1. Introduction
Considering recent fossil fuel depletion and energy regulations, the importance of energy conservation is becoming increasingly prominent. As a result, motor development has also been increasingly focused on high efficiency. High-performance rare-earth permanent magnets, which can enhance the performance of motors in terms of torque, output density, and efficiency, have emerged. This has led to active research in the field of permanent magnet synchronous motors [
1]. However, due to rising material costs caused by inflation, an increase in the price of motors has become necessary. As a result, research efforts are actively underway worldwide to produce cost-competitive products by various companies. Because single-phase Drive ICs are more cost-competitive compared to three-phase Drive ICs, many motor applications in household appliances frequently utilize single-phase motors [
2]. In pursuit of cost competitiveness, in addition to traditional radial flux motors, claw-pole motors, which employ ring-type permanent magnets, are being researched due to their simple and economical structure.
Motors that offer cost competitiveness often emphasize the importance of streamlining the manufacturing process and reducing material costs. Claw-pole motors, for instance, do not require laminated core plates, and their straightforward structure simplifies the manufacturing process, making them suitable for cost savings [
3,
4]. Claw-pole motors are fundamentally shaped like claws, and their classification is based on the position of the “claw,” leading to a basic categorization into rotor-type and stator-type, reflecting the attached name according to their core structure. In the case of the rotor-type, it features a structure where the rotor contains coils or permanent magnets that are surrounded by the claws, resembling the shape of the claw enveloping them. On the other hand, the stator-type replaces the traditional motor’s shoes and teeth with the claws. In other words, the claw surrounds the stator coils in this structure. In this context, the advantage is that the coils surrounded by the claw can utilize a ring-type winding configuration based on the shape characteristics of the claw. Specifically, the claw-pole in the rotor is advantageous for making multipolar configurations depending on the number of claws coupled to it, using the slinky lamination method to increase the utilization of electrical steel sheets when manufacturing the stator. However, due to the centrifugal force in the rotor, there is a maintenance drawback, making it necessary to use permanent magnets in the rotor. The brush and commutator structure has a cost disadvantage in maintenance. The materials used in the fixed-type claw-pole motor widely used in alternators for automobiles can be broadly classified into fixed and rotating parts. The stator consists of windings made of copper and a core made of SPCC, while the rotor comprises permanent magnets and a rotor core made of SPCC. Examining the core, a single-phase claw-pole motor does not use laminated steel sheets. This means that when manufacturing the core, there is no need for interlocking and welding for laminating, reducing the costs incurred in the lamination process. Additionally, simplifying the winding structure of the claw-pole motor, which can be seen as concentrating the teeth into one, simplifies the winding process, reducing winding process costs. The fixed-type claw-pole motor is more economical and has a structurally advantageous design for compact lightweight applications, making it suitable for various applications such as optical drives, hard disks, motors for computer peripherals, and drive motors. However, due to the structural characteristics in manufacturing the claw and stator, laminated steel sheets cannot be used, making it highly susceptible to eddy current losses. Recently, there has been active research in applying Soft Magnetic Composite (SMC) materials and 3D printing technology to motors to reduce eddy current losses. However, utilizing 3D printing technology can increase the manufacturing cost of claw-pole, and if claw-pole is produced based on SMC material, it has a significant drawback in terms of stiffness vulnerability. Therefore, a proposed approach is to mitigate eddy current losses by shaping a claw-pole motor without stacking SPCC steel plates, preserving the robust mechanical structure, which is an inherent advantage of claw-pole motors. Therefore, this paper proposes a shape for reducing eddy current losses in a single-phase fixed-type claw-pole motor, targeting its application for cooling the fan motor in microwave ovens. This paper is composed of three main parts. In
Section 1, the paper provides an explanation of the operating principles and manufacturing methods of the stator-type claw-pole motor.
Section 2 describes the specifications of existing motors used in microwave ovens and conventional ovens and discusses the characteristics of these motors when converted to stator-type claw-pole motors.
Section 3 presents a formula for eddy current losses and proposes a shape for reducing eddy current losses through the analysis of the magnetic path and saturation in claw-pole motors. Furthermore, claw-pole motors have a shape that is not constant in the axial direction, unlike typical motors, and the magnetic paths generated in the rotor and stator of claw-pole motors occur in both radial and axial directions. Therefore, the validity of the proposed model was verified using 3D finite element analysis (FEA) [
5].
2. Characteristics of Single-Phase Stator Claw-Pole Motor and Driving Principle
Figure 1 provides an explanation of the shape of the stator-type claw-pole motor. In
Figure 1a, you can see the structure that includes the rotor, and in
Figure 1b, the shape of the stator core is visible. As evident from the figure above, the rotor exhibits a shape similar to that of a surface permanent magnet synchronous motor (SPMSM) with permanent magnets attached to the back yoke. The stator core consists of components resembling claws and a stator back yoke, creating a slotted structure. Within these slots, there is a ring-type winding, and the number of stacked stator cores determines the phase count, resembling a configuration where cans are stacked, hence the term “can stack motor”. In this paper, as it is based on single-phase motors, there is only one stator, as shown in
Figure 1b.
