pressure, it first acted on the strain zone. In order to further limit the constraint zone, we added the fiber mesh constraints outside the constraint zone (in the allowable air-pressure range of the soft-body gripper, constraints can be very good and slight deformation will not affect the grasping of the soft-body gripper). It is extremely important to study the deformation of a pneumatically driven soft-body gripper when grasping objects. When designing a soft-body gripper in accordance with the structure of Figure 1, the soft structure in the part of the strain zone must be homogeneous. If there are air bubbles in the strain zone, the deformation of the soft-body gripper cannot be controlled. As the SFLG is composed of soft material, the main manufacturing and processing methods for pneumatically driven soft robots are the casting method and 3D-printing method, and these methods cannot avoid the appearance of air bubbles in the part of the strain zone. If these air bubbles are to be completely eliminated, a great deal of manufacturing and processing time and cost are required, which will not be good for production and use. Therefore, in this case, we control the deformation by changing the structure of the internal cavity (i.e., the air-cavity structure), blocking an air chamber and increasing the mutual constraints so that the deformation of the soft gripper of this design will not be affected even if there are bubbles. Based on this design, we can effectively control the deformation of the gripper, thus realizing the envelope grasping of the object. As shown in Figure 2, the air cavities in the schematic diagram have equal volumes, and the resulting design can effectively control the deformation shape of the SFLG.
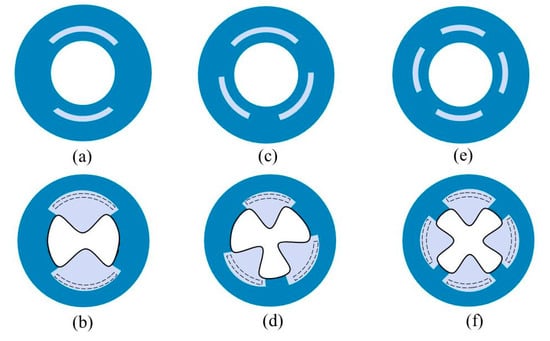
Figure 2.
The SFLG design and actuation deformation (a) is blocked by one air chamber into two air chambers, and the two air chambers deform (b) under the surrounding constraints; (c) is blocked by one air chamber into three air chambers and deforms (d) under the surrounding constraints; similarly, (e) deforms (f) under air-pressure actuation.
3.3. Manufacture of Soft-End Grippers
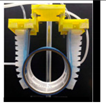
In this paper, the soft-body gripper is produced mainly by 3D printing technology and casting methods. Figure 3a shows the processing and manufacturing steps of the soft-body end gripper. Here, we take the two-cavity SFLG as an example. The manufacturing and processing methods of three-cavity and four-cavity SFLGs are the same. The shape of the SFLG is cylindrical. After the 3D printing of the mold and assembly, soft silicone material is prepared. After the extraction of air bubbles under a vacuum, it is poured into the assembly mold to obtain the soft-body gripper. Due to the particular viscosity of the silicone, the soft-body gripper has a certain friction. In order to make the SFLG convenient to use, a rigid connecting device was designed. Through 3D printing, the rigid connecting part is made of ABS material. Finally, the rigid connecting device was assembled with the SFLG to obtain the soft-body end gripper. The actual picture of the fabrication is shown in the bottom right of Figure 3a. Figure 2a gives an example. The dimensions of the soft-body gripper are shown in Figure 3b, and their size and significance are shown in Table 1. The dimensions of the other two structures are identical.
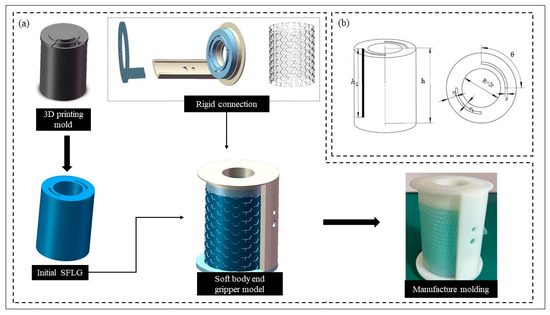
Figure 3.
