1. Introduction
Autonomous vehicles can drive based on the perception of surrounding environmental conditions, just like human drivers [
1]. In recent years, research on autonomous driving has become a hot spot. Advanced Driving Assistant System (ADAS) has developed rapidly, and some technologies have been applied in mass production [
2]. The autonomous driving system contains a wide range of technologies, including multi-sensor fusion technology, signal processing technology, communication technology and artificial intelligence technology [
3]. Autonomous driving technology can be summarized as: “Identify the surrounding environment through a variety of on-board sensors, and make analysis and judgments based on the obtained environmental information, thereby controlling the movement of the vehicle, and ultimately achieving autonomous driving”.
Autonomous driving technology mainly includes three parts: perception, planning and controlling [
4]. Planning is the key to autonomous driving. It is necessary to make reasonable judgments on the scene to ensure the safety of autonomous vehicles. It acts as a decision maker. On the basis of satisfying safe driving, the comfort of the vehicle must also be considered to realize different plans for different types of driving scenarios.
In order to improve the planning capabilities of automated vehicles, it is of great significance to introduce the driver models. Autonomous driving is still a long time away from large-scale commercial applications. For a long time in the future, there will be a traffic scene where autonomous vehicles and traditional vehicles coexist [
5]. Therefore, autonomous vehicles must effectively identify the driver characteristics of the surrounding traditional vehicles, which allows autonomous vehicles to have more reasonable plans. As in [
6], a non-cooperative vehicle-to-vehicle trajectory-planning algorithm with consideration of the characteristics of different drivers is presented. A non-cooperative control algorithm considering each of the driver–vehicle systems as a player is employed to plan collision-free trajectories for the encountering vehicles with respective initial driving intentions. The non-cooperative problem is solved with the theory of Nash equilibrium and is ultimately converted to a standard nonlinear Model Predictive Control problem. In [
7], a driver detection system is developed to warn the driver of the current traffic conditions. It uses vehicle status and sensor detection signals to analyze the driver’s status, and provides a reasonable driving operation mode to enhance the driver’s operating experience.
There are three main categories of driver classification [
8]: (1) detection based on head movement changes [
9]; (2) detection based on the driver’s mental state [
10]; (3) detection based on the driver’s handling characteristics [
11]. The research carried out in this paper aimed to determine a driver’s category by detecting his/her manipulation behavior.
Based on the driving characteristics of the driver, it is necessary to collect operating data such as braking, acceleration and steering during driving. The driver will plan their route based on the state of the vehicle, the state of other vehicles and road conditions. Fixed algorithms often make inherent driving strategies for complex and changeable driving conditions, and will not have personalized decision-making methods. However, age, gender, driving experience, subjective emotions and mental states will all have different effects on the driver at a given moment [
12].
As a research hotspot in autonomous driving technology, there are many algorithms in path planning, including the A* algorithm [
13,
14], Rapidly-exploring Random Tree (RRT) [
15,
16], Artificial Potential Field (APF) [
17,
18,
19] and some other path planning methods for collision avoidance problems [
20,
21,
22,
23], et al.
The A* algorithm is a typical heuristic path planning algorithm. It is a graph search algorithm which has been widely used in various types of robots. Hart PE proposed the A* search algorithm on the basis of the Dijkstra graph search algorithm [
24]. From the principle of the algorithm, the realization of the heuristic algorithm makes fast node searching possible. Its design focus is to construct the map and determine the cost function, so it is suitable for searching the space known in advance. With the increase in the map, the cost of memory and speed also increased. As in [
13], a recursive path planning method is proposed, which uses the reduced state of the search space and comprehensively considers the kinematics, shape and steering space of the vehicle for path planning. In [
14], a new A* algorithm based on the equal-step sampling of the vehicle kinematics model is proposed, which combines vehicle kinematics and introduces an enhanced cost function, which greatly improves the comfort of the path.
RRT is a sampling-based path planning algorithm, which is characterized by randomly extracting the configuration space or state space, and searching for connectivity in it [
25,
26]. This allows rapid planning in semi-structured spaces, and it is not only suitable for ordinary two-dimensional planes, but also for three-dimensional spaces. In addition, it can also take incomplete constraints into consideration (such as the maximum turning radius of the vehicle). As proposed in [
15], an improved RRT-based automatic vehicle motion planner can effectively navigate in the chaotic environment of narrow passages. Additionally, in order to smooth the trajectory, a post-processing algorithm with trajectory optimization is proposed. In [
16], based on the basic RRT algorithm, a “target-oriented RRT (GRRT)” algorithm is proposed, which provides an alternative method for probabilistic target bias, thereby avoiding local collisions. However, because RRT performs a random search in the solution space, the search trajectory is random and does not guarantee uniqueness and optimality. The trajectory generated by this algorithm is not continuous, which is not suitable for autonomous vehicles [
27]. With the development of algorithms, improved algorithms considered from the perspective of rapidity and optimality are gradually being applied to actual control scenarios [
28].
The APF method, due to its simple structure, ideal real-time performance and the ability to generate smooth paths, has been successfully applied to many vehicles and robots. APF is derived from a virtual force method proposed by Khatib [
29], which designs the motion of the robot as a motion in an artificial gravitational field, planning a safe and smooth path. In [
17], a method of expressing complex-shaped obstacles by calculating the potential field of a series of circular obstacles in the harmonic potential field was proposed; in [
18], a new method for automatically detecting lane change in other vehicles is proposed, which can change its position according to the distribution of neighboring vehicles, and can describe general vehicle lane change by applying dynamic latent models; in [
19], an improved artificial potential field (IAPF) method is proposed, which introduces the distance between the robot and the target point into the function of the original repulsive force field. By changing the original direction of the repulsive force, the trap problem caused by the local minimum is avoided.
The path planning method for obstacle avoidance is also a current research hotspot. As in [
20], to enhance the capabilities of such vehicles without increasing weight or computing power, a reactive collision avoidance method based on open sectors is described. The method utilizes information from a two-dimensional laser scan of the environment and a short-term memory of past actions and can rapidly circumvent obstacles in outdoor urban/suburban environments. In [
21], a new real-time obstacle avoidance method for mobile robots was developed and implemented. This method, named the vector field histogram (VFH), permits the detection of unknown obstacles and avoids collisions while simultaneously steering the mobile robot toward the target. In [
22], a new concept, the Admissible Gap (AG), for reactive collision avoidance is proposed. A gap is considered admissible if it is possible to find a collision-free motion control that guides a robot through it, while respecting the vehicle constraints. On this basis, a new navigation approach was developed, achieving an outstanding performance in unknown dense environments. In [
23], a path planner solution that makes it possible to autonomously explore underground mines with aerial robots (typically multicopters) is presented. The designed path planner is defined as a simple and highly computationally efficient algorithm which, by only relying on a laser imaging detection and ranging (LIDAR) sensor with simultaneous localization and mapping (SLAM) capability, permits the exploration of a set of single-level mining tunnels.
As the requirements for control performance increase, many researchers use model predictive control algorithms (MPC) [
30,
31,
32,
33] to include constraints that need to be considered in planning. For example, Gutjahr B converts the problem of vehicle lateral tracking along a reference curve into a constrained optimization problem. Based on the linear time-varying model in the backward time domain, the vehicle is controlled to drive along the optimized roads [
34]. In recent years, many algorithms combining APF with MPC have been successfully applied [
35,
36,
37]. The main idea of this type of algorithm is to use the global reference trajectory as the gravitational field, obstacles as the repulsive force field and the resultant force as the cost function of MPC from optimization, so as to obtain the least costly control variables [
35].
In order to make the planned paths more in line with the actual road conditions, some researchers have integrated the driver model into the path planning algorithm to make the autonomous vehicles have human-like characteristics. In [
38], a new driver model for critical maneuvering conditions is combined with a new steering strategy. The vehicle can be adjusted to accurately follow the desired path with the driver model. Additionally, the stability of the vehicle and the smoothness of the steering angle input are comprehensively considered. In [
39], a path planning method for imitating the lane-changing operation of excellent drivers is proposed. The excellent driver lane-changing model is established based on the genetic algorithm (GA) and back propagation (BP) neural network trained by the data of the lane-changing tests. The proposed approach can plan out an optimized lane change path according to the vehicle condition by learning the excellent drivers’ driving routes.
Among the above path planning algorithms, APF has been widely used in path planning in many fields due to its simplicity, efficiency and wide applicability. However, it also has limitations such as the target point may not be reached, the local minimum and the fixed potential field function. In order to solve the shortcomings of APF, this paper combines it with the driver characteristic identification, giving APF the characteristics of human-like decision making. The driving characteristics of different surrounding drivers are taken into consideration in the path planning of autonomous vehicles, so that the planned path can be adapted to different surrounding manual driving vehicles.
