1. Introduction
Fluid power transfers energy using pressurized fluid, typically hydraulic oil or air, to control and flexibly transmit high power levels with excellent power-to-weight ratios [
1]. Two parallel fields exist under fluid power: pneumatics (air) and hydraulics (liquids). The medium used in hydraulic fluid power systems (hydraulic oil) serves as a self-lubricant and aids in heat transfer and contamination control due to its oxidation stability, wear resistance, low freezing point, high boiling point, and relatively large bulk modulus [
2]. Besides the capability of achieving high power densities, fluid power systems are characterized by their controllability, versatility, ease of operation, flexibility in power transmission, and the durability and dependability of the utilized fluid power actuators [
3]. They also offer various configuration options, allowing for standardized and cost-efficient equipment designs. Given all these advantages, fluid power has been occupying a well-defined research area and scholarly activities, serving prevalent industries like agriculture, transportation, construction, aerospace, manufacturing, and many other industrial applications requiring high actuation power and fast energy capture [
4].
Although essential and prevalent, many existing fluid power systems exhibit low overall efficiencies [
5]. A study published by the United States Department of Energy reveals that fluid power systems, typically fluid power drivetrains, have an average efficiency not exceeding 22% [
6]. The insufficiency in the performance of such fluid power systems is highly associated with the performance of the employed hydraulic units and the systems’ configuration. The variable displacement pump is a fundamental hydraulic unit utilized in many mobile fluid power systems. It is the heart of such systems, serving as a tool for converting rotational mechanical energy into hydraulic energy for power transmission and force actuation [
7]. Its efficiency considerably affects the efficiency and performance of the overall fluid power system [
8]. Conventional variable displacement pumps (currently existing hydraulic pumps) are efficient when operating at full displacements; however, they typically exhibit low efficiencies when running at low displacements [
9]. The deficiency in the performance of variable displacement hydraulic pumps highly affects the system’s overall performance due to leakage across the valves, valve throttling, and other mechanical losses [
10]. Given this research gap and its efficiency consequences on many industrial applications, researchers have been incorporating digital hydraulic technology into fluid power systems due to its considerable potential to improve their overall performance and efficiency.
Advancing technologies have enabled new opportunities for enhancing conventional hydraulic components. Digital hydraulics is a technology that integrates on/off technology in hydraulic systems to improve the systems’ performance, overall productivity, and energy savings [
11]. Given its potential advantages over conventional hydraulic technology, it is becoming more significant in fluid power research. Digital hydraulics offers a high potential for addressing fluid power challenges through multiple inventive solutions [
7]. Digital technologies use discrete actuation to control valves as opposed to analog systems. At a system level, digital hydraulics replace conventional proportional valves with more reliable and robust on/off valves by actively applying discrete modulated digital signals. When applied to digital pump technologies, the utilized on/off valves enable various operating strategies, such as partial and sequential flow diverting and limiting strategies. Such operating strategies offer a method of variable displacement using positive sealing valves in conventional pumps, reinforcing the system’s performance and accounting for higher precision, robustness, and reliability [
12]. Besides running the system in multiple operating modes, this technology allows for new architectures, like sensorless incremental actuation and accurate resolution control, which are unattainable using continuous hydraulic technology [
7,
13]. Given these advantages, digital hydraulics is a promising technology in fluid power research to supplement conventional fluid power systems and enable system- and component-level improvements.
The significance of this research is the evaluation of a mechanically actuated valving system implemented on radial piston pumps, which has not previously been evaluated. A two-quadrant pump and a four-quadrant pump motor are simulated to assess potential designs for future implementation and testing of the systems. The importance of evaluating both a four-quadrant pump/motor and a two-quadrant pump motor is to understand the benefits and disadvantages of each design and the potential for future prototyping and commercialization. These designs could provide the opportunity to create a versatile pump/motor that could benefit various applications needing high power density while maintaining high efficiencies across its displacement curve. The development of the two-quadrant pump serves as a simpler and more cost-effective design that could fulfill the needs of specific applications without the requirement of four-quadrant operation.
In contrast, developing the four-quadrant digital design could enable energy recovery through regenerative lowering or braking on applications such as hydraulic wind turbines, excavators, and wheel loaders. Both designs would be particularly beneficial in helping address future industry concerns related to fuel efficiency, emissions, regulations, and electrification. Developing mechanically actuated valve systems promotes a novel and innovative approach to achieving four-quadrant operation in digital pumps/motors. It expands the literature and investigation of mechanically actuated digital pumps/motors.
2. Background
Stephen Salter is recognized for conceptualizing digital pump/motors, rooting the concept of digital pump/motors in the conversion of wave energy [
14]. Later, Salter proposed a hydrostatic solution with secondary control for wind energy. In the following years, this technology was developed for hydrostatic wind turbine transmission by Win Rampen and his research team; the development has been detailed in research [
15,
16,
17,
18]. In 2006, the onset of Artemis Intelligent Power was formed from Salter’s research team that originated from the University of Edinburgh. Later acquired by Mitsubishi Heavy Industries, Artemis Intelligent Power Ltd. (AIP) (Loanhead, UK) developed one of the largest and most efficient offshore hydraulic wind turbines of its time [
19].
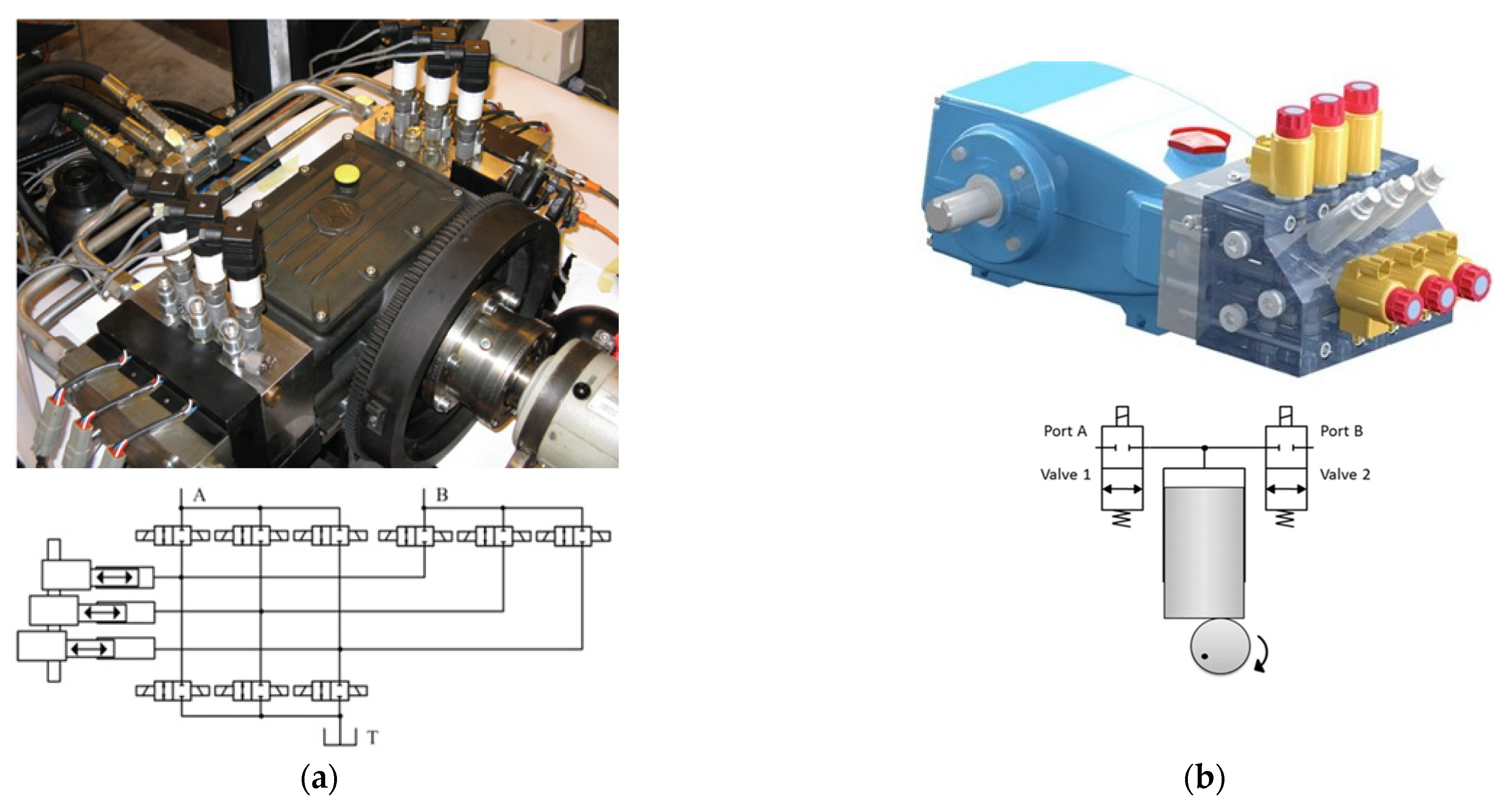
The Artemis technology has continued to be used for developing digital pump technologies in various applications to generate controllable hydraulic power with high efficiencies [
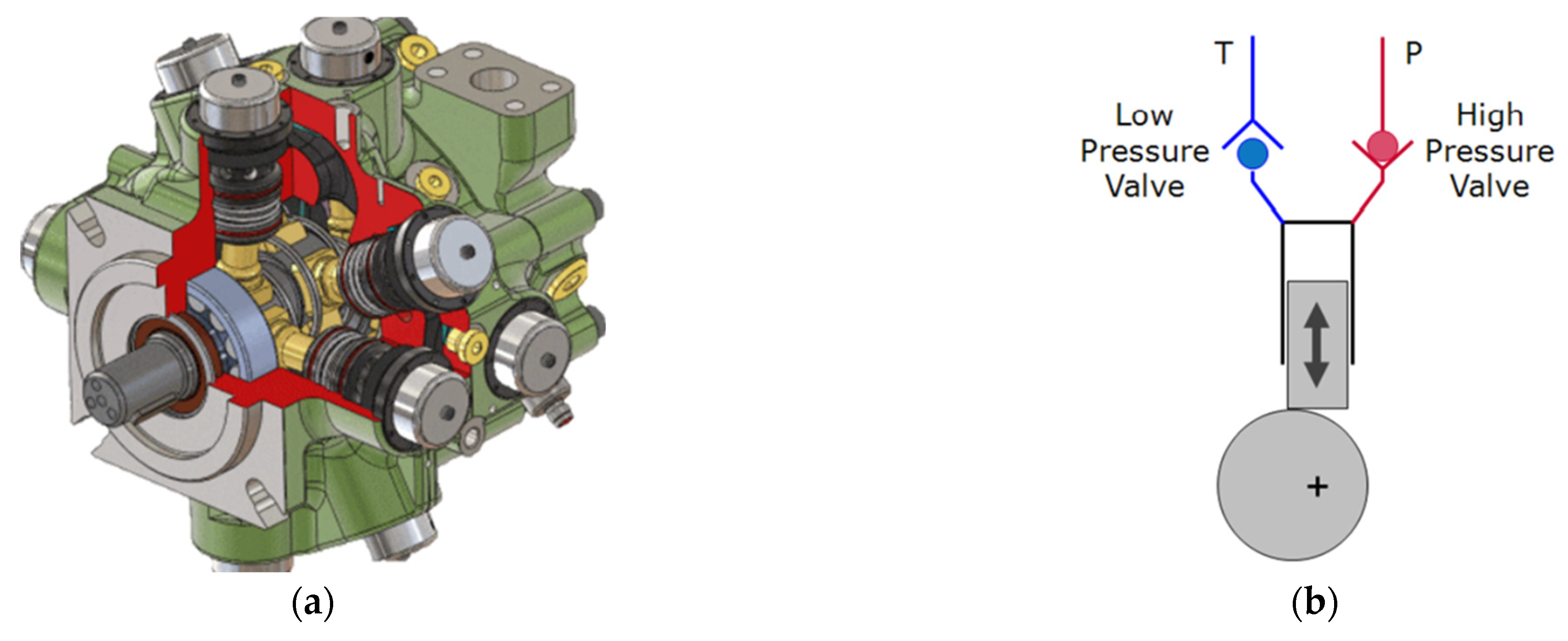
20]. One of the digital displacement pumps using the Artemis technology for on-road/off-road vehicles is shown in
Figure 1a. This variable displacement pump design replaces the conventional hydromechanical check valves used in standard fixed displacement piston pump configurations, displayed in
Figure 1b, with digital electro-mechanical valves. These valves are biased open by a spring via mechanical actuation and electrically actuated using a digital controller. These valves control the flow in each pumping element by enabling or disabling cylinders. To enable a cylinder for pumping operation, the intake valve is opened for nearly the entire intake stroke until the piston has almost reached the bottom dead center (BDC). At this time, the intake stroke is closed, and fluid is pushed through the exhaust (high-pressure) valve. To disable a cylinder in pumping operation, the intake valve is opened and left open for both the intake and exhaust strokes, diverting the flow back through the intake valve during the exhaust stroke. This enhanced control over the system enables various operating strategies that can be used for pumping, motoring, and nulling the flow based on the system’s demands [
15]. An Artemis digital radial piston pump offers many benefits compared to conventional piston pumps. For instance, it allows for achieving high efficiencies and fast and accurate responses with low idle losses. Besides achieving high power densities, it utilizes electronically tunable control modes and parameters [
21].