Processing and manufacturing of flexible-end grippers. (a) Design and actual drawing of flexible-end grippers, The initial SFLG is obtained from a 3D printing mold and connected to a rigid connector to form the soft body end gripper, with the manufactured molding is shown in the lower right corner; (b) dimensions of flexible grippers.
3.4. Finite Element Simulation of the SFLG
Rigid connectors are usually connected with the soft-body gripper to form the soft-body end gripper. Therefore, in the finite element analysis, we only analyzed the soft-body gripper part. We were able to analyze the deformation of the soft-body gripper under air pressure. As the dimensions of the constraint and strain zones of the soft gripper are the same, (that is, , , r, and h are the same) when the height h1 and the width s of the air cavity are the same and the arc lengths of the air cavity are different, (that is, when θ is different), different deformation occurs due to the existence of the constraints on the left and right sides. The deformation studied here refers to the deformation of the inner wall of the air pressure that is driven by the air pressure. Figure 4a shows the deformation of a single cavity with deformation length d. Figure 4b shows the deformation of soft fingerless grippers with different structures, and Δ denotes the size of the smallest object to be gripped.
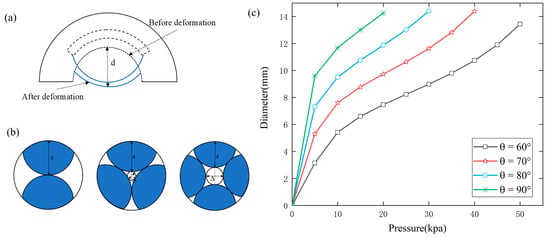
Figure 4.
Deformation of the soft gripper and the relationship between air pressure and deformation for different θ values. (a) Deformation of a single cavity; (b) deformation of three different structures; (c) Finite element calculation values of air pressure versus deformation for different values of θ.
When the same value of θ is taken, the deformation of the individual air cavities of the three soft-body fingerless grippers with different structures is identical under the same air pressure, and the degree of deformation of the air cavities determines the size of the grasped object. We take the soft-body gripper with the single-cavity structure as the research object and use the static elastic model in ABAQUS(2022) for simulation modeling. Based on the stress–strain experimental data of a uniaxial tensile test, the test sample is dumbbell-shaped and its thickness is 2 mm, as shown in Figure 5a,b. We brought the experimental data into ABAQUS and used the Odgen model (N = 1) coefficients with the coefficients μ1 = 9.6747 × 10−2 and α1 = 3.0159. We conducted finite element analysis on different pinch angles θ of a single air cavity to study the relationship between different pinch angles θ and deformation under different air pressures. From the finite element results in Figure 4c, it can be seen that the deformation under different values of pinch angle θ increases with the increase in pressure; when the air pressure is the same, the larger the pinch angle θ is, the larger the deformation is. When the air pressure is 10 kpa, the deformation degrees under different values of pinch angle θ are the largest; in particular, with a larger pinch angle θ the structure will have a large deformation in the environment under a small air pressure.
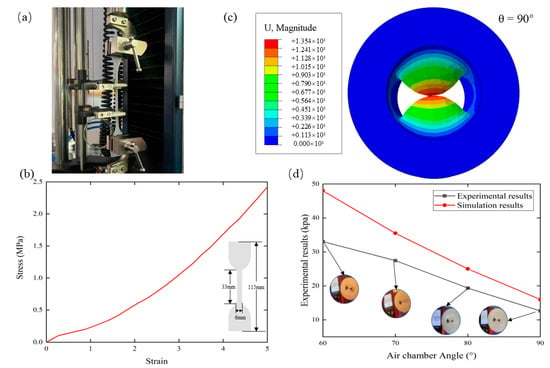
Figure 5.
Tensile test and finite element calculation. (a) Tensile test by USA-MTS-E45.105 electronic universal tensile machine; (b) tensile test results with a dumbbell shape as the test specimen; (c) finite element calculation of the soft gripper when the air cavity angle is 90°; and (d) experimental and finite element calculations of the air-pressure value when contact occurs between the SFLG of the two air cavities.
