It is a great opportunity to provide leadership and focus for the creation of a badly needed journal for intelligent actuators. Certainly, the field is just emerging from a nominal state of science, performance, cost, and universality. Attached, I offer five sections to assist those who may wish to contribute to this journal:
We also invite notification of principal conferences, workshops, agency-funded research programs, government, industrial and academic development groups, etc.
1. Invited Journal Submissions
The following sections suggest a full range of new directions for intelligent actuators with emphasis on the electro-mechanical technologies. We are clearly on the verge of a new wave of technology based on the actuator as the enabling component of these systems that respond to human needs and reduce human drudgery. This requires expanded human choices, which means systems which make many alternate physical functions available to the human. The only means to do so is to increase the configuration choices with more intelligent actuators responding to human command. In 1950, the electronic valve was a dominant part of all radios, televisions, medical equipment, measurement systems, etc. These were expensive, inefficient, high maintenance, specialized by each supplier, of nominal standards, etc. By 1970, a new vision of miniaturized computer chips occurred, whose performance/cost ratio has continued to go up as forecasted (self-fulfilling) by Moore’s law. Cost went down, size went down, maintenance went down, etc., but the population went up under increasingly rigid interface standards. Hence, choices expanded beyond imagination, which impacts every human being.
Actuators today (there are a few exceptions), are like the electronic tubes of the 1950s. We still consider actuators to be too expensive, too specialized, of low performance, heavy, bulky, no standardized interfaces, etc. To design a new system based on actuators requires a one-off approach with specifications to an actuator supplier with a turn-around time in months, or even years. Hence, the paradigm is still to use as few actuators as possible and certainly not to open up the architecture of the system to permit its assembly on demand, provide for excess actuators to maximize reconfiguration, to enable fault tolerance, etc. The goal today is to avoid complexity, weight, cost, maintenance and resupply issues. This one-off approach is why many of our systems remain too expensive relative to their benefits to society (automobiles, aircraft, manufacturing cells, orthotics, surgical robots, etc.). This closed architecture stymies/limits rapid refreshment of electro-mechanical systems. It is claimed here that the intelligent actuator is the key to revolutionizing these systems, so we can enter into the Next Wave of Technology.
(1) Actuator Applications: Detailed requirements for actuators in any rewarding field.
(2) Survey of Suppliers: Who is in the market and what actuators do they now offer?
(3) Survey of Research Programs: What industrial or government programs now exist for research in actuators?
(4) Standardization: What actuator standards now exist and what standards should be developed?
(5) Domain-specific Minimum Sets: In each application domain (orthotics, automobiles, surgery, etc.), what would be a suggested minimum set of actuators to populate most systems in that domain?
(6) Certification: As with computer chips, actuator certification will be essential for each new actuator to enter the market. What sciences, parameters, measurements, etc. are involved in this certification process?
(7) Actuator Architecture: Increasing the number of functional choices in the actuator itself now becomes essential as proven by the response to the 2003 performance wall experienced by computer chips. What are those functional choices and how would they be embodied?
(8) Internal Sensors: Full actuator architecture requires real time full data awareness of all functional subsystems inside the actuators. Which are the essential sensors, what level of precision/uncertainty, what is the required sampling rate, etc., and how are they embodied?
(9) Prime Movers: At all scales, all actuators require controllable prime movers. Unique designs (speed, torque, efficiency, etc.) are invited.
(10) Gear Reducers: Because the human physical and time scales dominate this field, the prime mover, by itself, generally does not directly satisfy most human needs. The gear train must evolve like all other actuator components. Unique gear trains, their designs, basic science, etc. are invited.
(11) Actuator Intelligence: Data processing, operational decisions, response to human command, efficiency management, fault management, etc., all depend on a decision process embedded in operational software. All elements of this intelligence will be considered.
(12) Electronic Controllers/Power Supplies: Intelligence is embedded in an electronic controller which would best be included inside the actuator shell to minimize external connections and interface complexity. The power supply may be internal, or removed. It must manage power to the prime mover which, in combination, is not only nonlinear but contributes to the actuator’s efficiency, responsiveness, precision, etc.
(13) Actuator Design Process: As actuators become more complex, the design process must evolve to handle preliminary, in-depth, or redesign in minimum time to enable development of a minimum set to support cost-effective manufacture, just has been done for the computer chip
(14) Recommended Manufacture: A true and responsive supply chain requires multiple suppliers, each with specialized manufacturing approaches. Discussions of what has worked, what is needed, what is the on-going research is invited.
(15) Actuator Forecasts: Those with special management responsibilities can offer the community their experience-based judgment on science, design, operation, performance, cost, etc. that those entering the field of actuators can draw upon.