In recent years, Danfoss has been at the forefront and leading the investigation of digital hydraulic pumps of industry equipment, known as the Danfoss Digital Displacement
® pumps. Danfoss acquired the majority share of Artemis Intelligent Power Ltd. in 2019 and has been focused on using Artemis technology to develop more efficient pumping solutions for industrial applications and off-road markets. Their efforts have recently been focused on improving the fuel efficiency for standard combustion-driven excavators and increasing energy recovery and storage capabilities for hybrid-electric systems. Their research projects potential fuel savings greater than 50% on typical excavator work cycles [
23].
Various universities, including Tampere University of Technology and Purdue University, have been developing digital displacement pumps/motors using unique system configurations. One of these systems, explored by Tampere University, is a boxer piston pump modified to house actively controlled two-way prototype valves, known as the digital hydraulic power management system (DHPMS) [
24,
25]. An example of the system configuration is shown in
Figure 2a. Another system configuration, evaluated by Purdue University, incorporates two-way actively controlled valves with a spring return, shown in
Figure 2b [
9]. Like the Artemis technology, these systems utilized conventional piston pump architectures; they replaced the conventional hydraulic check valves with different configurations of on/off solenoid valves. These solenoids are actuated using electrical signals rather than pressure differentials. The structures discussed enable various digital operating strategies, such as partial and sequential flow limiting and flow diverting [
9]. The multiple benefits of this configuration include the flexibility of operating conditions, additional control over the system, simple system techniques, and simple implementation. However, these systems have disadvantages, including added control requirements, complex and computationally expensive controls, and expensive data acquisition systems. Another downfall of this configuration is the potential for valve losses due to inaccurate valve timing caused by delays due to electrical time constant, magnetic diffusion time, and actuator sensor delay [
26]. Researchers have continuously worked to improve digital displacement technologies by evaluating potential valve configurations that could improve the performance of digital fluid power systems [
27,
28,
29,
30]. However, the delay in common electro-magnetic solenoid valves, due to eddy currents and non-linear force characteristics, limits the full potential of digital displacement technology [
31].
A method of actuation that overcomes the critical weaknesses of on/off solenoid valve systems is mechanically actuated systems. While the mechanical actuation of valves is not new, few mechanically actuated valves are found in commercial fluid power pumps and motors. One example discovered was the Pledger motor, which uses a pendulum oscillation to open the valves on the pressure and tank side of the motor [
32]. There are also a few variable displacement mechanically actuated pumps/motors found in hydraulics applications; one example is the Dynex pump, which is controlled using a volume control stem [
33]. Variable valve timing is not new; this concept and mechanical actuation have been used in steam and automotive engines since the 18th and 19th centuries. One of the first known patents is the Corliss steam engine, the first patented variable valve timing steam engine, designed in 1859. The next include those of Fiat and General Motors, which patented some of the first systems in the automotive industry in the 1960s and 1970s, respectively [
34,
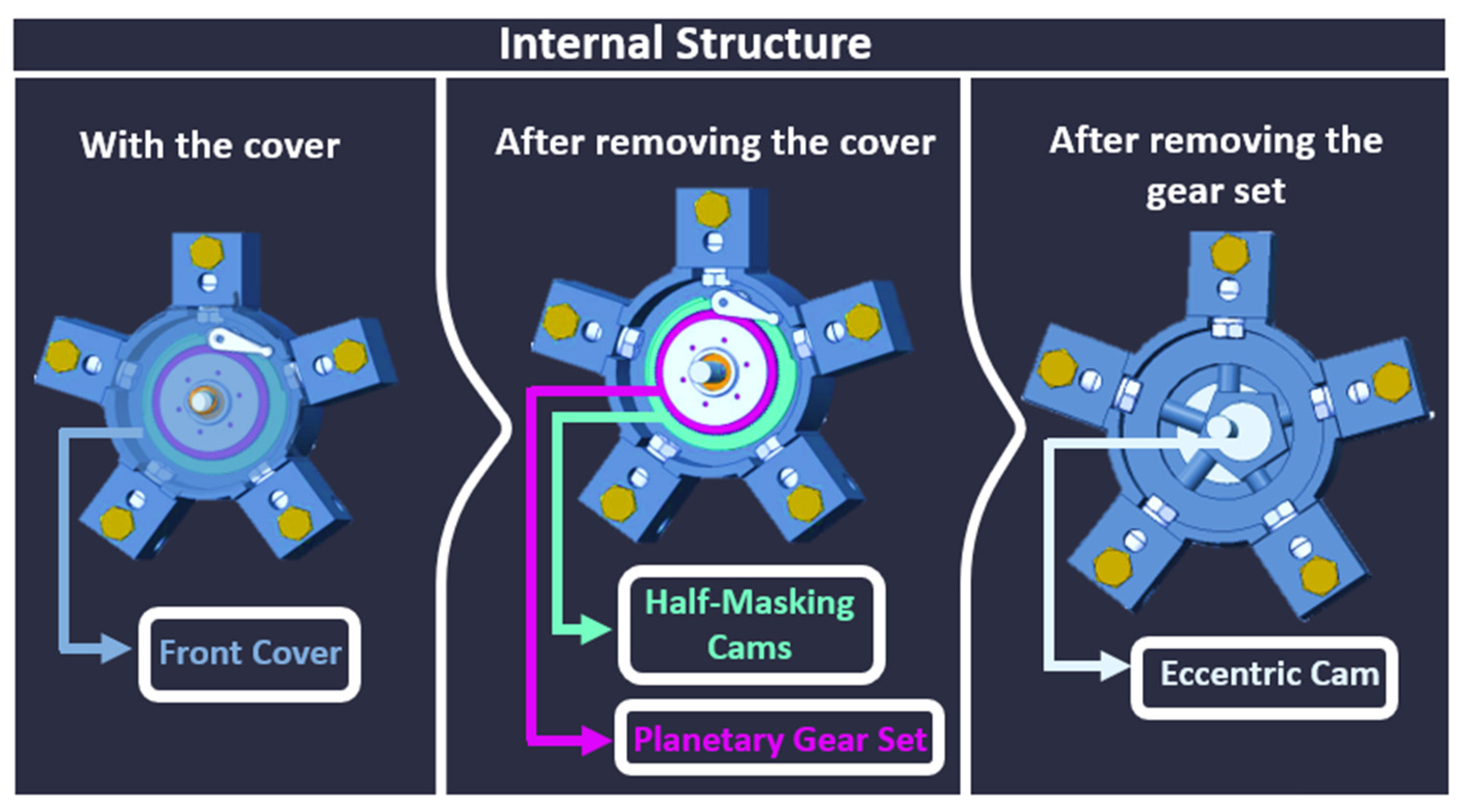
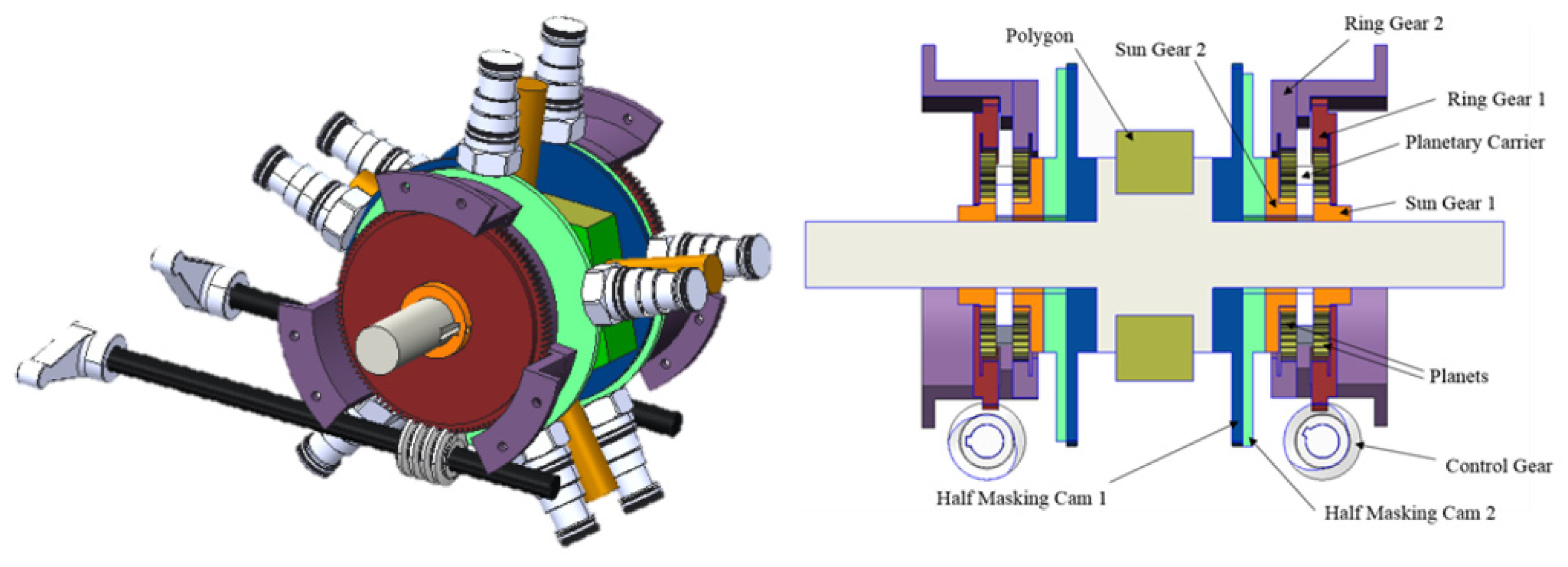
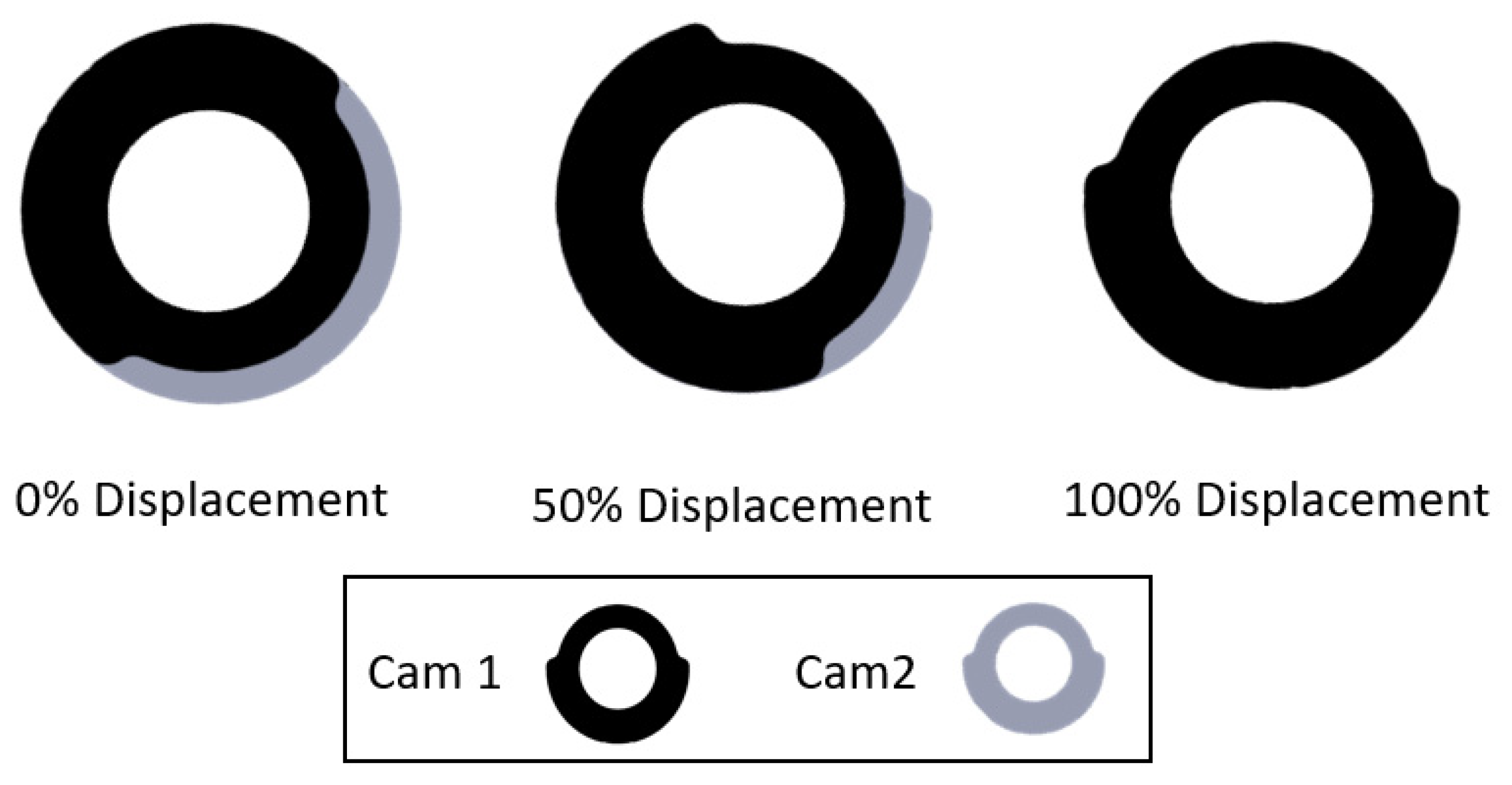
35]. Variable mechanically actuated systems on current digital pumps in research utilize variable cam geometries to actuate the intake valves, enabling variable displacement using a method referred to as partial flow diverting [
36]. The system uses planetary gear sets to phase two cams: a timing cam (Cam 1) and a displacement cam (Cam 2), shown in
Figure 3. The system’s timing cam sets the pre-compression chamber pressure on the intake stroke. The displacement cam changes the duration the inlet valve is open, changing the pump’s displacement using the flow diverting technique.
