
Motion Control System Design for a Flying-Type Firefighting System with Water Jet Actuators



Abstract
:1. Introduction
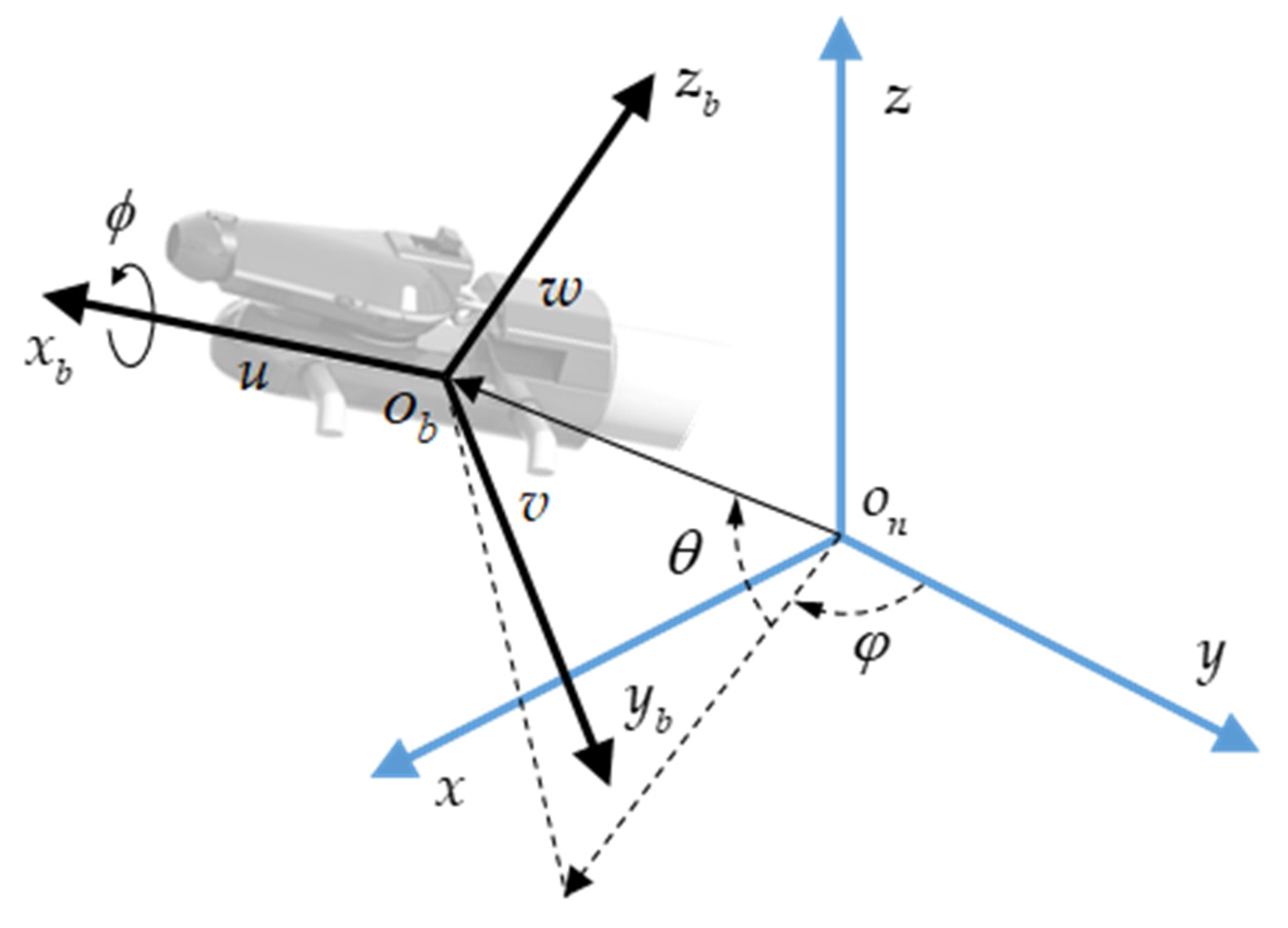
- The mathematical model derived in this paper evaluates and analyzes the dynamic characteristics of the mechanism in all 6-DoF motions.
- A sliding-mode control (SMC) system is designed for motion control with the designed actuation system. Although the available automated approaches have complex actuation systems, the control methods are rather simple. Thus, the SMC is chosen since SMC techniques are well known for their robustness facing disturbances and uncertainties.
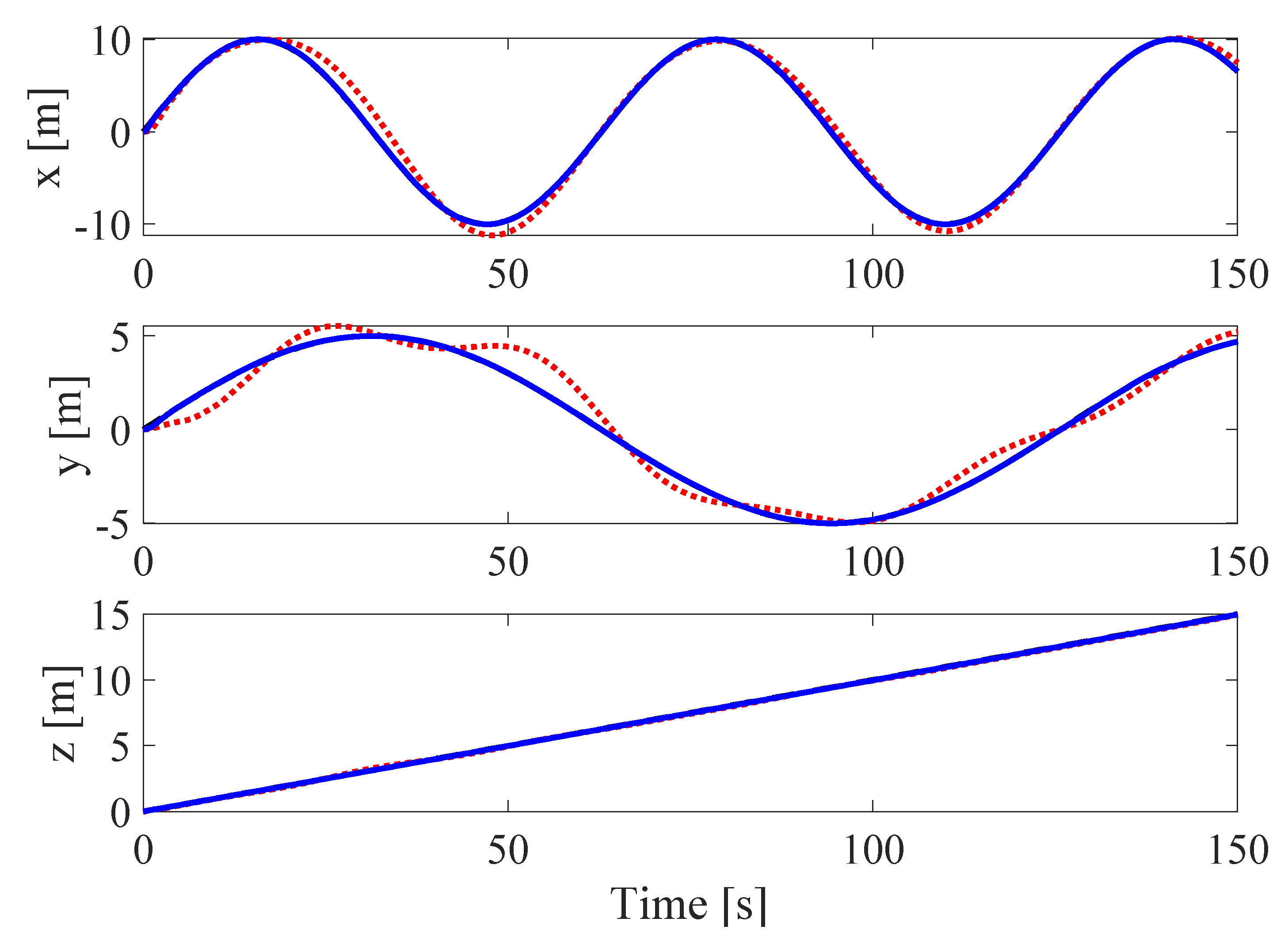
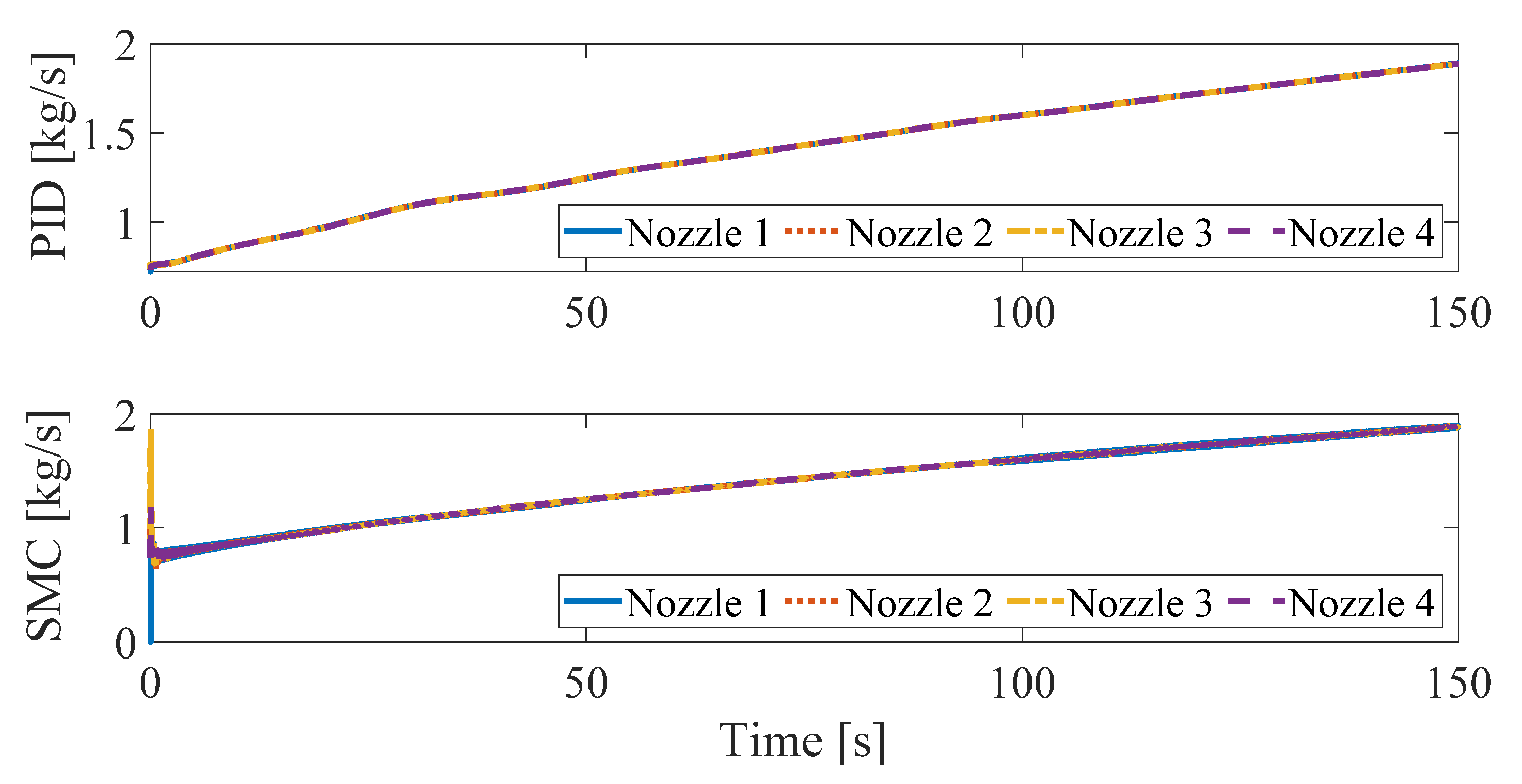
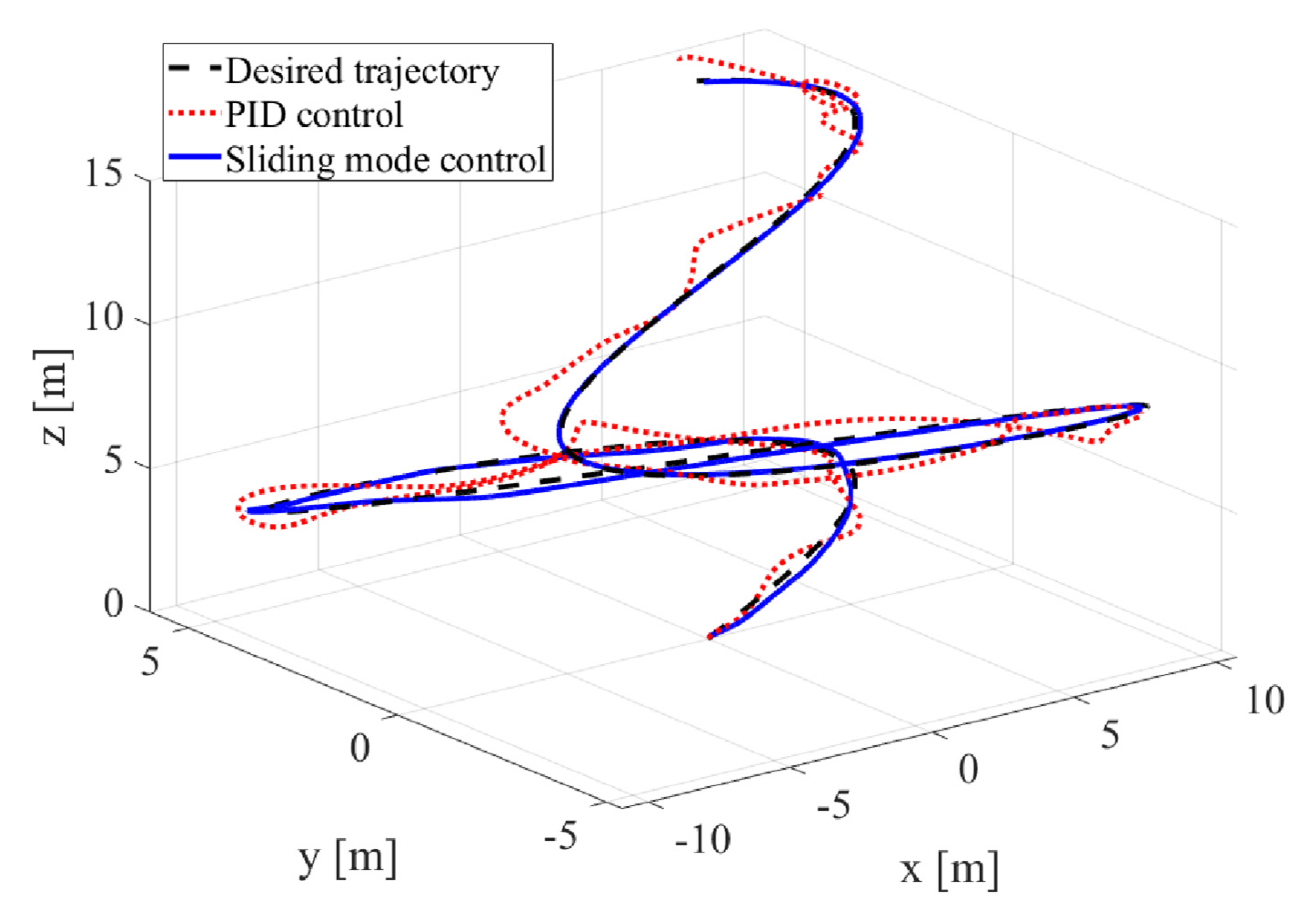
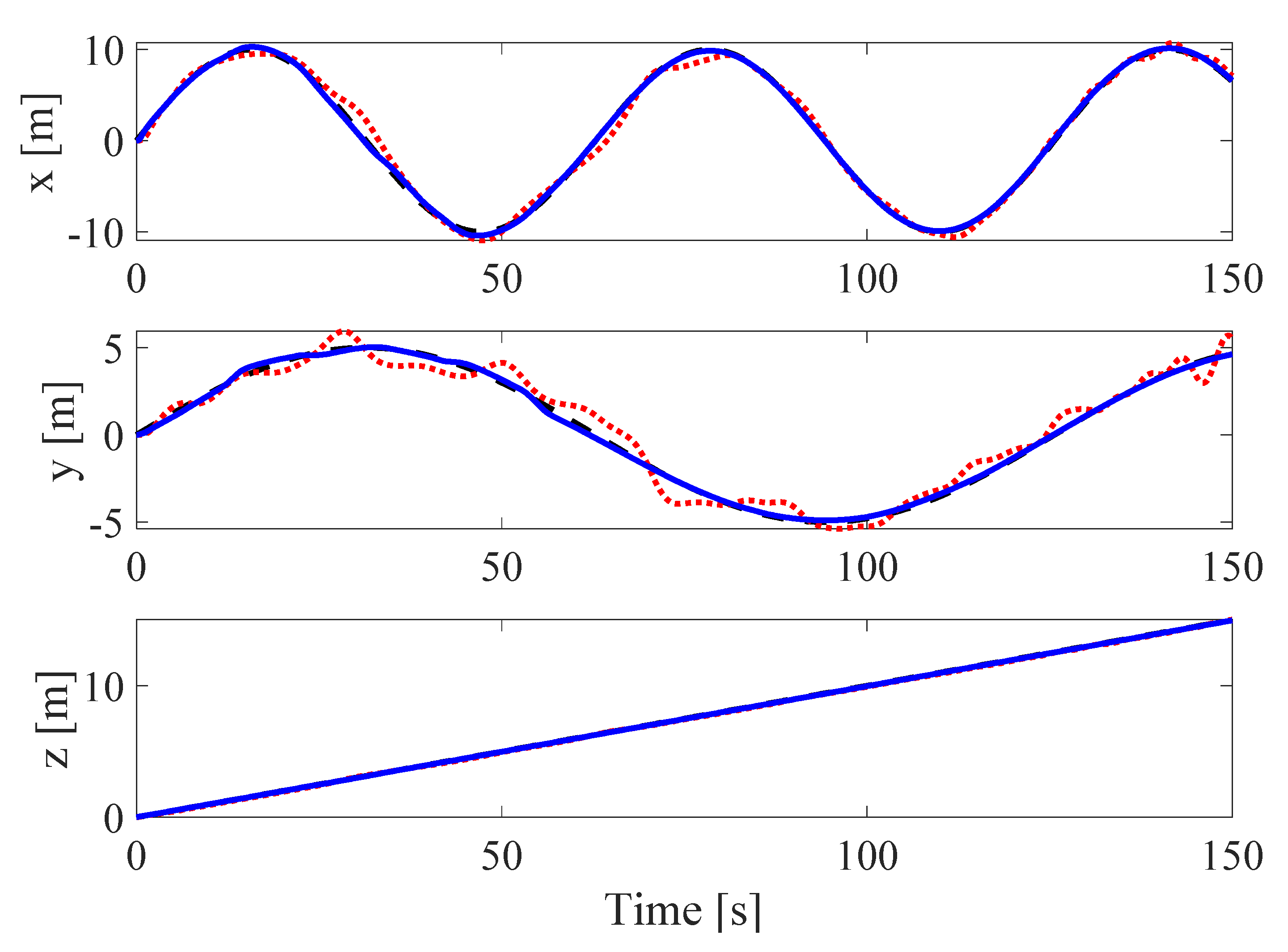
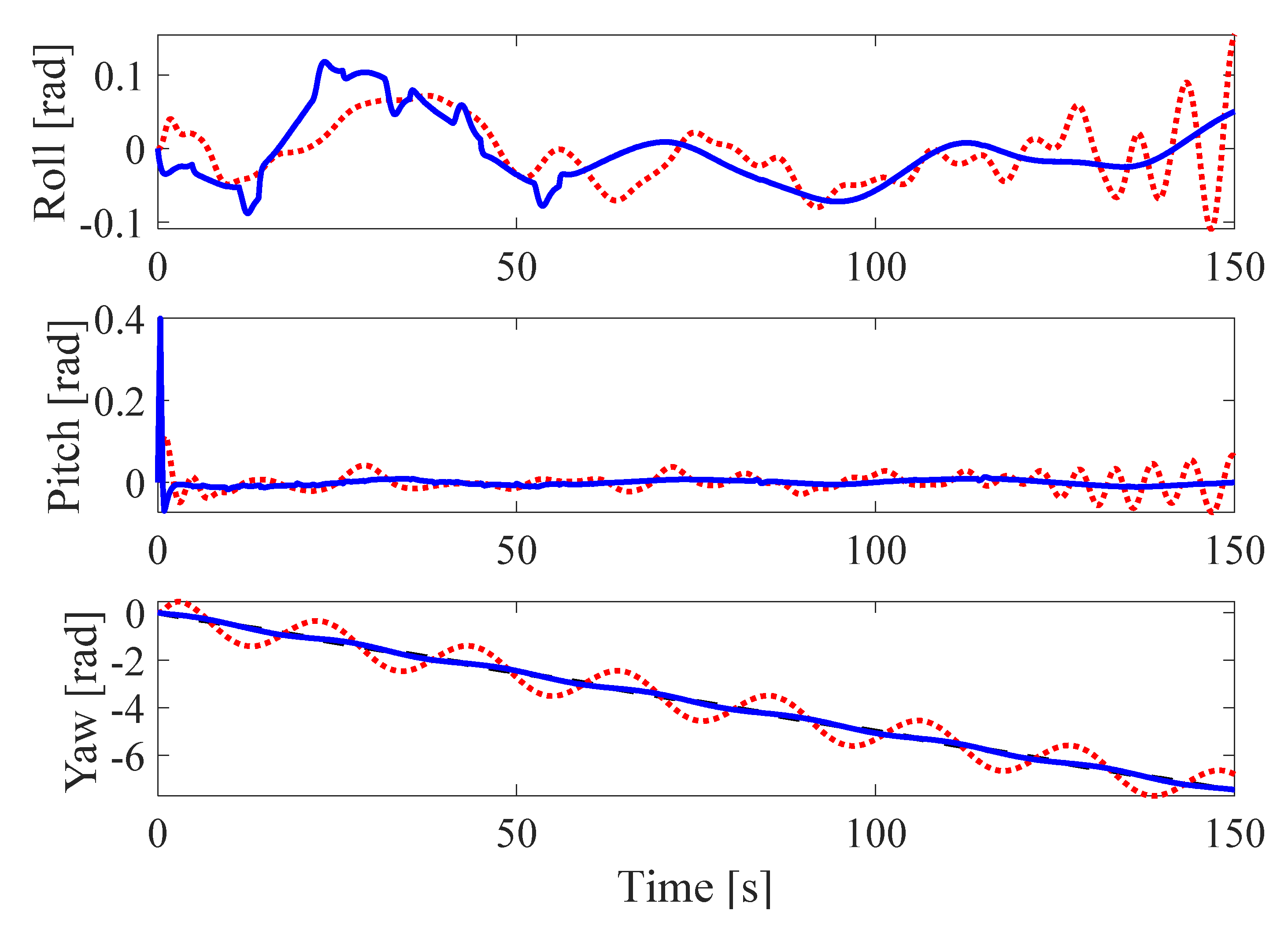
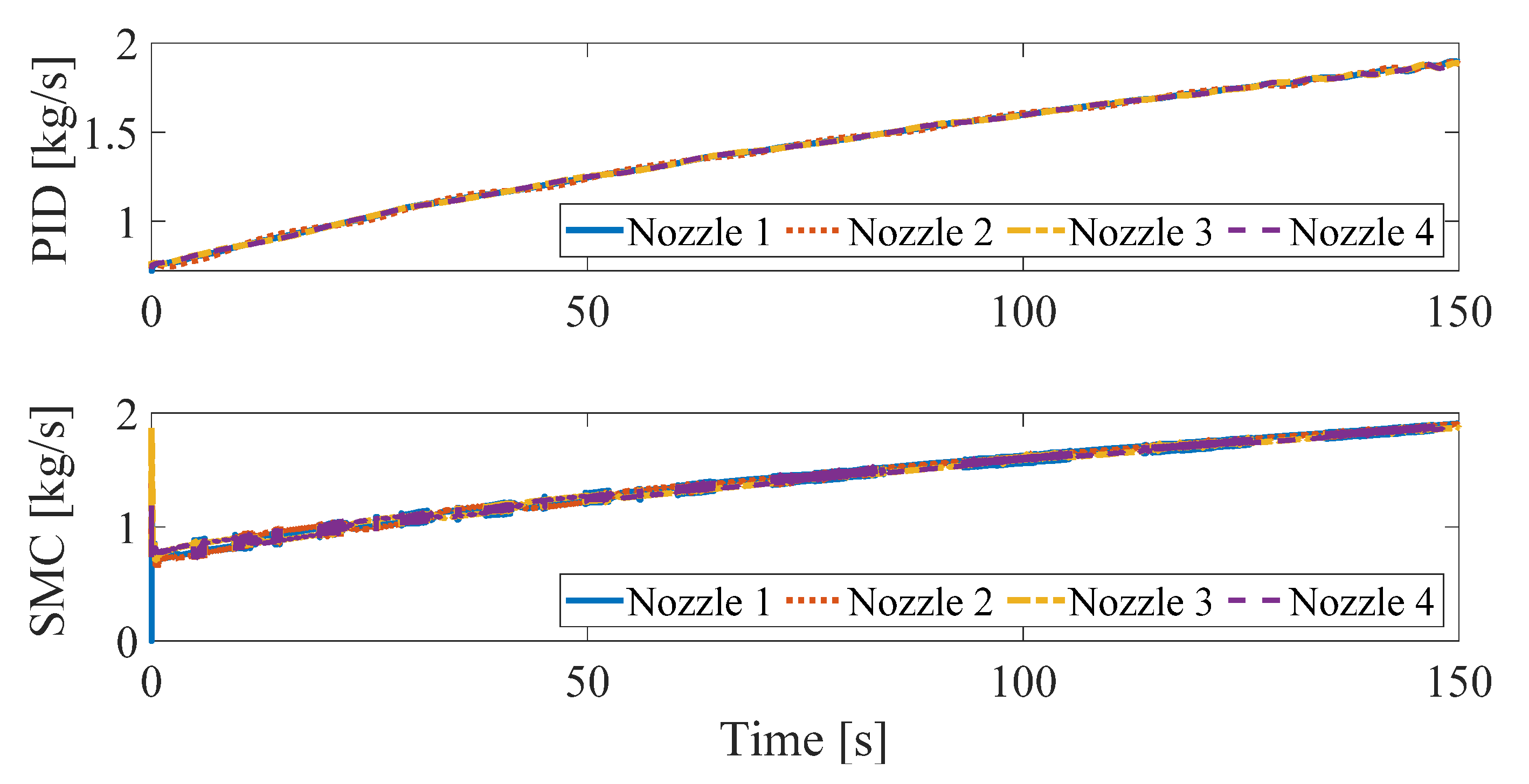
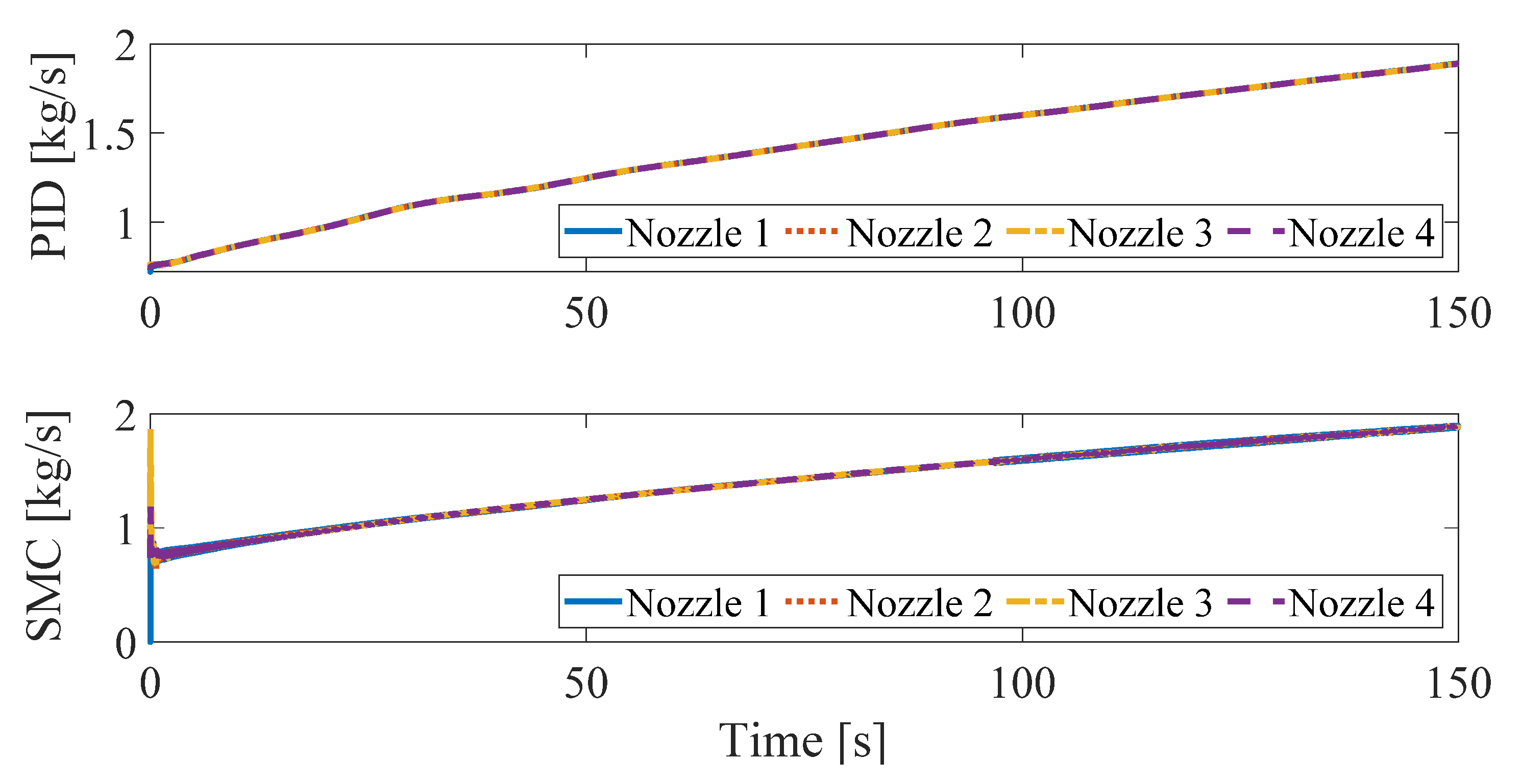
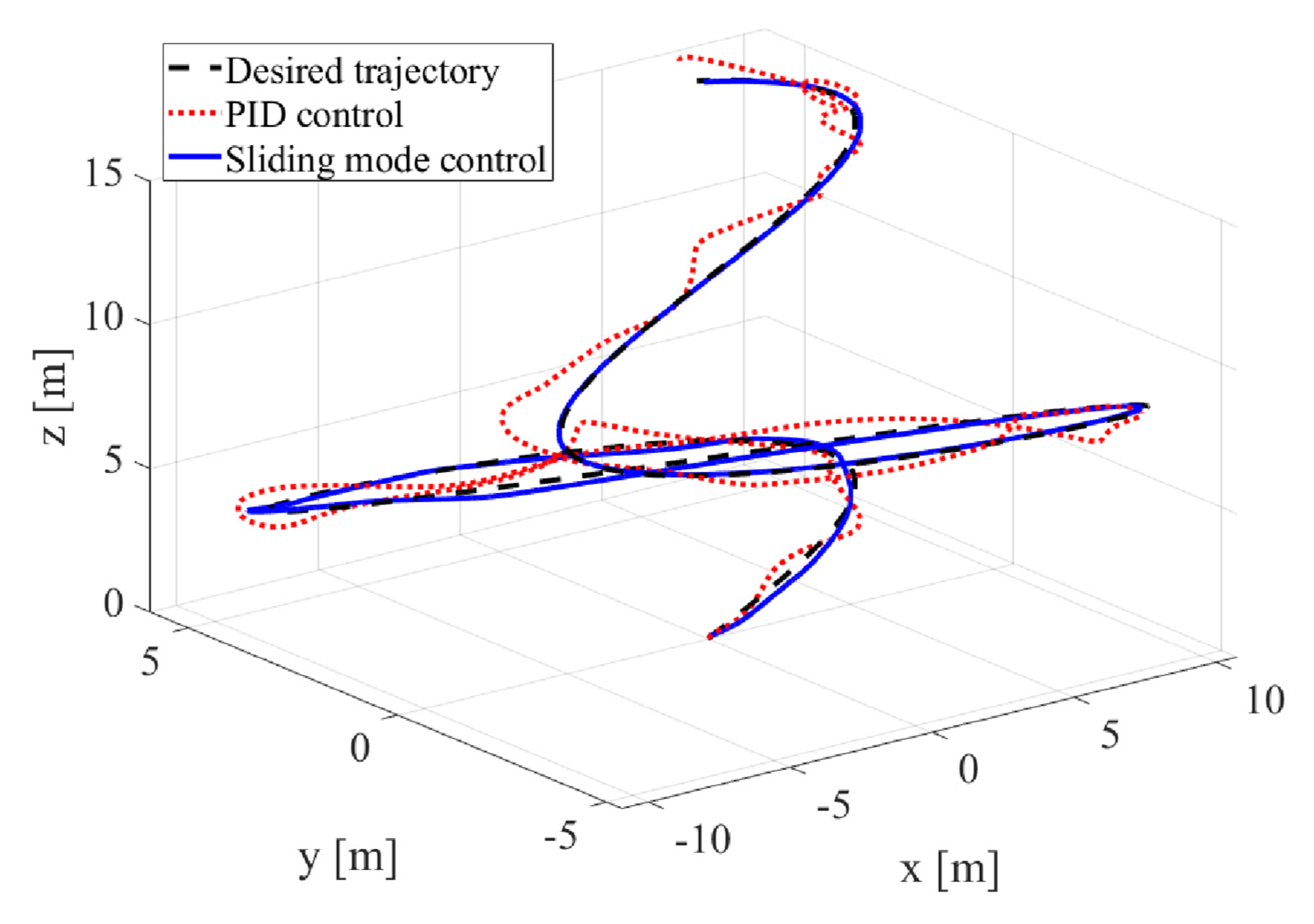
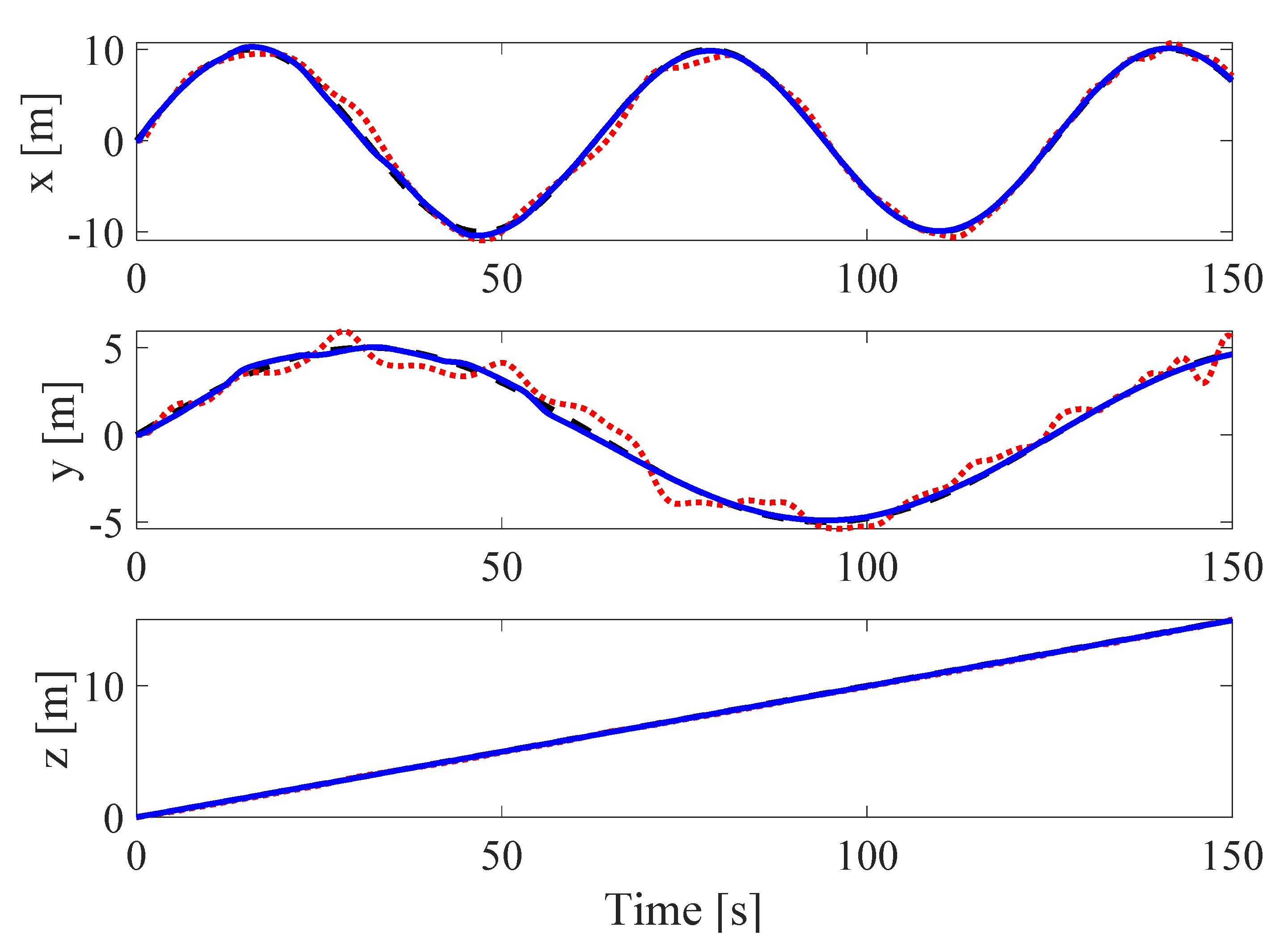