When the length of the deformation value (d) is equal to the inner-wall radius r, we took the two-cavity structure of the SFLG as the research object, obtained the relationship between the air cavity angle θ and the air pressure through the finite element calculation, and compared it with the test results. Due to the existence of manufacturing inhomogeneity, we made three identical soft-body grippers at the same time for test comparison. From the results in Figure 5d, the larger the angle θ is, the closer the finite element calculation value is to the experimental value. Both the finite element calculation result and the experimental result show that the value of the required air pressure decreases as the angle θ increases when the deformation reaches the radius of the inner wall. By comparing the experimental results with the simulated results, it can be concluded that the finite element model can be used to predict the deformation of the soft gripper. The air-pressure value obtained can provide a basis for later studies to avoid overpressure when the air cavity ruptures.
4. Results
4.1. Gripping Range of Soft Grippers with Different Structures
Based on the manufacturing method in Figure 3 and the parameters of the soft-body clawless gripper in Table 2, three kinds of soft-body grippers were designed and prepared. The three kinds of soft-body grippers had similar appearances of their rigid connectors and soft-body grippers, and the weights of the two-cavity SFLG, the three-cavity SFLG, and the four-cavity SFLG were 84.3 g, 82.7 g, and 80.0 g, respectively; the weights of the two-cavity soft-body gripper, the three-cavity soft-body gripper, and the four-cavity soft-body gripper were 101.3 g, 100.0 g, and 97.2 g, respectively. The quality of the three structures did not differ much. The SFLG material is soft and can safely interact with the object, and the soft-body gripper connected with the rigid connectors can be used as the end gripper to connect with the robotic arm, the bracket and so on. As can be seen from the previous section, the deformation of the soft gripper is not the same for different θ values. In order to compare the three soft grippers with different structures, we chose the soft gripper with θ = 80° for investigation in the following study.
Table 2.
Parameters of the SFLG.
Different air-pressure actuation leads to different deformation of the soft-body fingerless gripper; the size of deformation can determine the size range of the grasped object, and the deformation of the soft-body gripper occurs through the movement of the inner cavity of the soft-body gripper. As shown in Figure 6, the left picture shows the test deformation platform. As each cavity is the same, deformation ranging was performed for a single air cavity, i.e., the distance between the deformation point and the middle position of a single cavity. When a soft-body gripper grasps objects and the grasped object is in the grasping range, the soft-body fingerless gripper envelops the grasped object through the inner cavity movement, so as to hold the object, and the soft-body gripper squeezes the object in contact, as shown by the extrusion test platform on the right side of Figure 6. For the same soft-body gripper, five points on a surface were collected for testing. In addition, the maximum grasping range of the three different cavity structures of the soft-body gripper is 26 mm when the inflatable pressure is 0. The three soft-body structures are inflated as shown in Figure 7. For the soft-body-two-cavity gripper, Δ = 0 mm and the grasping range is 0 < d ≤ 26 mm; for the soft-body-three-cavity gripper, Δ = 3 mm and the grasping range is 3 ≤ d ≤ 26 mm; and for the soft-body-four-cavity gripper, Δ = 5.5 mm and the grasping range is 5.5 ≤ d ≤ 26 mm. In this paper, only two, three, and four cavities are discussed. When the number of air cavities is increased again, θ must be reduced and the grasping range will become smaller.
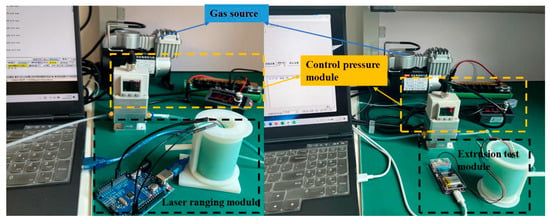
Figure 6.
The picture on the left is laser-ranging module. Build the single-cavity deformation experiment platform of soft-body gripper and the extrusion pressure test platform. The air compressor outputs gas and the proportional valve and signal generator control the air pressure. The ranging device gets the single-cavity deformation data based on the laser sensor; The picture on the right is extrusion text module, in the extrusion pressure test, a sphere with the same diameter as the inner wall of the soft-body gripper is selected, and the thin-film sensor is attached to the surface of the sphere.