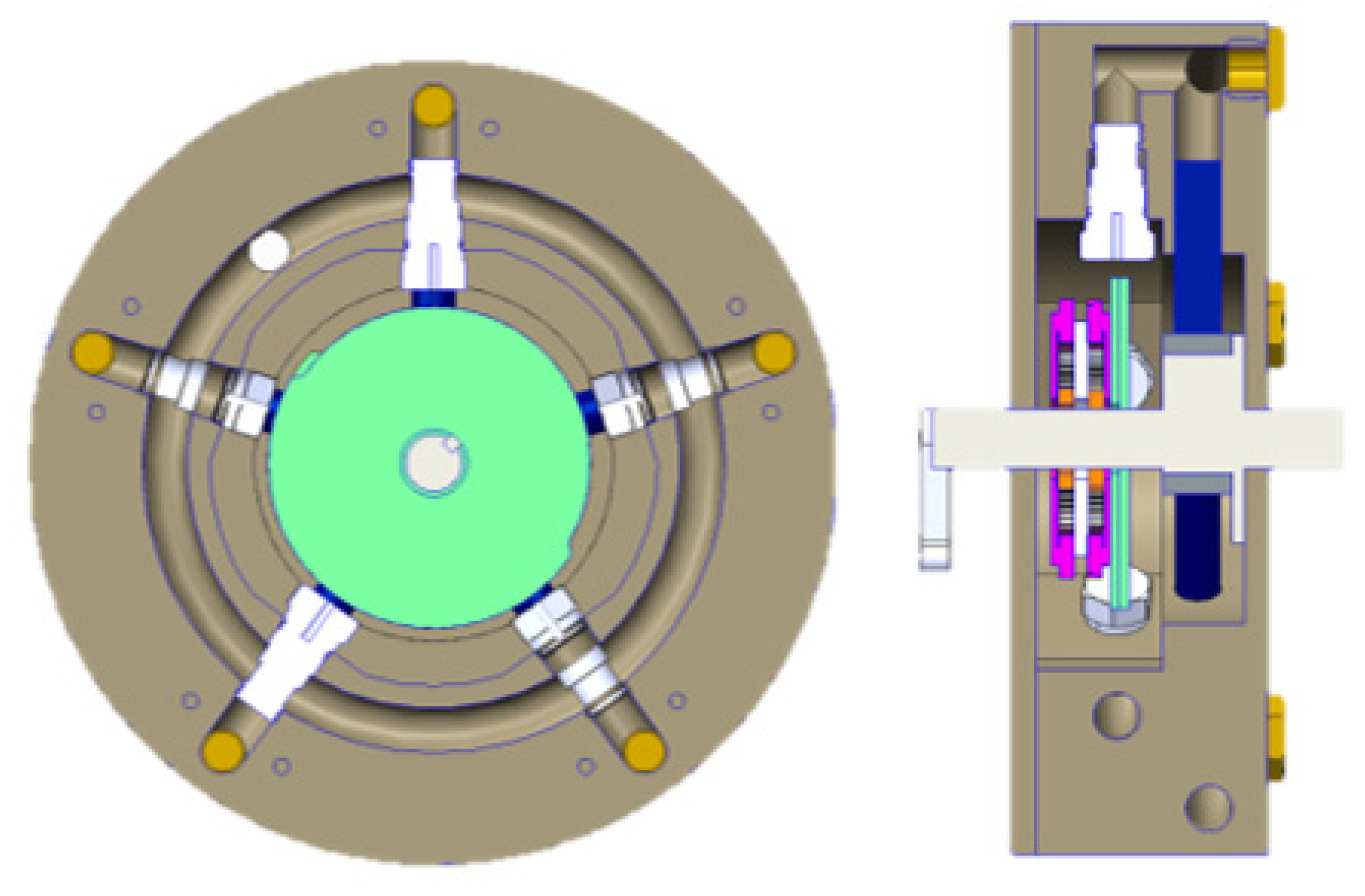
The methods for controlling the displacement can be as simple as a mechanical control lever that phases the cams via planetary gear systems [
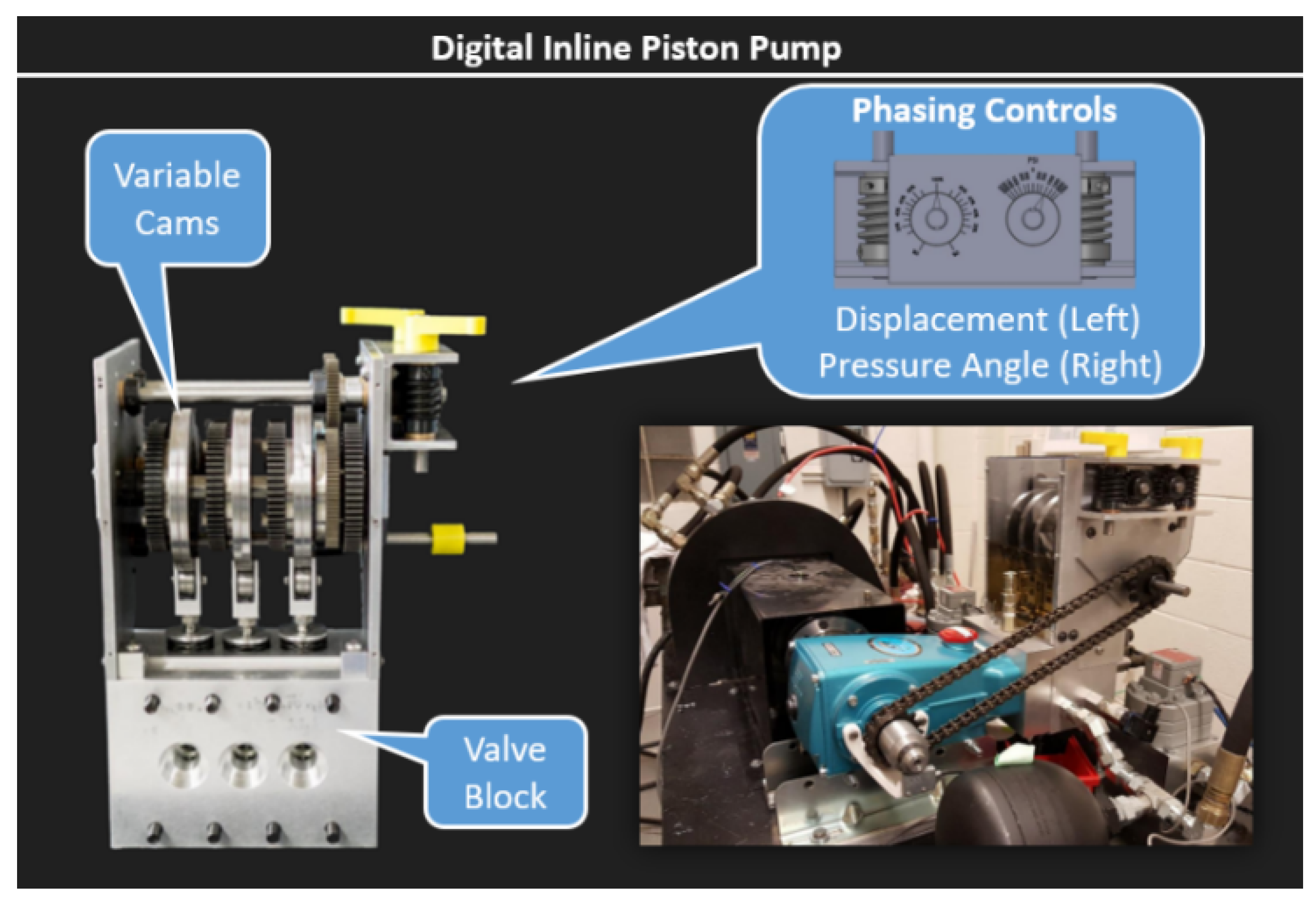
36]. Using a form of mechanical actuation, the valve duration can be controlled in real time while eliminating the need for added energy sources and complex controls. This is beneficial for proof-of-concept testing, but other simple actuation methods that provide position control, such as a servo motor or stepper motor, could also be used for simplicity. This system also promotes a more consistent and reliable actuation profile that mitigates valve delays in solenoid valves [
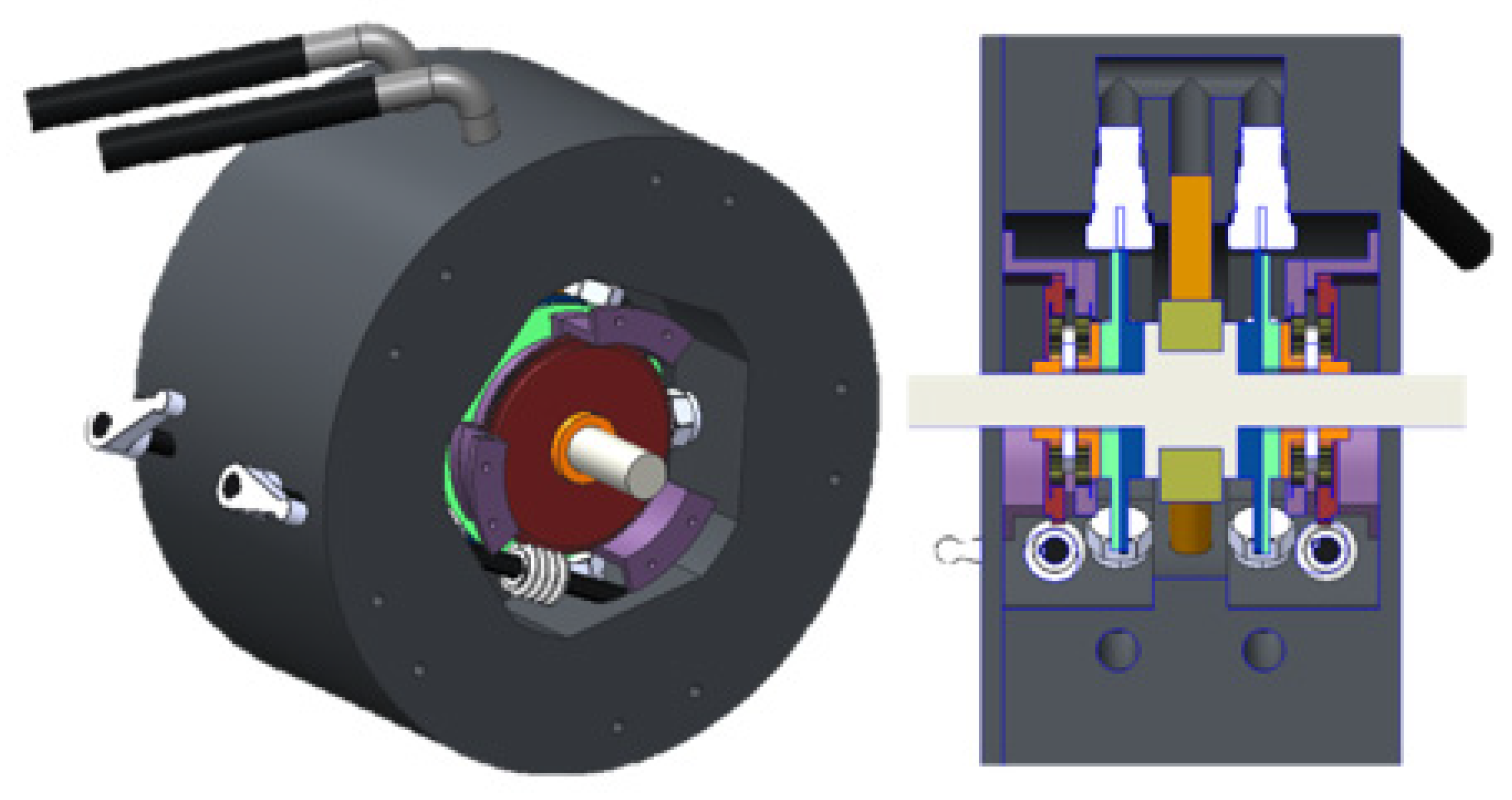
37]. A sample of the mechanically actuated system and the phasing controls that were applied to an inline piston pump can be seen in
Figure 4.
The inline piston pump was developed as a proof of concept for the first mechanically actuated digital pump prototype. To test this concept, mechanically actuated valves were designed and built for the inlet valves of the pump. However, conventional hydraulic check valves were used for the outlet valves. This configuration enabled digital pumping strategies but prevented the achievement of motoring strategies. This was one of the significant limitations of this hydraulic design configuration. However, there were also notable disadvantages to the construction and commercialization of this design. These disadvantages include multiple cam sets, enlarged systems, and various gear sets. Nevertheless, the results from testing showed favorable findings. The same base pump was used with two configurations: an electrically actuated digital pump using on/off valves (
Figure 2b) and a mechanically actuated digital pump (
Figure 4). This enabled a one-to-one comparison of the digital pump technologies. The mechanically actuated pump outperformed the on/off electrically actuated digital pump between ~30 and 75% displacement, with the most noticeable increase in efficiency near 50% displacement, where the valve delay is most crucial [
38]. Given these results, the motivation for improving upon this technology was reinforced, with the goal of a more refined design for future commercialization, especially since the mechanically actuated system was not optimized for the digital inline piston pump.
Another piston pump configuration that is better suited for the digital mechanically actuated system is radial piston pumps. This is because the design configurations enable the inlet and outlet valves to be radially aligned around the main piston driving cam. In this arrangement, all the inlet and/or outlet valves can be actuated with either one or two sets of variable cams. This configuration significantly reduces the gearing and cam sets needed for the pump. This is especially true for multi-piston pumps with larger quantities of pistons, generally used for reduced pulsations. Thus, a gap in the research was identified, and a plan for designing a digital radial piston pump was created.