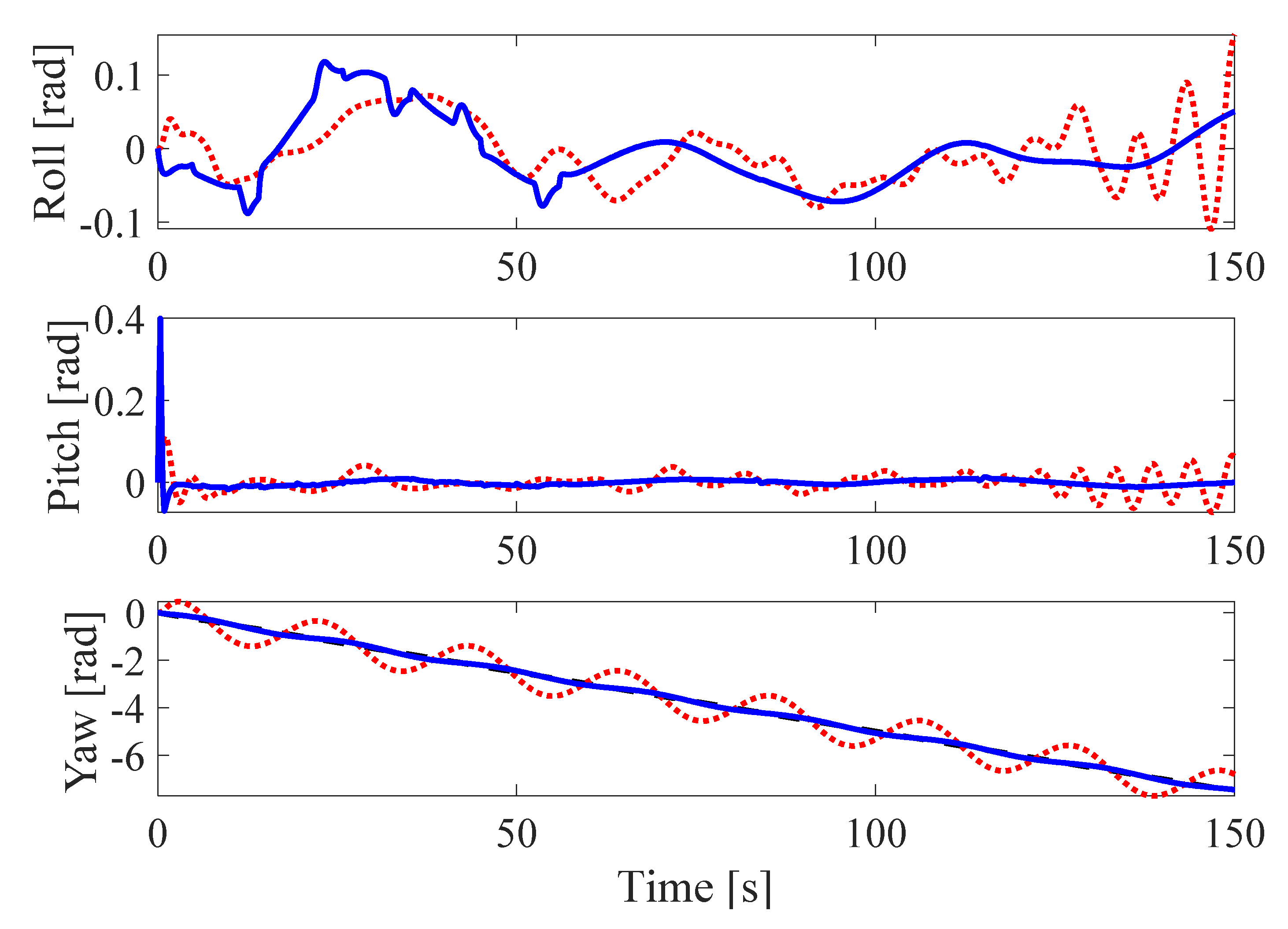
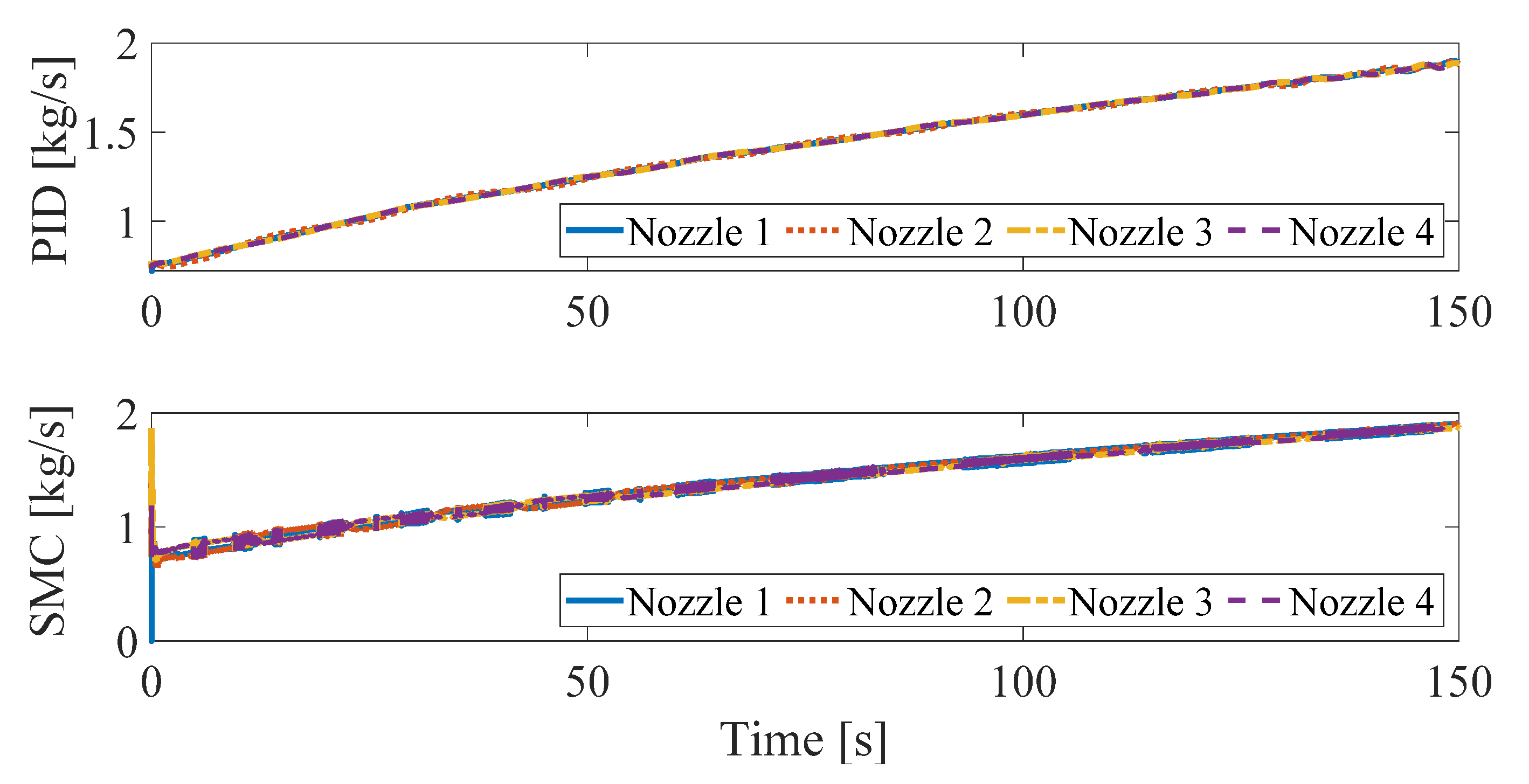
- Simulation tests are carried out with the SMC and a PID controller.
2. Flying-Type Firefighting System Model Representation
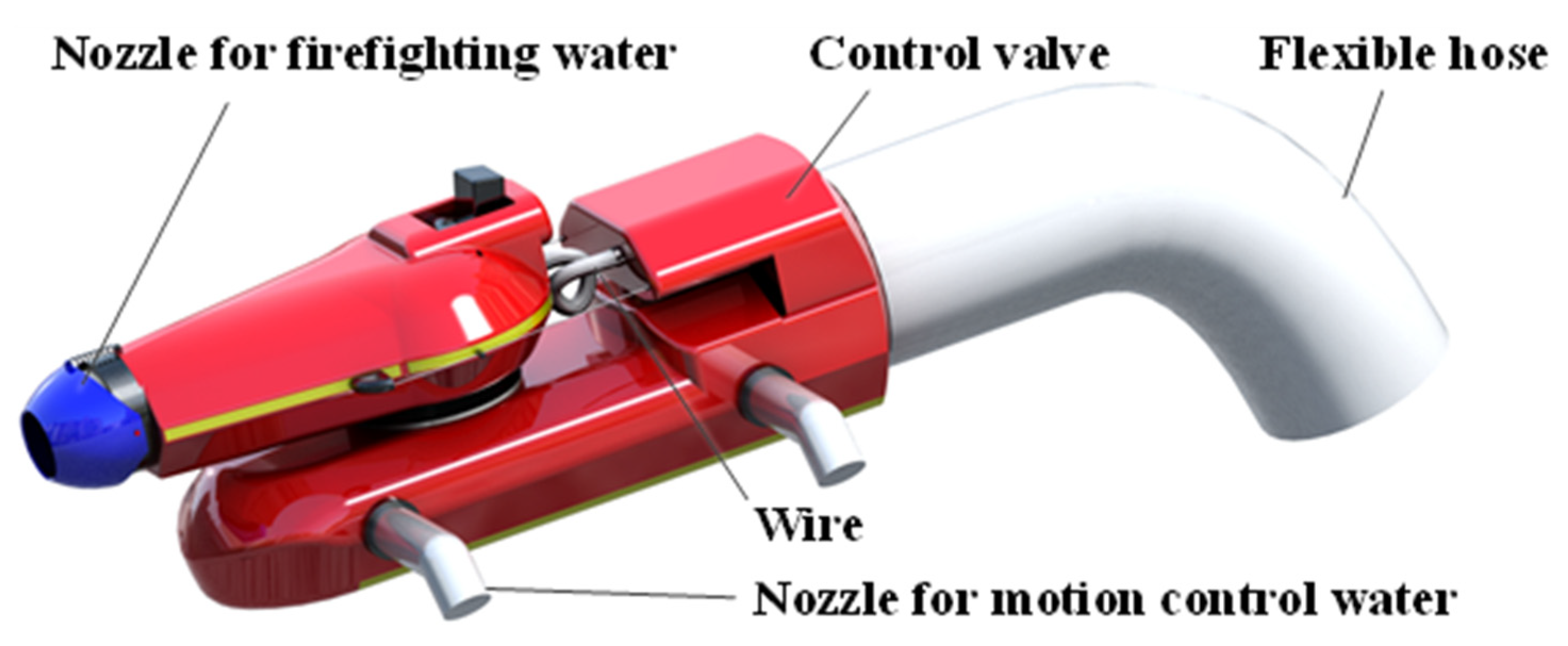
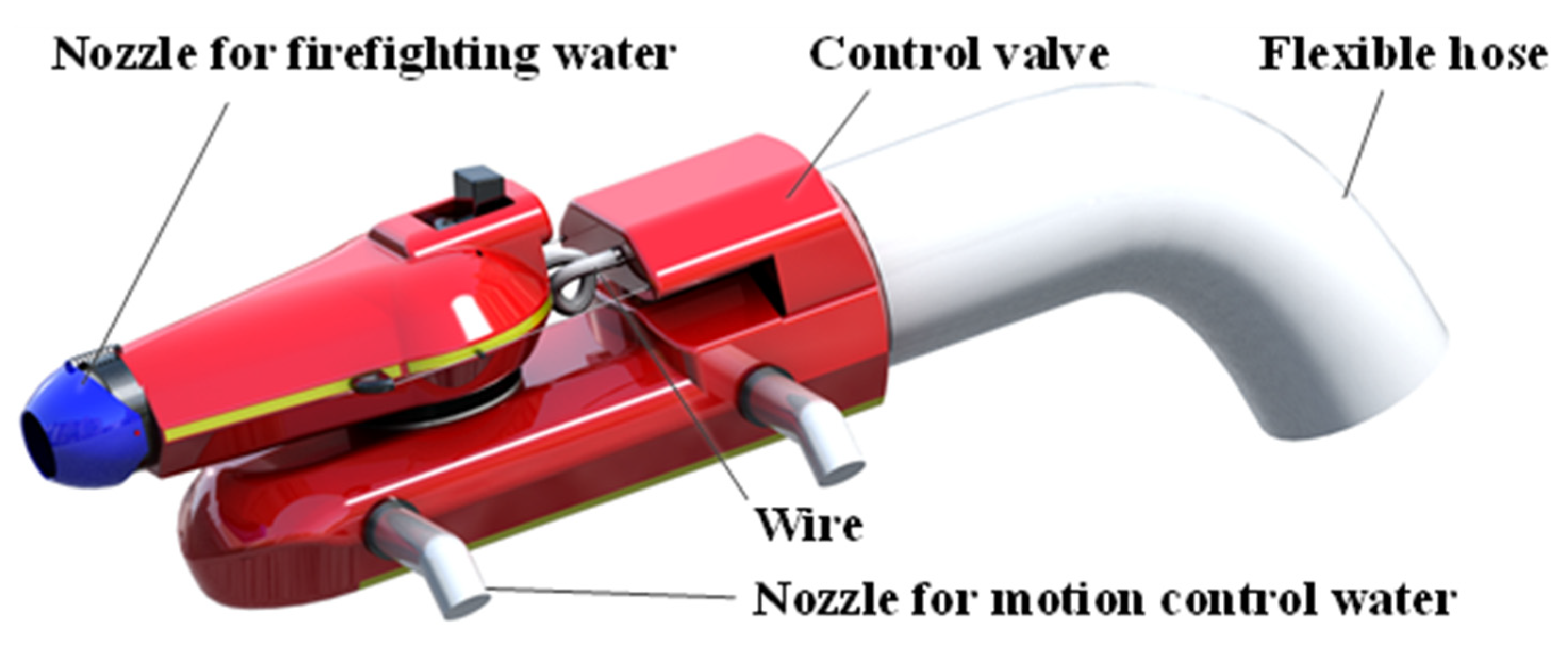
2.1. Concept of the Proposed System
- Water supply hose used for motion control and fire extinguishing operation.
- Wire-based guiding mechanism.
- Fire extinguishing water and motion control valve.
- Water spray nozzle and a spray direction control device.
- Water jet-type thrust and steering device.
- Gyro sensor, thermal infrared sensor, camera, etc.
- Heat-resisting and protection device.
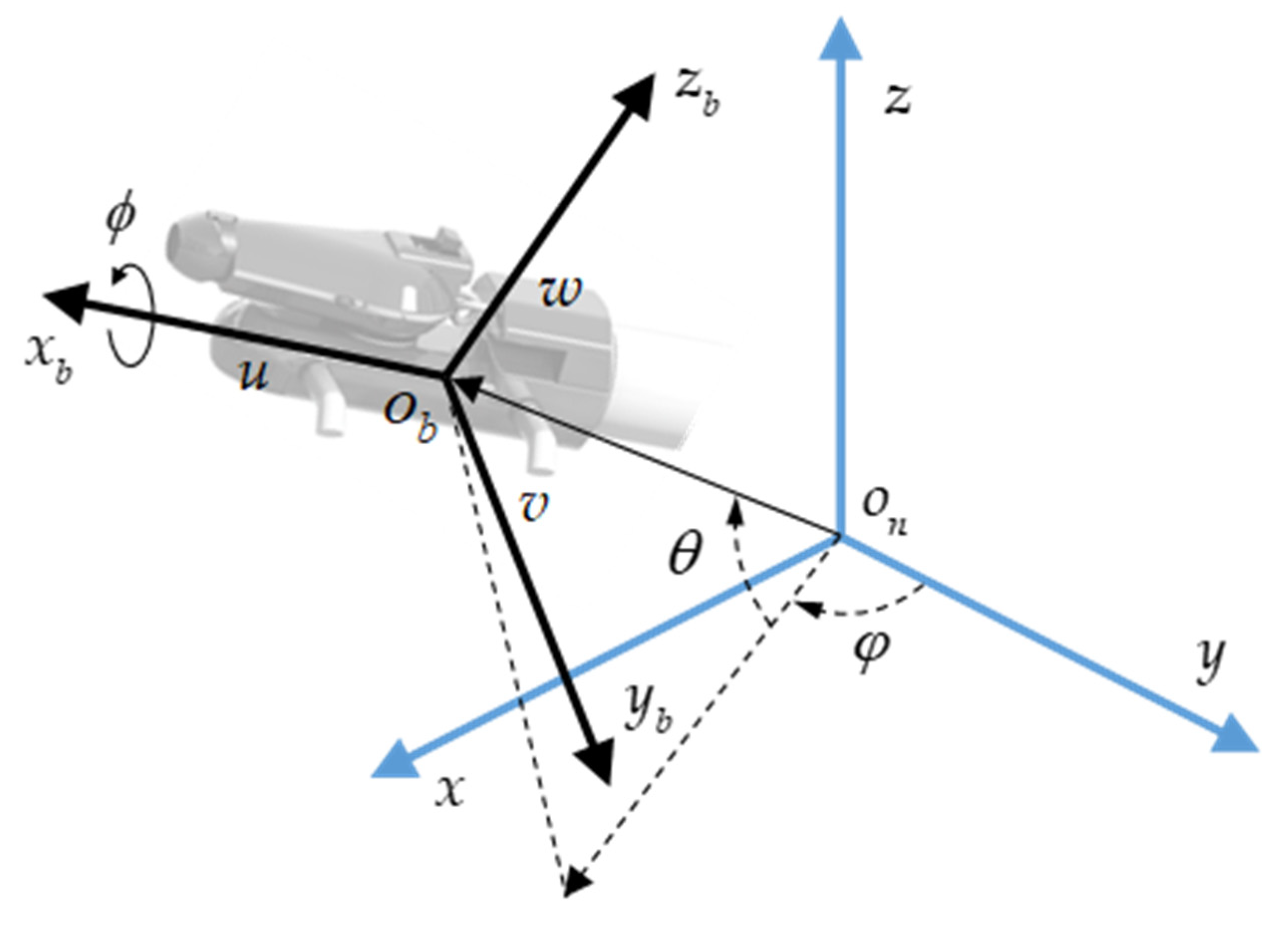
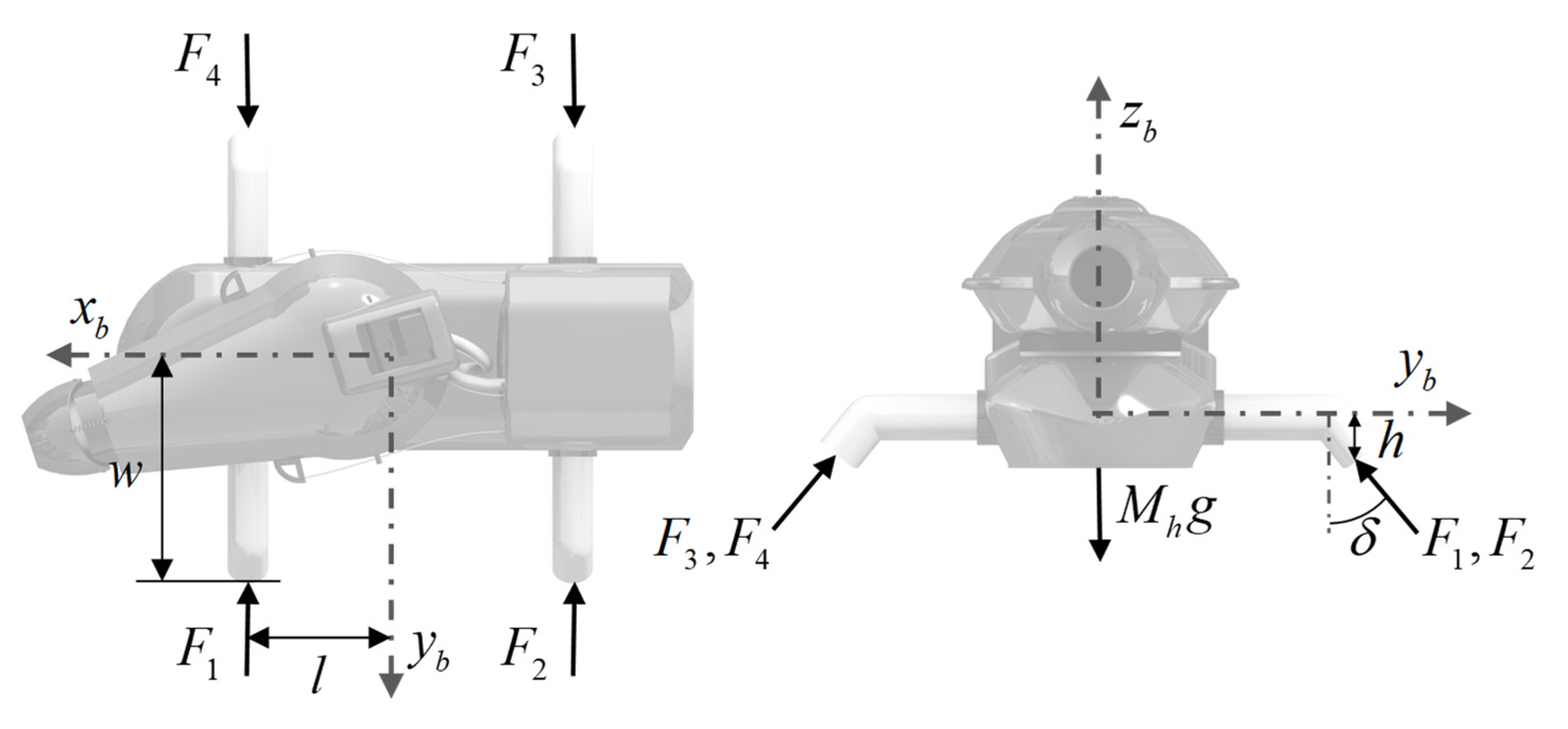
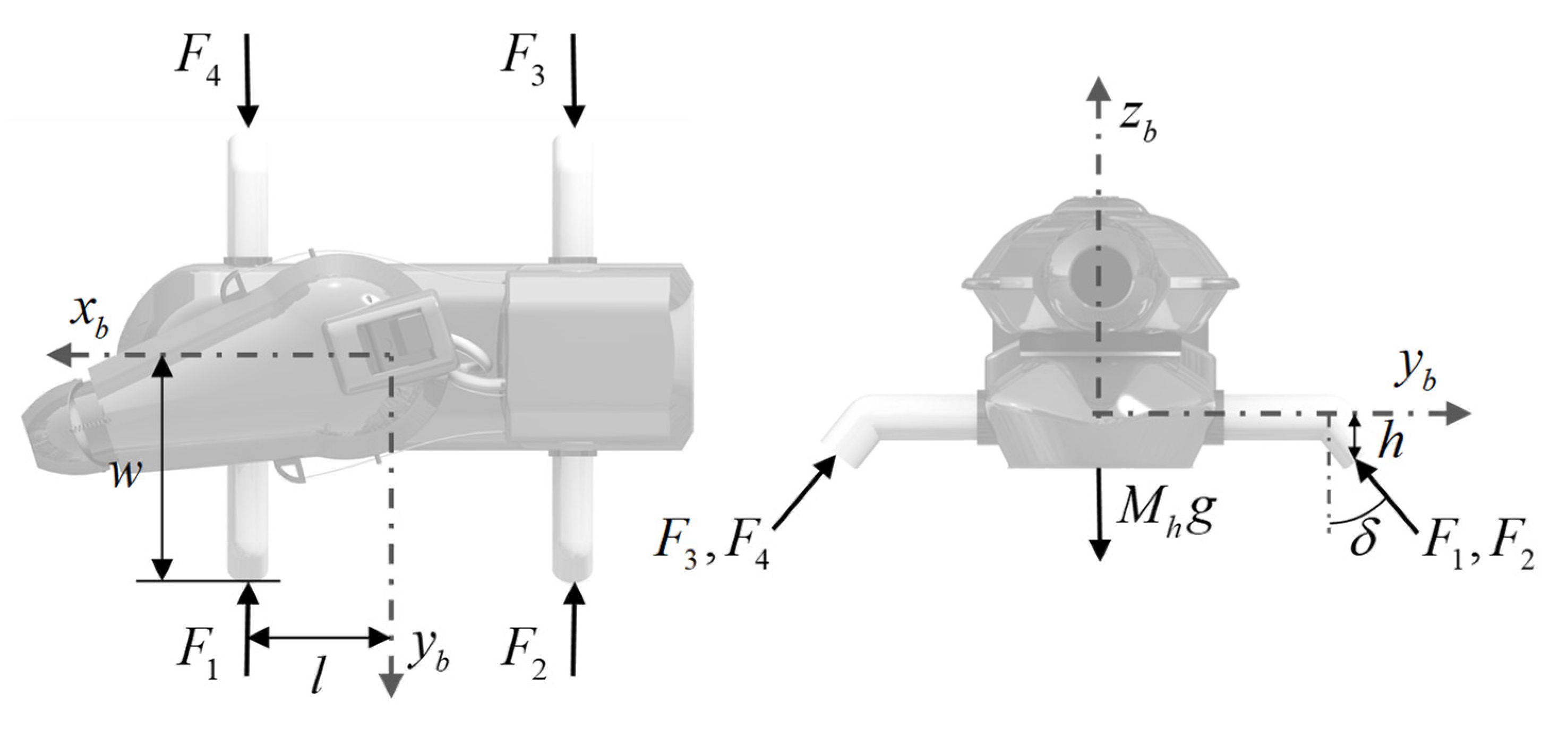
2.2. System Modeling
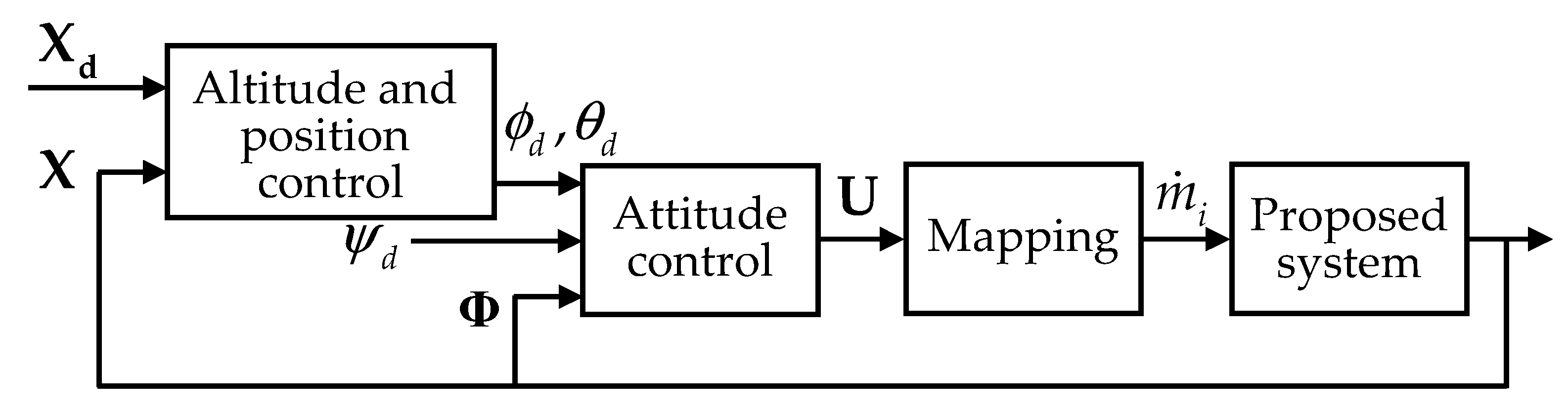
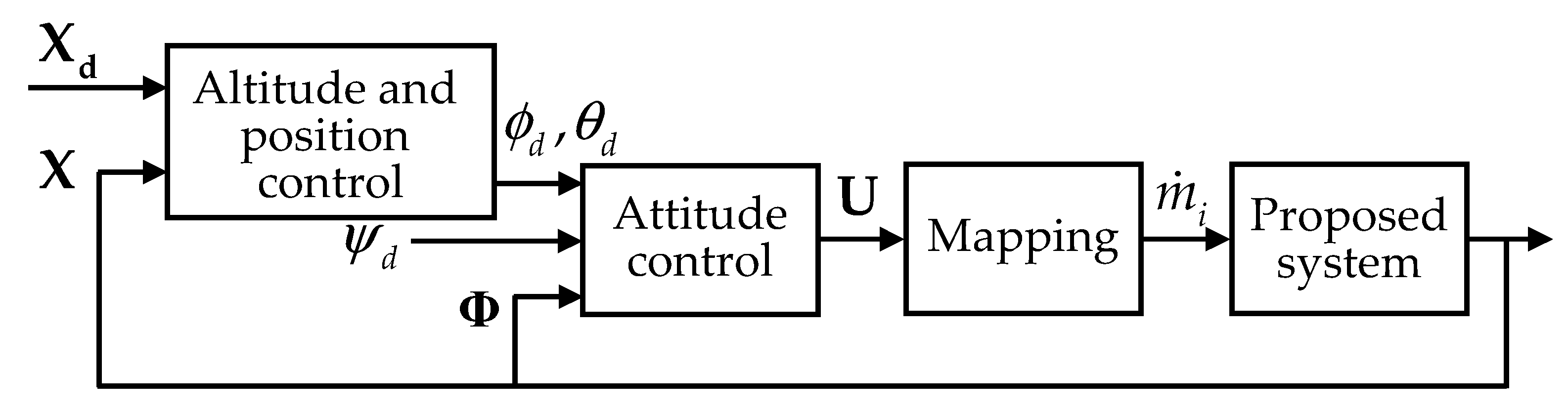
3. Control System Design
3.1. Altitude and Position Control
3.2. Attitude Control
3.3. Comparative Control Methods