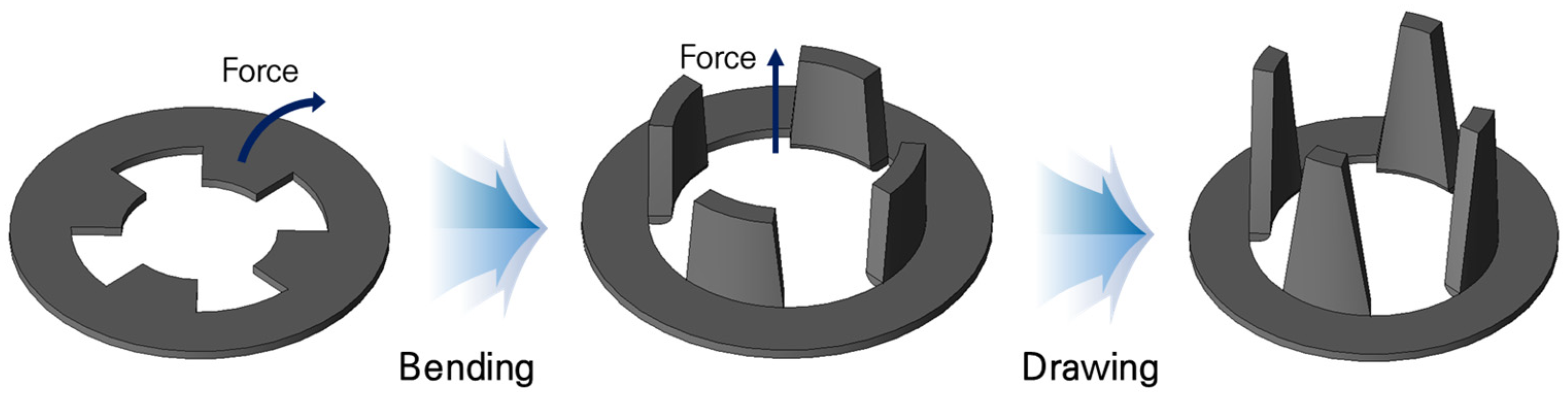
The structure of the stator is notably different from the typical core-type motor, and because of these characteristics, laminated core plates cannot be used. In the manufacturing of claw-pole motor stators, the deep drawing method is employed. Deep drawing is a process that essentially involves pressing a punch onto the sheet metal surface to shape it according to the mold’s form. The process of deep drawing is categorized as “deep” if the depths of pressing reach a diameter of the part which is to be formed [
6,
7]. Due to this manufacturing process, laminated core plates cannot be used for the stator core. Instead, a material with excellent machinability and formability is required, which is why steel plate cold commercial (SPCC), a type of cold-rolled steel product, is chosen as the material for the stator core.
Figure 2 illustrates the stator manufacturing process of a claw-pole motor using the deep drawing method. A part of the stator core is bent and extended using a punch to create the claw shape. However, SPCC is a material that is susceptible to magnetic saturation due to its lower permeability and saturation level compared to electrical steel sheets. In addition, for the non-laminated steel plates, performance varies significantly depending on the thickness. To interpret eddy current losses more accurately, the analysis is conducted based on the fill factor, and to ensure convergence, the analysis is carried out for a minimum of two cycles. The electromagnetic field analysis software used in this paper is Jmag version 22.
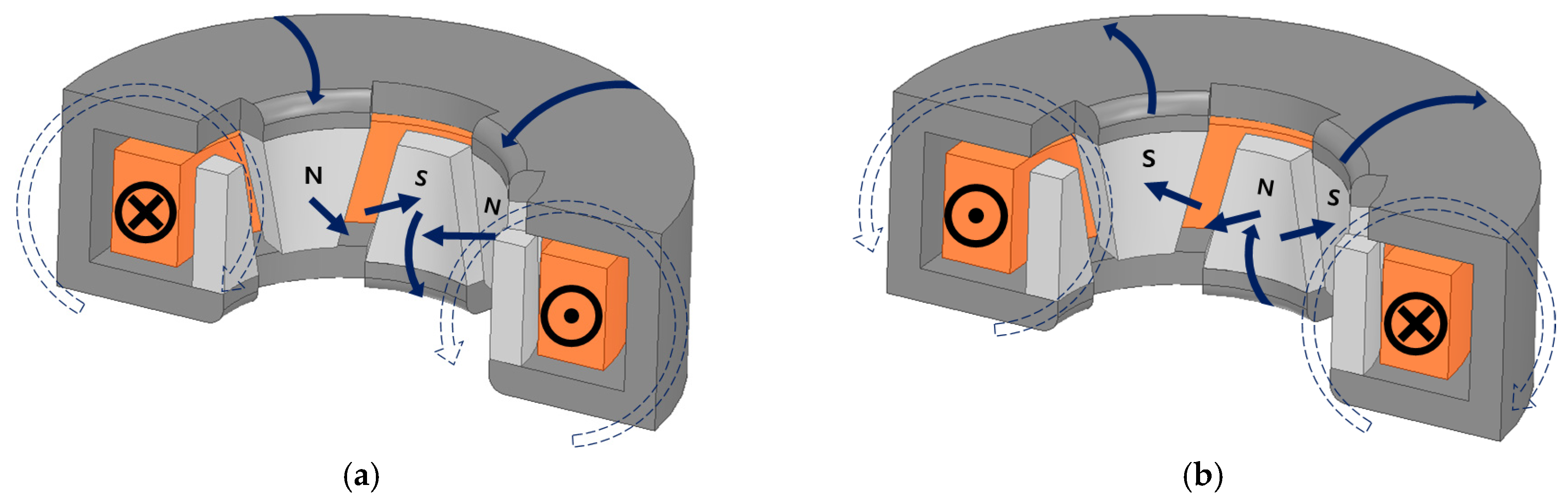