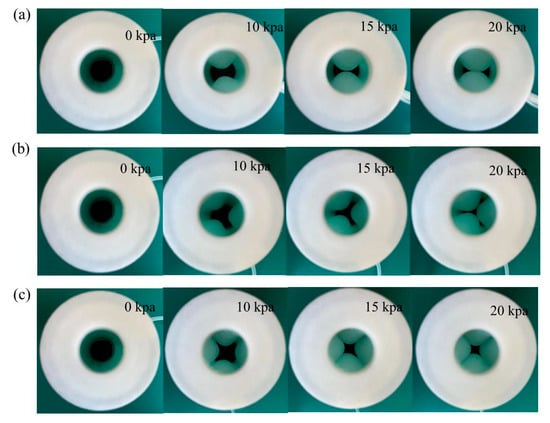
Figure 7.
Grasping state of the three structures under air pressure of 0–20 kpa: (a) two-cavity soft grabber, (b) three-cavity soft grabber, and (c) four-cavity soft grabber.
According to the test results in Figure 8a, it is obvious that the effective working air pressure is between 0 and 20 kpa, Δ has a nonlinear inverse relationship with the air pressure, and objects with a smaller size can be grasped through the increase in air pressure; from the extrusion in Figure 8b, the extrusion pressure is getting higher with the increase in air pressure, which shows that the three kinds of soft grippers are closed in the internal structure of the air cavities in the grasping range under corresponding pressure, so the following research can be continued. From the test results, the error value is large. In the same air cavity, the squeezing pressure on the surface of an air cavity is different under the same air pressure in five different positions due to their different constraints, which can explain differences in vertical surface deformation driven by the air pressure of a single cavity.
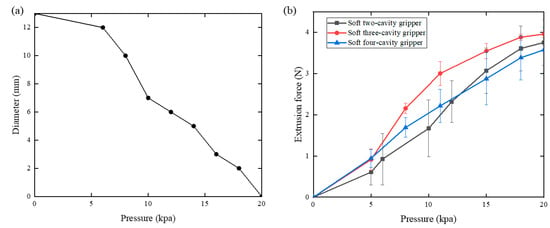
Figure 8.
Deformation of the single cavity of a soft gripper and the squeezing force on objects. (a) Single-chamber deformation. Single-chamber deformation under air pressure of 0–20 kpa. Double the value measured here can be used as the diameter value of the smallest grasping object of a two-cavity soft gripper. (b) Extrusion test of the object driven by soft gripper under the air pressure of 0–20 kpa.
4.2. Effects of Different Pressures and Different Sizes of Objects on Grasping Ability
Under different pressures, for the capacity to load objects with different sizes, we chose the same sphere with different sizes. Taking into account the gripping range of the three kinds of grippers, the diameter of the sphere is 8–24 mm. The soft-gripper-tension-test device is shown in Figure 9, and the clamped sphere is connected to the force sensor by a rope and the lower end of the soft gripper is fixed. When the soft gripper being tested is inflated and firmly grips the sphere, the force sensor moves linearly along the top to test the tensile force at different pressures and with different sphere sizes.

Figure 9.
Flexible-gripper-tension-test device.
The results, as shown in Figure 10, indicate that we can improve the gripping ability of the soft-body gripper by increasing the inflation air pressure, and the fixture has a stronger gripping force for spheres with larger sizes. The soft gripper with two chambers shows excellent gripping power at a small air pressure, and the gripping power increases significantly at 8–12 kpa and is gentle at more than 12 kpa. The gripping power of the soft gripper with three chambers increases uniformly in small-size sphere experiments, and the gripping power significantly increases with the increase of the air pressure in the large-size sphere experiments, especially when the diameter of the sphere is equal to 24. The gripping force of the four-chambered soft gripper and the three-chambered soft gripper when gripping small-sized spheres is somewhat similar, but the difference is that a larger air pressure is required to grip small-sized objects due to the limitation of the gripping range of the four-chambered soft gripper.
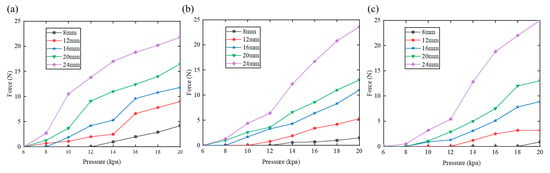
Figure 10.