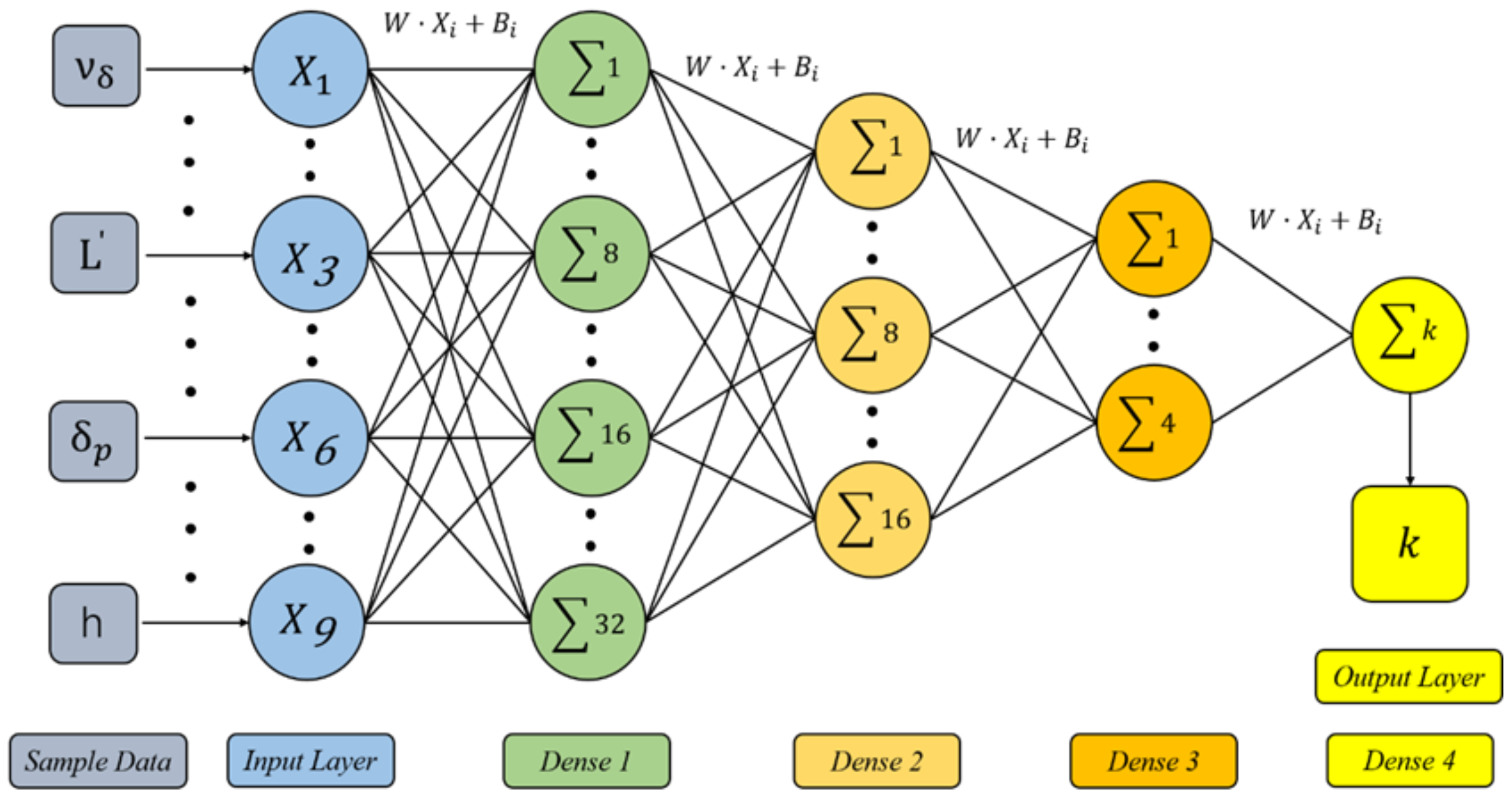
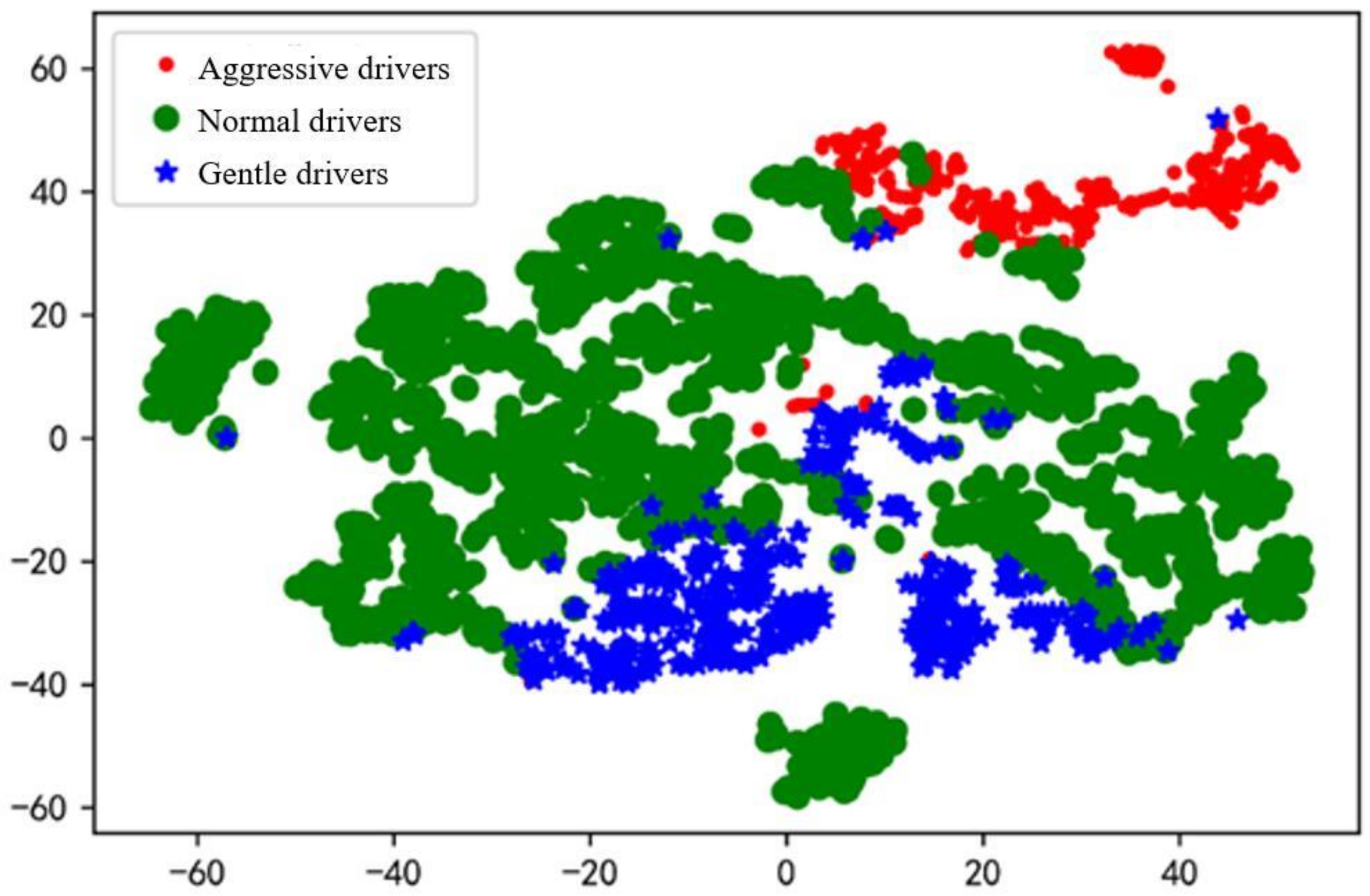
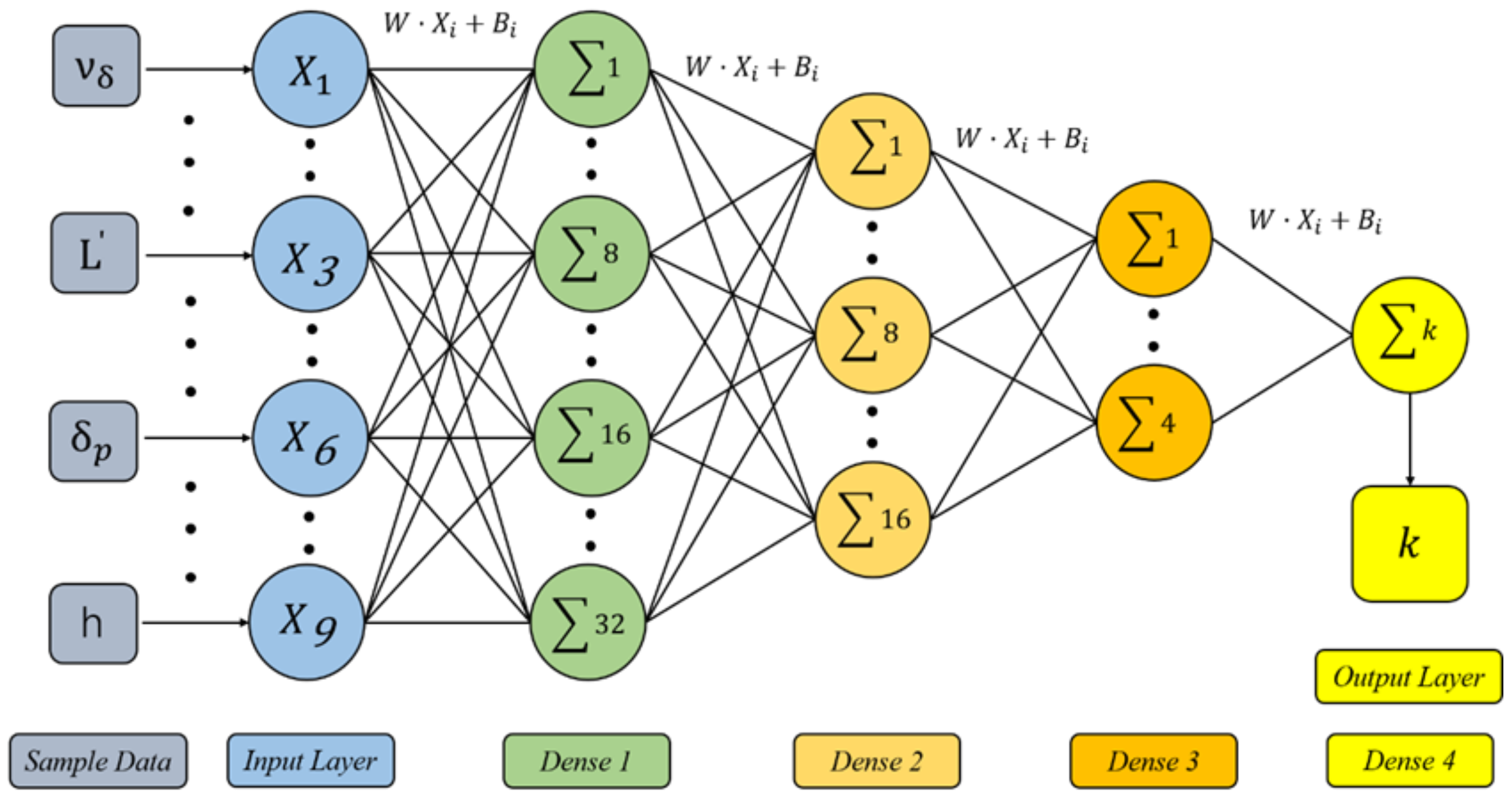
The primary contributions of this paper lie in two aspects: (1) the driver characteristic identification algorithm based on the K-means clustering analysis algorithm and Keras neural network model can accurately classify the driving styles of different drivers; (2) an improved APF combined with driver characteristic identification is proposed. The designed local path planning method can adapt to different surrounding manual driving vehicles.
This paper is organized as follows:
Section 2 introduces the driver identification test.
