
Research on the Anti-Swing Control Methods of Dual-Arm Wheeled Inspection Robots for High-Voltage Transmission Lines

 ,
,
Abstract
:1. Introduction
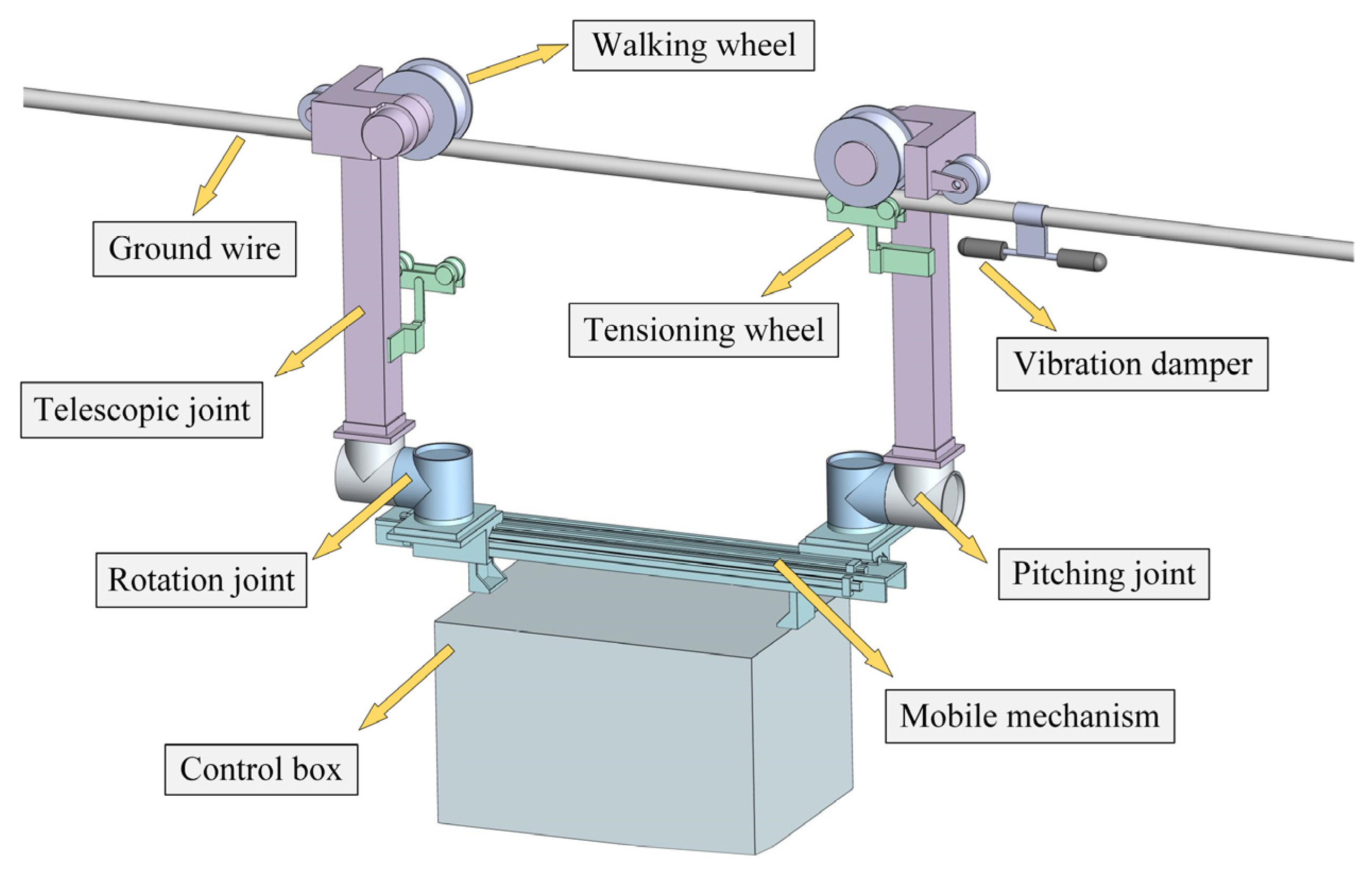
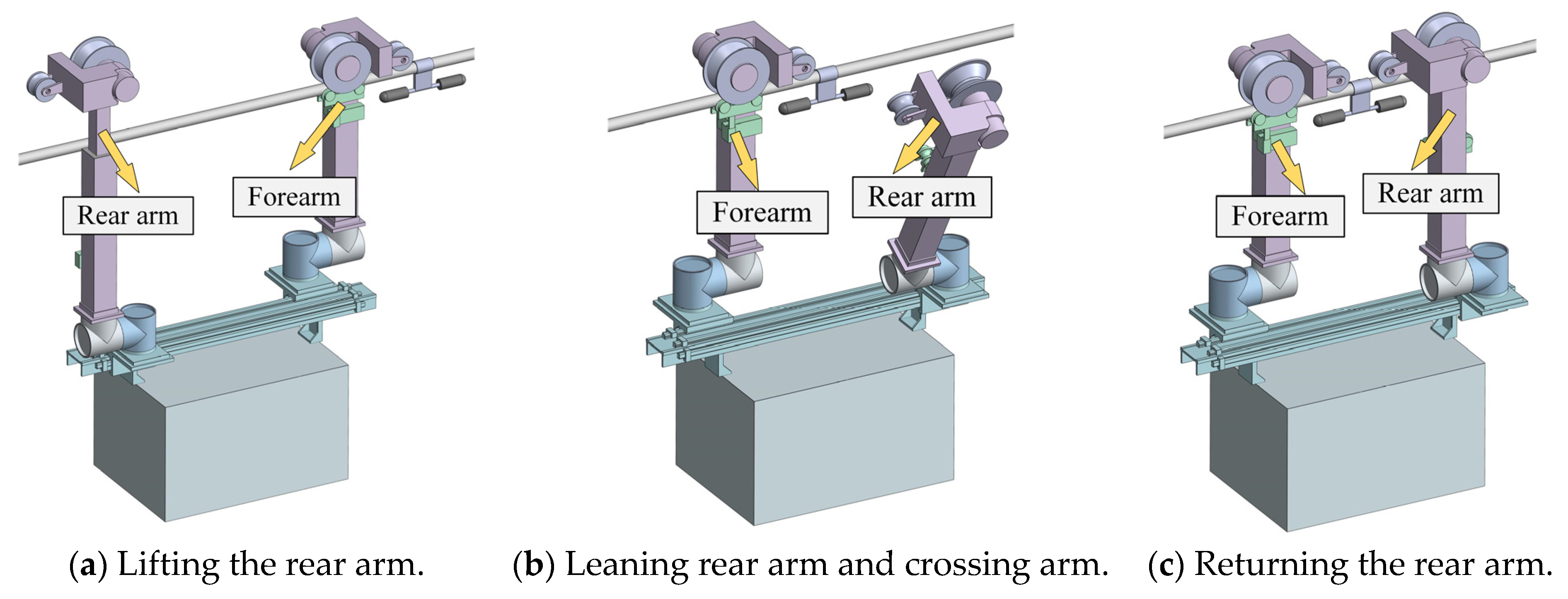
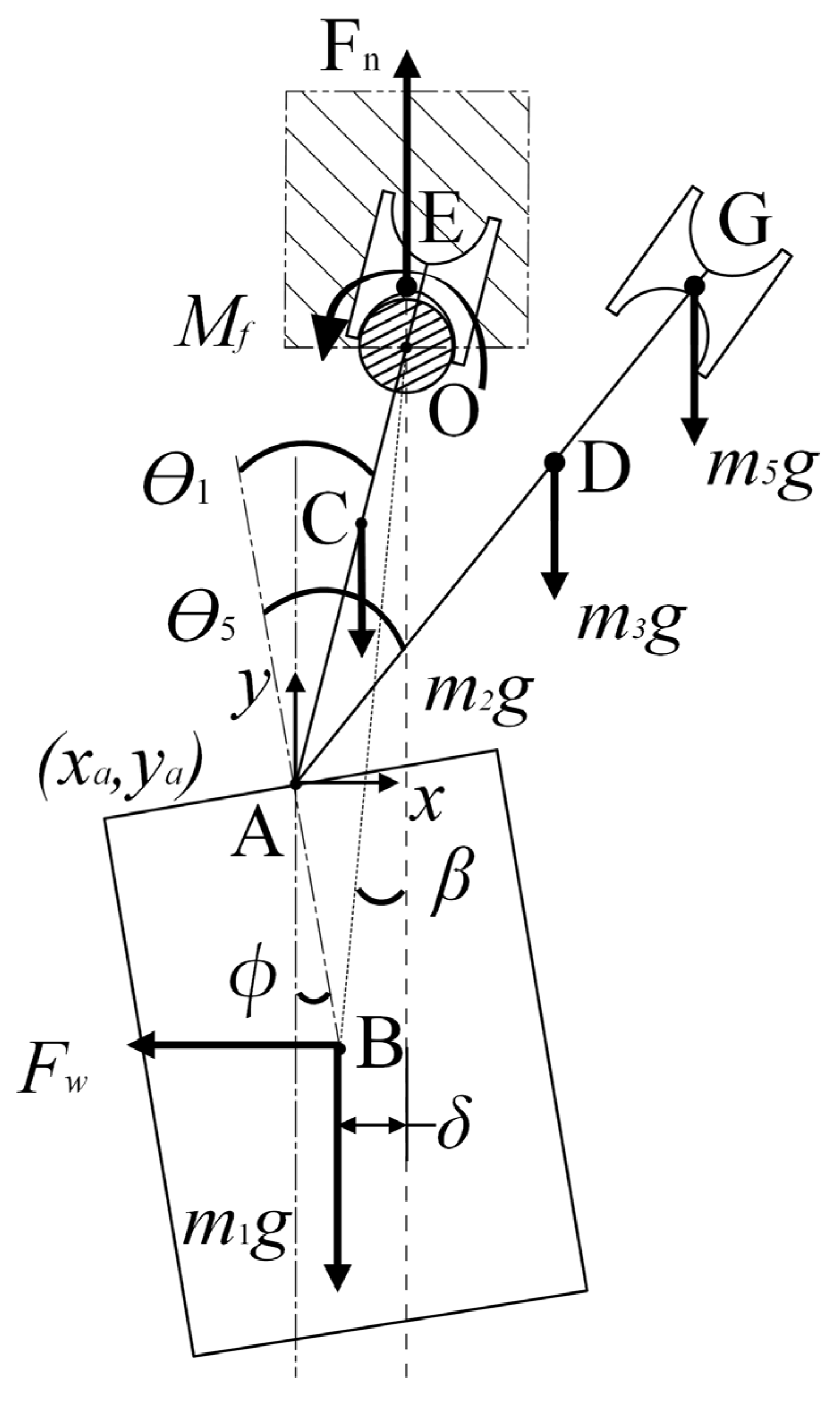
2. Analysis of the Swinging Motion of Inspection Robots around Transmission Lines
3. Inspection Robot Anti-Sway Control Strategy
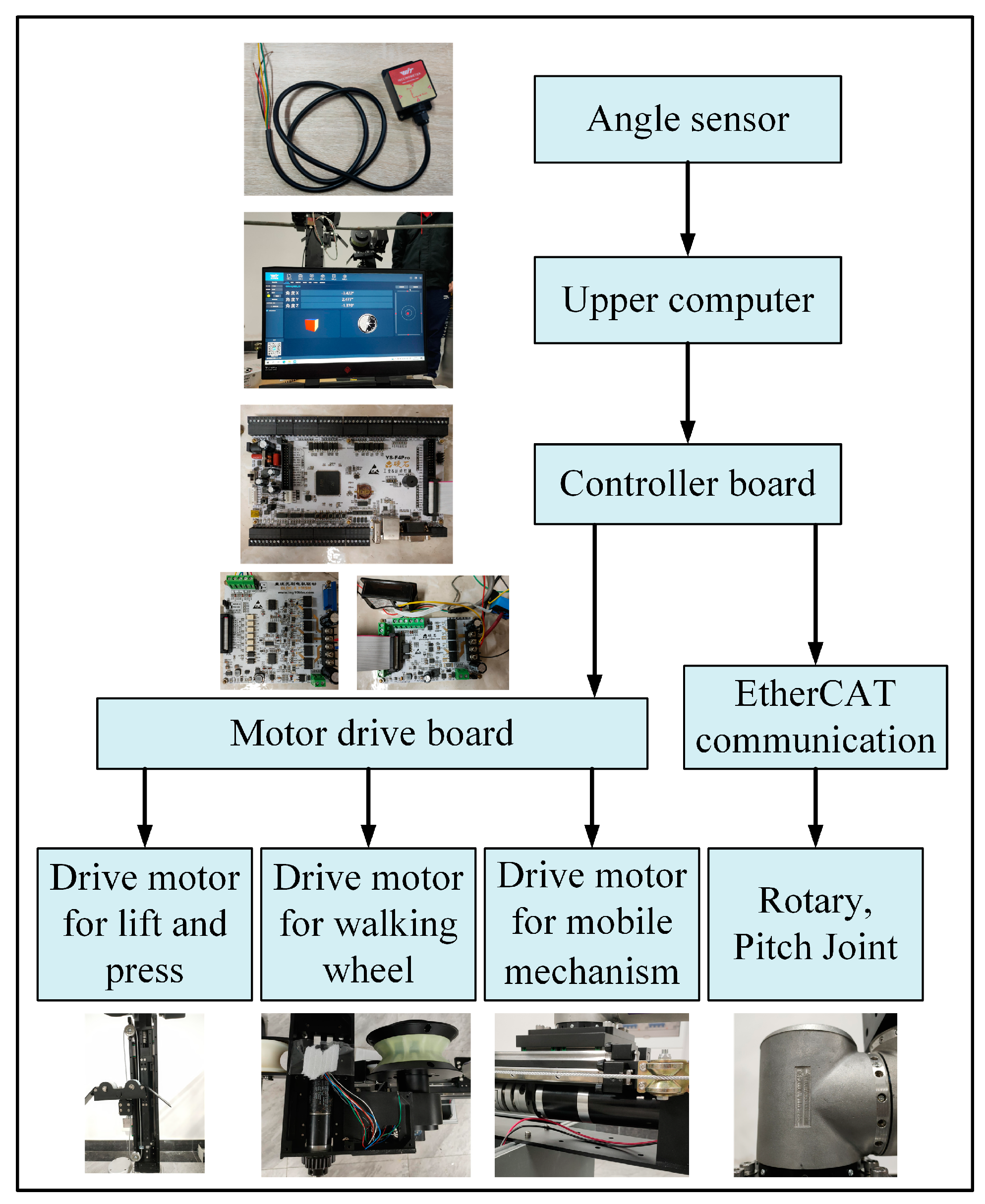
4. Inspection Robot Anti-Swing Control System
4.1. Anti-Swing Fuzzy PID Controller
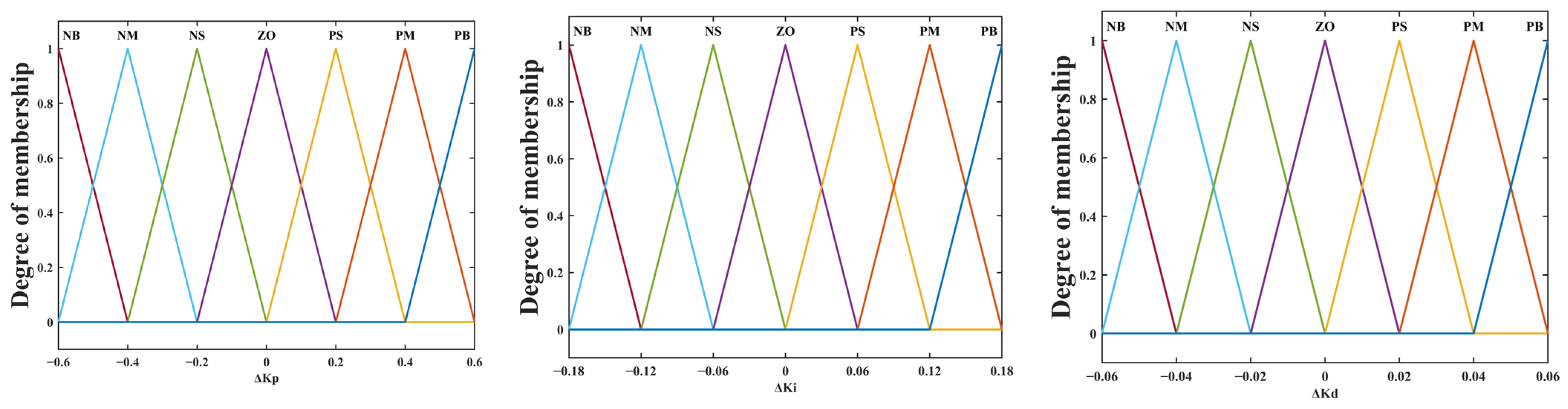
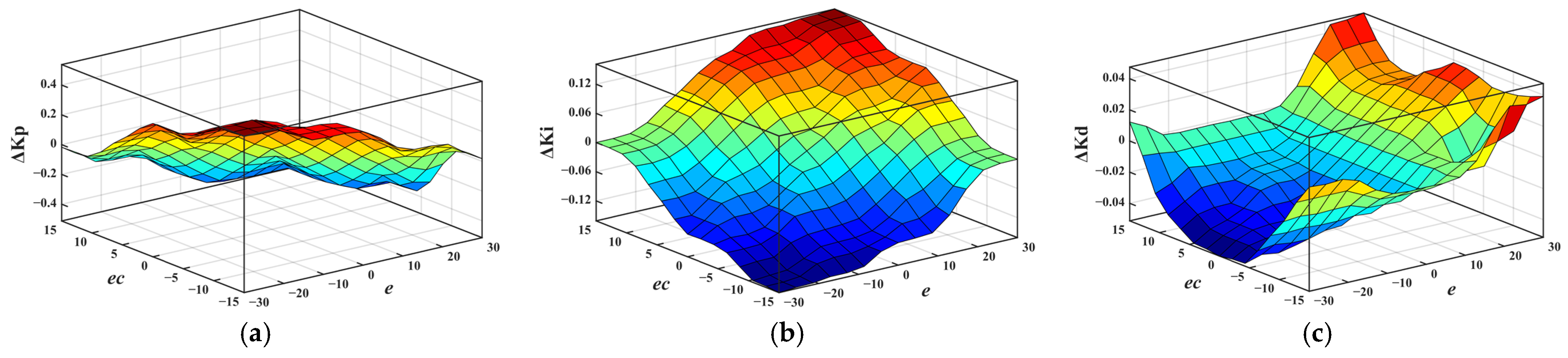
4.2. Design of Anti-Swing Fuzzy PID Controller
5. Simulation and Experimental Analysis of Anti-Sway Control for Inspection Robots Based on Adams/Simulink
5.1. Building of the Adams/Simulink Simulation Platform
- The key proportion method is used to determine the initial value of the gain coefficient KP. The amplitude and period of the system’s oscillation signal are measured to obtain the critical gain, which is then set as the initial value of the gain coefficient, KP.
- The initial integration coefficient, KI, and the differentiation coefficient, KD, are calculated based on the oscillation period. KI is approximately equal to one-quarter of the oscillation period, while KD is approximately equal to one-tenth of the oscillation period.
- The clipping experiment method is used for experimental control. The response curve of the system to a unit step input is observed, and the key response characteristics are measured.
- Based on the experimental data and response characteristics, further adjustment of the PID parameters is performed by gradually adjusting the proportional coefficient, KP, the integral coefficient, KI, and the derivative coefficient, KD, aiming to make the system response as close as possible to the desired result. Finally, the starting values of the fuzzy PID controller parameters KP, KI, and KD are set to 0.3, 0.072, and 0.0005 accordingly.
