

Enhanced YOLOv5 Object Detection Algorithm for Accurate Detection of Adult Rhynchophorus ferrugineus
Abstract
Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. YOLOv5
2.1.1. Input
2.1.2. Backbone
2.1.3. Neck Network
2.1.4. Output
2.2. The Improved Network Model
2.2.1. Introduce the Quadruple Down-Sampling Layer
2.2.2. Introduce the Squeeze-and-Excitation Net
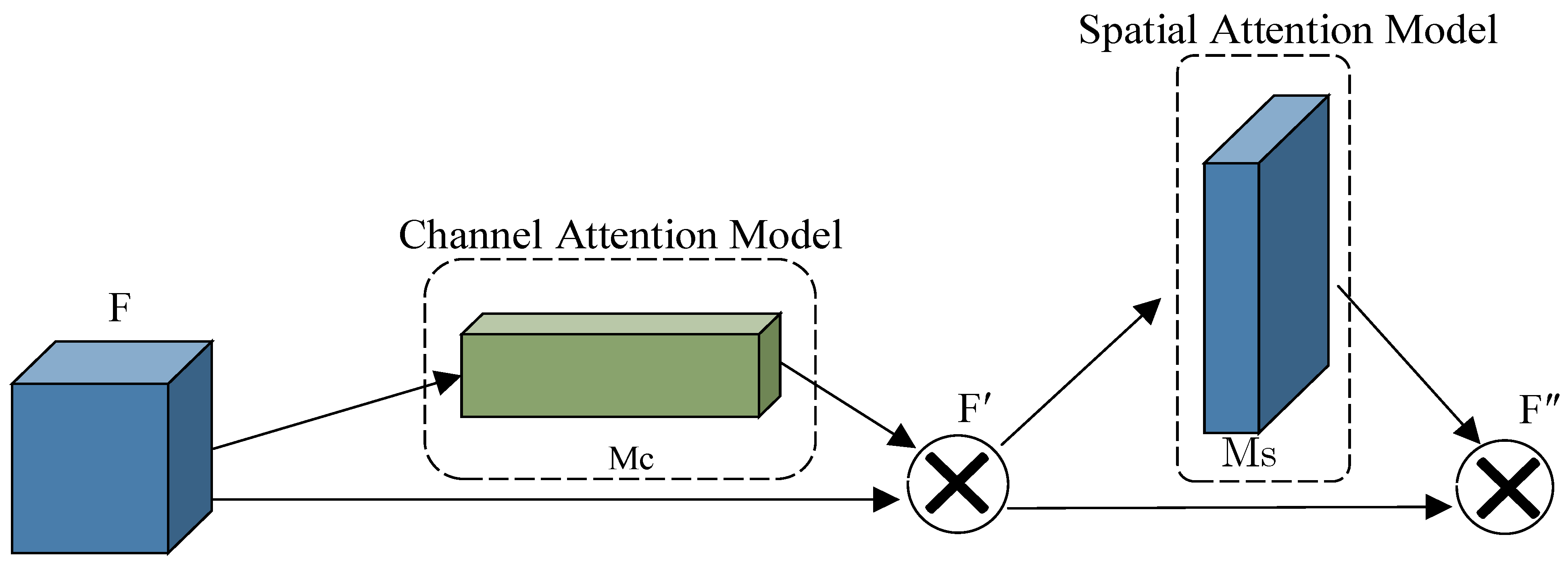
2.2.3. Introduce the Convolutional Attention Module
2.3. An Improved RPW Detection Model Based on YOLOv5
3. Experiment
3.1. Data Acquisition and Enhancement
3.2. Evaluation Indicators
3.3. Experimental Implementations and Settings
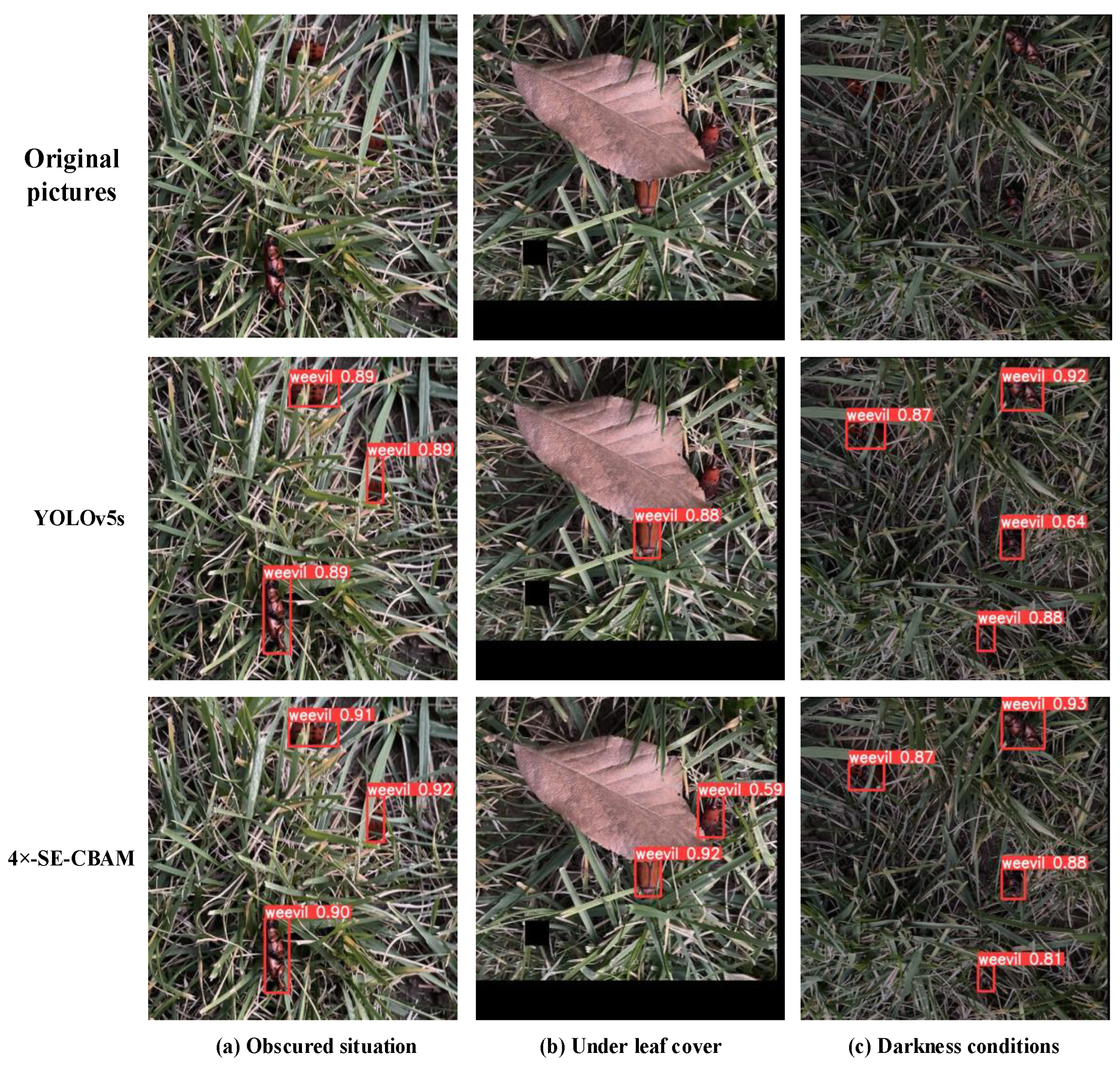
4. Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Giblin-Davis, R.M.; Faleiro, J.R.; Jacas, J.A.; Peña, J.E.; Vidyasagar, P.S.P.V. Biology and management of the red palm weevil, Rhynchophorus ferrugineus. In Potential Invasive Pests of Agricultural Crops; Cabi: Wallingford, UK, 2013; pp. 1–34. [Google Scholar]
- Rochat, D.; Dembilio, O.; Jaques, J.A.; Suma, P.; Pergola, A.L.; Hamidi, R.; Kontodimas, D.; Soroker, V. Rhynchophorus ferrugineus: Taxonomy, distribution, biology, and life cycle. In Handbook of Major Palm Pests: Biology and Management; John Wiley & Sons: Hoboken, NJ, USA, 2017; pp. 69–104. [Google Scholar]
- Faleiro, J.R.; Ferry, M.; Yaseen, T.; Al-Dobai, S. Overview of the gaps, challenges and prospects of red palm weevil management. Arab J. Plant Prot. 2019, 37, 170–177. [Google Scholar] [CrossRef]
- Delalieux, S.; Hardy, T.; Ferry, M.; Gomez, S.; Kooistra, L.; Culman, M.; Tits, L. Red Palm Weevil Detection in Date Palm Using Temporal UAV Imagery. Remote Sens. 2023, 15, 1380. [Google Scholar] [CrossRef]