2. Next Wave of Technology (Based On Intelligent Actuators)
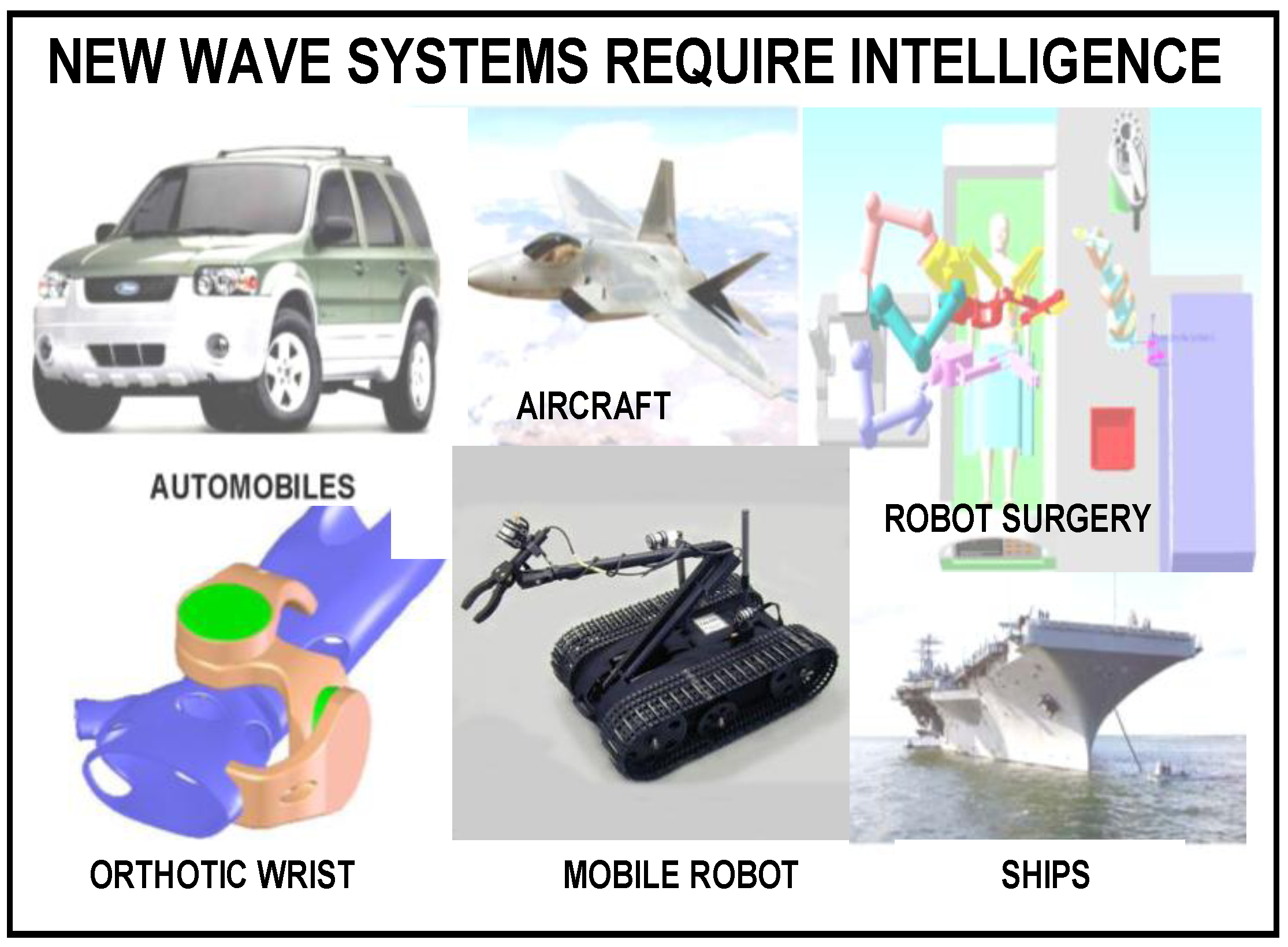
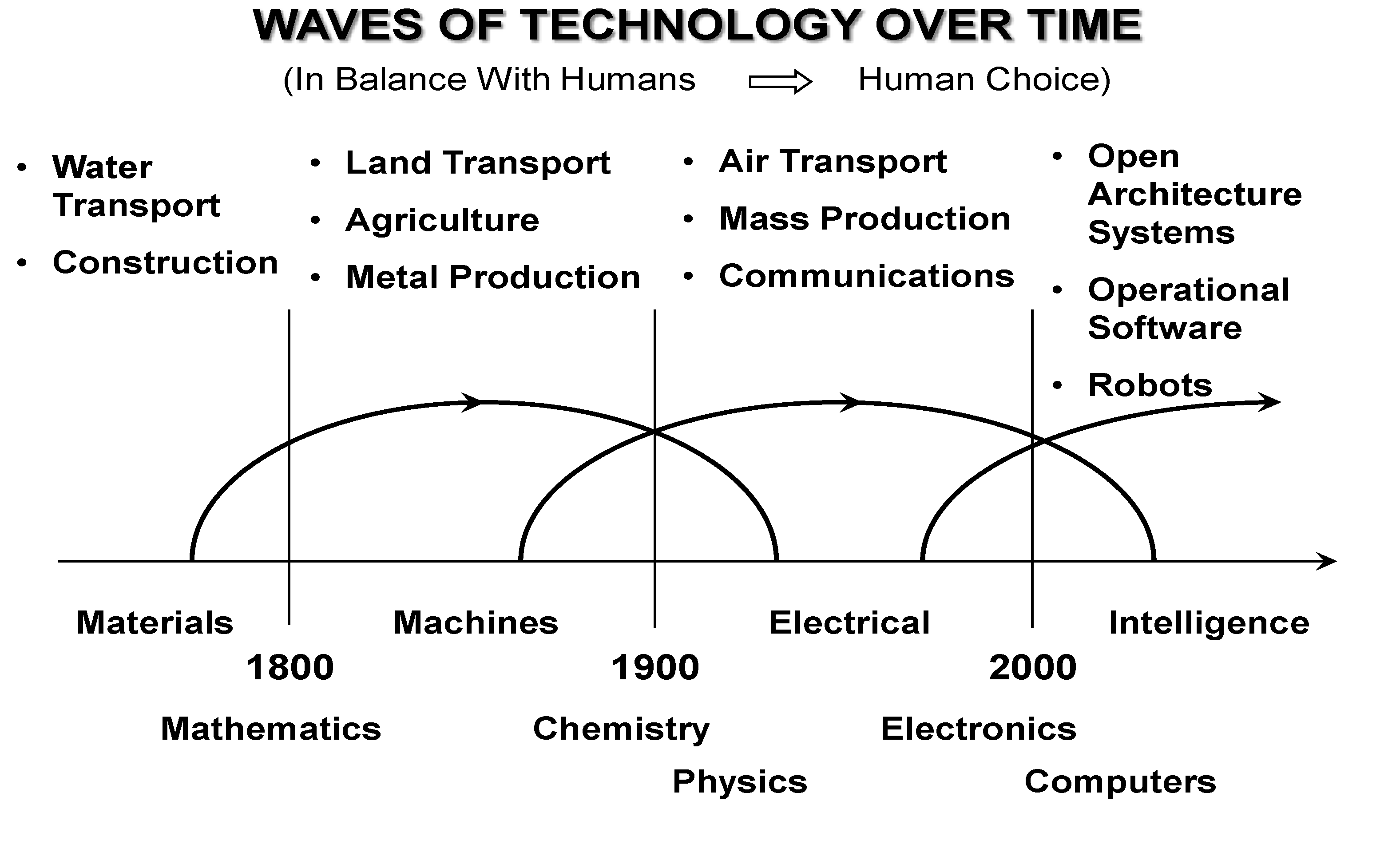
Overall Vision: The emphasis here is to build on the past breadth of applications for the disciplines of mechanical and electrical engineering, develop a completely modern science base for intelligent machines (assembled on demand) in order to create a new wave of technology building on the success of the last wave associated with computers (see chart below). This wave will have a greater impact than that provided by computers over the past 40 years by modernizing all our basic systems (aircraft, ships, manufacturing and construction equipment, automobiles, household appliances, etc.) moving into the field of robotics, reducing human drudgery, and enhancing the relationship between man and machine. A strong position on this technical option at this time would position interested parties to take leadership in a whole new economic activity of enormous magnitude (more so than computers). This new wave will be made of two major components. The hardware component is actuators (just as the computer chip is for computers – Intel Corp.) and the software component operates all machines made up of these actuators (just as Microsoft’s Windows runs all P.C.s). Electro-Mechanical actuators will drive anything that actively moves on cars, airplanes, ships, manufacturing systems (see chart below), space systems, human orthotics, prostheses, etc. It is more important than computer chips in the future economy. The software component enables intelligent control of these dexterous systems under direct human management and oversight (i.e., the emerging field of robotic surgery). The software for each application domain is universal; it provides for maximum performance (norms and envelopes prioritized by the human operator), condition based maintenance for timely repair (plug-and-play actuator replacement), and fault tolerance (on-line recovery from a fault to prevent loss of life or large economic-loss). Strong technical positions support this new wave argument, there is no uncertainty of purpose, a national resurgence in the core of mechanical engineering is feasible in the near term., etc. As suggested by the chart, we are just entering the new wave based on machine intelligence (to be extended to computational intelligence). In fact, it is claimed that now is the best time to be a young mechanical engineer in the past 100 years.
Figure 1.
Representative Next Wave of Technology (NWT) Open Architecture Systems Driven by Intelligent Actuators.