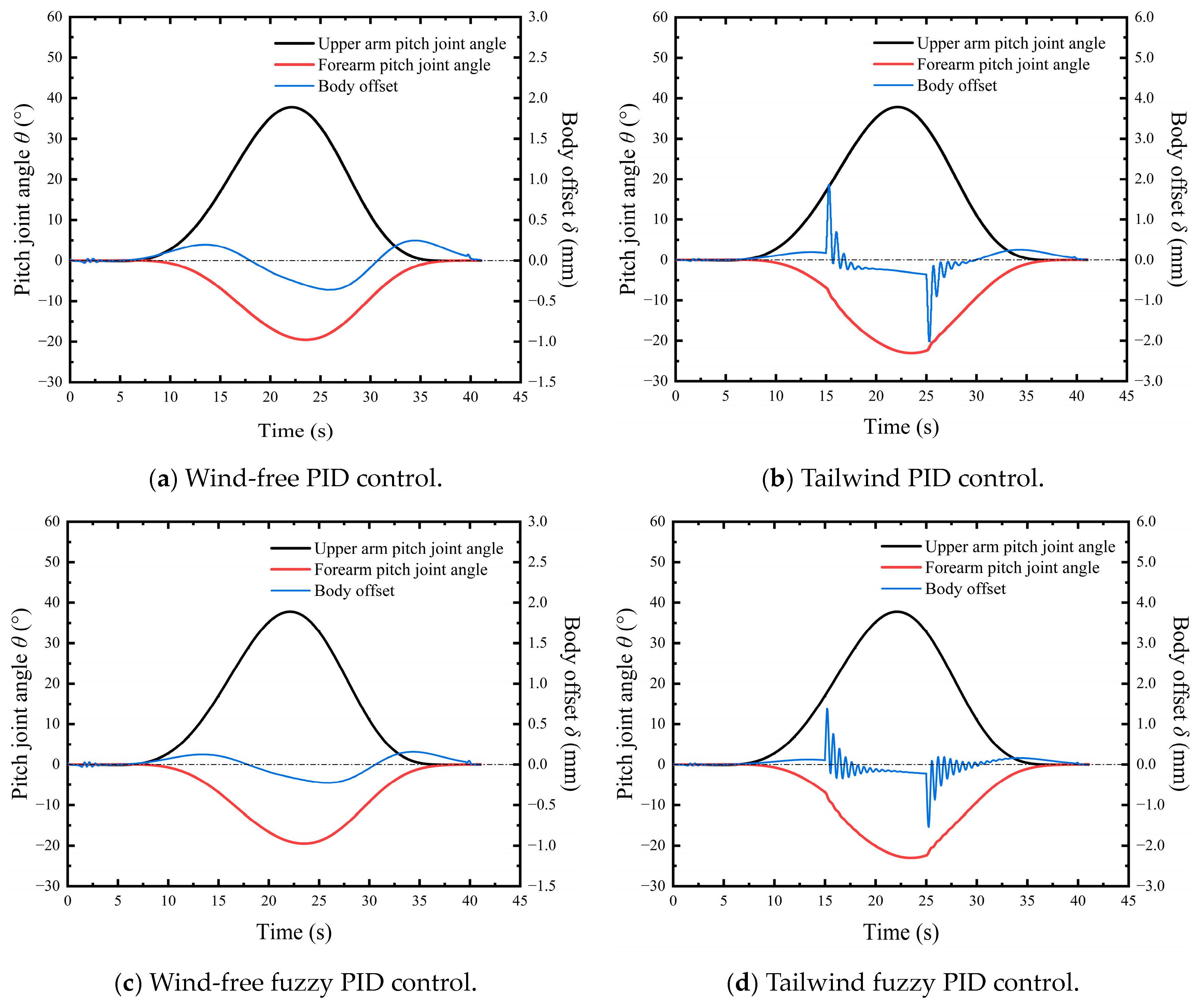
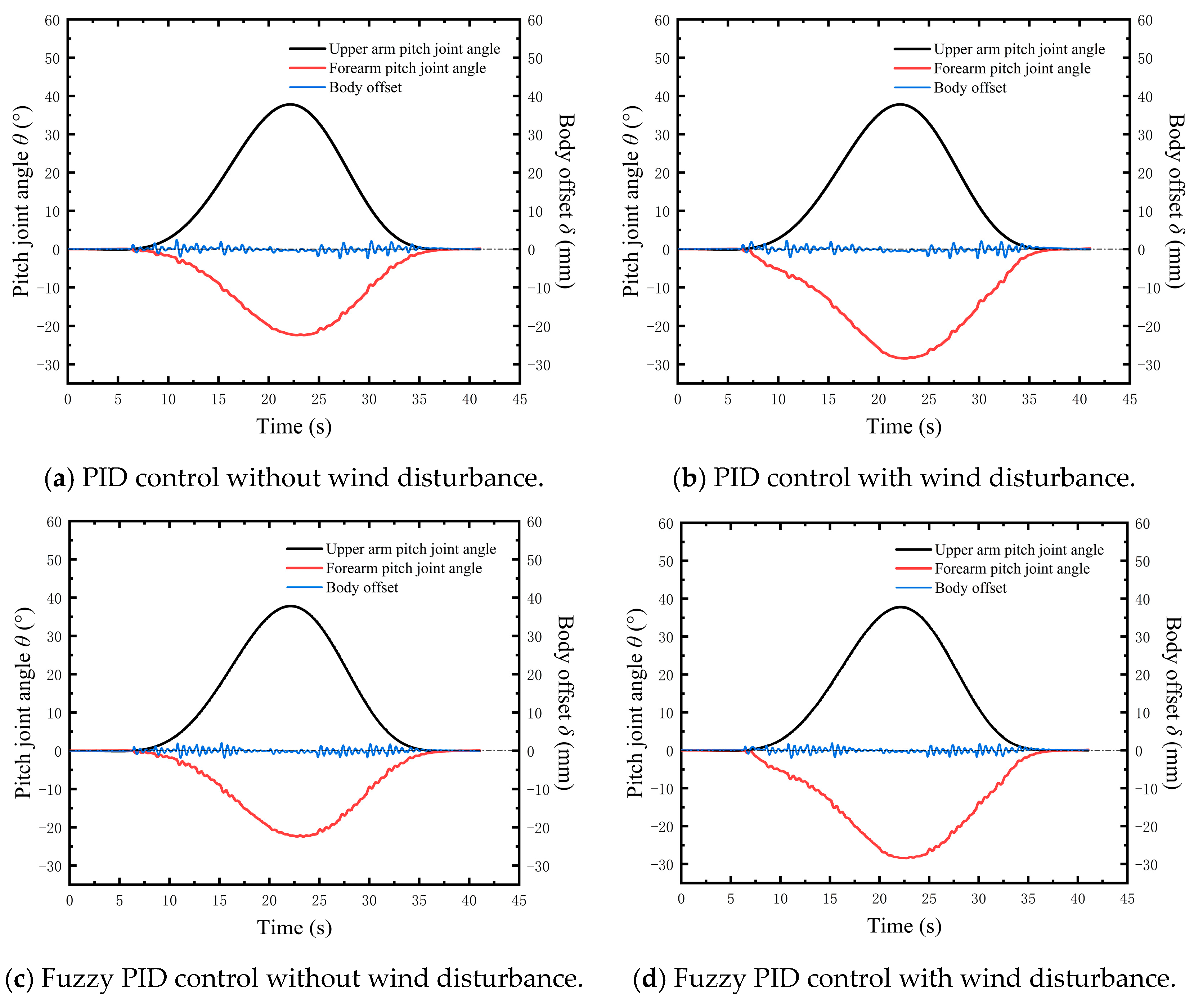
5.2. Simulation Experiments and Analysis
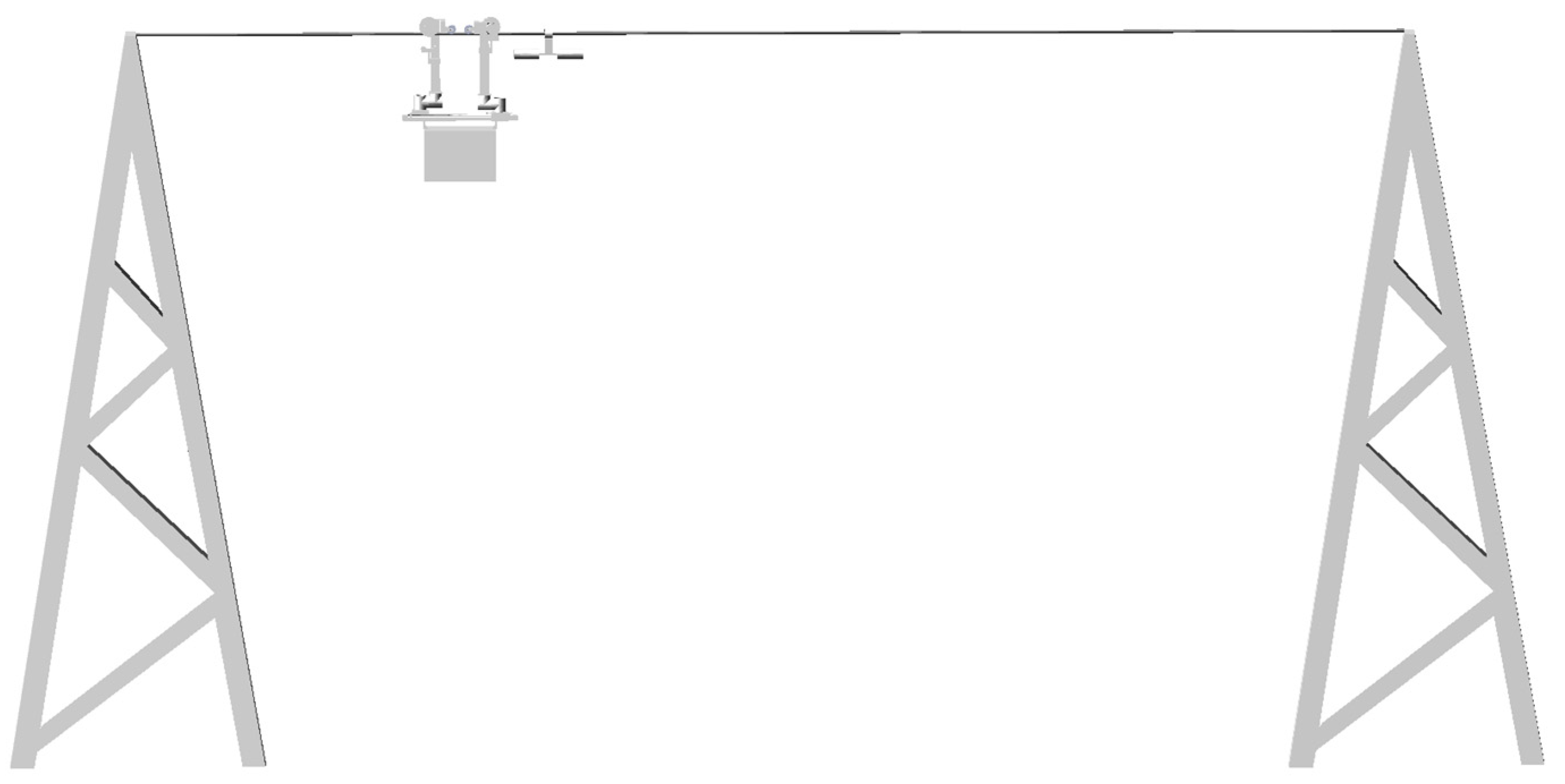
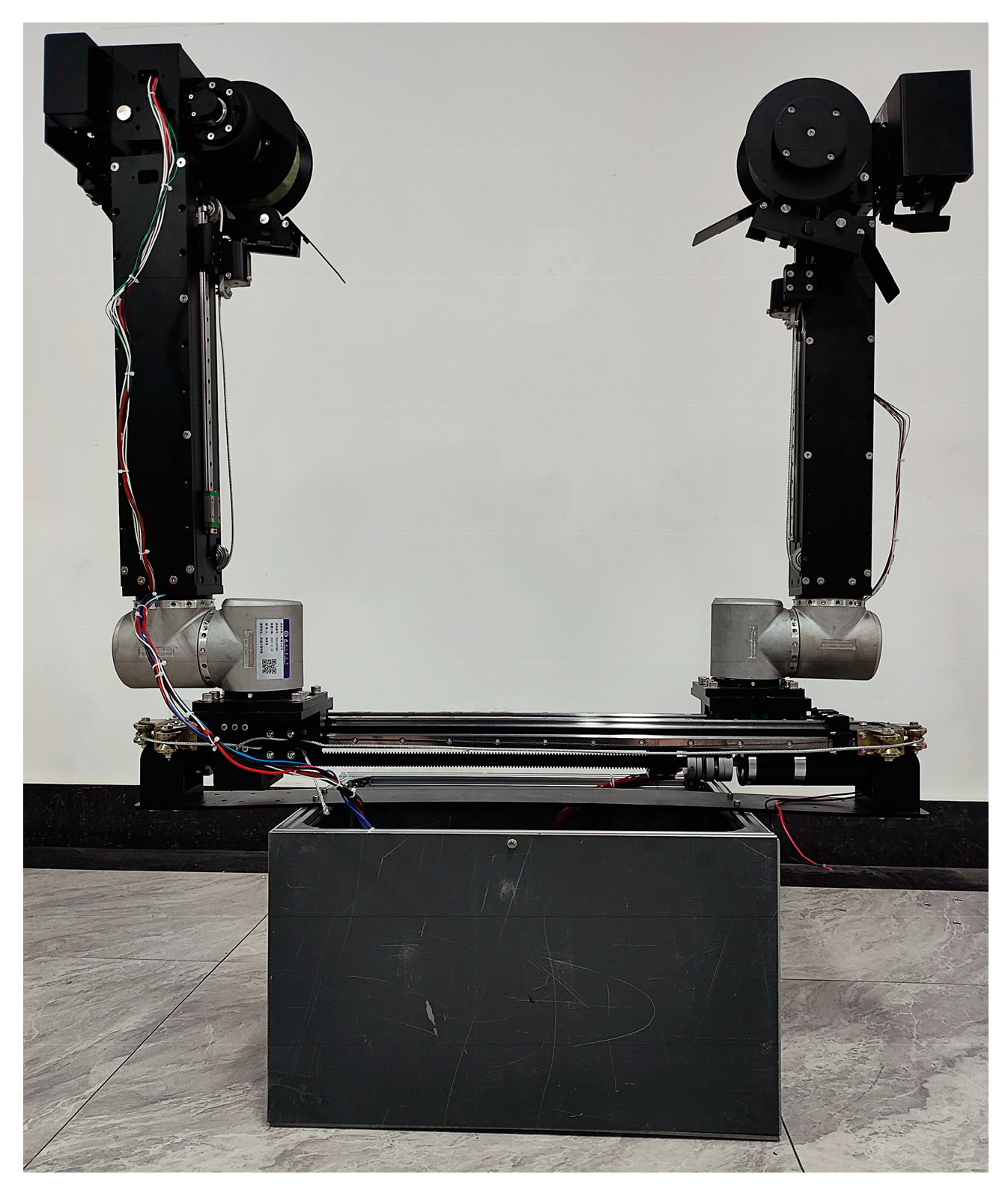
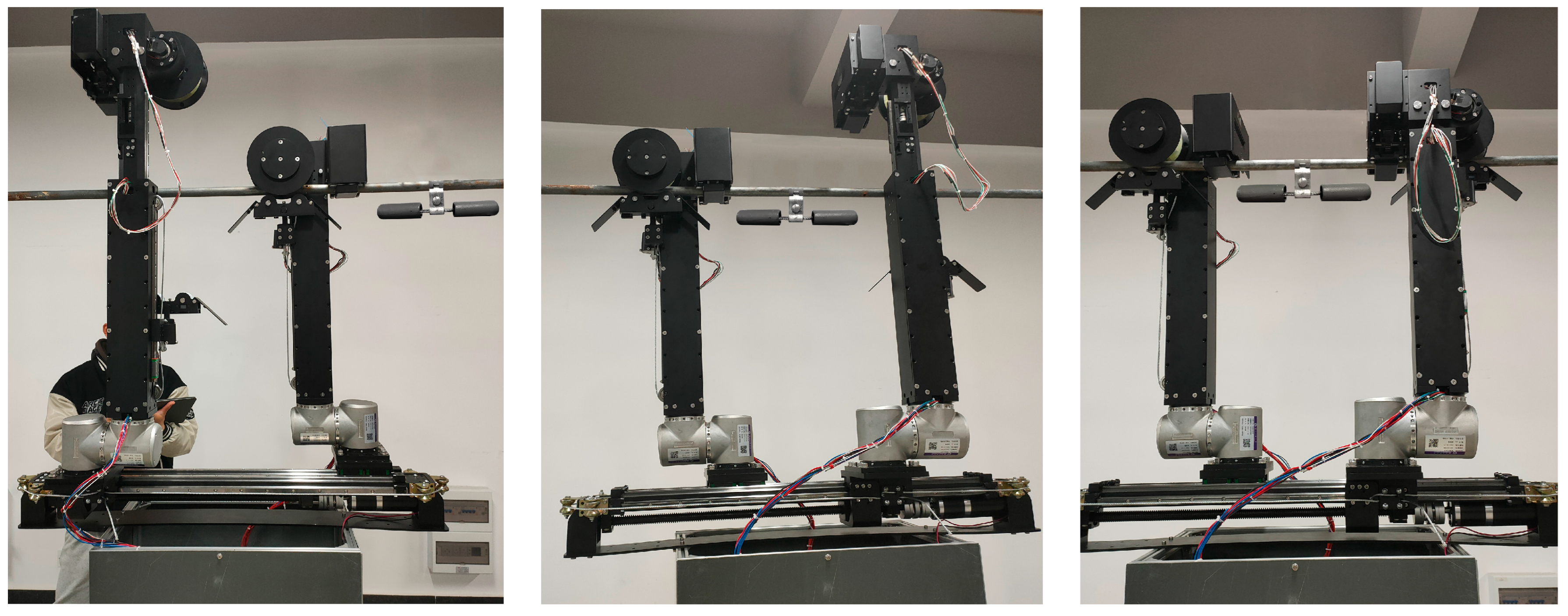
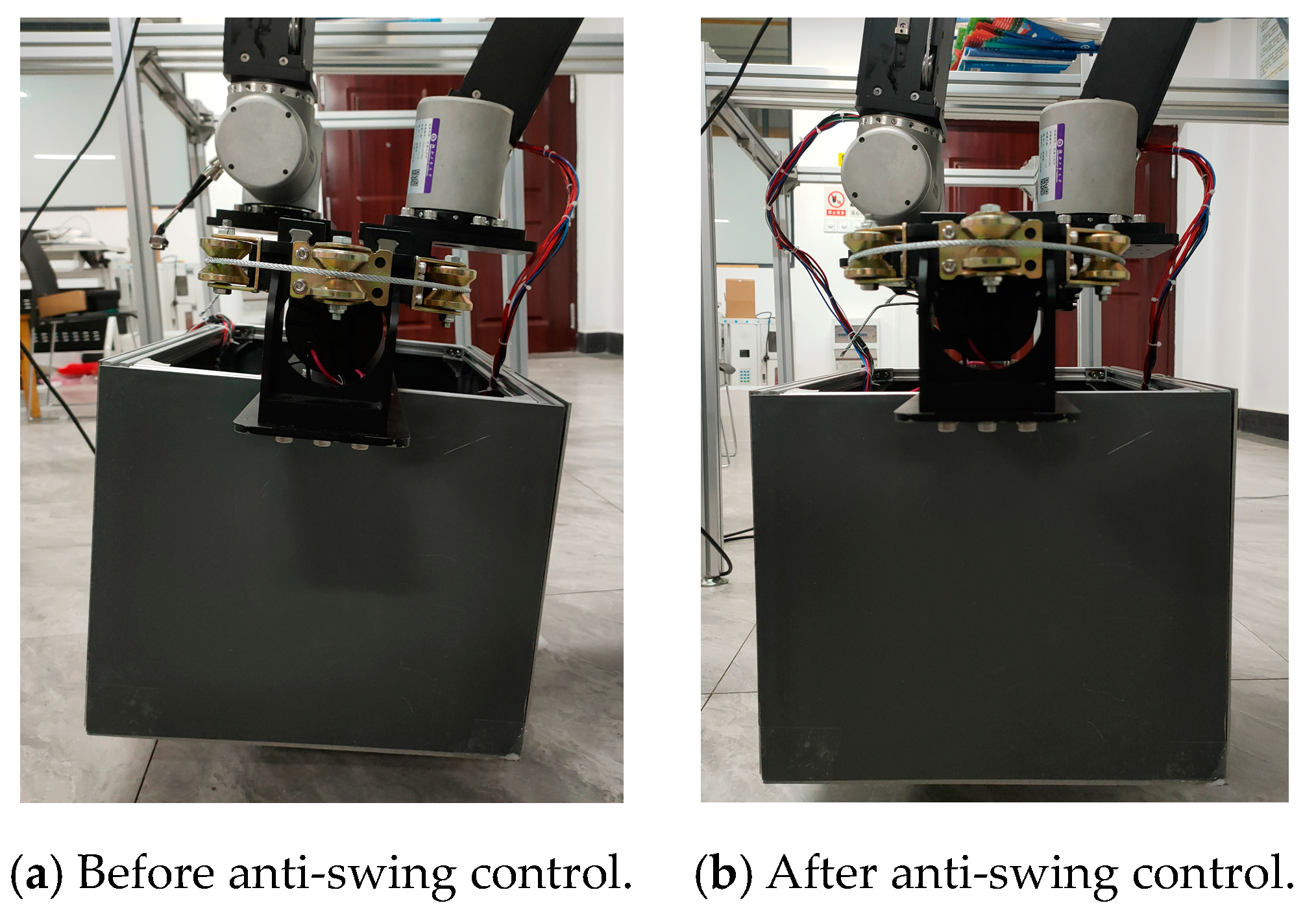
5.3. Prototype Experiment and Analysis
6. Conclusions
- (1)
- This paper focuses on the situation where a robot’s body sways around transmission lines during the obstacle-crossing process, and analyzes the causes of swaying torque and its impact on robot stability the while crossing obstacles.
- (2)
- An anti-swing control strategy is proposed by adjusting the pitch angle of the forearm to reduce offset of the robot’s body towards zero and utilizes the fuzzy PID algorithm to achieve adaptive intelligent control for preventing sway in the robot.
- (3)
- An obstacle-crossing experiment was set up under both windless and wind devices conditions. In both experimental environments, the proposed sway control method kept the robot offset within 3 mm, validating the effectiveness of this approach.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Alhassan, A.B.; Zhang, X.; Shen, H.; Xu, H. Power transmission line inspection robots: A review, trends and challenges for future research. Int. J. Electr. Power Energy Syst. 2020, 118, 105862. [Google Scholar] [CrossRef]
- Gonçalves, S.R.; Carvalho, M.C.J. Review and Latest Trends in Mobile Robots Used on Power Transmission Lines. Int. J. Adv. Robot. Syst. 2013, 10, 108. [Google Scholar] [CrossRef]
- Liu, J.; Wu, G.; Fan, F.; Li, Y. A Robot Hybrid Hierarchical Network for Sensing Environmental Variables of a Smart Grid. Sensors 2020, 20, 5521. [Google Scholar] [CrossRef] [PubMed]
