
Boundary-Adapted Numerical Modeling of Flow in a Hydrostatic Leadscrew


Abstract
1. Introduction
2. Materials and Methods
2.1. Construction of Helical Coordinate System Adapting to the Boundaries of the Flow Fields
2.2. Derivation of Reynolds Equation in Helical Coordinate System
2.3. Boundary Conditions of the Helical Flow Fields
2.4. Solution of Reynolds Equation Applicable to a Screw-Nut Pair
2.4.1. Discretization of Reynolds Equation
2.4.2. Solutions of Pressure and Flow
2.5. Solution of Static and Dynamic Characteristic Parameters
3. Results and Discussion
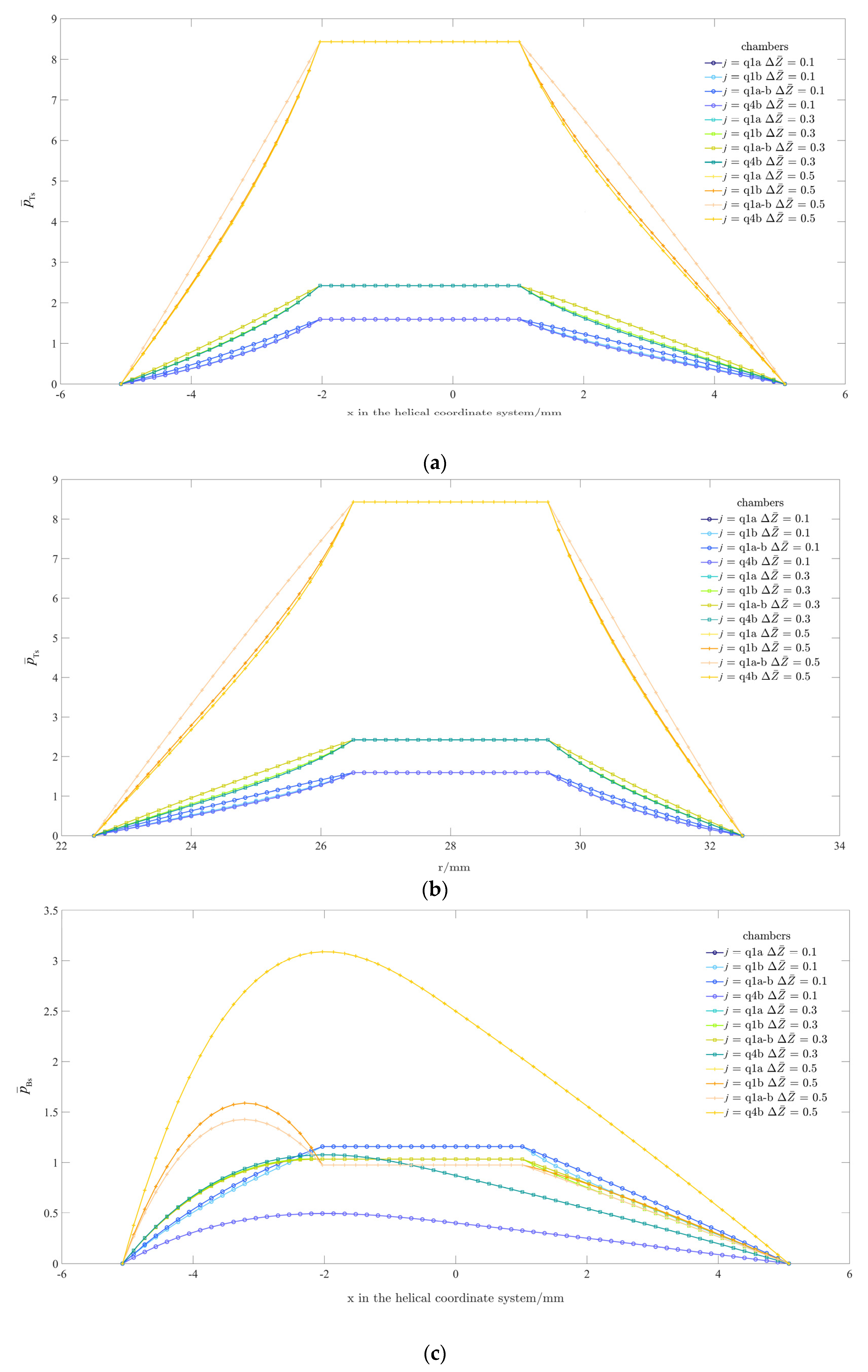
3.1. Flow-Field Pressure Analysis
3.2. Feasibility Evaluation Based on the Bearing Capacity
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| global coordinate system | |
| cylindrical coordinate system corresponding to | |
| local coordinate system on the nut | |
| / | follow-up coordinate system |
| / | helical coordinate system |
| unit vectors in the , and direction | |
| -coordinate in | |
| inner radius of the nut | |
| outer radius of the screw | |
| pitch radius of the gap fields | |
| inner radius of the chamber | |
| outer radius of the chamber | |
| curvature | |
| torsion | |
| dimensionless curvature | |
| dimensionless torsion | |
| pitch | |
| half of thread angle | |
| half of thread angle at | |
| lead angle at | |
| lead angle at | |
| lead angle at | |
| φ | half of thread angle of the normal section at |
| clearance thickness in the direction | |
| initial clearance thickness in the direction | |
| steady clearance thickness in the direction | |
| axial displacement of nut | |
| variation of | |
| steady component of | |
| disturbance component of | |
| axial displacement from the equilibrium position of the nut | |
| axial velocity of nut | |
| the change rate of | |
| angular speed of screw | |
| circular velocity of the screw at | |
| rotation angle of screw | |
| supply pressure | |
| () | unit discharge in the () direction |
| velocities of a fluid particle in the , and direction | |
| () | of the upper (lower) fields |
| velocities of a fluid particle in the , and direction | |
| relative velocity of a fluid particle | |
| following velocity of a fluid particle | |
| absolute velocity of a fluid particle | |
| the angle between and | |
| () | steady-state clearance thickness of the upper (lower) fields of the nut |
| () | transient clearance thickness of the upper (lower) fields of the nut |
| steady pressure | |
| first-order pressure disturbance | |
| second-order pressure disturbance | |
| () | steady pressure of the upper (lower) fields of the nut |
| () | first-order pressure disturbance of the upper (lower) fields of the nut |
| () | second-order pressure disturbance of the upper (lower) fields of the nut |
| bearing capacity | |
| axial stiffness coefficient | |
| axial damping coefficient |
References
- Wertwijn, G.; Kolarich, S. Selecting a hydrostatic lead screw. Power Transm. Des. 1967, 61, 9. [Google Scholar]
- Matataro, T.; Akira, Y.; Shunichi, K.; Katsuyuki, T. A Study on Hydrostatic Lead Screws (1st Report). J. Jpn. Soc. Precis. Eng. 1981, 47, 1504–1509. [Google Scholar]
- Matataro, T.; Akira, Y. A Study on Hydrostatic Lead Screws (2nd Report). J. Jpn. Soc. Precis. Eng. 1982, 48, 1341–1347. [Google Scholar]
