1. Introduction
Gadolinium is a magnetocaloric material that is used in the construction of magnetic refrigeration systems at room temperature. The metal does not stain in dry air, but an oxide film is formed in moist air. In addition, gadolinium corrodes in the presence of water at room temperature, which can have a serious influence on the long-term performance and durability of an AMRR (Active Magnetic Regenerative Refrigeration) system, gadolinium-based alloys. However, adding NaOH to the heat transfer liquid could eliminate the corrosion problem [
1,
2].
Aedah M. Jawad Mahdy et al. [
3] presents a new prototype for the magnetic refrigeration which uses gadolinium (Gd) in form of plates as the refrigerant material. The material is of high purity and the research results are presented between the cold and hot ends of the magnetocaloric bed. Andrej Kitanovski [
4] finds new applications for the magnetocaloric materials and identifies the characteristics of such materials. C. Aprea et al. [
5] built a performance map for the energy that a heat pump generates. Among this research multiple caloric effect materials were evaluated, and the final conclusion was that the most appropriate effect for the heat pump is the mechanocaloric one. C.S. Alves et al. [
6] are working on a novel thermomagnetic motor for which are presented innovative elements in the design and in the numerical simulation. Vicenzo F. et al. [
7] also presents a thermomagnetic motor using the dynamic model and provide the generated torque analytical expression containing geometrical, thermal and magnetic parameters. Guilherme H.K. et al. [
8] introduce the same type of motor but using a double C magnetic circuit in order to transform the thermal energy in mechanical one.
Jaka T. et al. [
9] highlight the AMRs (active magnetic regenerators) which use as magnetocaloric material the gadolinium. The tests were operated on multiple operating frequencies and mass-flow on an experimental device. Jeong P. et al. [
10] use a ceramic material, GDC (Gadolinium-Doped Ceria), on a LIBS (Laser-Induced Breakdown Spectroscopy) to provide a more cost-effective solution in the GDCs stoichiometric analysis. Trapanese M. et al. [
11] use a ferromagnetic material (Gadolinium (Gd)) to build a new thermomagnetic motor which is numerically simulated. In this paper, an analytical expression is given, and an experimental verification was made regarding its performances. Trapanese M. [
12] work to optimize the maximum power of a Gadolinium motor with an approach on the dynamic model. M. Ujihara et al. [
13] introduce a thermomechanical actuator with ferromagnetic material. In order to understand the thermal’s interface influence an analysis model of the thermal finite element is presented. Zeeshan et al. [
14] use water as a heat transfer fluid on a thermomagnetic heat engine based on the magnetocaloric effect of gadolinium (Gd). Zhenxing Li et al. [
15] compare three AMRs (Active Magnetic Regenerators) based on gadolinium: flake-AMR, sphere-AMR and plate-AMR. The best cooling performances were shown by the flake AMR, but the best performing at maximum temperature is the sphere AMR. Toader E. et al. [
16] present a low-speed actuator system using Gadolinium with construction and experimental data. Miki M. [
17] introduce a rotating machine with Gadolinium on an axial motor. They conclude that in order to prevent the AC loss the operation temperature has to be lowered. Alission C.S. et al. [
18] are modeling and simulating a thermomagnetic motor with gadolinium. They implement the mathematical model for the finite volume and the energy equation. Sabyasachi P. et al. [
19] analyze the gadolinium (Gd) alloys and present the thermal and electrical conductivities when the disorder is increasing. Amanie N. Abdelmessih et al. [
20] design a cooling device using permanent magnets and gadolinium (Gd) alloy. They analyze the feasibility of the magnetic cooling on apparatus which are using gadolinium (Gd) alloy. B.R. Coles et al. [
21] measure the paramagnetic resonance and the electrical resistivity on the Gadolinium Hexaboride in multiple temperature ranges. The incidence of research on gadolinium equipment and devices is low, so articles on gadolinium motors are in very small numbers. Regarding the applications in which gadolinium can be used we identified: thermomagnetic motors [
6,
7,
8,
11,
12,
14,
18], active magnetic regenerators [
2,
9,
13], thermomechanical actuators [
1,
13,
16] and as a refrigerant for observing calorific effects in heat pumps [
5].
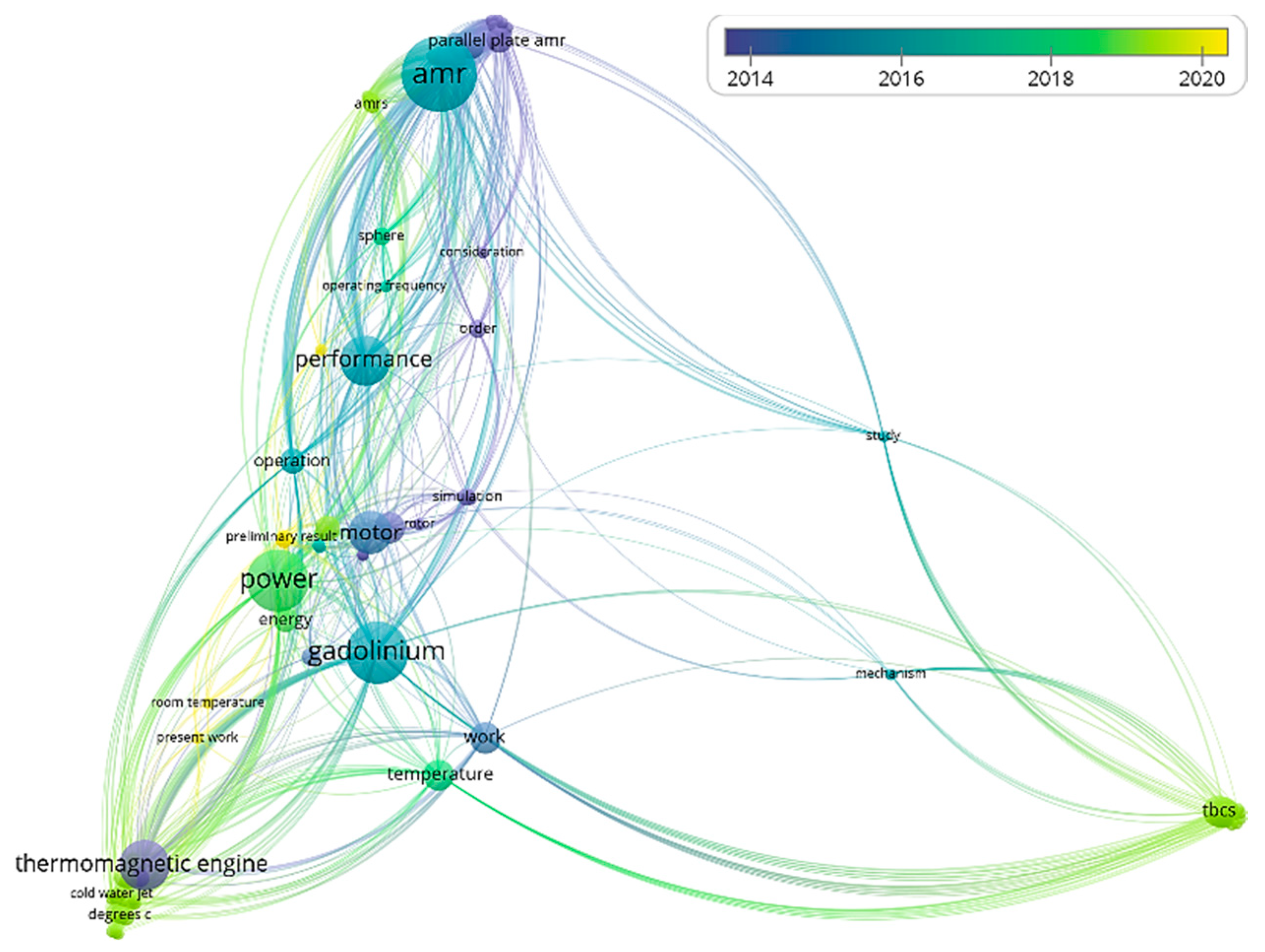
Figure 1 consists of a bibliometric network [
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21] which presents the trends on the focal points on gadolinium motors from 2014 to 2020. Around 2014, the main interests were corelated with the type of simulation that the gadolinium motor was used in, and as an important characteristic the thermal conductivity was highlighted. In 2016, the main goal migrated to the motor type, its applicability on various fields and its performance. As of 2020, the goal is to concentrate the attention over the magnetic materials and the working temperatures.
A bibliometric network is generated using the VOSviewer software environment [
22], implying the use of a standardized tag format developed by Research Information Systems (known as .RIS file extension—a general file format for bibliographic data) that enables citation programs to exchange data were downloaded from online databases consisting of IEEE, Science Direct and Research Gate, while appropriate publications for current subject where selected to be a part of the analyzed data that composes the results in
Figure 1.
When it comes to extending the scientific knowledge of the concluded and published research regarding more or less popular applications that rely on gadolinium (Gd), one important aspect is to focus on both experimental and analytical considerations, as the novelty of the results may push further the technological advancement, especially since the performance that such materials can offer is not sufficiently debated in relation to the large number of possible applications.
This paper is structured in four parts:
The introduction presents a brief history of the gadolinium and its applications and a visualization of a bibliometric network focusing over the time evolution on the subject of the gadolinium motor.
The second part consists in presenting a variant of the gadolinium motor and its detailed elements and its electrical configuration.
The third part highlights the results comprising the analysis conditions, the simulation of the physical model in Altair Flux software environment and the generated magnetic field distribution.
The last part includes the conclusions and further directions of this research and its main findings regarding the gadolinium motor.
The simulation analyzed the magnetic phenomena between permanent magnets and gadolinium pills, the importance being the value of the driving force depending on the constructive characteristics (the value of the distance between permanent magnets and rotor, the size of gadolinium pellets, their number, rotor diameter).
Practical experiments have shown that it is not enough to know the value of the force because the speed is influenced by the frictional forces in the bearings and at the level of the cold source (the cold source is made by a fluid flow that washes the lower part of the rotor). At the same time, the speed is influenced by the strong torque.
The mathematical relationship obtained in the ideal version (without friction) and in no-load operation is therefore not relevant, which is why, for each practical situation, it is recommended to dimension the temperature sources, the motor geometry given the magnetic field of the permanent magnets, the distance between the magnets and the rotor) and the constants of the control function.