Tensile-force that flexible fingerless grippers can withstand when gripping spheres of different diameters under different pressures. (a) Tensile-force test of a two-chambered flexible gripper, (b) tensile-force test of a three-chambered flexible gripper, and (c) tensile-force test of a four-chambered flexible gripper; here, we show the tensile force recorded when stretching for a length of 16 mm.
4.3. Gripping Test for Objects of Different Shapes
Figure 11 shows the tension tests for gripping objects with different shapes. It can be seen that the more surfaces there are, the greater the load that the soft gripper can withstand is when comparing the rectangular, pentagonal, and hexagonal prisms with the same height, indicating that the load capacity will increase when the contact surface increases. Therefore, when the shape of the object is a cylinder, the load capacity is the largest. When the shape of the object is a cone, because the contact surface is smaller, the load capacity has been reduced. When gripping small objects such as sphere and cubic, the performance of the two-cavity soft gripper is optimal, which is due to the fact that the two-cavity soft gripper can wrap around the object well when the object is small; the three-cavity and four-cavity soft grippers perform better than the two-cavity grippers when the object has a certain height.
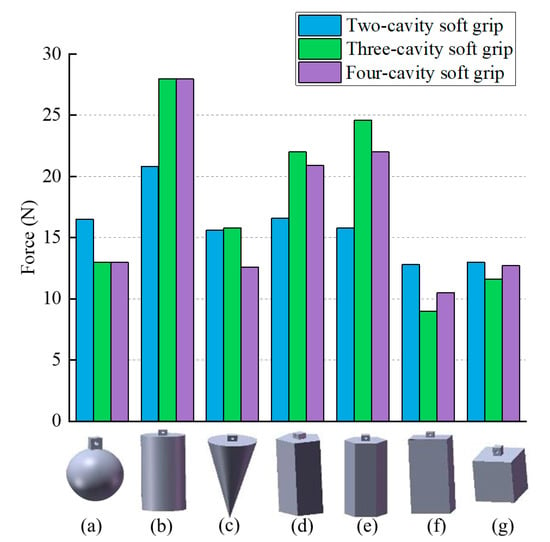
Figure 11.
Grasping objects with different structures, including (a) a sphere, (b) a cylinder, (c) a cone, (d) a pentaprism, (e) a hexagonal prism, (f) a cube, and (g) a square, while letting the ball diameter, cylinder diameter, cone diameter, diameter of externally tangent circle of pentaprism, diameter of externally tangent circle of hexagonal prism, and length and width of rectangular be equal to the side length of the cube. The air pressure is 18 kpa. The graph shows the recorded tensile force when the tensile length is 16 mm.
4.4. Grasping Different Objects
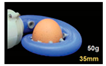
The grasping ability with different objects can be a good assessment of the performance index of the soft gripper. In order to show the ability of the soft gripper to grasp different objects, we performed the grasping experiment for the two-cavity soft gripper. The experiments show that the soft gripper has good grasping ability. When grasping soft objects with uneven surfaces, such as a variety of vegetables and fruits, it can grasp stably without hurting the surface; when grasping objects with smooth surface, such as glass bottles, coffee bars, and pens, it can also grasp stably (Figure 12). In addition, as shown in Figure 13, when we gradually increased the weight and height of the grasping object, we observed that the two-cavity SFLG with a height of 70 mm and a weight of 101.3 g could grasp a fly swatter with a height of 420 mm (Figure 13a), which is six times its own height; when grasping the SLFG, the SLFG could grasp a pipe wrench weighing 1327.4 g (Figure 13f), which is 13 times its own weight, when the connecting parts were controlled.
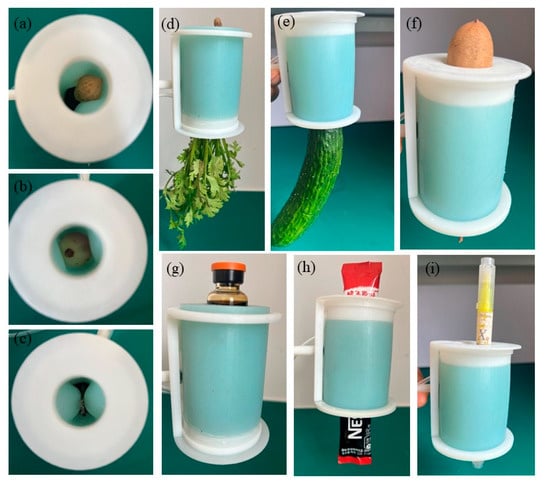
Figure 12.