In the case of a single-phase motor, it differs from a three-phase motor by employing a commutator system. While the three-phase motor rotates in accordance with the rotor system during operation, the single-phase motor follows the commutator system. However, the single-phase motor encounters starting issues due to the commutator system. Overcoming the initial counter-torque and rotating in line with the commutator system pose challenges to the starting characteristics compared to the three-phase motor. Even if it successfully generates a torque greater than the counter-torque and starts, the reverse magnetic flux from the commutator system causes the single-phase motor to initially rotate in one direction and then vibrate without ultimately achieving stable operation. To compensate for these starting characteristics, a special structure is required. In this paper, an asymmetric air gap structure is proposed to mitigate the dead point by introducing a phase difference between the cogging torque and the torque. When there is only one pole of permanent magnets on the claw, the magnetic path is as follows: permanent magnet (N)—claw (N)—stator yoke—claw (S)—permanent magnet (S). The magnetic flux entering from the permanent magnet’s south pole exits through the internal path to the permanent magnet’s north pole. When the rotor has moved by half a pitch, and there are permanent magnets with opposite poles on the claw, the magnetic path follows this route: permanent magnet (N)—claw (N)—permanent magnet (S) [
8,
9,
10,
11,
12] (
Figure 3). In this case, it is evident that the magnetic path has a shorter route compared to when one pole of a permanent magnet faces the claw. As a result, due to the ever-changing magnetic path based on the rotor’s position in the claw-pole motor, fluctuations in magnetic stored energy occur. These differences in magnetic stored energy drive the operation of the claw-pole motor.
3. Basic Design of Single-Phase Stator-Type Claw-Pole Motor
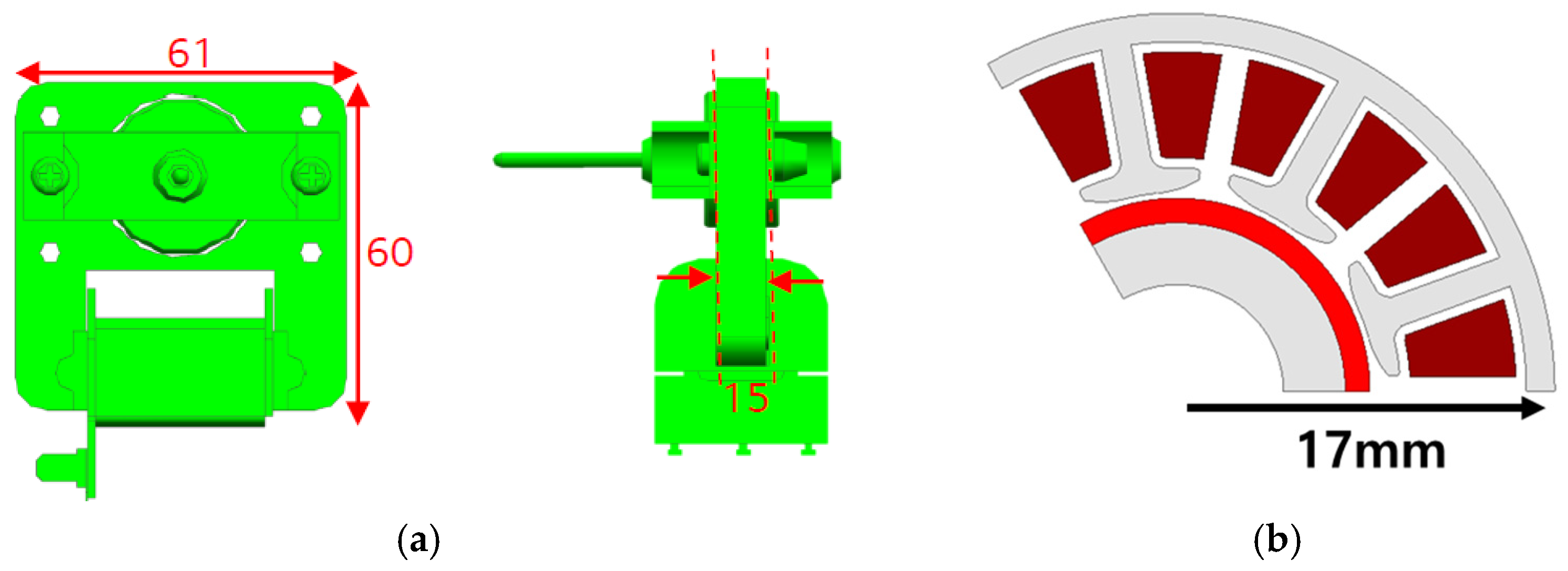
To undertake the basic design of a single-phase claw-pole motor, it is essential to examine the shape and specifications of an existing cooling fan motor, as shown in
Figure 4.
