
Integrated Security Control for Nonlinear CPS with Actuator Fault and FDI Attack: An Active Attack-Tolerant Approach

Abstract
1. Introduction
2. Problem Formulation
2.1. Framework of Integrated Security Control
2.2. System Description
3. Design of Robust Observer
3.1. Establishment of Augmented Error System
3.2. Design Method of Robust Observer
4. Design of Integrated Security Controller
4.1. Establishment of Closed-Loop Nonlinear CPS Model
4.2. Co-Design of Integrated Security Control and Communication
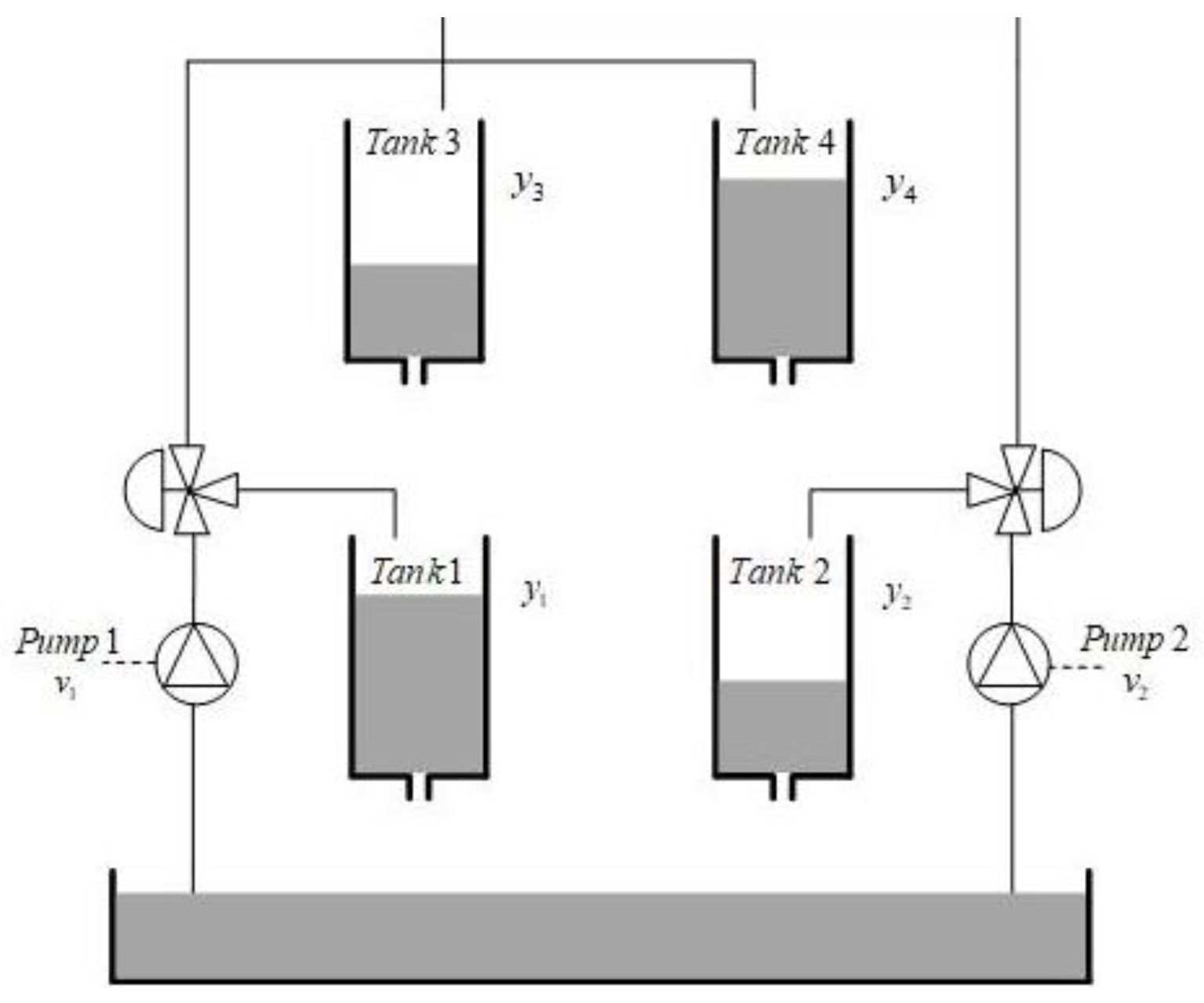
5. Simulation and Analysis
5.1. The Values of the Correlation Matrices
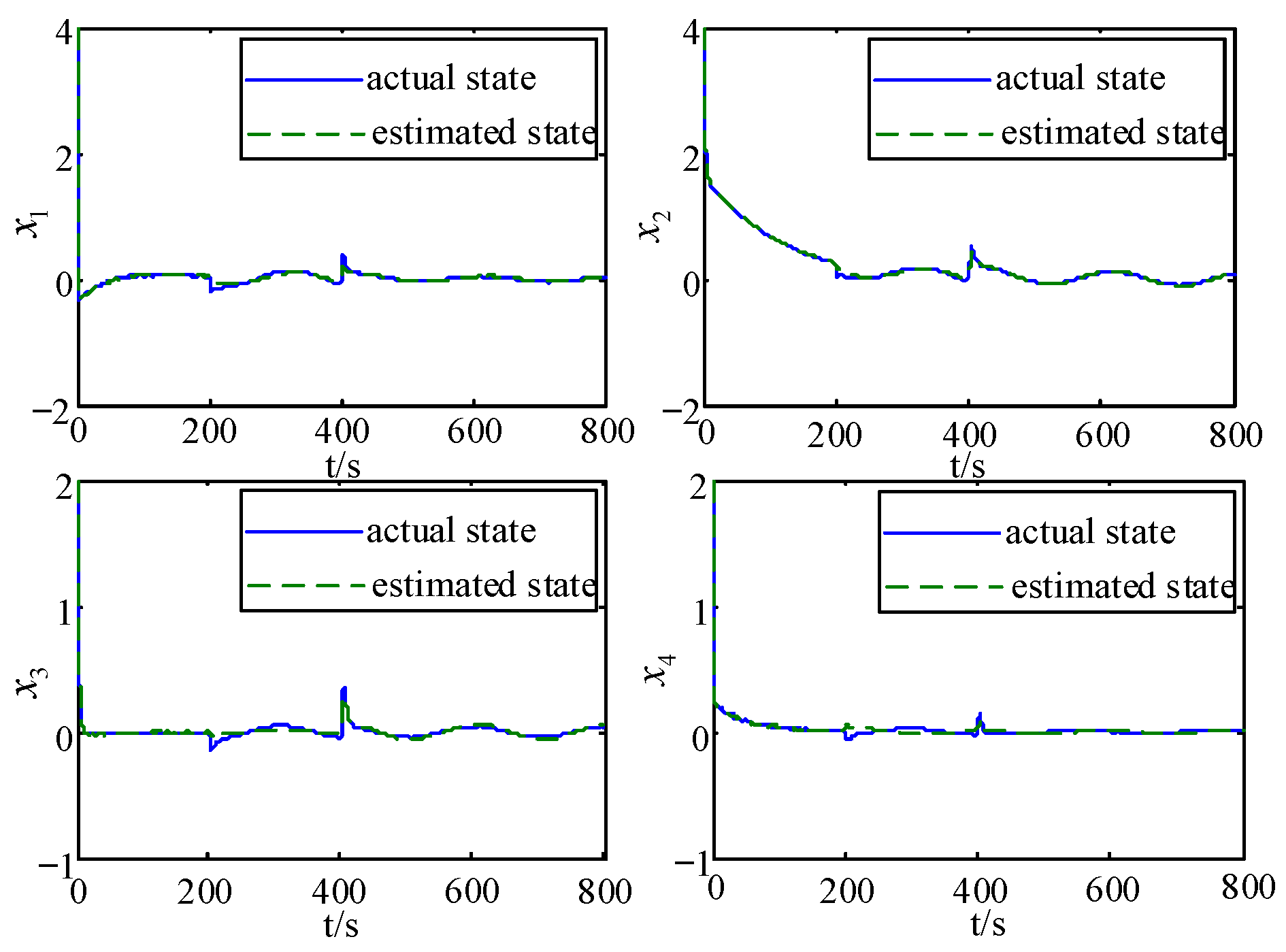
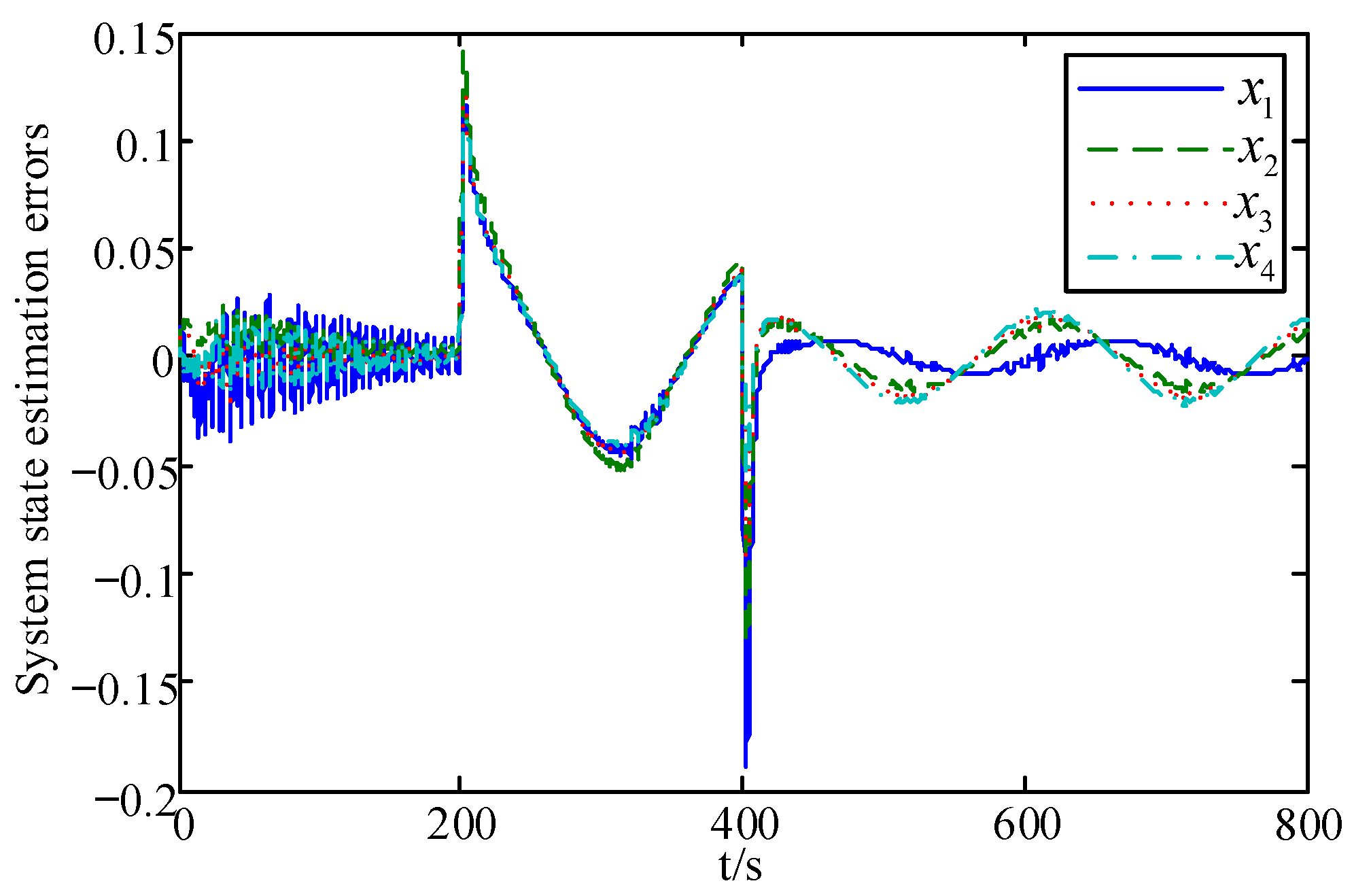
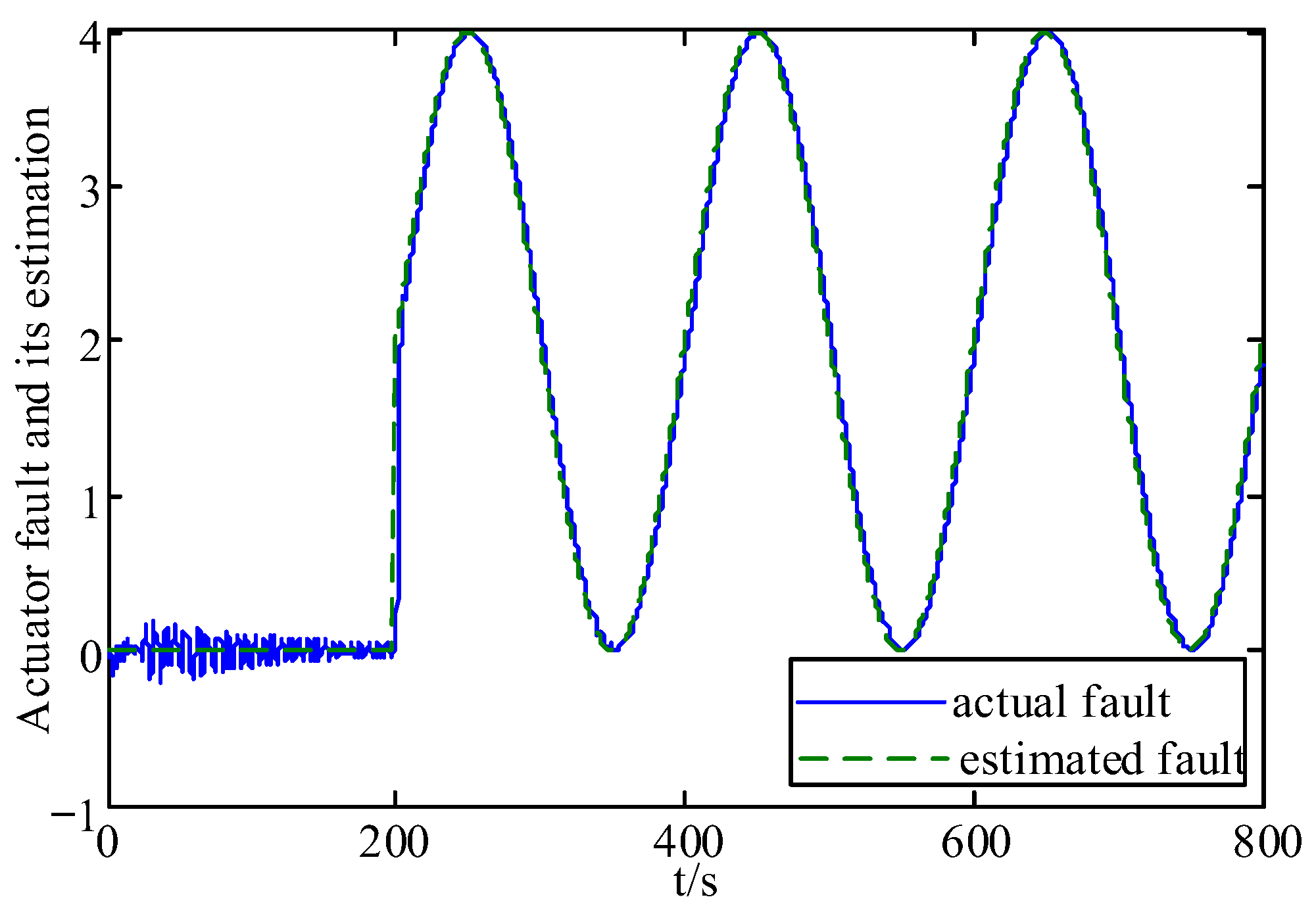
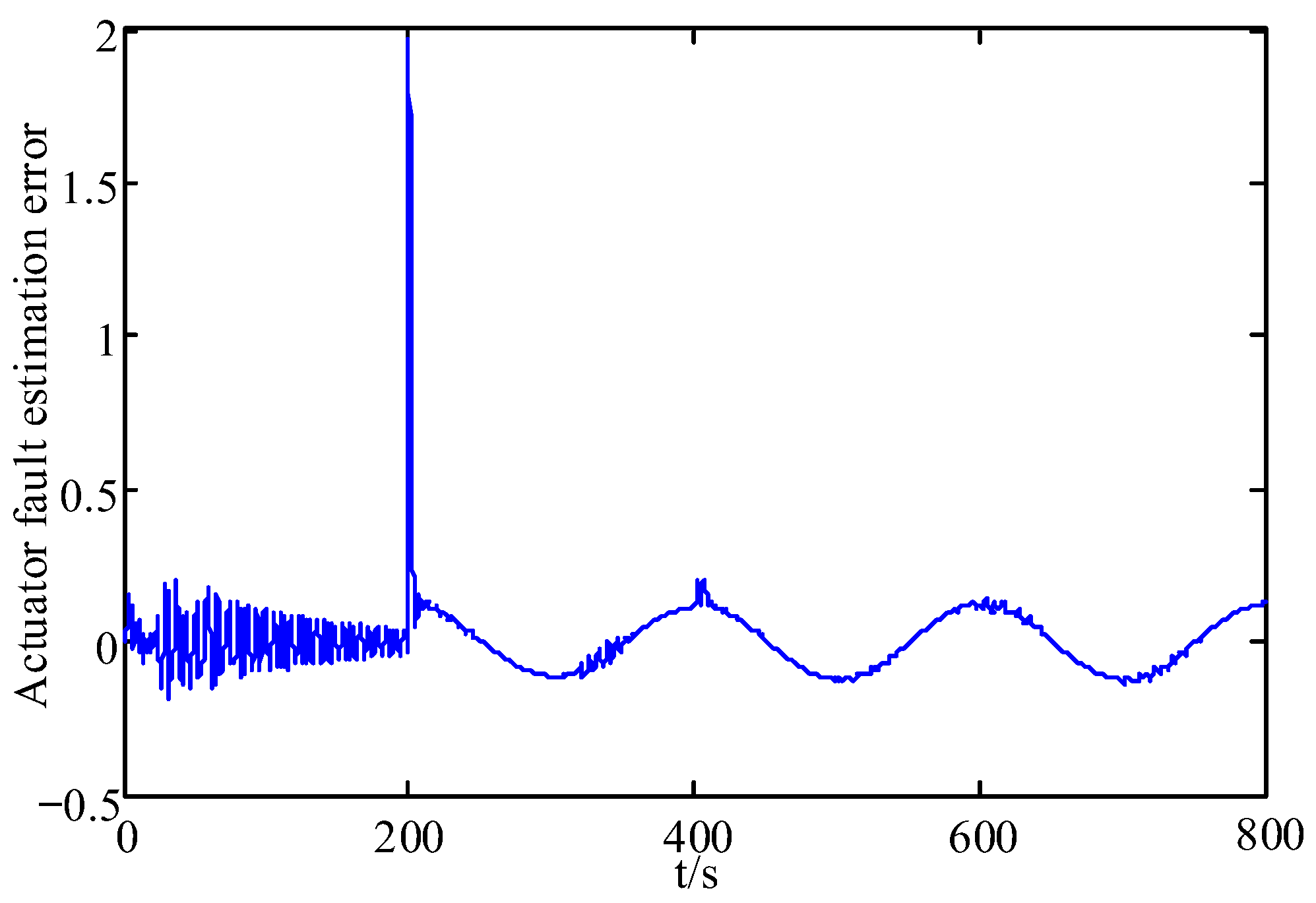
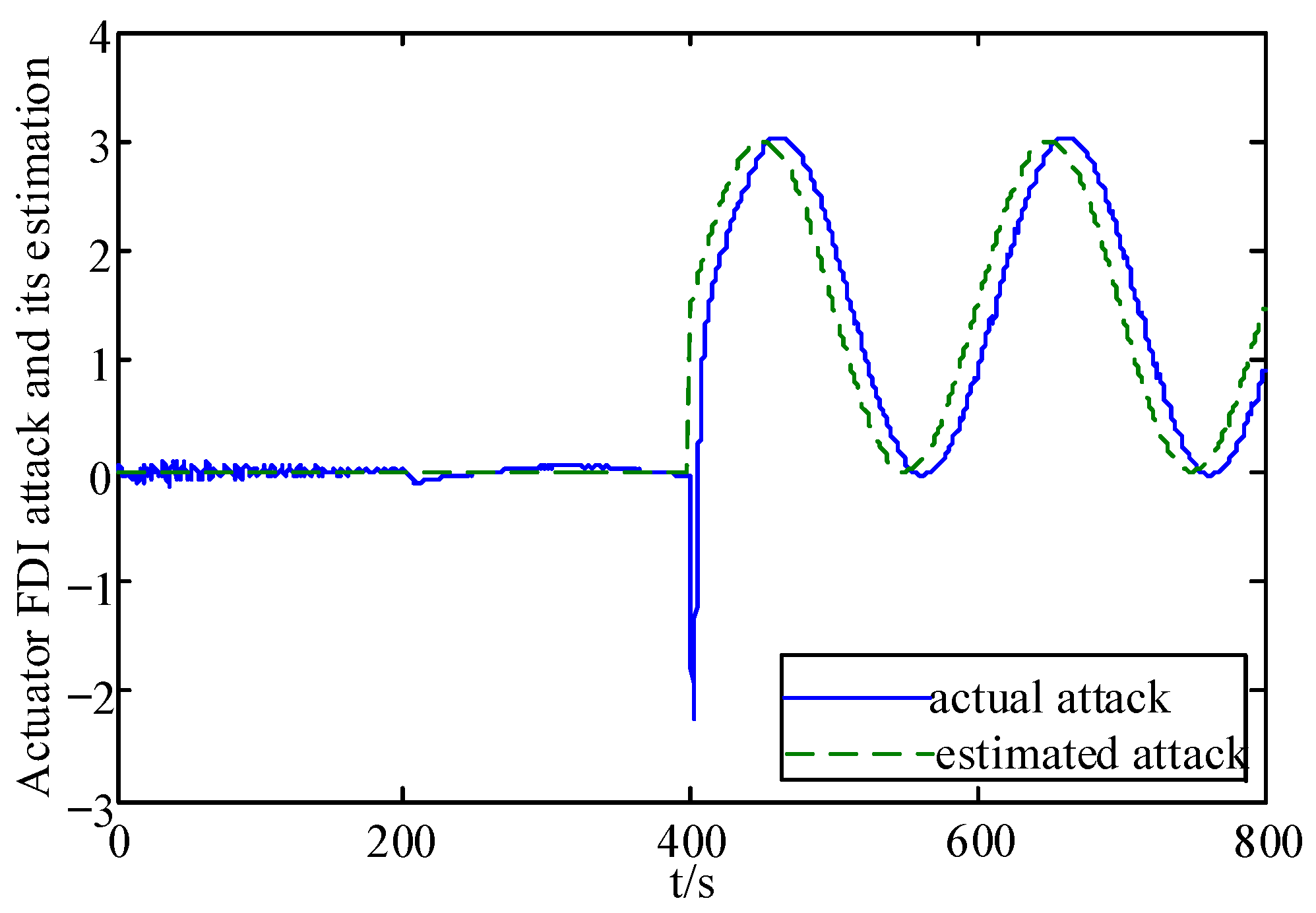
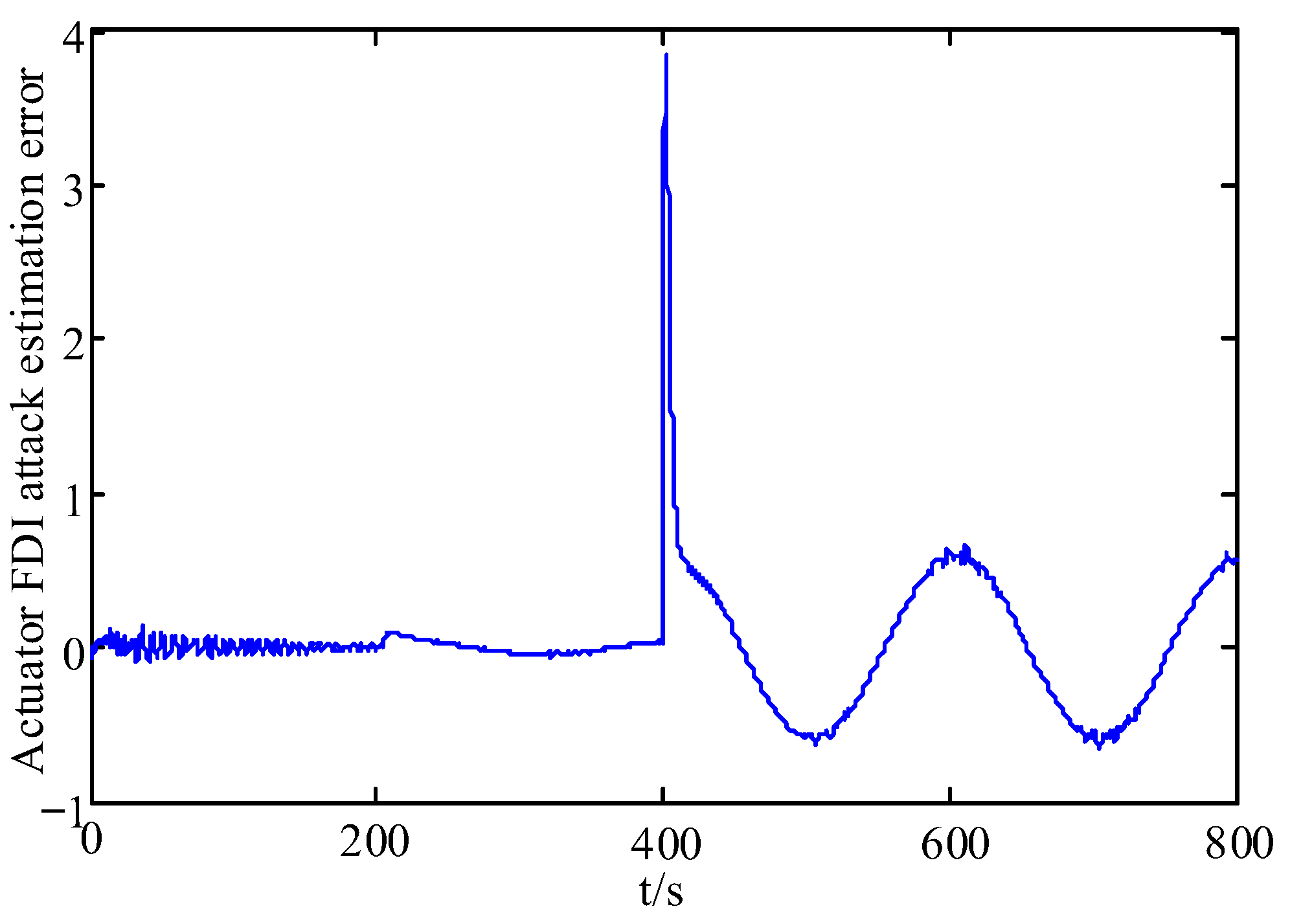
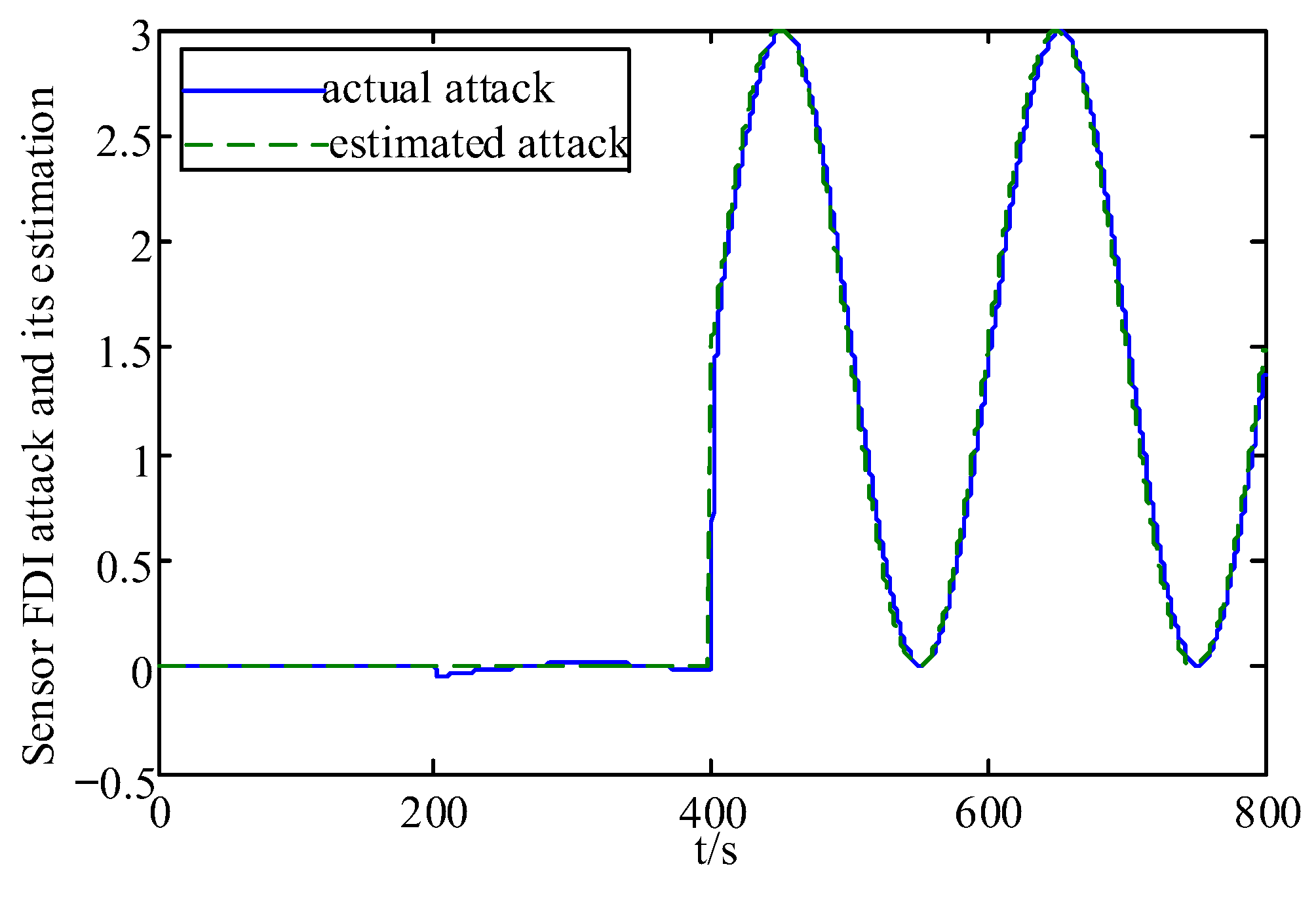
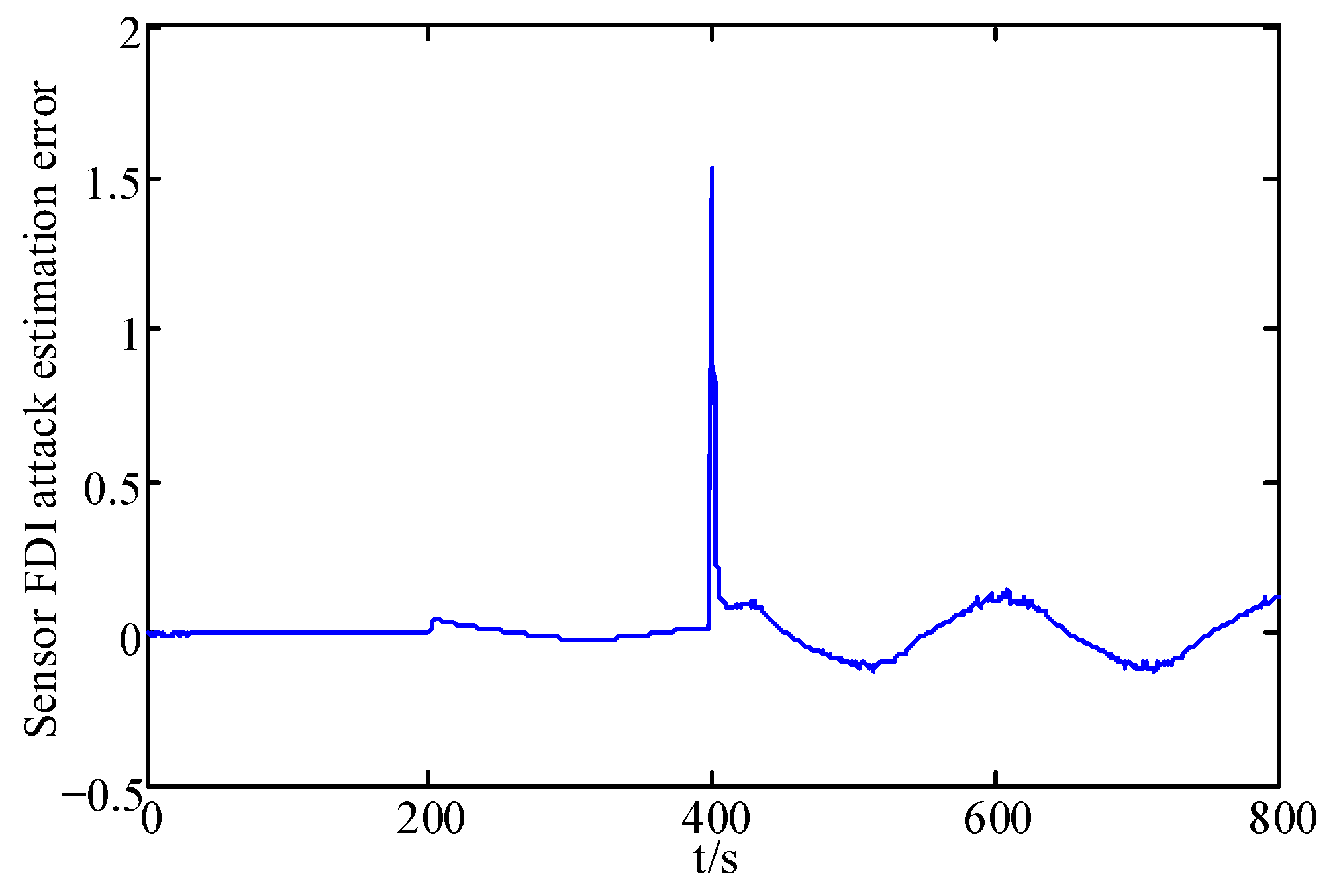
5.2. Estimation of System State, FDI Attacks and Actuator Fault
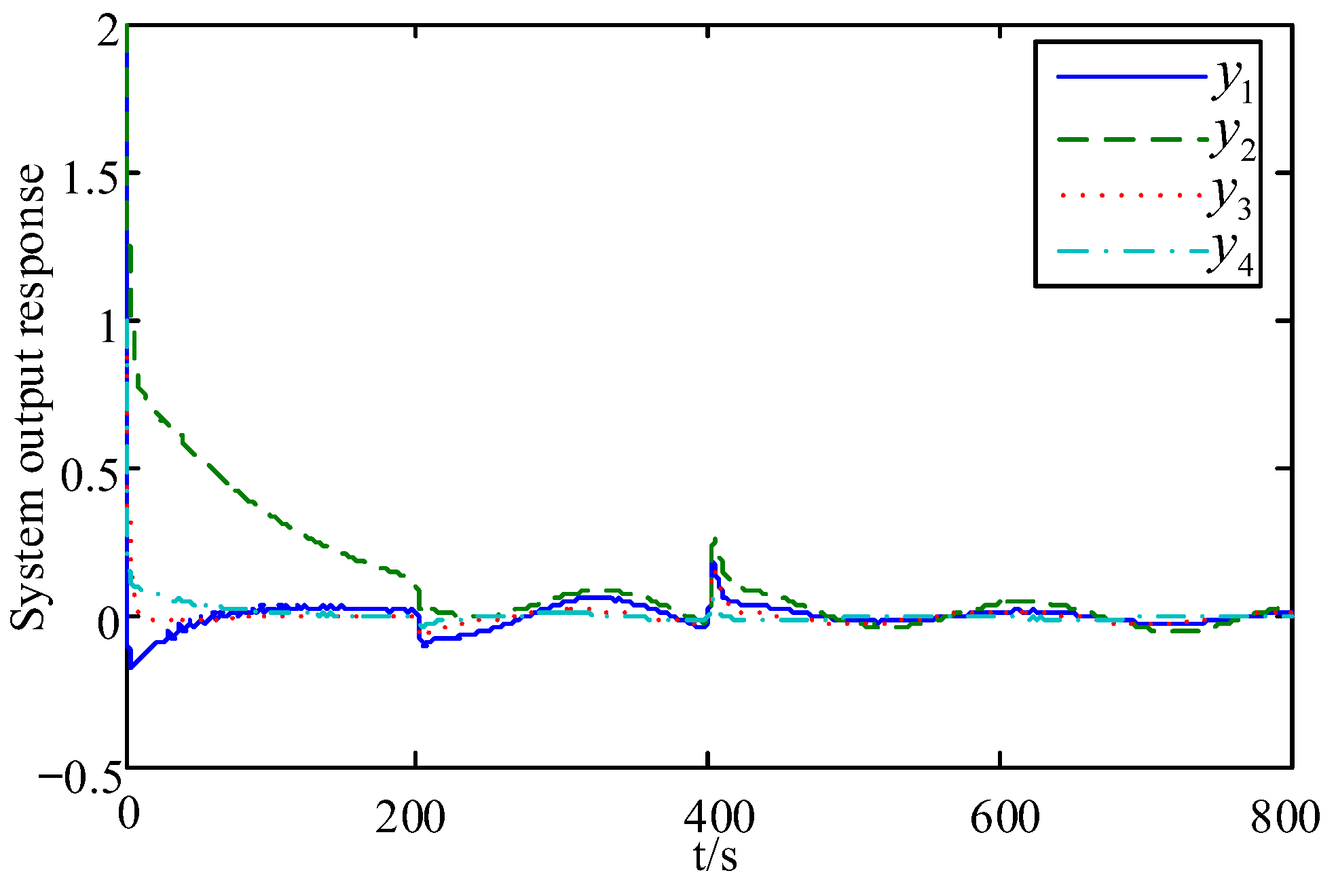
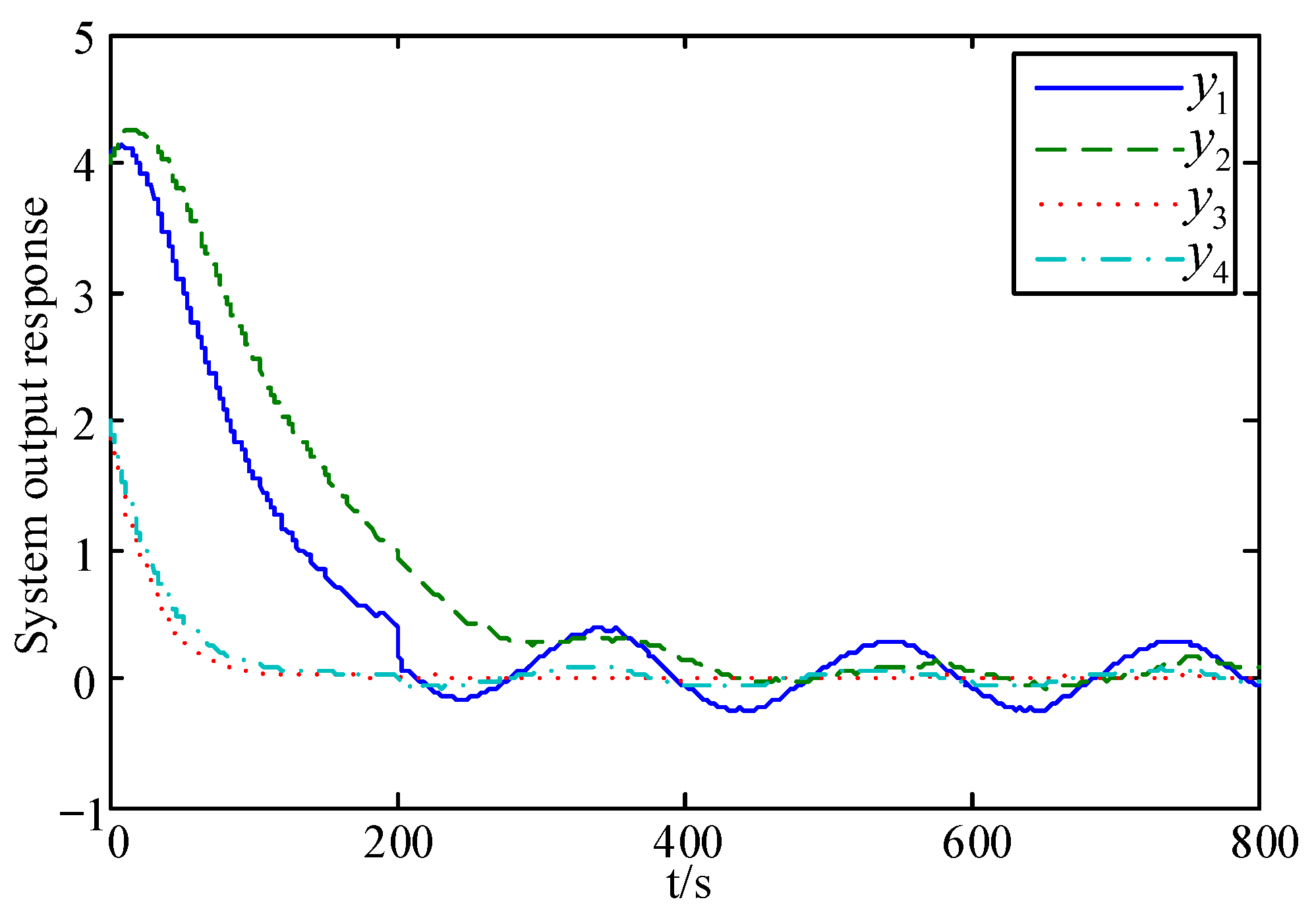
5.3. Comparison and Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, D.; Wang, Q.G.; Feng, G.; Shi, Y.; Vasilakos, A.V. A survey on attack detection, estimation and control of industrial cyber-physical systems. ISA Trans. 2021, 116, 1–16. [Google Scholar] [CrossRef]
