
Influence and Optimization Analysis of Servo Stroke Curve Design on Adhesive Wear in Deep Drawing of Tantalum


Abstract
:1. Introduction
2. Optimization Methods
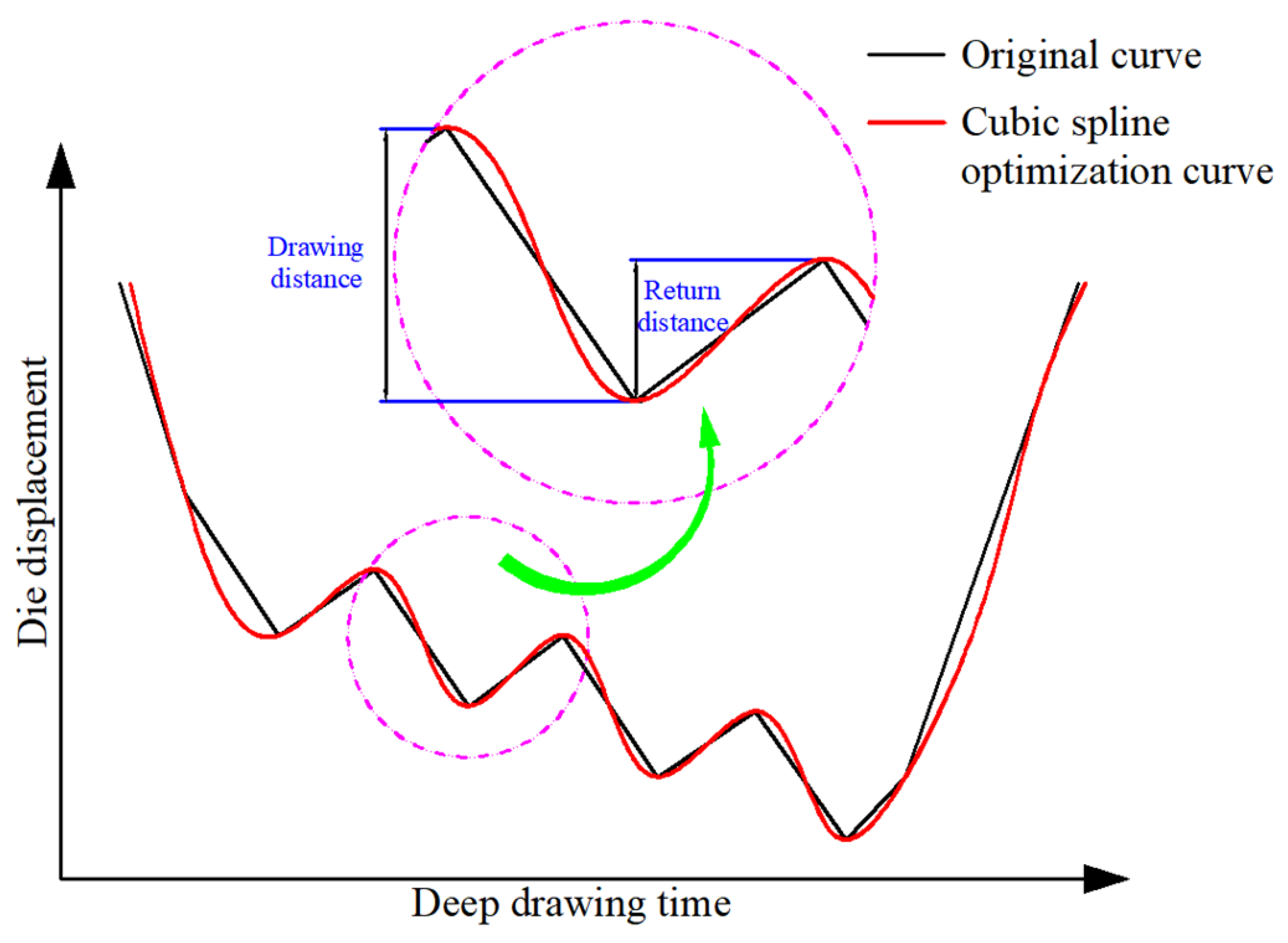
2.1. Cubic Spline Fit Optimization
- (1)
- The natural spline:
- (2)
- The first derivative of a given endpoint:
- (3)
- The second derivative of a given endpoint:
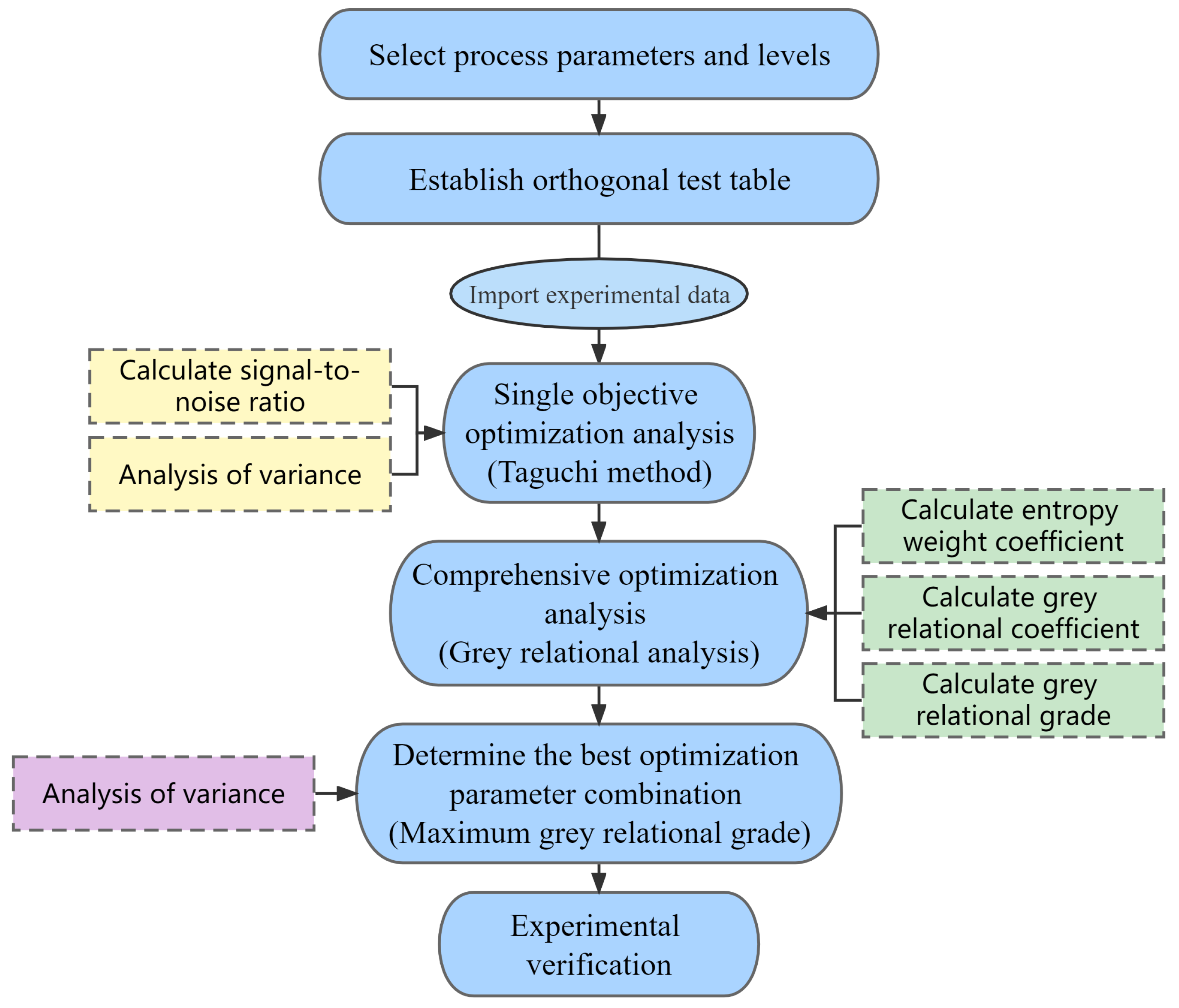
2.2. Taguchi Grey Relational Optimization Method
- (1)
- Nominal−is−best case:where represents the signal-to-noise ratio (s/n), is the mean value of the response of the test group, is the standard deviation of the response of the test group, is the mass response value in the test, and n is the number of tests in each experiment.