The rest of this work is organized as follows:
Section 3 presents the various concepts for implementing mechanically actuated valving systems on radial piston pumps.
Section 4 and
Section 5 present a simulation model and results for a digital radial piston pump used to evaluate the chosen design’s feasibility and create a design tool that can be used for future digital pump designs. Lastly,
Section 6 presents this research’s final discussions and noteworthy conclusions.
4. Simulation Model Development
Of the designs conceptualized, the four-quadrant digital pump design comprised the best traits for a mechanically actuated system. Thus, a simulation model was created to evaluate the potential efficiency a digital radial piston pump could reach if a pump were developed, built, and tested. A simulation software package, GT-SUITE, by Gamma Technologies, was used to create the model for the digital pump. This software was chosen based on its multi-physics-based platform, which has embedded libraries for fluid power components and mechanical actuators that can be used to simulate the geometry of the variable-geometry cams [
41]. A simulation model was created for the two digital pump configurations to evaluate the system’s efficiency and performance. The first model developed corresponds to the third concept (two-quadrant digital pump), and the second model, the fourth concept, a fosur-quadrant digital pump/motor.
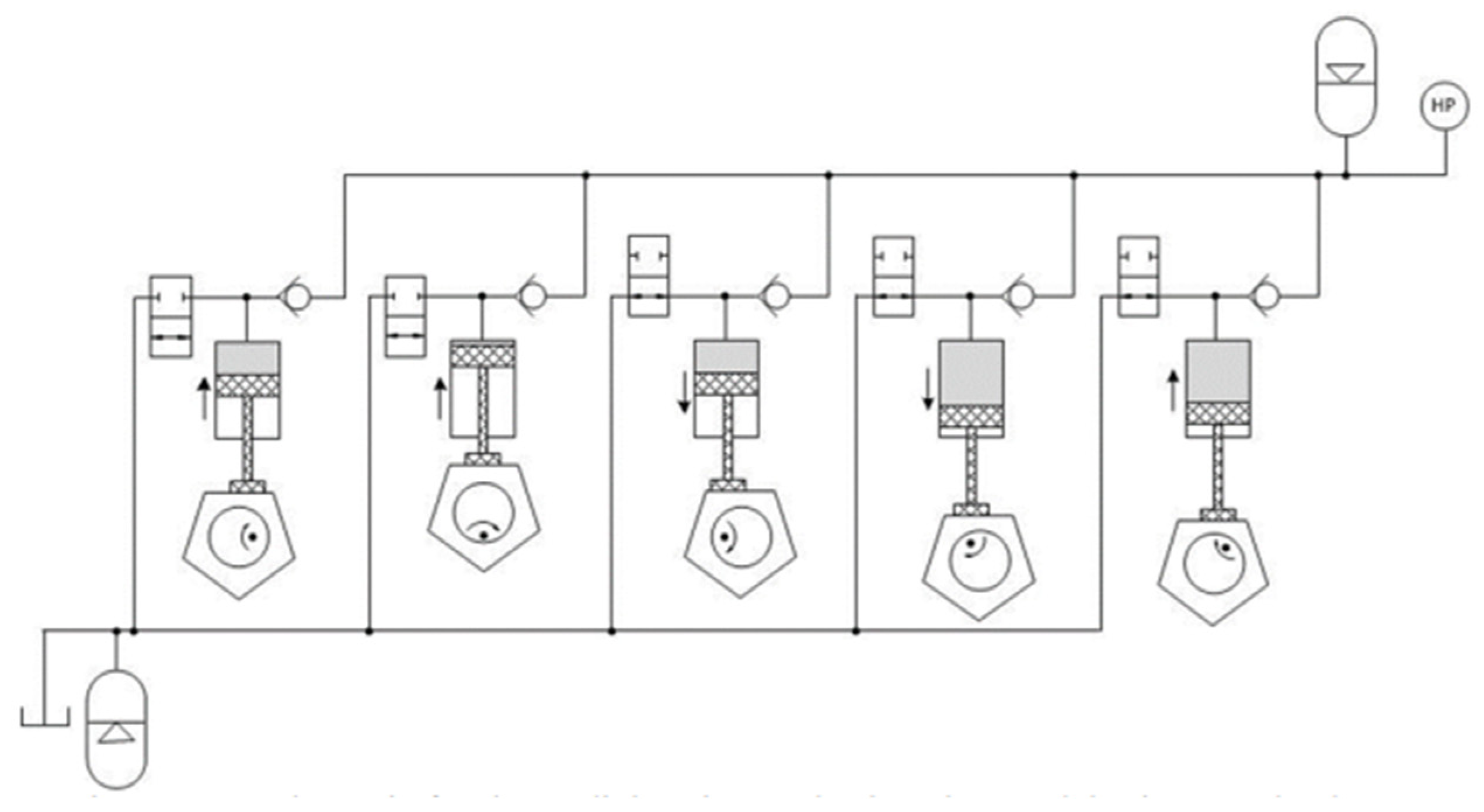
Figure 10 shows the hydraulic circuit for the two-quadrant digital pump, illustrating the hexagonal eccentric main driving cam and the on/off valve driven by the half-masking cam set on the inlet port and the hydraulic check valve on the outlet port. The hydraulic circuit used in this configuration is shown in
Figure 10.
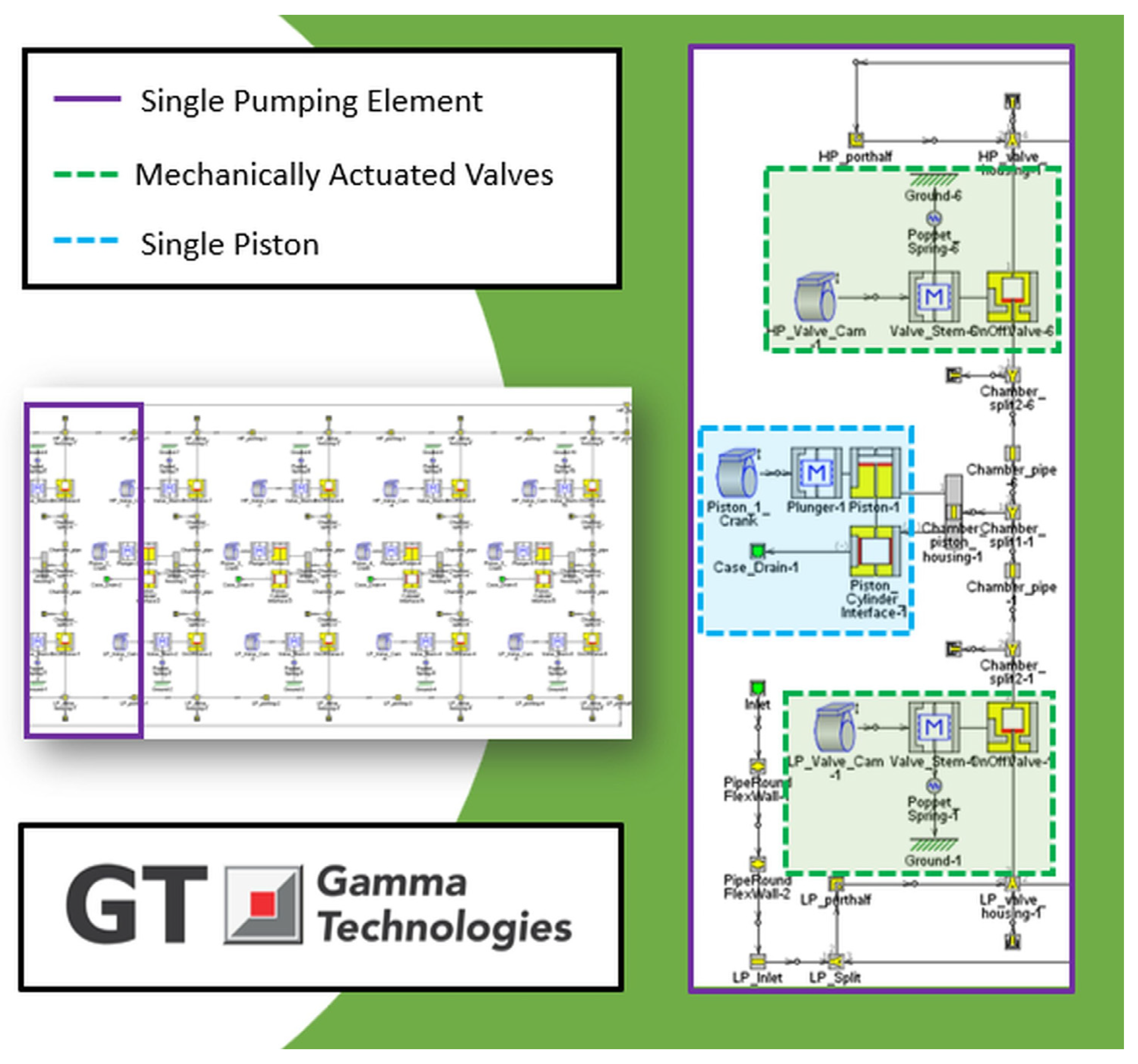
The first simulation model, shown in
Figure 11 below, is a single-piston pumping element for the two-quadrant digital pump. The figure illustrates the modeling techniques used on a single pumping element within a five-piston digital pump model. A simulation model was first developed for a single pumping element and duplicated various times with the respective flow geometries added to create the five-piston pump models. Inside the piston component, highlighted in blue, is a cam simulating the lift of the eccentric cam geometry driving the pump’s pistons. The connecting blocks simulate the piston geometry and clearances, the pump’s mass, and the pumping chamber’s geometry, including the dead volume in the cylinder. The frame highlighted in green shows the mechanically actuated flapper valve connected to a cam on the inlet side of the piston. Various half-masking cam profiles are implemented on this cam block to emulate the different cam profiles achieved by phasing the half-masking cam set. Lastly, the frame highlighted in red illustrates the hydraulic flapper check valve used on the outlet port of the pump. The hydraulic circuit is shown below.
The second model was developed given that the digital pump could work in various modes if symmetrical valves were used on the cams, as shown in
Figure 12. However, it was later discovered that, due to the overlap in cam profiles caused by the cam geometry, there is an open condition in which both valves would cause the flow to be open simultaneously while using a flow diverting strategy. The simulation breaks the fundamental rule that the half-masking cams must actuate the valve for ~180 degrees or greater. However, this configuration could still be used with the addition of other components, such as a pilot-operated bidirectional check valve on the inlet and outlet of each chamber (along with the on/off valves). Thus, the concept is simulated using the on/off valves without adding any extra components in the model, as it is assumed they would play a minor role in the efficiency of the pump when optimized. Otherwise, it simulates how the system would work if the cams could break the profile, achieving > 180-degree lift rule.
The second simulation model, shown in
Figure 13, demonstrates the cam, piston, check valve, and respective flow geometries using the fourth conceptual design to evaluate a pump developed to achieve the four-quadrant pumping/motoring operation. The differences in this model compared to the two-quadrant pump include the varied flow geometries for the respective design and the addition of a cam and return spring attached to the outlet flapper valve. Attaching a cam and a return spring to the valve simulates a mechanically driven valve that follows a pre-determined cam profile.
5. Results
The simulation model developed for these pump concepts creates a platform that can be used to evaluate the system’s overall performance throughout its various operating conditions. It also enables the opportunity to vary the input parameters of the system and optimize the design of the pump. Since this pump was designed from scratch, various simulation input parameters, such as valve geometry, valve mass, piston mass, and piston clearance, can be varied to extract data from the model. This can be used to calculate the pump’s performance based on the results, including input power; output power; volumetric, mechanical, and overall efficiency; and flow and pressure characteristics.
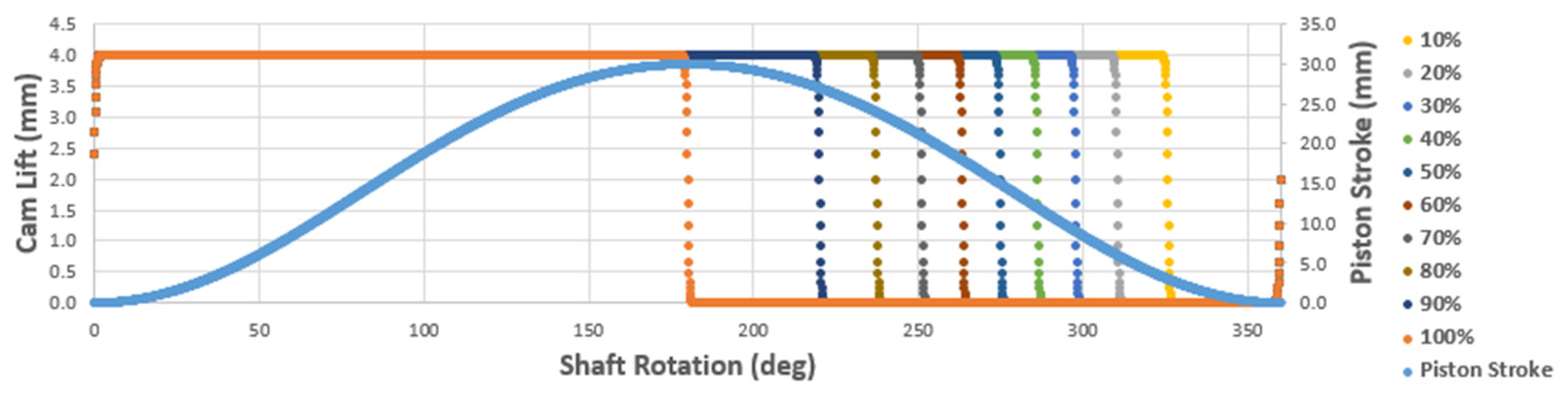
Samples of the cam profiles used in the half-masking cam block are shown in
Figure 14 below. These profiles provide the opportunity to evaluate the pump performance at various displacements and operating conditions. The cam profiles are plotted against a pumping element’s piston stroke to show the valve states during a single pumping operation.
