Abstract
Dynamic modeling and control of the soft pneumatic actuators are challenging research. In this paper, a neural network based dynamic control method used for a soft pneumatic actuator with symmetrical chambers is proposed. The neural network is introduced to create the dynamic model for predicting the state of the actuator. In this dynamic model, the effect of the uninflated rubber block on bending deformation is considered. Both pressures of the actuator are used for predicting the state of the actuator during the bending motion. The controller is designed based on this dynamic model for trajectory tracking control. Three types of trajectory tracking control experiments are performed to validate the proposed method. The results show that the proposed control method can control the motion of the actuator and track the trajectory effectively.
1. Introduction
Research on soft pneumatic actuators is increasing because they can provide a bigger driving force compared to other soft actuators. They are widely used in soft robots and soft manipulators [1,2,3,4]. Modeling and controlling ofthe soft pneumatic actuators are challenging research. This is because of the strong non-linearity due to the soft materials and the elastic deformation [5]. After the efforts of scholars, many static or quasi-static models are developed to describe the deformation of the soft actuators or soft robot [6,7,8]. However, the control of the soft pneumatic actuators is the most important work, especially in the application of soft robots or soft manipulators. It is critical to obtain the dynamic models of the soft pneumatic actuators before determining the control strategies. Because dynamic modeling brings more complexity compared to static modeling, the dynamic modeling of the soft pneumatic actuators is still in the preliminary stage; despite this, the applications of soft robotics is a rising progress.
In dynamic modeling research of soft actuators, the majority of dynamic models are model-based. Many model-based approaches to dynamic modeling are evolved from the continuum robots. Marchese et al. proposed a dynamic model for a fluidic powered manipulator, which is made entirely from soft elastomer. The Lagrangian approach is used for dynamic modeling [9]. Want et al. proposed a computationally efficient dynamical model of fluidic soft actuators [10].
However, soft pneumatic actuators are hard to model accurately. In addition to the non-linearities caused by soft material, in some applications, soft pneumatic actuators have complex shapes and structures. Moreover, high dimensional sensory feedback is required by the controllers if the accurate kinematic and dynamic models are available [11]. Due to these problems, the data-driven dynamic models of soft pneumatic actuators are proposed, which can provide promising results in dynamic modeling and control of soft robots. It is often used in feed-forward control of the soft robots and soft actuators [12]. In these data-driven methods, neural networks are widely used. Because neural networks can handle non-linearity and complexity problems, which is the main problem in soft robots and soft actuators modeling [1,13,14]. The earlier feed-forward control based on neural networks is proposed for continuum manipulator [15]. The neural networks were used as a component in the feed-forward control. Gillespie et al. used neural networks for model predictive control of soft robots. The neural networks were used to predict future states of a single joint system dynamics [16].
Most of the current studies have focused on simple or unidirectional motions of the actuators. However, during the application of soft pneumatic actuators, it is more necessary for the actuators to have the ability of complex motion. In order to be able to create actuators capable of multi-directional or complex motion, the structure of the actuators is inevitably becoming more complex. It brings more difficulty to the modeling and controlling of the soft actuators. Therefore, the control methods for the complex motion of soft actuators need to be studied.
In this paper, we build a bi-directionally bending pneumatic actuator with symmetrical chambers. The actuator is capable of bending in both directions. The model predictive control method is proposed, in which the neural network based dynamic modeling method is used. In this model, the effect of the uninflated rubber block on bending deformation is considered. Both pressures of the actuator are used for predicting the status of the actuator in bending motion. The neural network is used to construct the prediction function. The bi-directional bending motion is performed for collecting the dynamic data and training the neural networks. Then the model predictive control method is used based on the prediction function. With this control method, the bending motion of the drive can be controlled simply by obtaining the bending angle of the actuator and the pressure in both chambers.
2. The Pneumatic Soft Actuator with Symmetrical Chambers
In our previous work, a soft pneumatic actuator with symmetrical chambers was fabricated [17]. This actuator was built with reference to Luo’s method [18]. It was built by using the material Ecoflex-0030. The structure of the pneumatic actuator is shown in Figure 1. It has two blocks with many chambers. There is an ABS plate between the two blocks. This plate is used as a neutral layer. The chambers in different blocks are connected through a channel to achieve a uniform pressure. The actuator can bend bi-directionally when the chambers of different blocks are filled with pressurized fluid.
