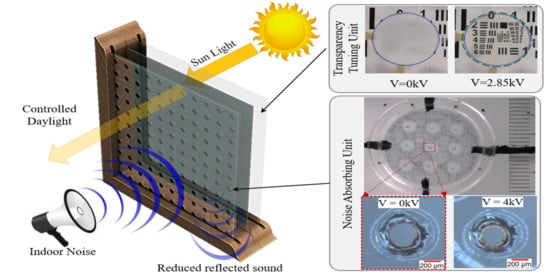
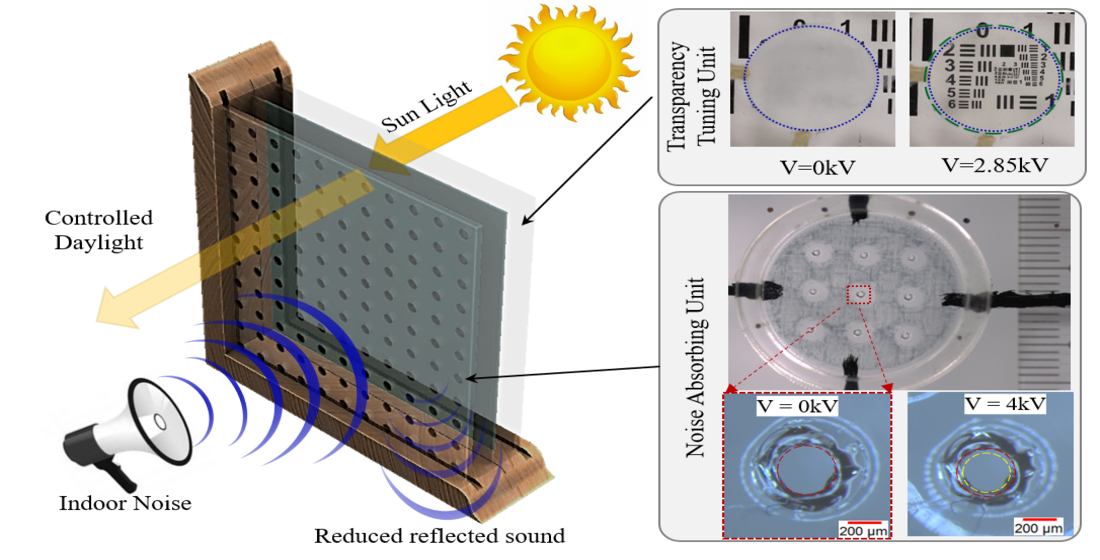
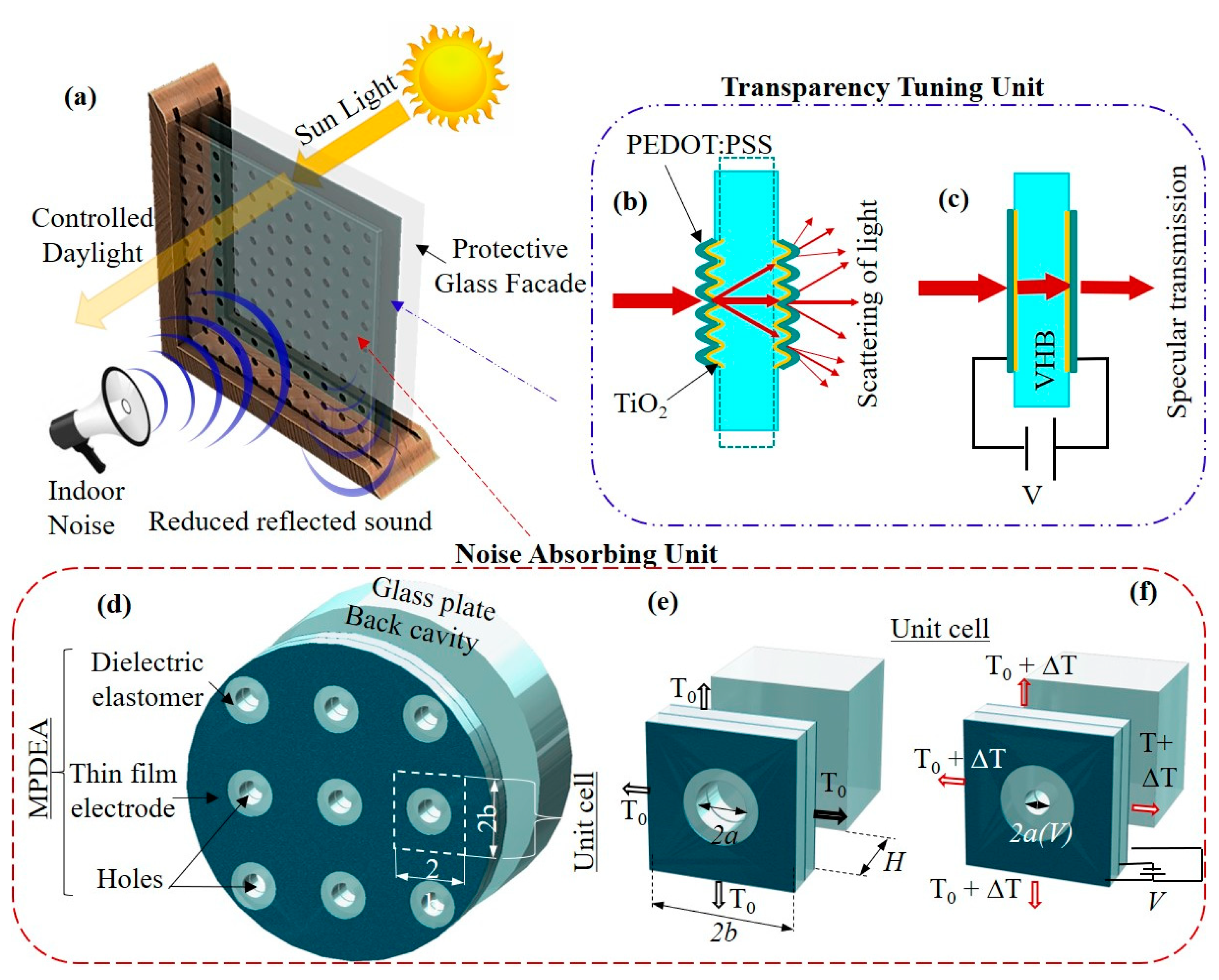
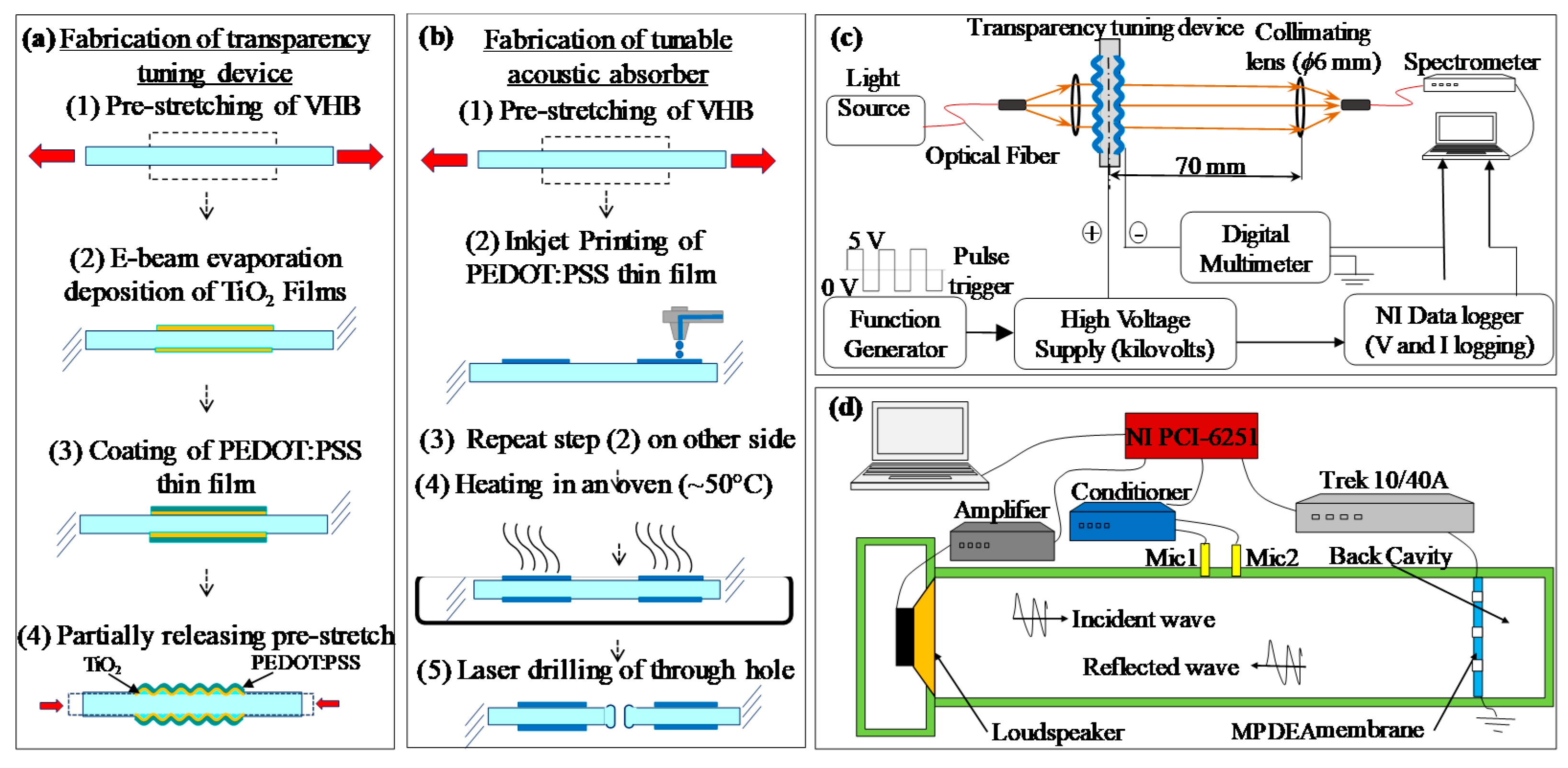