- Dalbon, V.A.; Acevedo, J.P.M.; Ribeiro Junior, K.A.L.; Ribeiro, T.F.L.; Silva, J.M.D.; Fonseca, H.G.; Santana, A.E.G.; Porcelli, F. Perspectives for synergic blends of attractive sources in south american palm weevil mass trapping: Waiting for the red palm weevil Brazil invasion. Insects 2021, 12, 828. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez, F.; Kharrat, S.; Rodríguez, C.; Calvo, C.; Oehlschlager, A. Research paper (integrated management: Insects) red palm weevil (Rhynchophorus ferrugineus Olivier): Recent advances. Arab J. Plant Prot. 2019, 37, 178–187. [Google Scholar]
- Soomro, M.H.; Mari, J.M.; Nizamani, I.A.; Gilal, A.A. Performance of Ferrolure+ pheromone in the red palm weevil, Rhynchophorus ferrugineus (Coleoptera: Dryophthoridae) management in date palm growing areas of Sindh, Pakistan. J. Saudi Soc. Agric. Sci. 2022, 21, 114–124. [Google Scholar] [CrossRef]
- Martin, A.; Sathish, D.; Balachander, C.; Hariprasath, T.; Krishnamoorthi, G. Identification and counting of pests using extended region grow algorithm. In Proceedings of the 2015 2nd International Conference on Electronics and Communication Systems (ICECS), Coimbatore, India, 26–27 February 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1229–1234. [Google Scholar]
- Lima, M.C.F.; de Almeida Leandro, M.E.D.; Valero, C.; Coronel, L.C.P.; Bazzo, C.O.G. Automatic detection and monitoring of insect pests—A review. Agriculture 2020, 10, 161. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. Adv. Neural Inf. Process. Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R. You only look once: Unifified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 12 December 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Hawaii, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Ting, L.; Baijun, Z.; Yongsheng, Z.; Shun, Y. Ship detection algorithm based on improved YOLO V5. In Proceedings of the 2021 6th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 15–17 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 483–487. [Google Scholar]
- Chen, Z.; Wu, R.; Lin, Y.; Li, C.; Chen, S.; Yuan, Z.; Chen, S.; Zou, X. Plant disease recognition model based on improved YOLOv5. Agronomy 2022, 12, 365. [Google Scholar] [CrossRef]
