
Binary Controller Based on the Electrical Activity Related to Head Yaw Rotation



Abstract
:1. Introduction
2. Methods
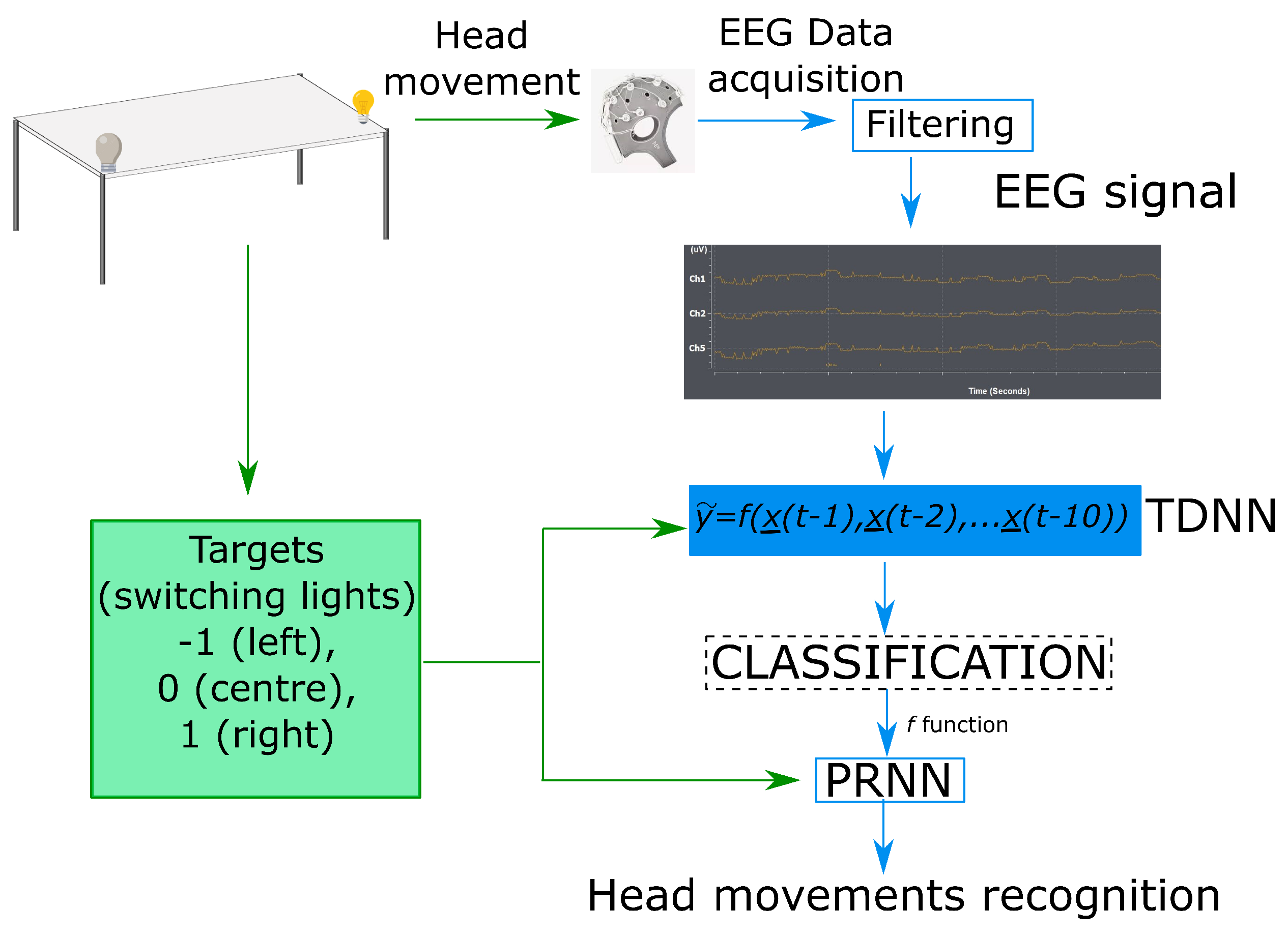
2.1. System Architecture
2.1.1. Lamp System
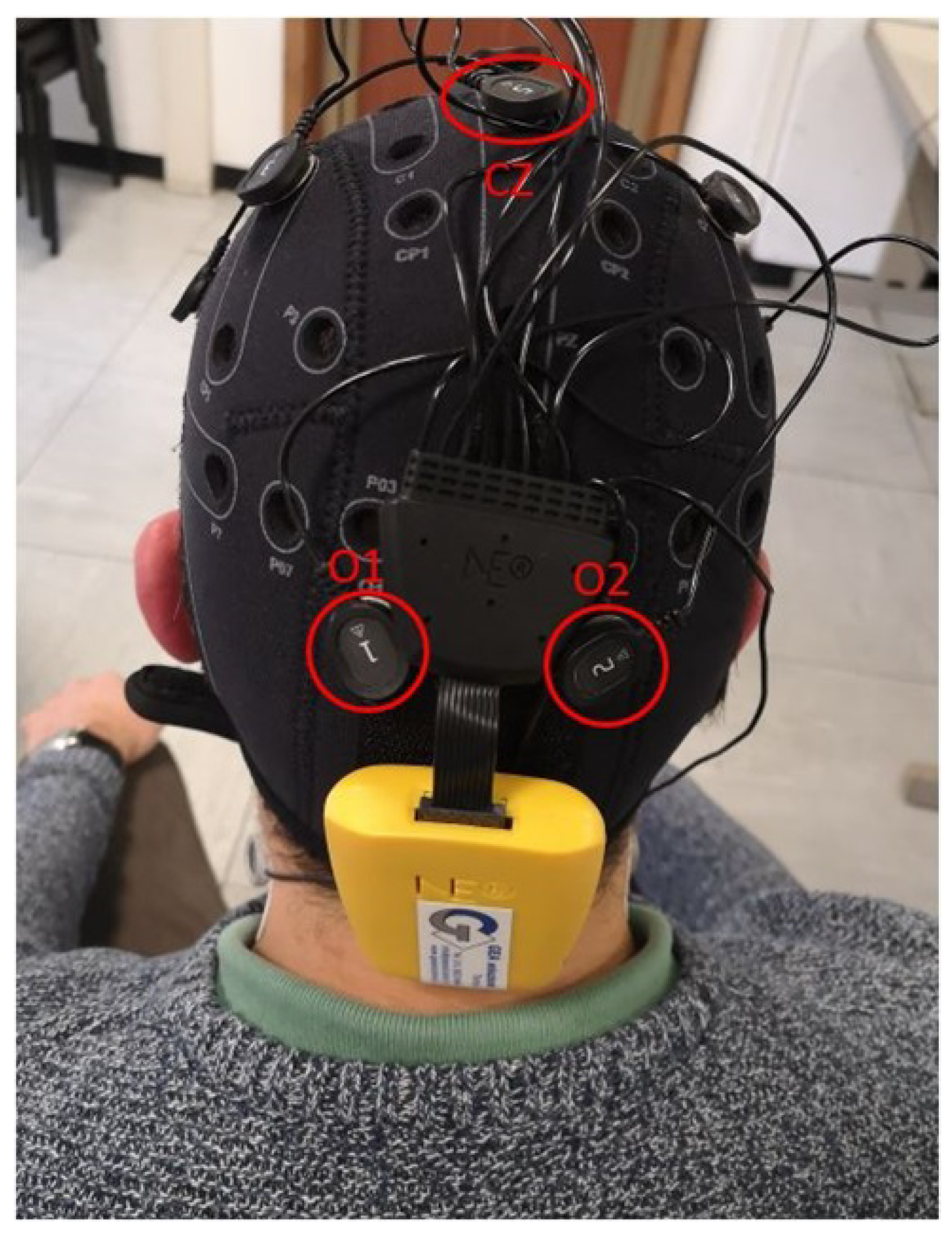
2.1.2. Enobio Cap
2.2. Experimental Set-Up
2.3. Data Acquisition Protocol
2.4. Data Processing Analysis
Preprocessing Data
2.5. Input–Output Function Identification
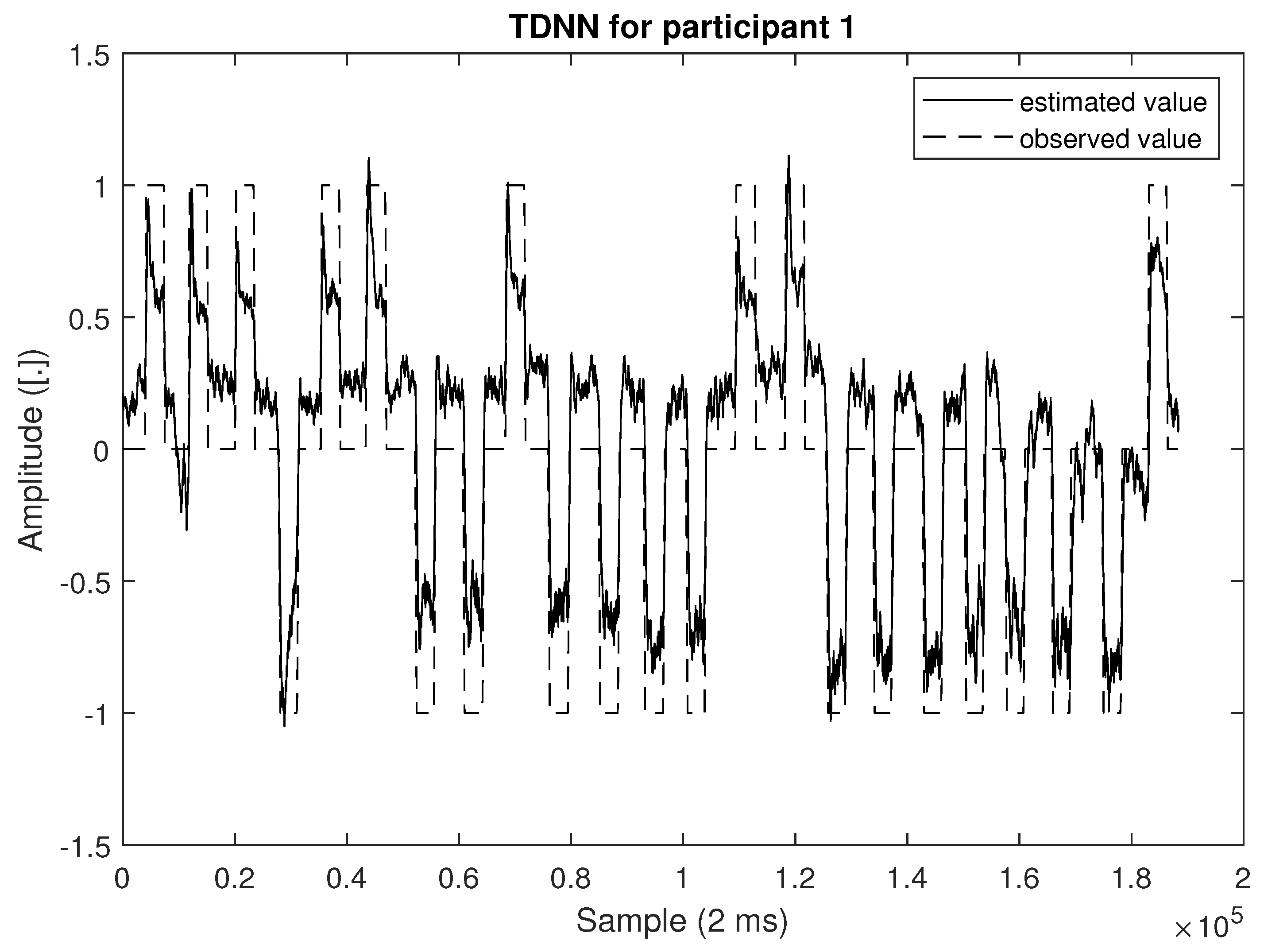
2.5.1. The Time Delay Neural Network (TDNN)
- are the standard deviations of y and ;
- is the covariance of y and .
2.5.2. The Pattern Recognition Neural Network (PRNN)
2.6. Binary Controller Testing in Real-Time
3. Results
3.1. Prediction Accuracy
3.2. Binary Controller Performance
4. Conclusions and Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sharit, J. A Human Factors Engineering Perspective to Aging and Work. In Current and Emerging Trends in Aging and Work; Springer: Berlin/Heidelberg, Germany, 2020; pp. 191–218. [Google Scholar]
- Zhang, J.; Yin, Z.; Wang, R. Recognition of mental workload levels under complex human–machine collaboration by using physiological features and adaptive support vector machines. IEEE Trans. Hum.-Mach. Syst. 2014, 45, 200–214. [Google Scholar] [CrossRef]
- Tan, D.; Nijholt, A. Brain-computer interfaces and human-computer interaction. In Brain-Computer Interfaces; Springer: Berlin/Heidelberg, Germany, 2010; pp. 3–19. [Google Scholar]
- Stegman, P.; Crawford, C.S.; Andujar, M.; Nijholt, A.; Gilbert, J.E. Brain–computer interface software: A review and discussion. IEEE Trans. Hum.-Mach. Syst. 2020, 50, 101–115. [Google Scholar] [CrossRef]
- Yang, S.; Deravi, F. On the usability of electroencephalographic signals for biometric recognition: A survey. IEEE Trans. Hum.-Mach. Syst. 2017, 47, 958–969. [Google Scholar] [CrossRef] [Green Version]
- Sakkalis, V. Review of advanced techniques for the estimation of brain connectivity measured with EEG/MEG. Comput. Biol. Med. 2011, 41, 1110–1117. [Google Scholar] [CrossRef] [PubMed]
- Zhong, P.; Wang, D.; Miao, C. EEG-based emotion recognition using regularized graph neural networks. IEEE Trans. Affect. Comput. 2020. [Google Scholar] [CrossRef]
- Monteiro, T.G.; Skourup, C.; Zhang, H. Using EEG for mental fatigue assessment: A comprehensive look into the current state of the art. IEEE Trans. Hum.-Mach. Syst. 2019, 49, 599–610. [Google Scholar] [CrossRef] [Green Version]