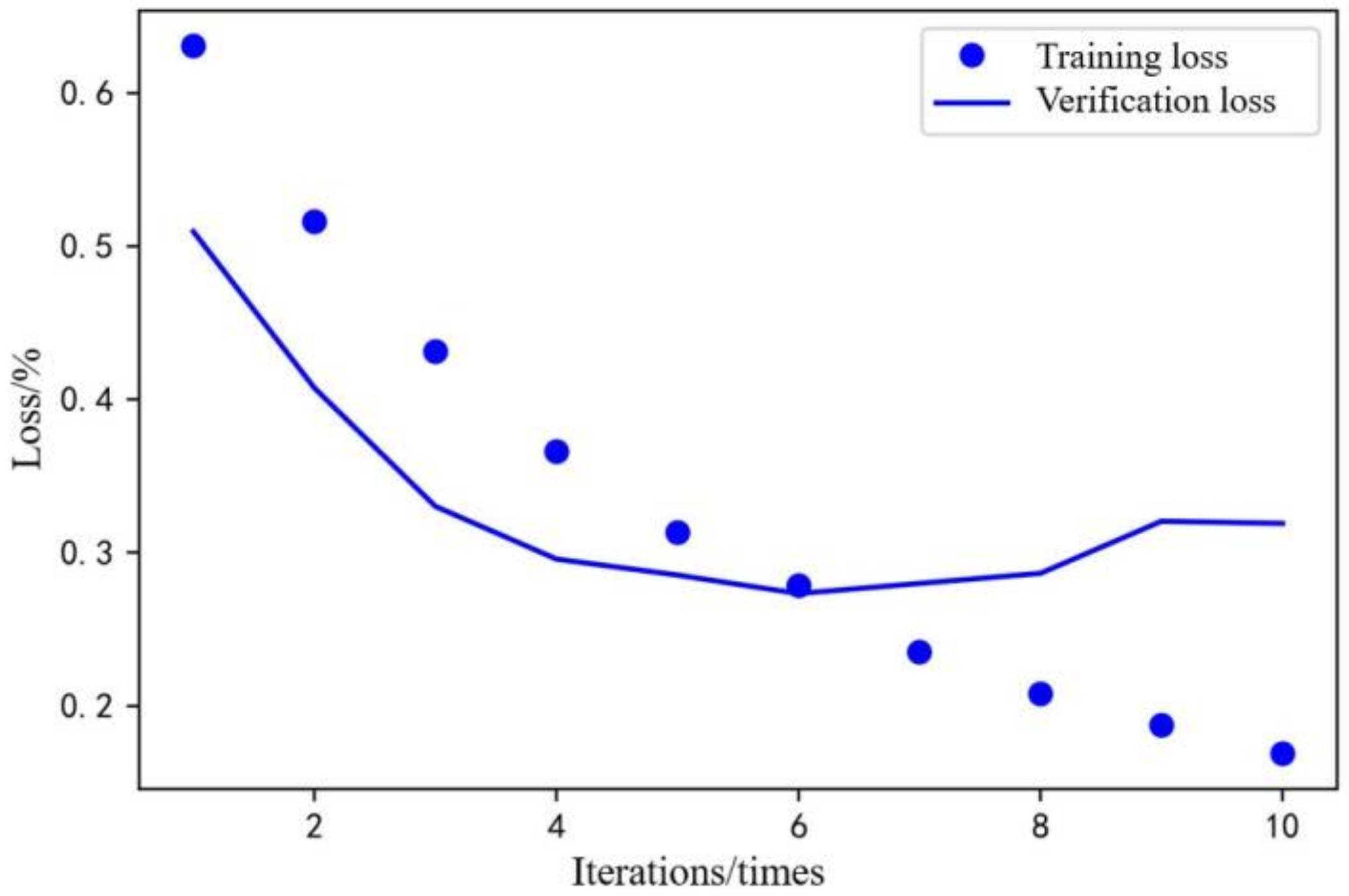
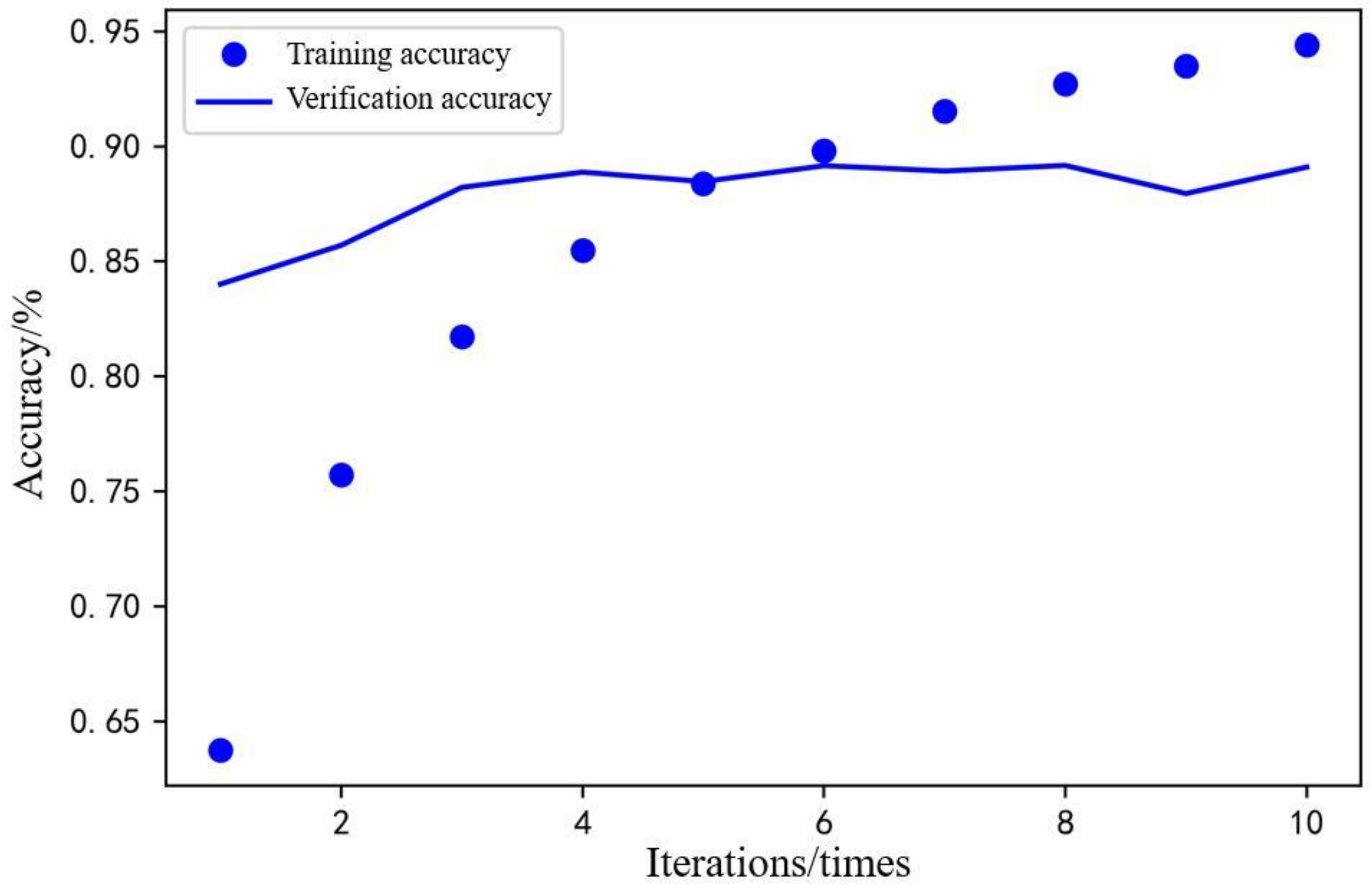
Section 3 classifies the test data and imports them into the Keras neural network model for learning.
Section 4 combines the drivers’ characteristic identification with IAPF, and proposes an improved local path planning algorithm.
Section 5 presents the simulation and results of the proposed path planning paradigm in this paper. Conclusions are made in
Section 6.
2. Driver Characteristic Identification
A semi-physical simulation platform was used in the test. A virtual test platform was built by Matlab/Simulink powered by MathWorks (Natick, Massachusetts 01760, USA) and Prescan powered by Siemens (80333 Munich, Germany). A driving control platform for the driver was provided by Logitech G29. The driver characteristic identification test was established to accurately reflect the differences in driving behavior of different drivers.
2.1. The Experimental Scene Construction
Studies have shown that certain objective driving factors, such as gender, age and driving experience, all have impacts on driving habits; subjective driving factors, such as emotions and traffic scenes, are the same [
40]. A driver may show different characteristics in different driving scenarios. Therefore, the above conditions need to be fully considered in selecting testers. In order to distinguish the driving proficiency of the testers, they were divided into three sections in terms of driving age, namely, 0–3 years, 3–6 years and more than 6 years. There were 30 drivers of different ages, genders and driving ages in the tests. The specific statistics are shown in
Table 1 and
Table 2.
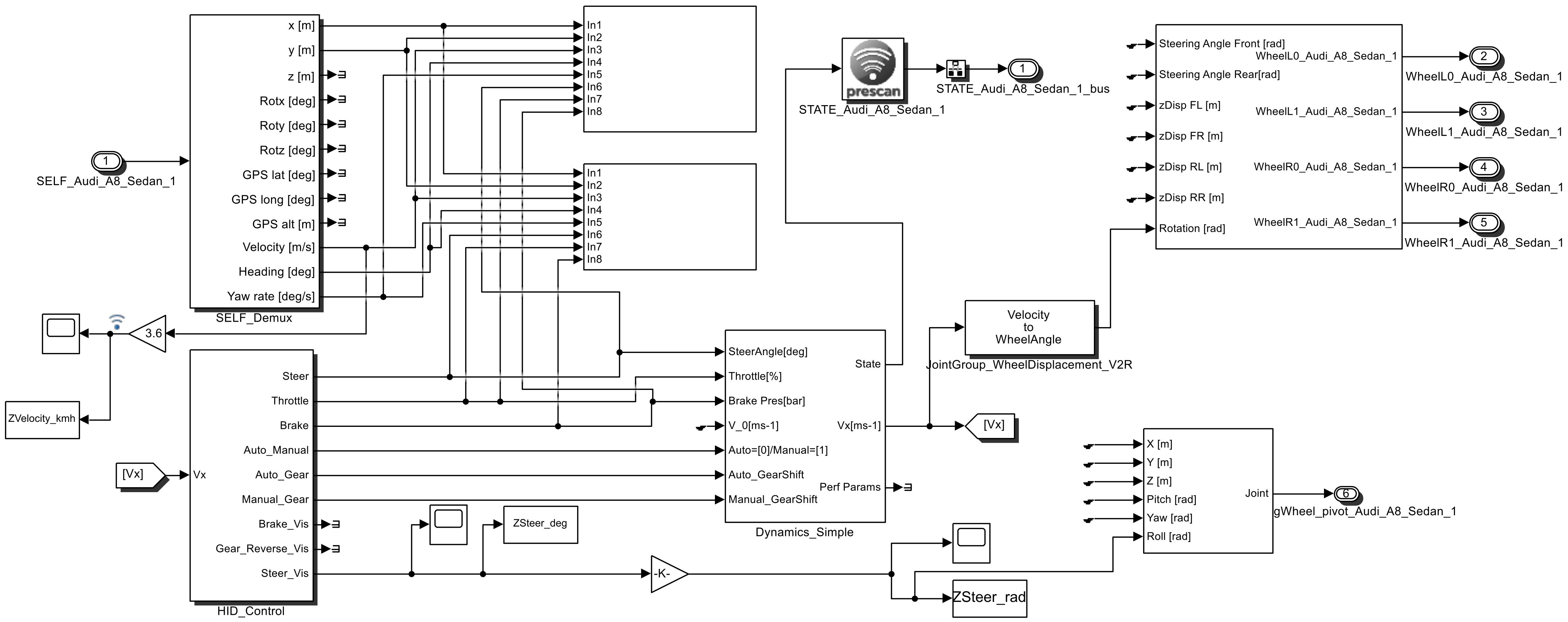
The virtual driving test platform was composed of Matlab/Simulink, Prescan and Logitech G29. When establishing a joint virtual driving experiment platform, it is necessary to download and install the G29 driver software on Logitech’s official website, and then install and connect the steering wheel and pedal kit to the computer. The configuration file of Prescan is created in the driver software. The button settings and sensitivity of the steering wheel, up/down gear and pedal kit are set to achieve true driving torque feedback. It is the most critical to establish the relationship between the vehicle and the G29 control model in Prescan. The specific method is to select the dynamic model in “Dynamics” in “Object Configuration”, then select “Game Controller” in “Driver Model”, select “Logitech G29” and check “Force Feedback”. Matlab/Simulink is the linker of Prescan and Logitech G29. It provides Prescan with the corresponding vehicle dynamics model and transmits the signals of G29 to Prescan.
Figure 1 shows the Prescan and Matlab joint simulation platform.