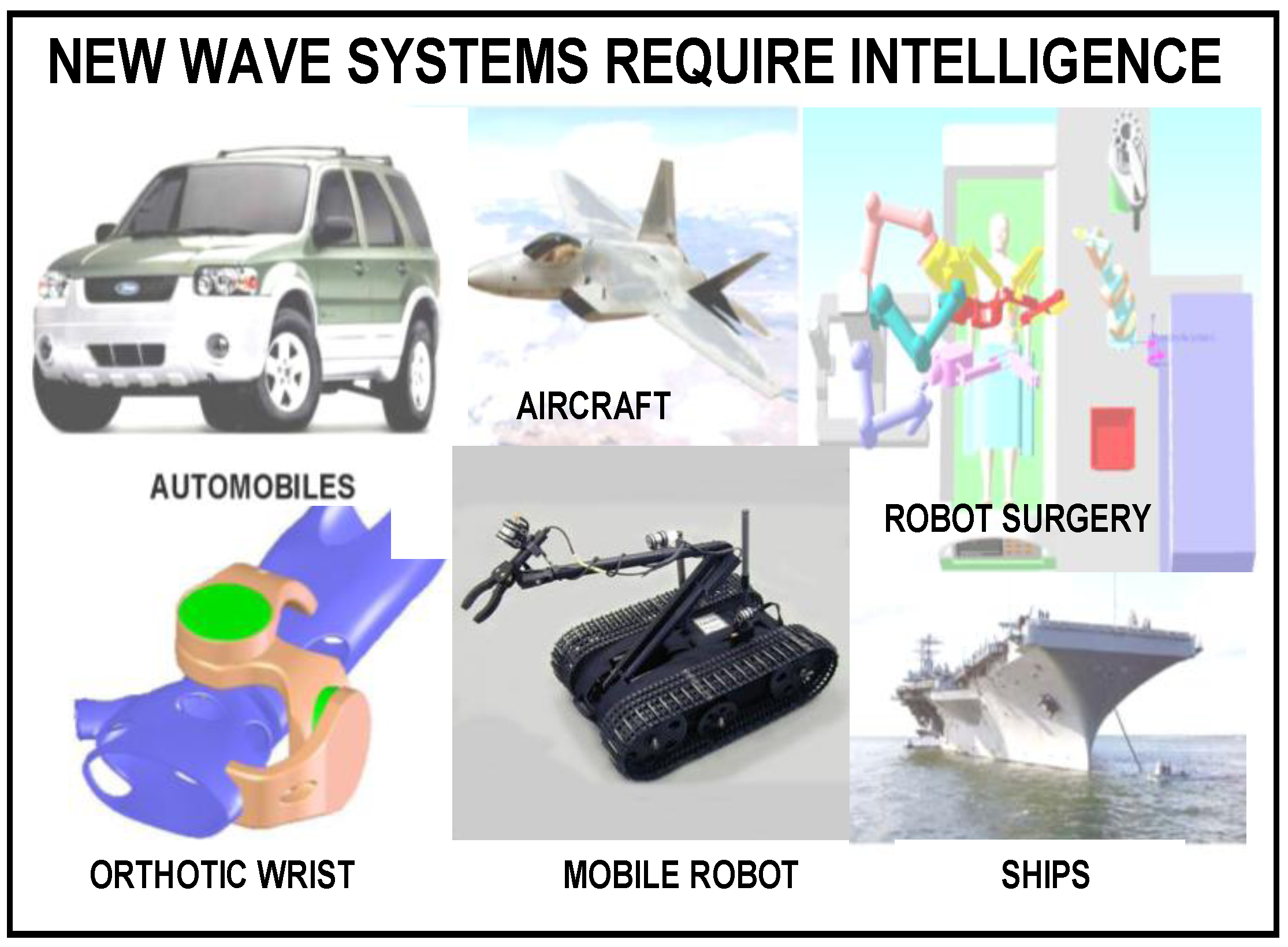
Figure 1.
Representative Next Wave of Technology (NWT) Open Architecture Systems Driven by Intelligent Actuators.
Figure 2.
Waves of Technology Over Time.