- Supriya, S.; Siuly, S.; Wang, H.; Zhang, Y. EEG sleep stages analysis and classification based on weighed complex network features. IEEE Trans. Emerg. Top. Comput. Intell. 2018, 5, 236–246. [Google Scholar] [CrossRef]
- Wang, S.; Gwizdka, J.; Chaovalitwongse, W.A. Using wireless EEG signals to assess memory workload in the n-back task. IEEE Trans. Hum.-Mach. Syst. 2015, 46, 424–435. [Google Scholar] [CrossRef]
- Yu, H.; Zhu, L.; Cai, L.; Wang, J.; Liu, C.; Shi, N.; Liu, J. Variation of functional brain connectivity in epileptic seizures: An EEG analysis with cross-frequency phase synchronization. Cogn. Neurodyn. 2020, 14, 35–49. [Google Scholar] [CrossRef]
- Ghosh, L.; Konar, A.; Rakshit, P.; Nagar, A.K. Mimicking short-term memory in shape-reconstruction task using an EEG-induced type-2 fuzzy deep brain learning network. IEEE Trans. Emerg. Top. Comput. Intell. 2019, 4, 571–588. [Google Scholar] [CrossRef]
- Acharya, U.R.; Sree, S.V.; Swapna, G.; Martis, R.J.; Suri, J.S. Automated EEG analysis of epilepsy: A review. Knowl.-Based Syst. 2013, 45, 147–165. [Google Scholar] [CrossRef]
- Zhang, C.; Eskandarian, A. A survey and tutorial of EEG-based brain monitoring for driver state analysis. arXiv 2020, arXiv:2008.11226. [Google Scholar] [CrossRef]
- He, D.; Donmez, B.; Liu, C.C.; Plataniotis, K.N. High cognitive load assessment in drivers through wireless electroencephalography and the validation of a modified n-back task. IEEE Trans. Hum.-Mach. Syst. 2019, 49, 362–371. [Google Scholar] [CrossRef]
- Ming, Y.; Wu, D.; Wang, Y.K.; Shi, Y.; Lin, C.T. EEG-based drowsiness estimation for driving safety using deep Q-learning. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 5, 583–594. [Google Scholar] [CrossRef]
- Li, G.; Chung, W.Y. Combined EEG-gyroscope-tDCS brain machine interface system for early management of driver drowsiness. IEEE Trans. Hum.-Mach. Syst. 2017, 48, 50–62. [Google Scholar] [CrossRef]
- Reddy, T.K.; Arora, V.; Kumar, S.; Behera, L.; Wang, Y.K.; Lin, C.T. Electroencephalogram based reaction time prediction with differential phase synchrony representations using co-operative multi-task deep neural networks. IEEE Trans. Emerg. Top. Comput. Intell. 2019, 3, 369–379. [Google Scholar] [CrossRef]
- Zero, E.; Bersani, C.; Zero, L.; Sacile, R. Towards real-time monitoring of fear in driving sessions. IFAC-PapersOnLine 2019, 52, 299–304. [Google Scholar] [CrossRef]
