
Fractional Derivative Viscosity of ANCF Cable Element


Abstract
1. Introduction
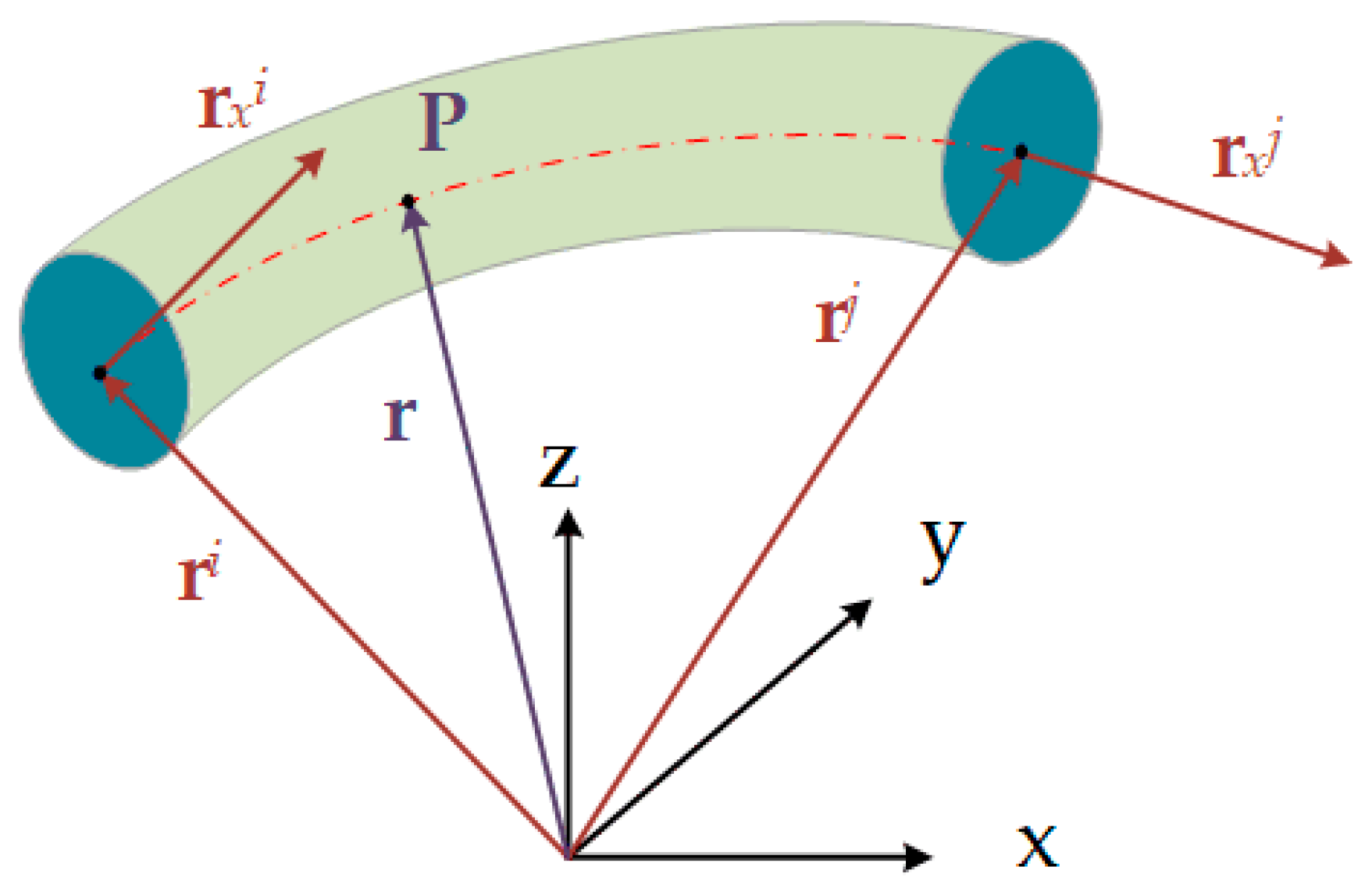
2. Element Kinematic Description
3. Element Elastic Model
4. Fractional Derivative Cable Damping
5. Computation Strategy