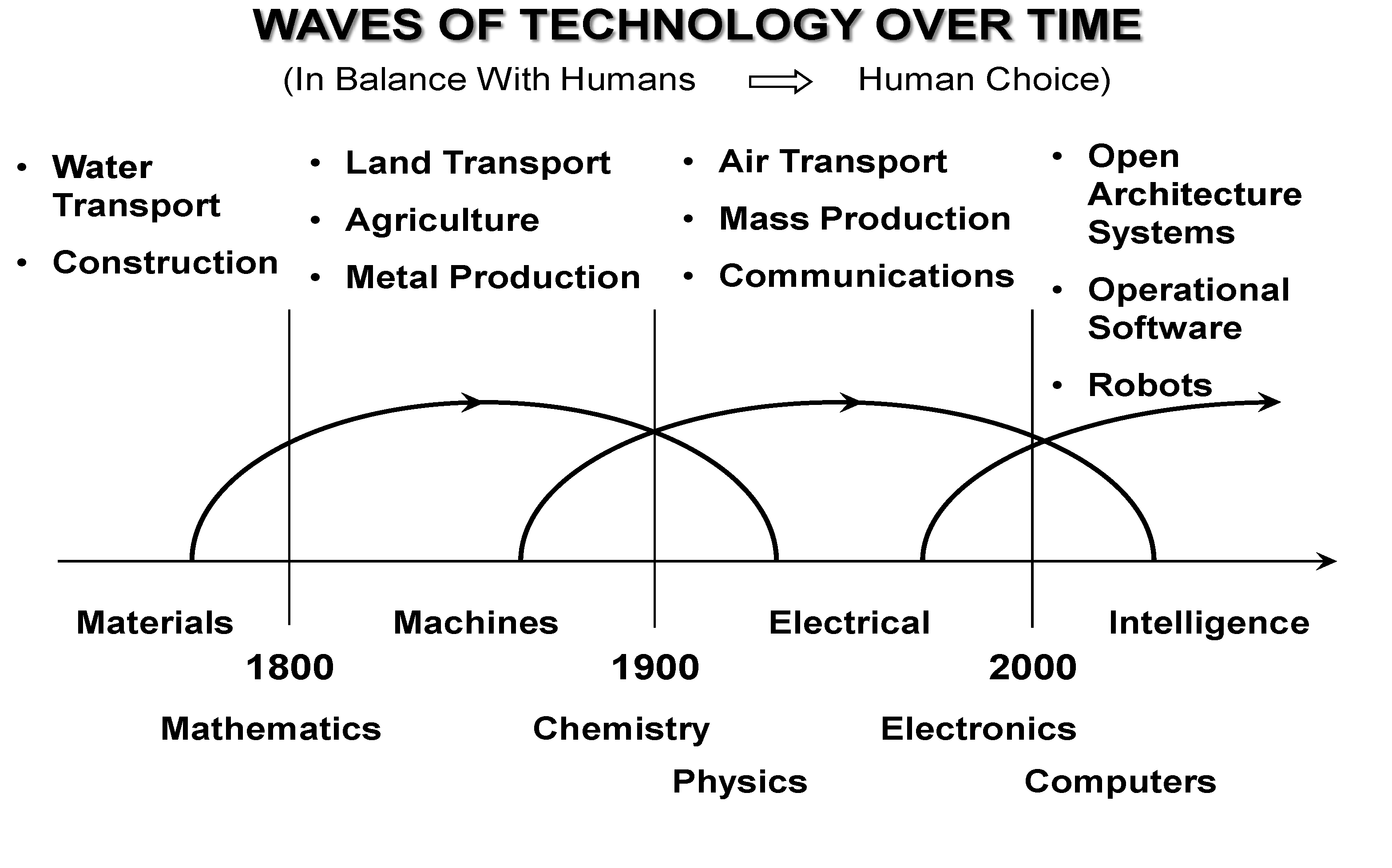
Figure 2.
Waves of Technology Over Time.
3. Actuator-Based High Impact Development
This is a compendium of major technical developments with high impact on the discipline of mechanical engineering; cost effective manufacturing of open architecture modular automobiles, robotics, aircraft, surgery systems, etc.; human enhanced performance and expanded human choice; and a family of modular armored vehicles assembled on demand. All of these have the basic building block of the intelligent actuator and machine intelligence to be in balance with human intelligence.
3.1. Next Wave of Technology (Based on Machine Intelligence)
We are now passing through the technical wave of computers, electronics, computer chips, and social media. The next wave will use Machine Intelligence (and its extension, Computational Intelligence) to dramatically expand human choice, to open up the architecture of electro-mechanical systems (cyber-physical systems), to assemble these systems on demand (to satisfy the customer on the spot), reduce their cost in terms of a minimum set of highly certified components from a responsive supply chain and do so while improving efficiency, safety, and performance.
3.2. Intelligent Actuators
Actuators drive everything that moves under human command. These standardized modules will be produced as a minimum set to create a maximum population of intelligent system solutions. The concentration of resources will need to exceed that which we now expend on our highly certified computer chips. This market is projected to exceed the computer chip market in twenty years if we meet ever-increasing human needs and respond to human choice. As with computer chips, there will be high, medium, and low-end actuators meeting specific sector needs. Also, this technology is expected to meet a performance wall (as did the computer chip in 2003) in ten years, requiring a generalized actuator architecture to strengthen further development (i.e., equivalent to the multi-core for computer chips).