- Peng, C.; Sun, H.; Yang, M.; Wang, Y.L. A survey on security communication and control for smart grids under malicious cyber attacks. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1554–1569. [Google Scholar] [CrossRef]
- Ding, D.; Han, Q.L.; Xiang, Y.; Ge, X.; Zhang, X.M. A survey on security control and attack detection for industrial cyber-physical systems. Neurocomputing 2019, 275, 1674–1683. [Google Scholar] [CrossRef]
- Zhang, K.; Keliris, C.; Polycarpou, M.M.; Parisini, T. Discrimination between replay attacks and sensor faults for cyber-physical systems via event-triggered communication. Eur. J. Control. 2021, 62, 47–56. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, X.; Liang, Z.; Li, W.; Wang, X.; Wong, P.K. Adaptive event-based robust passive fault tolerant control for nonlinear lateral stability of autonomous electric vehicles with asynchronous constraints. ISA Trans. 2021, 127, 310–323. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Fei, Z.; Wang, Z.; Liu, X. Event-triggered fault estimation and fault-tolerant control for networked control systems. J. Frankl. Inst. 2019, 356, 4420–4441. [Google Scholar] [CrossRef]
- Shang, Y. Resilient group consensus in heterogeneously robust networks with hybrid dynamics. Math. Methods Appl. Sci. 2020, 44, 1456–1469. [Google Scholar] [CrossRef]