6. Numerical Simulation and Experimental Validation
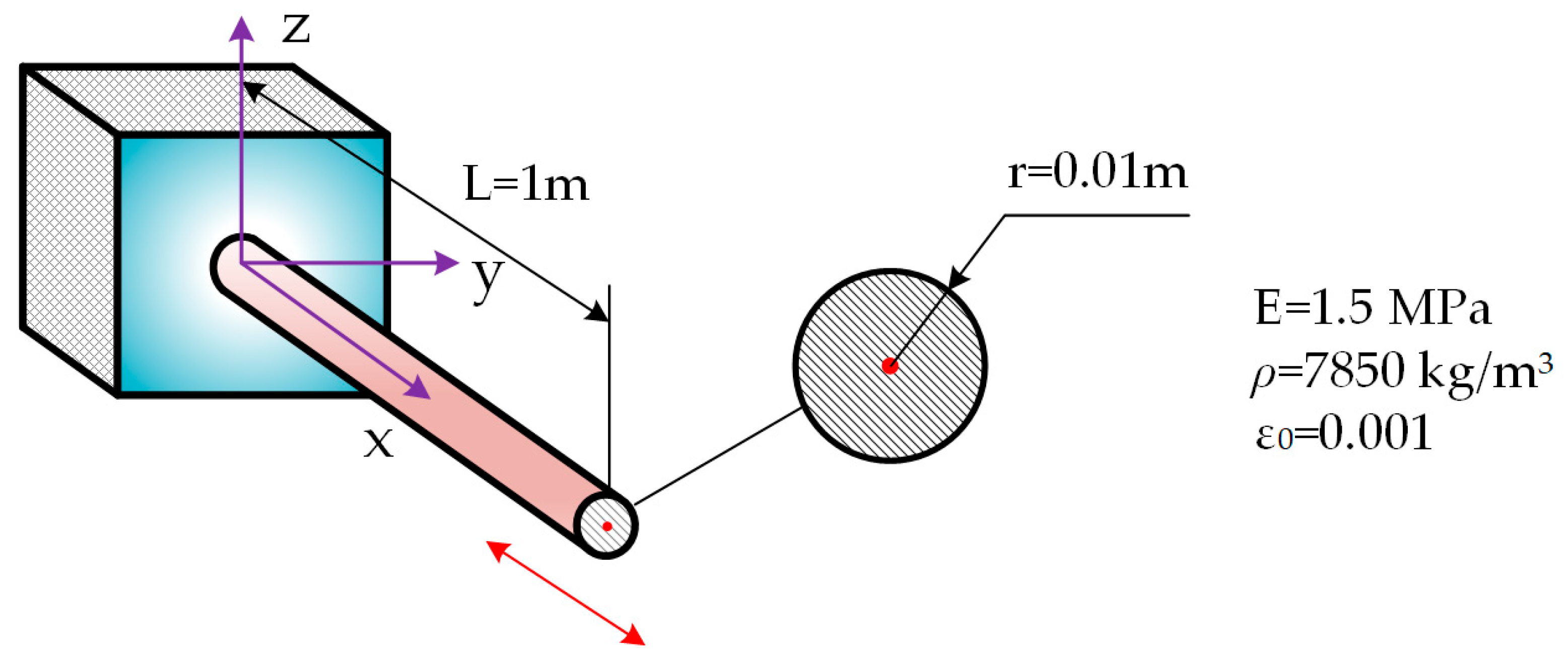
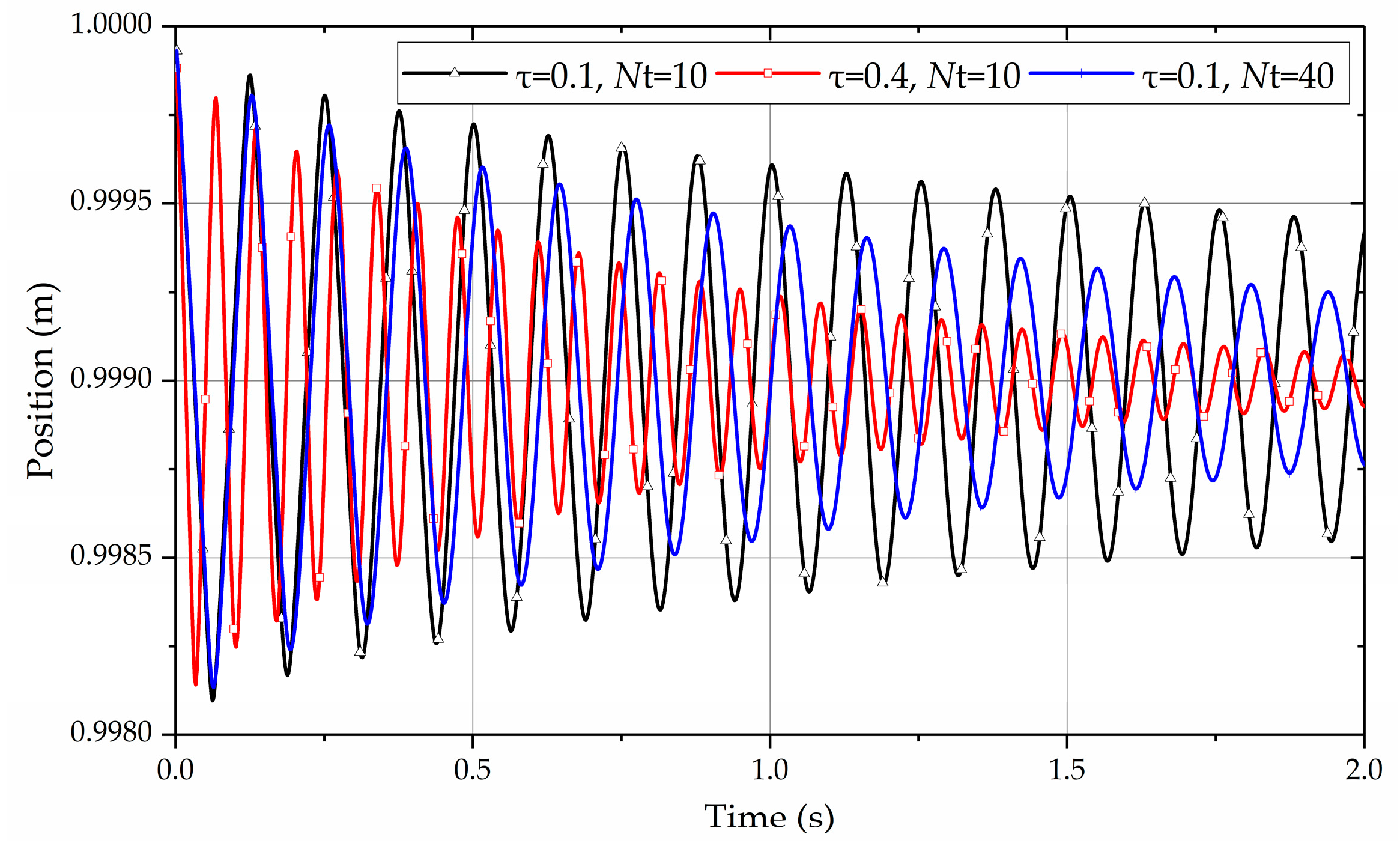
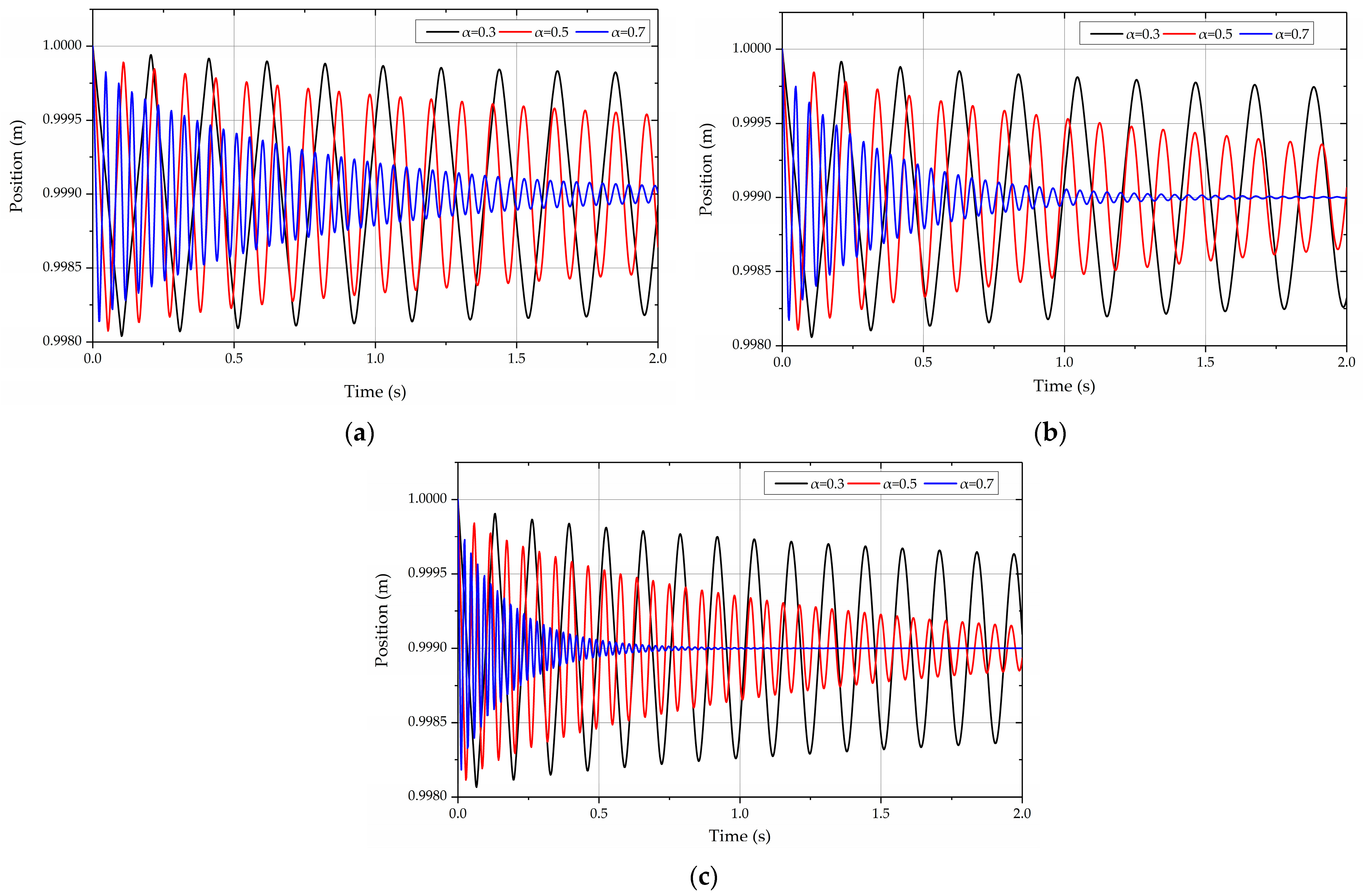
6.1. Axial Stretch of Beam
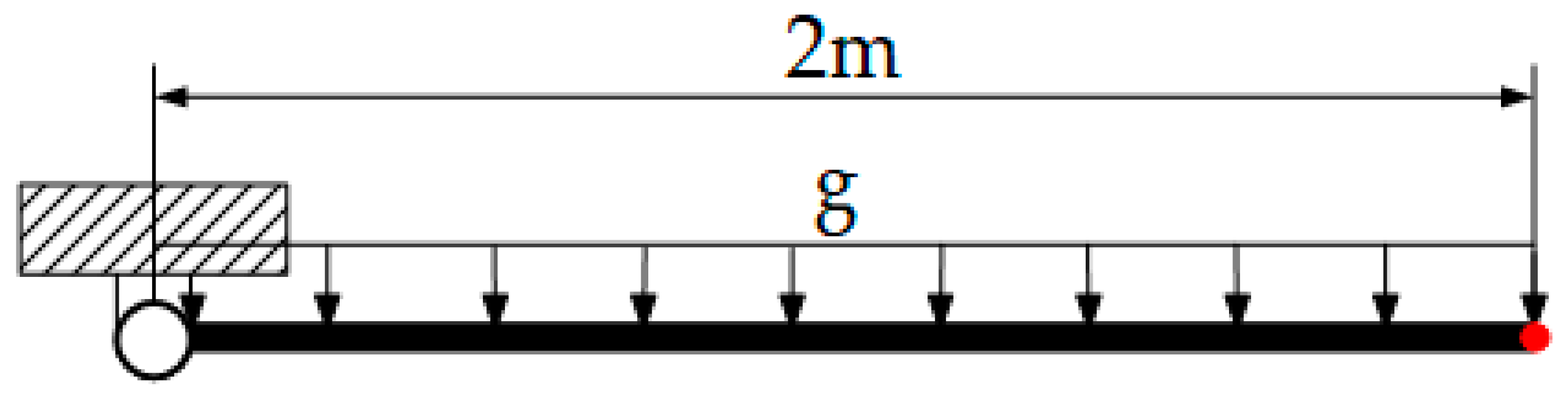
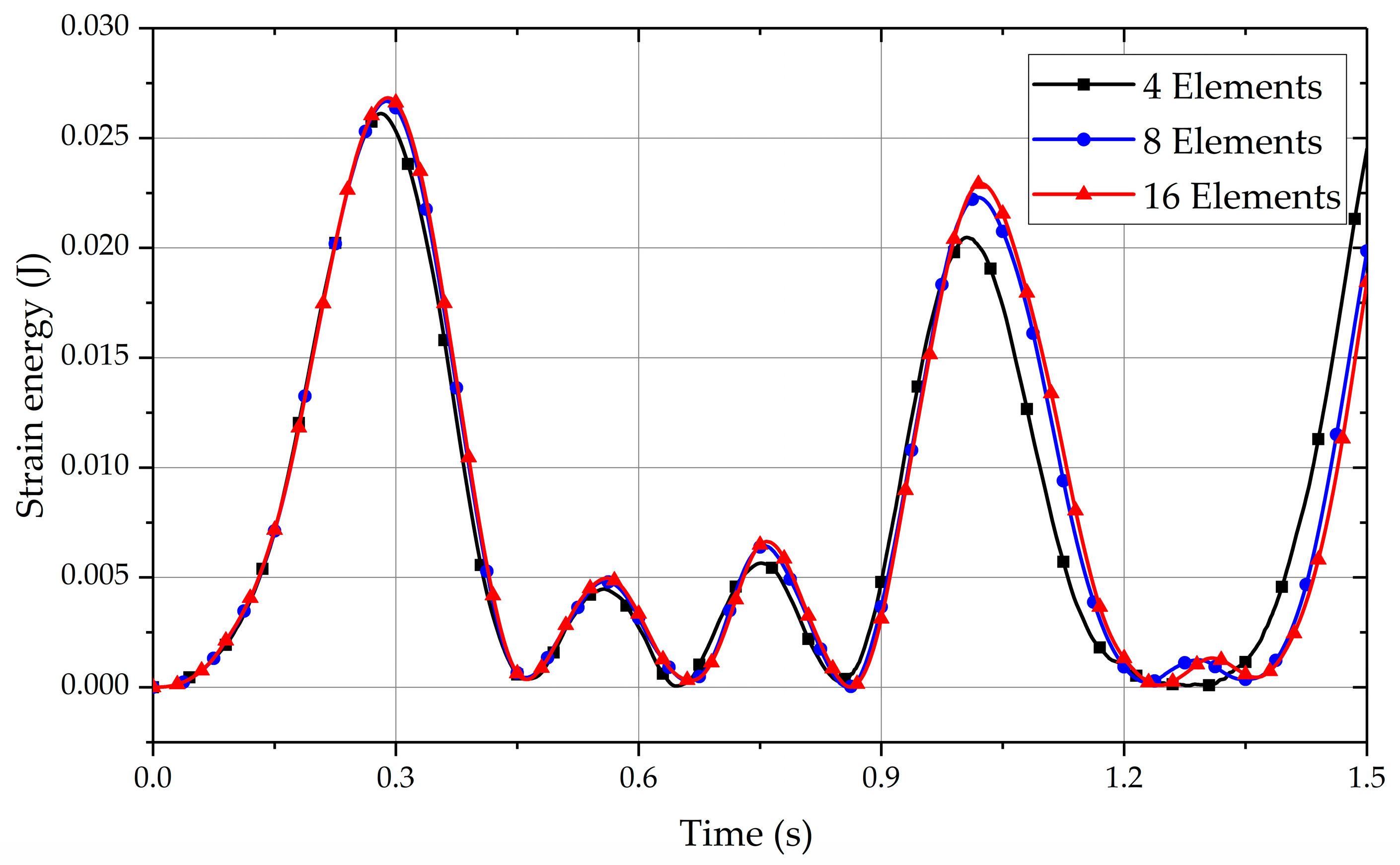