2. Motor Construction
2.1. Motor Configuration
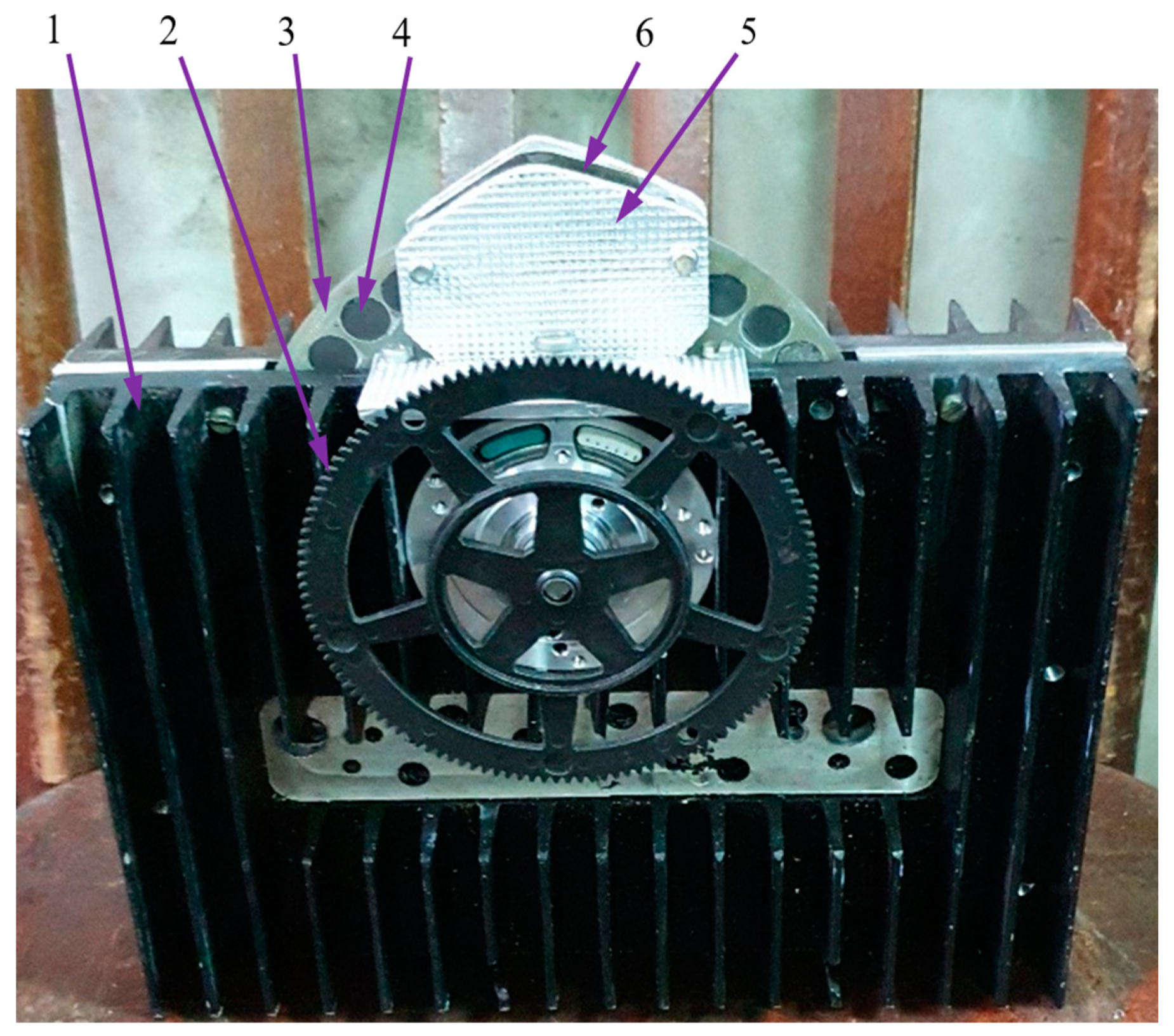
Operation of the gadolinium motor shown in
Figure 2 it is a system made of an assembly of two permanent magnets (6), arranged in diametrically opposite positions. Through the middle area of the magnetic system occurs the rotational movement of the rotor whose central shaft is inserted into sliding bearings which, in turn, are inserted into the central area of the aluminum radiators (1).
The rotor, in the form of a disc (3) made of electrical insulating material, it has on its circumference, gadolinium tablets (4), arranged equidistantly and passing through the magnetic field of permanent magnets (5).
The rotor starts to show a rotational motion when a temperature difference occurs between the cold and the hot source, a temperature range that will include the Curie temperature of the gadolinium [
1,
23,
24,
25].
The rotor, in rotational motion, causes the gadolinium tablets to enter the cooled chamber in which they pass into the ferromagnetic field. When the gadolinium pills reach the area of the heat source consisting of two electrical resistors, the gadolinium pills pass into the paramagnetic field. At this point, the rotor is printed with a rotational impulse due to the magnetic force of attraction excited on the gadolinium pills in the area adjacent to those that have passed into the paramagnetic menu, this causing the rotor to show a continuous rotational motion [
1,
23,
24,
25].
The experimental stand highlights the operating principle of the machines based on thermo-magneto-mechanical conversion. It consists of the basic elements necessary for the operation of a motor of this category: cold source, hot source and magnetic field source [
1].
2.2. Digital System Description
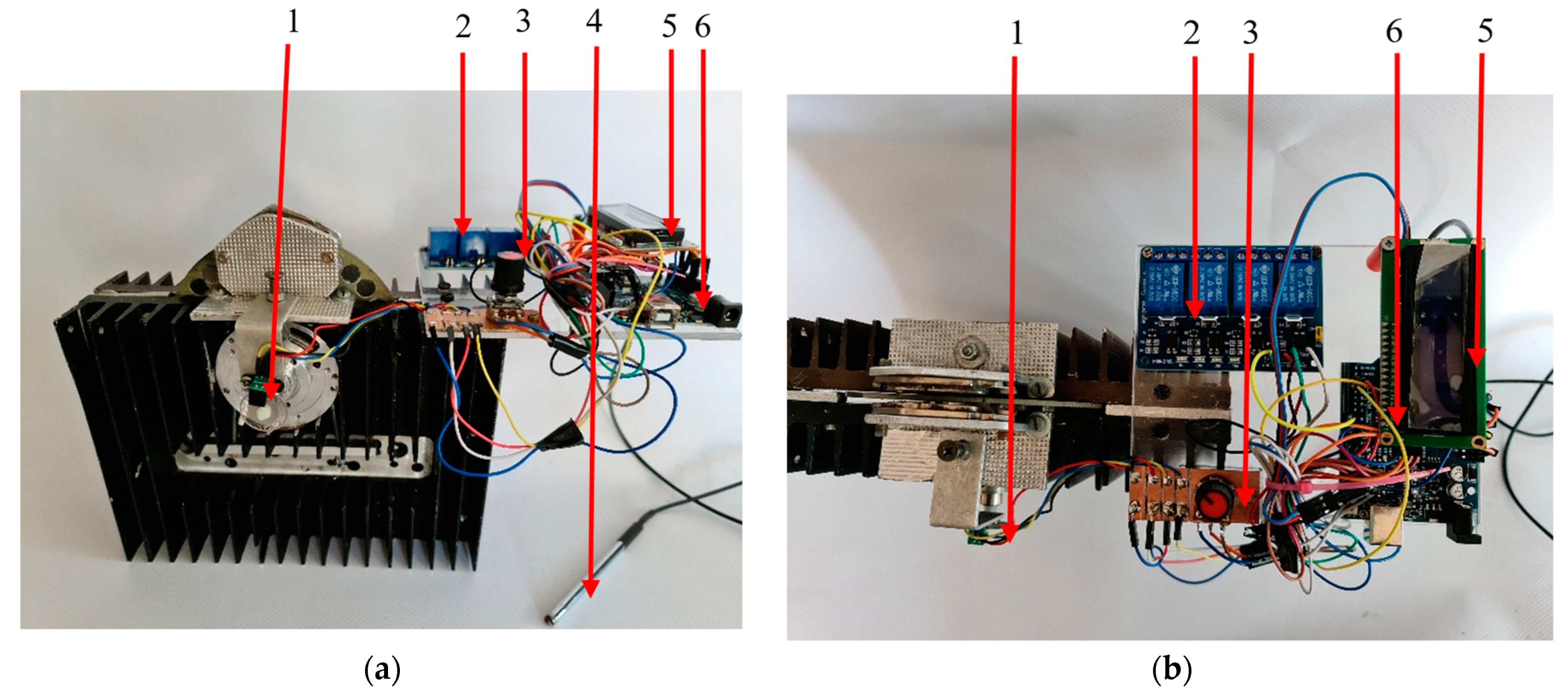
On the experimental model of the gadolinium motor, it is built as a digital system (shown in
Figure 3) with the help of a programmable microcontroller (6), which makes it possible to control the speed according to the two temperatures (cold environment and warm environment).
The experimental stand consists of a programmable microsystem (6), which controls through the relay module (2) four voltage steps and supplies the ventilation system with hot air. Depending on the motor speed that is measured using a speed sensor (1), one of the steps will be coupled so that the temperature of the heated environment makes it possible to rotate the motor at the preset speed adjusted by the potentiometer (3). The temperature of the heated environment and the speed are displayed by means of a digital display (5) positioned above the control system. The temperature value is taken by means of a sensor (4) positioned near the gadolinium tablets.
2.3. Electrical Configuration
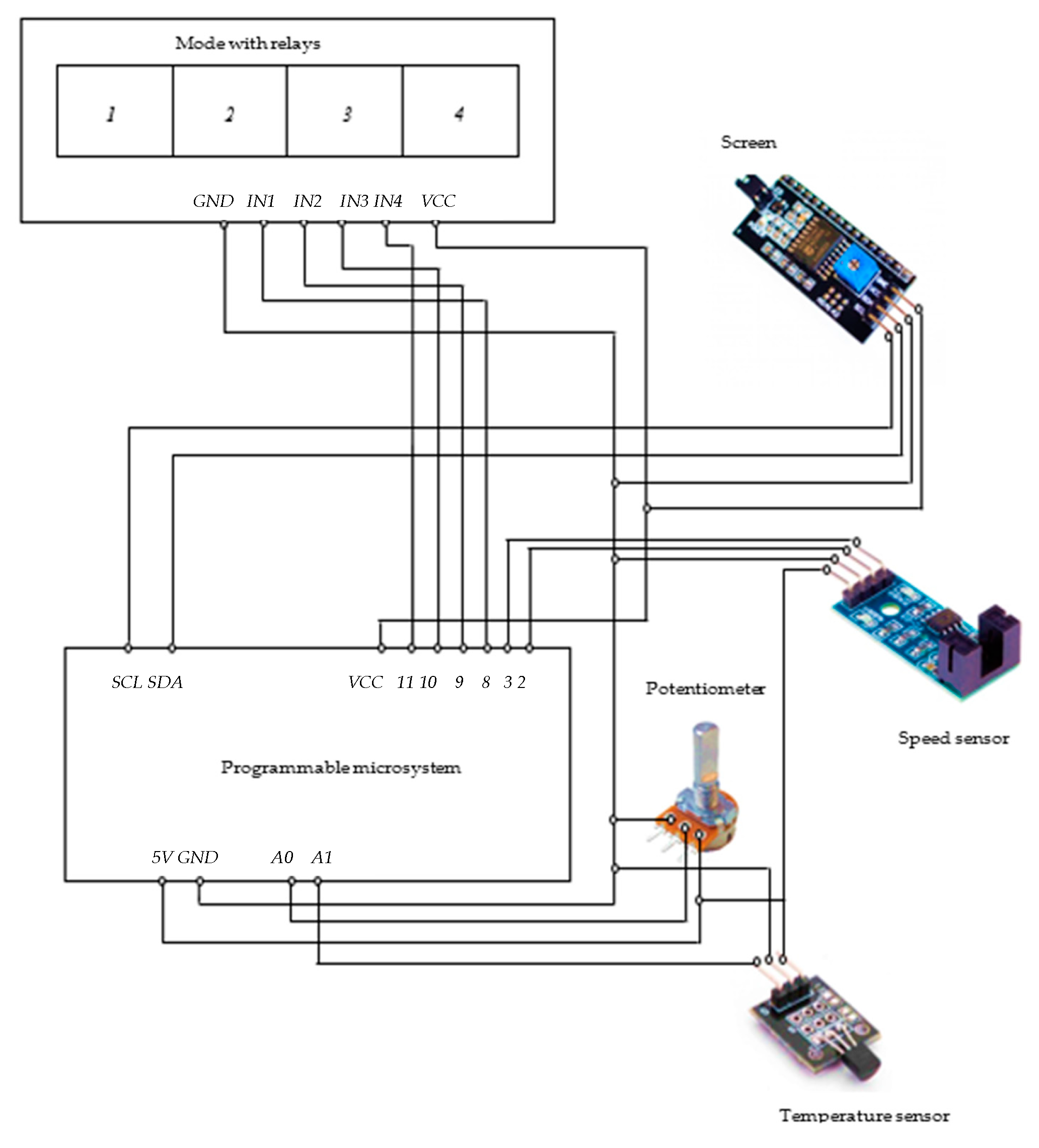
In
Figure 4 is shown the wiring diagram consisting of a programmable Microsystem and a relay module that controls the hot air ventilation system.
