Characterization and Simulation of a Bush Plane Tire



Abstract
:
1. Introduction
2. Experimental Tests
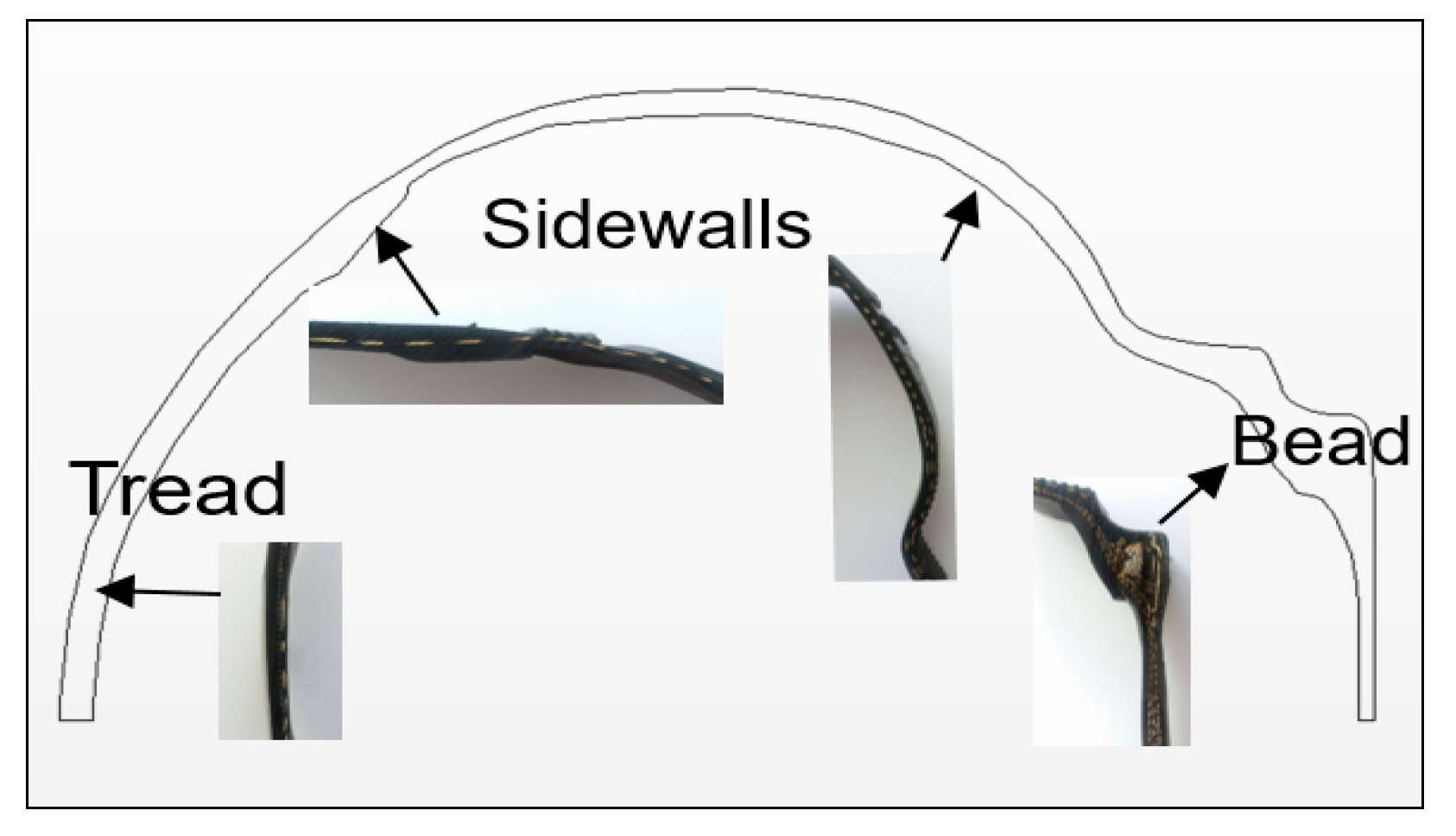
2.1. Cross Section
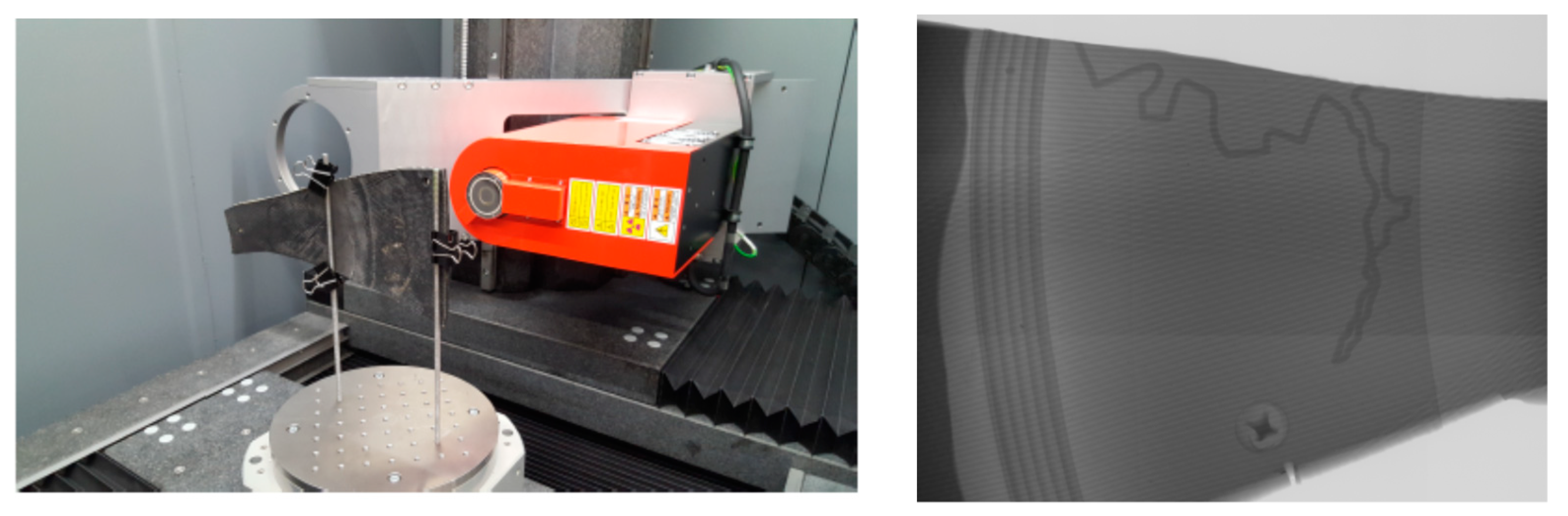
2.2. Inner Structure
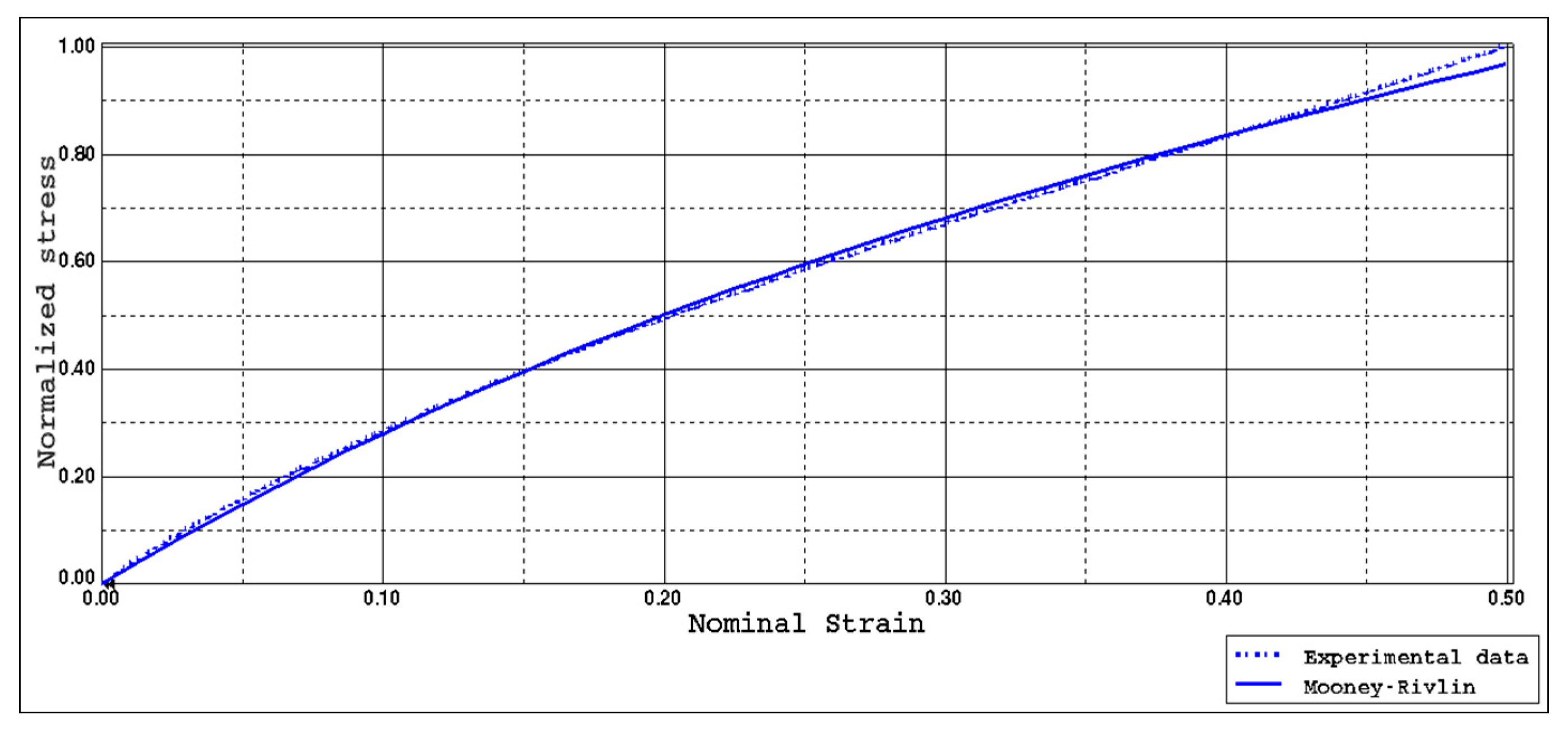
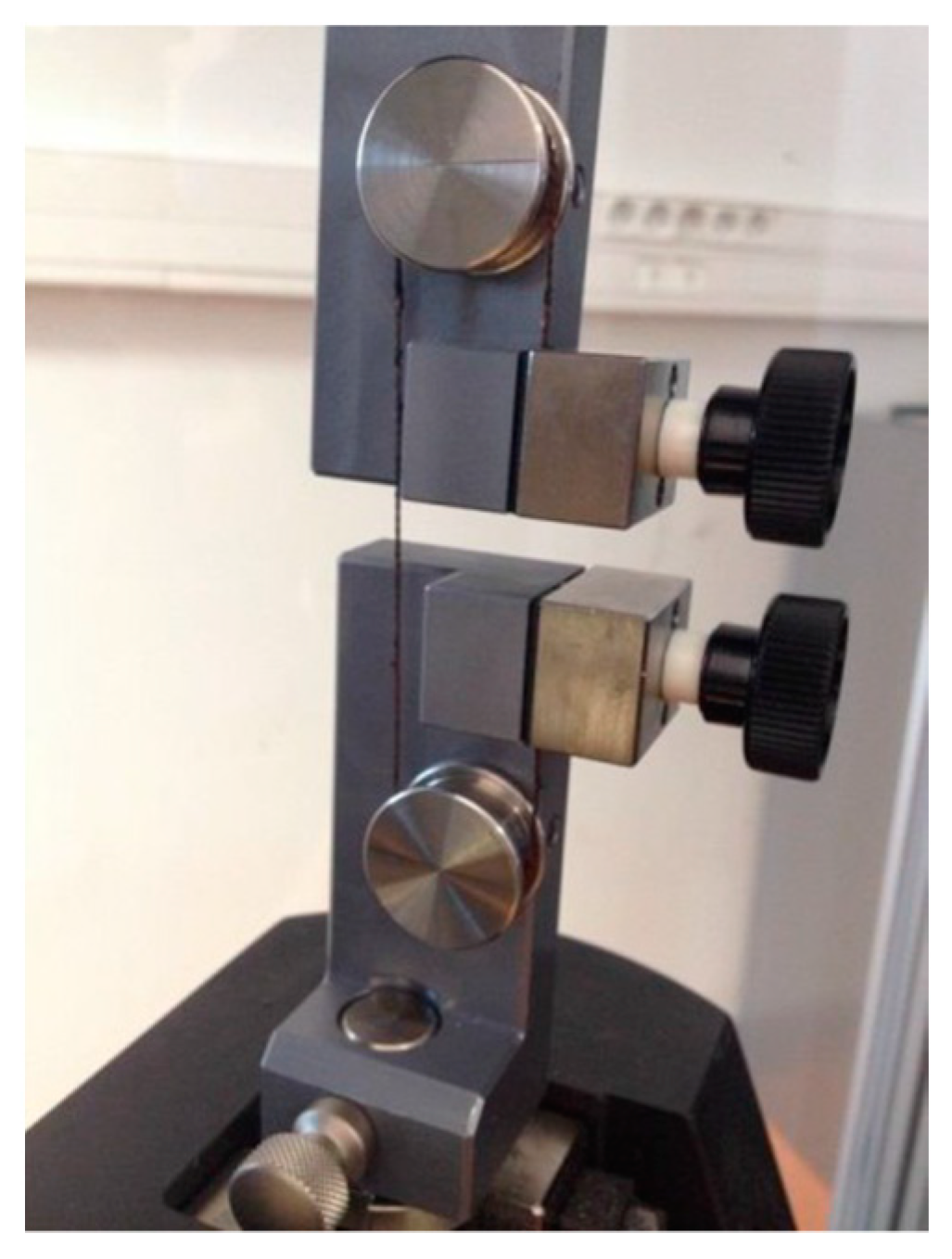
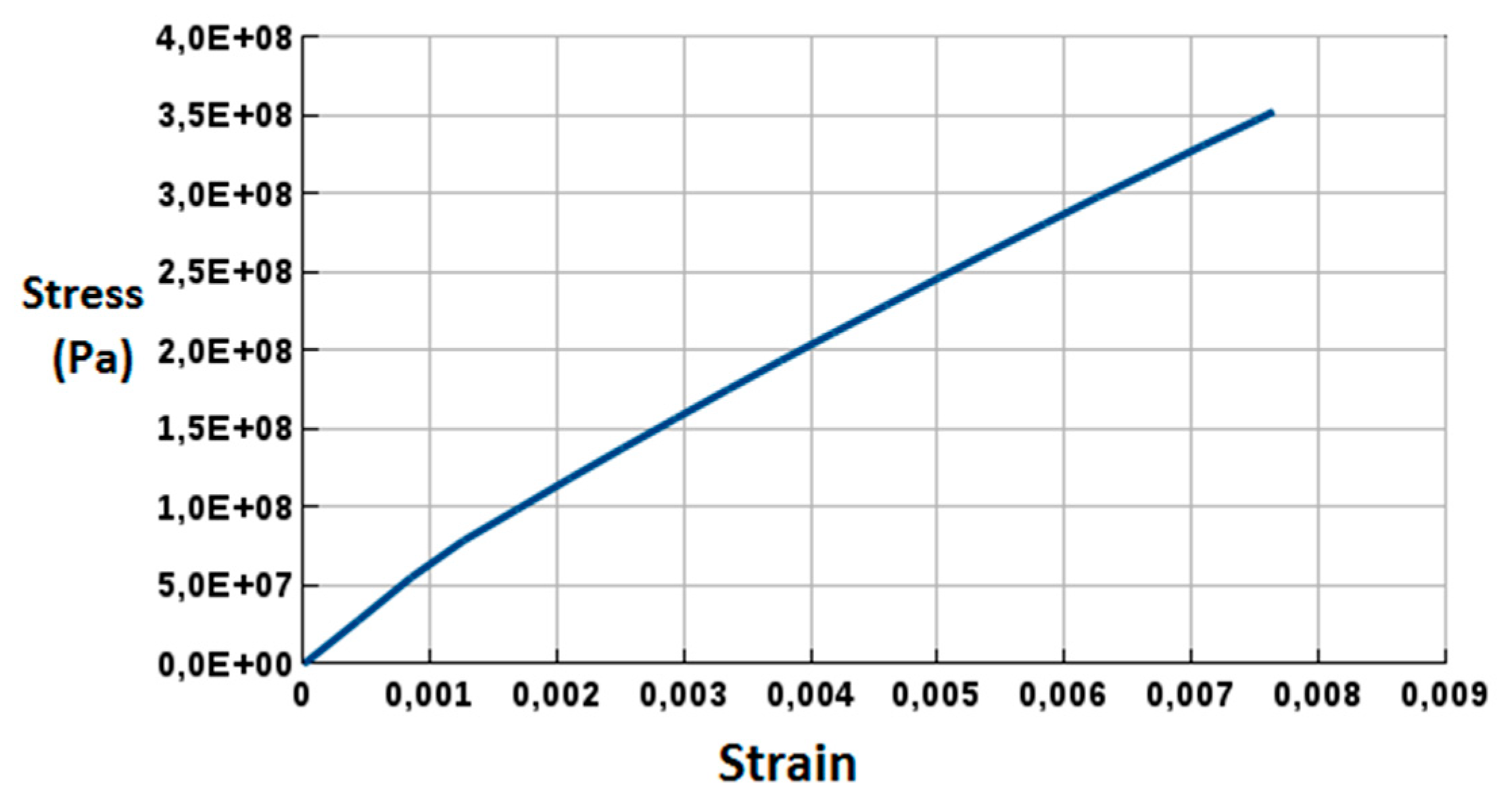
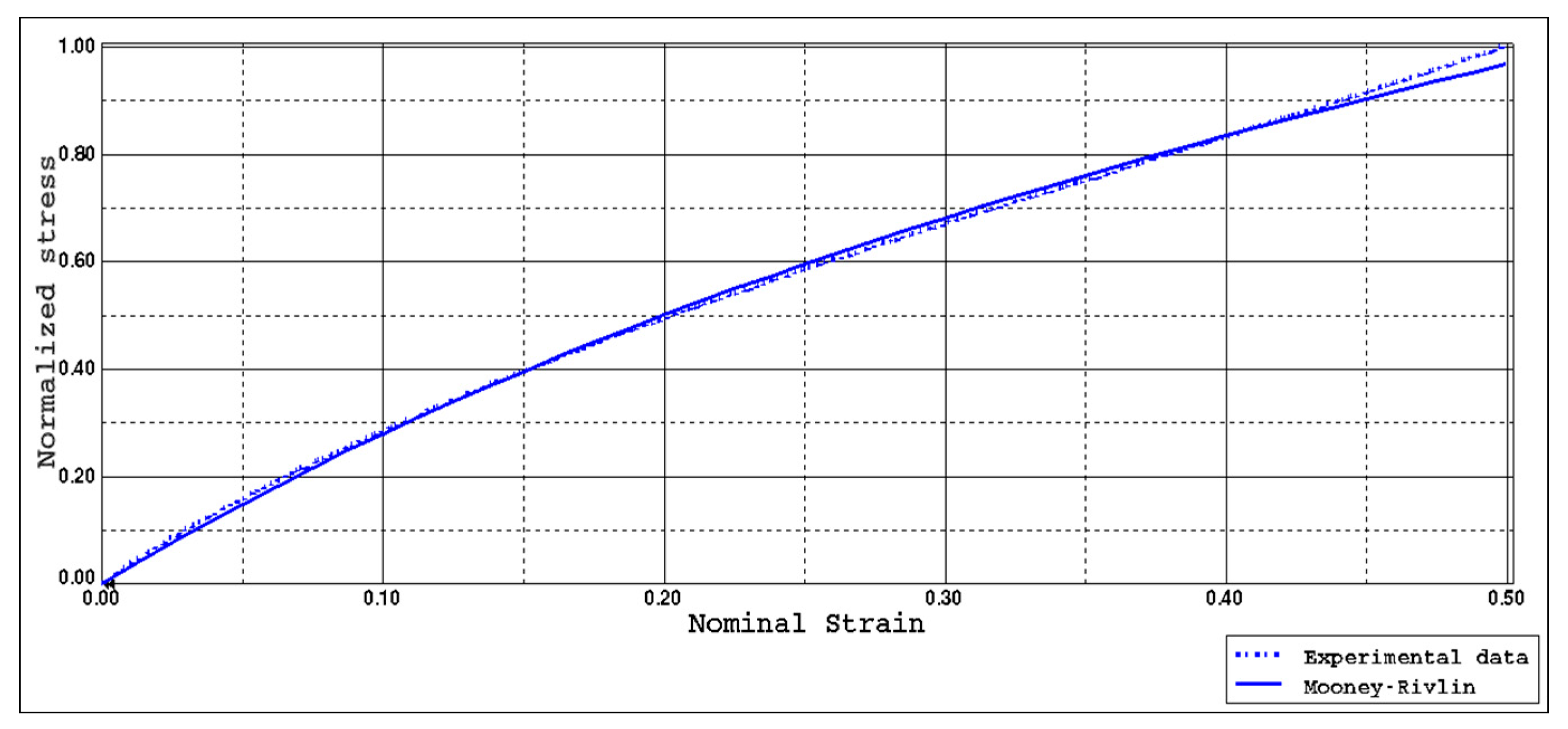