Testing grasping different objects: (a) a peanut, (b) a grape, (c) a key, (d) cilantro; (e) a cucumber, (f) a caper, (g) a glass bottle, (h) a coffee bar, and (i) a pen.
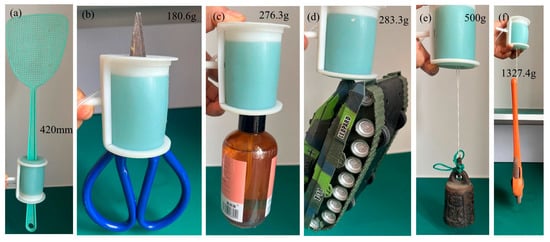
Figure 13.
Testing gripping different objects that are higher and heavier: (a) a fly swatter; (b) scissors; (c) skin lotion; (d) a toy; (e) a scale; and (f) a pipe wrench.
5. Discussion and Conclusions
5.1. Advantages and Limitations
The fingerless soft-body gripper has good gripping ability; based on the fingerless structure, we proposed a new type of soft-body gripper and designed the connectors to form the soft-body gripper. The first problem we solved was to determine the structure of the soft-body gripper. Based on the finite element method for deformation analysis, as can be seen from Figure 4 and Figure 5, different wall thicknesses inside and outside and the number of air chambers can control the deformation shape of the soft-body gripper, and the size of the air chamber angle determines the degree of deformation of the soft-body gripper. In addition, in the manufacturing process we used 3D-printing technology to manufacture and assemble the mold, and we made the fingerless soft-body gripper by pouring silicone, which has the advantages of simple manufacturing and low cost. In the experiments, the SLFG can effectively grasp objects of different sizes and shapes with a certain gripping force. Compared with other soft grippers in Table 1, the SLFG has an advantage in gripping force; next, when testing the two-cavity SLFG to grasp different objects, compared with other fingerless soft grippers, the two-cavity could grasp thin objects, such as keys, as shown in Figure 12; and it could also grasp objects of a certain height, such as a fly swatter, as shown in Figure 13. As the soft fingerless soft-body gripper has good interactivity and adaptability and is suitable for gripping small and heavy or high objects, in the future it has certain prospects for use in many fields such as picking fruits; planting vegetable seedlings, medicinal herb seedlings, etc.; and finger-massage training.
However, there are some limitations of the SLFG. The most obvious limitation is that its grasping range is constrained. Due to the size of the inner wall of the soft gripper designed in this paper, the maximum size of the grasping is affected, as shown in Figure 6. At a later stage, we will design and manufacture a large-size soft gripper structure based on the proposed fabrication process, and the design of a better rigid connector will give the soft gripper the ability to grasp the object better. In addition, the flexibility of this type of fingerless soft gripper SLFG is not as good as that of the fingered soft gripper. Therefore, the SLFGs designed in this paper are more suitable for gripping smaller and heavier objects.
5.2. Conclusions and Future Work
In the grasping operation, the innovation of grasping method and structure is very important for the research of soft-body gripper. In this paper, a soft gripper is proposed in which the deformed shape of the soft gripper can be controlled by using different inner and outer wall thicknesses and the number of air chambers, and the creation of three new SLFGs with different internal structures is proposed through changing the number of air chambers. In addition, the ability of SLFGs to grasp objects with different sizes and shapes is analyzed, and the differences in the performance of the three SLFGs are obtained. The experiments show that the two-cavity SLFG can grasp objects with uneven, soft, and smooth surfaces with a grasp size of 0 < Δ ≤ 26 mm, and that the maximum measured grasp size is 420 mm high with a weight of 1327.4 g. This study is of great significance for the further innovation of different soft-body structures and the expansion of grasping of objects of different sizes. In terms of a grasping soft-body robot, this work provides a solution and new ideas for grasping small-sized and heavier objects with soft-body grippers.