- Graffione, S.; Bersani, C.; Sacile, R.; Zero, E. Model predictive control of a vehicle platoon. In Proceedings of the 2020 IEEE 15th International Conference of System of Systems Engineering (SoSE), Budapest, Hungary, 2–4 June 2020; pp. 513–518. [Google Scholar]
- Chavarriaga, R.; Ušćumlić, M.; Zhang, H.; Khaliliardali, Z.; Aydarkhanov, R.; Saeedi, S.; Gheorghe, L.; Millán, J.d.R. Decoding neural correlates of cognitive states to enhance driving experience. IEEE Trans. Emerg. Top. Comput. Intell. 2018, 2, 288–297. [Google Scholar] [CrossRef] [Green Version]
- Zero, E.; Graffione, S.; Bersani, C.; Sacile, R. A BCI driving system to understand brain signals related to steering. In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics, ICINCO 2021, Online streaming, 6–8 July 2021; pp. 745–751. [Google Scholar]
- Nourmohammadi, A.; Jafari, M.; Zander, T.O. A survey on unmanned aerial vehicle remote control using brain–computer interface. IEEE Trans. Hum.-Mach. Syst. 2018, 48, 337–348. [Google Scholar] [CrossRef]
- Abiri, R.; Borhani, S.; Sellers, E.W.; Jiang, Y.; Zhao, X. A comprehensive review of EEG-based brain–computer interface paradigms. J. Neural Eng. 2019, 16, 011001. [Google Scholar] [CrossRef]
- Wolpaw, J.R.; Birbaumer, N.; McFarland, D.J.; Pfurtscheller, G.; Vaughan, T.M. Brain–computer interfaces for communication and control. Clin. Neurophysiol. 2002, 113, 767–791. [Google Scholar] [CrossRef]
- Gupta, G.S.; Dave, G.B.; Tripathi, P.R.; Mohanta, D.K.; Ghosh, S.; Sinha, R.K. Brain computer interface controlled automatic electric drive for neuro-aid system. Biomed. Signal Process. Control 2021, 63, 102175. [Google Scholar] [CrossRef]
- Nataraj, S.K.; Paulraj, M.P.; Yaacob, S.B.; Adom, A.H.B. Classification of thought evoked potentials for navigation and communication using multilayer neural network. J. Chin. Inst. Eng. 2021, 44, 53–63. [Google Scholar] [CrossRef]
- Tsui, C.S.L.; Gan, J.Q.; Hu, H. A self-paced motor imagery based brain-computer interface for robotic wheelchair control. Clin. EEG Neurosci. 2011, 42, 225–229. [Google Scholar] [CrossRef] [PubMed]
- Holm, N.S.; Puthusserypady, S. An improved five class MI based BCI scheme for drone control using filter bank CSP. In Proceedings of the 2019 7th International Winter Conference on Brain-Computer Interface (BCI), Gangwon, Korea, 18–20 February 2019; pp. 1–6. [Google Scholar]