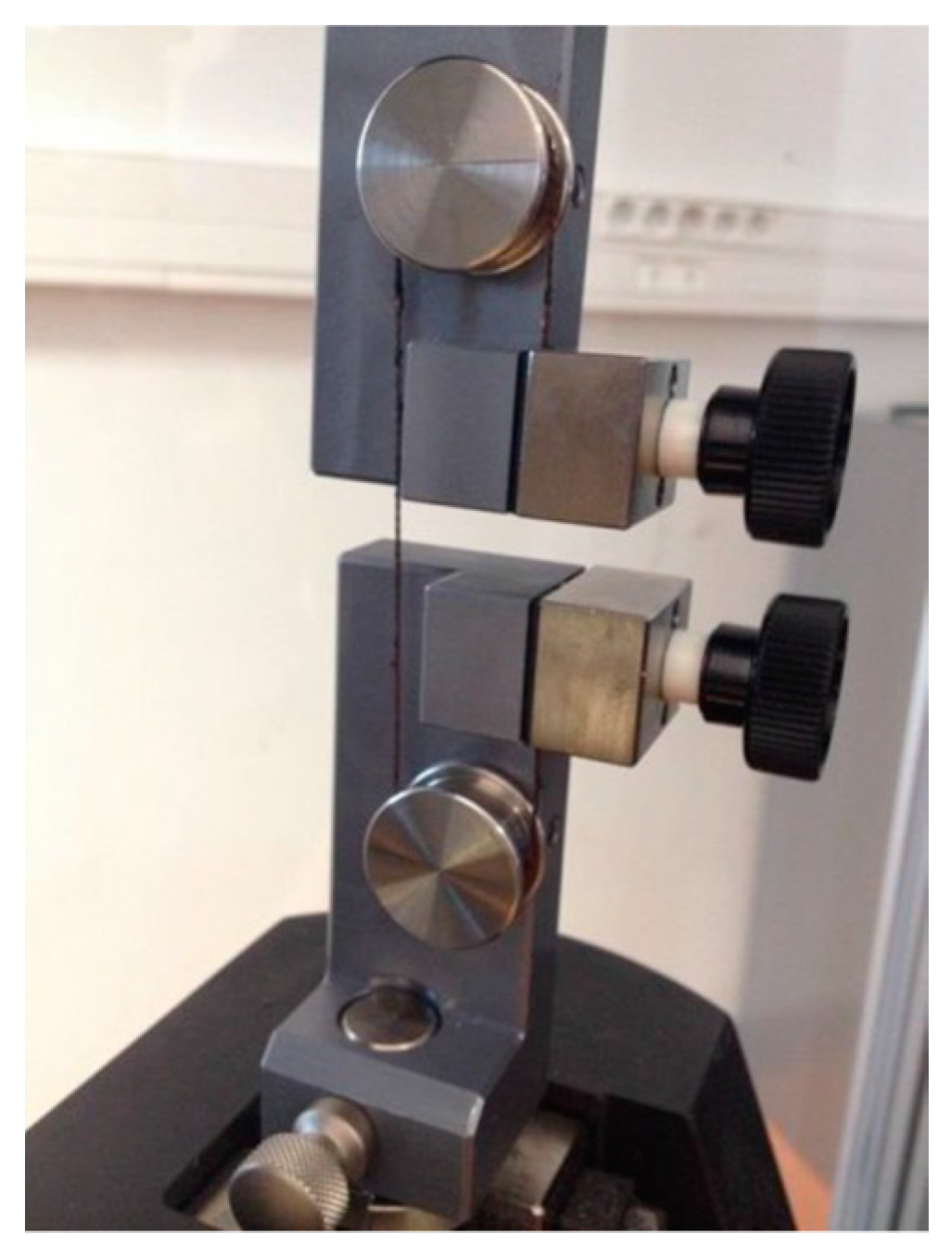
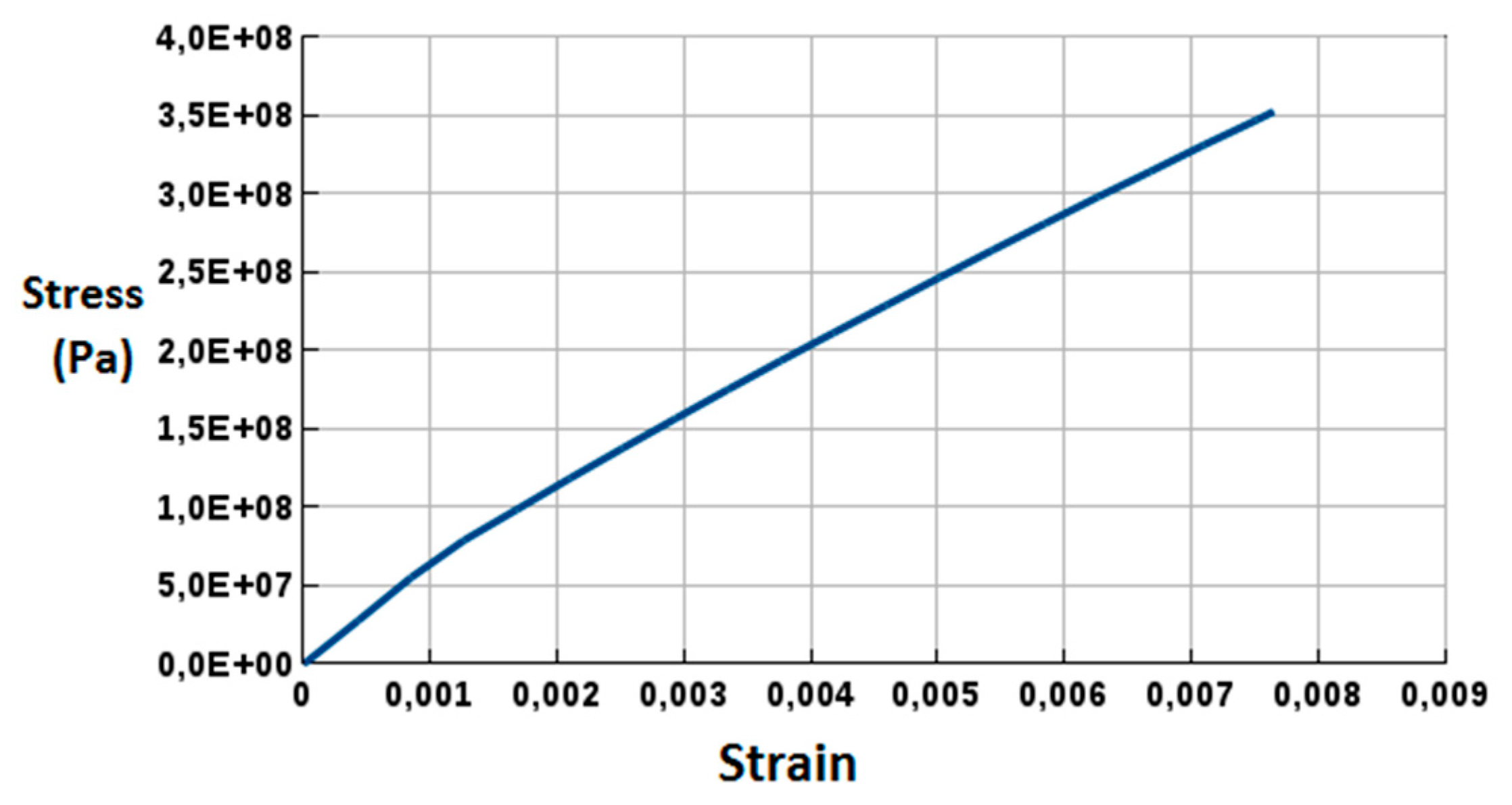
2.3. Materials
3. Numerical Simulations
3.1. 2D Mesh
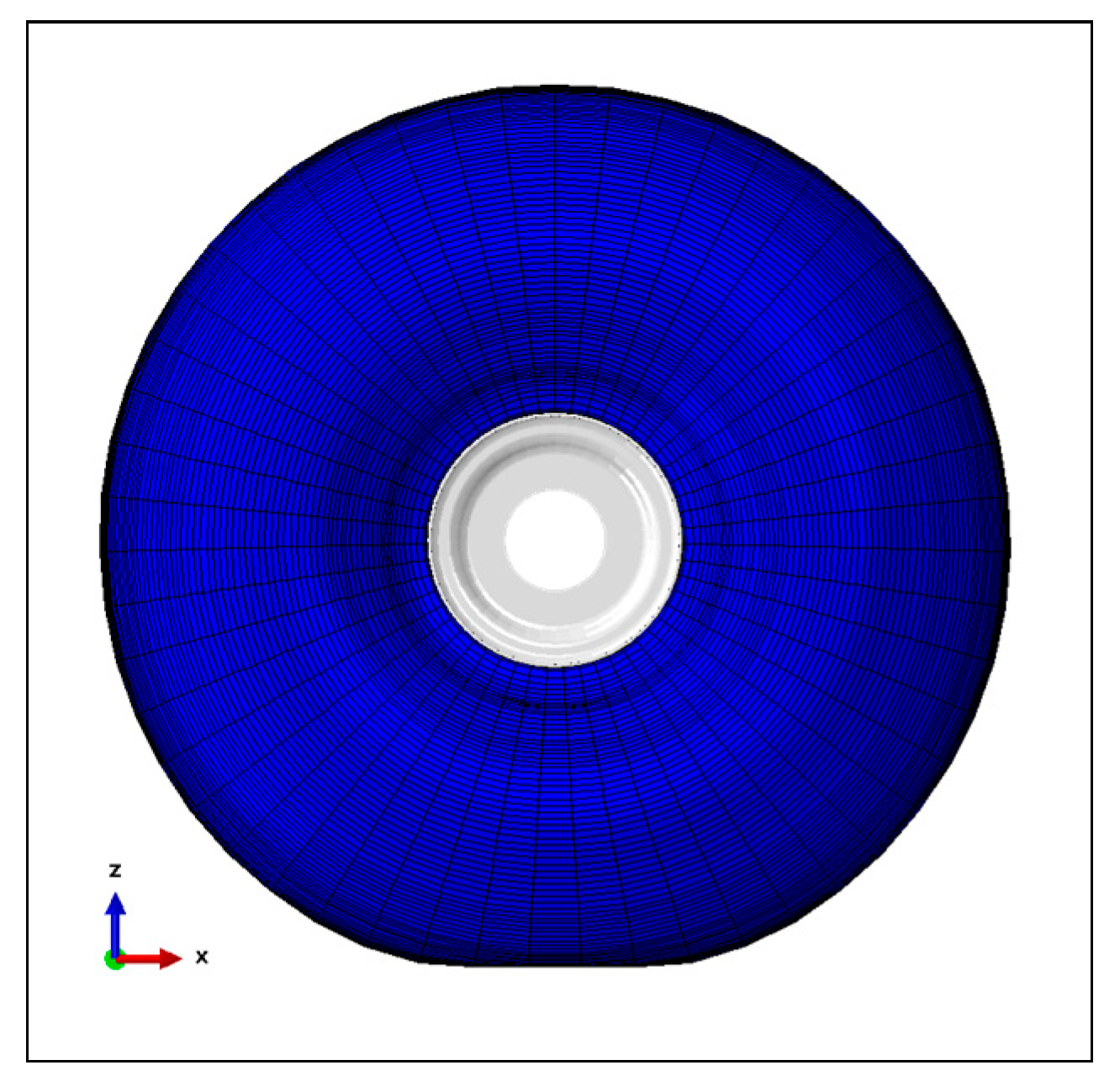
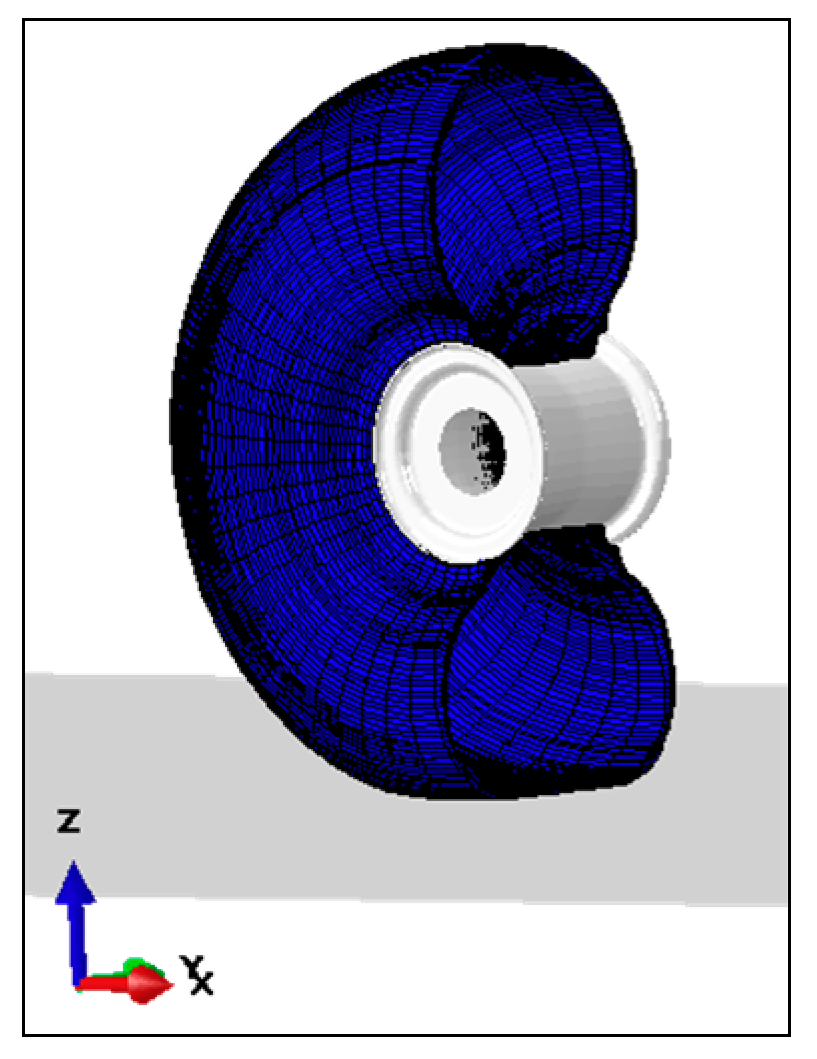
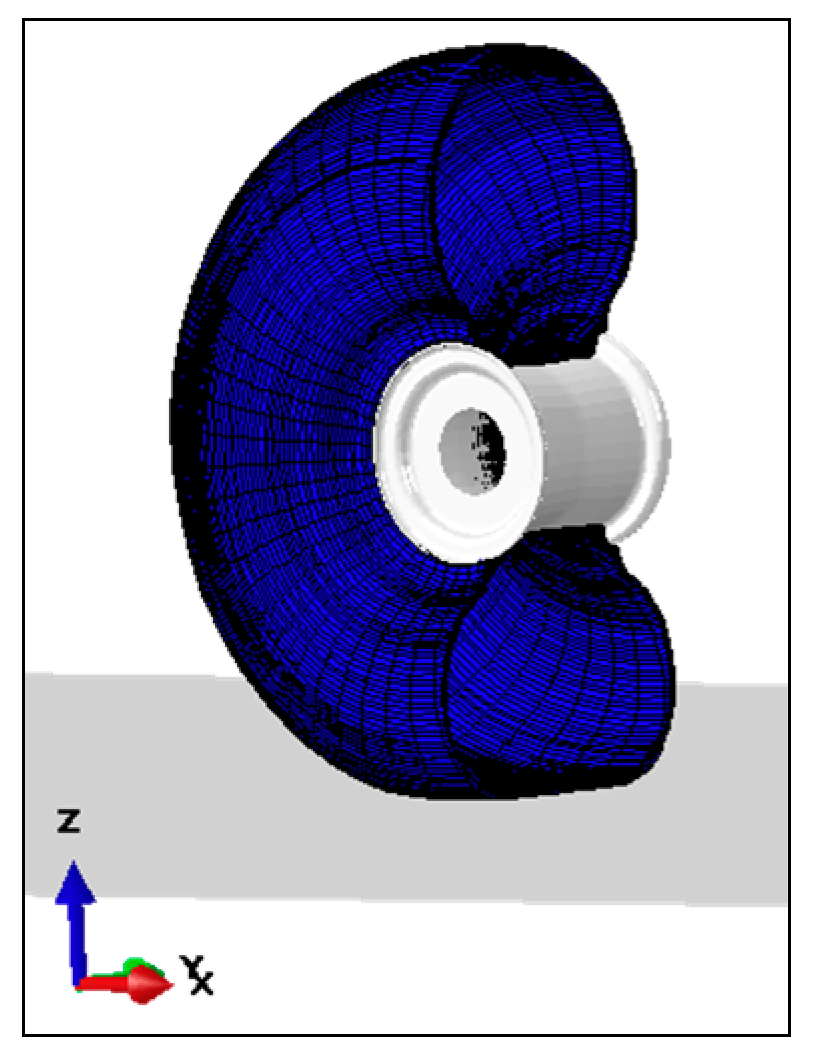
3.2. 3D Mesh
3.3. Simulation Hypothesis
- -
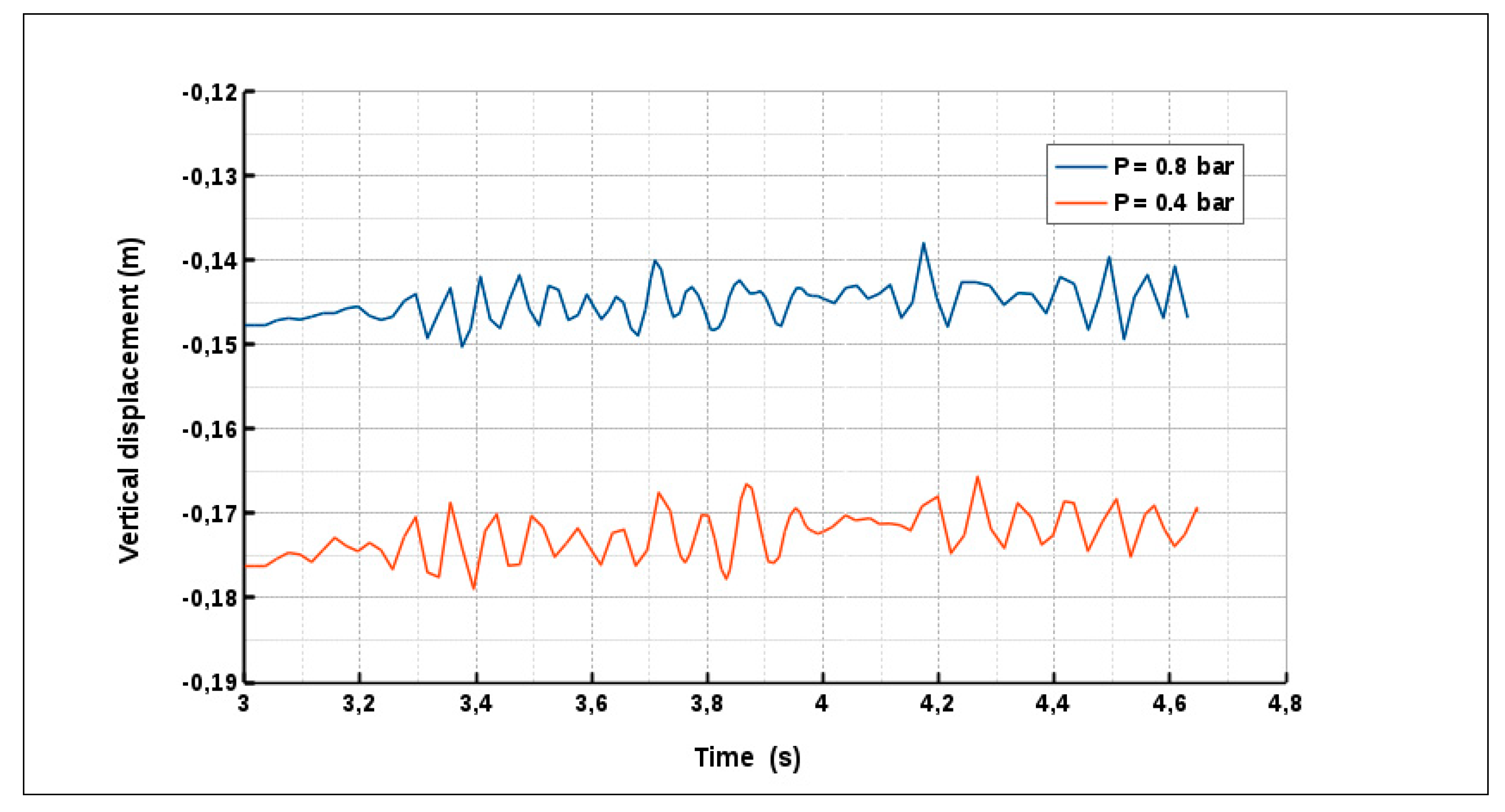