Depending on the motor speed that is monitored by the speed sensor, the supply voltage of the electrical resistor is changed so that the optimum temperature is maintained to preserve the speed of the rotor with gadolinium pills. When the rotor speed decreases, another temperature step is automatically connected by switching the control relays, which leads to a heating/cooling of the gadolinium (Gd) tablets.
2.4. Software Description
The software part that was used for the command and control of the gadolinium motor is composed of:
- ♦
the programmable microsystem determines the motor speed by processing the signals given by the speed sensor;
- ♦
the motor speed is compared to the pre-set value and depending on this, the operating step of the heated medium through which the gadolinium pills pass is changed;
- ♦
there are four heating actuation steps, each step being controlled by a relay;
- ♦
if the motor speed is lower than the prescribed speed, the control algorithm will cause the drive steps to increase to the maximum value;
- ♦
if when the motor speed is higher than the prescribed speed, the algorithm will cause the drive step of the heated medium to be reduced to the minimum value;
- ♦
changing the heating step will stabilize within a hysteresis range in case of a constant value for the prescribed speed.
2.5. Experimental Tests
Verifying the operating characteristics of the motor with gadolinium is an important step in determining its possible uses. While testing the gadolinium-based motor, it is considered to verify its behavior at the temperature variation of the two heat sources necessary for the transition of the active material from the rotor structure, respectively, gadolinium, from the ferromagnetic field to the paramagnetic field and vice-versa.
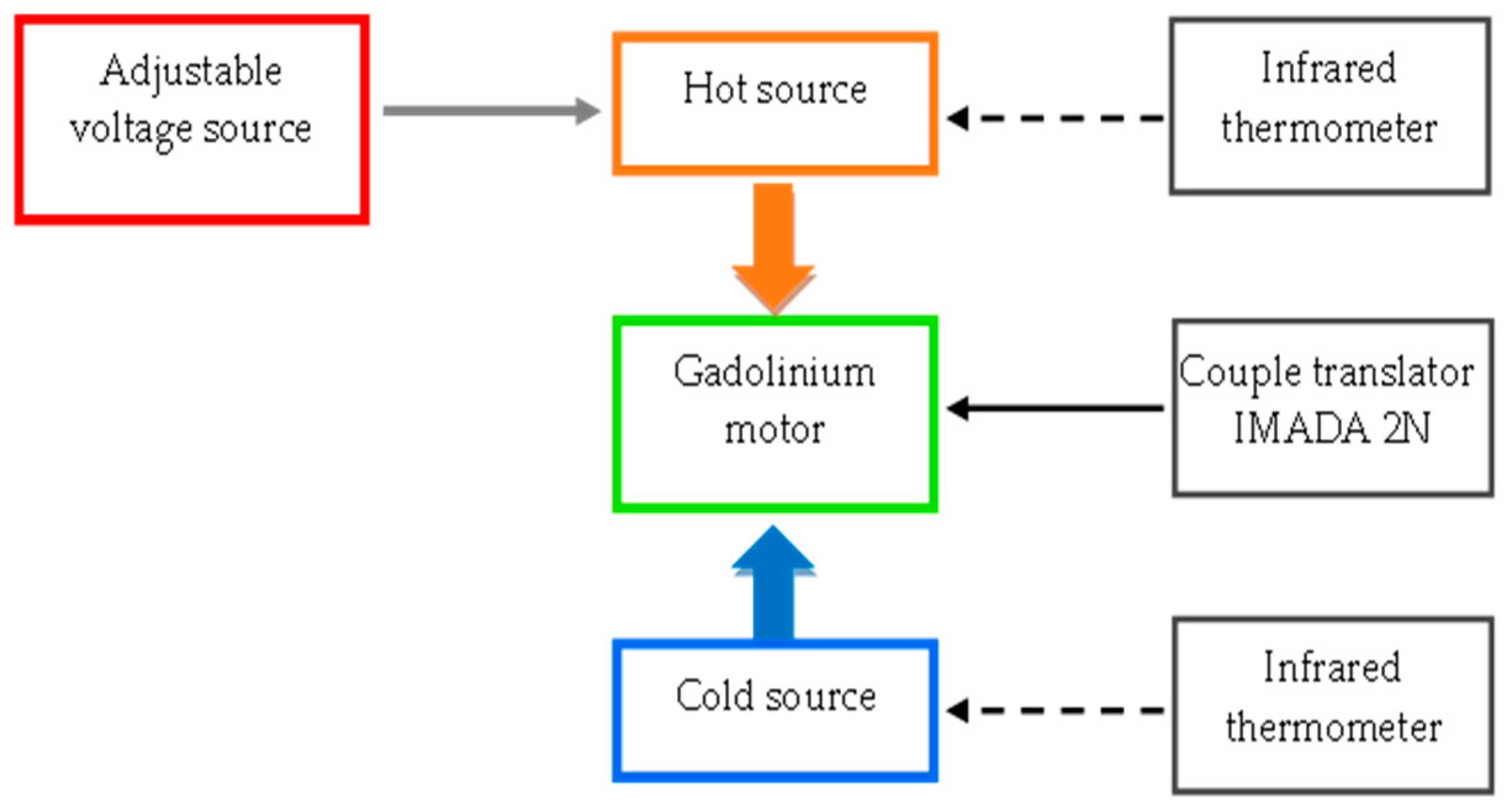
The gadolinium motor was tested by means of a test stand whose block diagram is shown in
Figure 5.
Therefore, from a functional point of view, the speed variation considering different temperatures of the two heat sources is of particular interest at this test stage. It should be noted that the first heat source is necessary to heat gadolinium tablets in the region chained by the magnetic field lines generated by permanent magnets in order to pass gadolinium from the ferromagnetic to paramagnetic field. The second source is necessary to restore the ferromagnetic properties of gadolinium tablets in the paramagnetic field. It is obvious that the variation of the temperatures of the two mentioned zones will influence the motor speed with gadolinium.
The heat source that cancels the balance of the rotor consists of two electrical resistors fixed on either side of it, near the two permanent magnets fixed in the same manner as the mentioned resistors. The two resistors were powered from an adjustable AC voltage source. The second source, with the role of bringing the gadolinium back into the ferromagnetic field, consists of a classic cooling circuit specific to refrigerators. The temperature of the hot source was measured with an infrared thermometer. In fact, the temperature of the gadolinium pills to which the material pros-girlfriends were modified by heating so that they pass into the paramagnetic domain was measured. The temperature of the cold source was measured using the same type of thermometer. The speed of the gadolinium motor, when idle, was measured with a non-contact numeric tachometer.
2.5.1. Case Study 1
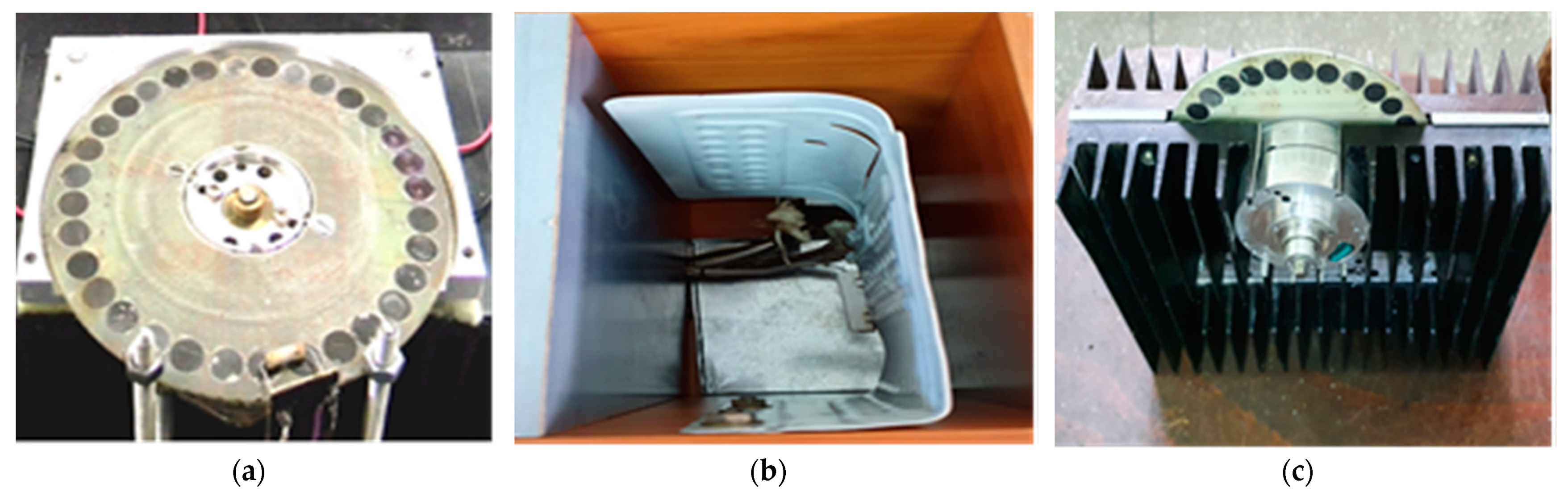
In
Figure 6a can be seen details of the rotor construction and the position of the electrical resistance relative to the gadolinium tablets. The cold source is represented by a classic compressor-type air cooling system [
1], shown in
Figure 6b.
The experimental stand made presents the principle of a thermo-magneto-mechanical conversion-based motor, as it is made of the following elements: hot source, cold source and magnetic field source [
1].