Dielectric Elastomer Actuator-Based Multifunctional Smart Window for Transparency Tuning and Noise Absorption





Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Theory
3. Experiments
4. Results and Discussion
4.1. Transparency Tuning Device
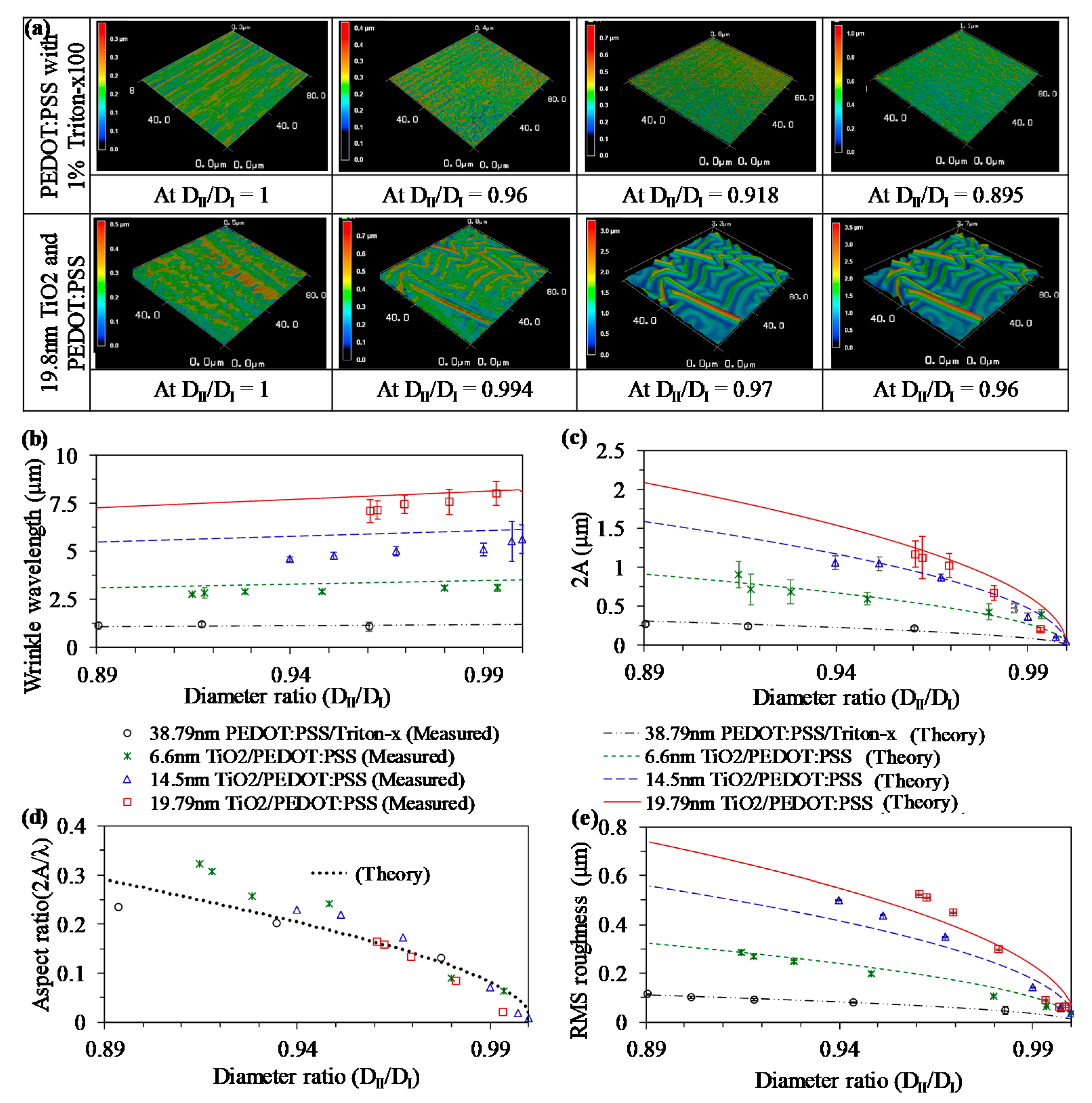
4.1.1. Effect of Thin Film Thickness and Elastic Modulus on Microwrinkles
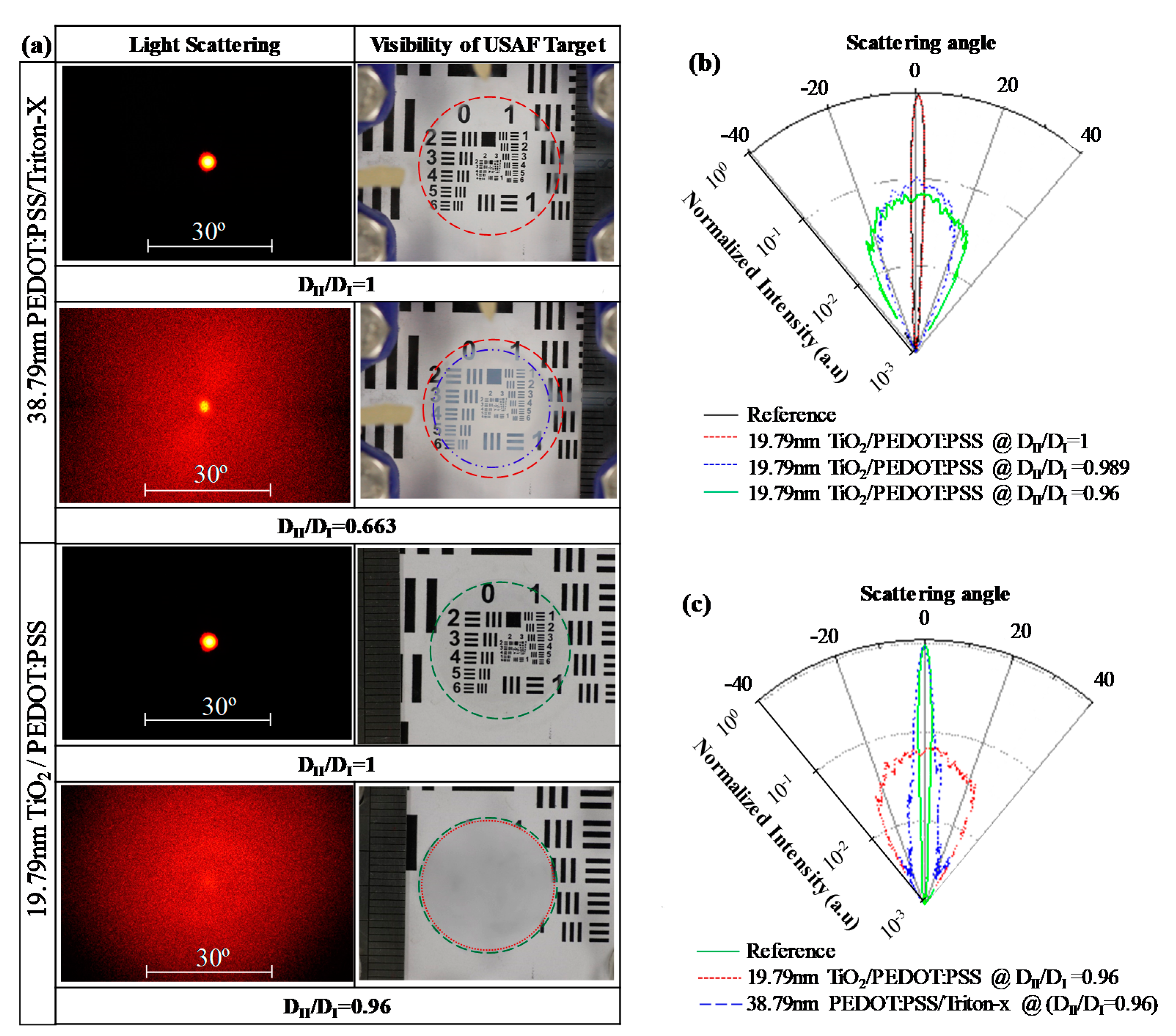