- the tire is subjected to a constant inflation pressure according to some specifications (between 0.4 bar and 1.2 bar).
- -
- a vertical load corresponding to half of the weight of the structure is applied on the rim.
- -
- the longitudinal displacement/velocity of the tire is applied directly on the rim centre.
- -
- the runway, considered as a rigid body, is fixed during the simulation.
- -
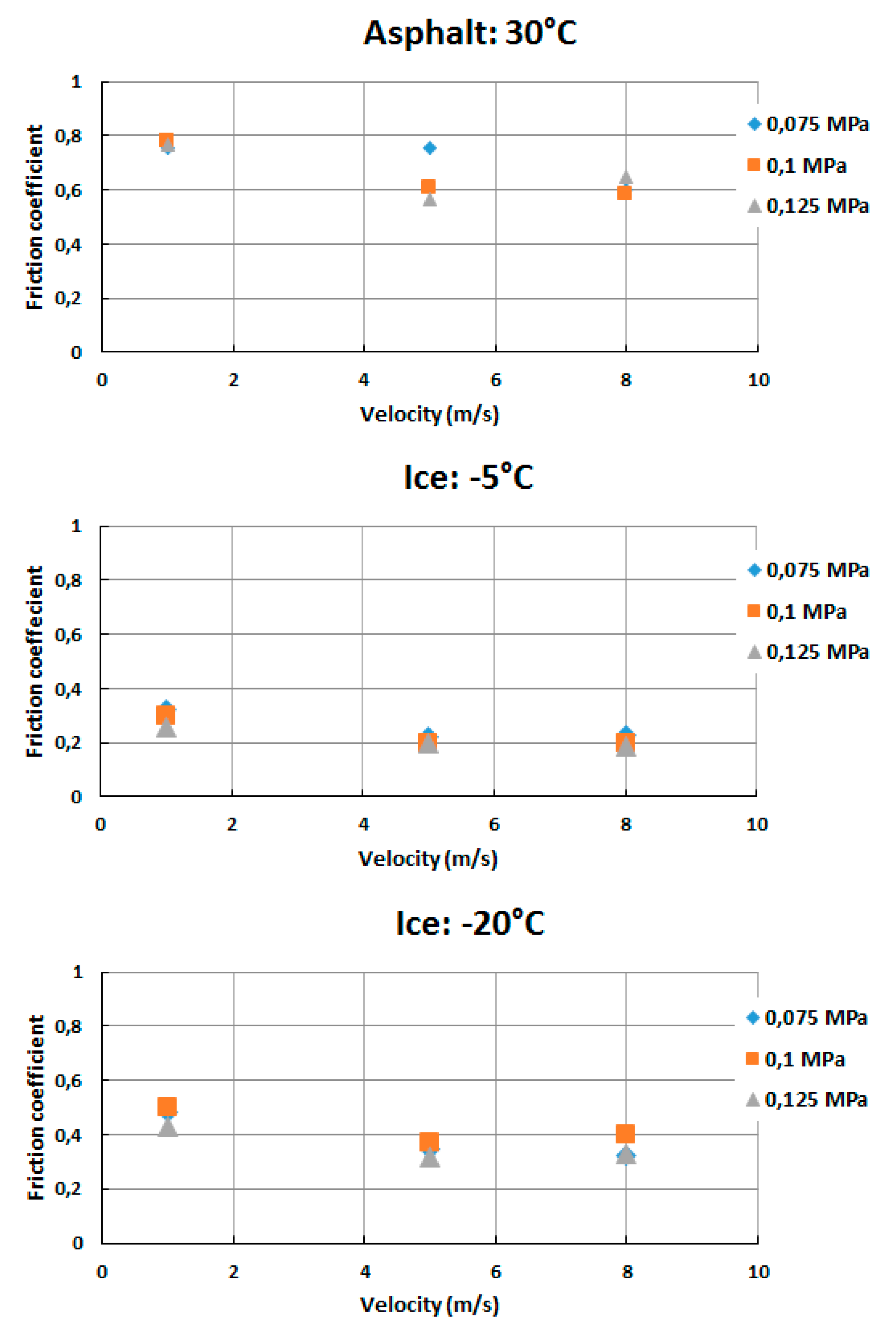
- the frictional contact problem in the FEM model is described between a deformable body (tire) and a rigid body (ground). The contact is modelled using non smooth Coulomb and Signorini laws. The friction coefficient is assumed to be constant during one rolling, but different coefficients measured on different surfaces by mean of a tribometer were used.