- Shang, Y. Resilient tracking consensus over dynamic random graphs: A linear system approach. Eur. J. Appl. Math. 2022, 34, 408–423. [Google Scholar] [CrossRef]
- Shang, Y. Median-Based Resilient Consensus Over Time-Varying Random Networks. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 1203–1207. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, K.; An, Y.; Luo, H.; Yin, S. An Integrated Multitasking Intelligent Bearing Fault Diagnosis Scheme Based on Representation Learning Under Imbalanced Sample Condition. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–12. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, C.; Chow, M.-Y.; Li, X.; Tian, J.; Luo, H.; Yin, S. A Data-model Interactive Remaining Useful Life Prediction Approach of Lithium-ion Batteries Based on PF-BiGRU-TSAM. IEEE Trans. Ind. Inform. 2023, 1–11. [Google Scholar] [CrossRef]
- Zhang, J.; Li, X.; Tian, J.; Jiang, Y.; Luo, H.; Yin, S. A variational local weighted deep sub-domain adaptation network for remaining useful life prediction facing cross-domain condition. Reliab. Eng. Syst. Saf. 2023, 231, 108986. [Google Scholar] [CrossRef]
- Li, Y.J.; Li, W. Co-design between α/H∞ fault-tolerant control of networked control system and network communication. J. Jilin Univ. (Eng. Technol. Ed.) 2016, 46, 2010–2020. [Google Scholar]