2.5.2. Case Study 2
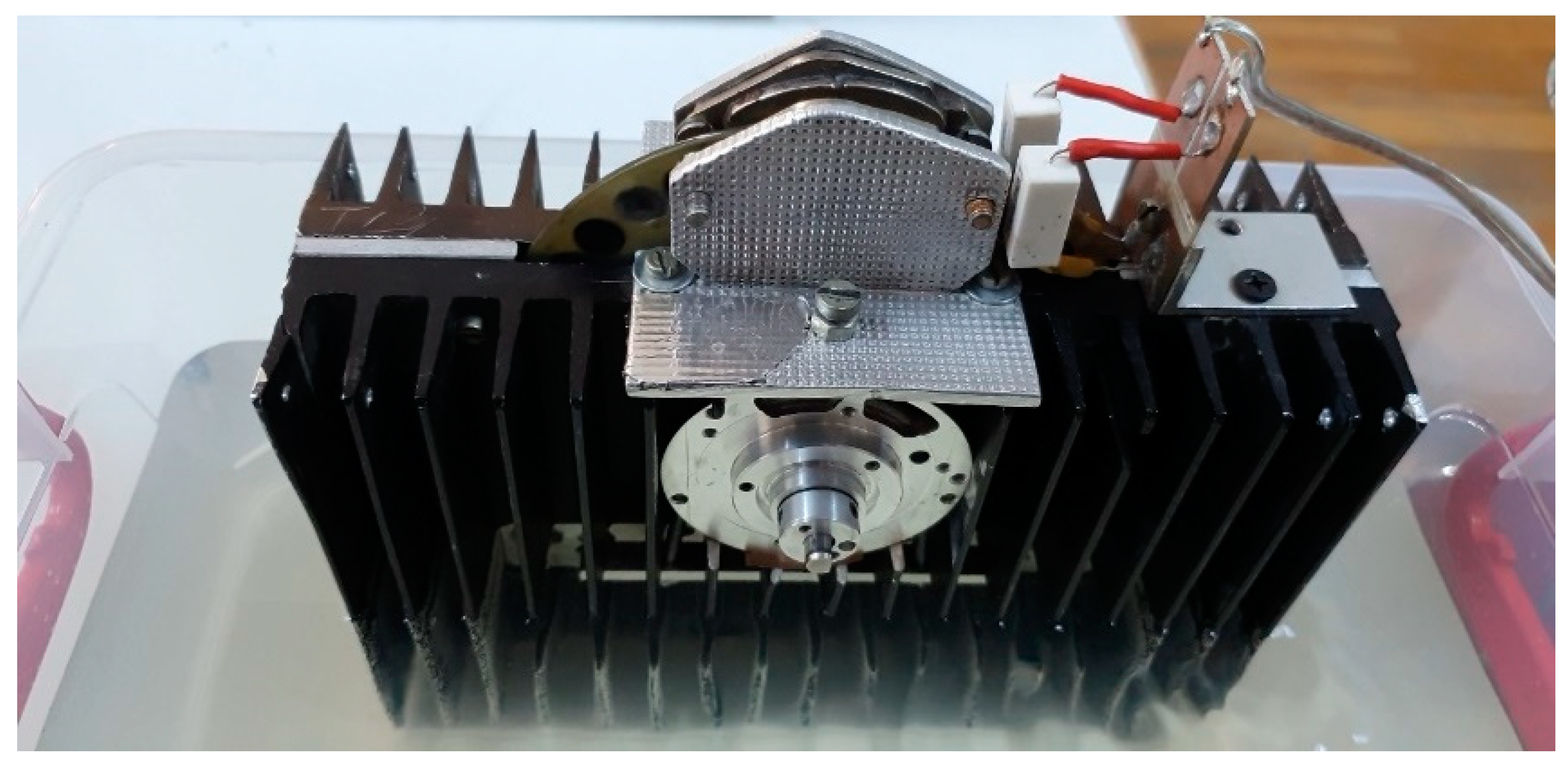
Another solution for changing the magnetic properties of gadolinium pills can be represented by the use of cooled water using a classic system, as shown in
Figure 7, consisting of a picture of the gadolinium motor positioned in a vessel in which a certain amount of cold water is located.
The main purpose of the experimental study is to highlight the influence of the water level in the vessel, on the motor speed with gadolinium. In this regard, four different levels of immersion will be considered. Thus, they will be cooled by immersing only part of the gadolinium pills, their number being different depending on the water level adopted in the experimental test. Obviously, the temperatures of the two sources will determine the final value of the speed, also taking into account the number of gadolinium pills cooled simultaneously.
2.5.3. Case Study 3
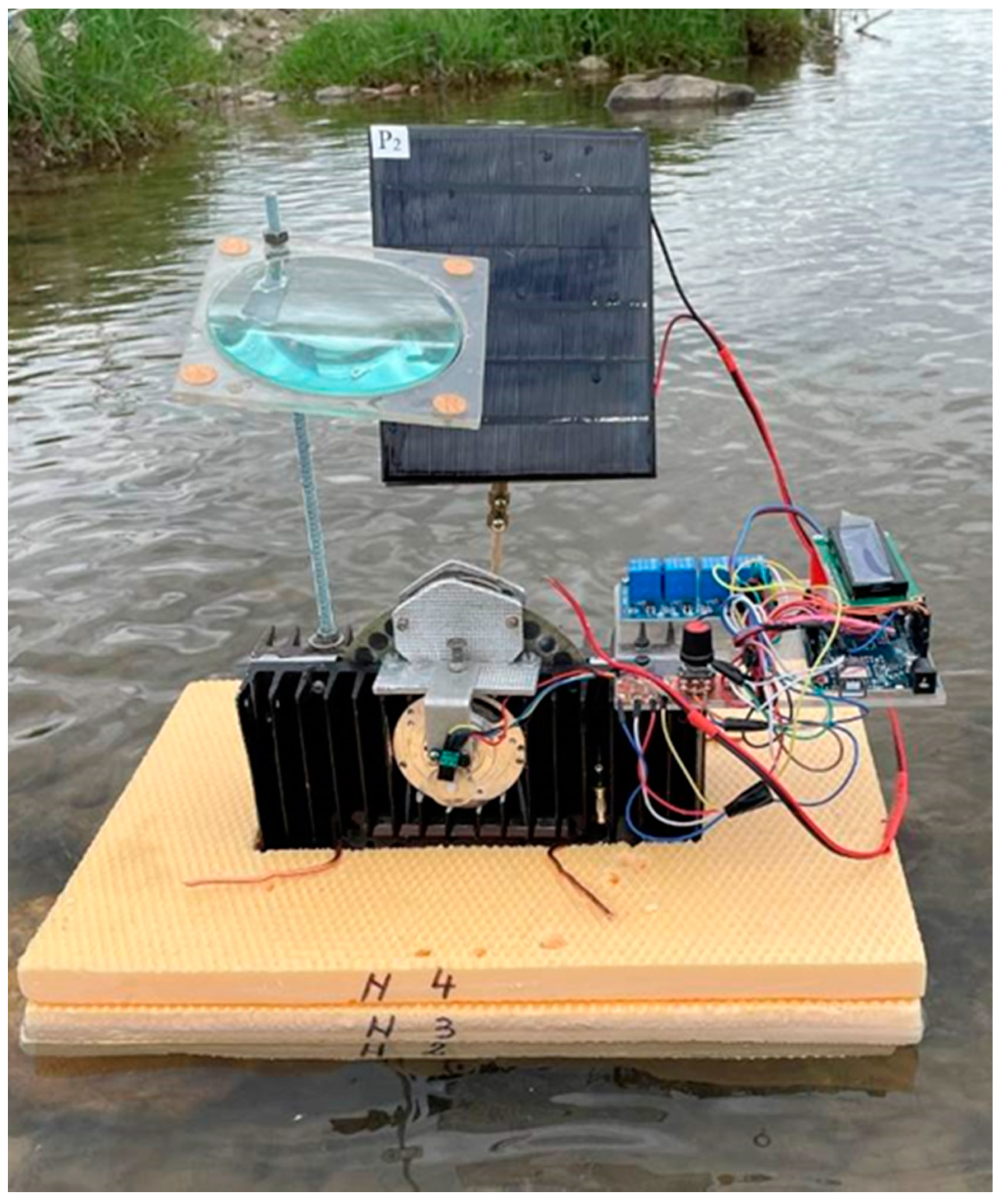
In
Figure 8 an image of the experimental model of the gadolinium motor positioned in a river is shown, in which there is the possibility to control the level of immersion (level 1—20 mm, level 2—40 mm; level 3—60 mm; level 4—80 mm) of gadolinium pills in the water, with the help of the four floating plates (extruded polystyrene).
Heating gadolinium pills is completed by means of a magnifying glass which captures sunlight concentrating it to heat the gadolinium pills. In order to power the programmable microsystem, it is used a photovoltaic panel that allows us to monitor the motor parameters on the display of the stand.
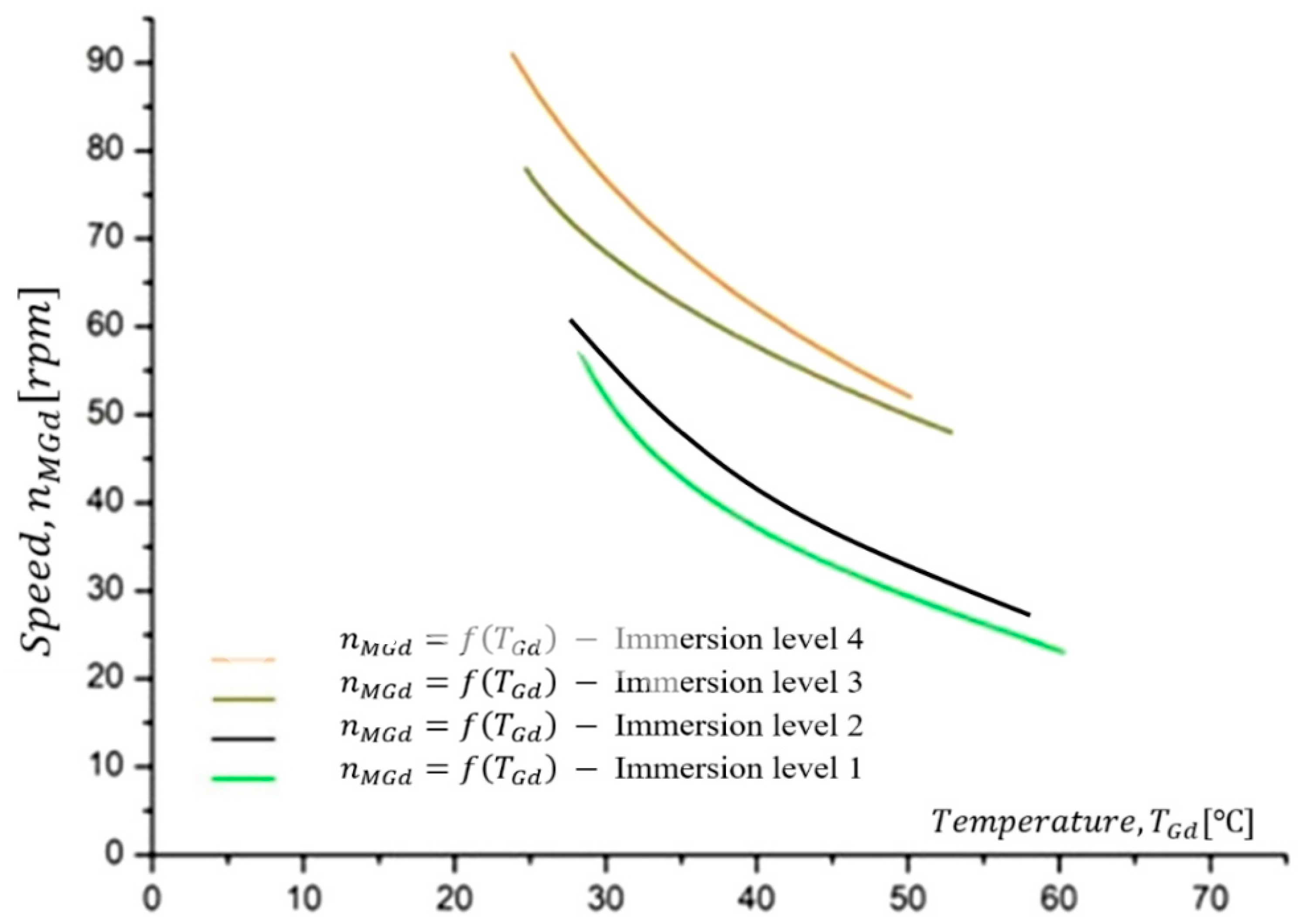
The last level of immersion, considered in the experimental study, involves the immersion of 12 gadolinium pills in the volume of water that ensures their cooling, respectively, the passage into the ferromagnetic field. The conclusions based on the results obtained are no different from the previous ones. Additionally, in this case, a decrease in motor speed (nMGd) occurs starting from n = 91 rpm and reaching n = 52 rpm.