- Ni, J.; Zhan, T. Smart Sensor Network Optimization and Line Defect Identification Based on UAV Transmission Inspection under 5G Technology. J. Sens. 2022, 2022, 6801985. [Google Scholar] [CrossRef]
- Yue, X.; Wang, H.; Feng, Y.; Tian, Y.; Wang, W. Improving Stability of Line Inspection Robot During Crossing Jumper Lines with a Centroid Adjustment Adjusting Mechanism. IEEE Access 2022, 10, 134571–134579. [Google Scholar] [CrossRef]
- Wu, H.; Wu, Y.X.; Meng, L.Z.; Liu, C.A.; Yang, G.T. Hybrid velocity switching and fuzzy logic control scheme for cable tunnel inspection robot. J. Intell. Fuzzy Syst. 2015, 29, 2619–2627. [Google Scholar] [CrossRef]
- Wang, S.; Jin, G.; Li, J.; Ren, Z.; Chen, H.; Sun, Y. Active damping methods to suppress the payload swing by a 3-degree of freedom cable-driven parallel robot. Asian J. Control 2023, 25, 4796–4812. [Google Scholar] [CrossRef]
- Jiang, W.; Wu, G.; Fan, F.; Yan, Y.; Liu, X.; Li, H.; Chen, W. Structure singular value theory based robust motion control of live maintenance robot with reconfigurable terminal function for high voltage transmission line. Int. J. Adv. Robot. Syst. 2018, 15, 17. [Google Scholar] [CrossRef]
- Jiang, W.; Yan, Y.; Li, Q.M.; Zhang, A.; Li, H.J.; Jiang, D. Research on robust stabilization control of high-voltage power maintenance robot under wind load action. Ind. Robot-Int. J. Robot. Res. Appl. 2019, 46, 870–881. [Google Scholar] [CrossRef]
- Lima, E.J.; Bomfim, M.H.S.; Mourao, M.a.D. POLIBOT—POwer Lines Inspection RoBOT. Ind. Robot Int. J. Robot. Res. Appl. 2018, 45, 98–109. [Google Scholar] [CrossRef]
- Xu, B.; Wang, X.; Zhu, Y.; Chen, H. Design of obstacle crossing mechanism of high-voltage transmission line inspection robot. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015. [Google Scholar]