- Qiu, A.; Zhang, J.; Jiang, B.; Gu, J. Event-triggered sampling and fault-tolerant control co-design based on fault diagnosis observer. J. Syst. Eng. Electron. 2018, 29, 176–186. [Google Scholar] [CrossRef]
- Wang, J.; Li, S.Z.; Li, W. Hybrid active-passive robust fault-tolerant control for a networked control system based on an event-triggered scheme. Inf. Control. 2017, 46, 144–152. [Google Scholar]
- Xu, F.; Tan, J.; Wang, X.; Puig, V.; Liang, B.; Yuan, B. Mixed active/passive robust fault detection and isolation using set-theoretic unknown input observers. IEEE Trans. Autom. Sci. Eng. 2017, 15, 863–871. [Google Scholar] [CrossRef]
- Zuo, Z.Q.; Cao, X.; Wang, Y.J. Security control of multi-agent systems under false data injection attacks. Neurocomputing 2020, 404, 240–246. [Google Scholar] [CrossRef]
- Lei, L.; Yang, W.; Yang, C. Event-based distributed state estimation over a WSN with false data injection attack. IFAC Pap. 2016, 49, 286–290. [Google Scholar] [CrossRef]
- Huang, X.; Dong, J.X. A robust dynamic compensation approach for cyber-physical systems against multiple types of actuator attacks. Appl. Math. Comput. 2020, 380, 125–284. [Google Scholar] [CrossRef]
- An, L.W.; Yang, G.H. Improved adaptive resilient control against sensor and actuator attacks. Inf. Sci. 2018, 423, 145–156. [Google Scholar] [CrossRef]