Figure 4a represents the mass-produced model of the existing cooling fan motor, while
Figure 4b is the three-phase model developed for cost savings. In the case of conventional induction motors, the difficulty in speed control led to the use of 11 different motors, resulting in disadvantages for maintenance and upkeep (
Table 1). As a solution, research has been conducted to transition to permanent magnet (PM) motors. Therefore, for size constraints, the stacking is 15 mm, the same as the existing inductor, the outer diameter is 39 mm for a motor with a circular shape considering the shaft, and the target power is 5.5 W, the same as the existing cooling fan motor. In this case, the target motor is a three-phase SPMSM (surface permanent magnet synchronous motor) that uses the same permanent magnet as a reference, so we will change it to a single-phase claw-pole motor.
To select the number of poles for the single-phase claw-pole motor, a comparative analysis is carried out for unloaded eddy current losses and back electromotive force (EMF) from 4 poles to 10 poles. For the single-phase claw-pole motor, considering a 1:1 ratio between the poles of permanent magnets and claws, the comparative analysis starts from four poles. It is important to consider that motors with more than 12 poles at the current size face manufacturing challenges, so a comparison of back electromotive force (EMF) is carried out for up to 10 poles under unloaded conditions. In this case, the back electromotive force (EMF) increases up to 10 poles, which is advantageous for performance. However, it is essential to note that the eddy current losses also increase. Based on the results in
Figure 5 and
Figure 6, models with eight poles or fewer are selected to balance performance and eddy current losses.
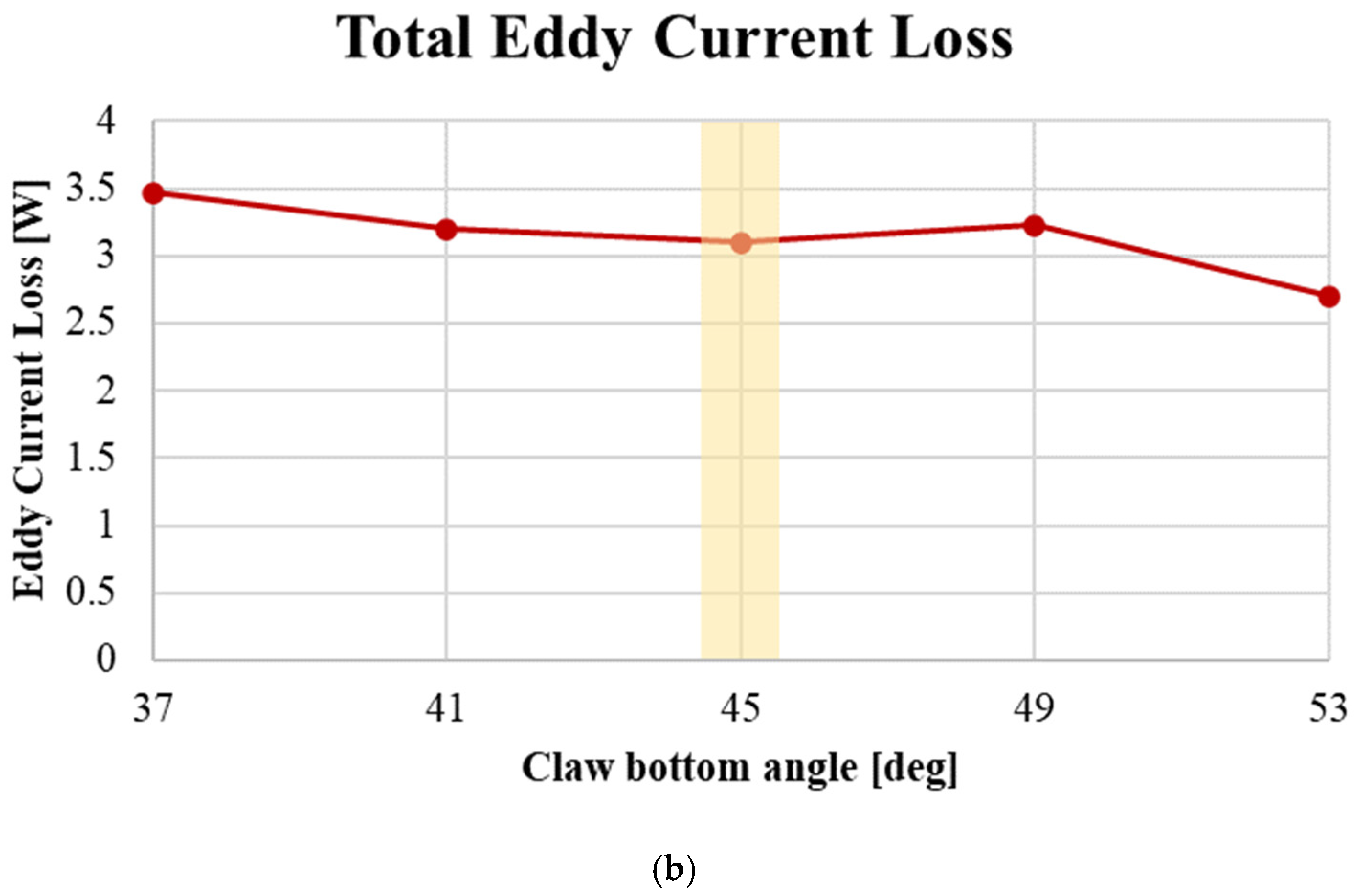
To derive the optimal size of the claw, the no-load performance is analyzed by decreasing and increasing the pole pitch angle by 4 [deg] from 45 [deg], which is the maximum angle of one pole of a permanent magnet on an eight-pole basis. The claw top angle is defined as half of the claw bottom angle; the claw top and claw bottom are shown in
Figure 7, and the no-load electromotive force and eddy current losses are shown in
Figure 8.