- Gonçalves, R.S.; Carvalho, J.C.M. A mobile robot to be applied in high-voltage power lines. J. Braz. Soc. Mech. Sci. Eng. 2015, 37, 349–359. [Google Scholar] [CrossRef]
- Johan, K.J.; Kjeld, M.E.; Rygaard, M.H. Anti-swing control of a hydraulic loader crane with a hanging load. Mechatronics 2021, 77, 102599. [Google Scholar]
- Yu, W.; Li, X.; Panuncio, F. Stable Neural Pid Anti-Swing Control for An Overhead Crane. Intell. Autom. Soft Comput. 2014, 20, 13895837. [Google Scholar] [CrossRef]
- Chen, H.; Liu, G.; Tian, G.; Zhang, J.; Ji, Z. Safe distance prediction for braking control of bridge cranes considering anti-swing. Int. J. Intell. Syst. 2021, 37, 4845–4863. [Google Scholar] [CrossRef]
- Li, X.; Yu, W. Anti-Swing Control for An Overhead Crane with Fuzzy Compensation. Intell. Autom. Soft Comput. 2012, 18, 1–11. [Google Scholar] [CrossRef]
- Gu, X.; Xu, W. Moving sliding mode controller for overhead cranes suffering from matched and unmatched disturbances. Trans. Inst. Meas. Control 2020, 44, 60–75. [Google Scholar] [CrossRef]
- Wang, J.; Liu, K.; Wang, S.; Chen, H.; Sun, Y.; Niu, A.; Li, H. Dynamic Analysis and Experiment of Underactuated Double-Pendulum Anti-Swing Device for Ship-Mounted Jib Cranes. Pol. Marit. Res. 2022, 29, 145–154. [Google Scholar] [CrossRef]
- Sun, M.; Ji, C.; Luan, T.; Wang, N. LQR Pendulation Reduction Control of Ship-Mounted Crane Based on Improved Grey Wolf Optimization Algorithm. Int. J. Precis. Eng. Manuf. 2023, 24, 395–407. [Google Scholar] [CrossRef]
- Li, G.; Ma, X.; Li, Z.; Li, Y. Time-Polynomial-Based Optimal Trajectory Planning for Double-Pendulum Tower Crane with Full-State Constraints and Obstacle Avoidance. IEEE-ASME Trans. Mechatron. 2023, 28, 919–932. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.E.; Lozano, R.; Castillo, P.; Hernández-González, O.; García-Beltrán, C.D.; Valencia-Palomo, G. Nonlinear Control Strategies for a UAV Carrying a Load with Swing Attenuation. Appl. Math. Model. 2020, 91, 709–722. [Google Scholar] [CrossRef]