3.4. Model Validation
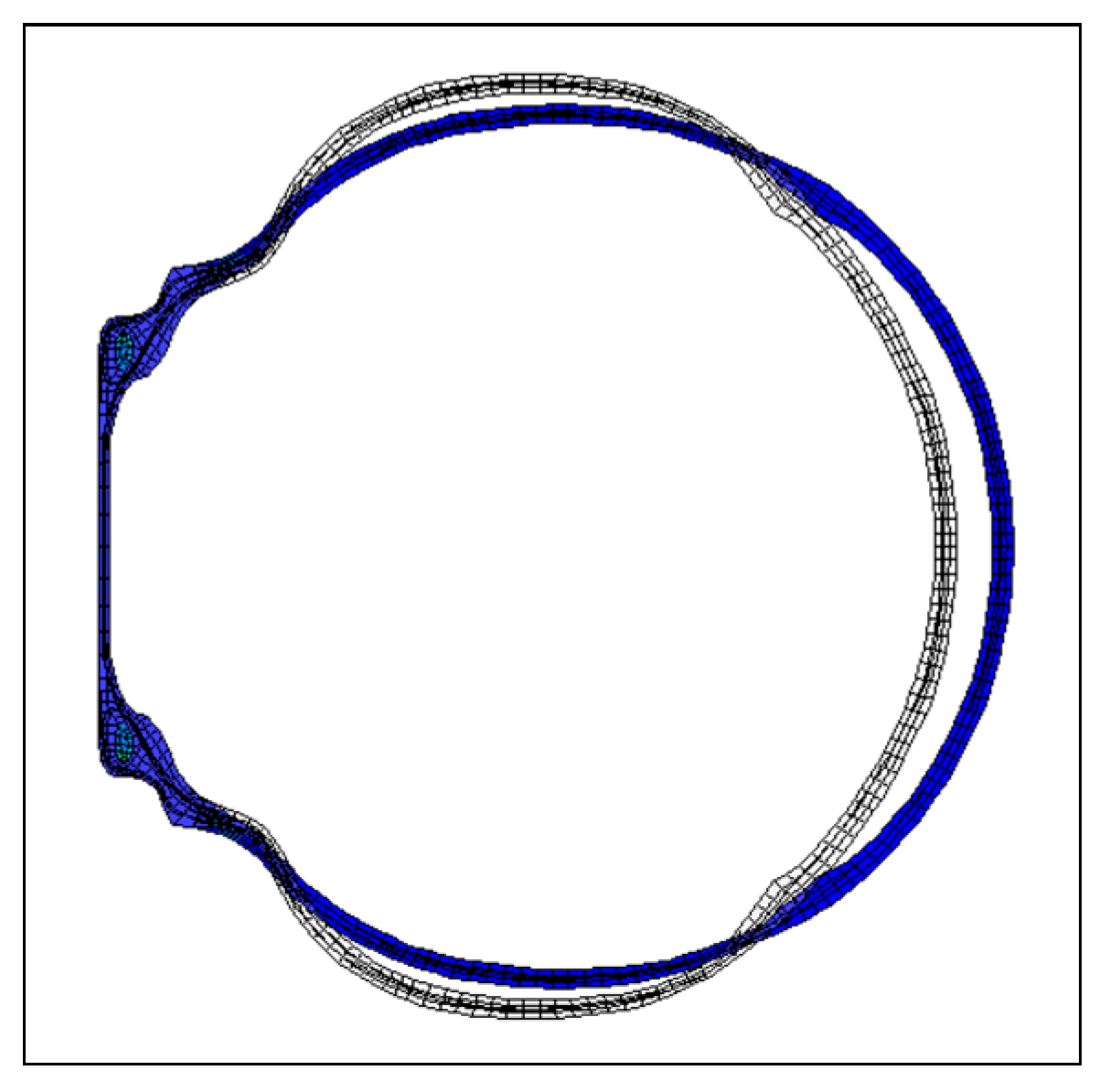
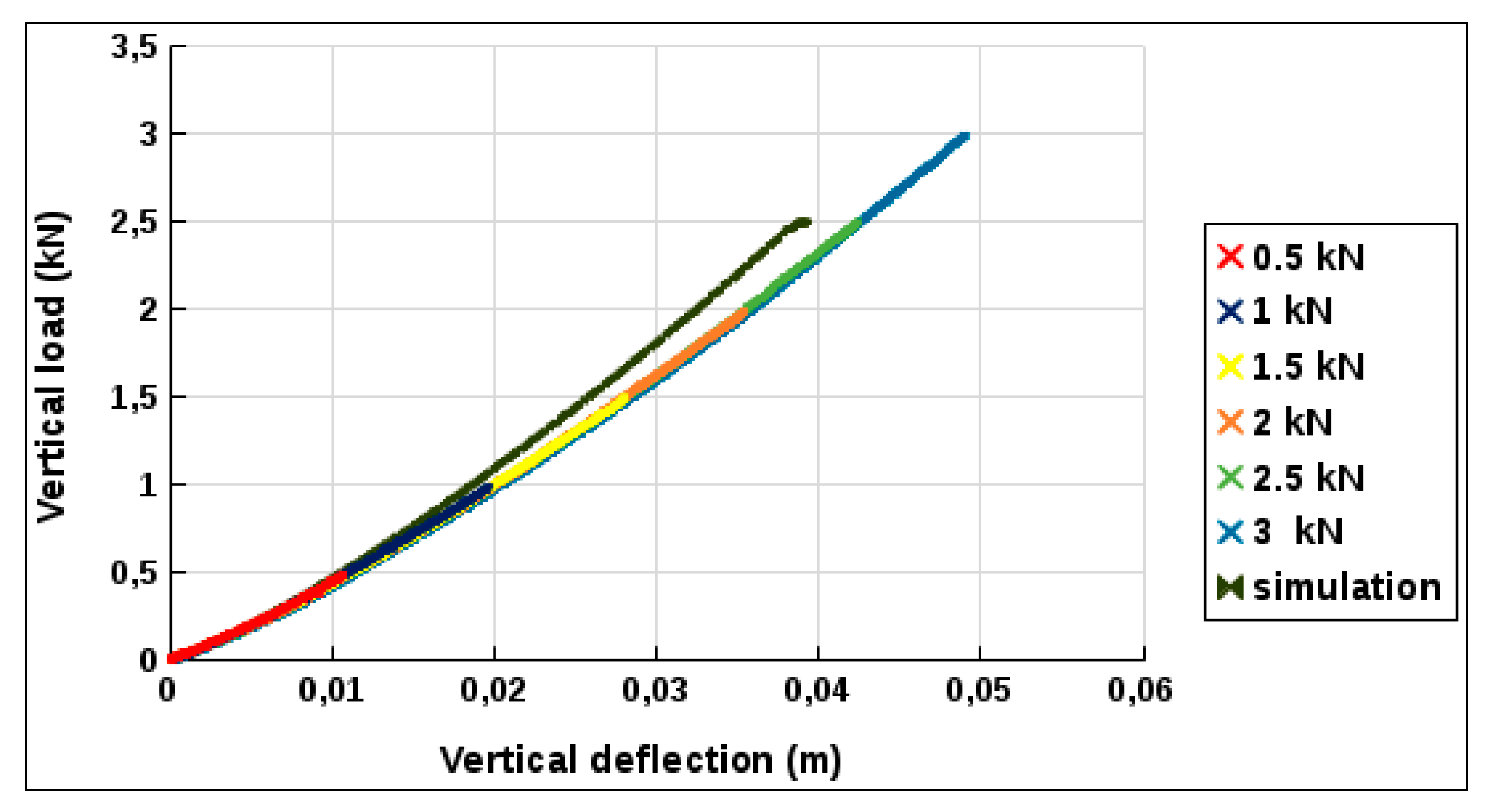
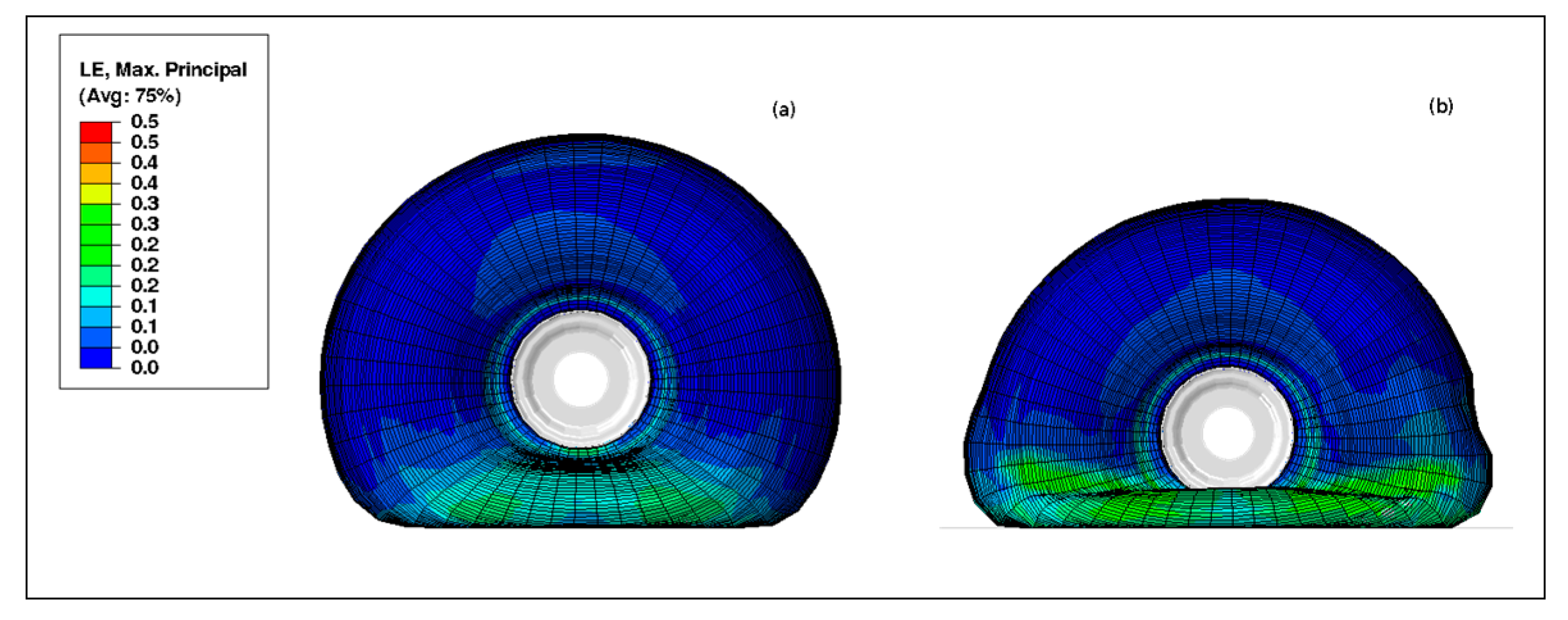
3.4.1. Vertical Loaded Tire
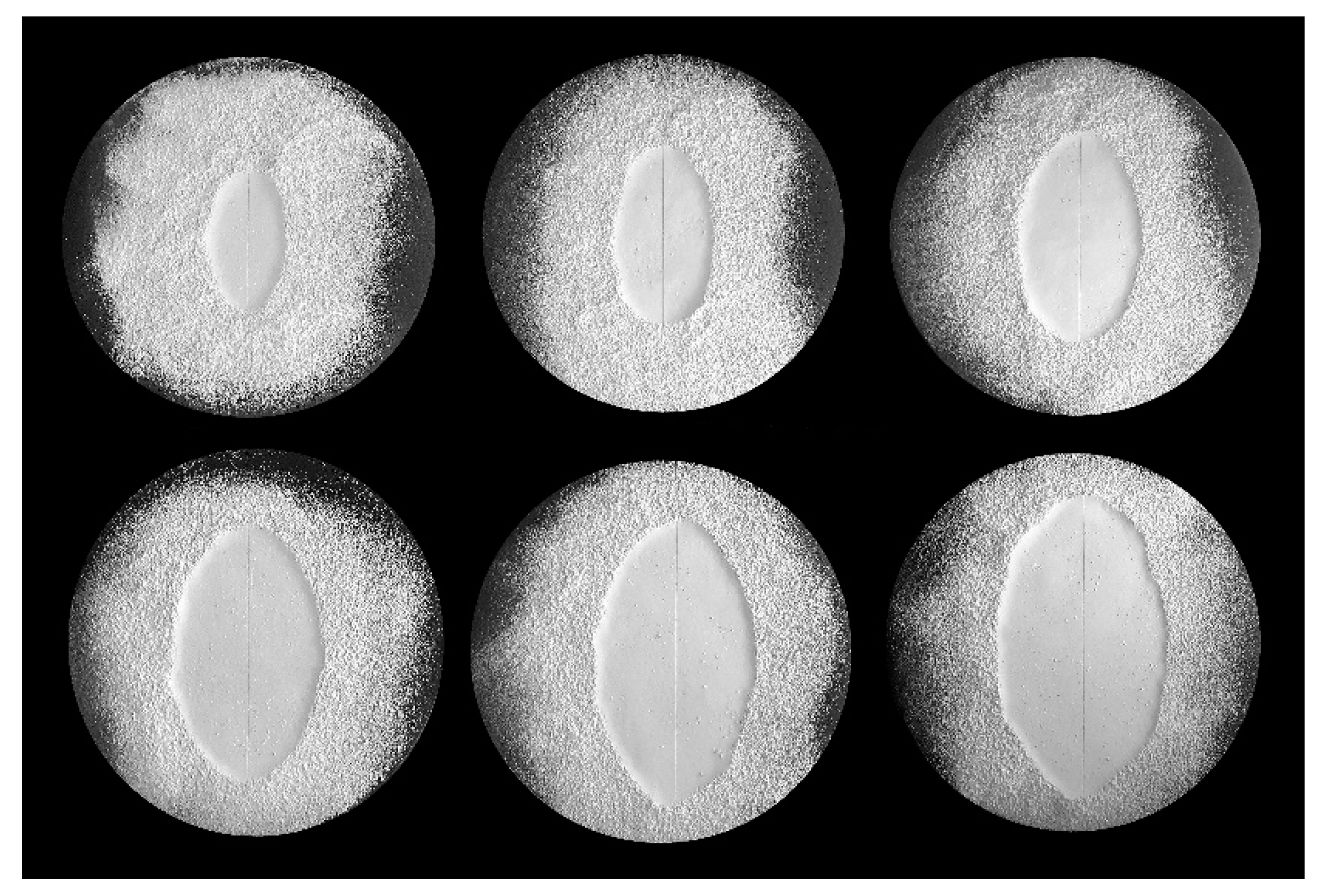
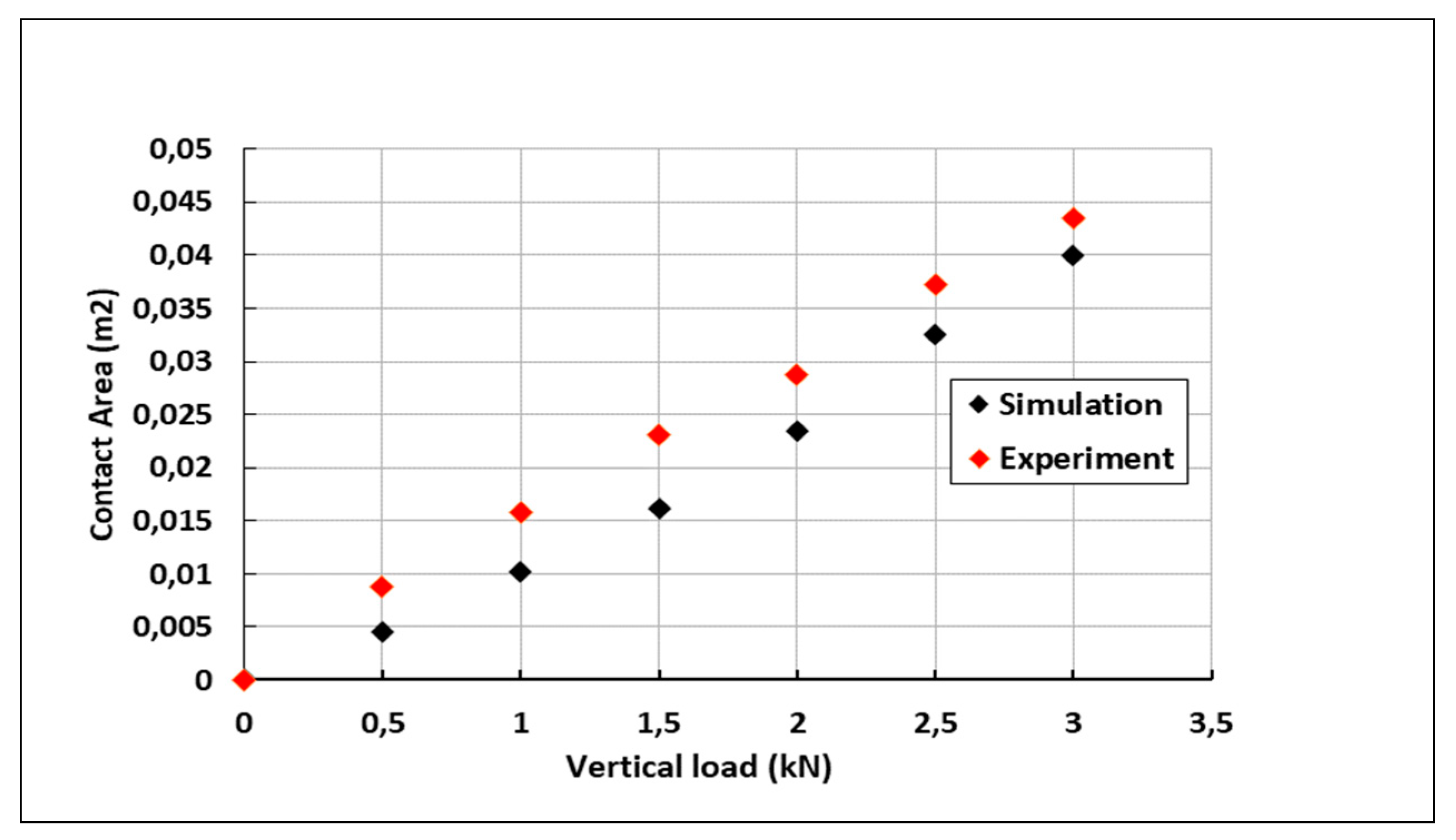