- (2)
- Larger−is−better case:
- (3)
- Smaller−is−better case:
- (1)
- The higher the better:
- (2)
- Nominal is best:
- (3)
- The lower the better:where , , is the normalized value of the quality characteristic in the sequence, is the expected value of the quality characteristic, max is the maximum value of , min is the minimum value of , n is the number of experiments, and m is the number of quality characteristics.
3. Experiment Details
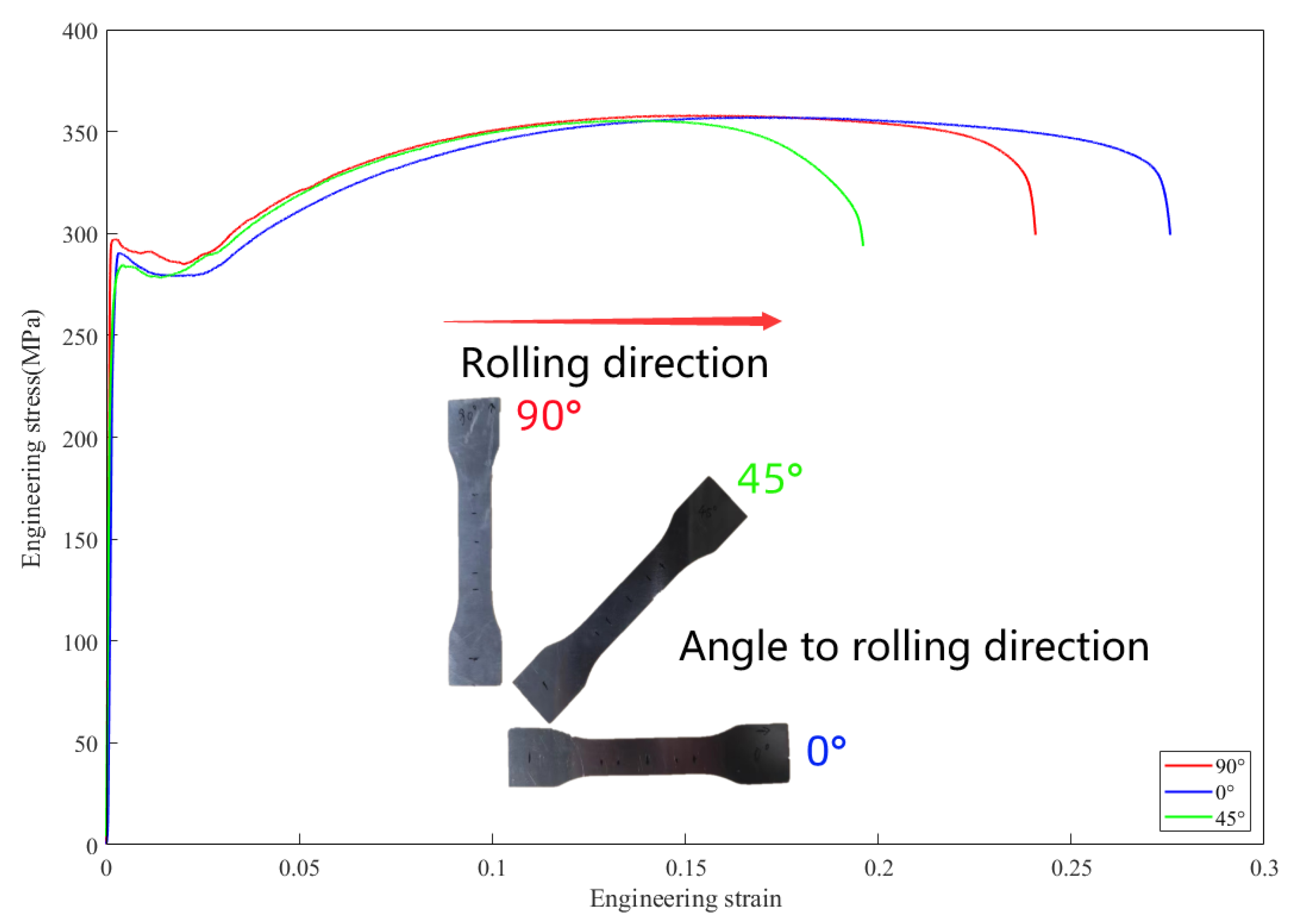