Figure 8 shows that at a pole pitch angle of 45 [deg], the no-load eddy current loss has a sharp change in slope, and the eddy current loss has an inflection point. Based on this, when analyzing based on 45 [deg], the no-load electromotive force decreases by 2 [%], and eddy current loss increases by 3.2 [%] for 41 [deg], which is a decrease of 4 [deg]. For 49 [deg], an increase of 4 [deg], the no-load electromotive force increases by 1.5 [%] and eddy current losses increase by 4.19 [%], so the pole pitch angle of all single-phase claw-pole motor models is selected as the claw bottom angle. In addition, in the case of a motor with a laminated steel plate, the loss characteristics are very different depending on the structure and thickness of the core. Therefore, it should be considered as an eddy current loss calculated based on the conductivity, and the analysis time is very long, so the eddy current loss and air gap asymmetry structure are not considered when performing the tendency analysis. The basic design of a single-phase claw-pole motor within the same size limit as the conventional motor is shown in
Figure 9, and the performance is shown in
Table 2.
When the motor is the same size as the existing model, it does not meet the target torque of 15 [mN·m]. Therefore, a design is needed to increase the total magnetic loading and total electric loading for torque enhancement. The equation related to total magnetic loading is the same as Equation (1), and the equation related to total electric loading is expressed in Equation (2).
In Equation (1),
represents the pole pair number, and
denotes the average gap flux per pole, and in Equation (2),
represents the phase current, while