Following the analysis of the results obtained by parameterizing the water level that contains a certain number of gadolinium pills, it can be stated that, the present speed a decreasing allure, a fact found by increasing the temperatures: temperature of Gadolinium (TGd) and temperature of the rotor (Tr) water in the ranges of variation. Moreover, immersion in water of a larger number of gadolinium pills, leads to increased motor speed.
The experimental tests were performed in the laboratory on a prototype engine made by the research team. The technical characteristics of such a motor may vary depending on the desired application.
Figure 9 shows the speed of the motor at the temperature variation of the hot source, considering that the temperature of the cold source is constant, but the number of gadolinium pills immersed in the fluid that ensures the cold source differs depending on the level of immersion.
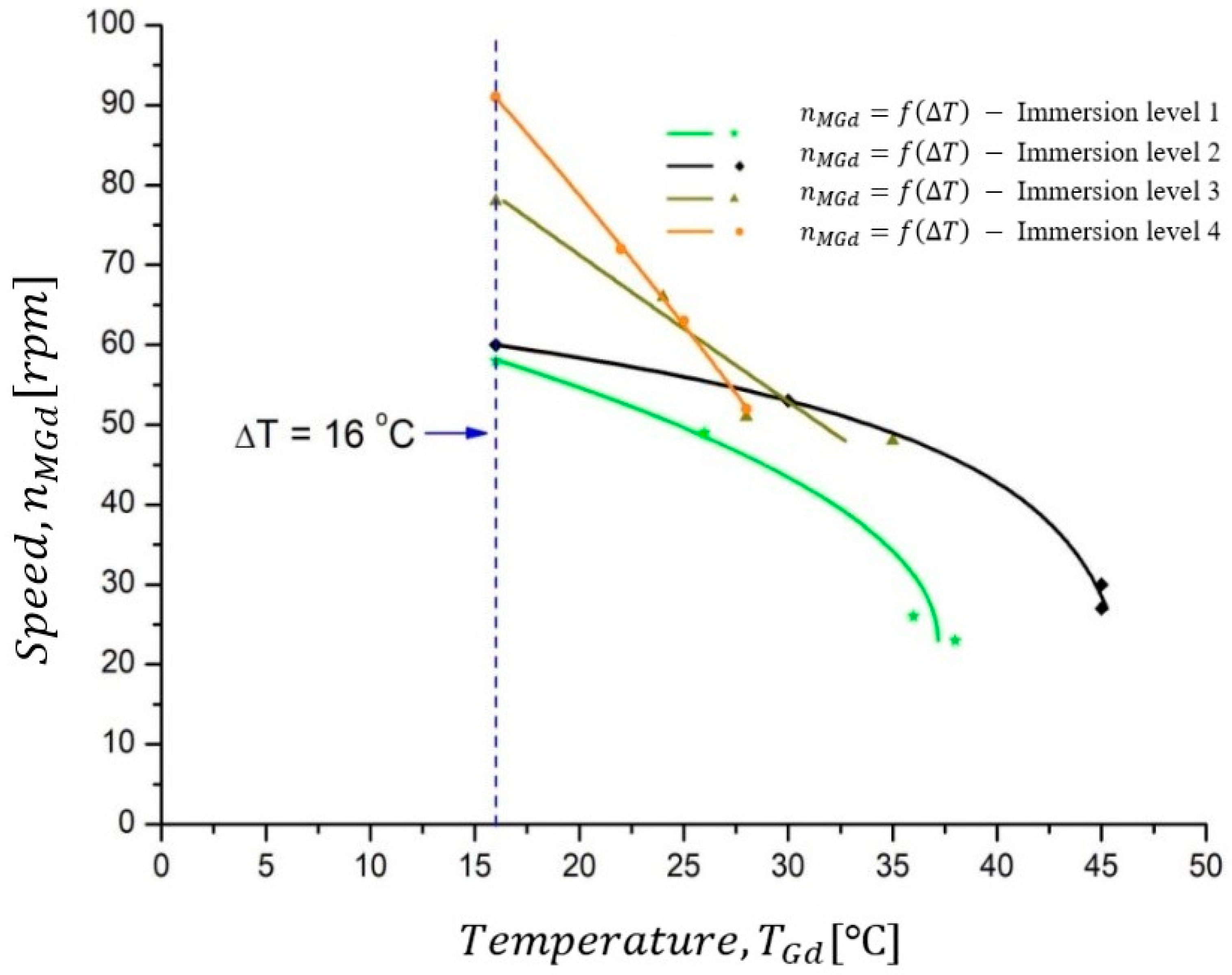
Figure 10 shows the rotational speed of the motor depending on the temperature difference between the hot source and the cold source, both of which may vary within the required limits. Due to the fact that gadolinium pills must pass successively between the two heat sources between the states of paramagnetism and ferromagnetism, we need the temperature of the entire material pill to vary on either side of the Curie Temperature value in a time of tens of seconds, so the heat sources must ensure this temperature variation in a short time. Experimentally it was determined that, for the tested prototype, the maximum speed can be obtained for a temperature difference of 16 degrees. For a larger temperature difference between the two heat sources, the speed decreases due to the transition of the gadolinium mass on either side of the Curie Temperature is more difficult (cooling is more difficult).
The variation in the motor speed with gadolinium temperature over time, considering different levels of water necessary for cooling gadolinium pills, is shown in
Figure 9 the increase in the cooling water level leads to an increase in motor speed but the characteristics are less rigid for higher values.
If an analysis of the behavior of the motor is carried out, taking into account the temperature difference ∆T between the two zones, it reveals similar conclusions, with small differences in the allure of the speed characteristics. Regardless of the level of immersion adopted, the speed registers a decrease, and is shown in
Figure 10. For this experimental study, the initial temperature difference (∆T) is considered the same each time, respectively, ΔT = 16 °C.
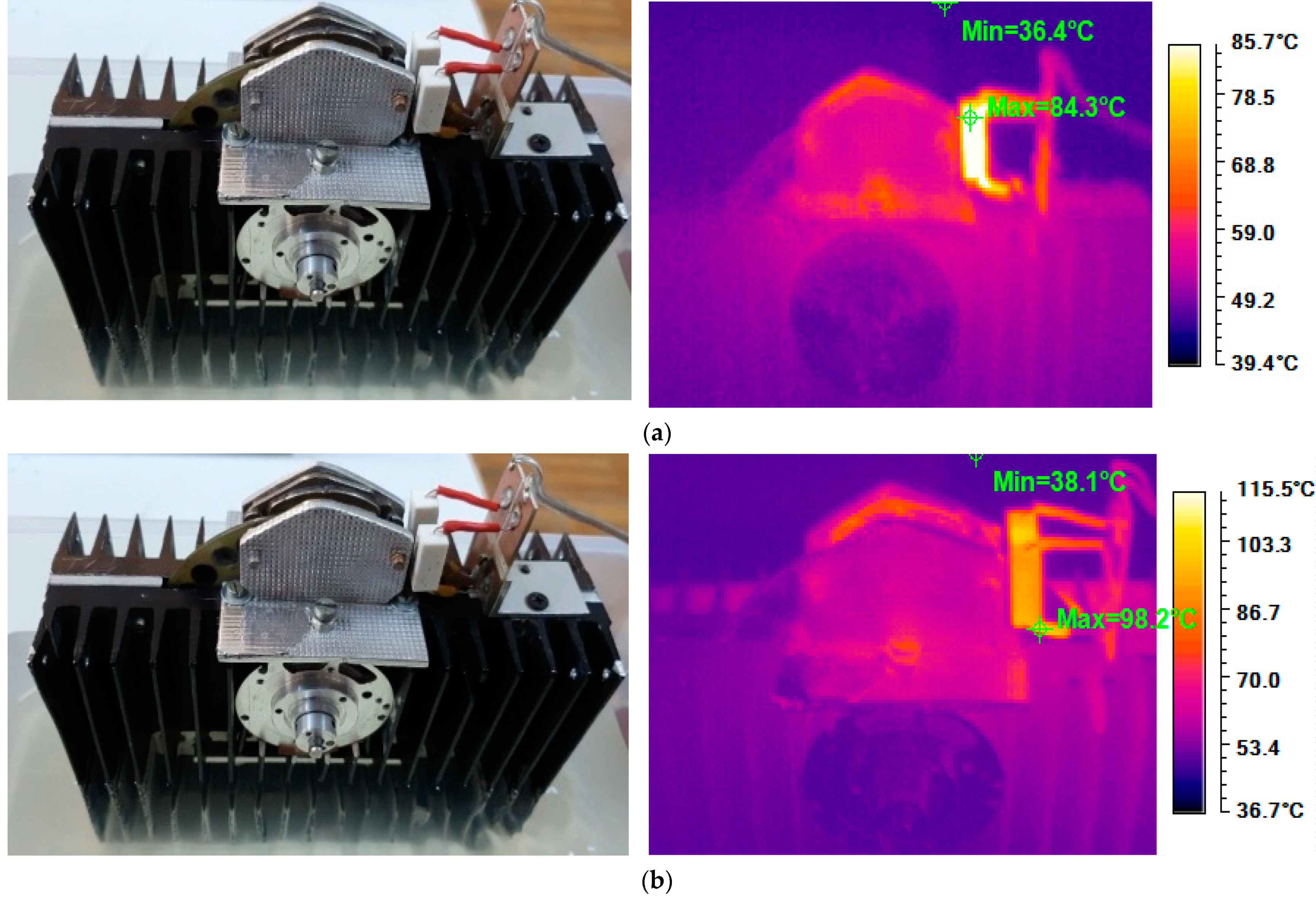
To illustrate the operation of the heat source that performs the heating of gadolinium pills in the area of action of the magnetic field determined by the two permanent magnets, an easier four thermo-vision camera was used. This was used for non-contact scanning of the temperature of the hot source. In the following thermographic images (
Figure 11) are presented that highlight two distinct steps in the operation of the heat source consisting of two electrical resistors supplied with adjustable alternating voltage.