- Sun, Z.; Xue, W.; Liu, J.; Chen, F.; Lu, X. Adaptive event-triggered resilient control of industrial cyber physical systems under asynchronous data injection attack. J. Frankl. Inst. 2022, 359, 3000–3023. [Google Scholar] [CrossRef]
- Chen, C.; Chen, Y.; Zhao, J.; Zhang, K.; Ni, M.; Ren, B. Data-Driven Resilient Automatic Generation Control Against False Data Injection Attacks. IEEE Trans. Ind. Inform. 2021, 17, 8092–8101. [Google Scholar] [CrossRef]
- Tang, B.; Yan, J.; Kay, S.; He, H. Detection of false data injection attacks in smart grid under colored gaussian noise. In Proceedings of the 2016 IEEE Conference on Communications and Network Security (CNS), Philadelphia, PA, USA, 17–19 October 2016; pp. 172–179. [Google Scholar]
- Xiong, X.; Hu, S.; Sun, D.; Hao, S.; Li, H.; Lin, G. Detection of false data injection attack in power information physical system based on SVM-GAB algorithm. Energy Rep. 2022, 8, 1156–1164. [Google Scholar] [CrossRef]
- Pang, Z.H.; Fan, L.Z.; Sun, J.; Liu, K.; Liu, G.P. Detection of stealthy false data injection attacks against networked control systems via active data modification. Inf. Sci. 2021, 546, 192–205. [Google Scholar] [CrossRef]
- Wu, S.; Jiang, Y.; Luo, H.; Zhang, J.; Yin, S.; Kaynak, O. An integrated data-driven scheme for the defense of typical cyber–physical attacks. Reliab. Eng. Syst. Saf. 2022, 220, 108257. [Google Scholar] [CrossRef]
