
Bistable Actuation Based on Antagonistic Buckling SMA Beams




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Material Characterization
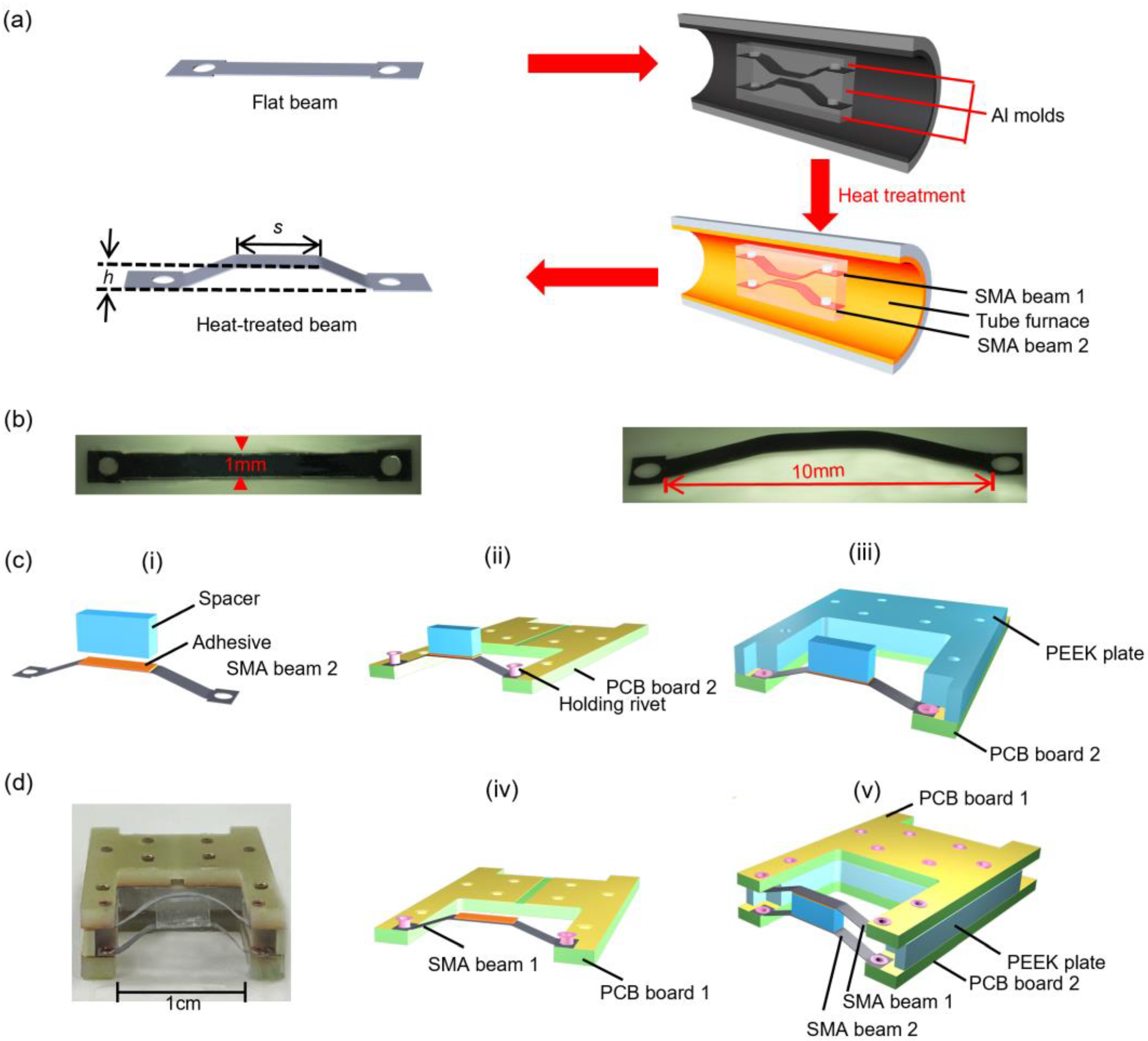
3. Actuator Design and Fabrication
4. Stationary Force–Displacement Characteristics
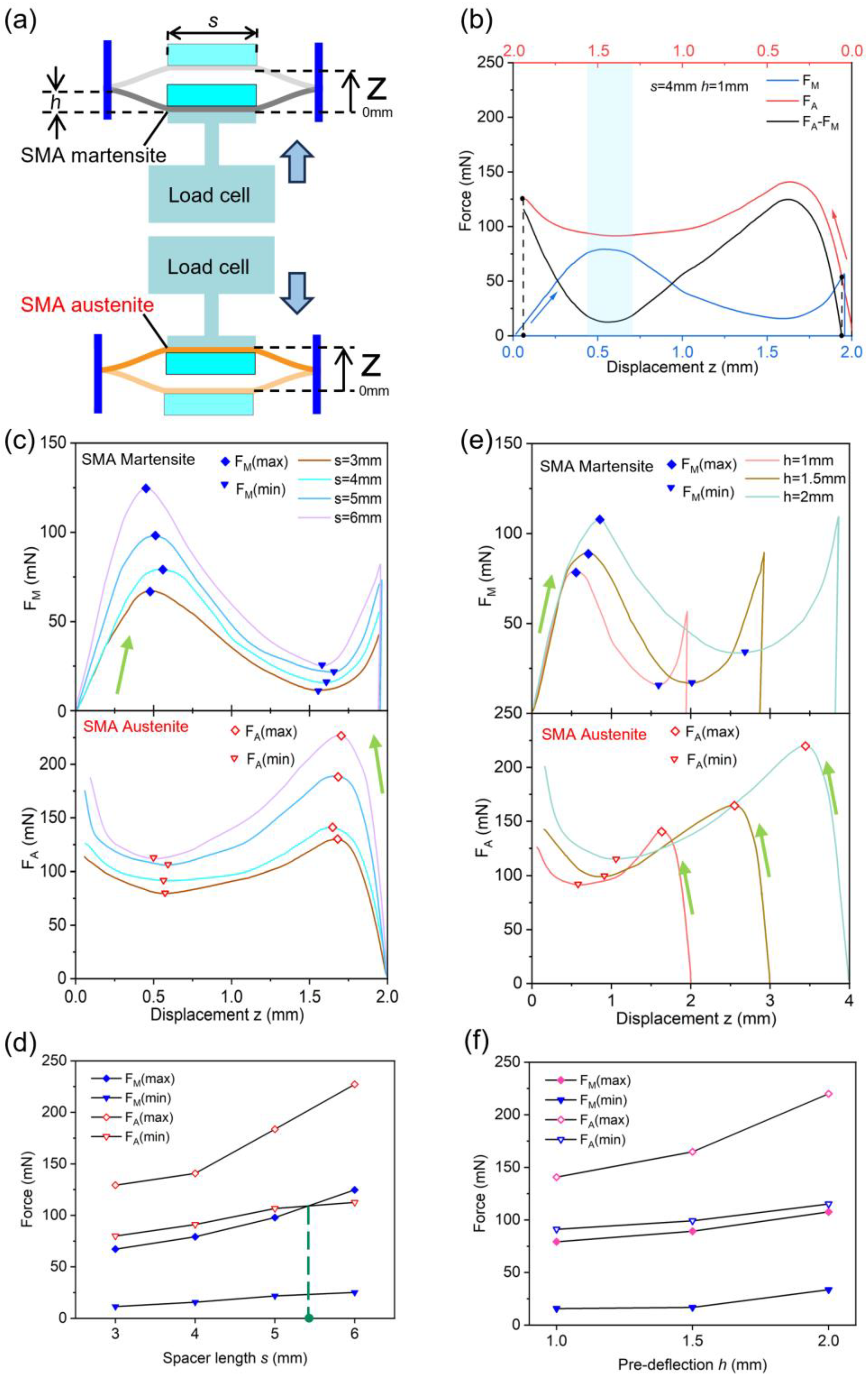
4.1. Monostable SMA Actuators
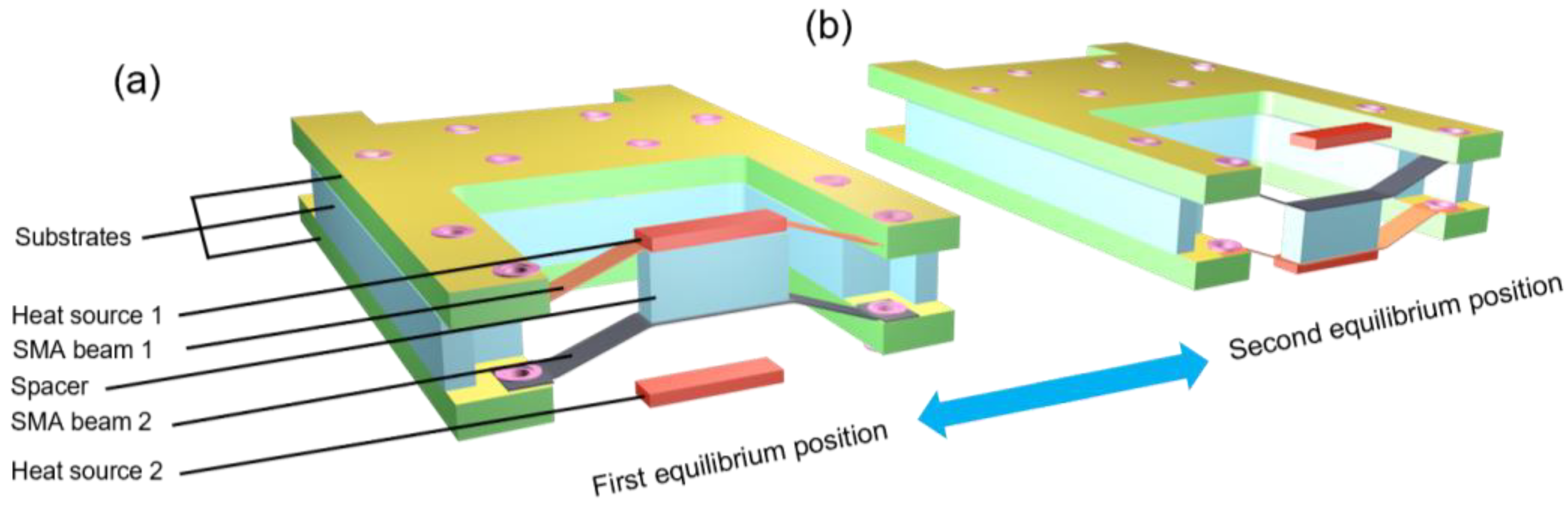
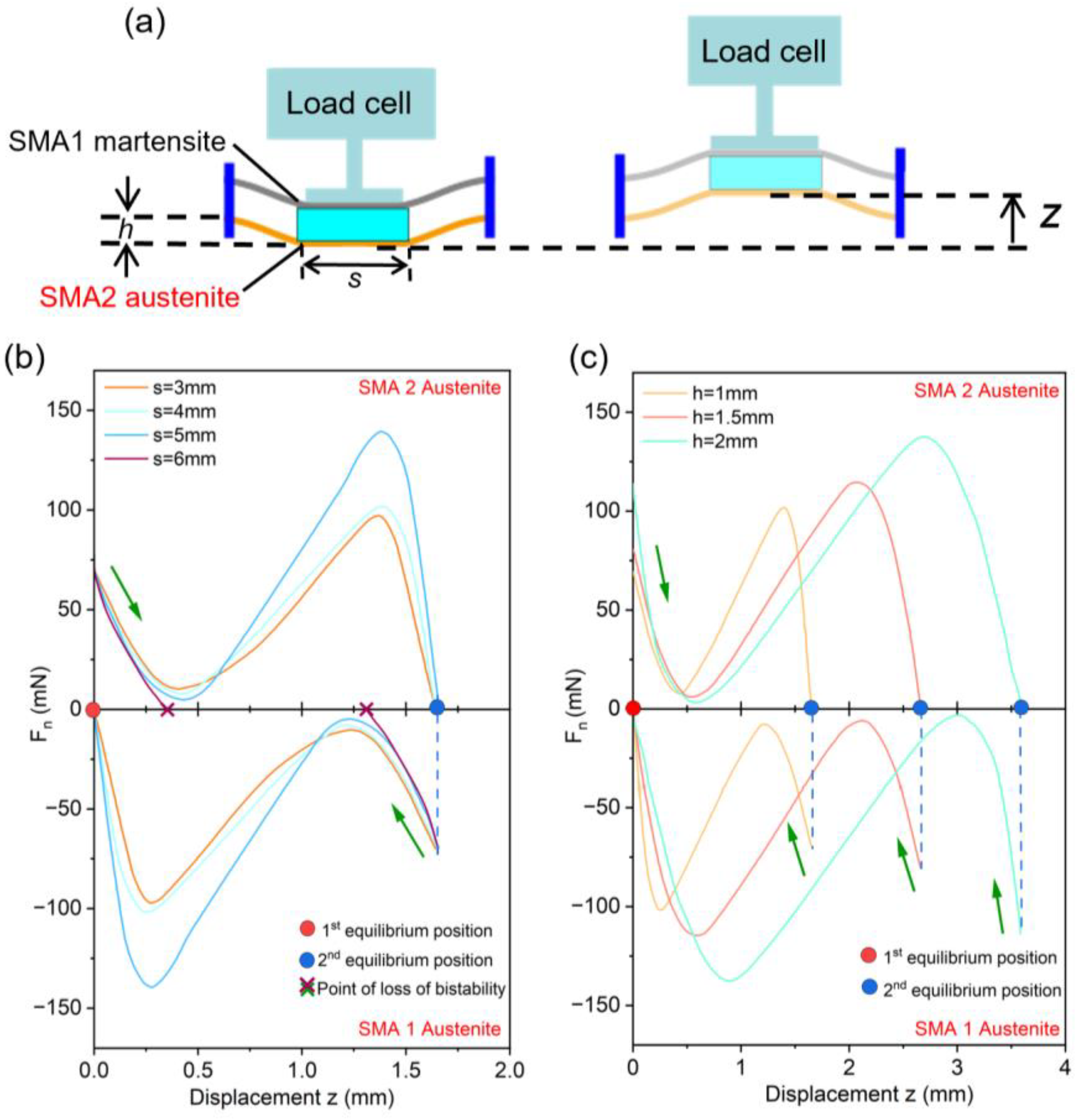
4.2. Bistable SMA Actuators
5. Dynamic Actuation Performance
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qiu, J.; Lang, J.H.; Slocum, A.H. A Curved-Beam Bistable Mechanism. J. Microelectromech. Syst. 2004, 13, 137–146. [Google Scholar] [CrossRef]
- Dorfmeister, M.; Schneider, M.; Schmid, U. Static and Dynamic Performance of Bistable MEMS Membranes. Sens. Actuators A Phys. 2018, 282, 259–268. [Google Scholar] [CrossRef]
- Wang, D.A.; Chen, J.H.; Pham, H.T. A Constant-Force Bistable Micromechanism. Sens. Actuators A Phys. 2013, 189, 481–487. [Google Scholar] [CrossRef]
- Hussein, H.; Younis, M.I. Analytical Study of the Snap-Through and Bistability of Beams with Arbitrarily Initial Shape. J. Mech. Robot. 2020, 12, 041001. [Google Scholar] [CrossRef]