- Ahmad, I.; Yang, Y.; Yue, Y.; Ye, C.; Hassan, M.; Cheng, X.; Wu, Y.; Zhang, Y. Deep learning based detector yolov5 for identifying insect pests. Appl. Sci. 2022, 12, 10167. [Google Scholar] [CrossRef]
- Jhatial, M.J.; Shaikh, R.A.; Shaikh, N.A.; Rajper, S.; Arain, R.H.; Chandio, G.H.; Bhangwar, A.Q.; Shaikh, H.; Shaikh, K.H. Deep Learning-Based Rice Leaf Diseases Detection Using Yolov5. Sukkur IBA J. Comput. Math. Sci. 2022, 6, 49–61. [Google Scholar]
- Dai, M.; Dorjoy, M.M.H.; Miao, H.; Zhang, S. A New Pest Detection Method Based on Improved YOLOv5m. Insects 2023, 14, 54. [Google Scholar] [CrossRef] [PubMed]
- Li, R.; Wu, Y. Improved YOLO v5 Wheat Ear Detection Algorithm Based on Attention Mechanism. Electronics 2022, 11, 1673. [Google Scholar] [CrossRef]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the 2018 IEEE CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.; Kweon, I.S. CBAM: Convolutional block attention module. In Proceedings of the 2018 European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; p. 11211. [Google Scholar]
- Zhu, L.; Geng, X.; Li, Z.; Liu, C. Improving YOLOv5 with attention mechanism for detecting boulders from planetary images. Remote Sens. 2021, 13, 3776. [Google Scholar] [CrossRef]
- Yang, L.; Yan, J.; Li, H.; Cao, X.; Ge, B.; Qi, Z.; Yan, X. Real-Time Classification of Invasive Plant Seeds Based on Improved YOLOv5 with Attention Mechanism. Diversity 2022, 14, 254. [Google Scholar] [CrossRef]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. In Proceedings of the 2020 IEEE CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11531–11539. [Google Scholar]
- Qi, J.; Liu, X.; Liu, K.; Xu, F.; Guo, H.; Tian, X.; Li, M.; Bao, Z.; Li, Y. An improved YOLOv5 model based on visual attention mechanism: Application to recognition of tomato virus disease. Comput. Electron. Agric. 2022, 194, 106780. [Google Scholar] [CrossRef]