- Hu, L.; Wang, Z.; Han, Q.L.; Liu, X. State estimation under false data injection attacks: Security analysis and system protection. Automatica 2018, 87, 176–183. [Google Scholar] [CrossRef]
- Li, F.F.; Tang, Y. False data injection attack for cyber-physical systems with resource constraint. IEEE Trans. Cybern. 2020, 50, 729–738. [Google Scholar] [CrossRef]
- Ao, W.; Song, Y.; Wen, C.; Lai, J. Finite time attack detection and supervised secure state estimation for CPSs with malicious adversaries. Inf. Sci. 2018, 451–452, 67–82. [Google Scholar] [CrossRef]
- Li, W.; Shi, Y.H.; Li, Y.J. Research on secure control and communication for cyber-physical systems under cyber-attacks. Trans. Inst. Meas. Control. 2019, 41, 3421–3437. [Google Scholar] [CrossRef]
- Zhao, L.; Li, W. Co-design of dual security control and communication for nonlinear CPS under FDI attacks. Meas. Control. 2022, 55, 767–782. [Google Scholar] [CrossRef]
- Yaseen, A.A.; Bayart, M. Cyber-attack detection with fault accommodation based on intelligent generalized predictive control. IFAC Pap. 2017, 50, 2601–2608. [Google Scholar] [CrossRef]
- Li, Y.J.; Wu, Q.E.; Peng, L. Simultaneous event-triggered fault detection and estimation for stochastic systems subject to deception attacks. Sensors 2018, 18, 321. [Google Scholar] [CrossRef]