3.3. Modular More-Electric Automobiles
The closed architecture of our automobiles is why costs are very high (perhaps 2× the true level of benefit) and why the technology is stagnated (a sluggish move towards higher efficiency and safety). Concentration in the U.S. is on power generation (hybrids, batteries, ultracaps, etc.). Almost no concentration (as in Europe, Japan, and China) is occurring for power utilization for enhanced drivability, safety, and efficiency. It is entirely possible to reduce cost by 2×, improve efficiency by 30 to 50%, and enhance safety by 3 to 5×. To do so, we must open up the car’s architecture, separate the body from the chassis, standardize all-wheel drive/suspension actuators, and make the car intelligent in balance with the driver through an enhanced human-machine interface.
3.4. Human Enhancement/Human Choice
Too little in-depth concern exists to self-regulate a person’s capacity to function under stress, to perform complex operations (as a surgeon), to predict patient medical events, and to interface with others in group operating units. Our recent military suicides and rogue actions give us a glimpse of the issue. This should be turned into a positive (i.e., in this case, miniaturized surgical systems for in-body operations, human rehabilitation, orthotics, and improved soldier performance monitoring and visualization). We need to treat the human as a truly complex system which needs further enhancement to maintain their personal well-being, perform higher-valued tasks, reduce human drudgery, and better meet real human needs.
3.5. Modern Open Architecture Battlefield Systems
The military may have 50(+) distinct armored, tactical and transport vehicles in the thousands, each with its own unique monolithic design and little parts commonality to reduce life-cycle cost. This lack of openness makes long-term requirement development very difficult because of more rapidly evolving threats. Refreshment and recapitalization costs go up while performance actually goes down. It now becomes possible to create families of vehicles composed of as much commonality of standardized component and system technologies from multiple suppliers as possible (this is feasible for each of the three vehicle classes). This open architecture approach makes refreshment a continuing process; under the decision control of the military’s program office, recapitalization would look forward (not backward) and the performance/cost ratio would continuously improve.
3.6. Enhanced Aircraft Safety
Unfortunately, our present hydraulic control surface actuation subsystem represents a large number of single-point failures (a threat to safety) and the hydraulic technology has long since reached its maximum maturity. It represents valving, pressure reservoirs, tubing, redundancy in control and actuation, and excess weight and maintenance. Further, it is difficult to modernize the system to make it truly intelligent. Recent development shows that it is feasible to create a whole new generation of fault tolerant/low weight/high performance electro-mechanical actuators to dramatically improve performance and safety while reducing weight and cost. This technology will permit fault avoidance, permit condition-based maintenance, and continuously give a performance assessment to alert ground crews of needed component replacement to result in rapid ground repair turnaround. Standardization in terms of a minimum set of actuators would dramatically reduce cost, reduce the need for a large inventory of spares, and reduce training costs.
4. Feasible Open Architecture Applications for Intelligent Actuators
4.1. Manufacturing Cells
Manufacturing cells represent the full integration of all component and system technologies to form a self contained system capable of process control, configuration management, rapid product change over, quick change out of cell modules for repair and tech mods, and to do so at reduced costs and enhanced performance. For example, an airframe assembly cell might contain 40 DOF involving two active assembly robots (7 DOF each), two supporting force robots (5 DOF each), and four rigidized fixturing robots (4 DOF each), all assembled on demand from standard modules (links, actuators, electronic controllers, operational software, etc.) exhibiting high performance (accuracy) and reduced life cycle cost (rapid module replacement and up-dates) and also moving towards condition-based maintenance (to permit operation by a nominally trained technician).
4.2. Miniaturized Surgical Systems
It is suggested to establish a framework for the development of modular manipulator systems to act as an extension of the human surgeon through a sophisticated visual and kinesthetic interface. The basic building block for this system would be a conceptual 2 DOF knuckle actuator module that can be scaled at ½″, ¾″, and 1″ to then be assembled into any set of DOF highly dexterous robotic systems from endoscopes (solid rods with a 2 DOF module at the end up to 10 DOF highly dexterous snake type systems). This dexterous open architecture system would be combined with a set of ten smart surgical tools (with quick-change interfaces) usable either directly by the surgeon or robotically as end-effector tools.
4.3. Human Rehabilitation Systems
The long-term goal is to dramatically expand the clinical rehabilitation choices to enable rapid assembly (on demand) of cost effective sensor-based systems to match initial and evolving motor support function needs of each individual patient. These modular exoskeleton HR systems would be assembled, managed, and maintained by the clinical technician using a configuration manager (software aid) and independently “supervised” by the patient with simple commands, such as stop, go slow, I’m tired, be stiff, more support, etc. This system rapidly decentralizes HR care by getting the patient out of the clinic into the home as rapidly as possible to quickly drive down costs.
4.4. Intelligent Actuators for Battlefield Systems
It is proposed to aggressively create an open architecture for mechanical systems for the battlefield (manned and unmanned multi-purpose mobile platforms) of all scales (from 30 lb. up to 70 tons), all to be driven and operated by a minimal set of advanced, intelligent standardized electro-mechanical actuators. Standardized interfaces would enable their rapid assembly (for repair in the field), to enable continuous insertion of upgraded modules, improving certification of performance and reliability, reducing the logistics footprint, and reducing costs because of larger production runs of a smaller set of actuator subsystems.