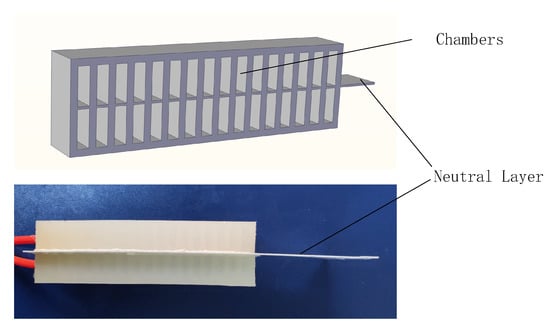
Figure 1.
The structure of pneumatic actuator.
It is assumed that the soft pneumatic actuator has constant curvature and the mass is distributed along the length uniformly. The detailed piece-wise constant curvature assumption can be found in [5,19]. The bending schematic of the soft pneumatic actuator is presented in Figure 2. The actuator is bent in the planer plane. The curve showed in the figure is the neutral layer of the actuator, is the bending angle. Since the driver is symmetrically constructed, the deformation in the other direction is the same. The figure just shows the one bending direction of the actuator. We define the bending angle in this direction as positive, the other direction as negative.
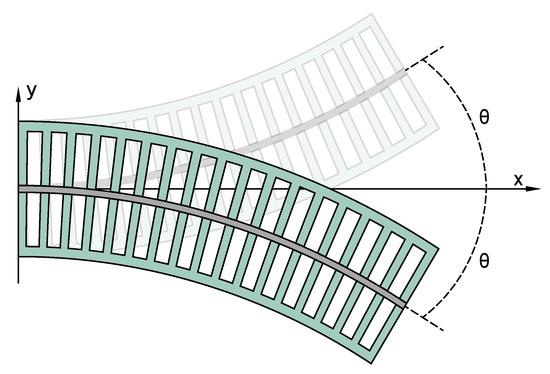
Figure 2.
The schematic of the bi-directional pneumatic actuator.
3. Dynamic Modeling of the Soft Pneumatic Actuator
In order to control the soft actuator, the dynamic model of the soft actuator should be obtained. Because the accurate dynamic models are difficult to obtain, the neural network based dynamic modeling method is used. Generally, the dynamic model used for system control can be expressed in the following form
Although the neural network method is used for dynamic modeling, the two symbols in the equation above should be determined. They are , the state of the soft actuator, and , the control input of the soft actuator. According to the Lagrangian approach, the potential energy, the kinetic energy and the generalized force with respect to the generalized coordination should be derived. In this soft pneumatic actuator, the input fluidic energy delivered from a pump is stored as strain energy and transferred to kinetic energy. The strain energy leads to deforming the actuator both on the inflated side and uninflated side. The gravitational potential energy is neglected because the actuator is deformed in a planar plane. The energy description is
In this equation, is the input volume supplied by the pump. is the pressure in the actuator. It is a function of the input volume. is the kinetic energy. and are the strain energy of the inflated side and uninflated side, respectively. The is the energy lost due to the fluid transmission line. Since this part of the energy has little effect on the results. It is neglected in this study.
The dynamics equation of the pneumatic actuator is presented as
where is the Lagrangian function. is the bending angle of the actuator, is the generalized force. The generalized force is caused by the fluidic pressure from the pump. The actuator is a symmetrical structure, both sides of the chambers are considered. is the coefficient to express the damping characteristics. The generalized force is caused by the fluidic pressure in the chambers on both sides of the actuator. It can be derived as
where and are the fluidic volume. It follows that the state of this soft actuator with symmetrical chambers can be presented by . Additionally, changes in and can directly affect the motion of the actuator. Then can be used as control input of the actuator. The discrete dynamic model can be presented as
where is the non-linear function. , represents the angle of the actuator, represents the angle velocity of the actuator. k is the discrete time step.
The neural network can be used to construct this non-linear function. It is presented as
where is a activation function. The sigmoid activation function is mostly used in the neural network. In this paper, the bi-directional pneumatic actuator is studied. According to the bending schematic shown in Figure 2, we defined the varies from to . The tanh activation function is more suitable than sigmoid activation function. The tanh activation function can be presented as
where , then the Equation (7) is change to
4. Control Method of the Soft Pneumatic Actuator
The model predictive control method can solve optimal control problems. It can be used for controlling the soft pneumatic actuator. From the dynamic model of the soft actuator, the discrete dynamic model can be expressed as
where , . The optimization is minimized the cost function
And this function has the following constraints:
As the air pressure is completely controlled by the inlet and outlet valve. and are constrained to the form expressed in the above equation. represents the variation in pressure caused by opening the inlet valve for a fixed time. Although represents the variation in pressure caused by opening the outlet valve.