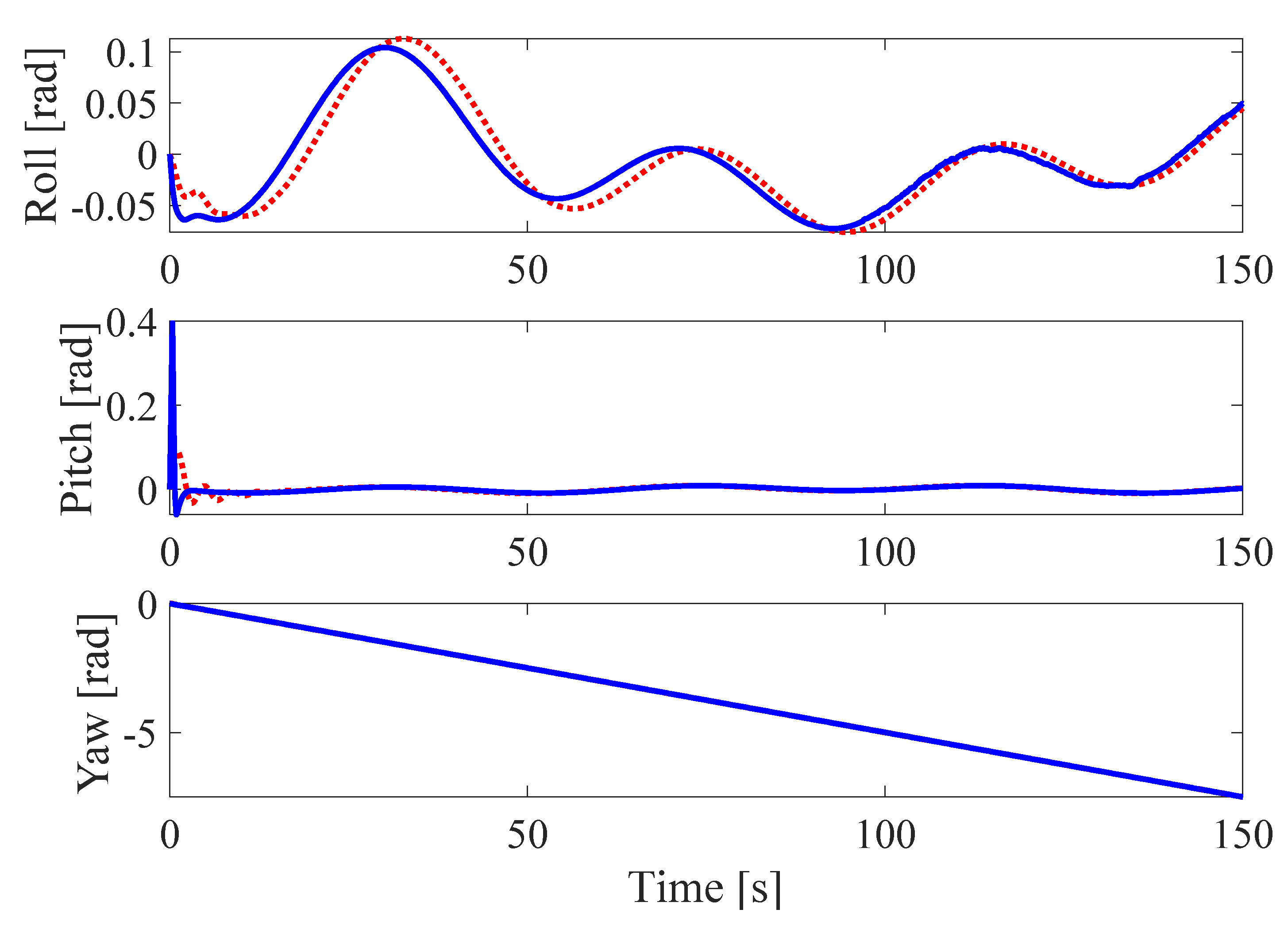
4. Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liljeback, P.; Stavdahl, O.; Beitnes, A. SnakeFighter—Development of a Water Hydraulic Fire Fighting Snake Robot. In Proceedings of the 2006 9th International Conference on Control, Automation, Robotics and Vision, Singapore, 5–8 December 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Kim, J.-H.; Jo, S.; Lattimer, B.Y. Feature Selection for Intelligent Firefighting Robot Classification of Fire, Smoke, and Thermal Reflections Using Thermal Infrared Images. J. Sens. 2016, 2016, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Bogue, R. The role of robots in firefighting. Ind. Robot Int. J. Robot. Res. Appl. 2021, 48, 174–178. [Google Scholar] [CrossRef]
- Shark Robotics Colossus. Available online: https://www.shark-robotics.com/ (accessed on 16 October 2021).
- Howe & Howe Thermite. Available online: https://www.howeandhowe.com/civil/thermite (accessed on 16 October 2021).