3.4.2. Contact Area
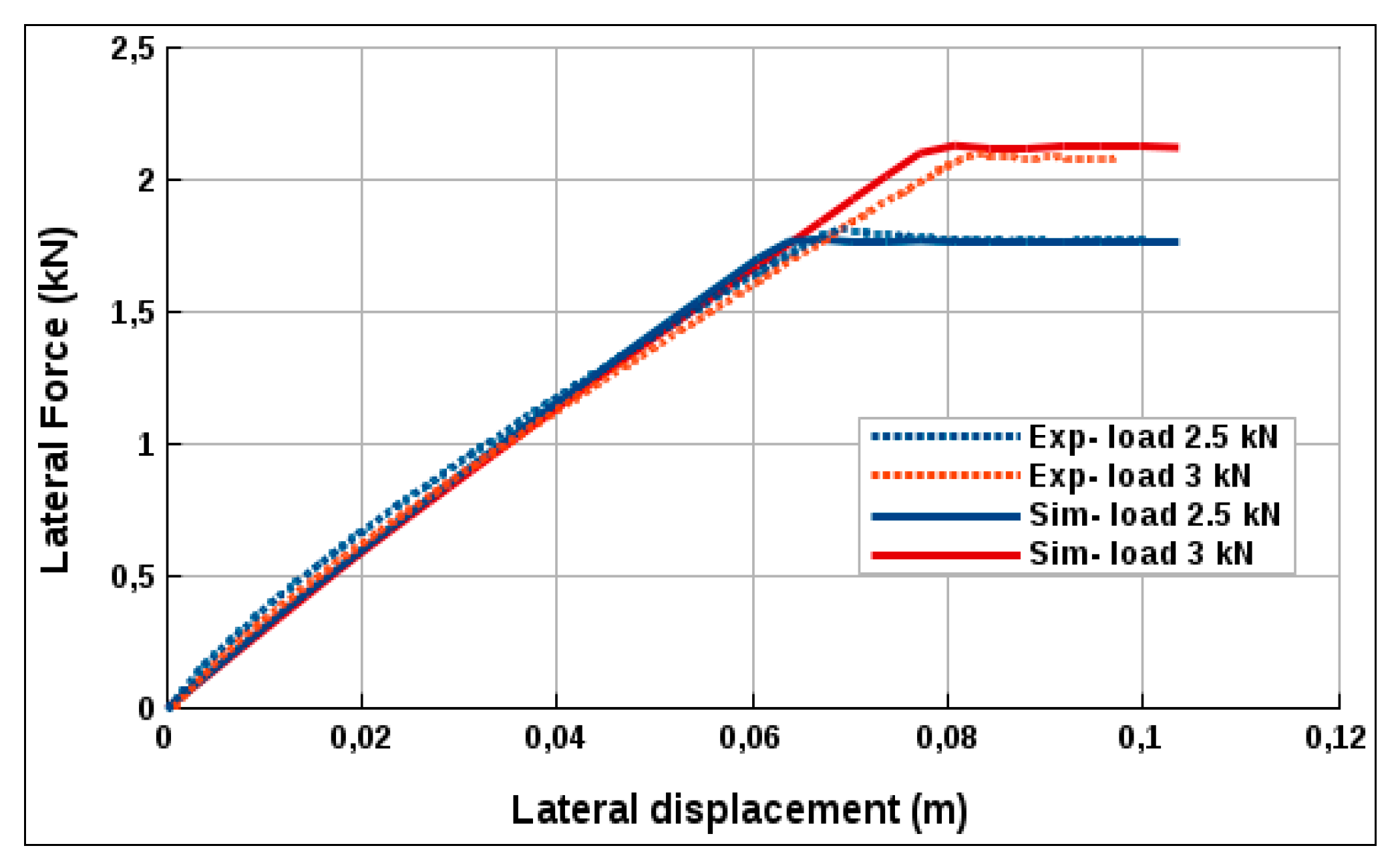
3.4.3. Lateral Loading
4. Dynamic Simulations
4.1. Simulation Steps
- acceleration phase: a progressive velocity is applied on the rim to reach a prescribed velocity of 50 kph.