- Meng, J.; Zhang, S.; Bekyo, A.; Olsoe, J.; Baxter, B.; He, B. Noninvasive electroencephalogram based control of a robotic arm for reach and grasp tasks. Sci. Rep. 2016, 6, 38565. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rakshit, A.; Konar, A.; Nagar, A.K. A hybrid brain-computer interface for closed-loop position control of a robot arm. IEEE/CAA J. Autom. Sin. 2020, 7, 1344–1360. [Google Scholar] [CrossRef]
- Zhao, Q.; Zhang, L.; Cichocki, A. EEG-based asynchronous BCI control of a car in 3D virtual reality environments. Chin. Sci. Bull. 2009, 54, 78–87. [Google Scholar] [CrossRef]
- Brumberg, J.S.; Nieto-Castanon, A.; Kennedy, P.R.; Guenther, F.H. Brain–computer interfaces for speech communication. Speech Commun. 2010, 52, 367–379. [Google Scholar] [CrossRef] [Green Version]
- Lotte, F.; Congedo, M.; Lécuyer, A.; Lamarche, F.; Arnaldi, B. A review of classification algorithms for EEG-based brain–computer interfaces. J. Neural Eng. 2007, 4, R1. [Google Scholar] [CrossRef]
- Garrett, D.; Peterson, D.A.; Anderson, C.W.; Thaut, M.H. Comparison of linear, nonlinear, and feature selection methods for EEG signal classification. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 141–144. [Google Scholar] [CrossRef]
- Saha, A.; Konar, A.; Chatterjee, A.; Ralescu, A.; Nagar, A.K. EEG analysis for olfactory perceptual-ability measurement using a recurrent neural classifier. IEEE Trans. Hum.-Mach. Syst. 2014, 44, 717–730. [Google Scholar] [CrossRef]
- Jiang, J.; Fares, A.; Zhong, S.H. A context-supported deep learning framework for multimodal brain imaging classification. IEEE Trans. Hum.-Mach. Syst. 2019, 49, 611–622. [Google Scholar] [CrossRef]
- Müller, V.; Lutzenberger, W.; Preißl, H.; Pulvermüller, F.; Birbaumer, N. Complexity of visual stimuli and non-linear EEG dynamics in humans. Cogn. Brain Res. 2003, 16, 104–110. [Google Scholar] [CrossRef]
- Reddy, T.K.; Arora, V.; Behera, L. HJB-equation-based optimal learning scheme for neural networks with applications in brain–computer interface. IEEE Trans. Emerg. Top. Comput. Intell. 2018, 4, 159–170. [Google Scholar] [CrossRef]