- Satomi, T.; Yamamoto, A. Studies on the Aerostatic Lead Screws (1st Report). J. Jpn. Soc. Precis. Eng. 1984, 50, 975–980. [Google Scholar] [CrossRef][Green Version]
- Satomi, T.; Yamamoto, A. Studies on the Aerostatic Lead Screws (2nd Report). J. Jpn. Soc. Precis. Eng. 1985, 51, 1915–1920. [Google Scholar] [CrossRef]
- Zhao, P.; Satomi, T. Study on Aerostatic Lead Screw. J. Jpn. Soc. Precis. Eng. 2007, 73, 1350–1355. [Google Scholar] [CrossRef][Green Version]
- Shen, T. Research on Aerostatic Leading Screw. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2008. [Google Scholar]
- Luo, S.; Zhao, S. Liquid Nut for High Speed Transmission System. Mach. Tool Hydraul. 2008, 36, 327–328. [Google Scholar]
- Zhong, W. Performance Research on Hydrostatic Lead Screws with Spool-Type Restrictors. Master’s Thesis, Shandong University, Jinan, China, 2017. [Google Scholar]
- Xin, Z. Design and Dynamic Analysis of Full Static Pressure Double Drive Screw Transmission System. Master’s Thesis, Shandong University, Jinan, China, 2020. [Google Scholar]
- El-Sayed, H.R.; Khataan, H. The exact performance of externally pressurized power screws. Wear 1976, 30, 237–247. [Google Scholar] [CrossRef]
- El-Sayed, H.R.; Khataan, H. The running performance of externally pressurized power screws. Wear 1976, 39, 285–306. [Google Scholar] [CrossRef]
- El-Sayed, H.R.; Khataan, H. A suggested new profile for externally pressurized power screws. Wear 1975, 31, 141–156. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, S.; Lu, C.; Liu, Z. Performance Analysis of Capillary-Compensated Hydrostatic Lead Screws with Discontinuous Helical Recesses Including Influence of Pitch Errors in Nut. Tribol. Trans. 2016, 60, 974–987. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, C.; Ma, J. Research on two methods for improving the axial static and dynamic characteristics of hydrostatic lead screws. Tribol. Int. 2017, 109, 152–164. [Google Scholar] [CrossRef]
- Susumu, O. A Prototype Production of Aerostatic Lead Screw with Resin Molded Bearing Surfaces and Performance Evaluation. J. Jpn. Soc. Precis. Eng. 2015, 81, 570–575. [Google Scholar]
- LU, Z.; YU, X. Research on the Porous Aerostatic Lead Screw and Nut. Mach. Tool Hydraul. 2007, 35, 34–36. [Google Scholar]
- Vortmeyer-Kley, R.; Gräwe, U.; Feudel, U. Detecting and tracking eddies in oceanic flow fields: A Lagrangian descriptor based on the modulus of vorticity. Nonlinear Proc. Geoph. 2016, 23, 159–173. [Google Scholar] [CrossRef]
- Zhang, H.; Hao, H.; He, L.; Gong, M. Single-mode annular chirally-coupled core fibers for fiber lasers. Opt. Commun. 2018, 410, 297–304. [Google Scholar] [CrossRef]
- Gelfgat, A. Instability of steady flows in helical pipes. Phys. Rev. Fluids 2020, 5, 103904. [Google Scholar] [CrossRef]
- Germano, M. On the effect of torsion on a helical pipe flow. J. Fluid Mech. 1982, 125, 1–8. [Google Scholar] [CrossRef]
- Bolinder, C.J. Curvilinear coordinates and physical components: An application to the problem of viscous flow and heat transfer in smoothly curved ducts. J. Appl. Mech. 1996. [Google Scholar] [CrossRef]
- Tuttle, E.R. Laminar flow in twisted pipes. J. Fluid Mech. 2006, 219, 545–570. [Google Scholar] [CrossRef]