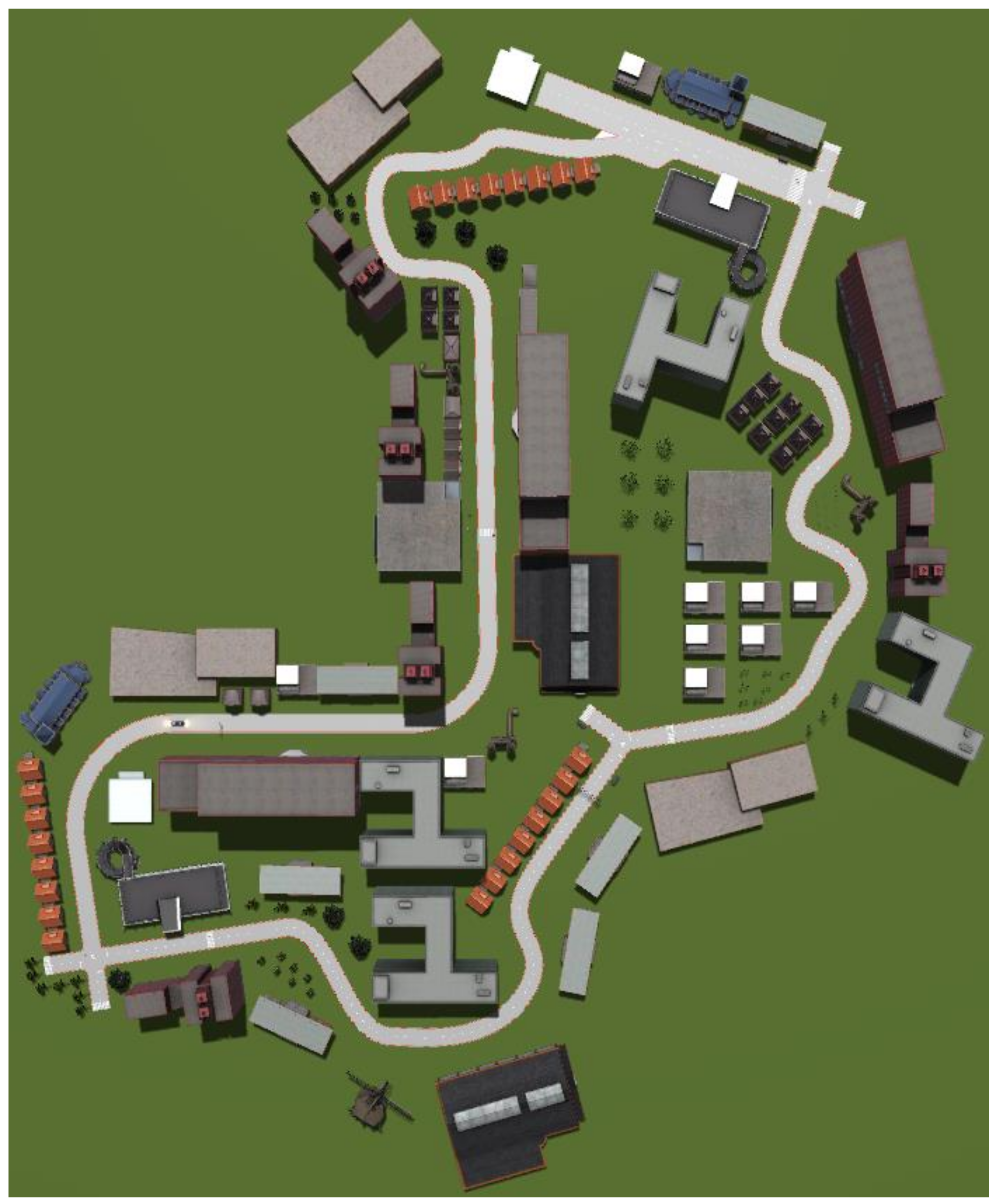
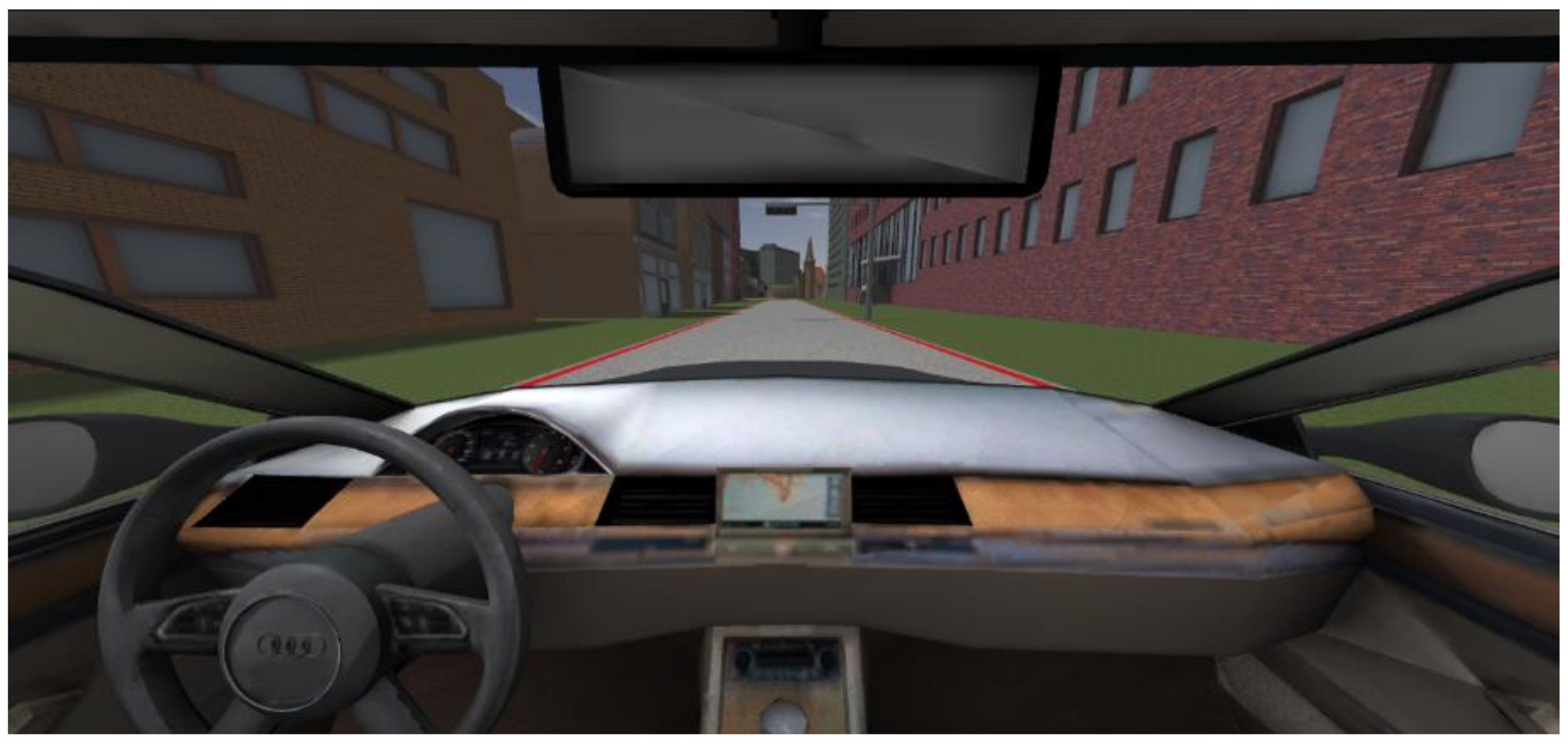
In the tests, the driving scene was the basis for distinguishing the driving characteristics of different drivers. It was built in Prescan, taking into account many factors, such as roads, signal lights, buildings and weather. The built-up driving scene is shown in
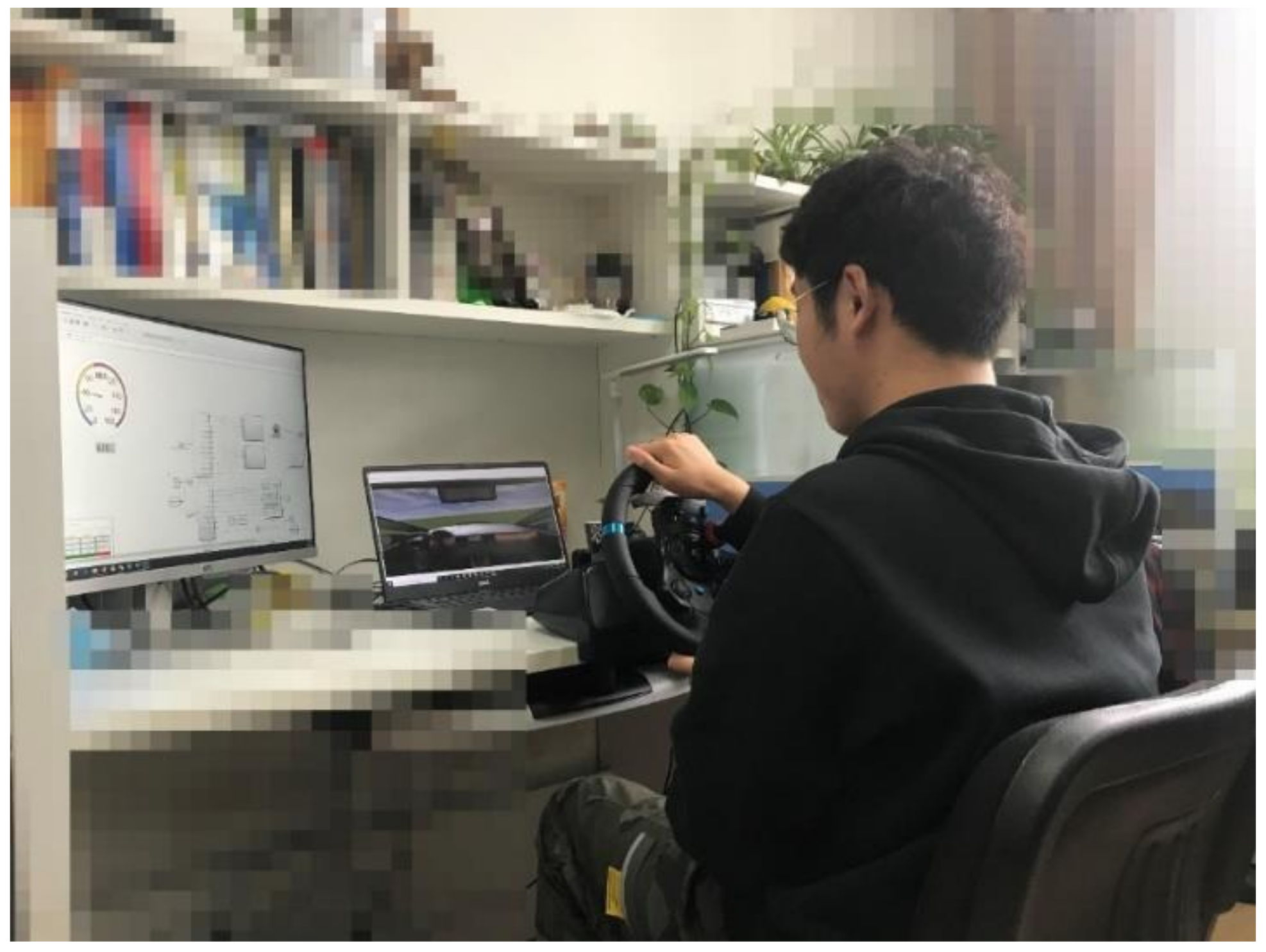
Figure 2. The driver’s viewing points and driver under test are shown in
Figure 3 and
Figure 4.
2.2. Collection and Processing of Experimental Data
The test vehicle was set to Audi_A8_Sedan of Volkswagen, Germany. In the test, the following data of each driver were collected: driving time, t; throttle, L; brake pressure, P; steering wheel angle, ; speed, v; Yaw rate, ; vehicle heading angle, h. Braking, acceleration and steering were the drivers’ main behaviors, so the throttle, braking pressure and steering wheel angle were three important influence factors. The other three variables were affected by these three operations and served as auxiliary factors.