As the deformation of soft-body grippers is nonlinear and different structural parameters of the grippers cause different deformations, the issue of how to describe the effect of different sizes of the designed soft-body grippers on the deformation should be studied at a later stage. In addition, such a soft-body gripper is not flexible. We are focusing on research to improve its flexibility under the premise of guaranteeing its gripping ability and increasing its sensing function to improve its sensitivity and controllability.
Author Contributions
Conceptualization, Z.Z.; methodology, H.D.; software, S.X.; validation, S.X.; S.Z. and Z.Z.; investigation, J.W., Y.L. and R.L.; writing—original draft preparation, S.X.; writing—review and editing, S.X.; supervision, H.D.; funding acquisition, Z.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data is contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ishibashi, K.; Komagata, M.; Ishikawa, H.; Azami, O.; Yamamoto, K. Compact water pump and its application to self-contained soft robot hand for vegetable factory. Adv. Robot. 2023, 37, 970–986. [Google Scholar] [CrossRef]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft Robotic Grippers for Biological Sampling on Deep Reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef]
- Yasa, O.; Toshimitsu, Y.; Michelis, M.Y.; Jones, L.S.; Filippi, M.; Buchner, T.; Katzschmann, R.K. An Overview of Soft Robotics. Annu. Rev. Control. Robot. Auton. Syst. 2023, 6, 1–29. [Google Scholar] [CrossRef]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef]
- Hughes, J.; Culha, U.; Giardina, F.; Guenther, F.; Rosendo, A.; Iida, F. Soft Manipulators and Grippers: A Review. Front. Robot. AI 2016, 3, 69. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef]
- Jyoti, D.S.; Prabhu, S. Soft Manipulator for Soft Robotic Applications: A Review. J. Intell. Robot. Syst. 2023, 108, 10. [Google Scholar]
- Hegde, C.; Su, J.; Tan, J.M.R.; He, K.; Chen, X.; Magdassi, S. Sensing in Soft Robotics. ACS Nano 2023, 17, 15277–15307. [Google Scholar] [CrossRef] [PubMed]
- Xie, Z.; Domel, A.G.; An, N.; Green, C.; Gong, Z.; Wang, T.; Knubben, E.M.; Weaver, J.C.; Bertoldi, K.; Wen, L. Octopus Arm-Inspired Tapered Soft Actuators with Suckers for Improved Grasping. Soft Robot. 2020, 7, 639–648. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Zhang, S.; Lei, R.; Liu, Y.; Bu, W.; Wei, X.; Zhang, Z. Fluid-driven and smart material-driven research for soft body robots. Prog. Nat. Sci. Mater. Int. 2023, 33, 371–385. [Google Scholar] [CrossRef]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Marchese, A.D.; Katzschmann, R.; Rus, D.L. A Recipe for Soft Fluidic Elastomer Robots. Soft Robot. 2015, 2, 7–25. [Google Scholar] [CrossRef]
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft Robotics for Chemists. Angew. Chem. 2011, 50, 1890–1895. [Google Scholar] [CrossRef]
- Zhang, X.; Yu, S.; Dai, J.; Oseyemi, A.E.; Liu, L.; Du, N.; Lv, F. A Modular Soft Gripper with Combined Pneu-Net Actuators. Actuators 2023, 12, 172. [Google Scholar] [CrossRef]
- Wu, Y.; Zeng, G.; Xu, J.; Zhou, J.; Chen, X.; Wang, Z.; Chen, Z.; Xu, Z.; Zheng, J.; Wu, D. A bioinspired multi-knuckle dexterous pneumatic soft finger. Sens. Actuators A Phys. 2023, 350, 114105. [Google Scholar] [CrossRef]
- Wong, D.C.Y.; Li, M.; Kang, S.; Luo, L.; Yu, H. Reconfigurable, Transformable Soft Pneumatic Actuator with Tunable Three-Dimensional Deformations for Dexterous Soft Robotics Applications. Soft Robot. 2024. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef]