- Megnin, C.; Barth, J.; Kohl, M. A Bistable SMA Microvalve for 3/2-Way Control. Sens. Actuators A Phys. 2012, 188, 285–291. [Google Scholar] [CrossRef]
- Kohl, M.; Seelecke, S.; Wallrabe, U. (Eds.) . Cooperative Microactuator Systems; MDPI: Basel, Switzerland, 2023. [Google Scholar]
- Howell, L.L.; Rao, S.S.; Midha, A. Reliability-Based Optimal Design of a Bistable Compliant Mechanism. J. Mech. Design 1994, 116, 1115–1121. [Google Scholar] [CrossRef]
- Tsay, J.; Su, L.Q.; Sung, C.K. Design of a Linear Micro-Feeding System Featuring Bistable Mechanisms. J. Micromech. Microeng. 2005, 15, 63–70. [Google Scholar] [CrossRef]
- Yang, B.; Wang, B.; Schomburg, W.K. A Thermopneumatically Actuated Bistable Microvalve. J. Micromech. Microeng. 2010, 20, 095024. [Google Scholar] [CrossRef]
- Taher, M.; Saif, A. On a Tunable Bistable MEMS-Theory and Experiment. J. Microelectromech. Syst. 2000, 9, 157. [Google Scholar]
- Baker, M.S.; Howell, L.L. On-Chip Actuation of an in-Plane Compliant Bistable Micromechanism. J. Microelectromech. Syst. 2002, 11, 566–573. [Google Scholar] [CrossRef]
- Masters, N.D.; Howell, L.L. A Self-Retracting Fully Compliant Bistable Micromechanism. J. Microelectromech. Syst. 2003, 12, 273–280. [Google Scholar] [CrossRef]