4. Analytical Results Provided by Altair Flux Software Environment
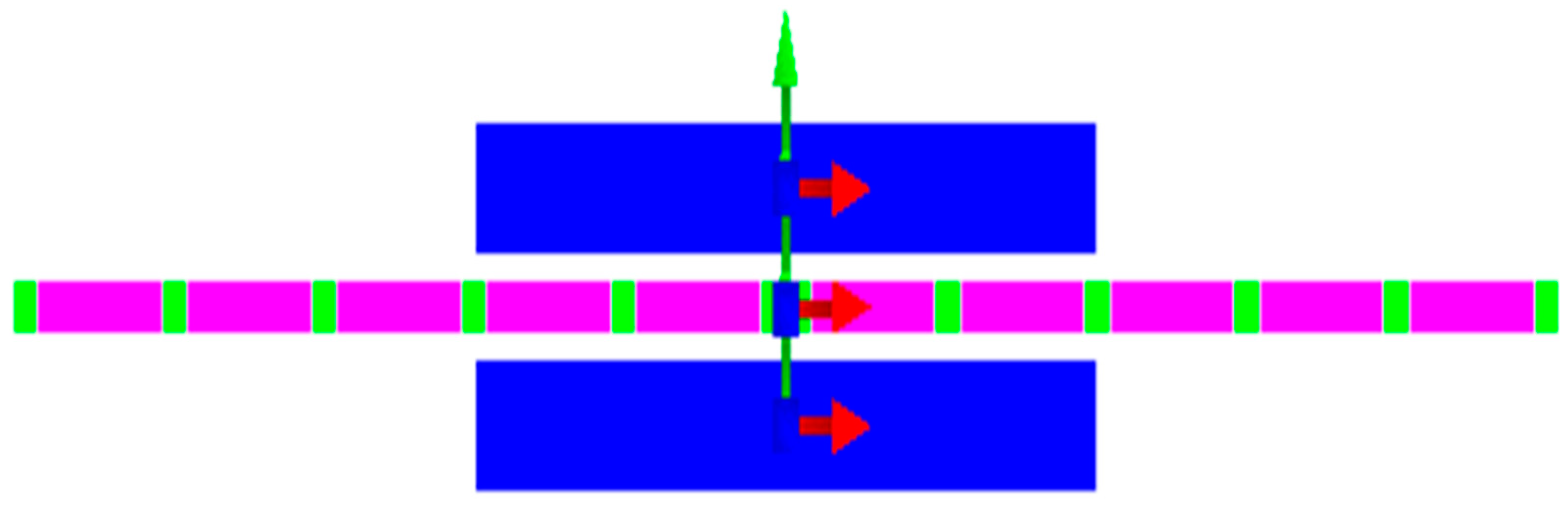
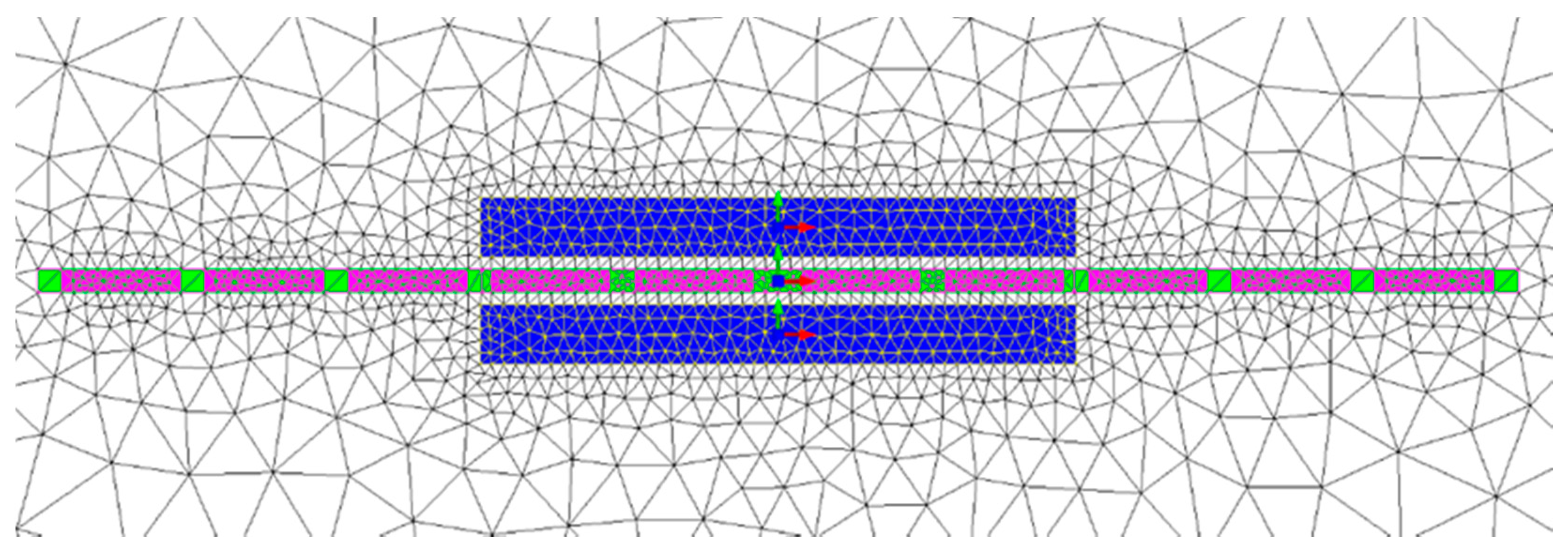
The initial scenario proposed for solving proposes the variation of the two geometric parameters in the areas presented in
Table 1 as well as the permeability of gadolinium. For information purposes, the following presents the distribution of the magnetic field lines at the variation of the distance between the permanent magnets and the permeability, for the situation where only three cylindrical elements of gadolinium are used in the rotor structure. In
Figure 15 the results of the simulation shall be presented when the distance between the permanent magnets is equal to the minimum value (4 mm) and the permeability is maximum (in the ferromagnetic field) and then when the distance is maximum (14 mm) and the same permeability value. In
Figure 16 the same situations are illustrated, but the permeability of the gadolinium is in the paramagnetic field. The display of graphical post-processing allows the user to verify that the problem is correctly formulated and emphasizes both the areas of concentration of the magnetic field and its direction [
26].
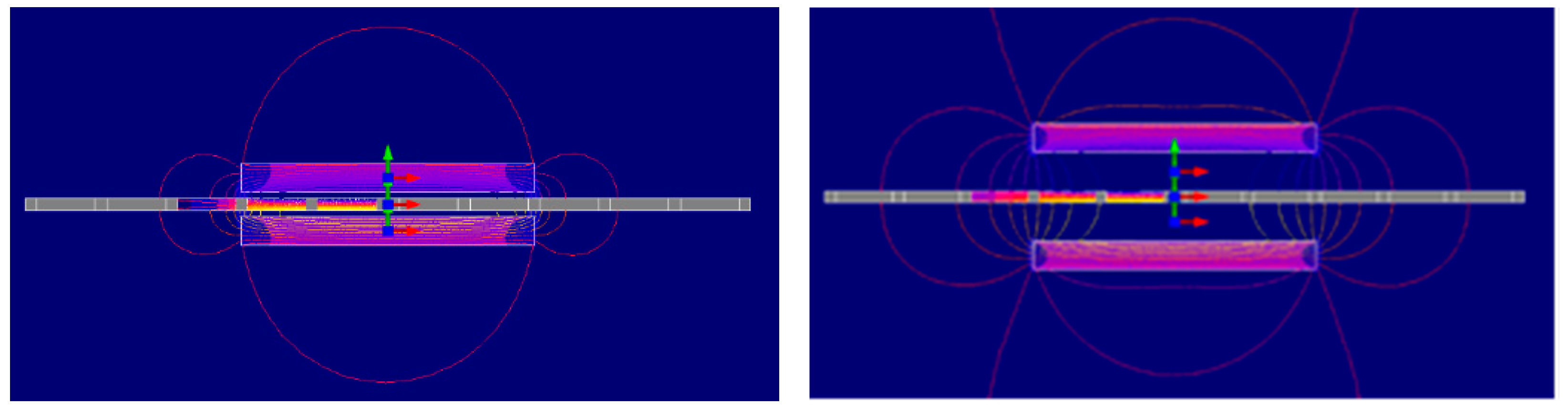
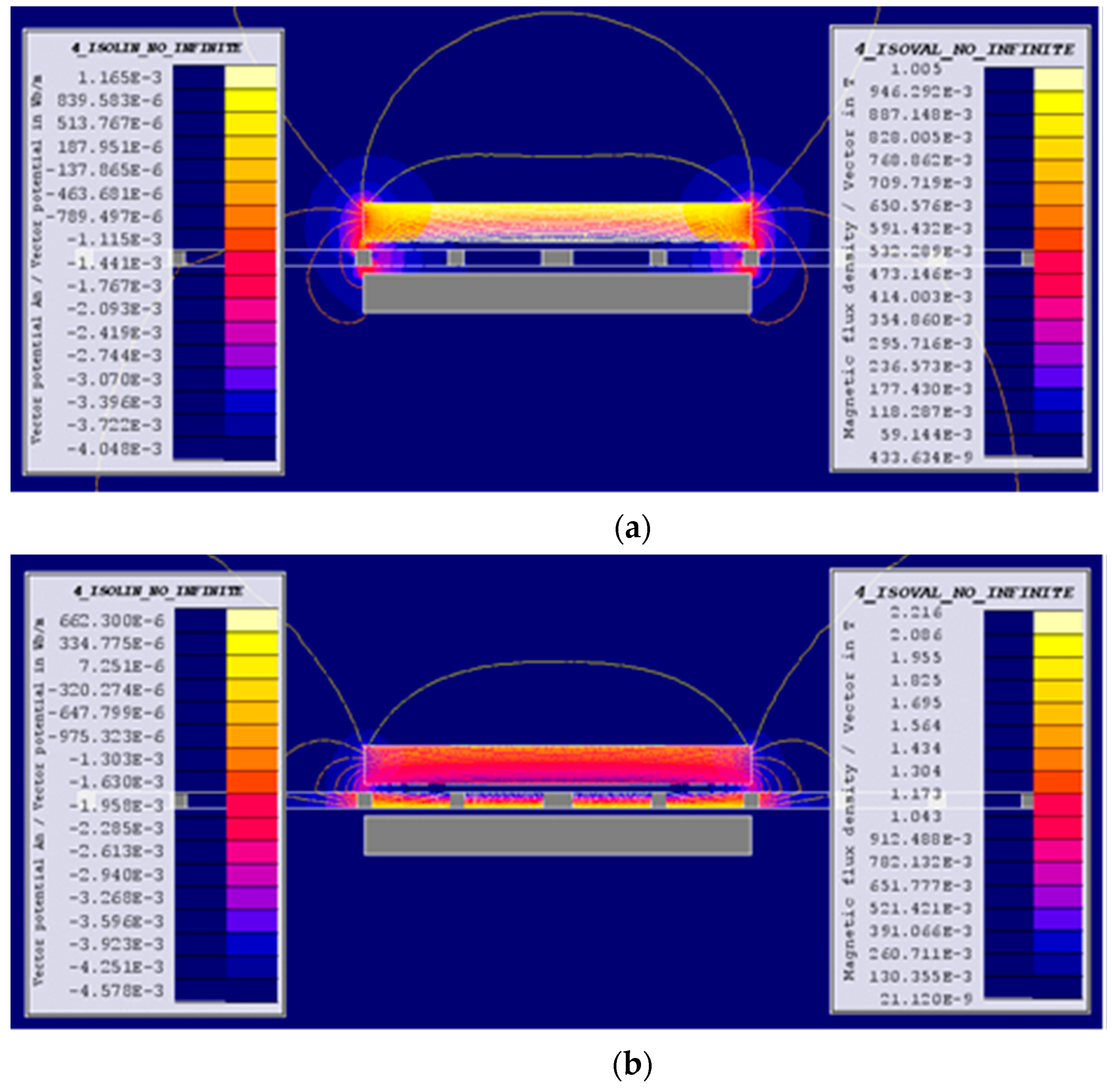
The first results show the distribution of magnetic flux density and field lines in the gadolinium rotor area in the paramagnetic and ferromagnetic field, respectively. Considering the permeability of gadolinium in the paramagnetic field and ulterior in the ferromagnetic field, the images shown in
Figure 17a in these situations, the rotor thickness is the initial (2 mm) and the distance between the permanent magnets is the minimum required for the experimental model (4 mm).