- Spurny, V.; Pritzl, V.; Walter, V.; Petrlik, M.; Baca, T.; Stepan, P.; Zaitlik, D.; Saska, M. Autonomous Firefighting Inside Buildings by an Unmanned Aerial Vehicle. IEEE Access 2021, 9, 15872–15890. [Google Scholar] [CrossRef]
- Saikin, D.A.; Baca, T.; Gurtner, M.; Saska, M. Wildfire Fighting by Unmanned Aerial System Exploiting Its Time-Varying Mass. IEEE Robot. Autom. Lett. 2020, 5, 2674–2681. [Google Scholar] [CrossRef]
- Pham, H.X.; La, H.M.; Feil-Seifer, D.; Deans, M.C. A Distributed Control Framework of Multiple Unmanned Aerial Vehicles for Dynamic Wildfire Tracking. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1537–1548. [Google Scholar] [CrossRef] [Green Version]
- Ausonio, E.; Bagnerini, P.; Ghio, M. Drone Swarms in Fire Suppression Activities: A Conceptual Framework. Drones 2021, 5, 17. [Google Scholar] [CrossRef]
- Ghamry, K.A.; Kamel, M.A.; Zhang, Y. Multiple UAVs in forest fire fighting mission using particle swarm optimization. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1404–1409. [Google Scholar] [CrossRef]