3.1. Test for Material Property
3.2. Material Constitutive Equation
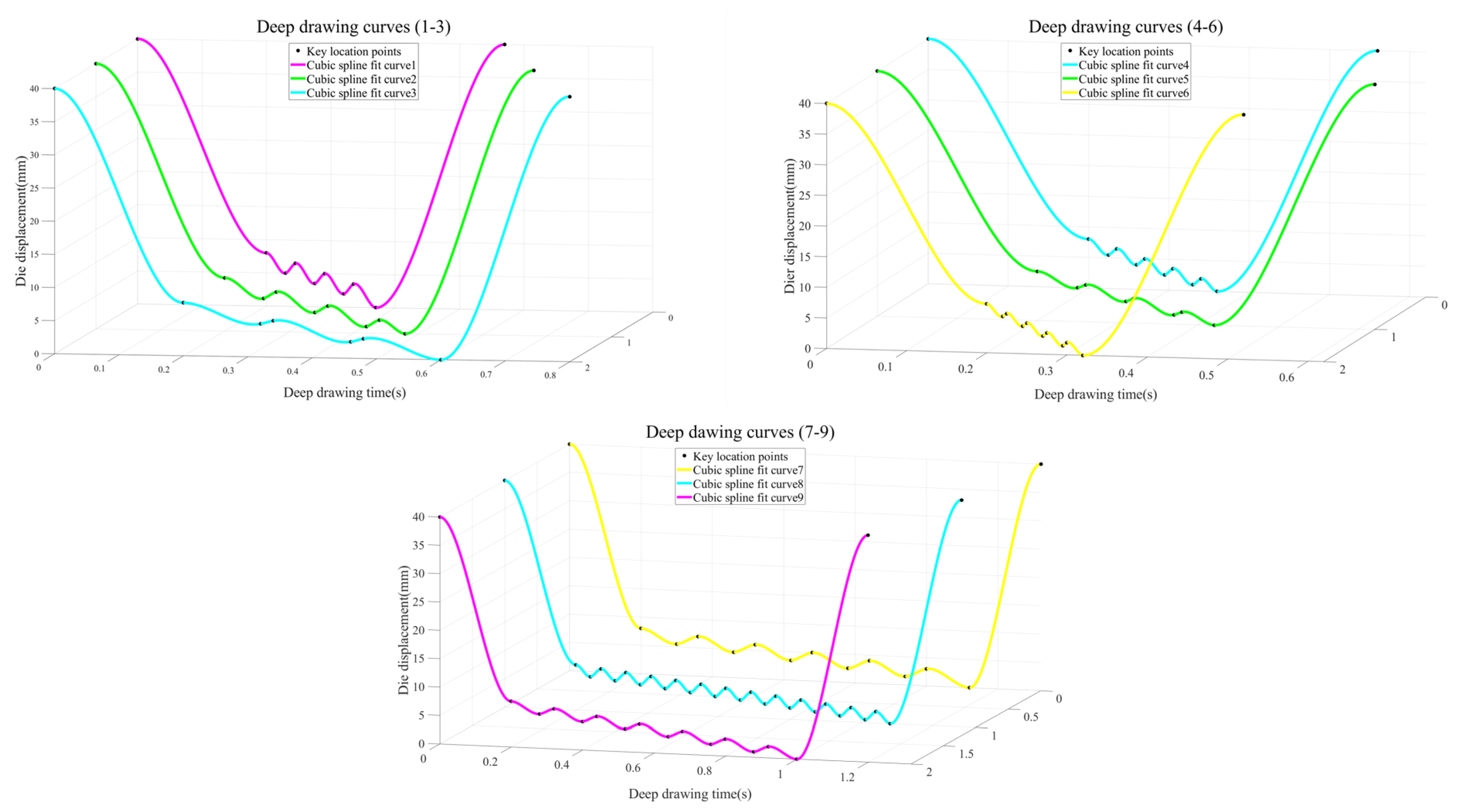
3.3. Servo Deep Drawing Pulse Curve Design
3.4. Wear Model and FEM Analysis
4. Results and Discussion
4.1. Wear Simulation Results
4.2. Analysis of Variance
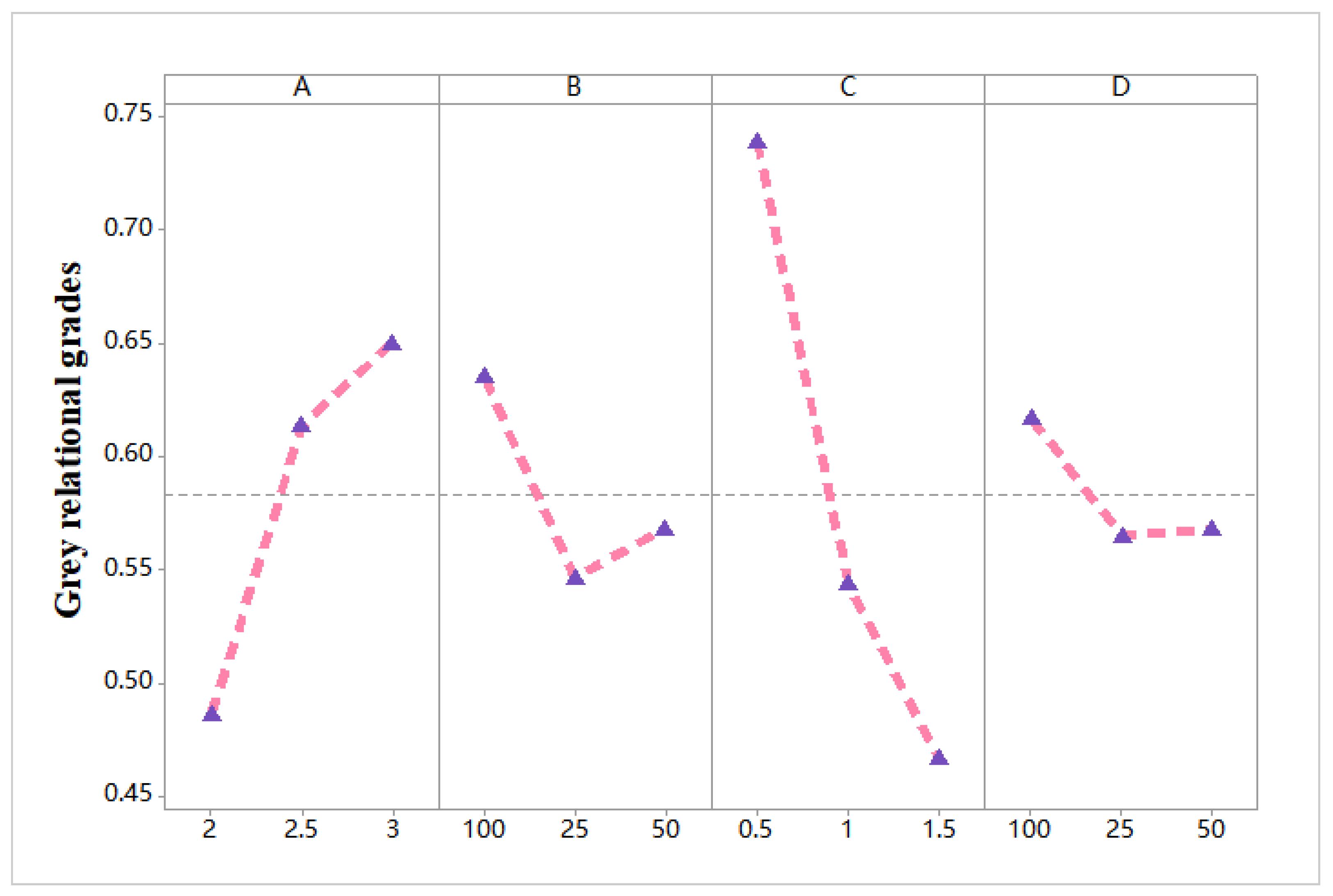
4.3. Comprehensive Optimization Analysis
4.4. Experimental Verification
5. Conclusions
- (1)
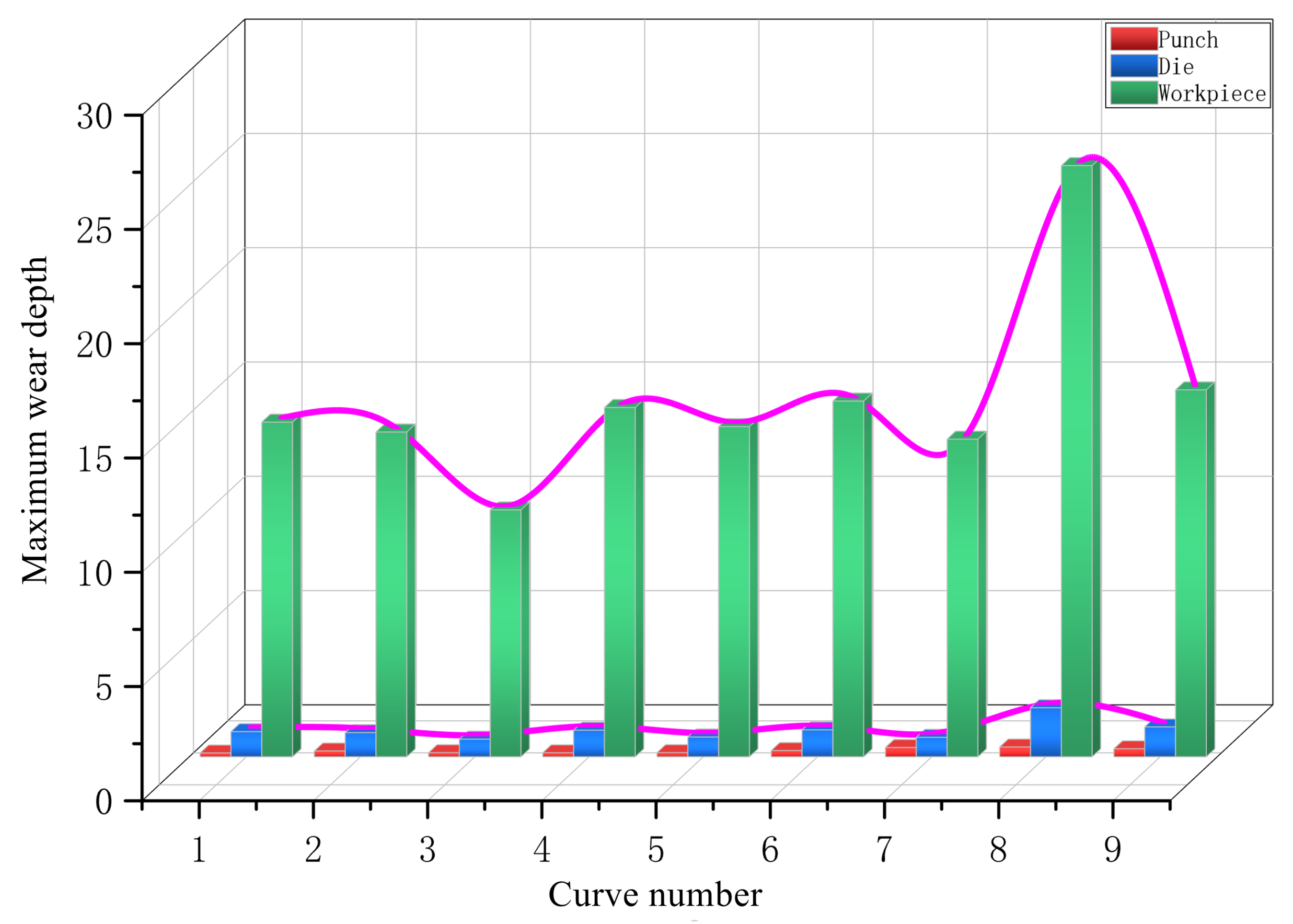
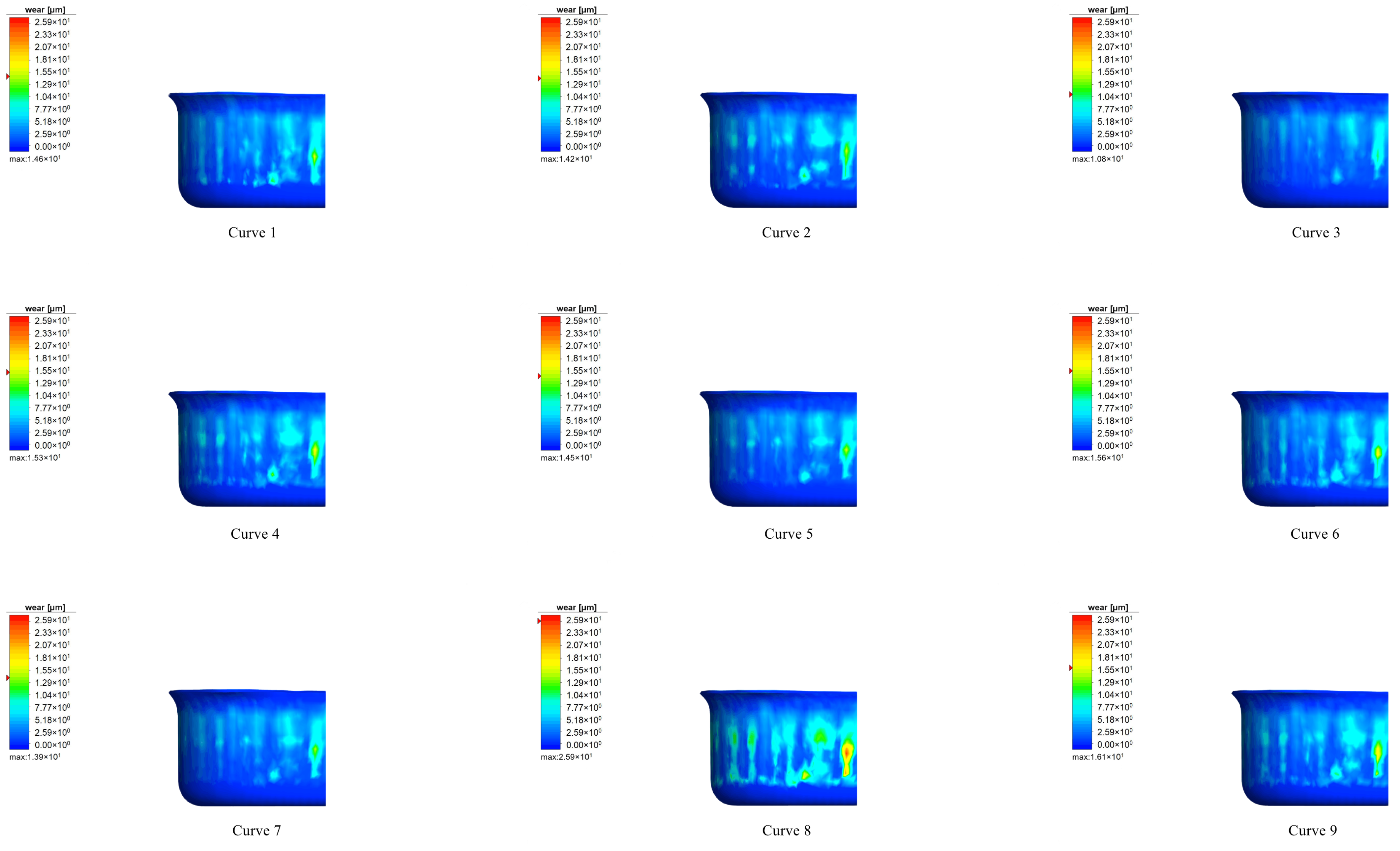
- In the finite element simulation experiment of tantalum deep drawing, the wear degrees of the drawing die and product under the nine considered curve modes differed. Compared with the product surface wear, the maximum wear depth of the die surface was much smaller, while the maximum wear depth of the punch surface can be neglected. Considering the wear morphology of the product surface, the most serious wear area occurred at the straight wall near the bottom of the cup in the rolling direction of the tantalum plate.