- a steady phase of rolling: a constant velocity of 50 kph along the x-axis is applied on the rim while rolling on different types of runways: flat runway, runway with two successive ramps, and a runway with cleats.
- acceleration phase: a progressive velocity is applied to reach a prescribed velocity of 50 kph.
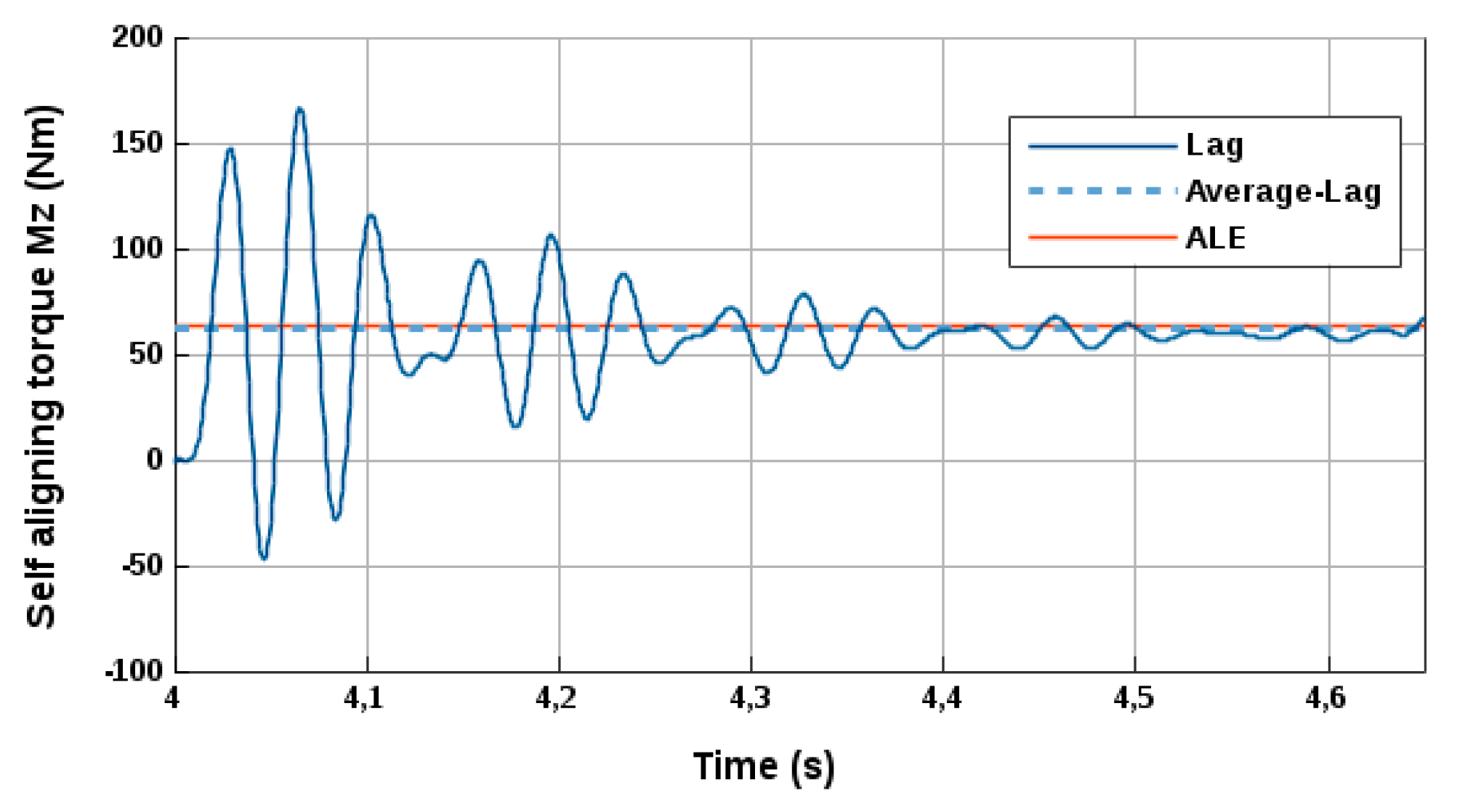
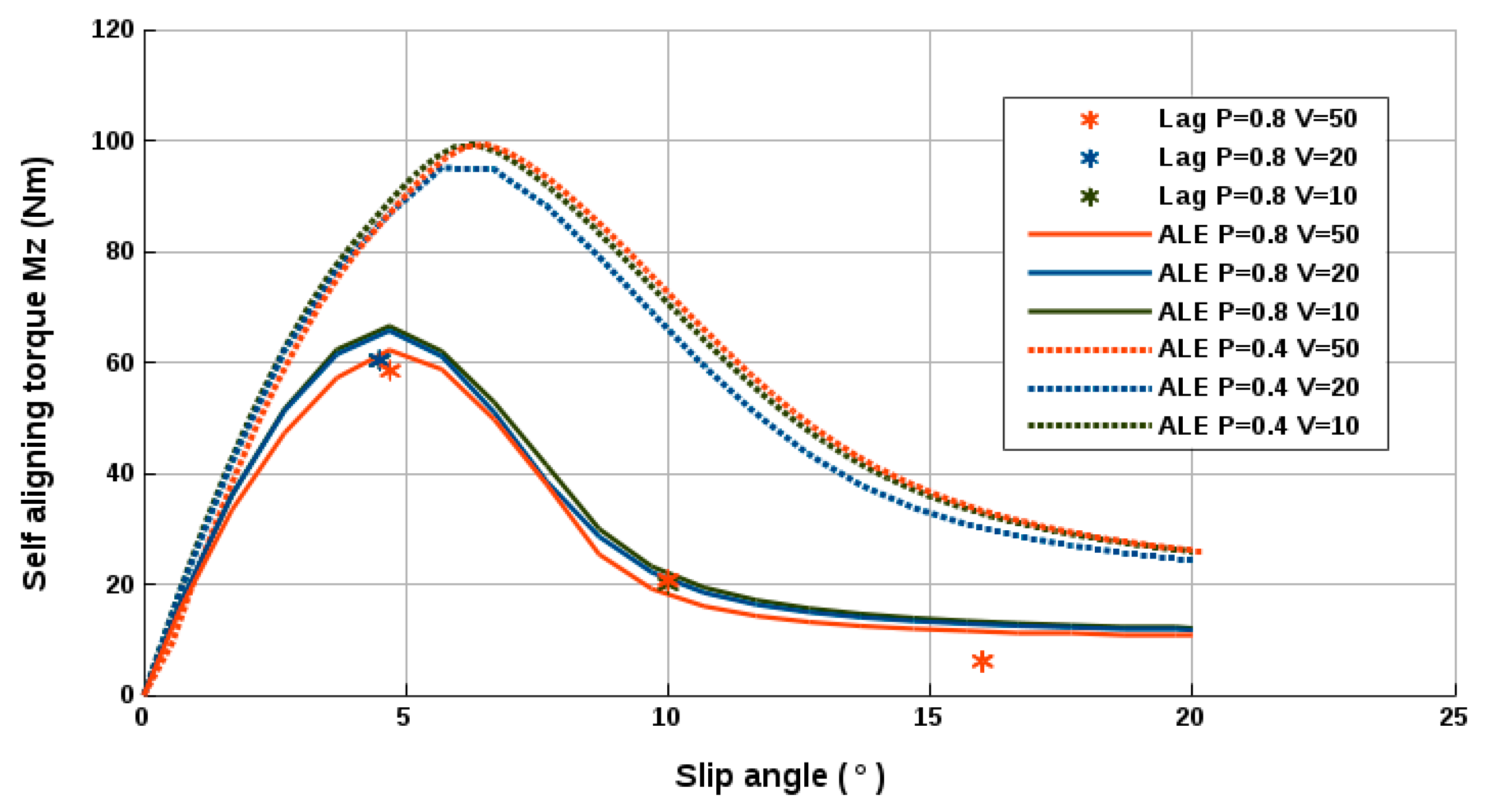
- a steady phase of cornering with constant velocity and slipping angle. By varying the slip angle, cornering simulations allow evaluating the self-aligning moment Mz and the limiting slip angle before the total loss of the adhesion.