In
Figure 17b the same poses are presented but with a distance between the permanent magnets equal to 14 mm.
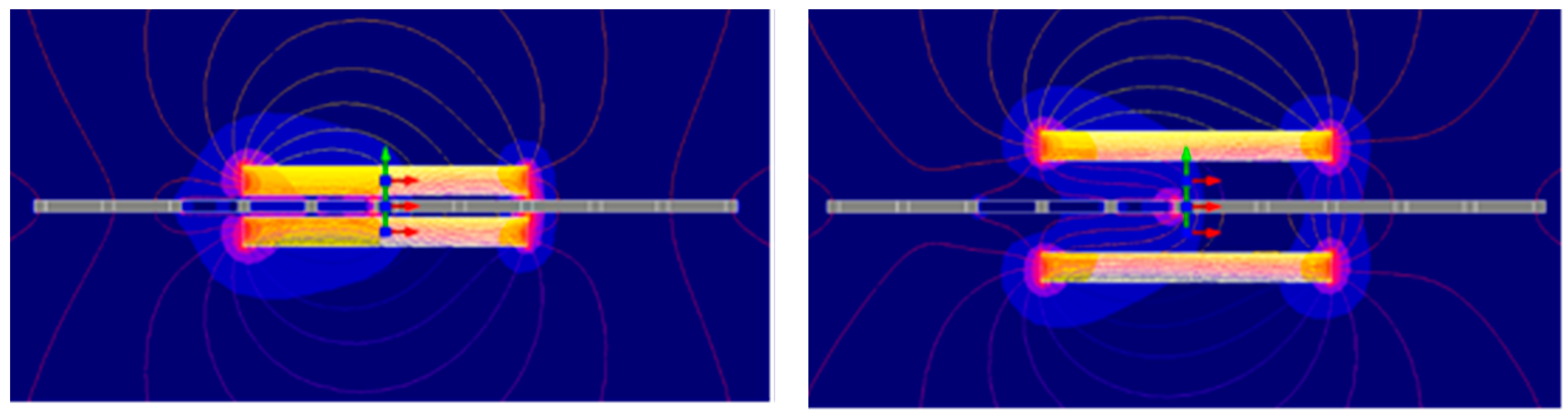
Increasing the thickness of the rotor also implies the proper spacing of permanent magnets. Gadolinium active elements in the paramagnetic and ferromagnetic field, respectively, under the influence of the magnetic field produced by the upper permanent magnet, can be analyzed in
Figure 18 in terms of magnetic field density distribution.
As stated on several occasions, the size of the magnetic force of attraction is of interest. The greater the magnetic force of attraction between the two constructive elements (stator and rotor) the better the gadolinium motor will behave under load conditions.
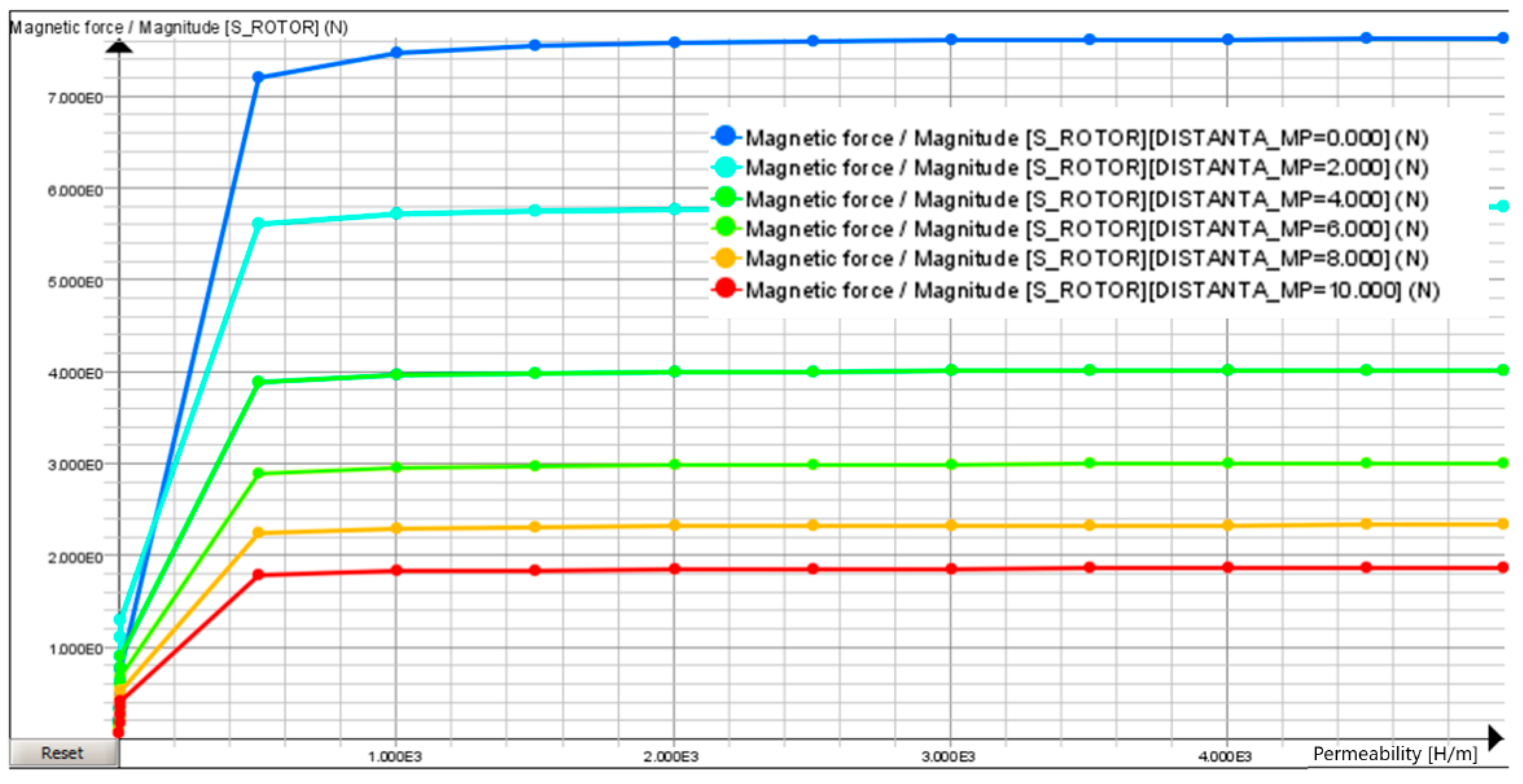
4.1. Variation of the Force of Attraction When the Distance between the Permanent Magnets Increases and the Permeability of Gadolinium Changes
In
Figure 19 can be observed the variation of the force of attraction when the distance between the permanent magnets increases and the permeability of gadolinium changes in the range considered. The increase in the force of attraction is noted with increasing permeability and its decrease as the magnetic field is diminished (increasing the distance between permanent magnets).
The maximum value of the attraction force is 7.626 N, obtained for the DISTANCE_MP = 4 mm, THICKNESS_ROTOR = 2 mm and relative permeability above the value of 2000. In
Figure 20, the same results are presented in the form of 2D features.
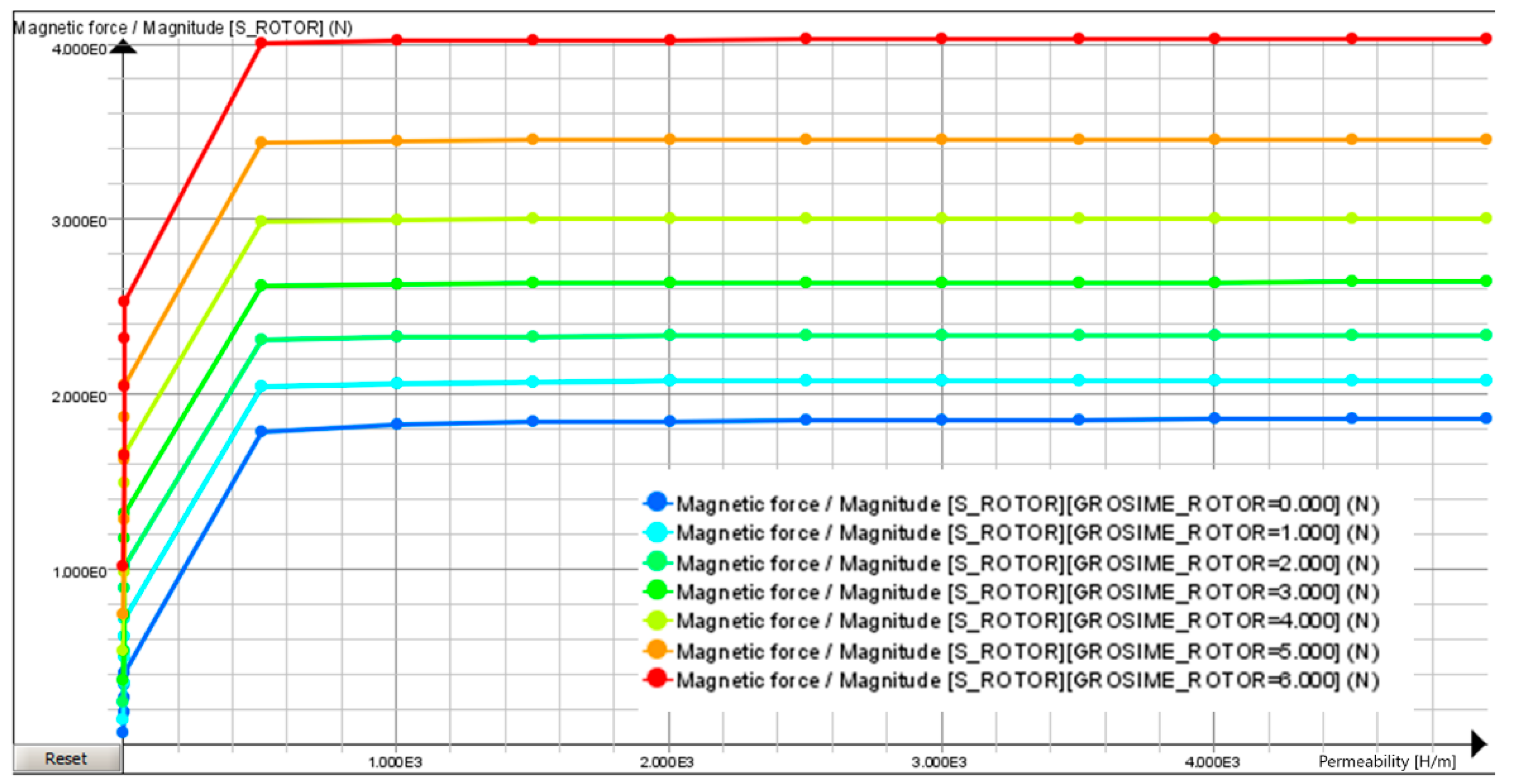
4.2. Value of the Attraction Force Decreases to the Value of 4.028 N by Adopting the Maximum Distance between the Permanent Magnets and the Variable Rotor Thickness
The value of the attraction force decreases to the value of 4.028 N by adopting the maximum distance between the permanent magnets (DISTANCE_MP = 14 mm) and the variable rotor thickness (THICKNESS_ROTOR = 2–8 mm), even if the permittivity increases. This can be seen in the 3D representation in
Figure 21 Features in 2D format can be viewed in
Figure 22.