- (2)
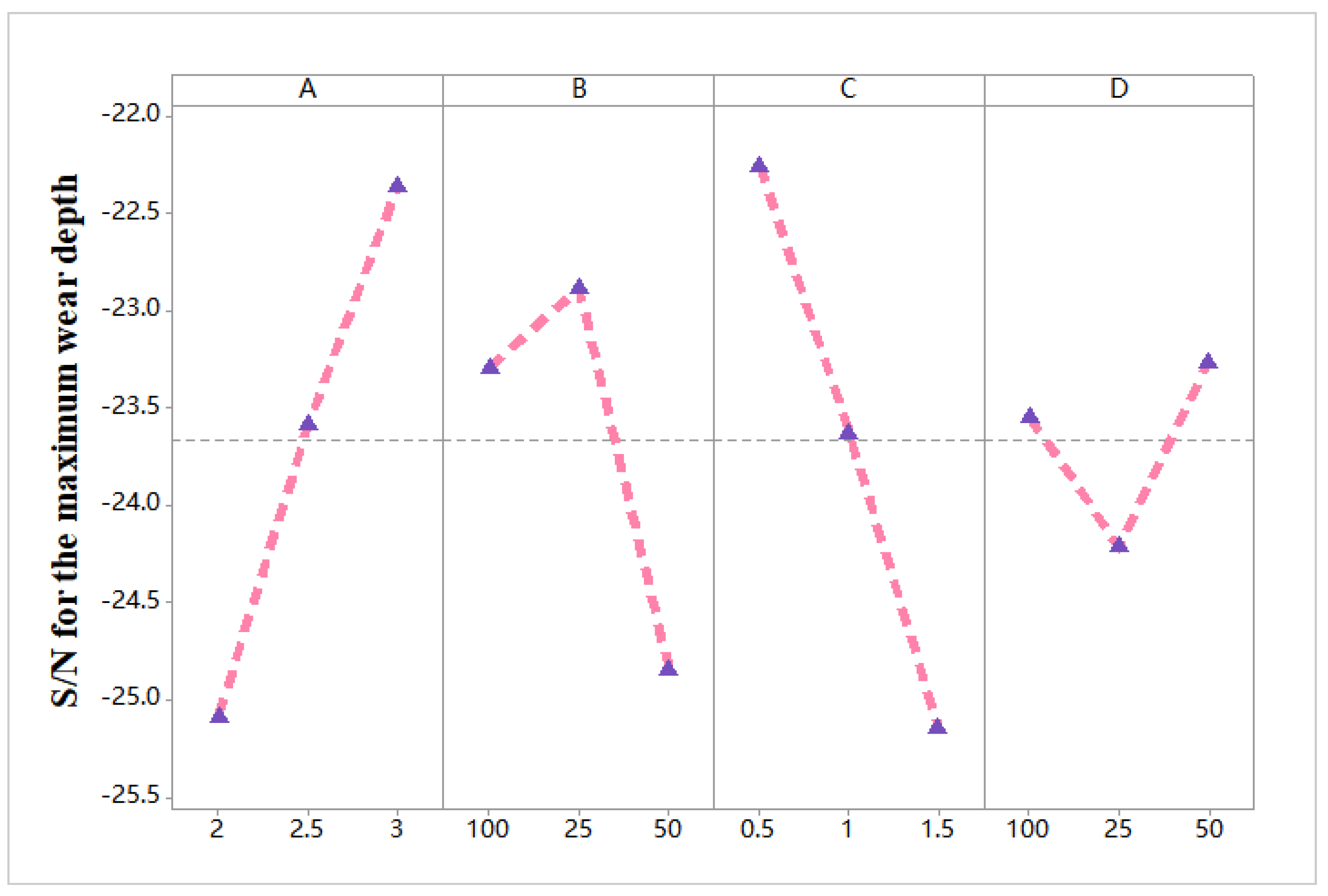
- Based on the Taguchi method, with deep drawing time as the optimization objective, the best parameter combination of pulse drawing stroke curve was ABCD, leading to the shortest deep drawing time in all experimental groups; meanwhile, with wear depth as the optimization objective, the best parameter combination of pulse drawing stroke curve was ABCD. The overall best parameter combination, obtained by Taguchi grey relational analysis, was ABCD, with the grey relational grade reaching 0.89, higher than those of the other nine experiments.