represents the total number of conductors in the stator. As can be seen from the equations, increasing the electrical and magnetic loadings requires an increase in size. Therefore, an analysis of performance characteristics in relation to the increase in stack length and outer diameter is conducted. The shape characteristics are analyzed by adjusting the stack length and outer diameter based on the same volume and magnet usage to design a single-phase claw-pole motor that meets the target performance (
Table 3).
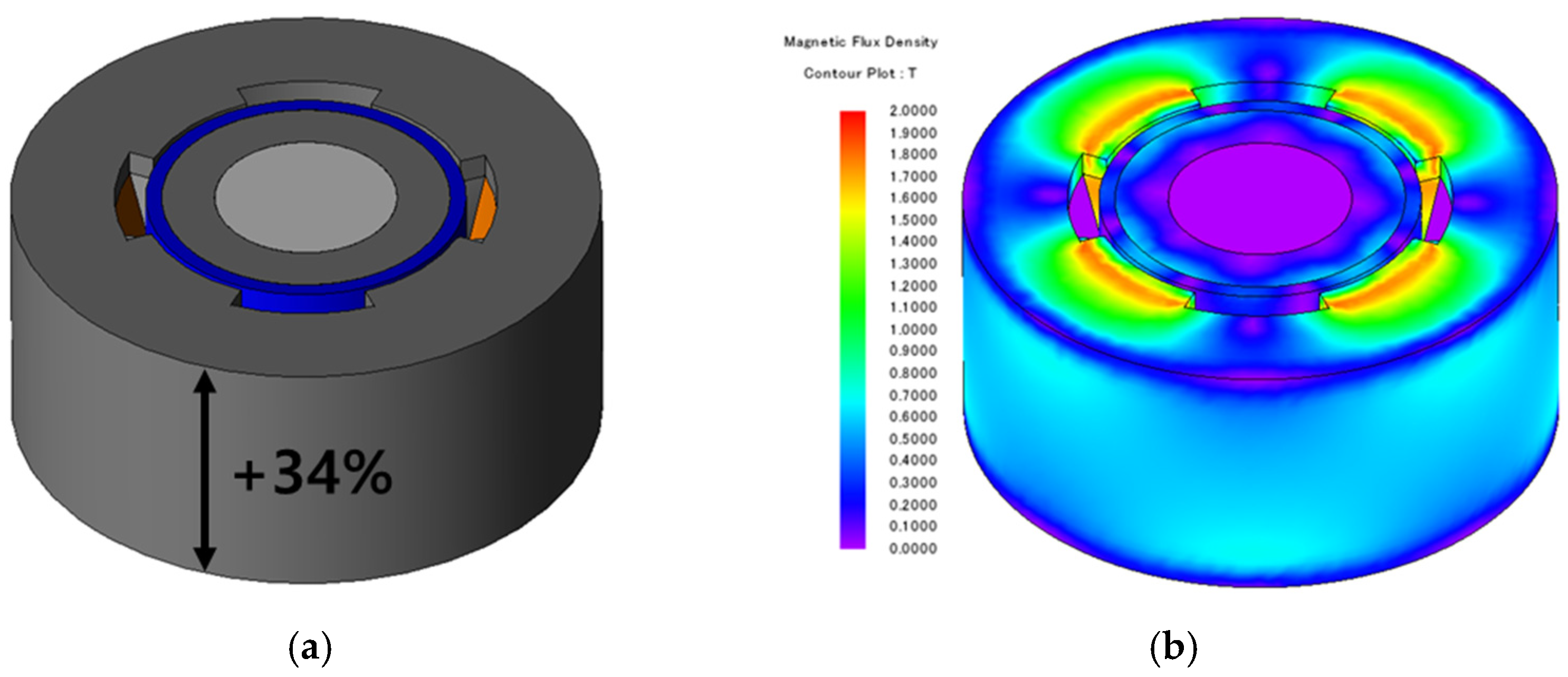
Figure 10 shows the shapes and magnetic saturation densities of each model, with the extent of size increase expressed as a percentage.
Figure 8a increased the stack length by 2.3 mm, and
Figure 8b increased the outer diameter by 3.32 mm compared to the base model.
Increasing the stack length and outer diameter resulted in an increase in the slot cross-sectional area, and, with a constant slot fill factor, the number of turns also increased. While the model with increased stack length had 15 more turns compared to the model with increased outer diameter, the increased stack length also led to an increase in the effective cross-sectional area for generating torque, resulting in an overall torque increase. Therefore, the design will proceed based on the model with increased stack length. In the case of the single-phase claw-pole motor, there are performance losses due to eddy current losses and uneven air gap, so the analysis will be carried out with performance margins taken into account considering the maximum stack length within the same volume and then analyzing the eddy current losses.
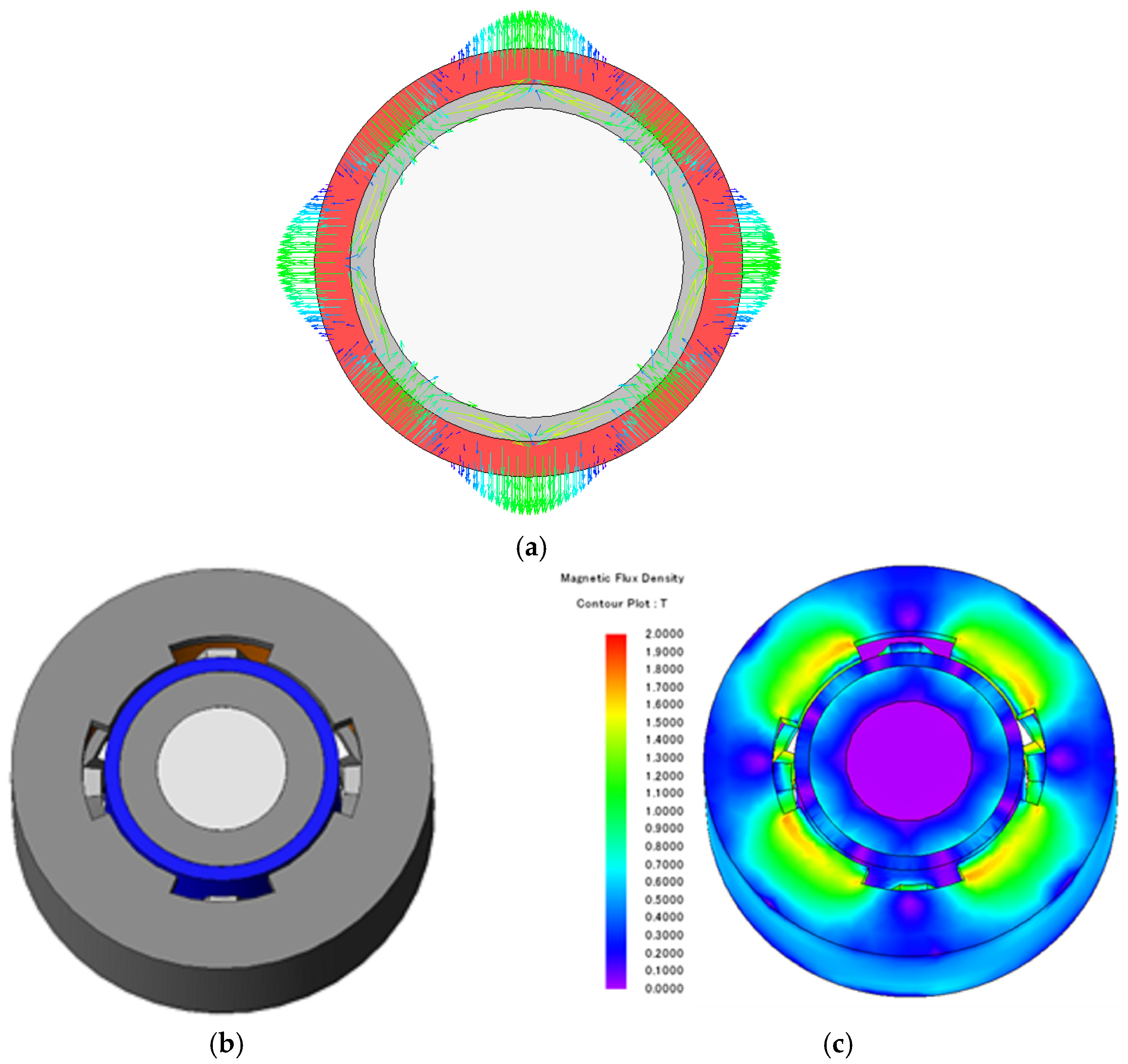
Figure 11 shows the shape and magnetic flux density distribution of the single-phase claw-pole motor with the same stack length as the conventional induction motor.