Data of drivers in the curve needed to be separated. The data were in the same time scale, so the steering wheel angle could be used as the criterion; when the absolute value of the steering wheel angle was less than 10° or greater than 10°, but the duration was less than 2 s, it was considered that the vehicle had no steering operation [
41]. Therefore, the relevant operations during the steering process of drivers could be filtered out. Two aspects of steering wheel angle data were processed: steering wheel angular speed and steering wheel angle standard deviation; the specific formulas are as follows:
In Equations (1) and (2), is the steering wheel angular speed, which indicates the average speed of the steering wheel during per segment steering operation time. indicates the maximum steering wheel angle in this section of steering operation; indicates the minimum steering wheel angle in this section of steering operation. is the standard deviation of the steering wheel angle, which represents the standard deviation of the steering wheel angle during the n-segment steering operation of the driver during per test. n is the number of steering operations extracted from the driver’s experimental data. The meaning of n in the subsequent formulas in this section is the same. is steering wheel angle, and is the mean value of the steering wheel angles.
The processing methods of throttle and brake pressure were similar to those of the steering wheel angle. The contents of the throttle were the changing rates and the standard deviation of the throttle. The contents of the brake pressure data processing were the average and the standard deviation of the braking pressure. The specific formulas are as follows:
In Equations (3)–(6), is the rate of change of throttle opening per segment, indicates the maximum throttle opening in this section of steering operation, indicates the minimum throttle opening in this section of steering operation. indicates the standard deviation of the throttle opening of the driver in the n-segment steering operation during per test. is the throttle opening in a certain period of time, is the average value of the throttle opening for n steering operations. is the rate of change in brake pressure per segment, indicates the maximum brake pressure in this segment of the steering operation, indicates the minimum brake pressure in this segment of the steering operation. indicates the standard deviation of the brake pressure of the driver in the n steering operations during per test. is the brake pressure within a certain period of time, is the average value of brake pressure for n steering operations.
The data processing contents of vehicle speed, yaw rate, and heading angle corresponded to the average vehicle speed, average yaw rate and average heading angle, respectively. The specific formulas are as follows:
In Equations (7)–(9), t is the number of time points in a certain period of steering operation time; , and are the vehicle speed, yaw rate and heading angle at the corresponding point in time, respectively; , and are the average vehicle speed, average yaw rate and average heading angle, respectively, corresponding to the period of steering operation time.
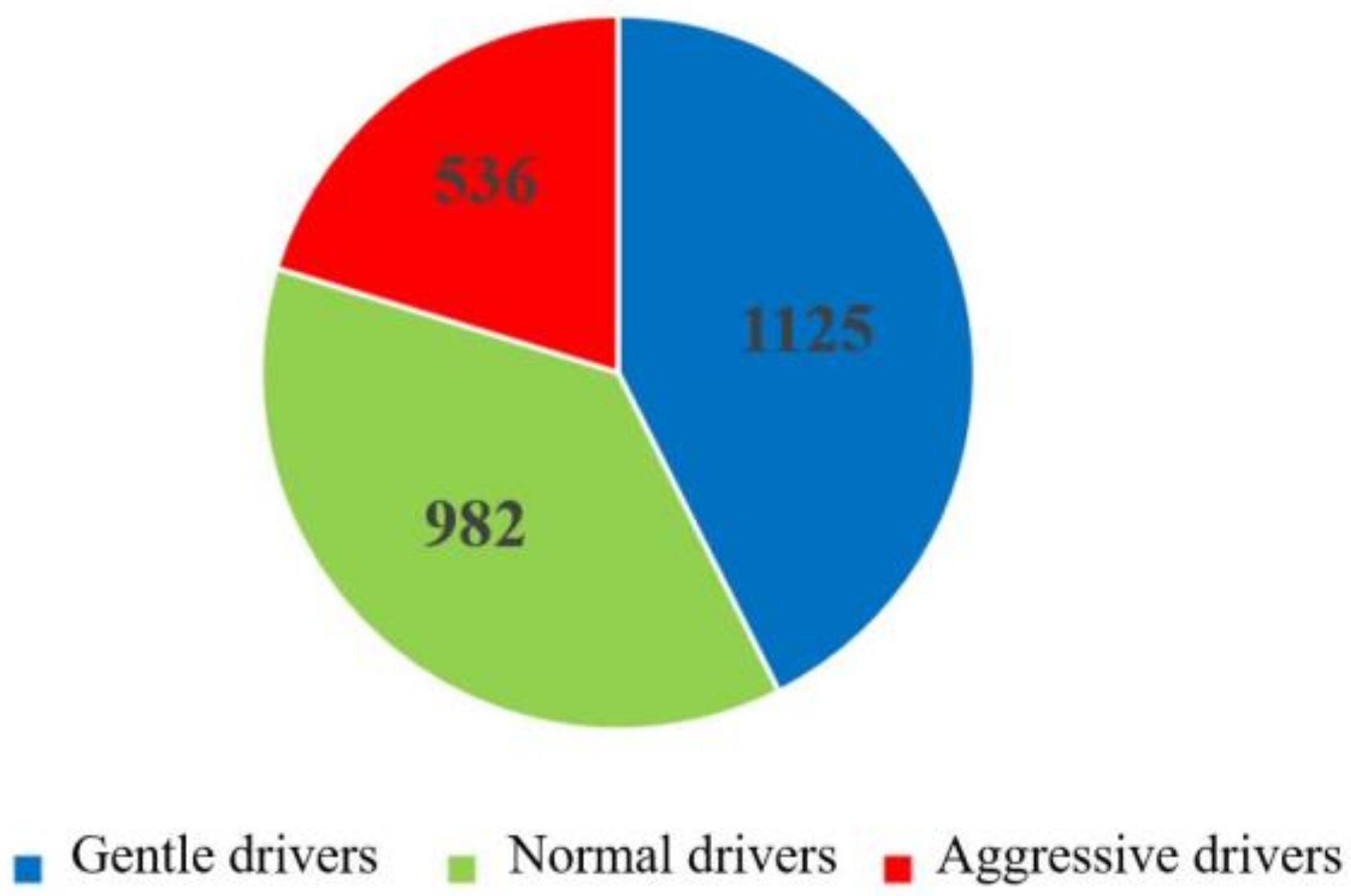
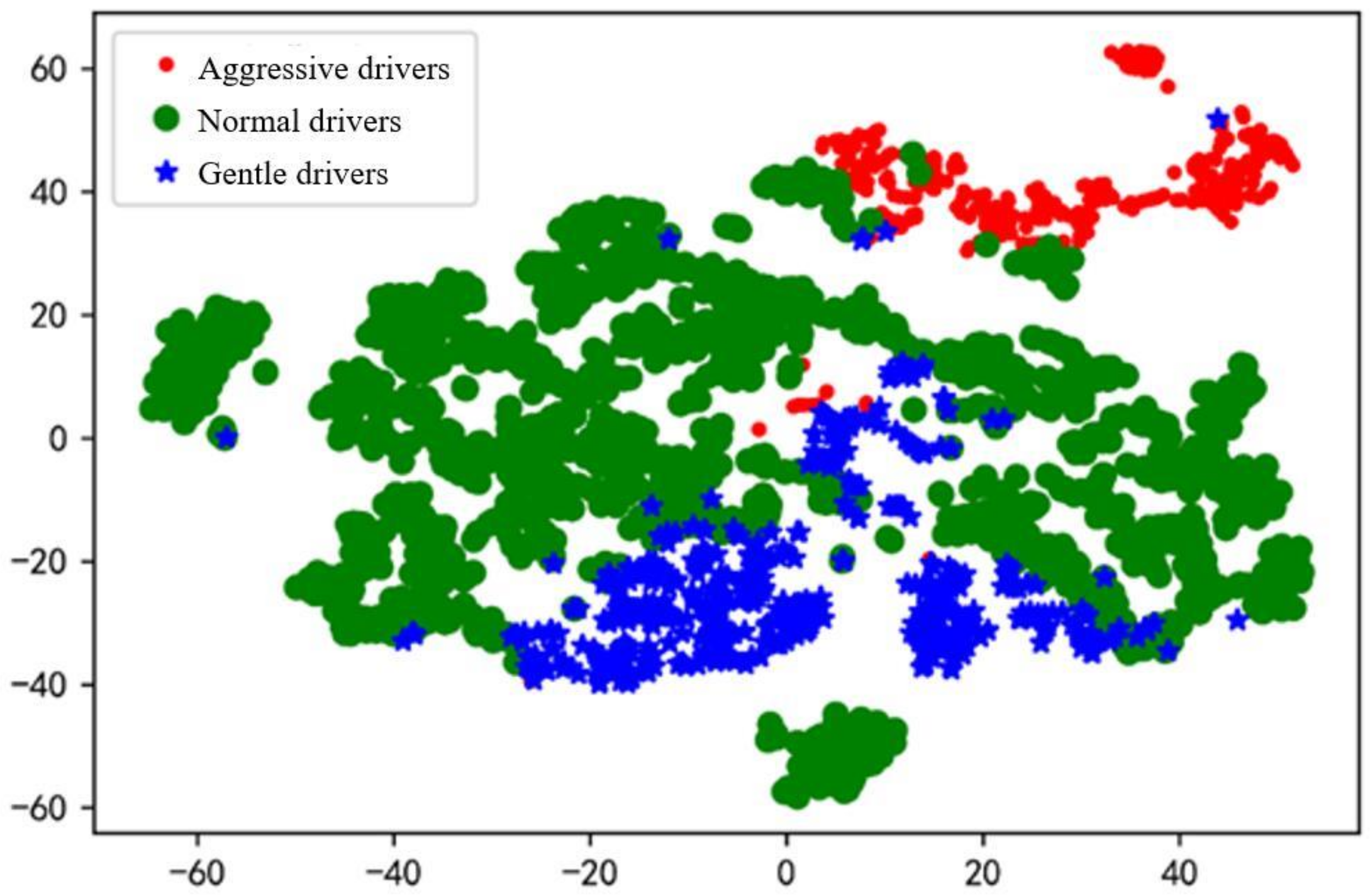
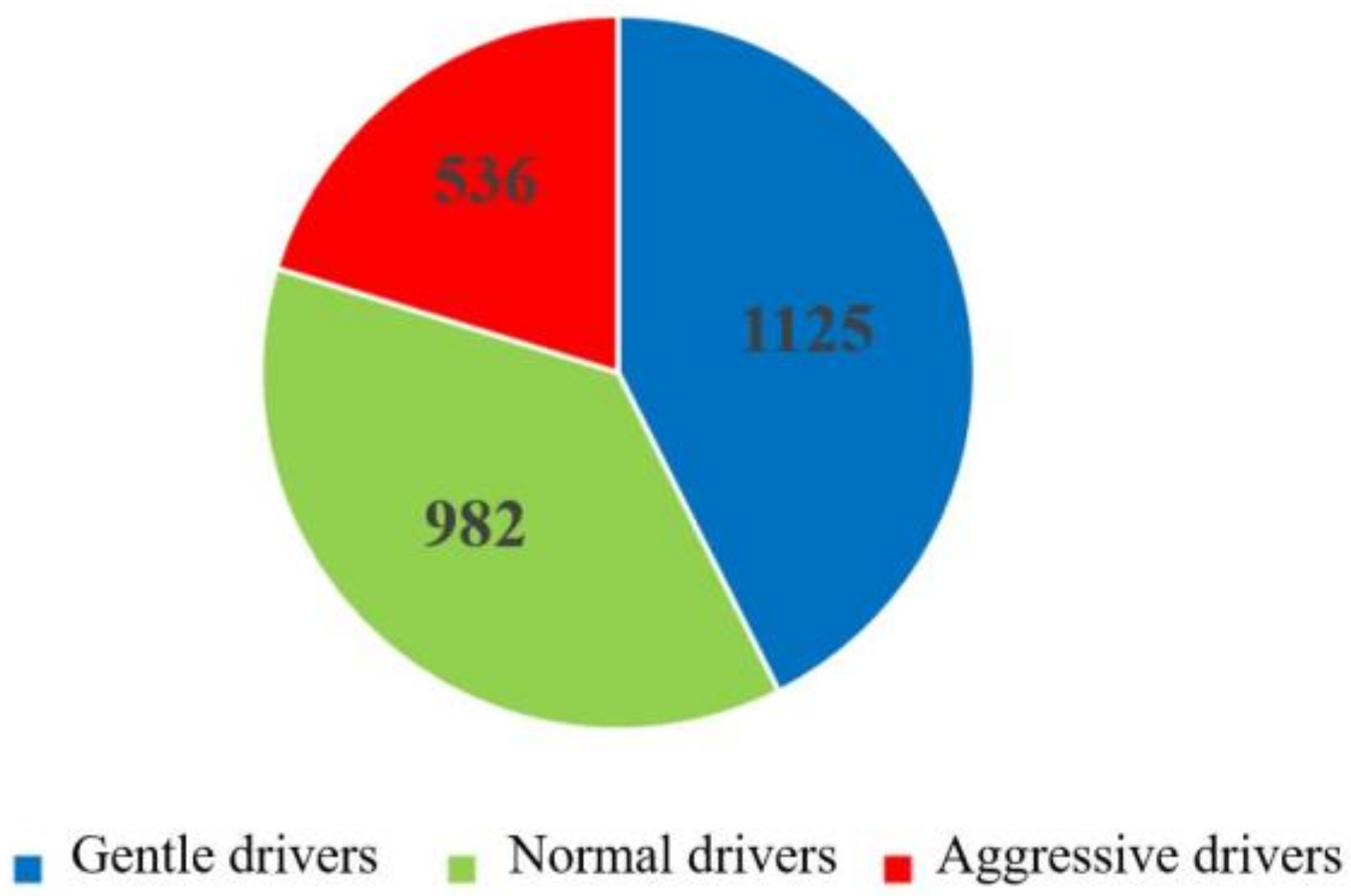
After the above-mentioned data screening and data processing, a total of 2642 sets of driver steering operation-related data were extracted from the driving test data of 30 drivers. These data were used for K-means cluster analysis and neural network model training.