- Saha, A.; Konar, A.; Nagar, A.K. EEG analysis for cognitive failure detection in driving using type-2 fuzzy classifiers. IEEE Trans. Emerg. Top. Comput. Intell. 2017, 1, 437–453. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Fu, Y.; Yang, J.; Xiong, X.; Sun, H.; Yu, Z. Discrimination of motor imagery patterns by electroencephalogram phase synchronization combined with frequency band energy. IEEE/CAA J. Autom. Sin. 2016, 4, 551–557. [Google Scholar] [CrossRef]
- Athanasiou, A.; Chatzitheodorou, E.; Kalogianni, K.; Lithari, C.; Moulos, I.; Bamidis, P. Comparing sensorimotor cortex activation during actual and imaginary movement. In Proceedings of the XII Mediterranean Conference on Medical and Biological Engineering and Computing 2010, Chalkidiki, Greece, 27–30 May 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 111–114. [Google Scholar]
- Chaisaen, R.; Autthasan, P.; Mingchinda, N.; Leelaarporn, P.; Kunaseth, N.; Tammajarung, S.; Manoonpong, P.; Mukhopadhyay, S.C.; Wilaiprasitporn, T. Decoding EEG rhythms during action observation, motor imagery, and execution for standing and sitting. IEEE Sens. J. 2020, 20, 13776–13786. [Google Scholar] [CrossRef]
- Al-dabag, M.L.; Ozkurt, N. EEG motor movement classification based on cross-correlation with effective channel. Signal Image Video Process. 2019, 13, 567–573. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Khasnobish, A.; Konar, A.; Tibarewala, D.; Nagar, A.K. Performance analysis of left/right hand movement classification from EEG signal by intelligent algorithms. In Proceedings of the 2011 IEEE Symposium on Computational Intelligence, Cognitive Algorithms, Mind, and Brain (CCMB), Paris, France, 11–15 April 2011; pp. 1–8. [Google Scholar]
- Abiri, R.; Borhani, S.; Kilmarx, J.; Esterwood, C.; Jiang, Y.; Zhao, X. A usability study of low-cost wireless brain-computer interface for cursor control using online linear model. IEEE Trans. Hum.-Mach. Syst. 2020, 50, 287–297. [Google Scholar] [CrossRef]
- Zero, E.; Bersani, C.; Sacile, R. EEG Based BCI System for Driver’s Arm Movements Identification. Proc. Autom. Robot. Commun. Ind. 4.0 2021, 77. [Google Scholar]
- O’Regan, S.; Marnane, W. Multimodal detection of head-movement artefacts in EEG. J. Neurosci. Methods 2013, 218, 110–120. [Google Scholar] [CrossRef] [PubMed]
- Uke, N.; Kulkarni, D. Recent Artifacts Handling Algorithms in Electroencephalogram. 2020. Available online: https://www.academia.edu/43232803/Recent_Artifacts_Handling_Algorithms_in_Electroencephalogram?from=cover_page (accessed on 1 January 2020).