- (3)
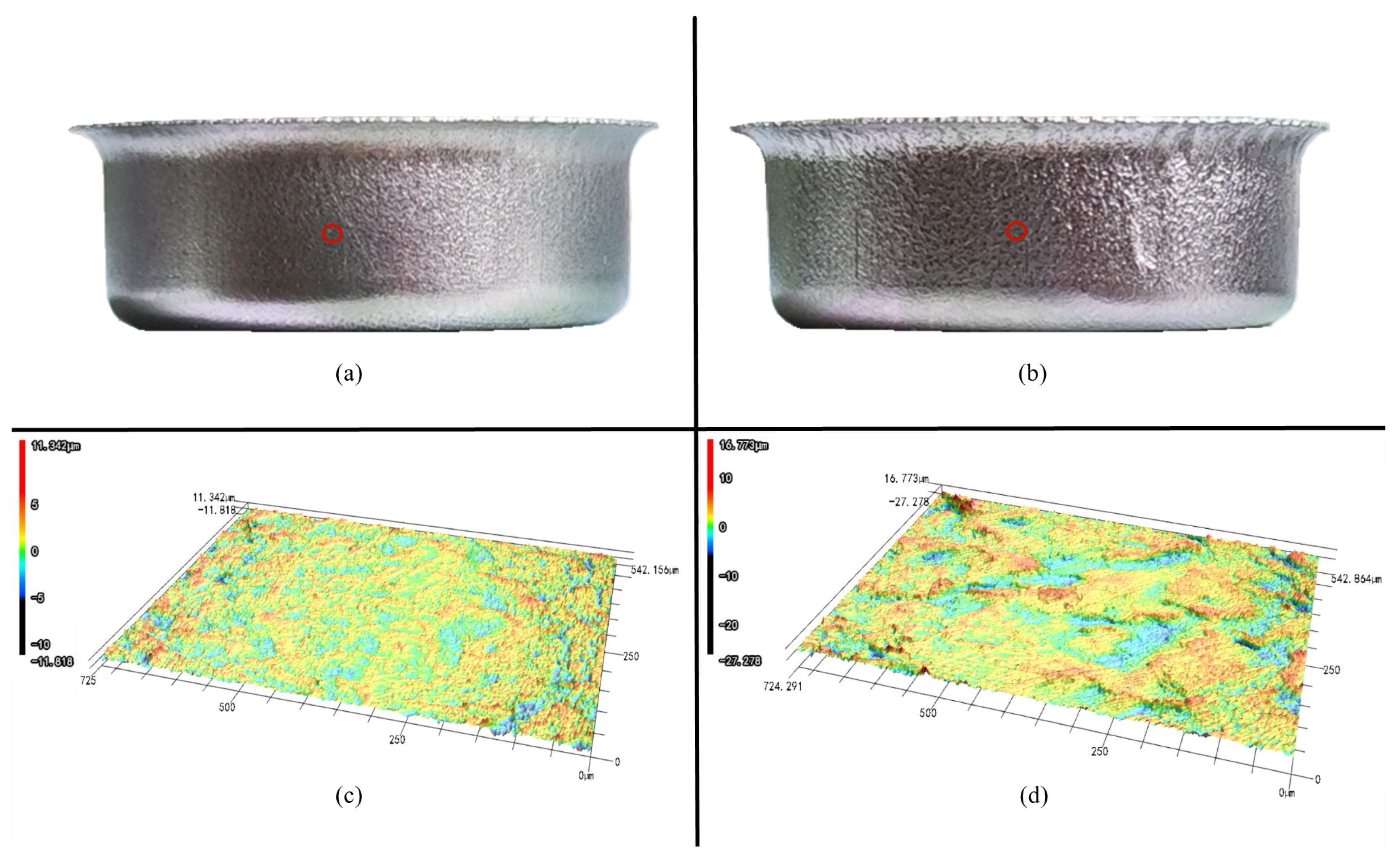
- In the deep drawing verification experiment, the surface quality and the deep drawing time of products formed using the traditional drawing mode and the optimized drawing mode (ABCD) were compared. Considering the macroscopic appearance of the deep drawing products, the surface of the traditional deep drawing product was rough, while that of the optimized deep drawing product was flat and smooth and, thus, the quality of the optimized deep drawing product was obviously better than that of the traditional deep drawing product. Considering the micro-morphology of the severely worn area, the maximum wear depth on the surface of the product formed by optimized deep drawing was 11.818 m, while that formed by traditional deep drawing was 27.278 m. Furthermore, the deep drawing time under the optimized drawing mode was 0.59 s, while that with traditional deep drawing was 0.72 s. In summary, compared with traditional deep drawing, the maximum wear depth of the product under the optimized deep drawing mode was reduced by 56.67% and the deep drawing time was shortened by 18.06%. The surface quality and deep drawing efficiency of the product were improved through the use of the optimized deep drawing mode.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Atul S, T.; Babu, M.L. A review on effect of thinning, wrinkling and spring-back on deep drawing process. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2019, 233, 1011–1036. [Google Scholar] [CrossRef]
- Choubey, A.K.; Agnihotri, G.; Sasikumar, C. Numerical validation of experimental result in deep-drawing. Mater. Today Proc. 2015, 2, 1951–1958. [Google Scholar] [CrossRef]
- Zein, H.; El Sherbiny, M.; Abd-Rabou, M. Thinning and spring back prediction of sheet metal in the deep drawing process. Mater. Des. 2014, 53, 797–808. [Google Scholar] [CrossRef]
- Xu, F.S.; Deng, Y.L.; Zhang, J.; Guo, X.B. Influence of Fillet-Radius and Lubrication on Stamping Quality of Multi-Recessed Aluminum Panels. In Proceedings of the Mechanics and Materials Science: Proceedings of the 2016 International Conference on Mechanics and Materials Science (MMS2016), Guangzhou, China, 15–16 October 2016; pp. 201–213. [Google Scholar]
- Jivan, R.; Eskandarzade, M.; Bewsher, S.; Leighton, M.; Mohammadpour, M.; Saremi-Yarahmadi, S. Application of solid lubricant for enhanced frictional efficiency of deep drawing process. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 624–634. [Google Scholar] [CrossRef]
- Berahmani, S.; Bilgili, C.; Erol, G.; Hol, J.; Carleer, B. The effect of friction and lubrication modelling in stamping simulations of the Ford Transit hood inner panel: A numerical and experimental study. IOP Conf. Ser. Mater. Sci. Eng. 2020, 967, 012010. [Google Scholar] [CrossRef]
- Hashemi, S.J.; Roohi, A.H. Minimizing spring-back and thinning in deep drawing process of St14 steel sheets. Int. J. Interact. Des. Manuf. (IJIDeM) 2022, 16, 381–388. [Google Scholar] [CrossRef]
- Cai, K.; Wang, D. Optimizing the design of automotive S-rail using grey relational analysis coupled with grey entropy measurement to improve crashworthiness. Struct. Multidiscip. Optim. 2017, 56, 1539–1553. [Google Scholar] [CrossRef]
- Flegler, F.; Groche, P.; Abraham, T.; Bräuer, G. Dry Deep Drawing of Aluminum and the Influence of Sheet Metal Roughness. JOM 2020, 72, 2511–2516. [Google Scholar] [CrossRef]
- Buckman, R. New applications for tantalum and tantalum alloys. JOM 2000, 52, 40–41. [Google Scholar] [CrossRef]
- Agrawal, M.; Singh, R.; Ranitović, M.; Kamberovic, Z.; Ekberg, C.; Singh, K.K. Global market trends of tantalum and recycling methods from Waste Tantalum Capacitors: A review. Sustain. Mater. Technol. 2021, 29, e00323. [Google Scholar] [CrossRef]
- Teverovsky, A. Breakdown and self-healing in tantalum capacitors. IEEE Trans. Dielectr. Electr. Insul. 2021, 28, 663–671. [Google Scholar] [CrossRef]
- Freiße, H.; Ditsche, A.; Seefeld, T. Reducing adhesive wear in dry deep drawing of high-alloy steels by using MMC tool. Manuf. Rev. 2019, 6, 12. [Google Scholar] [CrossRef]
- Trzepieciński, T. Polynomial Multiple Regression Analysis of the Lubrication Effectiveness of Deep Drawing Quality Steel Sheets by Eco-Friendly Vegetable Oils. Materials 2022, 15, 1151. [Google Scholar] [CrossRef]
- Marchin, N.; Ashrafizadeh, F. Effect of carbon addition on tribological performance of TiSiN coatings produced by cathodic arc physical vapour deposition. Surf. Coatings Technol. 2021, 407, 126781. [Google Scholar] [CrossRef]
- Halicioglu, R.; Dulger, L.C.; Bozdana, A.T. Mechanisms, classifications, and applications of servo presses: A review with comparisons. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2016, 230, 1177–1194. [Google Scholar] [CrossRef]