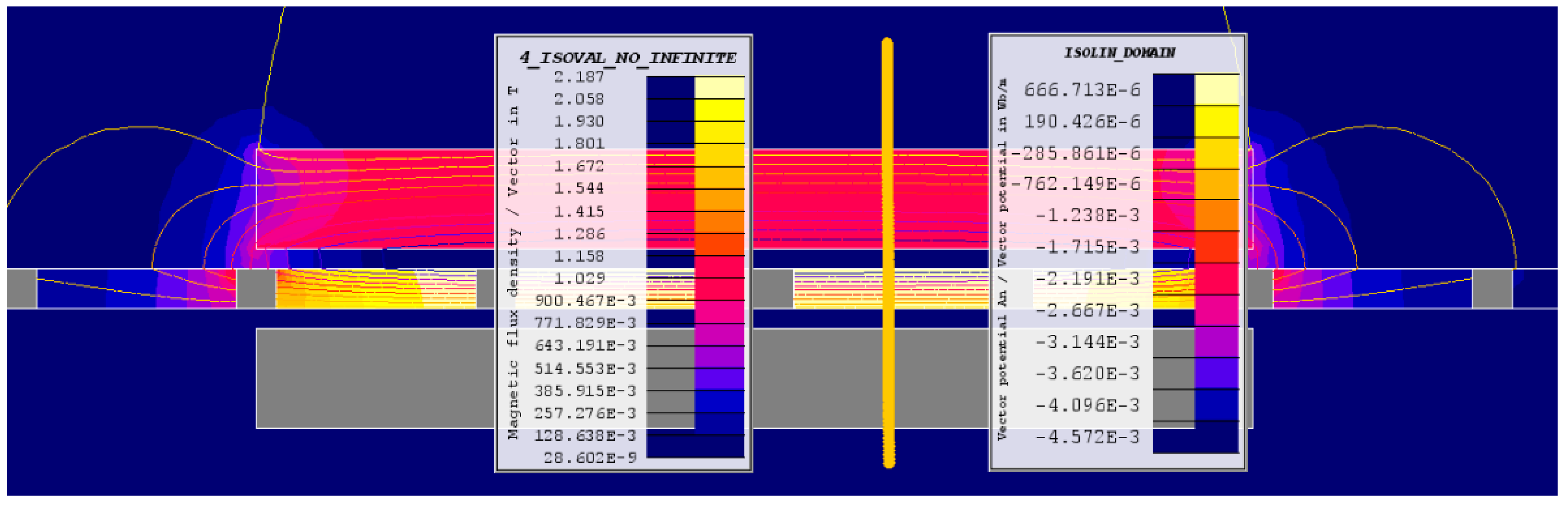
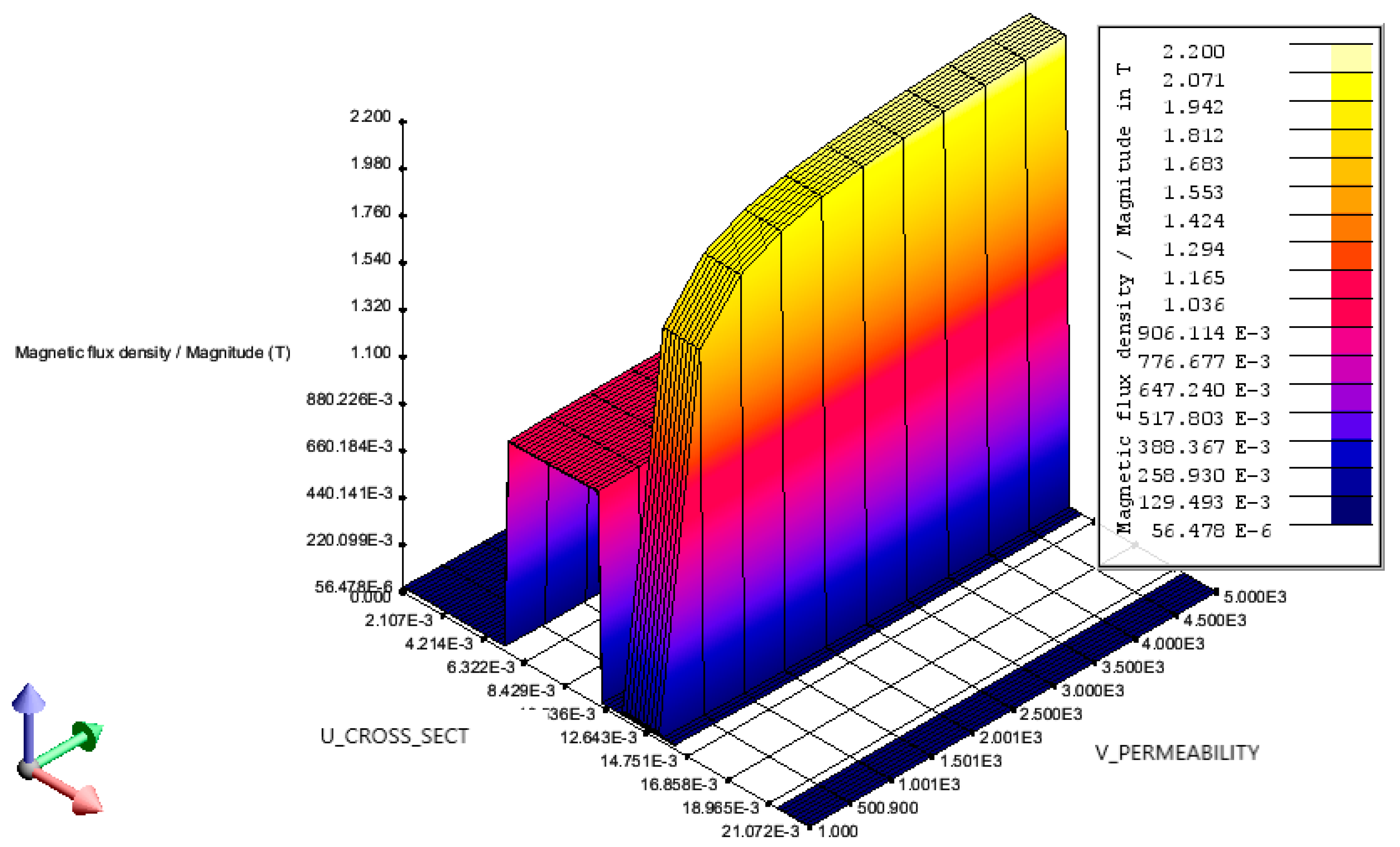
The variation of magnetic flux density was checked in a cross-section of the gadolinium motor, according to
Figure 23 this route includes the upper permanent magnet, the gap, the cylindrical element of gadolinium and the lower permanent magnet that is considered inactive. The 3D representation of the variation of the magnetic flux density on the mentioned route, at the variation of the permeability of the cylindrical elements of gadolinium, can be traced in
Figure 24.
In the case of the simulation, the values of the magnetic force appearing between the permanent magnets and the ferromagnetic material were determined according to the permanent characteristics used in the prototype, the distance between them and the rotor, the size of gadolinium pills and the number of gadolinium pills in the magnetic field. In the simulation, values were used which were then imposed on the experimental prototype. This magnetic force is the driving force, which will determine the rotational speed of the drive system. The rotation speed was determined experimentally in the laboratory in terms of minimizing friction and when the engine is idling to check that the simulation corresponds to real situations. The practical applications are different from those obtained in the laboratory.
5. Conclusions and Future Directions
Adjustment of the motor speed achieved can be undertaken by changing the temperature of one of the heat sources and ensuring optimal heat transfer at the rotor level. Increasing the speed can be undertaken by changing the temperature of the heat sources or by increasing the heat transfer, by ventilating the environment at their level.
The motor has a small gauge (rotor disk), which allows it to be used in narrow spaces, which are in high heat flow to facilitate heat transfer.
Simulation of the gadolinium motor was carried out in Altair Flux—2D software environment in the magnetostatic module. The geometry of the physical model has been simplified so that the results can be easily analyzed. In the simulation, a number of parameters, geometric and physical, were considered variables in order to obtain detailed results in relation to the value of the driving force at the level of gadolinium pills as well as to establish the optimal size for the motor gap.
For a constant value of the geometric parameter that establishes the distance between the permanent magnets, the attraction force increases at the level of the permanent magnets with the increase in the relative permeability of the material (Gd). As the distance from the permanent magnets increases there is a considerable decrease in it. The maximum value of the force of attraction, taking into account a minimum gap determined by the mechanical characteristics of the motor (1 mm) is 7.626 N. At the same time, it is found that when gadolinium passes into the ferromagnetic field (µr > 100), the force of attraction increases sharply, and the permeability variation in the specified field does not lead to a subsequent significant increase in the force of attraction.
Up to 5-fold increase in the size of the gap leads to a reduction in the force of attraction by about 76%.
The simulation data indicate that the forces occurring in the magnetic field of the permanent magnets are much higher than the friction forces in the rolling bearings of the rotor, which was also observed in the experimental testing of the made model, and emphasize that the gadolinium drive system, designed, manufactured and tested, can be successfully used in low-speed drives, where two optimal heat sources are available for operation, hot source using heat recovered from flue gases or technological steam, or in isolated areas where heat sources are taken from the environment in the form of streams of water and solar heat.
Adjusting the speed of rotation of the motor was carried out only by changing the temperature of the warm environment, constantly keeping the temperature of the cold environment. The digital system allows real-time display of the speed and temperature of the rotor in the hot environment, information that allows us to act on the temperature, so as to obtain the desired speed.
The study is not complete. We are in the stage of analyzing the real transfer function that will allow various practical applications. The research team is currently studying these drive systems and analyzing how engine geometry, frictional forces and shaft-resistant torque will influence engine speed. The role of the adjustment system is to compensate for these situations in practice by maintaining the rotation speed at a prescribed value [
26].



 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}