- Connolly, F.; Polygerinos, P.; Walsh, C.J.; Bertoldi, K. Mechanical Programming of Soft Actuators by Varying Fiber Angle. Soft Robot. 2015, 2, 26–32. [Google Scholar] [CrossRef]
- Xue, X.; Zhan, Z.; Cai, Y.; Yao, L.; Lu, Z. Design and Finite Element Analysis of Fiber-Reinforced Soft Pneumatic Actuator Intelligent Robotics and Applications. In Proceedings of the 12th International Conference, ICIRA 2019, Shenyang, China, 8–11 August 2019; Proceedings, Part I 12. Springer International Publishing: Cham, Switzerland, 2019; pp. 641–651. [Google Scholar]
- Krishna, S.; Nagarajan, T.; Rani, A.M.A. Review of Current Development of Pneumatic Artificial Muscle. J. Appl. Sci. 2011, 11, 1749–1755. [Google Scholar] [CrossRef]
- Khan, M.A.; Shaik, S.; Tariq, M.H.; Tariq, K. McKibben Pneumatic Artificial Muscle Robot Actuators—A Review. In Proceedings of the IEEE 2023 International Conference on Robotics and Automation in Industry (ICRAI), Kuala Lumpur, Malaysia, 10–12 July 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Kalita, B.; Leonessa, A.; Dwivedy, S.K. A Review on the Development of Pneumatic Artificial Muscle Actuators: Force Model and Application. Actuators 2022, 11, 288. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Chen, Y.; Wainwright, D.K.; Kenaley, C.P.; Gong, Z.; Liu, Z.; Liu, H.; Guan, J.; Wang, T.; et al. A biorobotic adhesive disc for underwater hitchhiking inspired by the remora suckerfish. Sci. Robot. 2017, 2, eaan8072. [Google Scholar] [CrossRef] [PubMed]
- Brown, E.; Rodenberg, N.; Amend, J.; Mozeika, A.; Steltz, E.; Zakin, M.R.; Lipson, H.; Jaeger, H.M. Universal robotic gripper based on the jamming of granular material. Proc. Natl. Acad. Sci. USA 2010, 107, 18809–18814. [Google Scholar] [CrossRef]
- Liu, S.; Wang, F.; Liu, Z.; Zhang, W.; Tian, Y.; Zhang, D. A Two-Finger Soft-Robotic Gripper with Enveloping and Pinching Grasping Modes. IEEE/ASME Trans. Mechatron. 2020, 26, 1. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, W.; Yu, M.; Hou, Y. Design, Fabrication, and Performance Test of a New Type of Soft-Robotic Gripper for Grasping. Sensors 2022, 22, 5221. [Google Scholar] [CrossRef]
- Wang, Z.; Kanegae, R.; Hirai, S. Circular Shell Gripper for Handling Food Products. Soft Robot. 2021, 8, 542–554. [Google Scholar] [CrossRef]
- Li, H.; Yao, J.; Zhou, P.; Chen, X.; Xu, Y.; Zhao, Y. High-Load Soft Grippers Based on Bionic Winding Effect. Soft Robot. 2019, 6, 276–288. [Google Scholar] [CrossRef]
- Hao, Y.; Biswas, S.; Hawkes, E.W.; Wang, T.; Zhu, M.; Wen, L.; Visell, Y. A Multimodal, Enveloping Soft Gripper: Shape Conformation, Bioinspired Adhesion, and Expansion-Driven Suction. IEEE Trans. Robot. 2020, 37, 350–362. [Google Scholar] [CrossRef]
- Wang, D.; Wu, X.J.; Zhang, J.H.; Du, Y.Y. A Pneumatic Novel Combined Soft Robotic Gripper with High Load Capacity and Large Grasping Range. Actuators 2022, 11, 3. [Google Scholar] [CrossRef]
- Jiang, H.; Liu, X.; Chen, X.; Wang, Z.; Jin, Y.; Chen, X. Design and Simulation Analysis of a Soft Manipulator Based on Honeycomb Pneumatic Networks. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Bangkok, Thailand, 5–9 December 2016; IEEE: Piscataway, NJ, USA; pp. 350–356. [Google Scholar] [CrossRef]
- Hao, T.; Xiao, H.; Liu, S.; Gu, J. Flexible and stable grasping by multi-jointed pneumatic actuator mimicking the human finger-impacts of structural parameters on performance. Smart Mater. Struct. 2021, 30, 125019. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).