- Zapata, F. Maneuvering and Stability Control System for Jet-Pack. US Patent 2014/0103165, 17 April 2014. [Google Scholar]
- Li, R. Personal Propulsion Device 2007. US Patent 7,900,867, 8 March 2011. [Google Scholar]
- Naidoo, J.E. Modelling, Design and Analysis of a Water Jetpack Powered by an Autonomous Underwater Vehicle (AUV) System. Master’s Thesis, University of KwaZulu-Natal, Pietermaritzburg, South Africa, 2017. [Google Scholar]
- Robinson, B. Water Propelled Flying Board. US Patent 9,145,206, 30 October 2015. [Google Scholar]
- Li, R. Personal Propulsion Devices with Improved Balance. Spain Patent 2 659 042, 8 November 2014. [Google Scholar]
- Liu, X.; Zhou, H. Unmanned Water-Powered Aerial Vehicles: Theory and Experiments. IEEE Access 2019, 7, 15349–15356. [Google Scholar] [CrossRef]
- Jetovator. Available online: https://www.jetovator.com/ (accessed on 16 October 2021).
- Ando, H.; Ambe, Y.; Ishii, A.; Konyo, M.; Tadakuma, K.; Maruyama, S.; Tadokoro, S. Aerial Hose Type Robot by Water Jet for Fire Fighting. IEEE Robot. Autom. Lett. 2018, 3, 1128–1135. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Ambe, Y.; Ando, H.; Konyo, M.; Tadakuma, K.; Maruyama, S.; Tadokoro, S. A Mechanical Approach to Suppress the Oscillation of a Long Continuum Robot Flying with Water Jets. IEEE Robot. Autom. Lett. 2019, 4, 4346–4353. [Google Scholar] [CrossRef]
- Yamauchi, Y.; Ambe, Y.; Konyo, M.; Tadakuma, K.; Tadokoro, S. Passive Orientation Control of Nozzle Unit with Multiple Water Jets to Expand the Net Force Direction Range for Aerial Hose-Type Robots. IEEE Robot. Autom. Lett. 2021, 6, 5634–5641. [Google Scholar] [CrossRef]
- Thorncroft, G.E.; Ridgely, J.R.; Pascual, C.C. Hydrodynamics and thrust characteristics of a water-propelled rocket. Int. J. Mech. Eng. Educ. 2009, 37, 241–261. [Google Scholar] [CrossRef]
- Niku, S.B. Introduction to Robotics: Analysis, Control, Applications; John Wiley & Sons: Hoboken, NJ, USA, 2020; ISBN 1119527627. [Google Scholar]