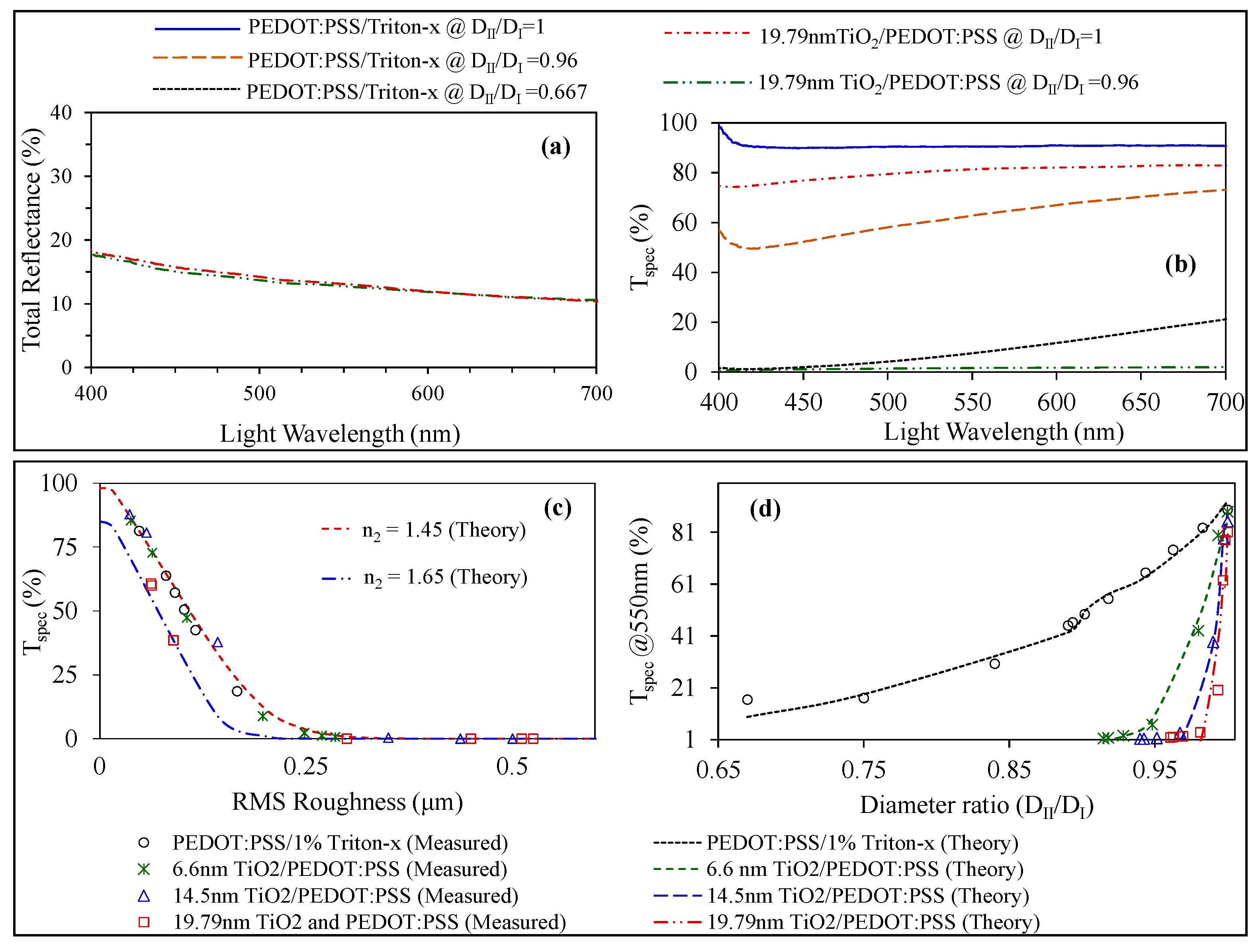
4.1.2. Scattering of Light for Transparency Tuning
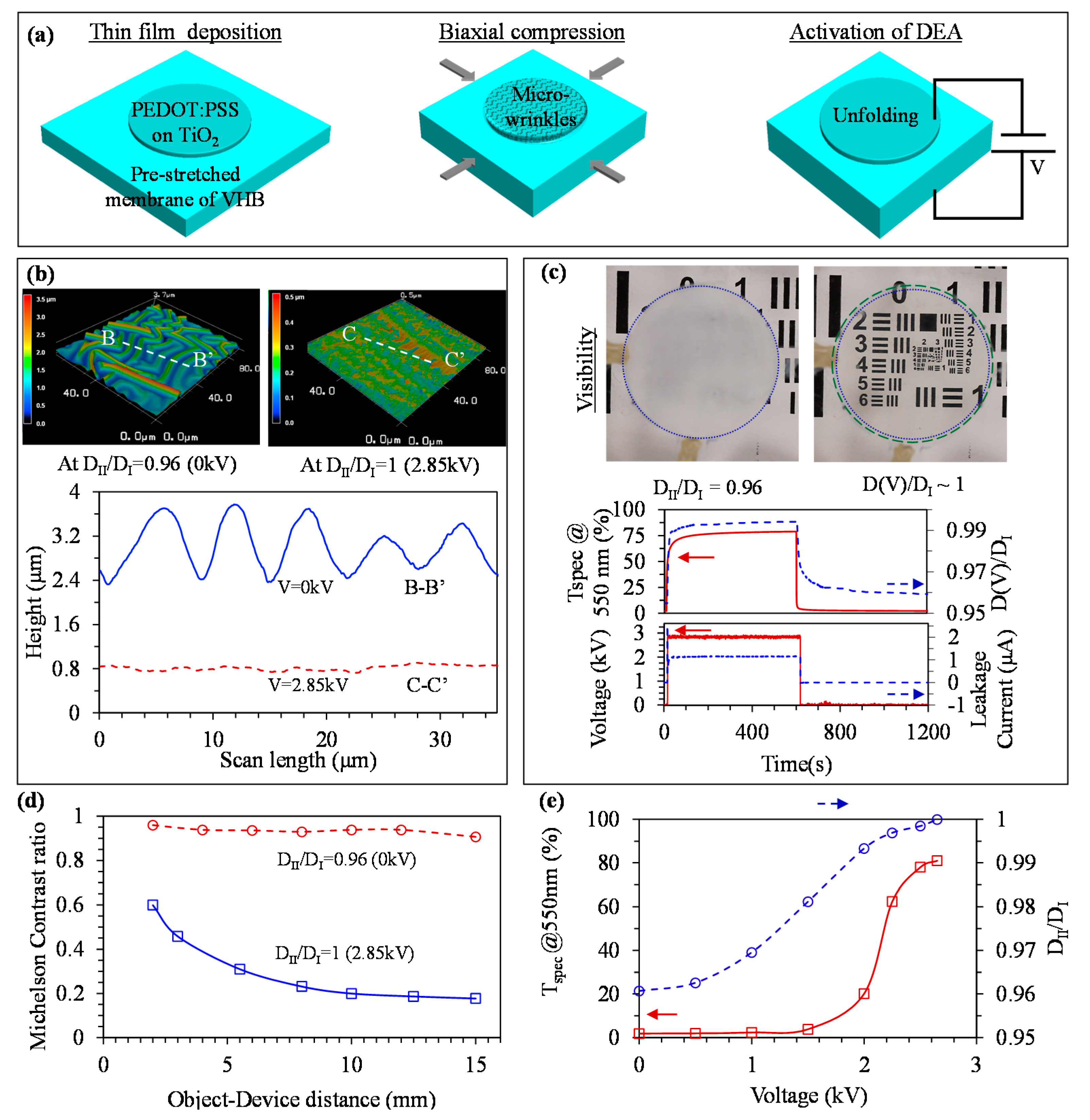
4.1.3. Electrically Tuning the Transparency
4.2. Tunable Acoustic Absorber
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cox, T.J.; D’antonio, P. Acoustic Absorbers and Diffusers: Theory, Design and Application; CRC Press: London, UK; New York, NY, USA, 2009. [Google Scholar]
- Gerriets-GmbH. Absorber Light. Available online: https://www.gerriets.com/us/absorber-light-8172 (accessed on 1 December 2018).