- Li, T.C.; Kuo, C.C.; Yang, C.Y.; Liu, K.W.; Li, P.H.; Lin, B.T. Influence of motion curve errors of direct-drive servo press on stamping properties. Int. J. Adv. Manuf. Technol. 2022, 120, 4461–4476. [Google Scholar] [CrossRef]
- Chen, D.C.; Yeh, Y.K. Using finite element analysis to discuss the study of drawing of servo stamping curve. Adv. Mech. Eng. 2021, 13, 16878140211061015. [Google Scholar] [CrossRef]
- Matsumoto, R.; Jeon, J.Y.; Utsunomiya, H. Shape accuracy in the forming of deep holes with retreat and advance pulse ram motion on a servo press. J. Mater. Process. Technol. 2013, 213, 770–778. [Google Scholar] [CrossRef]
- Kuo, C.C.; Huang, H.L.; Li, T.C.; Fang, K.L.; Lin, B.T. Optimization of the pulsating curve for servo stamping of rectangular cup. J. Manuf. Process. 2020, 56, 990–1000. [Google Scholar] [CrossRef]
- Halicioglu, R.; Dulger, L.C.; Bozdana, A.T. Improvement of metal forming quality by motion design. Robot. Comput. -Integr. Manuf. 2018, 51, 112–120. [Google Scholar] [CrossRef]
- Habib, Z.; Sarfraz, M.; Sakai, M. Rational cubic spline interpolation with shape control. Comput. Graph. 2005, 29, 594–605. [Google Scholar] [CrossRef]
- Kirsiaed, E.; Oja, P.; Shah, G.W. Cubic spline histopolation. Math. Model. Anal. 2017, 22, 514–527. [Google Scholar] [CrossRef]
- Zhanlav, T.; Mijiddorj, R. A comparative analysis of local cubic splines. Comput. Appl. Math. 2018, 37, 5576–5586. [Google Scholar] [CrossRef]
- Padmanabhan, R.; Oliveira, M.; Alves, J.; Menezes, L. Influence of process parameters on the deep drawing of stainless steel. Finite Elem. Anal. Des. 2007, 43, 1062–1067. [Google Scholar] [CrossRef]
- Bouchaâla, K.; Ghanameh, M.F.; Faqir, M.; Mada, M.; Essadiqi, E. Prediction of the impact of friction’s coefficient in cylindrical deep drawing for AA2090 Al-Li alloy using FEM and Taguchi approach. IOP Conf. Ser. Mater. Sci. Eng. 2019, 664, 012004. [Google Scholar] [CrossRef]
- Ren, J.; Zhou, J.; Zeng, J. Analysis and optimization of cutter geometric parameters for surface integrity in milling titanium alloy using a modified grey–Taguchi method. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2016, 230, 2114–2128. [Google Scholar] [CrossRef]
- Pillai, J.U.; Sanghrajka, I.; Shunmugavel, M.; Muthuramalingam, T.; Goldberg, M.; Littlefair, G. Optimisation of multiple response characteristics on end milling of aluminium alloy using Taguchi-Grey relational approach. Measurement 2018, 124, 291–298. [Google Scholar] [CrossRef]
- Mahdaviani, S.H.; Parvari, M.; Soudbar, D. Simultaneous multi-objective optimization of a new promoted ethylene dimerization catalyst using grey relational analysis and entropy measurement. Korean J. Chem. Eng. 2016, 33, 423–437. [Google Scholar] [CrossRef]
- Chiang, Y.M.; Hsieh, H.H. The use of the Taguchi method with grey relational analysis to optimize the thin-film sputtering process with multiple quality characteristic in color filter manufacturing. Comput. Ind. Eng. 2009, 56, 648–661. [Google Scholar] [CrossRef]
- Wen, K.L.; Chang, T.C.; You, M.L. The grey entropy and its application in weighting analysis. In Proceedings of the 1998 IEEE International Conference on Systems, Man, and Cybernetics (Cat. No. 98CH36218), San Diego, CA, USA, 14 October 1998; Volume 2, pp. 1842–1844. [Google Scholar]
- Karajibani, E.; Fazli, A.; Hashemi, R. Numerical and experimental study of formability in deep drawing of two-layer metallic sheets. Int. J. Adv. Manuf. Technol. 2015, 80, 113–121. [Google Scholar] [CrossRef]
- Chen, S.R.; Gray, G.T. Constitutive behavior of tantalum and tantalum-tungsten alloys. Metall. Mater. Trans. A 1996, 27, 2994–3006. [Google Scholar] [CrossRef]
- Aghababaei, R.; Zhao, K. Micromechanics of material detachment during adhesive wear: A numerical assessment of Archard’s wear model. Wear 2021, 476, 203739. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Yield strength (MPa) | 276 ± 5 |
| Tensile strength (MPa) | 350 ± 7 |
| Young’s modulus (GPa) | 186 ± 4 |
| Poisson’s ratio | 0.35 ± 0.01 |
| Plastic strain ratio | 0.87 (0°) | Yield stress factor | R | 1.0272 |
| 0.8 (45°) | R | 0.9886 | ||
| 0.6614 (90°) | R | 0.9231 | ||
| Yield strength (MPa) | 273 (0°) | R | 0.9916 | |
| 272 (45°) | R | 1.0 | ||
| 283 (90°) | R | 1.0 |
| A (MPa) | B (MPa) | C | m | n | T (°C) | T (°C) | |
|---|---|---|---|---|---|---|---|
| 241.87 | 447.5 | 0.057 | 0.88 | 0.5 | 25 | 2971 | 0.001 |
| Controlling Factors | Levels | ||
|---|---|---|---|
| 1 | 2 | 3 | |
| Deep drawing depth (A; mm) | 3 | 2.5 | 2 |
| Deep drawing speed (B; mm/s) | 100 | 50 | 25 |