4.5. Disaster Robots
It is suggested to create an aggressive effort to develop a versatile and responsive technology base to rapidly deploy an open architecture robot technology to meet a wide spectrum of present and future man-made and natural disaster events. This system of technology would be deployed to evaluate and identify the threat and then request deployment of a robot system (platform, manipulator, tools, sensor suite, special weapons, navigation software, controller, etc.) assembled on demand to best meet the identified threat or disaster parameters. Elements of the required technology have been developed but no cohesive and focused effort exists either in government laboratories or in industry.
4.6. Battlefield Logistics
The goal is to use a balanced science and technology development and demonstration effort to automate, with minimal human intervention, a sustained seabasing material transfer function (from sea to shore and beyond). The electro-mechanical technologies to support this effort are just emerging into a high performance (load capacity, durability, intelligence) technology that can be deployed as an open architecture (modularity, assemble on demand) for rapid maintenance, refreshability, and certification in order to continuously improve its associated performance to cost ratio. It is now feasible to assemble this full system (small—5 ft., medium—8 ft., large—20 ft.) of manipulators and transport platforms from a minimal set of 18 highly certified actuator modules.
4.8. Open Architecture More-Electric Light Armored Vehicle
It is proposed to develop a more-electric, light vehicle fully armored with lower center of gravity, speed range up to 70 mph, and all principal components (engine, generator, ultra cap, air conditioning, etc.) protected within the V-shaped armored shell. This will be accomplished using electric hub wheels, an active suspension, and an exceptional power supply for high acceleration actuators. This open architecture system would be easily refreshed to insert updated modules even in the field.
4.9. Intelligent Actuators for Navy Ships
The goal would be to drive everything that moves on-board ships (submarine, aircraft carrier, etc.) with torque-dense electro-mechanical actuators. This step would remove all hydraulics from the ship (all pumps, reservoirs, piping, valving, hydraulic pistons, etc.) while making the ship more homogeneous in its control and operation while, in this case for an aircraft carrier, removing 500 personnel, reducing ship weight by 1,400,000 lbs., freeing up to 60,000 sq-ft. of floor space, reducing average maintenance of the affected systems by 2.7×, reducing their complexity by 2.2×, and reducing their power consumption by 2.7×.
4.10. Control Surface Actuators for Advanced Aircraft
The ultimate goal of an open architecture system approach is to dramatically reduce the design to deployment cycle time, use plug-and-play intelligent fault tolerant rotary actuators on the control surface hingeline wherever possible, enhance rapid repair and maintenance, reduce the threat of obsolescence, and even enable mission-specific systems to be configured on demand to best meet that mission’s unique performance parameters. This will be achieved by opening up the architecture of the aircraft with a carefully chosen level of granularity, standardize all quick-change interfaces for sufficient functionality, standardize each modular component to be provided by multiple suppliers, and enhance the level of certification by extensive testing to guarantee performance, durability, and survivability, while dramatically reducing weight.
4.11. All-Electric/Modular Automobile
The goal is to build on the investment in advanced battery technology to make automobiles all-electric, including intelligent drive wheels and active suspensions (for enhanced control in acceleration, braking, and evasive maneuvers), and a modern decision making software to balance/interpret operator inputs, maximize efficiency (to reduce demands on the battery), and to enhance durability, maintainability, refreshability, and cost effectiveness by using a plug-and-play architecture throughout the vehicle. All the supply chain lessons learned from the personal computer industry would then apply to the future electric car industry.
4.12. Wind Turbine
The goal is to create a revolutionary science and technology base to modernize wind turbine power generation, make it more efficient (perhaps 30% to 50%), lighter (up to 2.5×), and more cost effective (2.0x). This would be done by using low complexity gear trains to drive a single or multi-speed power generator, either fully integrated in the nacel or separated with the generator/controller at the base of the turbine pedestal.
4.13. Open Architecture Robotic Systems for Long Duration Space Missions
This development is intended to create a revolution in open architecture for robotic systems specifically targeted to the long duration space missions where a dramatic reduction in the mission weight associated with robotics (say up to 20×) in the related logistics trail (warehouse spares, maintenance regime, re-supply), in the design and testing cycles (to reduce obsolescence) and in the reduction in robot system cost to the mission (perhaps 10×) can be achieved.
4.14. Electro-Mechanical Actuators for Heavy Construction and Farm Machines
The goal is to modernize heavy machines used in construction (earth/ore excavation, moving and in battlefield operations (handling of boxed ammo and supplies) by using intelligent electro-mechanical actuators to replace all hydraulics. This intelligence enables operator prioritized operational software to enhance efficiency, durability, load capacity, etc. and leads to the application of condition-based maintenance to assess remaining useful life (and when replacement is required) with a minimum of false alarms.