- Zhang, D.; Yang, Y.; Han, H.; Hu, Y. Binocular visual pendulum angle detection and anti-swing control of quadrotor suspension system. Trans. Inst. Meas. Control 2023, 45, 723–735. [Google Scholar] [CrossRef]
- Omar, H.M. Hardware-In-the-Loop Simulation of Time-Delayed Anti-Swing Controller for Quadrotor with Suspended Load. Appl. Sci. 2022 12, 1706. [CrossRef]
- Shi, D.; Wu, Z.; Chou, W. Harmonic Extended State Observer Based Anti-Swing Attitude Control for Quadrotor with Slung Load. Electronics 2018, 7, 83. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, D.; Xi, H.; Zhang, G. Anti-swing control and trajectory planning of quadrotor suspended payload system with variable length cable. Asian J. Control 2021, 24, 2424–2436. [Google Scholar] [CrossRef]
- Zhang, J.; Song, G.; Li, Y.; Qiao, G.; Song, A.; Wang, A. A bio-inspired jumping robot: Modeling, simulation, design, and experimental results. Mechatronics 2013, 23, 1123–1140. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| l1 | l3 | l5 | l6 | l7 | r | m1 | m2 | m3 | m5 |
|---|---|---|---|---|---|---|---|---|---|
| 0.17 | 0.33 | 0.68 | 0.61 | 0.29 | 0.01 | 11.5 | 12.3 | 12.2 | 2.5 |
| ec | ||||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| e | NB | PB | PB | PM | PM | PS | ZO | ZO |
| NM | PB | PB | PM | PS | PS | ZO | NS | |
| NS | PM | PM | PM | PS | ZO | NS | NS | |
| ZO | PM | PM | PS | ZO | NS | NM | NM | |
| PS | PS | PS | ZO | NS | NS | NM | NM | |
| PM | PS | ZO | NS | NM | NM | NM | NB | |
| PB | ZO | ZO | NM | NM | NM | NB | NB | |
| ec | ||||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| e | NB | NB | NB | NM | NM | NS | ZO | ZO |