6.2. Flexible Pendulum
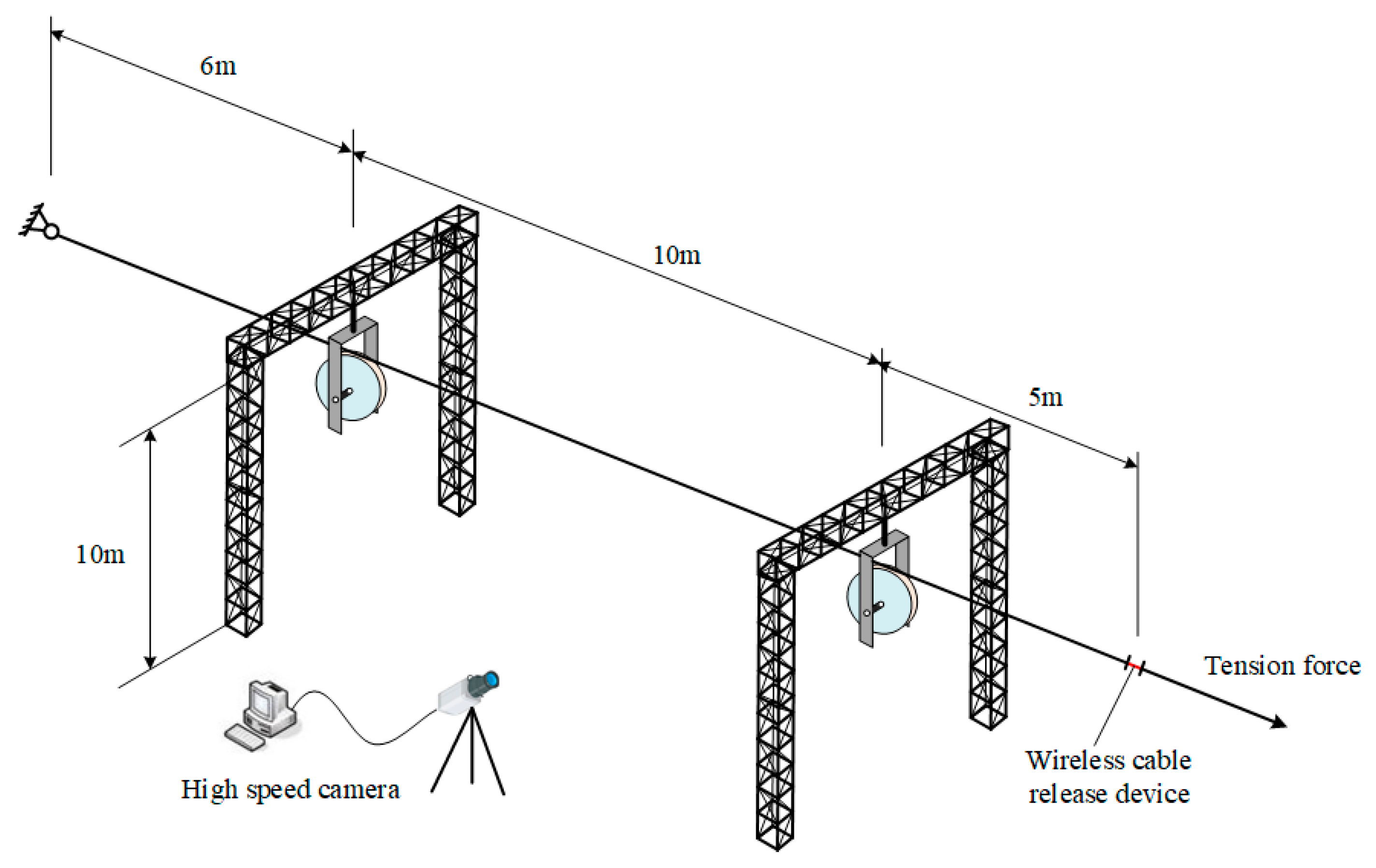
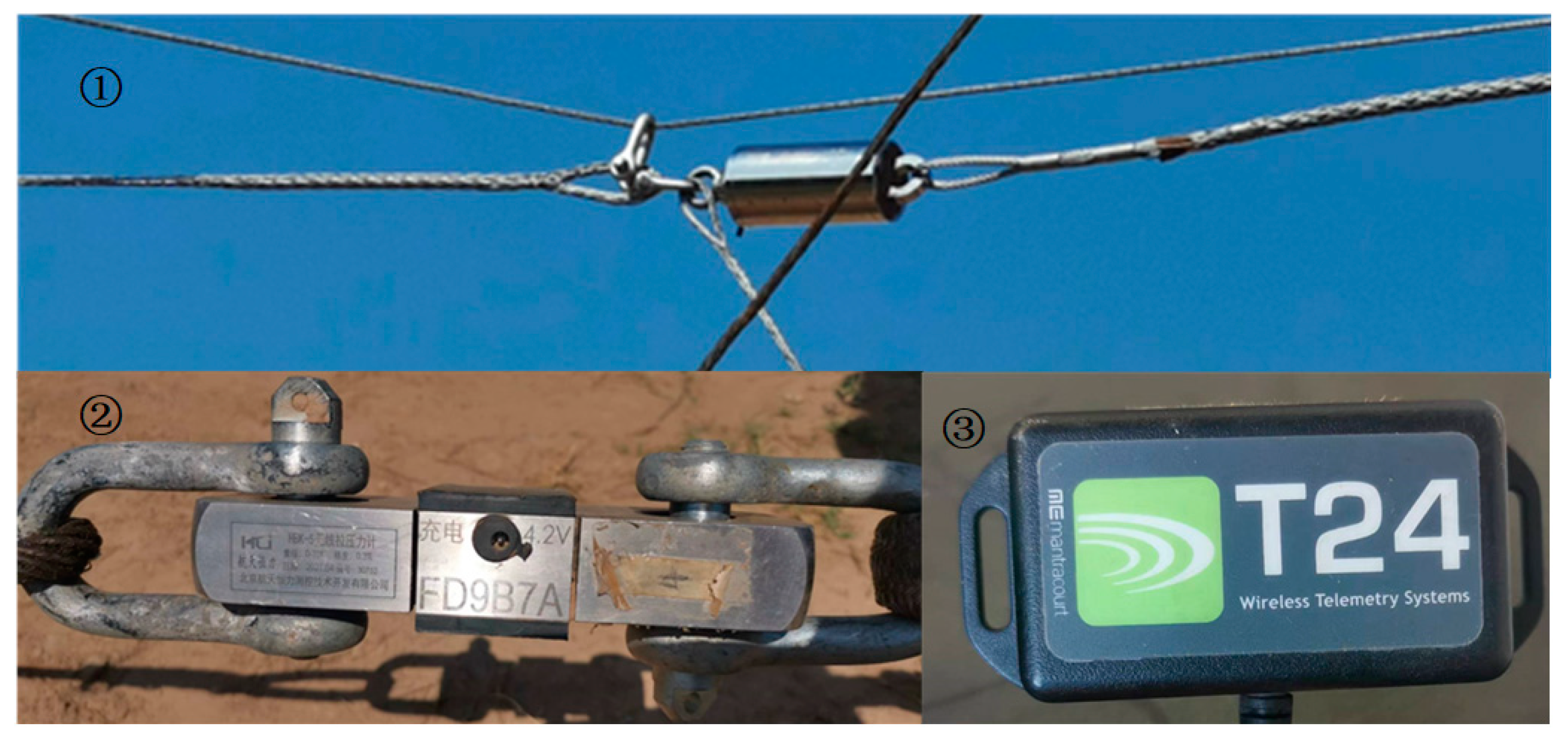
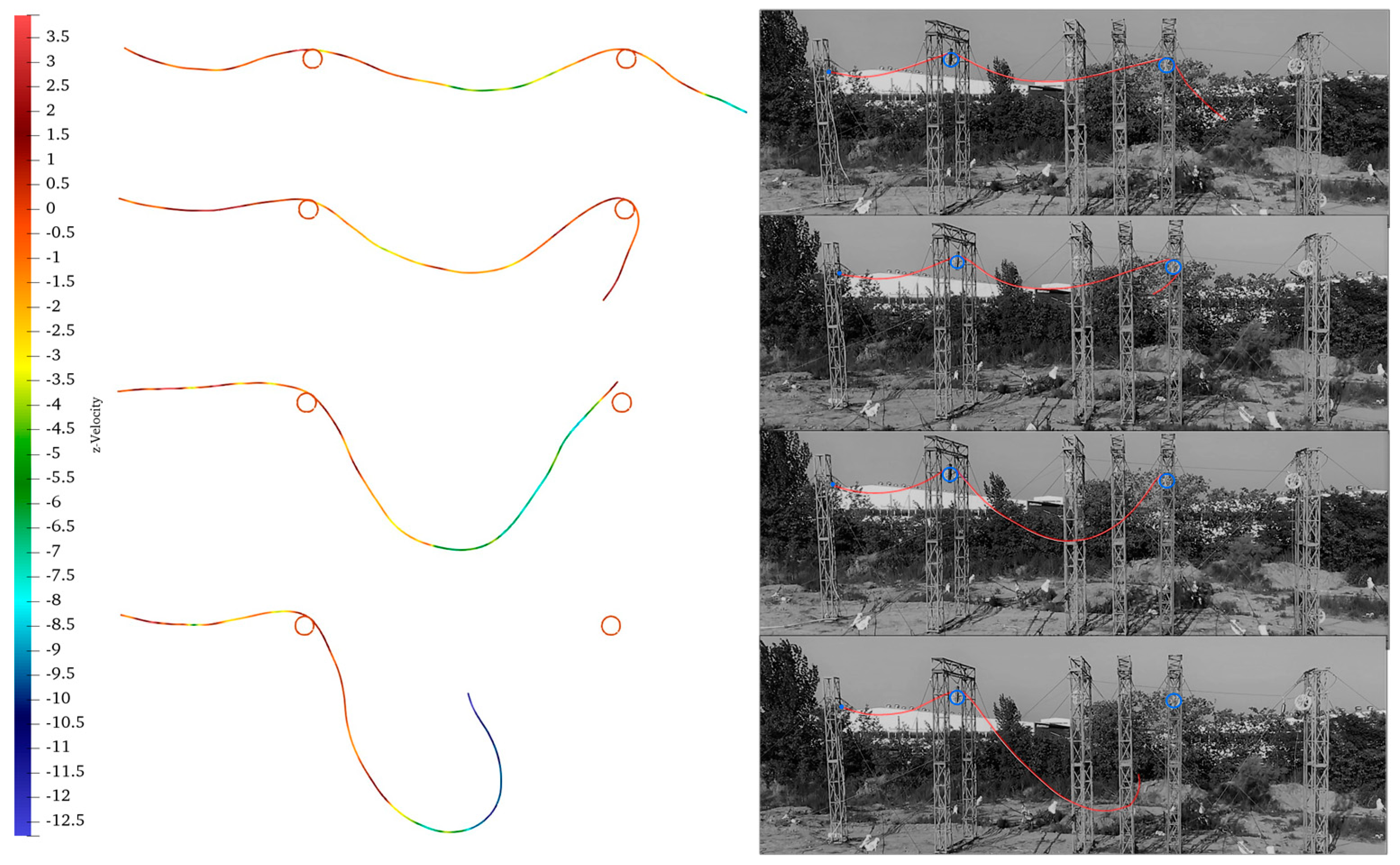
6.3. Wire–Sheave Contact Experiment and Computational Simulation
7. Conclusions
- The fractional order derivative material damping model based on three-parameter formulation is introduced into the ANCF cable element. The generalized damping force and its Jacobian matrix with respect to the nodal coordinate are derived accordingly.
- A cantilever beam with an initial longitudinal stretching strain is tested. The results show that the damping effect becomes more obvious with the increase in the viscoelastic coefficient , truncation number and derivative order .
- A soft pendulum model is checked to see the performance of the proposed damping model. It can be observed that when the number of elements used increases, the curves of the vertical displacement of the free tip and the total strain energy become closer. The convergence property is proved.