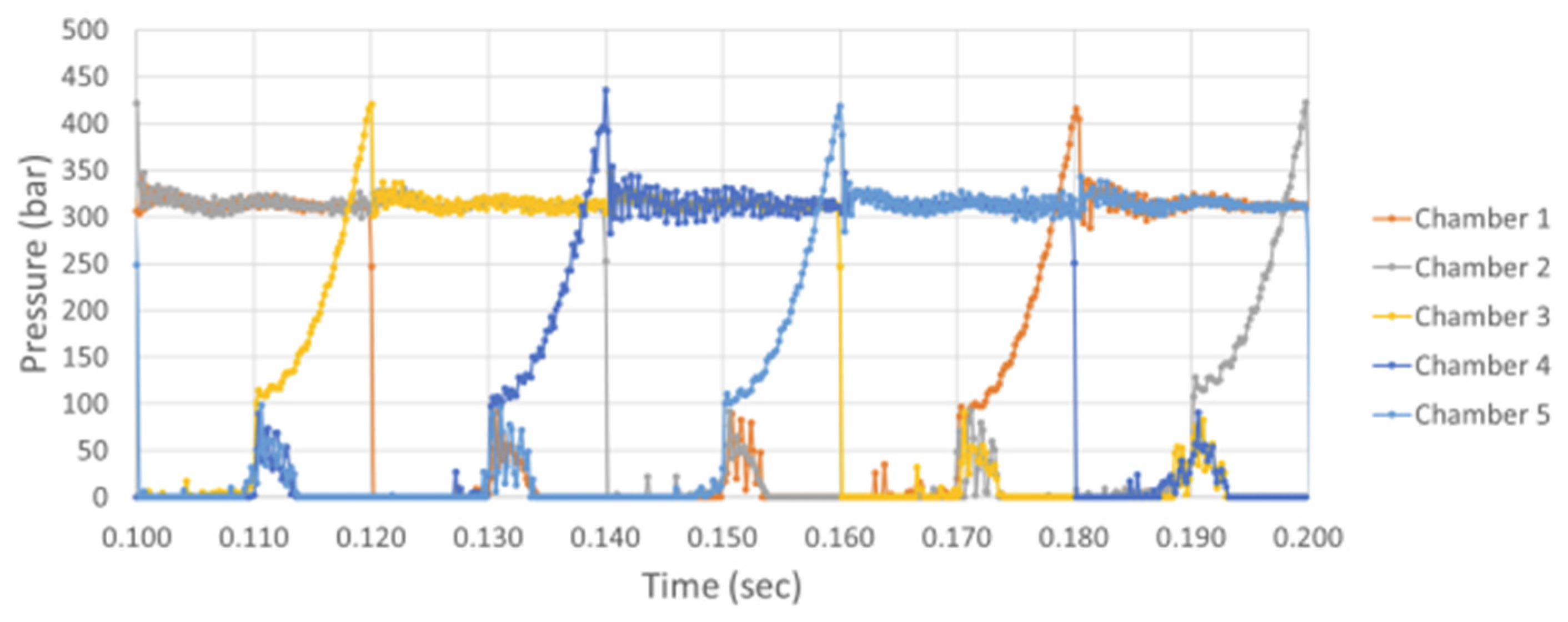
Based on the theory, the simulation of the two-quadrant digital pump exhibited predicted behaviors as expected.
Figure 15 below shows the pressure variation in each chamber during the pumping operation. The operating conditions simulated in this example portray a 100% pump displacement at a 600-rpm shaft speed and a 300-bar outlet pressure boundary.
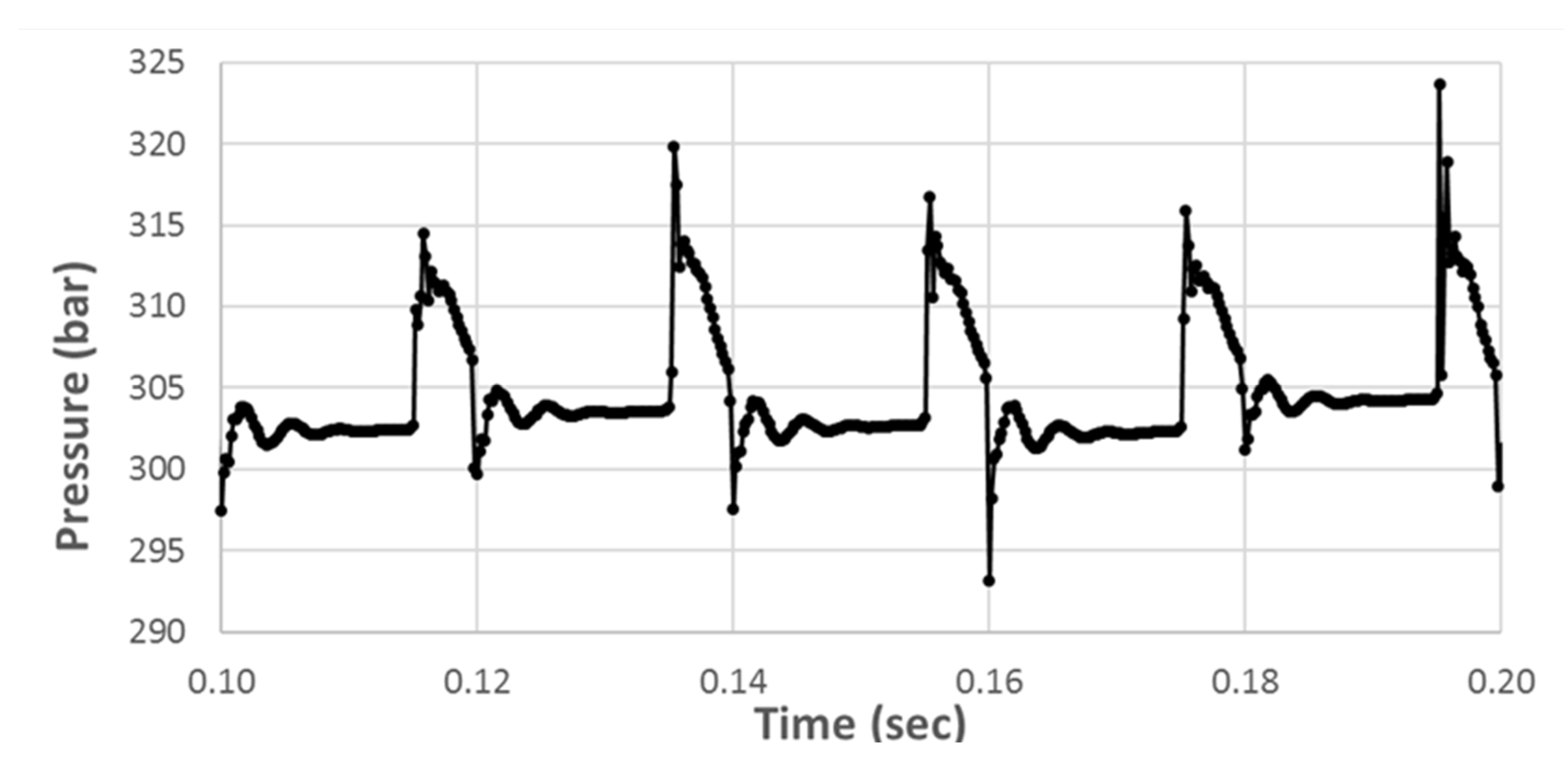
The combined pressure output on the outlet port does not stray far from the desired outlet pressure of 300 bar, with a peak average of approximately 310 bar, as shown in
Figure 16. Each oscillation is caused by the individual chambers charging the outlet pressure at the end of each pumping stroke. Since the pump shaft speed is 600 rpm, a single shaft revolution occurs every 0.1 s. Thus, there are five peaks in every 0.1-s interval. A pressure drop is shown at various conditions, likely attributed to a situation where a check valve has not fully seated due to the check valve being open as the pump elements begin its intake stroke, starting to pull a vacuum pressure in the chamber before the check valve closes.
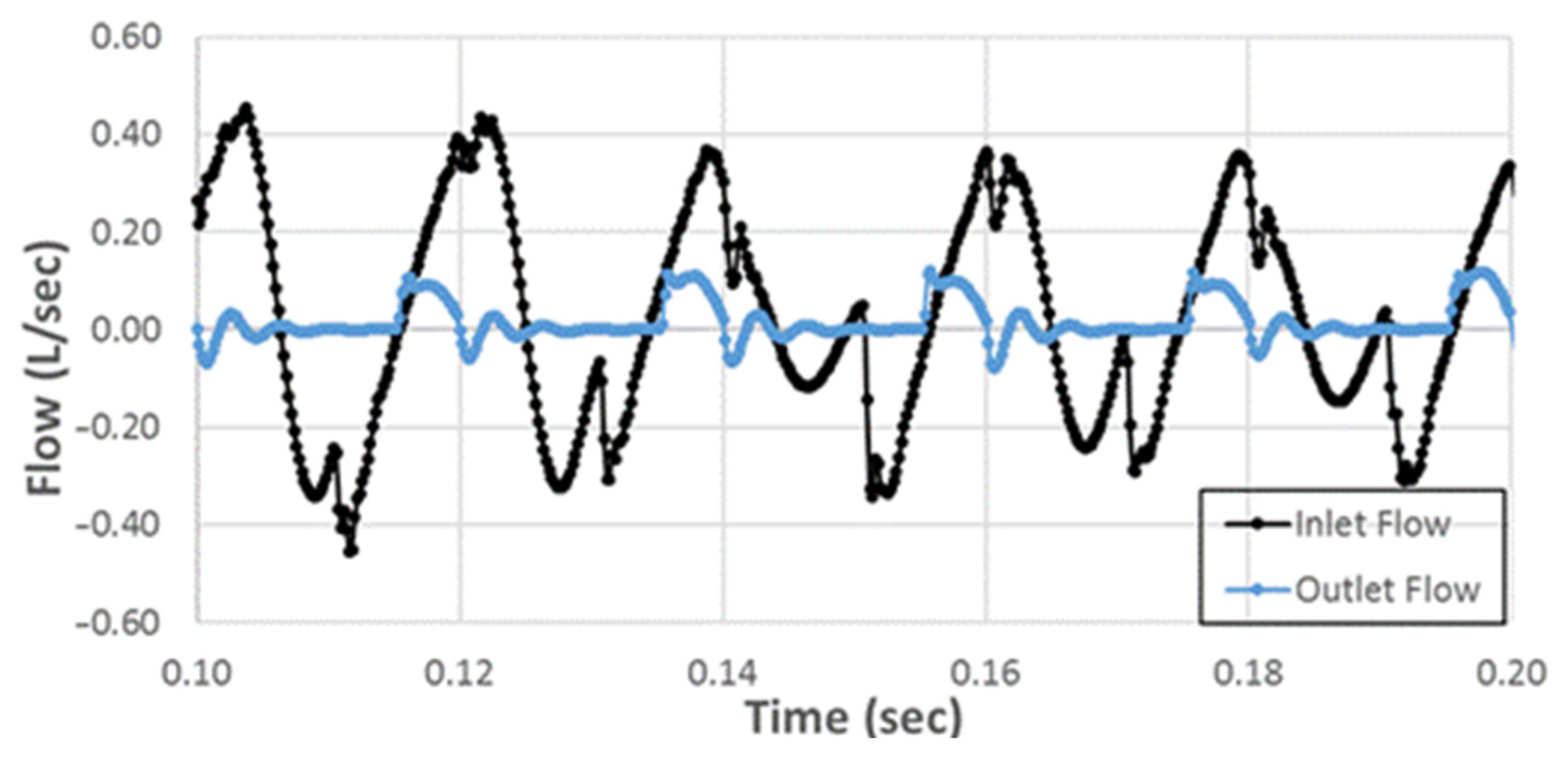
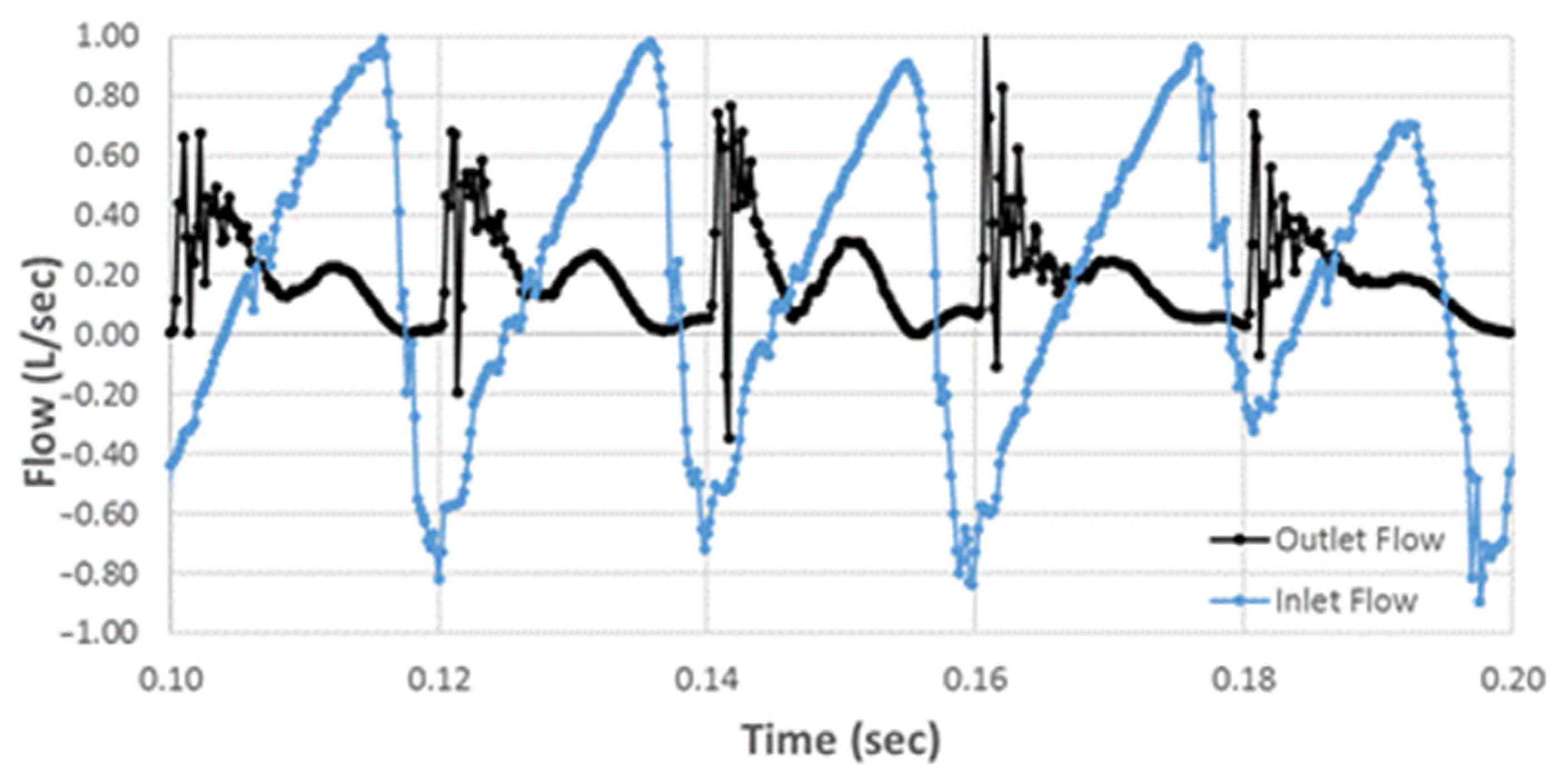
Modifying the cam profile on the inlet port enables the simulation model to output results corresponding to various desired displacements. An example of the inlet and outlet flows of the pumping operation at 10 percent displacement is shown below in
Figure 17. As shown in the Figure, the inlet flow shows positive and negative flow corresponding to the flow direction into and out of the flow geometries on the inlet side of an individual pumping chamber, validating the flow diverting strategies used on the pump. The outlet flow shows the impact of one pumping element on the outlet pressure.