- Jiang, X.; Bian, G.B.; Tian, Z. Removal of artifacts from EEG signals: A review. Sensors 2019, 19, 987. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- O’Regan, S.; Faul, S.; Marnane, W. Automatic detection of EEG artefacts arising from head movements using EEG and gyroscope signals. Med. Eng. Phys. 2013, 35, 867–874. [Google Scholar] [CrossRef] [PubMed]
- Lawhern, V.; Hairston, W.D.; McDowell, K.; Westerfield, M.; Robbins, K. Detection and classification of subject-generated artifacts in EEG signals using autoregressive models. J. Neurosci. Methods 2012, 208, 181–189. [Google Scholar] [CrossRef] [Green Version]
- Chadwick, N.A.; McMeekin, D.A.; Tan, T. Classifying eye and head movement artifacts in EEG signals. In Proceedings of the 5th IEEE International Conference on Digital Ecosystems and Technologies (IEEE DEST 2011), Daejeon, Korea, 31 May–3 June 2011; pp. 285–291. [Google Scholar]
- Wang, M.; Abdelfattah, S.; Moustafa, N.; Hu, J. Deep Gaussian mixture-hidden Markov model for classification of EEG signals. IEEE Trans. Emerg. Top. Comput. Intell. 2018, 2, 278–287. [Google Scholar] [CrossRef]
- Goh, S.K.; Abbass, H.A.; Tan, K.C.; Al-Mamun, A.; Wang, C.; Guan, C. Automatic EEG artifact removal techniques by detecting influential independent components. IEEE Trans. Emerg. Top. Comput. Intell. 2017, 1, 270–279. [Google Scholar] [CrossRef]
- Kim, C.S.; Sun, J.; Liu, D.; Wang, Q.; Paek, S.G. Removal of ocular artifacts using ICA and adaptive filter for motor imagery-based BCI. IEEE/CAA J. Autom. Sin. 2017, 1–8. [Google Scholar] [CrossRef]
- Daly, I.; Billinger, M.; Scherer, R.; Müller-Putz, G. On the automated removal of artifacts related to head movement from the EEG. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 427–434. [Google Scholar] [CrossRef]
- Li, B.J.; Bailenson, J.N.; Pines, A.; Greenleaf, W.J.; Williams, L.M. A public database of immersive VR videos with corresponding ratings of arousal, valence, and correlations between head movements and self report measures. Front. Psychol. 2017, 8, 2116. [Google Scholar] [CrossRef]
- Zero, E.; Bersani, C.; Sacile, R. Identification of Brain Electrical Activity Related to Head Yaw Rotations. Sensors 2021, 21, 3345. [Google Scholar] [CrossRef]
- Mak, J.N.; Chan, R.H.; Wong, S.W. Evaluation of mental workload in visual-motor task: Spectral analysis of single-channel frontal EEG. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 8426–8430. [Google Scholar]
- Rilk, A.J.; Soekadar, S.R.; Sauseng, P.; Plewnia, C. Alpha coherence predicts accuracy during a visuomotor tracking task. Neuropsychologia 2011, 49, 3704–3709. [Google Scholar] [CrossRef] [PubMed]
- Enobio® EEG Systems. Available online: https://www.neuroelectrics.com/solutions/enobio (accessed on 1 January 2020).