- Yuan, Z.; Fang, W.; Zhao, Y.; Sheng, V.S. Research of Insect Recognition Based on Improved YOLOv5. J. Artif. Intell. 2021, 3, 145–152. [Google Scholar] [CrossRef]
- Ieamsaard, J.; Charoensook, S.N.; Yammen, S. Deep learning-based face mask detection using yolov5. In Proceedings of the 2021 9th International Electrical Engineering Congress (iEECON), Pattaya, Thailand, 10–12 March 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 428–431. [Google Scholar]
- Li, B.; Hou, Y.; Che, W. Data Augmentation Approaches in Natural Language Processing: A Survey. AI Open 2022, 3, 71–90. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Precision | Recall | mAP@0.5 | mAP@0.5:0.95 |
|---|---|---|---|---|
| YOLOv5s | 0.913 | 0.828 | 0.888 | 0.485 |
| YOLOv5s-4x | 0.923 | 0.813 | 0.893 | 0.486 |
| YOLOv5s-4x-SE | 0.928 | 0.811 | 0.878 | 0.454 |
| YOLOv5s-4x-CBAM | 0.932 | 0.795 | 0.849 | 0.437 |
| YOLOv5s-4x-SE-CBAM | 0.938 | 0.834 | 0.901 | 0.489 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, S.; Wang, J.; Liu, L.; Chen, D.; Lu, H.; Xu, C.; Hao, R.; Li, Z.; Wang, Q. Enhanced YOLOv5 Object Detection Algorithm for Accurate Detection of Adult Rhynchophorus ferrugineus. Insects 2023, 14, 698. https://doi.org/10.3390/insects14080698
Wu S, Wang J, Liu L, Chen D, Lu H, Xu C, Hao R, Li Z, Wang Q. Enhanced YOLOv5 Object Detection Algorithm for Accurate Detection of Adult Rhynchophorus ferrugineus. Insects. 2023; 14(8):698. https://doi.org/10.3390/insects14080698
Chicago/Turabian StyleWu, Shuai, Jianping Wang, Li Liu, Danyang Chen, Huimin Lu, Chao Xu, Rui Hao, Zhao Li, and Qingxuan Wang. 2023. "Enhanced YOLOv5 Object Detection Algorithm for Accurate Detection of Adult Rhynchophorus ferrugineus" Insects 14, no. 8: 698. https://doi.org/10.3390/insects14080698
APA StyleWu, S., Wang, J., Liu, L., Chen, D., Lu, H., Xu, C., Hao, R., Li, Z., & Wang, Q. (2023). Enhanced YOLOv5 Object Detection Algorithm for Accurate Detection of Adult Rhynchophorus ferrugineus. Insects, 14(8), 698. https://doi.org/10.3390/insects14080698