- Peraire, J.; Widnall, S. Lecture L29-3D Rigid Body Dynamics. Dynamics 2009. Fall, Version 2.0. Available online: http://ckw.phys.ncku.edu.tw/public/pub/Notes/PathIntegral/Kleinert/01._Fundamentals/junk/MIT16_07F09_Lec29.pdf (accessed on 4 October 2021).
- Munson, B.R.; Young, D.F.; Okiishi, T.H. Fundamentals of fluid mechanics. Fundam. Fluid Mech. 1994. [Google Scholar] [CrossRef]
- Grimholt, C.; Skogestad, S. Optimal PID control of double integrating processes. IFAC-PapersOnLine 2016, 49, 127–132. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S.K. Robust Backstepping Trajectory Tracking Control of a Quadrotor with Input Saturation via Extended State Observer. Appl. Sci. 2019, 9, 5184. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value | Unit |
|---|---|---|---|
| Mass of the head part | 2 | kg | |
| Moment of inertia matrix | kg·m2 | ||
| Configuration parameters of the nozzle | 0.5, 0.4, 0.1 | m | |
| Nozzle angle to the | 45 | deg | |
| The cross-sectional area of the water hose | 4.9110−4 | m2 | |
| The cross-sectional area of the nozzle | 7.8510−5 | m2 | |
| Correction factor | 1.5 | - |
| Gains | Values | Gains | |
|---|---|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, D.-H.; Huynh, T.; Kim, Y.-B.; Soumayya, C. Motion Control System Design for a Flying-Type Firefighting System with Water Jet Actuators. Actuators 2021, 10, 275. https://doi.org/10.3390/act10100275
Lee D-H, Huynh T, Kim Y-B, Soumayya C. Motion Control System Design for a Flying-Type Firefighting System with Water Jet Actuators. Actuators. 2021; 10(10):275. https://doi.org/10.3390/act10100275
Chicago/Turabian StyleLee, Dong-Hun, Thinh Huynh, Young-Bok Kim, and Chakir Soumayya. 2021. "Motion Control System Design for a Flying-Type Firefighting System with Water Jet Actuators" Actuators 10, no. 10: 275. https://doi.org/10.3390/act10100275
APA StyleLee, D.-H., Huynh, T., Kim, Y.-B., & Soumayya, C. (2021). Motion Control System Design for a Flying-Type Firefighting System with Water Jet Actuators. Actuators, 10(10), 275. https://doi.org/10.3390/act10100275