- An experiment of wire tension release is performed. A wire goes through two sheaves and is tensioned by 10% of its breaking force. After it is released, it vibrates tempestuously and falls onto the sheaves. The configurations of the wire are captured by a high-speed camera and compared with the simulation results. The application of the proposed cable damping model based on the fractional derivative viscosity can be demonstrated.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| r | the global position of an arbitrary point on the cable |
| S | the shape function matrix |
| e | the nodal coordinate vector |
| M | the element mass matrix |
| U | strain energy of the ANCF cable element |
| E | Young’s modulus |
| A | area of the cross-section |
| I | second moment of inertia of the cross-section |
| the temperature and its gradient at the longitudinal direction | |
| K | curvature of the cable |
| element generalized elastic force | |
| components in the Jacobian matrix of the elastic force | |
| stress | |
| strain | |
| C | damping coefficient in Kelvin–Voigt constitutive model |
| h | time step |
| fractional derivative order | |
| the Grünwald coefficient | |
| truncation number | |
| extra ratio | |
| stress associated with the viscosity | |
| elastic coefficient matrix | |
| generalized viscous force | |
| Ce | Jacobian matrix of the constraint equation |
| Lagrange’s multiplier |
References
- Gu, Y.; Lan, P.; Cui, Y.; Li, K.; Yu, Z. Dynamic interaction between the transmission wire and cross-frame. Mech. Mach. Theory 2020, 155, 104068. [Google Scholar] [CrossRef]
- He, X.; He, W.; Shi, J.; Sun, C. Boundary Vibration Control of Variable Length Crane Systems in Two-Dimensional Space With Output Constraints. IEEE/ASME Trans. Mechatron. 2017, 22, 1952–1962. [Google Scholar] [CrossRef]
- Hu, B.; Zhang, F.; Lu, H.; Zou, H.; Yang, J.; Yu, H. Design and Assist-as-Needed Control of Flexible Elbow Exoskeleton Actuated by Nonlinear Series Elastic Cable Driven Mechanism. Actuators 2021, 10, 290. [Google Scholar] [CrossRef]
- Du, X.; Du, J.; Bao, H.; Chen, X.; Sun, G.; Wu, X. Dynamic Analysis of the Deployment for Mesh Reflector Antennas Driven With Variable Length Cables. J. Comput. Nonlinear Dyn. 2019, 14, 111006. [Google Scholar] [CrossRef]
- Otsuka, K.; Makihara, K.; Sugiyama, H. Recent Advances in the Absolute Nodal Coordinate Formulation: Literature Review From 2012 to 2020. J. Comput. Nonlinear Dyn. 2022, 17, 080803. [Google Scholar] [CrossRef]
- Sugiyama, H.; Mikkola, A.; Shabana, A.A. A Non-Incremental Nonlinear Finite Element Solution for Cable Problems. J. Mech. Des. 2003, 125, 746–756. [Google Scholar] [CrossRef]
- Berzeri, M.; Shabana, A. Development of simple models for the elastic forces in the absolute nodal co-ordinate formulation. J. Sound Vib. 2000, 235, 539–565. [Google Scholar] [CrossRef]
- Wang, Q.; Tian, Q.; Hu, H. Dynamic simulation of frictional contacts of thin beams during large overall motions via absolute nodal coordinate formulation. Nonlinear Dyn. 2014, 77, 1411–1425. [Google Scholar] [CrossRef]
- Wang, Q.; Tian, Q.; Hu, H. Dynamic simulation of frictional multi-zone contacts of thin beams. Nonlinear Dyn. 2015, 83, 1919–1937. [Google Scholar] [CrossRef]
- Li, P.; Liu, C.; Tian, Q.; Hu, H.; Song, Y. Dynamics of a Deployable Mesh Reflector of Satellite Antenna: Parallel Computation and Deployment Simulation1. J. Comput. Nonlinear Dyn. 2016, 11, 061005. [Google Scholar] [CrossRef]
- Li, P.; Liu, C.; Tian, Q.; Hu, H.; Song, Y. Dynamics of a Deployable Mesh Reflector of Satellite Antenna: Form-Finding and Modal Analysis. J. Comput. Nonlinear Dyn. 2016, 11, 041017. [Google Scholar] [CrossRef]
- Lan, P.; Li, K.; Yu, Z. Computer implementation of piecewise cable element based on the absolute nodal coordinate formulation and its application in wire modeling. Acta Mech. 2019, 230, 1145–1158. [Google Scholar] [CrossRef]
- Boumann, R.; Bruckmann, T. Simulation and Model-Based Verification of an Emergency Strategy for Cable Failure in Cable Robots. Actuators 2022, 11, 56. [Google Scholar] [CrossRef]
- Bulín, R.; Hajžman, M. Efficient computational approaches for analysis of thin and flexible multibody structures. Nonlinear Dyn. 2021, 103, 2475–2492. [Google Scholar] [CrossRef]
- Fotland, G.; Haugen, B. Numerical integration algorithms and constraint formulations for an ALE-ANCF cable element. Mech. Mach. Theory 2022, 170, 104659. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, X.; Wu, Z. Experimental Study of Vibration Characteristics of FRP Cables for Long-Span Cable-Stayed Bridges. J. Bridg. Eng. 2015, 20, 04014074. [Google Scholar] [CrossRef]
- Qiu, Y.Z.; Maji, A.K. Experimental and Analytical Investigation of Carbon Fiber Cable Vibration Damping. Exp. Mech. 2014, 54, 1087–1097. [Google Scholar] [CrossRef]
- Zhang, H.; Xie, X.; Zhao, J. Parametric vibration of carbon fiber reinforced plastic cables with damping effects in long-span cable-stayed bridges. J. Vib. Control. 2011, 17, 2117–2130. [Google Scholar] [CrossRef]
- Garcido-Vallejo, G.; Valverde, J.; Dominguez, J. An internal damping model for the absolute nodal coordinate formulation. Nonlinear Dyn. 2005, 42, 347–369. [Google Scholar] [CrossRef]