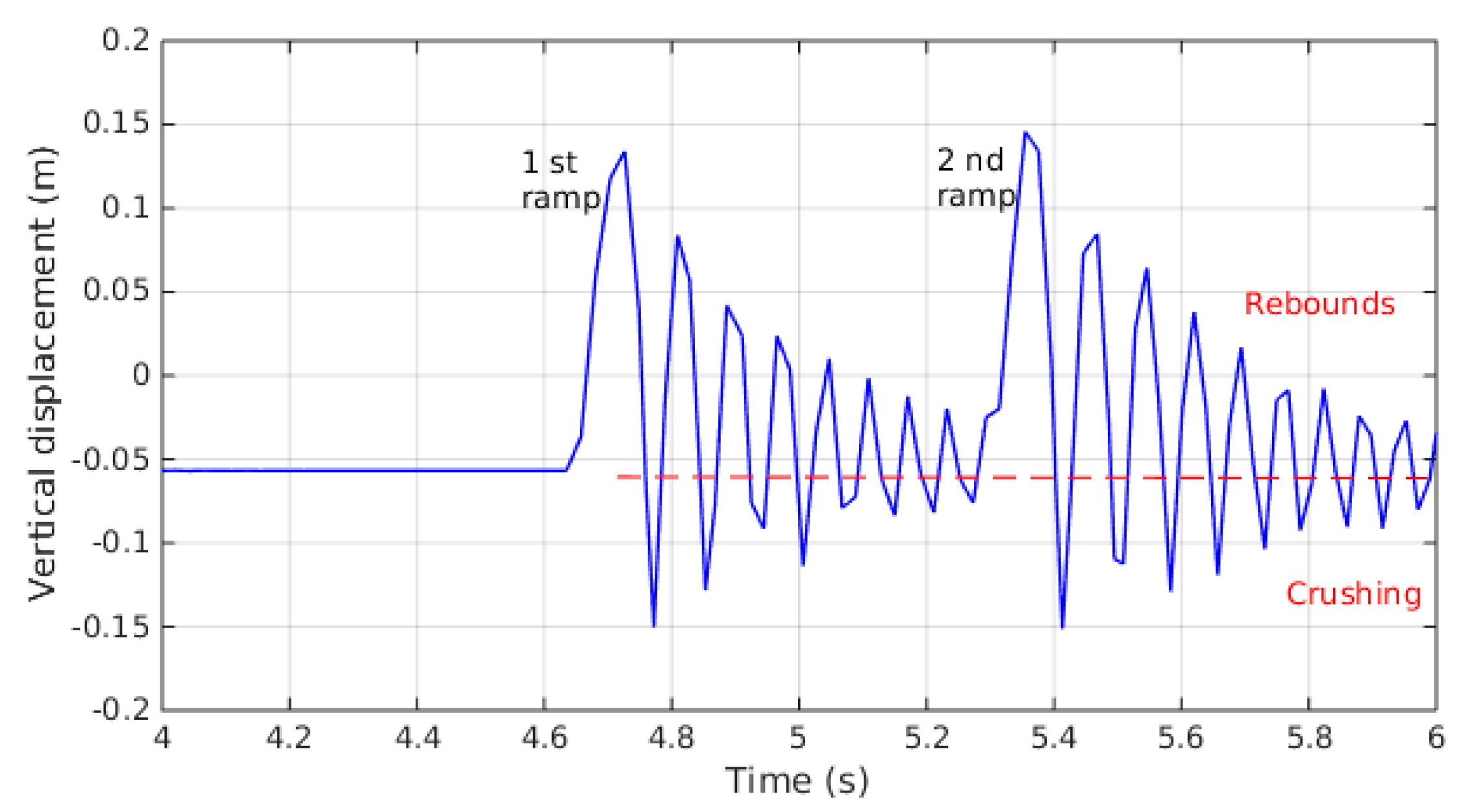
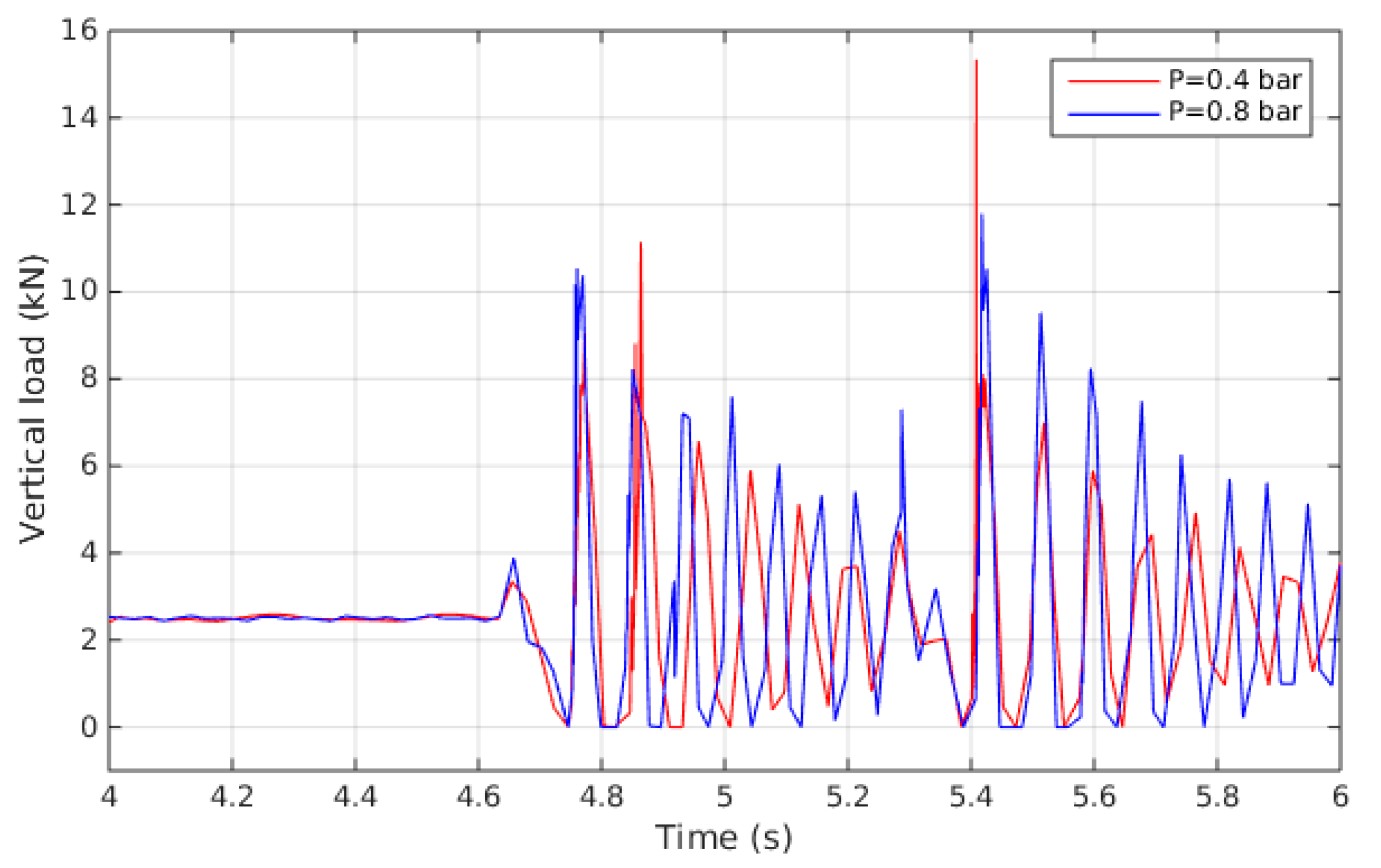
4.2. Rebounds over Ramps
4.3. Rolling over Cleats
4.4. Cornering
4.4.1. Simulation Approach
4.4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bush Plane. Available online: http://www.micheljulien.com (accessed on 1 January 2018).
- Bush Tire. Available online: http://www.beringer-aero.com (accessed on 1 January 2018).
- Pacejka, H.B.; Bakker, E. The magic formula tyre model. Veh. Syst. Dyn. 1993, 21, 1–18. [Google Scholar] [CrossRef]
- Besselink, I.J.M.; Schmeitz, A.J.C.; Pacejka, H.B. An improved Magic Formula/Swift tyre model that can handle inflation pressure changes. Veh. Syst. Dyn. 2010, 48, 337–352. [Google Scholar] [CrossRef]
- Faria, L.O.; Bass, J.M.; Oden, J.T.; Becker, E.B. A Three-Dimensional Rolling Contact Model for a Reinforced Rubber Tire. Tire Sci. Technol. 1989, 17, 217–233. [Google Scholar] [CrossRef]
- Chongfeng, W.; Oluremi, A.O. Transient dynamic behaviour of finite element tire traversing obstacles with different heights. J. Terramech. 2014, 56, 1–16. [Google Scholar]
- Palanivelu, S.; Rao, K.V.; Kumar, R.K. Determination of rolling tyre modal parameters using Finite Element techniques and Operational Modal Analysis. Mech. Syst. Signal Process. 2015, 64–65, 385–402. [Google Scholar] [CrossRef]
- Alkan, V.; Karamihas, S.M. Experimental analysis of tire-enveloping characteristics at low velocity. Veh. Syst. Dyn. 2009, 47, 575–587. [Google Scholar] [CrossRef]
- Kondé, A.K.; Rosu, I.; Lebon, F.; Brardo, O.; Devésa, B. Thermo-Mechanical analysis of an aircraft tire in cornering using coupled ALE and Lagrangian formulation. Cent. Eur. J. Eng. 2012, 3, 191–205. [Google Scholar]
- Kondé, A.K.; Rosu, I.; Lebon, F.; Brardo, O.; Devésa, B. On the modeling of aircraft tire. Aerosp. Sci. Technol. 2013, 27, 67–75. [Google Scholar] [CrossRef]
- Behroozi, M.; Olatunbosun, O.A.; Ding, W. Finite element analysis of aircraft tyre—Effect of model complexity on tyre performance characteristics. Mater. Des. 2012, 35, 810–819. [Google Scholar] [CrossRef]
- The 3DEXPERIENCE Company. Rebar modeling in shell, membrane, and surface elements. In Abaqus Theory Guide; The 3DEXPERIENCE Company: Vélizy-Villacoublay, France, 2014. [Google Scholar]
- Boyce, M.C.; Arruda, E.M. Constitutive models of rubber elasticity. Rubber Chem. Technol. 2000, 73, 504–523. [Google Scholar] [CrossRef]
- Ogden, R.W.; Saccomandi, G.; Sgura, I. Fitting hyperelastic models to experimental data. Comput. Mech. 2004, 34, 484–502. [Google Scholar] [CrossRef]
- Rivlin, R.S.; Saunders, D.W. Large elastic deformations of isotropic materials VII. Experiments on the deformation of rubber. Philos. Trans. R. Soc. Lond. Ser. A 1995, 2243, 251–288. [Google Scholar] [CrossRef]
- Crudu, M. Étude Expérimentale et Numérique des Joints Hydrauliques. Ph.D. Thesis, University of Poitiers, Poitiers, France, 2012. [Google Scholar]
- Rao, K.V.N.; Kumar, R.K. Simulation of Tire Dynamic Behavior Using Various Finite Element Techniques. Int. J. Comput. Methods Eng. Sci. Mech. 2007, 8, 363–372. [Google Scholar]
- Linke, T.; Wangenheim, M.; Lind, H.; Ripka, S. Experimental Friction and Temperature Investigation on Aircraft Tires. Tire Sci. Technol. 2014, 42, 116–144. [Google Scholar]
- Nackenhorst, U. The ALE-formulation of bodies in rolling contact—Theoretical foundations and finite element approach. Comput. Methods Appl. Mech. Eng. 2004, 193, 4299–4322. [Google Scholar] [CrossRef]
- Arif, N.; Rosu, I.; Lebon, F.; Elias-Birembaux, H. On the Modeling of Light Aircraft Landing Gears. J. Aeronaut. Aerosp. Eng. 2018, 7, 3. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fiber | Section (m2) | Spacing (m) | Orientation (°) |
|---|---|---|---|
| Aramid (Kevlar) | 2.46 × 10−8 | 0.0012 | 0.0 |
| Nylon | 2.45 × 10−7 | 0.00175 | 0.0 and 90.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arif, N.; Rosu, I.; Elias-Birembaux, H.L.; Lebon, F. Characterization and Simulation of a Bush Plane Tire. Lubricants 2019, 7, 107. https://doi.org/10.3390/lubricants7120107
Arif N, Rosu I, Elias-Birembaux HL, Lebon F. Characterization and Simulation of a Bush Plane Tire. Lubricants. 2019; 7(12):107. https://doi.org/10.3390/lubricants7120107
Chicago/Turabian StyleArif, Nadia, Iulian Rosu, Hélène Lama Elias-Birembaux, and Frédéric Lebon. 2019. "Characterization and Simulation of a Bush Plane Tire" Lubricants 7, no. 12: 107. https://doi.org/10.3390/lubricants7120107
APA StyleArif, N., Rosu, I., Elias-Birembaux, H. L., & Lebon, F. (2019). Characterization and Simulation of a Bush Plane Tire. Lubricants, 7(12), 107. https://doi.org/10.3390/lubricants7120107