According to this dynamic model, the state of the soft actuator can be presented as
The above equation can be abbreviated as
Assume is the final goal of the control, Equation (13) can be transformed into
From Equation (14), the cost function can be presented as
where Q and R are the diagonal matrices that represent the weight factor. According to the constraints, the optimal result can be transferred to the control instructions of the valve.
5. The Control System and Experiment Setup of the Soft Pneumatic Actuator
In order to validate the proposed control method, a pneumatic control system is established for the bi-directional pneumatic actuator. The dynamic data used to train the dynamic model is also obtained from this system. The sketch map of this system is shown in Figure 3.
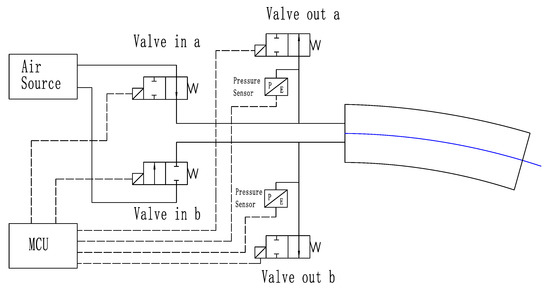
Figure 3.
The schematic of control system for the bi-directionally pneumatic actuator.
The pressure in the air circuit is controlled by using a microcontroller unit (MCU) to control the opening and closing of the air valve. The common systems such as stm32f103, arduino, etc., can be used as MCU of the control system.By controlling the air to inflate both chambers in turn, the actuator bends to both sides, thus making the actuator to swing like afishtail. According to the dynamic model proposed in Section 2, the pressure of different chambers, bending angle is collected. The bending angle is measured by the gyroscope which is mounted on the end of the neutral layer. The air pressure is measured by the pressure sensors after the inlet valves. Figure 4 shows the pneumatic control system of the actuator. The mounting of the sensors can also be seen.
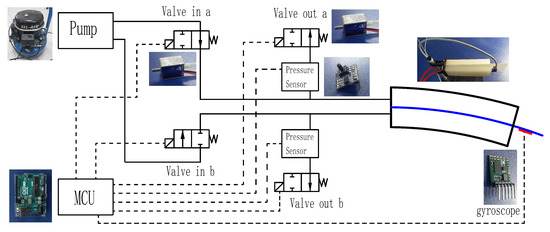
Figure 4.
The experimental setup of the pneumatic actuator.
When obtaining the dynamic data for training the model, the actuator is forced to bend to both sides and swing freely. The maximum bending angle is controlled by setting a pressure threshold. The control process of the actuator is to inflate the chambers on one side of the actuator, when the pressure threshold is reached, open the outlet valve and simultaneously inflate the other side, and so on.
Once the model training is complete, according to the previously proposed control method, the motion control is performed to validate the proposed method. The chart of the control system is shown in Figure 5.
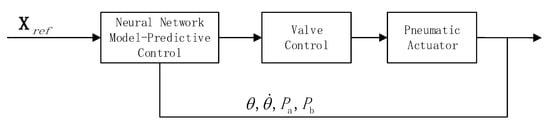
Figure 5.
The chart of the control system for pneumatic actuator.
6. Results and Discussion
According to the dynamic modeling method proposed in Section 3, the dynamic model constructed by the neural network is trained by the data collected from the control system of the pneumatic actuator. The three layers network is used. The neural network is built with three layers, in this network, the hidden layer has 50 neurons. The 2000 samples collected by the control system are used for training the network. 40 samples are used to validate the training process. The training epochs are 2000. In order to estimate the precise caused by opening and closing of the air valve, the data collection interval is a fixed value. This value is determined by control frequency. The control frequency in this study is 50 hz. Then the duration of the time sample in data collection is 0.02 ms. The motion of the actuator for collecting the dynamic data is shown in Figure 6. To validate the dynamic model, the step prediction is presented. The prediction results are also shown in Figure 6.
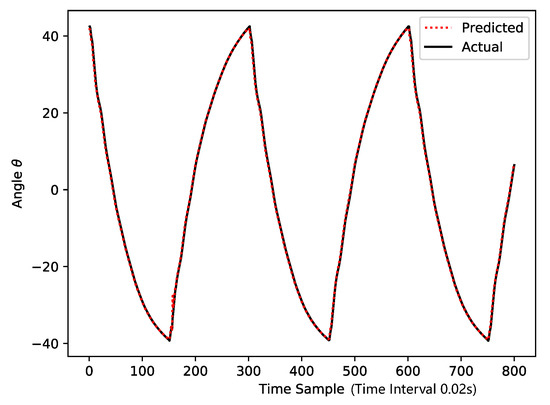
Figure 6.
The training data and the predicted data of the pneumatic actuator.