- Ye, D.; Luo, S.P. A co-design methodology for cyber-physical systems under actuator fault and cyber attack. J. Frankl. Inst. 2019, 356, 1856–1879. [Google Scholar] [CrossRef]
- Peng, C.; Han, Q.-L.; Yue, D. To Transmit or Not to Transmit: A Discrete Event-Triggered Communication Scheme for Networked Takagi–Sugeno Fuzzy Systems. IEEE Trans. Fuzzy Syst. 2012, 21, 164–170. [Google Scholar] [CrossRef]
- Lu, A.Y.; Yang, G.H. Event-triggered secure observer-based control for cyber-physical systems under adversarial attacks. Inf. Sci. 2017, 420, 96–109. [Google Scholar] [CrossRef]
- Xiao, H.Q.; He, Y.; Wu, M.; Xiao, S.P. H∞ output tracking control for sampled-data networked control systems in T-S fuzzy model. Acta Autom. Sin. 2015, 41, 661–668. [Google Scholar]
- Liu, K.; Fridman, E. Wirtinger’s inequality and Lyapunov-based sampled-data stabilization. Automatica 2012, 48, 102–108. [Google Scholar] [CrossRef]
- Lee, W.I.; Lee, S.Y.; Park, P.G. Affine bessel-legendre inequality: Application to stability analysis for systems with time-varying delays. Automatica 2018, 93, 535–539. [Google Scholar] [CrossRef]
- Park, P.G.; Ko, J.W.; Jeong, C. Reciprocally convex approach to stability of systems with time-varying delays. Automatica 2011, 47, 235–238. [Google Scholar] [CrossRef]