- Pieri, F.; Piotto, M. A Micromachined Bistable 1 x 2 Switch for Optical Fibers. Microelectron. Eng. 2000, 53, 561–564. [Google Scholar] [CrossRef]
- Chen, T.; Shea, K. An Autonomous Programmable Actuator and Shape Reconfigurable Structures Using Bistability and Shape Memory Polymers. 3D Print Addit. Manuf. 2018, 5, 91–101. [Google Scholar] [CrossRef]
- Jeong, H.Y.; Lee, E.; Ha, S.; Kim, N.; Jun, Y.C. Multistable Thermal Actuators Via Multimaterial 4D Printing. Adv. Mater. Technol. 2019, 4, 1800495. [Google Scholar] [CrossRef]
- Arrieta, A.F.; Van Gemmeren, V.; Anderson, A.J.; Weaver, P.M. Dynamics and Control of Twisting Bi-Stable Structures. Smart Mater. Struct. 2018, 27, 025006. [Google Scholar] [CrossRef]
- Giddings, P.F.; Kim, H.A.; Salo, A.I.T.; Bowen, C.R. Modelling of Piezoelectrically Actuated Bistable Composites. Mater. Lett. 2011, 65, 1261–1263. [Google Scholar] [CrossRef]
- Hamouche, W.; Maurini, C.; Vidoli, S.; Vincenti, A. Multi-Parameter Actuation of a Neutrally Stable Shell: A Flexible Gear-Less Motor. Proc. R. Soc. A Math. Phys. Eng. Sci. 2017, 473, 20170364. [Google Scholar] [CrossRef]
- Shao, H.; Wei, S.; Jiang, X.; Holmes, D.P.; Ghosh, T.K. Bioinspired Electrically Activated Soft Bistable Actuators. Adv. Funct. Mater. 2018, 28, 1802999. [Google Scholar] [CrossRef]