Table 4 displays the performance of the model with the maximum stack length.
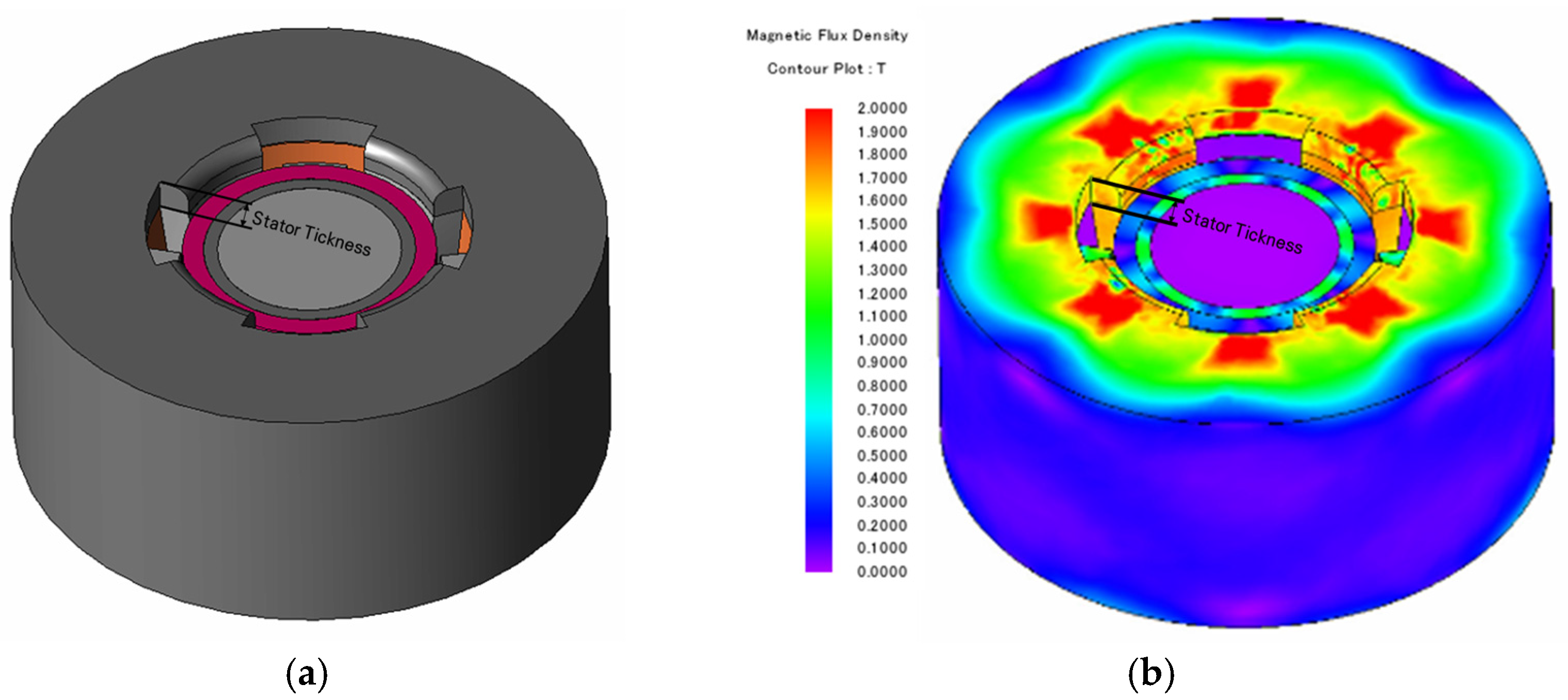
The model with the maximum stack length does not meet the target performance when considering the eddy current loss. To achieve the desired performance, it is necessary to design for an increase in the field strength. The sum of the magnetic flux from permanent magnets and the demagnetizing effect caused by the stator current generates the eddy current. To reduce the no-load saturation, electrical loading is maximized to consider the eddy current loss. To maximize the electrical loading, the magnet thickness and the rotor back yoke thickness are minimized. To improve the magnetic flux density, the stator back yoke thickness is increased from the existing 1.5 mm to 1.8 mm. Performance comparisons and analyses are conducted for models with up to eight poles (
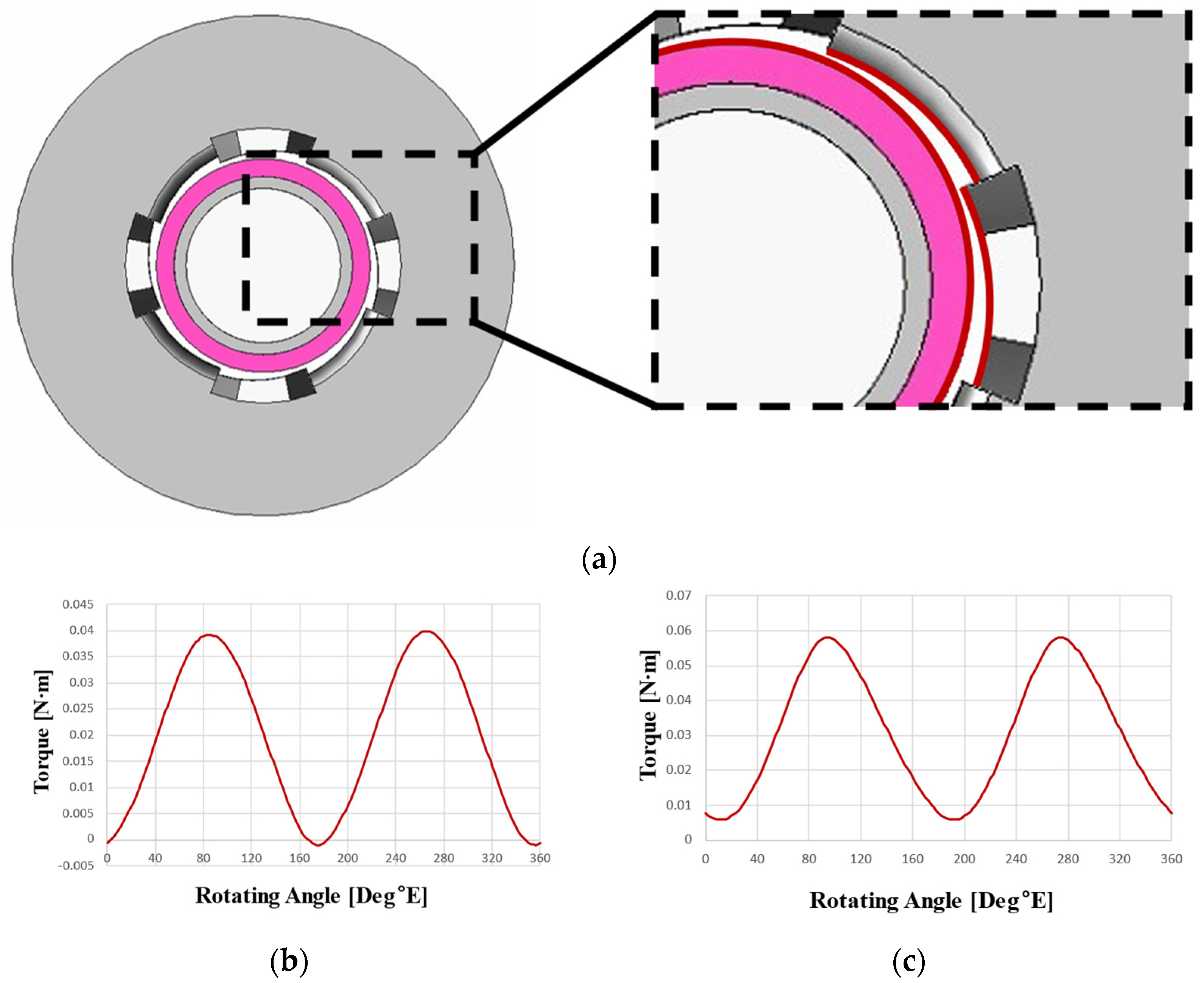
Figure 12). At this point, the wider section of the claw is set to be equal to the pole pitch, while the narrower section is configured to be half of the pole pitch.
In
Table 5, comparing the four poles with the least loss and the eight poles with the most loss, it can be seen that the eddy current loss increases by 64.3%. However, in the single-phase claw-pole motor of this paper, the claw occupies half of the pole pitch below and the upper part as much as the pole pitch, so the smaller the number of poles, the smaller the length of the physical claw. As the number of poles increases, the torque also increases, but once the number of poles exceeds a certain point, the extent of leakage between the poles increases, leading to a decrease in torque. Therefore, based on the table, we can observe that the torque increases by 72.4% when comparing the four-pole configuration. Considering the target performance and performance reduction due to the asymmetric structure of the air gap, the eight-pole model appears to be the most suitable choice. Therefore, we select the eight-pole model to reduce eddy current losses.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}