Based on the dynamic model, the control experiments are performed. Three different types of trajectory control are performed. Figure 7 shows the actuator state maintenance experiment, that is, the reference curve is a fixed bending angle. Since the proposed dynamic model approximates the actuator as a first-order system, ignoring its inertia matrix, the model predictive control method does not effectively suppress the second-order vibration caused by system inertia during the parameter optimization process, and requires a closed-loop compensation to suppress the vibration. However, due to the small mass of the actuator, the second-order vibration amplitude is small, but the vibration frequency is relatively high. It brings high requirements for the controller closed-loop compensation process and the valve control algorithm. It can be seen in the figure, when one sied of the actuator is pressurized, its bending angle increases rapidly, the angular acceleration is larger, producing a more obvious second-order vibration with a higher vibration frequency. At this time, the effect of the compensation process is not obvious. After the vibration is reduced, the controller can compensate the accumulated error effectively, so that the actuator can maintain the bending angle.
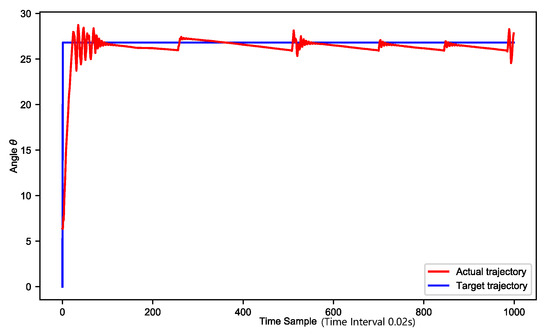
Figure 7.
Fixed bending angle maintaining results.
Figure 8 shows the reference trajectory and the actual trajectory of the bi-directional swing of the actuator. It can be seen from the figure that the controller effectively controls the actuator to bend to the target angle, but it cannot effectively suppress the second-order vibration. Due to the damping characteristics of the actuator, the bending angle has a certain hysteresis. Because the training set of the dynamic model is small and the datum type is single, the error of the model prediction is large, and the instability occurs. For example, in the swing process, the second-order vibration is continuously activated due to the unreasonable control input caused by the prediction deviation.
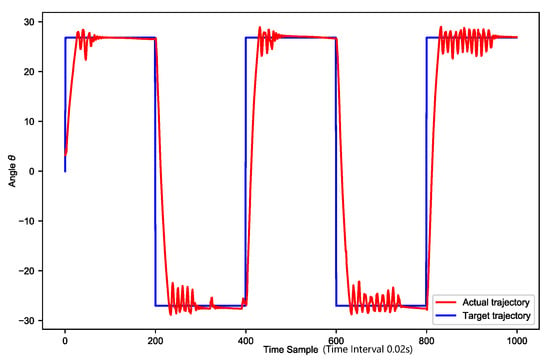
Figure 8.
Oscillating trajectory tracking results.
Figure 9 shows the reference trajectory and actual trajectory of the actuator swinging in a sinusoidal curve. It can be seen from the figure that the actual trajectory of the actuator is basically consistent with the reference value. Since the optimization process of the model predictive control method consumes more calculation time, which limits the control step of the controller, the target trajectory is not smooth enough. In addition, during the actual control experiment, when the bending angle of the actuator crosses the zero point, the chambers on the other side is suddenly pressurized and inflated, which may cause a sudden change in the state of the actuator. Then the trajectory of the actuator will fluctuate irregularly at this time.
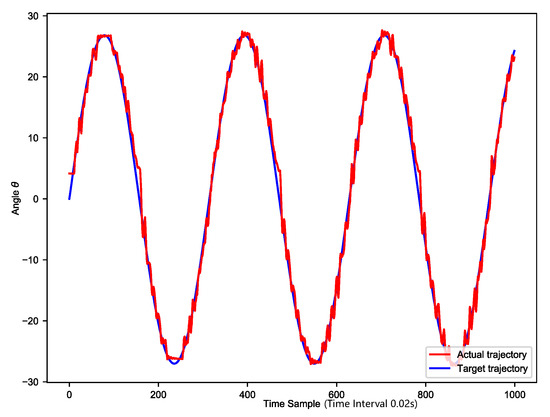
Figure 9.
Sinusoidal curve trajectory tracking results.
7. Conclusions
Soft pneumatic actuators are hard to model accurately, especially soft pneumatic actuators that have complex shapes. Conventional model-based approaches are difficult for applying in dynamic control of the soft pneumatic actuator. In this paper, a neural network based dynamic control method is proposed for motion control of the soft pneumatic actuator with symmetrical chambers. A bi-directional bending pneumatic actuator is built. Both sides of the pressure data are used for predicting the dynamic state. The model predictive controller is used for designing the controller of the actuator. The control system is built for validating the proposed method. Three different types of motion are performed. From the experimental results, the control system can control the motion of the soft actuator and track the trajectory very well.