- Lampert, C.M. Chromogenic smart materials. Mater. Today 2004, 7, 28–35. [Google Scholar] [CrossRef]
- Granqvist, C.G. Electrochromics for smart windows: Oxide-based thin films and devices. Thin Solid Films 2014, 564, 1–38. [Google Scholar] [CrossRef]
- Doane, J.W.; Vaz, N.A.; Wu, B.G.; Žumer, S. Field controlled light scattering from nematic microdroplets. Appl. Phys. Letters 1986, 48, 269–271. [Google Scholar] [CrossRef]
- Drzaic, P.S. Polymer dispersed nematic liquid crystal for large area displays and light valves. J. Appl. Phys. 1986, 60, 2142–2148. [Google Scholar] [CrossRef]
- Baetens, R.; Jelle, B.P.; Gustavsen, A. Properties, requirements and possibilities of smart windows for dynamic daylight and solar energy control in buildings: A state-of-the-art review. Solar Energy Mater. Solar Cells 2010, 94, 87–105. [Google Scholar] [CrossRef]
- Zang, J.; Ryu, S.; Pugno, N.; Wang, Q.; Tu, Q.; Buehler, M.J.; Zhao, X. Multifunctionality and control of the crumpling and unfolding of large-area graphene. Nat. Mater. 2013, 12, 321–325. [Google Scholar] [CrossRef]
- Ong, H.-Y.; Shrestha, M.; Lau, G.-K. Microscopically crumpled indium-tin-oxide thin films as compliant electrodes with tunable transmittance. Appl. Phys. Lett. 2015, 107, 132902. [Google Scholar] [CrossRef]
- Van den Ende, D.; Kamminga, J.D.; Boersma, A.; Andritsch, T.; Steeneken, P.G. Voltage-controlled surface wrinkling of elastomeric coatings. Adv. Mater. 2013, 25, 3438–3442. [Google Scholar] [CrossRef]
- Görrn, P.; Cao, W.; Wagner, S. Isotropically stretchable gold conductors on elastomeric substrates. Soft Matter. 2011, 7, 7177. [Google Scholar] [CrossRef]
- Thomas, A.V.; Andow, B.C.; Suresh, S.; Eksik, O.; Yin, J.; Dyson, A.H.; Koratkar, N. Controlled crumpling of graphene oxide films for tunable optical transmittance. Adv. Mater. 2015, 27, 3256–3265. [Google Scholar] [CrossRef]
- Kang, J. An acoustic window system with optimum ventilation and daylighting performance. Noise Vib. Worldw. 2006, 37, 9–17. [Google Scholar] [CrossRef]
- Asdrubali, F.; Pispola, G. Properties of transparent sound-absorbing panels for use in noise barriers. J. Acoust. Soc. Am. 2007, 121, 214–221. [Google Scholar] [CrossRef]
- Struiksma, A.; Tenpierik, M.; Snijder, A.; Veer, F.; Botterman, B.; Hornikx, M.; van der Water, H.; Migchielsen, F. Sound absorbing glass: Transparent solution for poor acoustics of monumental spaces. SPOOL 2017, 4, 53–58. [Google Scholar]
- Soundproofing-Windows.net. Soundproofing Windows with Double and Triple Glazing. Available online: http://soundproofing-windows.net/index.php/soundproofing-windows-with-double-and-triple-glazing (accessed on 1 December 2018).