- Singh, V.; Veer, K.; Sharma, R.; Kumar, S. Comparative study of FIR and IIR filters for the removal of 50 Hz noise from EEG signal. Int. J. Biomed. Eng. Technol. 2016, 22, 250–257. [Google Scholar] [CrossRef]
- Sapna, S.; Tamilarasi, A.; Kumar, M.P. Backpropagation learning algorithm based on Levenberg Marquardt Algorithm. Comp. Sci. Inf. Technol. (CS IT) 2012, 2, 393–398. [Google Scholar]
- Lv, C.; Xing, Y.; Zhang, J.; Na, X.; Li, Y.; Liu, T.; Cao, D.; Wang, F.Y. Levenberg–Marquardt backpropagation training of multilayer neural networks for state estimation of a safety-critical cyber-physical system. IEEE Trans. Ind. Inform. 2017, 14, 3436–3446. [Google Scholar] [CrossRef] [Green Version]
- Feng, D.; Chen, L.; Chen, P. Intention Recognition of Upper Limb Movement on Electroencephalogram Signal Based on CSP-CNN. In Proceedings of the 2021 5th International Conference on Robotics and Automation Sciences (ICRAS), Wuhan, China, 11–13 June 2021; pp. 267–271. [Google Scholar]
- Boughorbel, S.; Jarray, F.; El-Anbari, M. Optimal classifier for imbalanced data using Matthews Correlation Coefficient metric. PLoS ONE 2017, 12, e0177678. [Google Scholar] [CrossRef]
- Pravitha Ramanand, M.C.B.; Bruce, E.N. Mutual information analysis of EEG signals indicates age-related changes in cortical interdependence during sleep in middle-aged vs. elderly women. J. Clin. Neurophysiol. Off. Publ. Am. Electroencephalogr. Soc. 2010, 27, 274. [Google Scholar]
- Cohen, L.H. Life Events and Psychological Functioning: Theoretical and Methodological Issues; SAGE Publications, Incorporated: Thousand Oaks, CA, USA, 1988; Volume 90. [Google Scholar]
- Tawari, A.; Martin, S.; Trivedi, M.M. Continuous head movement estimator for driver assistance: Issues, algorithms, and on-road evaluations. IEEE Trans. Intell. Transp. Syst. 2014, 15, 818–830. [Google Scholar] [CrossRef] [Green Version]
- Izzuddin, T.A.; Ariffin, M.; Bohari, Z.H.; Ghazali, R.; Jali, M.H. Movement intention detection using neural network for quadriplegic assistive machine. In Proceedings of the 2015 IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 27–29 November 2015; pp. 275–280. [Google Scholar]
- Antoniou, E.; Bozios, P.; Christou, V.; Tzimourta, K.D.; Kalafatakis, K.; G Tsipouras, M.; Giannakeas, N.; Tzallas, A.T. EEG-based eye movement recognition using brain–computer interface and random forests. Sensors 2021, 21, 2339. [Google Scholar] [CrossRef]
- Rudigkeit, N.; Gebhard, M. AMiCUS—A head motion-based interface for control of an assistive robot. Sensors 2019, 19, 2836. [Google Scholar] [CrossRef] [Green Version]
- Nagua, L.; Munoz, J.; Monje, C.A.; Balaguer, C. A first approach to a proposal of a soft robotic link acting as a neck. In Proceedings of the XXXIX Jornadas de Automática. Área de Ingeniería de Sistemas y Automática, Universidad de Extremadura, Badajoz, Spain, 5–7 September 2018; pp. 522–529. [Google Scholar]
- Nagua, L.; Monje, C.; Yañez-Barnuevo, J.M.; Balaguer, C. Design and performance validation of a cable-driven soft robotic neck. In Proceedings of the Actas de las Jornadas Nacionales de Robtica, Valladolid, Spain, 14–15 June 2018; pp. 1–5. [Google Scholar]
- Quevedo, F.; Muñoz, J.; Castano Pena, J.A.; Monje, C.A. 3D Model Identification of a Soft Robotic Neck. Mathematics 2021, 9, 1652. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Konar, A.; Tibarewala, D. Motor imagery and error related potential induced position control of a robotic arm. IEEE/CAA J. Autom. Sin. 2017, 4, 639–650. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Solis-Escalante, T. Could the beta rebound in the EEG be suitable to realize a “brain switch”? Clin. Neurophysiol. 2009, 120, 24–29. [Google Scholar] [CrossRef] [PubMed]