| NM | NB | NB | NM | NS | NS | ZO | ZO | |
| NS | NB | NM | NS | NS | ZO | PS | PS | |
| ZO | NM | NM | NS | ZO | PS | PM | PM | |
| PS | NM | NS | ZO | ZO | PS | PM | PB | |
| PM | ZO | ZO | PS | PS | PM | PB | PB | |
| PB | ZO | ZO | PS | PM | PM | PB | PB | |
| ec | ||||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| e | NB | PB | PB | PM | PM | PS | ZO | ZO |
| NM | PB | PB | PM | PS | PS | ZO | NS | |
| NS | PM | PM | PM | PS | ZO | NS | NS | |
| ZO | PM | PM | PS | ZO | NS | NM | NM | |
| PS | PS | PS | ZO | NS | NS | NM | NM | |
| PM | PS | ZO | NS | NM | NM | NM | NB | |
| PB | ZO | ZO | NM | NM | NM | NB | NB | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Yan, K.; Zhang, Z.; Duan, H.; Liu, X.; Li, Y.; Zhang, D.; Yan, Y.; Fan, S. Research on the Anti-Swing Control Methods of Dual-Arm Wheeled Inspection Robots for High-Voltage Transmission Lines. Actuators 2023, 12, 472. https://doi.org/10.3390/act12120472
Yang Z, Yan K, Zhang Z, Duan H, Liu X, Li Y, Zhang D, Yan Y, Fan S. Research on the Anti-Swing Control Methods of Dual-Arm Wheeled Inspection Robots for High-Voltage Transmission Lines. Actuators. 2023; 12(12):472. https://doi.org/10.3390/act12120472
Chicago/Turabian StyleYang, Zhiyong, Kai Yan, Ziyu Zhang, Hua Duan, Xing Liu, Yi Li, Daode Zhang, Yu Yan, and Shaosheng Fan. 2023. "Research on the Anti-Swing Control Methods of Dual-Arm Wheeled Inspection Robots for High-Voltage Transmission Lines" Actuators 12, no. 12: 472. https://doi.org/10.3390/act12120472
APA StyleYang, Z., Yan, K., Zhang, Z., Duan, H., Liu, X., Li, Y., Zhang, D., Yan, Y., & Fan, S. (2023). Research on the Anti-Swing Control Methods of Dual-Arm Wheeled Inspection Robots for High-Voltage Transmission Lines. Actuators, 12(12), 472. https://doi.org/10.3390/act12120472