4. Human-Like Path Planning Based on APF
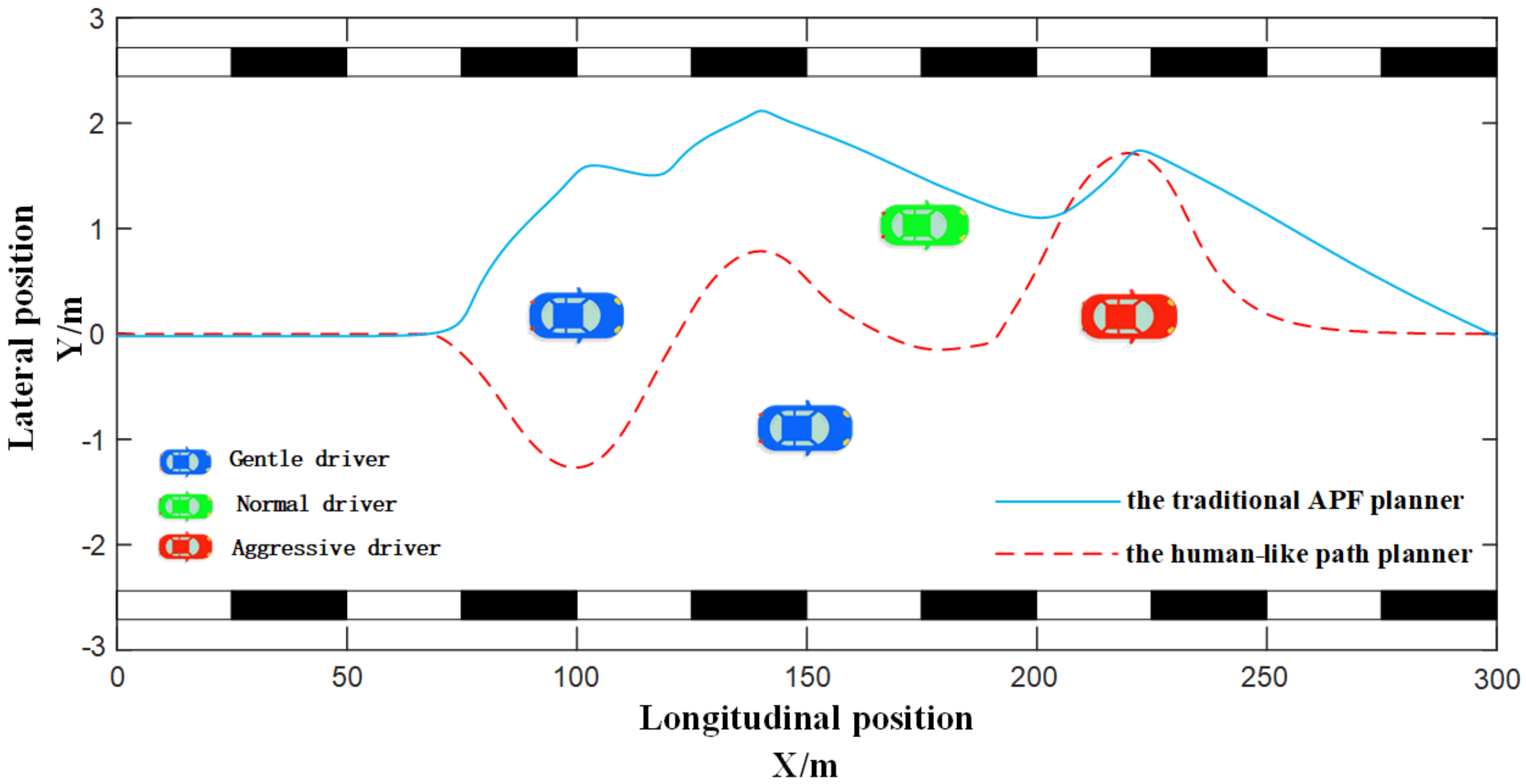
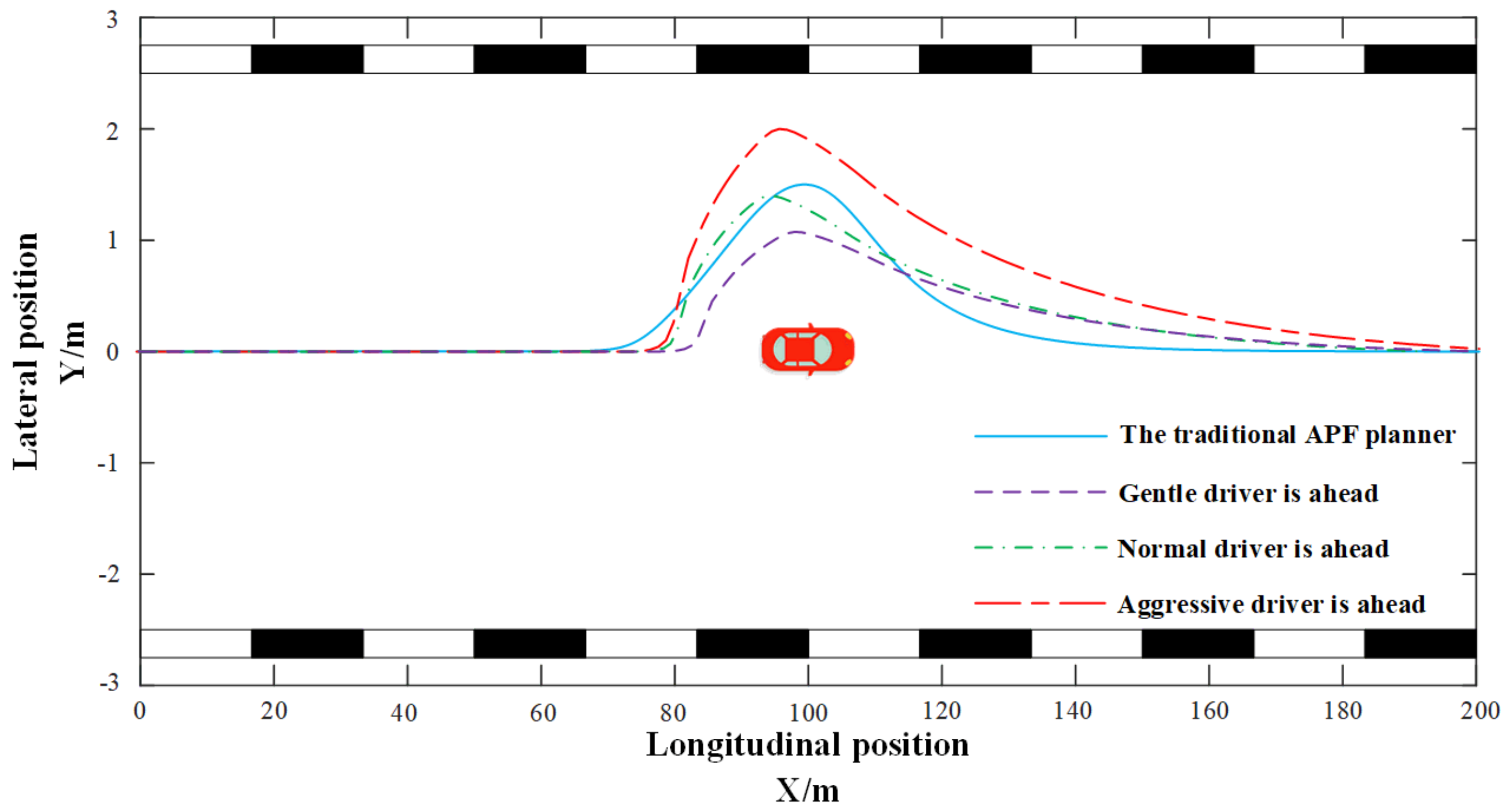
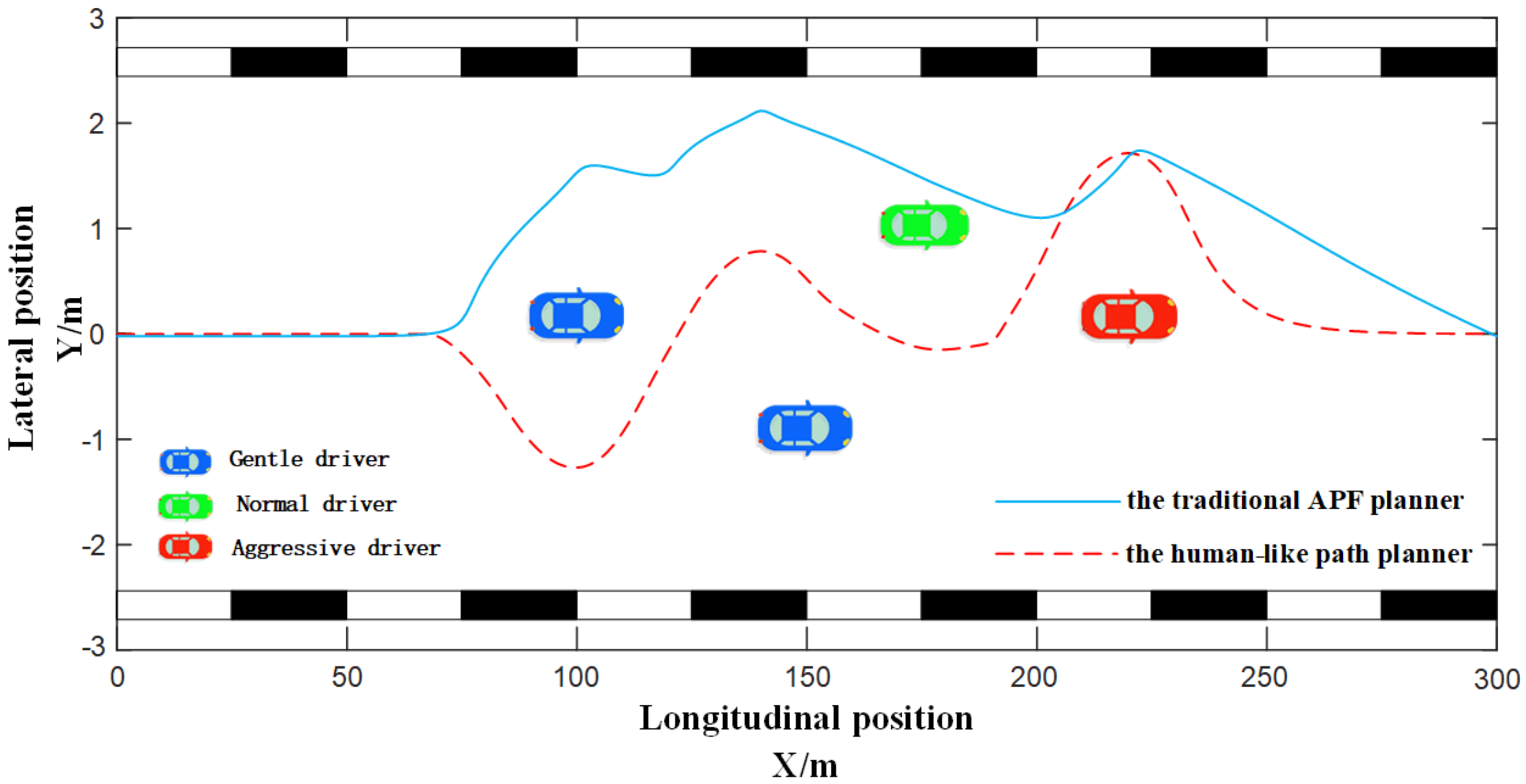
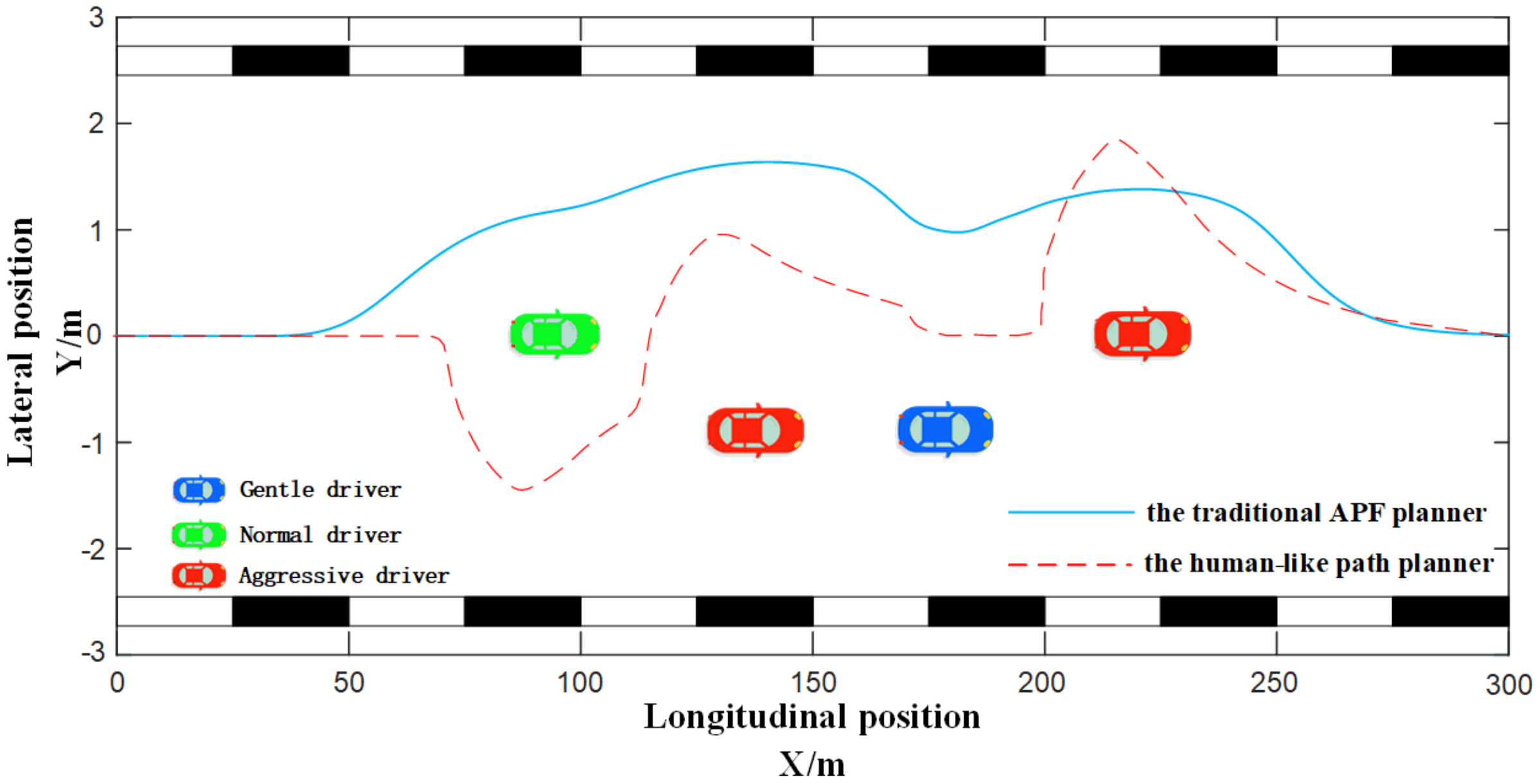
The design of the path planning controller based on driver characteristics and APF mainly considered the planning differences formed by the different repulsion potential fields generated by different drivers. In the path planning process of an autonomous vehicle, other manual driving vehicles exist as obstacles, the obstacle repulsion potential fields generated by different drivers are different. The road boundary also has a restraining effect, and the repulsive force field generated by the road boundary needs to be considered. The scenario designed in this section is the local path planning in the overtaking process. Combined with the drivers’ characteristics, three different driver obstacle repulsion potential fields and road boundary obstacle repulsion potential field were designed. Once autonomous vehicles could plan different paths based on different types of drivers in the traditional vehicles ahead, the path planning had the attribute of human-like decision making.
4.1. Artificial Potential Field Method (APF)
APF imitates the field concept of physics, fictionalizing a potential field in the scene. In the path planning, the end point was set as a gravitational potential field, and obstacles and road boundaries were set as repulsive potential fields; the controlled object moved under the influence of gravitational and repulsive forces in the potential fields, and finally reached the end [
43].
The gravitational potential field was attractive to the controlled object. It had negative potential energy, and its function is expressed as follows:
In Equation (13), represents the gravitational field function; is the gravitational field factor; is the position coordinate of the controlled object in the planning scene; is the position coordinate of the target point in the planning scene; , which represents the Euclidean distance; is the gravitational field factor.
Gravity was the negative gradient of the gravitational field function. It was the fastest descending direction of the gravitational field function. The formula of the gravitational function is as follows:
The repulsive force field had repulsive force on the controlled object. Its function is expressed as follows:
In Equation (15), represents the repulsion function; is the gravitational field factor. is the position coordinate of the controlled object in the planning scene; is the position coordinates of the obstacle in the planning scene; is the scope of the obstacle.
The repulsion is the negative gradient of the repulsion field function
. It represents the direction of the fastest decline in the repulsion potential field function,
. The formula is:
The gravitational potential field and the repulsive potential fields were combined to obtain the resultant potential field. The calculation rule followed the vector calculation:
In Equation (17), represents the resultant potential field of the artificial potential field; represents the number of obstacles and road boundaries.
The formula of the resultant force is as follows:
From Equations (17) and (18), the potential field potential energy and potential field force of the controlled object at each point in the planning scene could be calculated, and the controlled object moved in the direction with the fastest gradient drop under the influence of the situation force until it reached the target point.
4.2. Normalization of the Distances between the Vehicle and the Obstacles
The obstacle repulsion field is generally set to be circular. However, the situation is different in path planning. According to the actual driving conditions of a vehicle, it needs a larger repulsion potential field in the longitudinal and a smaller repulsion potential field in the lateral. Therefore, the repulsion field of a vehicle is similar to a diamond. If the radius of the repulsive force field is too large, the lateral distance of the vehicle during obstacle avoidance will be too large, which does not conform to actual driving habits and traffic laws; if the radius of the repulsive force field is too small, the longitudinal distance of the vehicle during obstacle avoidance will be insufficient, resulting in a risk of collision. The obstacle repulsion potential fields of a vehicle mainly depend on the speed and the maximum braking deceleration. The longitudinal safety distance is generally about tens of meters to one hundred meters, and the lateral safety distance is generally about a few meters. Therefore, the longitudinal and lateral distances of the vehicle obstacle repulsion potential field need to be normalized according to different safety distances. The formulas for the longitudinal safety distance and the lateral safety distance are as follows [
44]:
In Equations (19) and (20), is the vertical distance; is the minimum longitudinal distance; is the longitudinal speed of the vehicle; is a safe time interval, used to compensate vehicle response time; is the longitudinal relative speed; is the maximum braking speed; is the horizontal distance; is the minimum lateral distance; is the longitudinal speed of the obstacle; is the relative heading angle; is the relative lateral velocity.
The following formulas were used to normalize the actual distances between the vehicle and obstacles:
In Equations (21)–(23), is the longitudinal normalized distance of the vehicle, is the actual longitudinal distance between the vehicle and the obstacle; is the normalized distance of the vehicle laterally; is the actual lateral distance between the vehicle and the obstacle; is the normalized distance between the vehicle and the obstacle.