- Lee, J.W.; Kim, H.W.; Ku, H.C.; Yoo, W.S. Comparison of external damping models in a large deformation problem. J. Sound Vib. 2009, 325, 722–741. [Google Scholar] [CrossRef]
- Kim, H.W.; Yoo, W.S.; Sohn, J.H. Experimental validation of two damping force models for the ANCF. In Proceedings of the Asme International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Las Vegas, NV, USA, 4–7 September 2007; Volume 5, pp. 1025–1032. [Google Scholar]
- Mohamed, A.-N.A.; Shabana, A.A. A nonlinear visco-elastic constitutive model for large rotation finite element formulations. Multibody Syst. Dyn. 2011, 26, 57–79. [Google Scholar] [CrossRef]
- Grossi, E.; Shabana, A.A. Analysis of high-frequency ANCF modes: Navier–Stokes physical damping and implicit numerical integration. Acta Mech. 2019, 230, 2581–2605. [Google Scholar] [CrossRef]
- Yu, H.; Zhao, C.; Zheng, H. A Higher-Order Variable Cross-Section Viscoelastic Beam Element Via ANCF for Kinematic and Dynamic Analyses of Two-Link Flexible Manipulators. Int. J. Appl. Mech. 2017, 9, 1750116. [Google Scholar] [CrossRef]
- Tian, Q.; Zhang, P.; Luo, K. Dynamics of soft mechanical systems actuated by dielectric elastomers. Mech. Syst. Signal Process. 2021, 151, 107392. [Google Scholar] [CrossRef]
- Cortés, F.; Elejabarrieta, M.J. Finite element formulations for transient dynamic analysis in structural systems with viscoelastic treatments containing fractional derivative models. Int. J. Numer. Methods Eng. 2007, 69, 2173–2195. [Google Scholar] [CrossRef]
- Wen, S.; Shen, Y.; Niu, J.; Liu, Y. Dynamical Behavior of Fractional-Order Delayed Feedback Control on the Mathieu Equation by Incremental Harmonic Balance Method. Shock. Vib. 2022, 2022, 7515080. [Google Scholar] [CrossRef]
- Mu, R.; Wen, S.; Shen, Y.; Si, C. Stability Analysis of Fractional-Order Mathieu Equation with Forced Excitation. Fractal Fract. 2022, 6, 633. [Google Scholar] [CrossRef]
- Zheng-You, Z.; Gen-Guo, L.; Chang-Jun, C. A numerical method for fractional integral with applications. Appl. Math. Mech. 2003, 24, 373–384. [Google Scholar] [CrossRef]
- Zhang, Y.; Tian, Q.; Chen, L.; Yang, J. Simulation of a viscoelastic flexible multibody system using absolute nodal coordinate and fractional derivative methods. Multibody Syst. Dyn. 2009, 21, 281–303. [Google Scholar] [CrossRef]
- Lan, P.; Cui, Y.; Yu, Z. A novel absolute nodal coordinate formulation thin plate tire model with fractional derivative viscosity and surface integral-based contact algorithm. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2018, 233, 583–597. [Google Scholar] [CrossRef]
- Wharmby, A.W.; Bagley, R.L. Generalization of a theoretical basis for the application of fractional calculus to viscoelasticity. J. Rheol. 2013, 57, 1429–1440. [Google Scholar] [CrossRef]
- Gerstmayr, J.; Irschik, H. On the correct representation of bending and axial deformation in the absolute nodal coordinate formulation with an elastic line approach. J. Sound Vib. 2008, 318, 461–487. [Google Scholar] [CrossRef]
- Hughes, T.J.R.; Simo, J.C. Computational Inelasticity; Springer Science & Business Media: New York, NY, USA, 1998. [Google Scholar]
- Bagley, R.L.; Torvik, P.J. A Theoretical Basis for the Application of Fractional Calculus to Viscoelasticity. J. Rheol. 1983, 27, 201–210. [Google Scholar] [CrossRef]
- Yakoub, R.Y.; Shabana, A.A. Use of Cholesky Coordinates and the Absolute Nodal Coordinate Formulation in the Computer Simulation of Flexible Multibody Systems. Nonlinear Dyn. 1999, 20, 267–282. [Google Scholar] [CrossRef]
- Hamed, A.M.; Jayakumar, P.; Letherwood, M.D.; Gorsich, D.J.; Recuero, A.M.; Shabana, A.A. Ideal Compliant Joints and Integration of Computer Aided Design and Analysis. In Proceedings of the Asme International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, 2014, Buffalo, NY, USA, 17–20 August 2014; Volume 6. [Google Scholar]
- Arnold, M.; Brüls, O. Convergence of the generalized-α scheme for constrained mechanical systems. Multibody Syst. Dyn. 2007, 18, 185–202. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Length (m) | Radius (mm) | Gravity Acceleration (m/s2) | Density (kg/m3) | Young’s Modulus (GPa) | Poisson Ratio |
|---|---|---|---|---|---|---|
| Value | 2 | 3 | 9.81 | 2320 | 63 | 0.33 |
| Properties | Length (m) | Radius (mm) | Density (kg/m3) | Young’s Modulus (GPa) | Poisson Ratio |
|---|---|---|---|---|---|
| Value | 21 | 13.45 | 2320 | 63 | 0.33 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, Y.; Yu, Z.; Lan, P.; Lu, N. Fractional Derivative Viscosity of ANCF Cable Element. Actuators 2023, 12, 64. https://doi.org/10.3390/act12020064
Gu Y, Yu Z, Lan P, Lu N. Fractional Derivative Viscosity of ANCF Cable Element. Actuators. 2023; 12(2):64. https://doi.org/10.3390/act12020064
Chicago/Turabian StyleGu, Yaqi, Zuqing Yu, Peng Lan, and Nianli Lu. 2023. "Fractional Derivative Viscosity of ANCF Cable Element" Actuators 12, no. 2: 64. https://doi.org/10.3390/act12020064
APA StyleGu, Y., Yu, Z., Lan, P., & Lu, N. (2023). Fractional Derivative Viscosity of ANCF Cable Element. Actuators, 12(2), 64. https://doi.org/10.3390/act12020064