- Ma, W.; Cui, J.; Liu, Y. Improving the pneumatic hammer stability of aerostatic thrust bearing with recess using damping orifices. Tribol. Int. 2016, 103, 281–288. [Google Scholar] [CrossRef]
- Miyan, M. Different phases of Reynolds equation. Int. J. Appl. Res. 2016, 2, 140–148. [Google Scholar]
- Al-Ghussain, L.; Bailey, S.C.C. An approach to minimize aircraft motion bias in multi-hole probe wind measurements made by small unmanned aerial systems. Atmos. Meas. Tech. 2021, 14, 173–184. [Google Scholar] [CrossRef]
- Hnat, S.K.; van Basten, B.J.H.; van den Bogert, A.J. Compensation for inertial and gravity effects in a moving force platform. J. Biomech. 2018, 75, 96–101. [Google Scholar] [CrossRef]
- Abass, B.A.; Muneer, M.A.A. Static and Dynamic Performance of Journal Bearings lubricated With Nano-Lubricant. Assoc. Arab Univ. J. Eng. Sci. 2018, 25, 201–212. [Google Scholar]
- Chen, X.; Zeng, L.; Zheng, F. Friction performance and optimisation of diamond-like texture on hydraulic cylinder surface. Micro. Nano Lett. 2018, 13, 1001–1006. [Google Scholar] [CrossRef]
- Chin, D.; Kim, K.; Yoon, M. Lubrication Behavior of Slider Bearing with Square Pocket Surface. J. Korean Soc. Manuf. Process Eng. 2017, 16, 119–125. [Google Scholar] [CrossRef]
- Huang, M.; Xu, Q.; Li, M.; Wang, B.; Wang, J. A calculation method on the performance analysis of the thrust aerostatic bearing with vacuum pre-load. Tribol. Int. 2017, 110, 125–130. [Google Scholar] [CrossRef]
- Premoli, A.; Rocchi, D.; Schito, P.; Tomasini, G. Comparison between steady and moving railway vehicles subjected to crosswind by CFD analysis. J. Wind Eng. Ind. Aerod. 2016, 156, 29–40. [Google Scholar] [CrossRef]
- Su, H. Determining the Value of Pressure in the Cavitation Zone for Steady-state Journal Bearing. China Mech. Eng. 2007, 88–90. [Google Scholar] [CrossRef]
- Zehra, I.; Kousar, N.; Rehman, K.U. Pressure dependent viscosity subject to Poiseuille and Couette flows via Tangent hyperbolic model. Phys. A 2019, 527, 121332. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Upper Fields | |||
| Parameter | Value | Parameter | Value |
| 0 | |||
| 0 | 0 | ||
| 0 | |||
| 0 | |||
| Lower Fields | |||
| Parameter | Value | Parameter | Value |
| 0 | |||
| 0 | 0 | ||
| 0 | |||
| 0 | |||
| Parameter | Value |
|---|---|
| 25 mm | |
| 10° | |
| 0.03 mm | |
| 27.5 mm | |
| 22.5 mm | |
| 26.5 mm | |
| 29.5 mm | |
| 32.5 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, Z.; Feng, X.; Li, H.; Lu, J.; Wang, Z.; Liu, Y. Boundary-Adapted Numerical Modeling of Flow in a Hydrostatic Leadscrew. Actuators 2021, 10, 190. https://doi.org/10.3390/act10080190
Su Z, Feng X, Li H, Lu J, Wang Z, Liu Y. Boundary-Adapted Numerical Modeling of Flow in a Hydrostatic Leadscrew. Actuators. 2021; 10(8):190. https://doi.org/10.3390/act10080190
Chicago/Turabian StyleSu, Zhe, Xianying Feng, Hui Li, Jiajia Lu, Zhaoguo Wang, and Yandong Liu. 2021. "Boundary-Adapted Numerical Modeling of Flow in a Hydrostatic Leadscrew" Actuators 10, no. 8: 190. https://doi.org/10.3390/act10080190
APA StyleSu, Z., Feng, X., Li, H., Lu, J., Wang, Z., & Liu, Y. (2021). Boundary-Adapted Numerical Modeling of Flow in a Hydrostatic Leadscrew. Actuators, 10(8), 190. https://doi.org/10.3390/act10080190