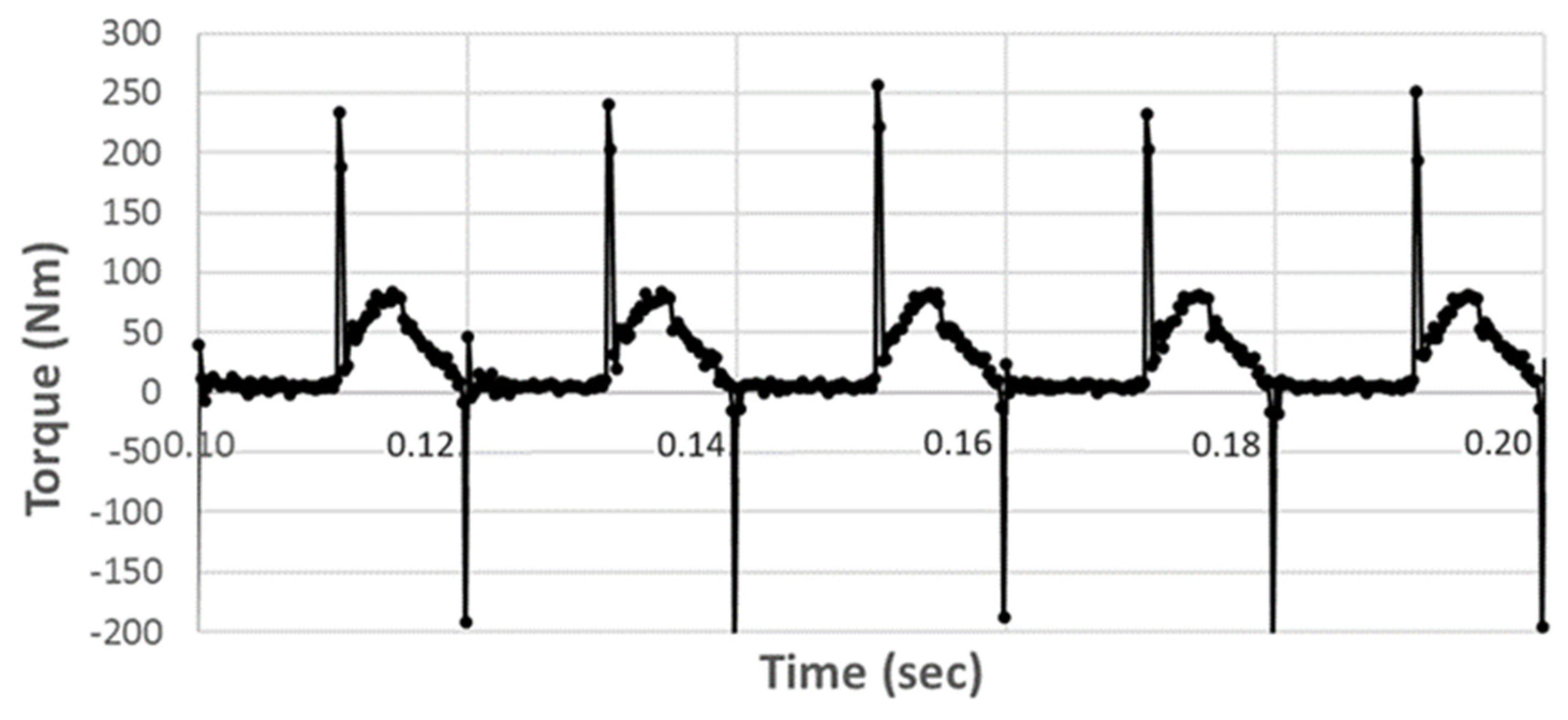
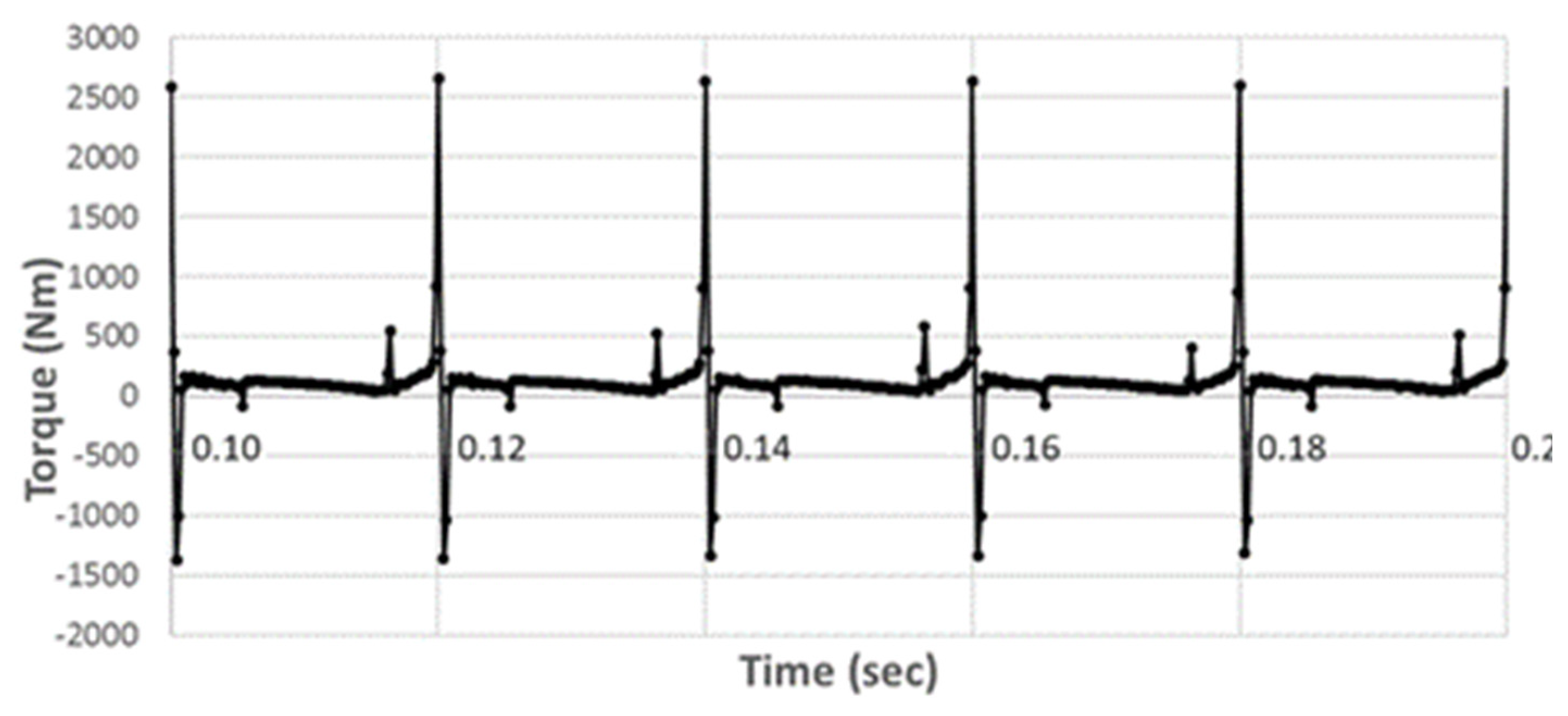
The corresponding input torque required to actuate the pistons and the inlet cams is shown in
Figure 18. The total torque output from the simulation is used to calculate the mechanical efficiency of the pump. The torque spikes correspond to the torque required to open and close the inlet valves. As shown in the figure, most of the energy used to actuate the valve is recovered while closing the valve.
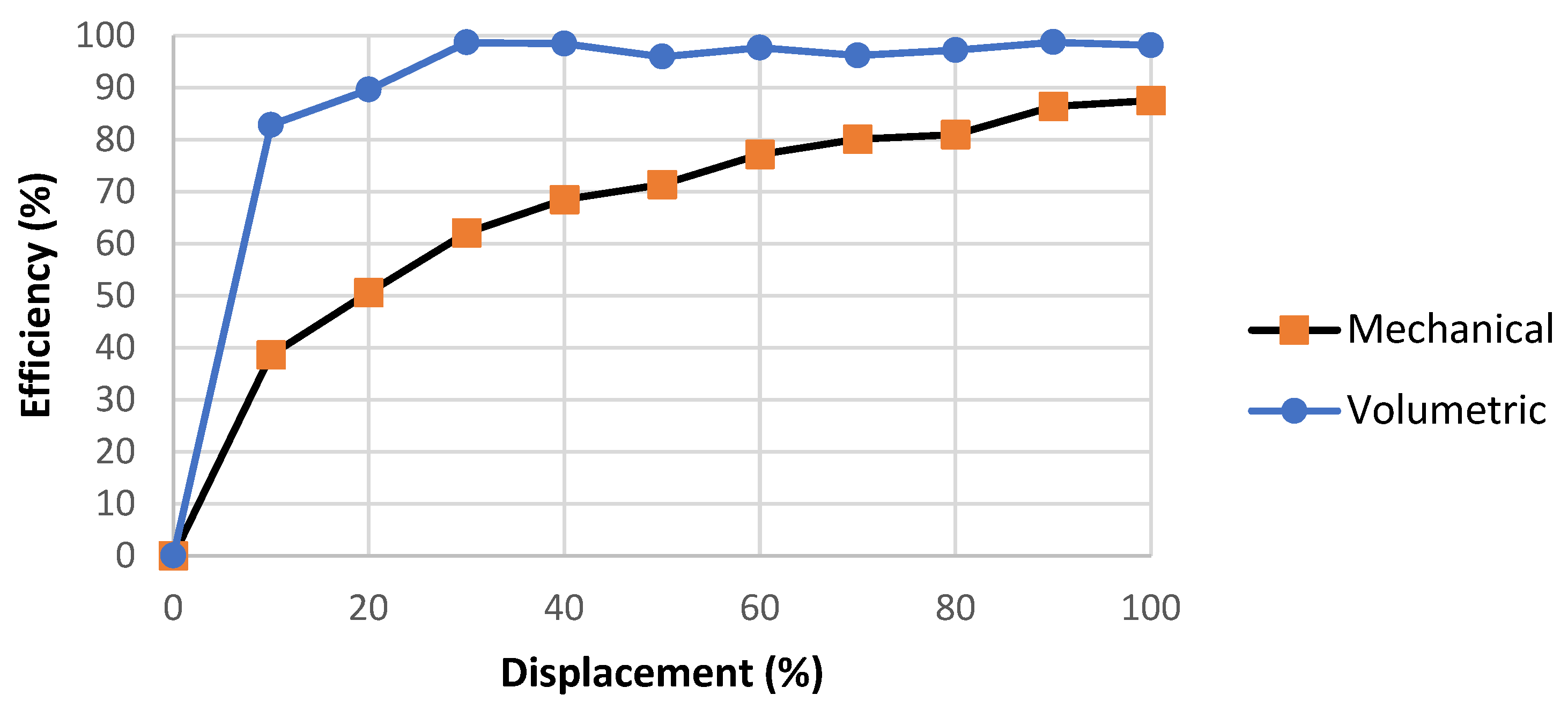
The mechanical and volumetric efficiencies of the two-quadrant digital radial piston pump are shown in
Figure 19. The results show that the pump can achieve high volumetric efficiencies in most of its operating conditions. Although lower, the mechanical efficiency follows a similar trend and is still above 50% efficient even at low displacements. Hence, the pump can achieve a high total efficiency across the bandwidth of its displacement.