4.15. Oil Recovery Operations
Deep sea oil drilling rigs, remote valving, pipeline laying and recovery, remote maintenance, etc., all require increasingly complex technology with better safety and emergency management. Down-hole drilling and pumping require specialized actuators. Drill stem pipe management should be increasingly automated. Underwater robots must increasingly perform complex functions (inspection, pipe joining by welding, valve replacement, etc.). All of this suggests a new generation of specialized actuators.
5. Technologies for Intelligent Actuators
5.1. Intelligence Is Essential to the Goal of a Full Electro-Mechanical Actuator Architecture
The goal is to establish a fully responsive actuator whose intelligence manages a sufficiently broad set of choices (performance, duality, layered control, force/motion, etc.) using carefully documented criteria (for prime mover, bearings, gear trains, power supply, and electronic controller) which when combined by fusion mathematics enables deployment to the widest range of systems (aircraft, ships, battlefield, space, manufacturing, surgery, etc.).
5.2. Sensor Fusion in Intelligent Actuators
The goal is to maximize performance under human command of a full spectrum of actuators made up of four basic components: power supply/electronics, prime mover/brake, bearings, gear train/tooth mesh. These components will be arranged in a full architecture of various classes and configurations: duality for fault tolerance, layered control for mixed scaled outputs, force/motion for combined functional tasks, multiple speed ratios for combined acceleration/torque level choices, etc. This increasing demand for human choice requires full awareness of the actuator’s condition and response capability which can only be achieved by means of a multi-sensor/measurand data generation array which can be fused (balanced) to provide decision information in real time.
5.3. Actuator Criteria Based Decisions
The reality of mechanical devices is that they are highly nonlinear and their operational parameters drift over time due to aging and extended operation. Increasingly, these devices are becoming more complex, and the user community wants continued improved performance at lower costs. This implies working closer and closer to the operational margins of the device (its torque, acceleration, temperature, endurance, etc.). This means that classical methods of control based on simplistic linearized models can no longer be the basis for continued growth in the technology. Because of our ever-improving computational capability, we can replace the antiquated analog approach with a digital approach based on quantitative parametric description (what may be called the “model” reference) of the mechanical system and its real time “sensor” reference derived from a full array of internal sensors
5.4. Condition Based Maintenance for Intelligent Actuators
The goal is to monitor the performance capability over time of intelligent actuators as principal drivers of mechanical systems. These actuators represent more resources to perform their function under human command (duality for fault tolerance, layered control, force/motion control, multi-speed operation, etc.). Because of this complexity (sensor array, power supply, electronic controller, prime mover, bearings, gear train, tooth mesh), sources of degradation can come from many components in the actuator. This degradation now demands a formal analysis for predicting performance reduction, reviewing useful life, time at which replacement is warranted, etc., with increasing accuracy and, therefore, reduced false alarms.
5.5. Actuator Management Operational Software (AMOS)
Actuator embedded software is essential to provide functionality like motor commutation, communication, data processing, and implementation of various features that collectively contribute to actuator intelligence, namely, criteria-based decision-making algorithms, Condition-Based Maintenance (CBM) routines etc. Information from sensors has to be analyzed, interpreted and manipulated systematically in software to produce information of value to the higher levels of the control hierarchy. Efforts are currently underway to formalize the framework for such software for intelligent EMAs, christened as Actuator Management Operational Software (AMOS). The envisioned structure of AMOS provides EMAs the ability to assess and alter its operating capabilities through a multi-sensor environment.
5.6. Fault Tolerant Actuators (for Enhanced Aircraft Safety)
Present aircraft control surfaces are operated by electro-hydraulic actuators that require a distributed mix of wiring, tubing, connections, valving, hydraulic servo valves and pistons, hydraulic reservoirs, etc. It is suggested to create an intelligent electrical actuator (both rotary and linear) for a more-electric aircraft that would provide a homogeneous technology, which is not only simpler (smaller number of parts), it is fault tolerant with no single point failures (ensuring operation even under a major fault), it reduces the overall actuation subsystem weight by more than fifty percent, and it significantly reduces total ownership cost (because the logistics trail has been dramatically curtailed).
5.7. Forward/Inverse Decision Making
The goal is to create a formal decision making process which is essential to provide structure for the operation of nonlinear mechanical systems. For intelligent actuators, this requires that there be a direct coupling among the control parameters (voltage, current, turn-on/turn-off angles, etc.), the reference parameters (position, velocity, acceleration, temperature, etc.) and the operational parameters (load, noise, vibrations, etc.). This appears to demand forward and inverse computation procedures that accommodate uncertainty in the sensor data to create the decision surfaces (the forward procedure) and choices among all the input and reference parameters from desired point choices on the decision surfaces (the inverse procedure).

{kind=link}
{kind=link}