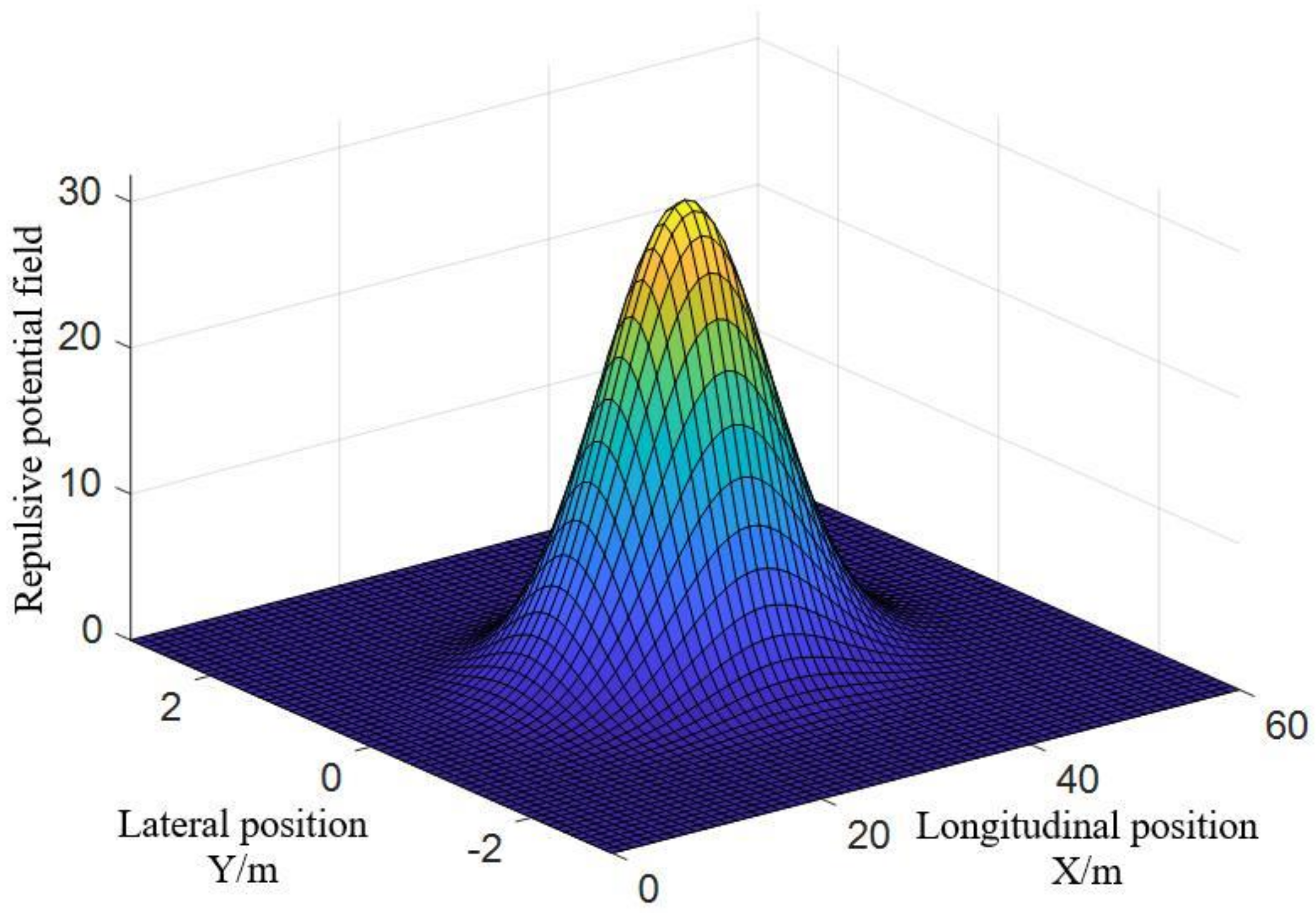
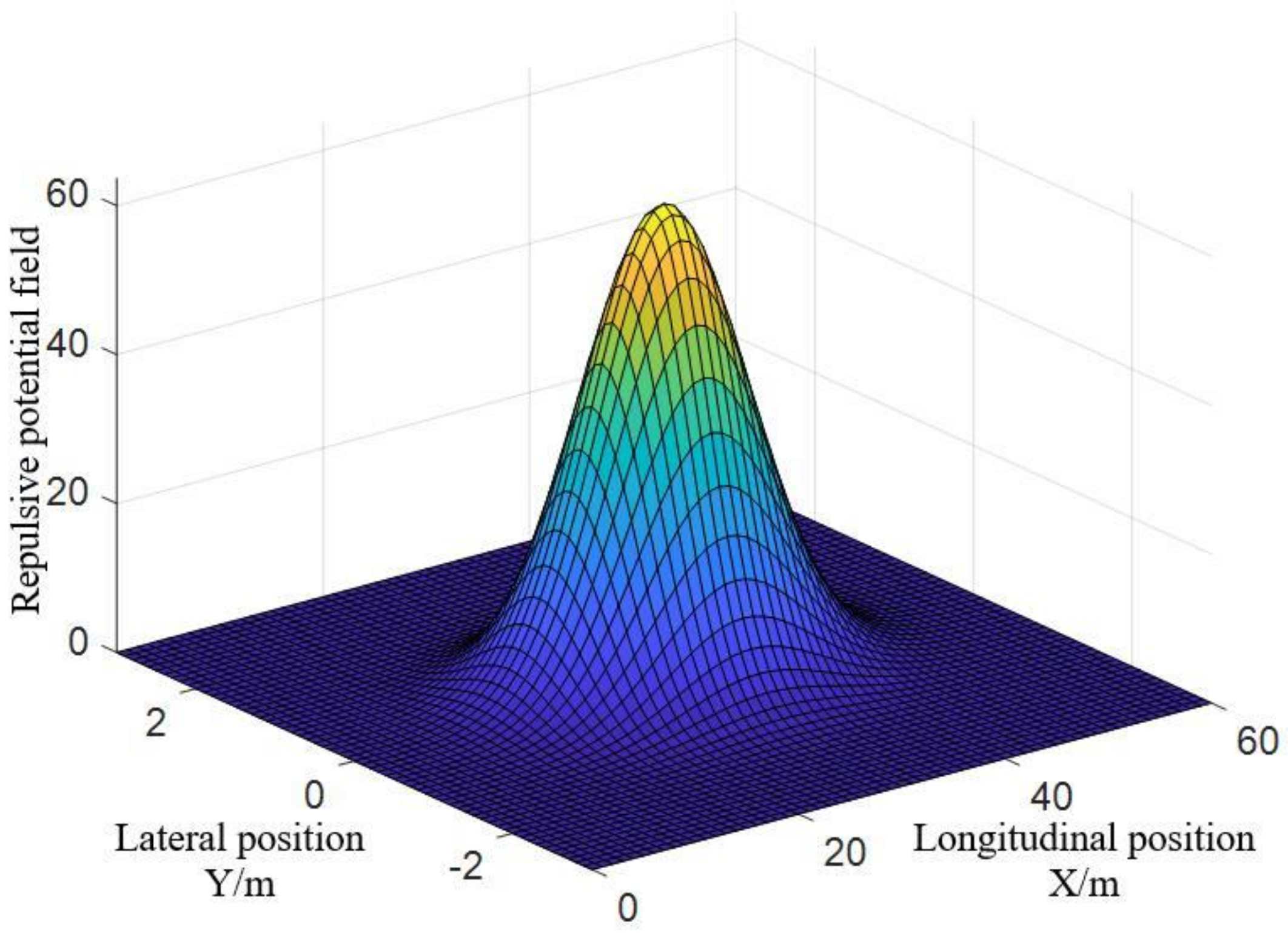
4.3. Repulsive Potential Field Function of Different Drivers
In the local path planning of overtaking scenes, different planning strategies should be adopted for different types of drivers. When a driver is of the aggressive type, his/her obstacle potential field should be set larger to reserve enough safe space; when a driver is of the gentle type, his/her obstacle potential field should be set smaller to facilitate quick overtaking. For different drivers, different repulsive gain coefficients need to be set, for which the formulas are as follows [
43]:
Equations (24)–(26) are formulas of the repulsive force potential fields of gentle drivers, normal drivers and aggressive drivers, respectively. After several attempts planning the path with different coefficients, the gain coefficients of the repulsive force potential field of gentle drivers, normal drivers and aggressive drivers were determined, respectively: is the gain coefficient of gentle drivers’ repulsive force potential field, with a value of 5; is the gain coefficient of normal drivers’ repulsive force potential field, with a value of 25; is the gain coefficient of aggressive drivers’ repulsive force potential field, with a value of 50.
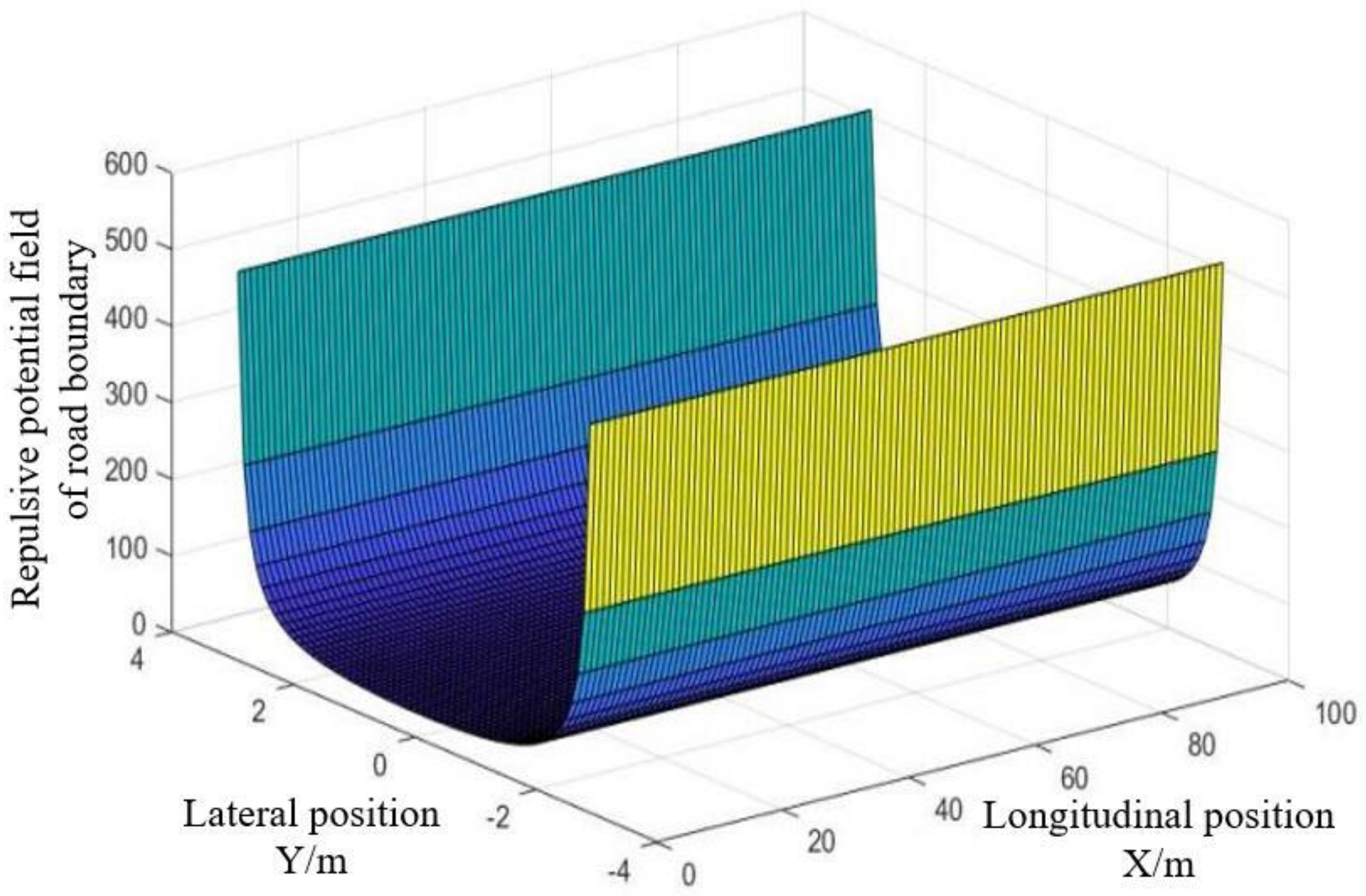
4.4. Road Boundary Repulsive Force Potential Field Function
Road constraints should also be taken into consideration. The planned path must not exceed the constraints of the road boundary, and the following function was selected as the repulsive potential field function of road boundary [
43]:
In Equation (27), is the repulsive force field at the road boundary; is the gain coefficient of the road boundary repulsive force potential field, after several attempts planning the path with different coefficients, whose value was selected as 150; is the distance between the vehicle and the left boundary of the road; is the distance between the vehicle and the right boundary of the road.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}