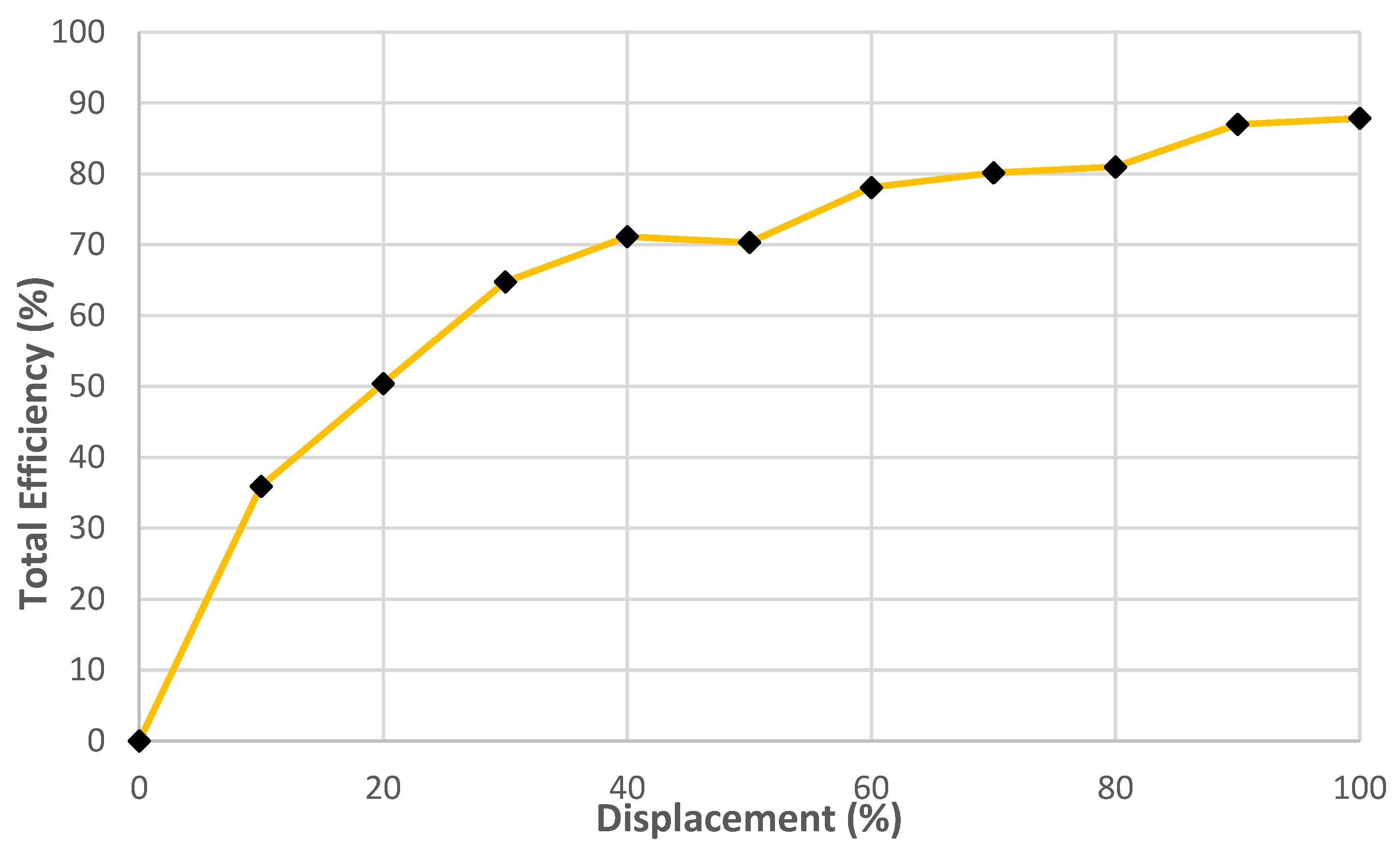
The total efficiency curve is calculated using the mechanical and volumetric efficiencies at each simulated point and is shown in
Figure 20. The efficiency curve shows that the pump can achieve relatively high efficiencies across its bandwidth but has not been fully optimized to its potential. Thus, the system’s efficiency shows potential for continuous improvement and development for applications that could benefit from using two-quadrant mechanically actuated digital pumps.
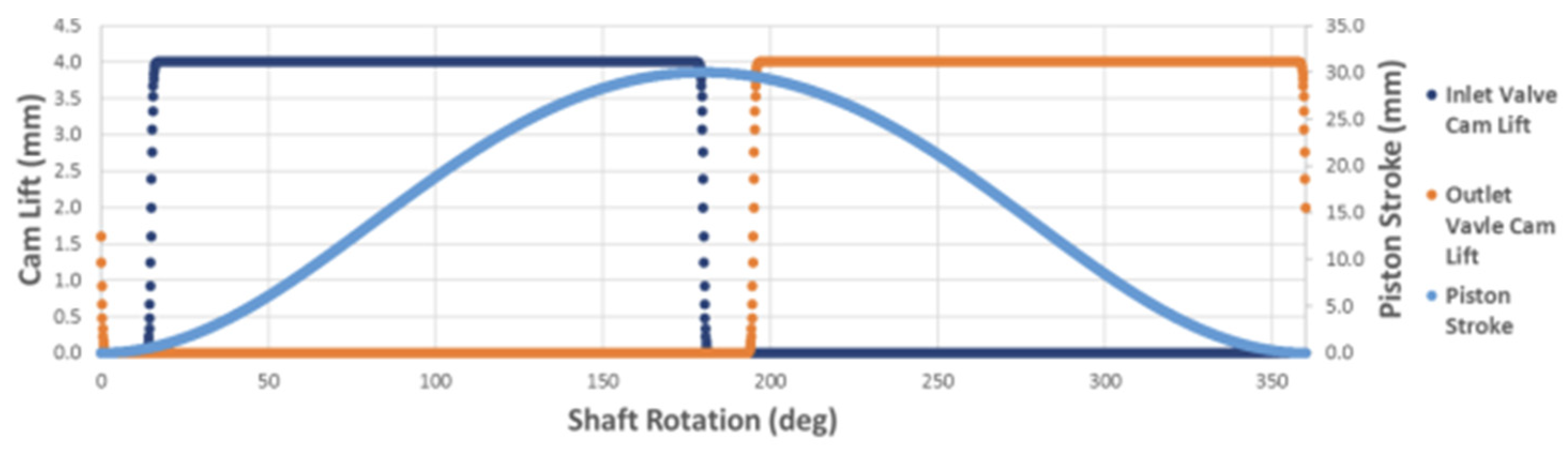
An example of the cam profiles used for the four-quadrant digital pump model is shown below in
Figure 21. The example provided shows the configuration for 100% displacement of the pump. The inlet cam profile is dark blue, while the outlet valve can be observed in orange. The piston stroke is plotted against these profiles to show these cam actuations concerning the piston stroke.
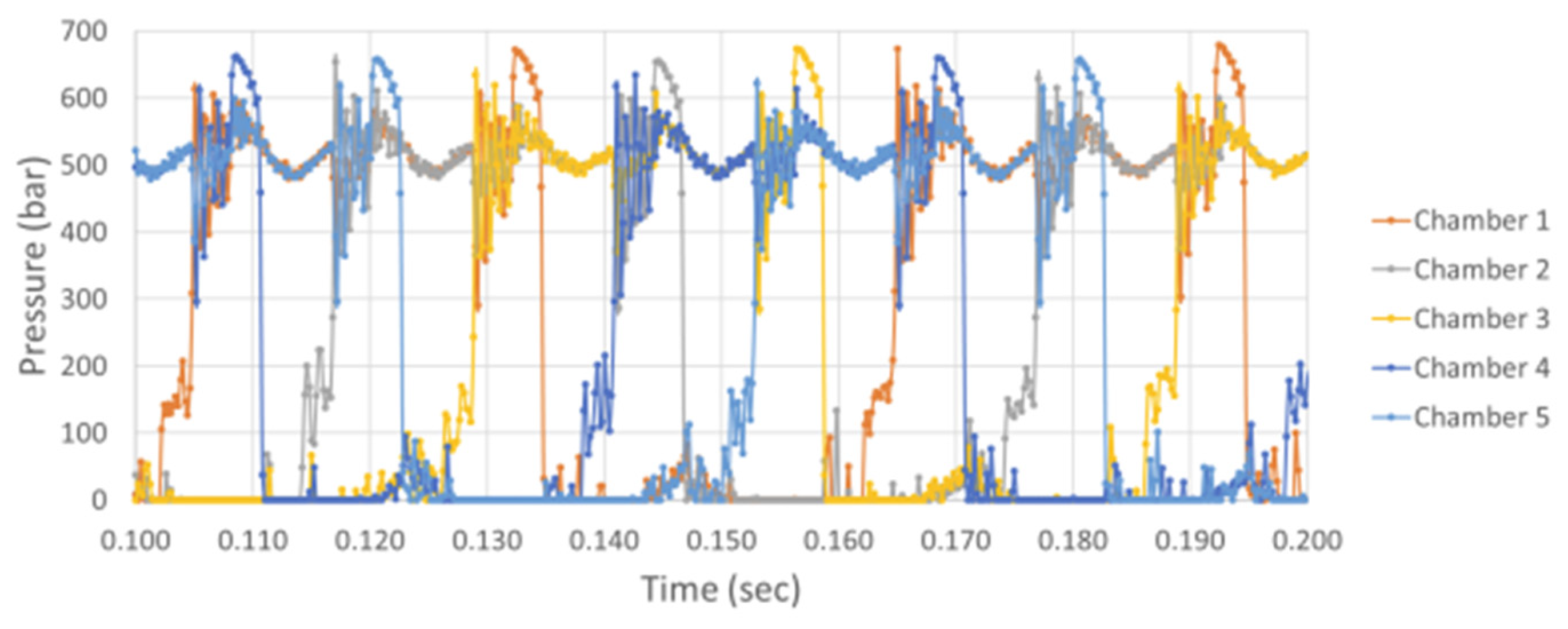
The results of the four-quadrant pump also behaved in accordance with what was expected from the simulation based on the theory. The simulation shows similar output when comparing the four-quadrant pump against the two-quadrant pump. The pressure at each pumping chamber is plotted at 100% displacement to evaluate any system discrepancies, as shown in
Figure 22. The system shows higher peak values due to no overlap in the cam profiles. This causes the pressure to peak inside the pumping chamber before the outlet valve opens.
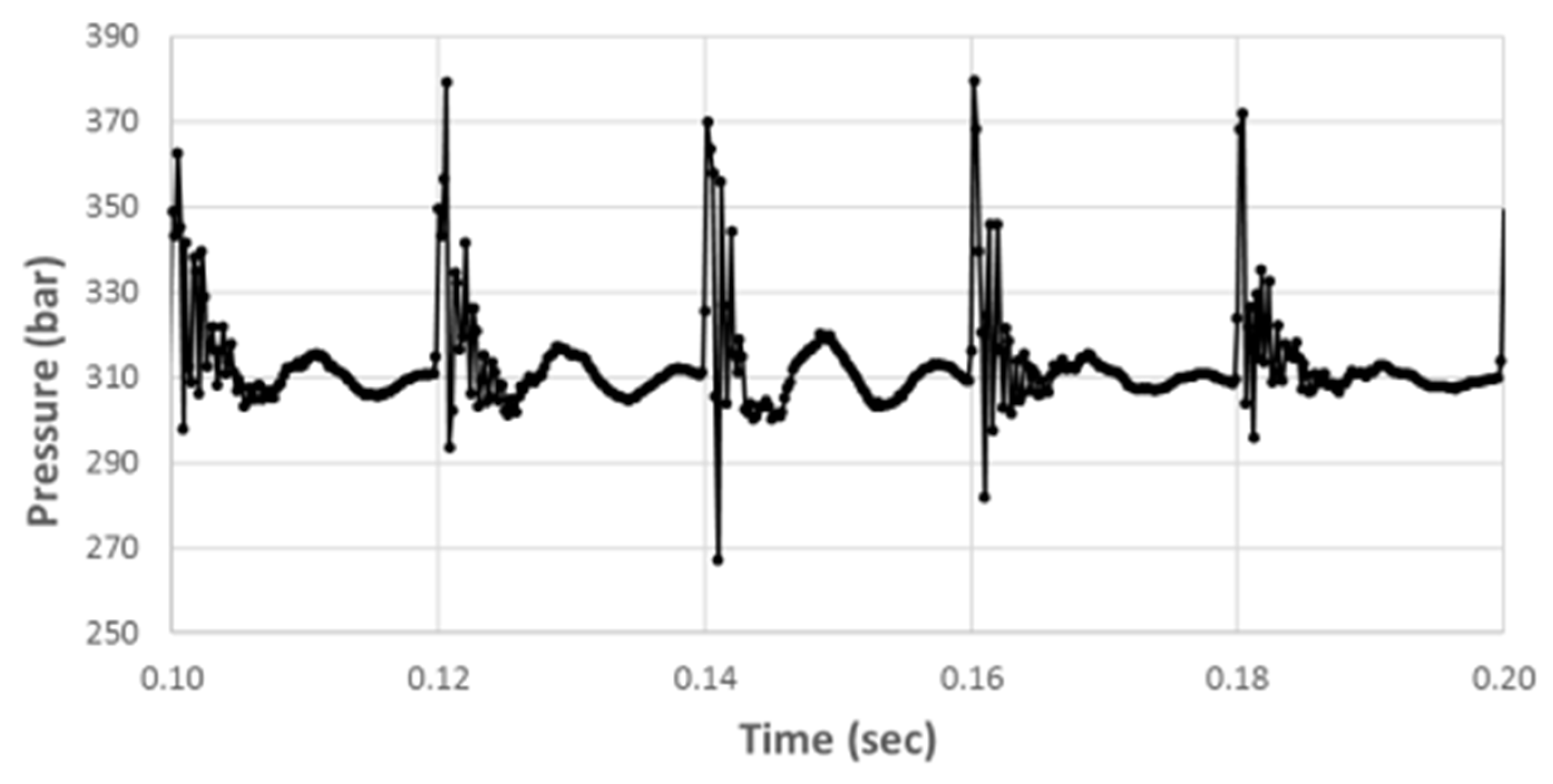
The outlet pressure of the system returns an output similar to that of the two-quadrant digital check valve pump. However, this system shows higher peak pressure amplitudes caused by insufficient intake and exhaust valve overlap. However, the system exhibits less oscillation in the overall pressure after the system peaks and the pressure starts to equalize, as shown in
Figure 23.