Funding
This research is supported by Natural Science Foundation of Shaanxi Province (No. 2020JQ-813).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wu, P.; Jiangbei, W.; Yanqiong, F. The Structure, Design, and Closed-Loop Motion Control of a Differential Drive Soft Robot. Soft Robot. 2018, 5, 71–80. [Google Scholar] [CrossRef] [PubMed]
- Manti, M.; Hassan, T.; Passetti, G.; D’Elia, N.; Laschi, C.; Cianchetti, M. A bioinspired soft robotic gripper for adaptable and effective grasping. Soft Robot. 2015, 2, 107–116. [Google Scholar] [CrossRef]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar] [CrossRef]
- Hu, W.; Mutlu, R.; Li, W.; Alici, G. A structural optimisation method for a soft pneumatic actuator. Robotics 2018, 7, 24. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Learning dynamic models for open loop predictive control of soft robotic manipulators. Bioinspir. Biomimetics 2017, 12, 066003. [Google Scholar] [CrossRef] [PubMed]
- Shapiro, Y.; Gabor, K.; Wolf, A. Modeling a hyperflexible planar bending actuator as an inextensible Euler–Bernoulli beam for use in flexible robots. Soft Robot. 2015, 2, 71–79. [Google Scholar] [CrossRef]
- Moseley, P.; Florez, J.M.; Sonar, H.A.; Agarwal, G.; Curtin, W.; Paik, J. Modeling, design, and development of soft pneumatic actuators with finite element method. Adv. Eng. Mater. 2016, 18, 978–988. [Google Scholar] [CrossRef]
- Marchese, A.D.; Rus, D. Design, kinematics, and control of a soft spatial fluidic elastomer manipulator. Int. J. Robot. Res. 2016, 35, 840–869. [Google Scholar] [CrossRef]
- Marchese, A.D.; Tedrake, R.; Rus, D. Dynamics and trajectory optimization for a soft spatial fluidic elastomer manipulator. Int. J. Robot. Res. 2016, 35, 1000–1019. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, Y.; Zhu, Y.; Zhu, S. A computationally efficient dynamical model of fluidic soft actuators and its experimental verification. Mechatronics 2019, 58, 1–8. [Google Scholar] [CrossRef]
- Renda, F.; Giorelli, M.; Calisti, M.; Cianchetti, M.; Laschi, C. Dynamic Model of a Multibending Soft Robot Arm Driven by Cables. IEEE Trans. Robot. 2014, 30, 1109–1122. [Google Scholar] [CrossRef]
- George Thuruthel, T.; Ansari, Y.; Falotico, E.; Laschi, C. Control strategies for soft robotic manipulators: A survey. Soft Robot. 2018, 5, 149–163. [Google Scholar] [CrossRef] [PubMed]
- Reinhart, R.F.; Shareef, Z.; Steil, J.J. Hybrid analytical and data-driven modeling for feed-forward robot control. Sensors 2017, 17, 311. [Google Scholar] [CrossRef] [PubMed]
- Satheeshbabu, S.; Uppalapati, N.K.; Chowdhary, G.; Krishnan, G. Open loop position control of soft continuum arm using deep reinforcement learning. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5133–5139. [Google Scholar]
- Braganza, D.; Dawson, D.M.; Walker, I.D.; Nath, N. A neural network controller for continuum robots. IEEE Trans. Robot. 2007, 23, 1270–1277. [Google Scholar] [CrossRef]
- Gillespie, M.T.; Best, C.M.; Townsend, E.C.; Wingate, D.; Killpack, M.D. Learning nonlinear dynamic models of soft robots for model predictive control with neural networks. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 39–45. [Google Scholar] [CrossRef]
- Zhou, W.; Li, Y. Modeling and Analysis of Soft Pneumatic Actuator with Symmetrical Chambers Used for Bionic Robotic Fish. Soft Robot. 2020, 7, 168–178. [Google Scholar] [CrossRef] [PubMed]
- Luo, M.; Agheli, M.; Onal, C.D. Theoretical Modeling and Experimental Analysis of a Pressure-Operated Soft Robotic Snake. Soft Robot. 2014, 1, 136–146. [Google Scholar] [CrossRef]
- Renda, F.; Cacucciolo, V.; Dias, J.; Seneviratne, L. Discrete Cosserat approach for soft robot dynamics: A new piece-wise constant strain model with torsion and shears. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 5495–5502. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).