- Loukaides, E.G.; Smoukov, S.K.; Seffen, K.A. Magnetic Actuation and Transition Shapes of a Bistable Spherical Cap. Int. J. Smart Nano Mater. 2014, 5, 270–282. [Google Scholar] [CrossRef]
- Hou, X.; Liu, Y.; Wan, G.; Xu, Z.; Wen, C.; Yu, H.; Zhang, J.X.J.; Li, J.; Chen, Z. Magneto-Sensitive Bistable Soft Actuators: Experiments, Simulations, and Applications. Appl. Phys. Lett. 2018, 113, 221902. [Google Scholar] [CrossRef]
- Hussein, H.; Khan, F.; Younis, M.I. A Monolithic Tunable Symmetric Bistable Mechanism. Smart Mater. Struct. 2020, 29, 075033. [Google Scholar] [CrossRef]
- Kim, H.A.; Betts, D.N.; Salo, A.I.T.; Bowen, C.R. Shape Memory Alloy-Piezoelectric Active Structures for Reversible Actuation of Bistable Composites. AIAA J. 2010, 48, 1265–1268. [Google Scholar] [CrossRef]
- Kohl, M. Shape Memory Microactuators; Springer: Berlin/Heidelberg, Germany, 2010; ISBN 3-540-20635-3. [Google Scholar]
- Kohl, M.; Ossmer, H.; Gueltig, M.; Megnin, C. SMA Foils for MEMS: From Material Properties to the Engineering of Microdevices. Shape Mem. Superelasticity 2018, 4, 127–142. [Google Scholar] [CrossRef]
- Firouzeh, A.; Paik, J. Robogami: A Fully Integrated Low-Profile Robotic Origami. J. Mech. Robot. 2015, 7, 021009. [Google Scholar] [CrossRef]