A sample of the results showing the inlet and outlet flows at 50% displacement is shown in
Figure 24 below. The negative flow of the inlet valve shows fluid being passed back through the pump’s inlet valve, validating the digital hydraulic pumping strategy: partial flow diverting [
40].
As expected, the total torque required to actuate the piston and cams increased on the four-quadrant digital pump model, as shown in
Figure 25. However, the peak torques caused by the outlet valve showed a significant increase in torque required to actuate, likely caused by the pumping chamber reaching peak pressures before passing through a smaller flow geometry of the on/off valve than the check valve. Increasing the flow geometry and adding more cam overlap could reduce the amount of peak pressure the cylinder would reach, mitigating the amount of torque required by the system.
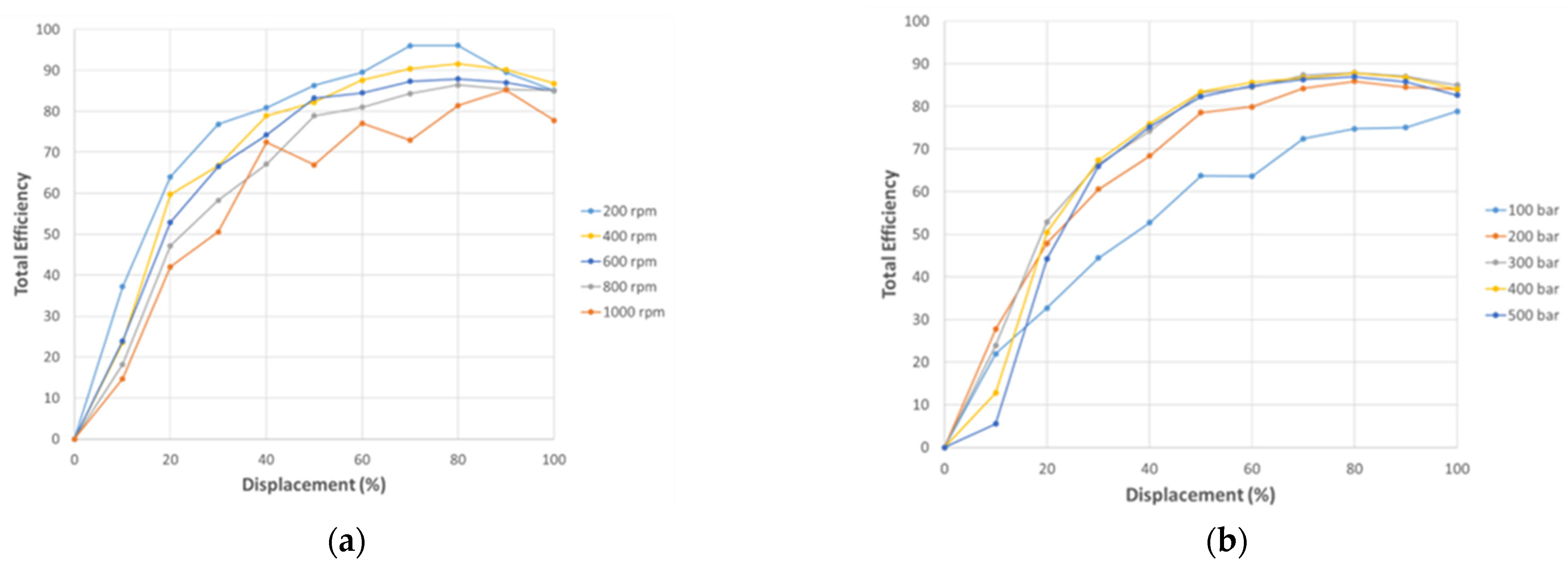
Since this research aims to maximize the pump’s efficiency, various input parameters were varied to evaluate the effects on the system concerning overall efficiency. A sample of the system results measuring overall efficiency at various operating conditions can be seen in
Figure 26 [
40]. The results show the data from one sweep of simulation, evaluating the pump’s overall efficiency by varying shaft speed at a specific pressure (left) and the overall efficiency by varying pressure at a particular shaft speed (right).
Based on the findings from the simulation,
Figure 26a shows the simulated pump could reach a peak potential overall efficiency of approximately 95 percent at low shaft speeds (200 rpm) and higher displacements (between 75 and 80%). The results show that the pump could achieve around 80% overall efficiency at ~40% displacement at low shaft speeds, based on the current input parameters used in the system. At 1000 rpm shaft speed, the numerical simulation experienced oscillations shown in the results, which must be examined further.
Figure 26b shows the efficiency at a fixed shaft speed as pressure varies on the system. With the current input parameters, the pump could achieve the highest efficiencies around 300–400 bar while running at 600 rpm and reach a peak of approximately 87–88% total efficiency. The graph shows that the current pump configuration reaches its best overall performance across the pump’s bandwidth of displacement around 300 bar; as pressure increases, the leakage losses become greater and begin to drop the overall efficiency curve. Varying the input parameters of this pump, more results can be generated to optimize the pump’s performance and evaluate the peak efficiency that could be achieved if the pump were to be built. This simulation model was created to be used as a strategic tool for component selection, sizing, and geometry of future four-quadrant pump designs to evaluate the feasibility of their design.
6. Conclusions and Future Work
This research evaluates various mechanically actuated digital pump concepts using variable-geometry cams. The different pump designs were assessed based on the characteristics of the design, the overall benefits, and the potential for future prototyping. Amid this research, it was discovered that many off-the-shelf pumps do not currently employ a design that could house a mechanically actuated valve system internally within the pump without significant modifications. Thus, various configurations were conceptualized for what a digital pump might look like if one was created from start to finish using the mechanically actuated valving system. Continued and future research in digital radial piston pumps will benefit from these conceptual designs and the continued search for a pump with a suitable design for proof-of-concept testing and analysis.
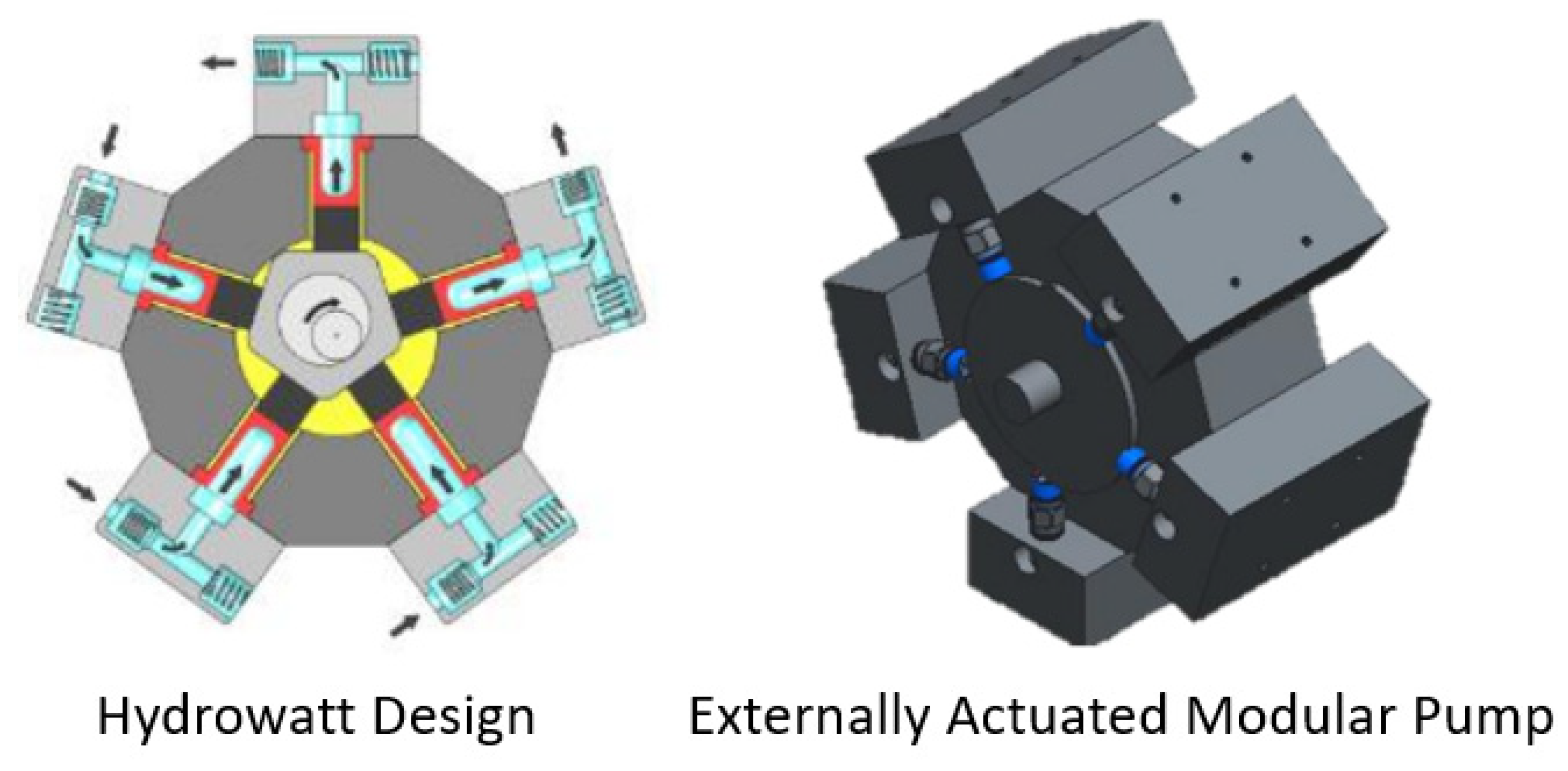
Each of the pumps shows significant potential in various ways. The first two conceptual designs show potential for implementation as proof of concept and could benefit from further design revisions and improvements depending on their application. Concept 2 is noteworthy for its feasibility, manufacturability for proof of concept, and production potential. This design shows the capability of creating a digital pump from an off-the-shelf pump technology (Hydrowatt design) and enables the advantages of using an internally actuated cam design. One attribute of this design that makes it significant for proof-of-concept sake is its modular valve block, which would reduce the complexity of machining, fine-tuning, and testing modifications. The modular valve block design would also be highly beneficial in production for its simplicity and scalability. It offers a valve block that could be utilized across various pump sizes (e.g., three, five, seven pistons) within a production line. However, the current Hydrowatt pump is much larger than the pump size sought for proof-of-concept testing for its overall size and power requirements.
Regarding commercializing the pump, the third and fourth concepts exhibit the potential to be more refined commercial designs, depending on the application requirements. The third concept features a smaller and less complex design, but it is limited to two-quadrant pumping. While the most complex, the fourth conceptual design can achieve four-quadrant operation, expanding the capabilities of the mechanically actuated digital pump systems. Given its increased operational flexibility, controllability, and production design, this design shows the greatest potential as a final design for mechanically actuated systems. Since the pump has two sets of half-masking cams actuating the inlet and outlet valves, the pump can achieve digital pumping and motoring with either shaft rotation. Thus, the overall potential for this pump is much more significant than that for the previous designs; however, the complexity of building a pump from scratch does not make it desirable for proof-of-concept testing. Once a proof-of-concept design is created and validated using a simpler design, this design could be considered as a final design. The casing design of this pump is also designed to develop a production pump that could be created from a cast casing design. Some sample results from the simulation show the pump in an un-optimized state, showing the capabilities of the model and the validation of the digital pumping strategies. This model will be used to optimize the final design of the four-quadrant pump and as a template for evaluating potential proof-of-concept designs for future testing and validation. Finally, the simulation model was created for the four-quadrant pump based on approximated input parameters of a pump if it were to be designed as a final production model.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}