- Shrestha, M.; Lau, G.-K. Tunable window device based on micro-wrinkling of nanometric zinc-oxide thin film on elastomer. Optics Lett. 2016, 41, 4433. [Google Scholar] [CrossRef]
- Shrestha, M.; Asundi, A.; Lau, G.-K. Smart Window Based on Electric Unfolding of Microwrinkled TiO2 Nanometric Films. ACS Photonics 2018, 5. [Google Scholar] [CrossRef]
- Beckmann, P.; Spizzichino, A. The Scattering of Electromagnetic Waves from Rough Surfaces; Artech House, Inc.: Norwood, MA, USA, 1987; 511p. [Google Scholar]
- Eastman, J. Surface Scattering in Optical Interference Coatings; University of Rochester: New York, NY, USA, 1974. [Google Scholar]
- Zeman, M.; van Swaaij, R.A.C.M.M.; Metselaar, J.W.; Schropp, R.E.I. Optical modeling of a-Si:H solar cells with rough interfaces: Effect of back contact and interface roughness. J. Appl. Phys. 2000, 88, 6436–6443. [Google Scholar] [CrossRef]
- Keplinger, C.; Sun, J.-Y.; Foo, C.C.; Rothemund, P.; Whitesides, G.M.; Suo, Z. Stretchable, transparent, ionic conductors. Science 2013, 341, 984–987. [Google Scholar] [CrossRef]
- Lang, U.; Naujoks, N.; Dual, J. Mechanical characterization of PEDOT:PSS thin films. Synth. Met. 2009, 159, 473–479. [Google Scholar] [CrossRef]
- Lau, G.-K.; Heng, K.-R.; Ahmed, A.S.; Shrestha, M. Dielectric elastomer fingers for versatile grasping and nimble pinching. Appl. Phys. Lett. 2017, 110, 182906. [Google Scholar] [CrossRef]
- Lu, Z.; Shrestha, M.; Lau, G.-K. Electrically tunable and broader-band sound absorption by using micro-perforated dielectric elastomer actuator. Appl. Phys. Lett. 2017, 110, 182901. [Google Scholar] [CrossRef]
- Shrestha, M.; Lu, Z.; Lau, G.-K. Transparent tunable acoustic absorber membrane using inkjet printed PEDOT: PSS thin-film compliant electrodes. ACS Appl. Mater. Interfaces 2018, 10. [Google Scholar] [CrossRef] [PubMed]
- Shrestha, M. Smart window for tuning transparency and noise absorption. Ph.D. Thesis, Nanyang Technological University, Singapore, 2019. [Google Scholar]
- Shrestha, M.; Lu, Z.; Lau, G.K. Ink-jet Printing of Transparent and Stretchable Electrodes for Dielectric Elastomer Actuator. In Proceedings of the 3rd International Conference on Progress in Additive Manufacturing (Pro-AM 2018), Singapore, 14–17 May 2018; pp. 673–678. [Google Scholar] [CrossRef]
- Maa, D.-Y. Potential of microperforated panel absorber. J. Acoust. Soc. Am. 1998, 104.5, 2861–2866. [Google Scholar] [CrossRef]
- Herrin, D.; Liu, J. Properties and applications of microperforated panels. Sound Vib. 2011, 45, 6–9. [Google Scholar]
- Ginn, K. Architectural Acoustics; Brüel & Kjaer: Nærum, Denmark, 1978. [Google Scholar]
- Shian, S.; Clarke, D.R. Electrically tunable window device. Opt. Lett. 2016, 41, 1289–1292. [Google Scholar] [CrossRef]
- Rosset, S.; Shea, H.R. Flexible and stretchable electrodes for dielectric elastomer actuators. Appl. Phys. A 2012, 110, 281–307. [Google Scholar] [CrossRef]
- Li, C.; Cazzolato, B.; Zander, A. Acoustic impedance of micro perforated membranes: Velocity continuity condition at the perforation boundary. J. Acoust. Soc. Am. 2016, 139, 93–103. [Google Scholar] [CrossRef]
- Low, S.H.; Lau, G.K. Bi-axially crumpled silver thin-film electrodes for dielectric elastomer actuators. Smart Mater. Struct. 2014, 23, 125021. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shrestha, M.; Lau, G.-K.; Asundi, A.; Lu, Z. Dielectric Elastomer Actuator-Based Multifunctional Smart Window for Transparency Tuning and Noise Absorption. Actuators 2021, 10, 16. https://doi.org/10.3390/act10010016
Shrestha M, Lau G-K, Asundi A, Lu Z. Dielectric Elastomer Actuator-Based Multifunctional Smart Window for Transparency Tuning and Noise Absorption. Actuators. 2021; 10(1):16. https://doi.org/10.3390/act10010016
Chicago/Turabian StyleShrestha, Milan, Gih-Keong Lau, Anand Asundi, and Zhenbo Lu. 2021. "Dielectric Elastomer Actuator-Based Multifunctional Smart Window for Transparency Tuning and Noise Absorption" Actuators 10, no. 1: 16. https://doi.org/10.3390/act10010016
APA StyleShrestha, M., Lau, G.-K., Asundi, A., & Lu, Z. (2021). Dielectric Elastomer Actuator-Based Multifunctional Smart Window for Transparency Tuning and Noise Absorption. Actuators, 10(1), 16. https://doi.org/10.3390/act10010016