- Chen, X.; Bumke, L.; Quandt, E.; Kohl, M. A Thermal Energy Harvester Based on Bistable SMA Microactuation. In Proceedings of the ACTUATOR 2022, Mannheim, Germany, 29–30 June 2022. [Google Scholar]
- Gu, H.; Bumke, L.; Chluba, C.; Quandt, E.; James, R.D. Phase Engineering and Supercompatibility of Shape Memory Alloys. Mater. Today 2018, 21, 265–277. [Google Scholar] [CrossRef]
- De Miranda, R.L.; Zamponi, C.; Quandt, E. Micropatterned Freestanding Superelastic TiNi Films. Adv. Eng. Mater. 2013, 15, 66–69. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Bumke, L.; Quandt, E.; Kohl, M. Bistable Actuation Based on Antagonistic Buckling SMA Beams. Actuators 2023, 12, 422. https://doi.org/10.3390/act12110422
Chen X, Bumke L, Quandt E, Kohl M. Bistable Actuation Based on Antagonistic Buckling SMA Beams. Actuators. 2023; 12(11):422. https://doi.org/10.3390/act12110422
Chicago/Turabian StyleChen, Xi, Lars Bumke, Eckhard Quandt, and Manfred Kohl. 2023. "Bistable Actuation Based on Antagonistic Buckling SMA Beams" Actuators 12, no. 11: 422. https://doi.org/10.3390/act12110422
APA StyleChen, X., Bumke, L., Quandt, E., & Kohl, M. (2023). Bistable Actuation Based on Antagonistic Buckling SMA Beams. Actuators, 12(11), 422. https://doi.org/10.3390/act12110422