- Mason, S.G.; Birch, G.E. A brain-controlled switch for asynchronous control applications. IEEE Trans. Biomed. Eng. 2000, 47, 1297–1307. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, S.; Zhang, R.; Wang, Q.; Chen, Y.; Yang, T.; Feng, Z.; Zhang, Y.; Shao, M.; Li, Y. A P300-based threshold-free brain switch and its application in wheelchair control. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 715–725. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part. ID | |||
|---|---|---|---|
| P1 | 0.1440 | 0.1442 | 0.0475 |
| P2 | 0.1488 | 0.1668 | 0.1359 |
| P3 | 0.2149 | 0.2180 | 0.1725 |
| P4 | 0.0975 | 0.0688 | 0.0632 |
| P5 | 0.1093 | 0.1126 | 0.1049 |
| P6 | 0.0951 | 0.1573 | 0.1438 |
| P7 | 0.1020 | 0.1036 | 0.0496 |
| P8 | 0.0953 | 0.1246 | 0.1404 |
| P9 | 0.1673 | 0.0740 | 0.0833 |
| P10 | 0.1164 | 0.1443 | 0.1385 |
| P11 | 0.1172 | 0.1321 | 0.1065 |
| P12 | 0.0775 | 0.1652 | 0.1610 |
| P13 | 0.0745 | 0.1825 | 0.0660 |
| P14 | 0.1314 | 0.1120 | 0.1308 |
| P15 | 0.1401 | 0.1729 | 0.0888 |
| P16 | 0.2235 | 0.1935 | 0.1799 |
| P17 | 0.0929 | 0.1388 | 0.1003 |
| P18 | 0.1014 | 0.1113 | 0.1116 |
| P19 | 0.0718 | 0.0962 | 0.0901 |
| P20 | 0.2314 | 0.2534 | 0.1334 |
| P21 | 0.1052 | 0.0826 | 0.0649 |
| P22 | 0.2754 | 0.1999 | 0.2961 |
| Part. ID | r | MSE |
|---|---|---|
| P1 | 0.89 | 0.177 |
| P2 | 0.78 | 0.335 |
| P3 | 0.76 | 0.719 |
| P4 | 0.90 | 0.468 |
| P5 | 0.79 | 0.522 |
| P6 | 0.85 | 0.560 |
| P7 | 0.64 | 0.575 |
| P8 | 0.65 | 0.636 |
| P9 | 0.72 | 0.523 |
| P10 | 0.92 | 0.224 |
| P11 | 0.91 | 0.322 |
| P12 | 0.91 | 0.225 |
| P13 | 0.87 | 0.441 |
| P14 | 0.59 | 1.047 |
| P15 | 0.81 | 0.249 |
| P16 | 0.78 | 0.411 |
| P17 | 0.84 | 0.514 |
| P18 | 0.61 | 0.598 |
| P19 | 0.64 | 0.530 |
| P20 | 0.90 | 0.451 |
| P21 | 0.69 | 0.862 |
| P22 | 0.87 | 0.316 |
| Part. ID | % Correct Prediction | H |
|---|---|---|
| P1 | 96.85 | 0.1814 |
| P2 | 90.55 | 0.2862 |
| P3 | 89.75 | 0.4447 |
| P4 | 93.08 | 0.2410 |
| P5 | 82.93 | 0.4559 |
| P6 | 90.21 | 0.3247 |
| P7 | 78.85 | 0.6257 |
| P8 | 83.64 | 0.4802 |
| P9 | 83.64 | 0.4659 |
| P10 | 94.72 | 0.1634 |
| P11 | 93.88 | 0.1911 |
| P12 | 93.04 | 0.1979 |
| P13 | 91.67 | 0.3069 |
| P14 | 81.82 | 0.5116 |
| P15 | 91.92 | 0.2960 |
| P16 | 90.55 | 0.3124 |
| P17 | 85.48 | 0.3701 |
| P18 | 74.19 | 0.6751 |
| P19 | 79.21 | 0.5458 |
| P20 | 93.36 | 0.1932 |
| P21 | 79.83 | 0.5567 |
| P22 | 95.82 | 0.2127 |
| Actual Class/ Predicted Class | −1 | 0 | 1 | Total |
|---|---|---|---|---|
| −1 | 38 | 3 | 0 | 41 |
| 0 | 3 | 163 | 1 | 167 |
| 1 | 0 | 4 | 51 | 55 |
| Total | 41 | 170 | 52 | 263 |
| Actual Class/ Predicted Class | −1 | 0 | 1 | Total |
|---|---|---|---|---|
| −1 | 759 | 148 | 1 | 908 |
| 0 | 272 | 3200 | 212 | 3684 |
| 1 | 0 | 137 | 899 | 1036 |
| Total | 1031 | 3485 | 1112 | 5628 |
| Part. ID | % of Correct Control with Open Eyes | % of Correct Control by Closed Eyes |
|---|---|---|
| P1 | 100 | 100 |
| P2 | 86 | 83 |
| P3 | 80 | 63 |
| P4 | 82 | 80 |
| P5 | 79 | 44 |
| P6 | 91 | 68 |
| P7 | 85 | 79 |
| P8 | 81 | 79 |
| P9 | 77 | 73 |
| P10 | 100 | 96 |
| P11 | 87 | 90 |
| P12 | 96 | 96 |
| P13 | 76 | 73 |
| P14 | 54 | 26 |
| P15 | 94 | 88 |
| P16 | 88 | 86 |
| P17 | 88 | 73 |
| P18 | 81 | 59 |
| P19 | 78 | 68 |
| P20 | 97 | 87 |
| P21 | 78 | 71 |
| P22 | 81 | 62 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zero, E.; Bersani, C.; Sacile, R. Binary Controller Based on the Electrical Activity Related to Head Yaw Rotation. Actuators 2022, 11, 161. https://doi.org/10.3390/act11060161
Zero E, Bersani C, Sacile R. Binary Controller Based on the Electrical Activity Related to Head Yaw Rotation. Actuators. 2022; 11(6):161. https://doi.org/10.3390/act11060161
Chicago/Turabian StyleZero, Enrico, Chiara Bersani, and Roberto Sacile. 2022. "Binary Controller Based on the Electrical Activity Related to Head Yaw Rotation" Actuators 11, no. 6: 161. https://doi.org/10.3390/act11060161
APA StyleZero, E., Bersani, C., & Sacile, R. (2022). Binary Controller Based on the Electrical Activity Related to Head Yaw Rotation. Actuators, 11(6), 161. https://doi.org/10.3390/act11060161