- Johansson, H.K. The quadruple-tank process: A multivariable laboratory process with an adjustable zero. IEEE Trans. Control. Syst. Technol. 2000, 8, 456–465. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | n | ||
|---|---|---|---|
| Active attack tolerance in this paper | 1125 | 14.1% | 0.711 s |
| Active–passive attack tolerance in [31] | 1249 | 15.6% | 0.641 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Li, W.; Li, Y.; Han, N.; Zheng, N. Integrated Security Control for Nonlinear CPS with Actuator Fault and FDI Attack: An Active Attack-Tolerant Approach. Actuators 2023, 12, 216. https://doi.org/10.3390/act12050216
Zhao L, Li W, Li Y, Han N, Zheng N. Integrated Security Control for Nonlinear CPS with Actuator Fault and FDI Attack: An Active Attack-Tolerant Approach. Actuators. 2023; 12(5):216. https://doi.org/10.3390/act12050216
Chicago/Turabian StyleZhao, Li, Wei Li, Yajie Li, Nani Han, and Naiqin Zheng. 2023. "Integrated Security Control for Nonlinear CPS with Actuator Fault and FDI Attack: An Active Attack-Tolerant Approach" Actuators 12, no. 5: 216. https://doi.org/10.3390/act12050216
APA StyleZhao, L., Li, W., Li, Y., Han, N., & Zheng, N. (2023). Integrated Security Control for Nonlinear CPS with Actuator Fault and FDI Attack: An Active Attack-Tolerant Approach. Actuators, 12(5), 216. https://doi.org/10.3390/act12050216