| Return height (C; mm) | 1.5 | 1 | 0.5 |
| Return speed (D; mm/s) | 100 | 50 | 25 |
| Curve No. | A (mm) | B (mm/s) | C (mm) | D (mm/s) |
|---|---|---|---|---|
| 1 | 3 | 100 | 1.5 | 100 |
| 2 | 3 | 50 | 1 | 50 |
| 3 | 3 | 25 | 0.5 | 25 |
| 4 | 2.5 | 100 | 1 | 25 |
| 5 | 2.5 | 50 | 0.5 | 100 |
| 6 | 2.5 | 25 | 1.5 | 50 |
| 7 | 2 | 00 | 0.5 | 50 |
| 8 | 2 | 50 | 1.5 | 25 |
| 9 | 2 | 25 | 1 | 100 |
| Sheet metal diameter (mm) | 32.4 | |
| Sheet thickness (mm) | 0.2 | |
| Model size | Punch diameter (mm) | 20 |
| Die diameter (mm) | 20.42 | |
| Die clearance (mm) | 0.22 | |
| Thermal conductivity of tantalum (W/(m·K)) | 54.4 | |
| Thermal properties | Specific heat capacity of tantalum (J/(g·K)) | 0.153 |
| Plastic deformation dissipation coefficient | 0.9 | |
| Upper spring stiffness (N/m) | 25,000 | |
| Other conditions | Lower spring stiffness (N/m) | 100,000 |
| Simulated experimental temperature (°C) | 25 | |
| Friction coefficient | 0.2 | |
| Wear conditions | Coefficient of wear | 0.001 |
| Die hardness (HRC) | 50 |
| Curve No. | Control Factors | Response of Quality Characteristics | ||||||
|---|---|---|---|---|---|---|---|---|
| A (mm) | B (mm/s) | C (mm) | D (mm/s) | Deep Drawing Time (s) | S/N (dB) | Maximum Wear Depth (μm) | S/N (dB) | |
| 1 | 3 | 100 | 1.5 | 100 | 0.57 | 4.8825 | 14.646 | −23.3144 |
| 2 | 3 | 50 | 1 | 50 | 0.68 | 3.3498 | 14.214 | −23.0543 |
| 3 | 3 | 25 | 0.5 | 25 | 0.80 | 1.9382 | 10.807 | −20.6741 |
| 4 | 2.5 | 100 | 1 | 25 | 0.56 | 5.0362 | 15.287 | −23.6864 |
| 5 | 2.5 | 50 | 0.5 | 100 | 0.42 | 7.5350 | 14.450 | −23.1974 |
| 6 | 2.5 | 25 | 1.5 | 50 | 1.32 | −2.4115 | 15.568 | −23.8447 |
| 7 | 2 | 00 | 0.5 | 50 | 0.52 | 5.6799 | 13.901 | −22.8609 |
| 8 | 2 | 50 | 1.5 | 25 | 1.28 | −2.1442 | 25.869 | −28.2560 |
| 9 | 2 | 25 | 1 | 100 | 1.20 | −1.5836 | 16.059 | −24.1144 |
| Factors | Degrees of Freedom (DF) | Adjusted Sum of Squares (Adj SS) | Adjusted Mean Squares (Adj MS) | Contribution (%) |
|---|---|---|---|---|
| A | 2 | 14.9898 | 7.4949 | 13.5077 |
| B | 2 | 52.8154 | 26.4077 | 47.5934 |
| C | 2 | 36.8320 | 18.4160 | 33.1904 |
| D | 2 | 6.3347 | 3.1674 | 5.7085 |
| Total | 8 | 110.9719 | 55.4860 | 100 |
| Factors | Degrees of Freedom (DF) | Adjusted Sum of Squares (Adj SS) | Adjusted Mean Squares (Adj MS) | Contribution (%) |
|---|---|---|---|---|
| A | 2 | 11.2112 | 5.6056 | 35.4619 |
| B | 2 | 6.3996 | 3.1998 | 20.2424 |
| C | 2 | 12.5742 | 6.2871 | 39.7731 |
| D | 2 | 1.4298 | 0.7149 | 4.5226 |
| Total | 8 | 31.6147 | 15.8074 | 100 |
| Curve No. | Grey Relational Coefficients | Grey Relational Grade | Rank | |
|---|---|---|---|---|
| Deep Drawing Time (s) | Maximum Wear Depth (mm) | |||
| Weight Coefficient: 0.47 | Weight Coefficient: 0.53 | |||
| 1 | 0.6522 | 0.5895 | 0.6221 | 4 |
| 2 | 0.54302 | 0.6143 | 0.5772 | 6 |
| 3 | 0.4705 | 1 | 0.7247 | 2 |
| 4 | 0.6656 | 0.5572 | 0.6135 | 5 |
| 5 | 1 | 0.6004 | 0.8081 | 1 |
| 6 | 0.3333 | 0.5446 | 0.4347 | 8 |
| 7 | 0.7283 | 0.6342 | 0.6831 | 3 |
| 8 | 0.3394 | 0.3333 | 0.3365 | 9 |
| 9 | 0.3529 | 0.5242 | 0.4351 | 7 |
| Factors | Degrees of Freedom (DF) | Adjusted Sum of Squares (Adj SS) | Adjusted Mean Squares (Adj MS) | Contribution (%) |
|---|---|---|---|---|
| A | 2 | 14.9898 | 7.4949 | 13.5077 |
| B | 2 | 52.8154 | 26.4077 | 47.5934 |
| C | 2 | 36.8320 | 18.4160 | 33.1904 |
| D | 2 | 6.3347 | 3.1674 | 5.7085 |
| Total | 8 | 110.9719 | 55.4860 | 100 |
| Deep Drawing Mode | Quality Characteristic | ||
|---|---|---|---|
| Deep Drawing Time (s) | Maximum Wear Depth (μm) | ||
| FEM | Traditional | 0.72 | 24.725 |
| Optimization | 0.59 | 10.982 | |
| EXP | Traditional | 0.72 | 27.278 |
| Optimization | 0.59 | 11.818 | |
| Reduction (%) | 18.06 | 56.67 | |
| Prediction error (%) | 8.22 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Xu, T.; Gong, F.; Ran, J. Influence and Optimization Analysis of Servo Stroke Curve Design on Adhesive Wear in Deep Drawing of Tantalum. Metals 2022, 12, 1340. https://doi.org/10.3390/met12081340
Wang X, Xu T, Gong F, Ran J. Influence and Optimization Analysis of Servo Stroke Curve Design on Adhesive Wear in Deep Drawing of Tantalum. Metals. 2022; 12(8):1340. https://doi.org/10.3390/met12081340
Chicago/Turabian StyleWang, Xin, Teng Xu, Feng Gong, and Jiaqi Ran. 2022. "Influence and Optimization Analysis of Servo Stroke Curve Design on Adhesive Wear in Deep Drawing of Tantalum" Metals 12, no. 8: 1340. https://doi.org/10.3390/met12081340
APA StyleWang, X., Xu, T., Gong, F., & Ran, J. (2022). Influence and Optimization Analysis of Servo Stroke Curve Design on Adhesive Wear in Deep Drawing of Tantalum. Metals, 12(8), 1340. https://doi.org/10.3390/met12081340