

New Real-Time Impulse Noise Removal Method Applied to Chest X-ray Images

 ,
,  ,
,  , and
, and 
Abstract

1. Introduction
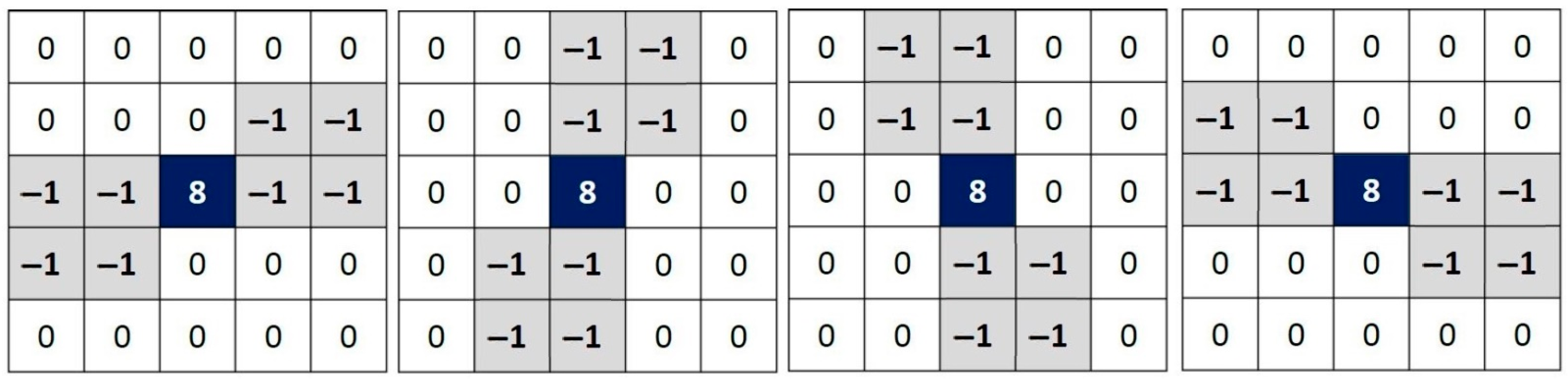
2. Modified Laplacian Vector Median Filter—MLVMF
3. MLVMF Performances
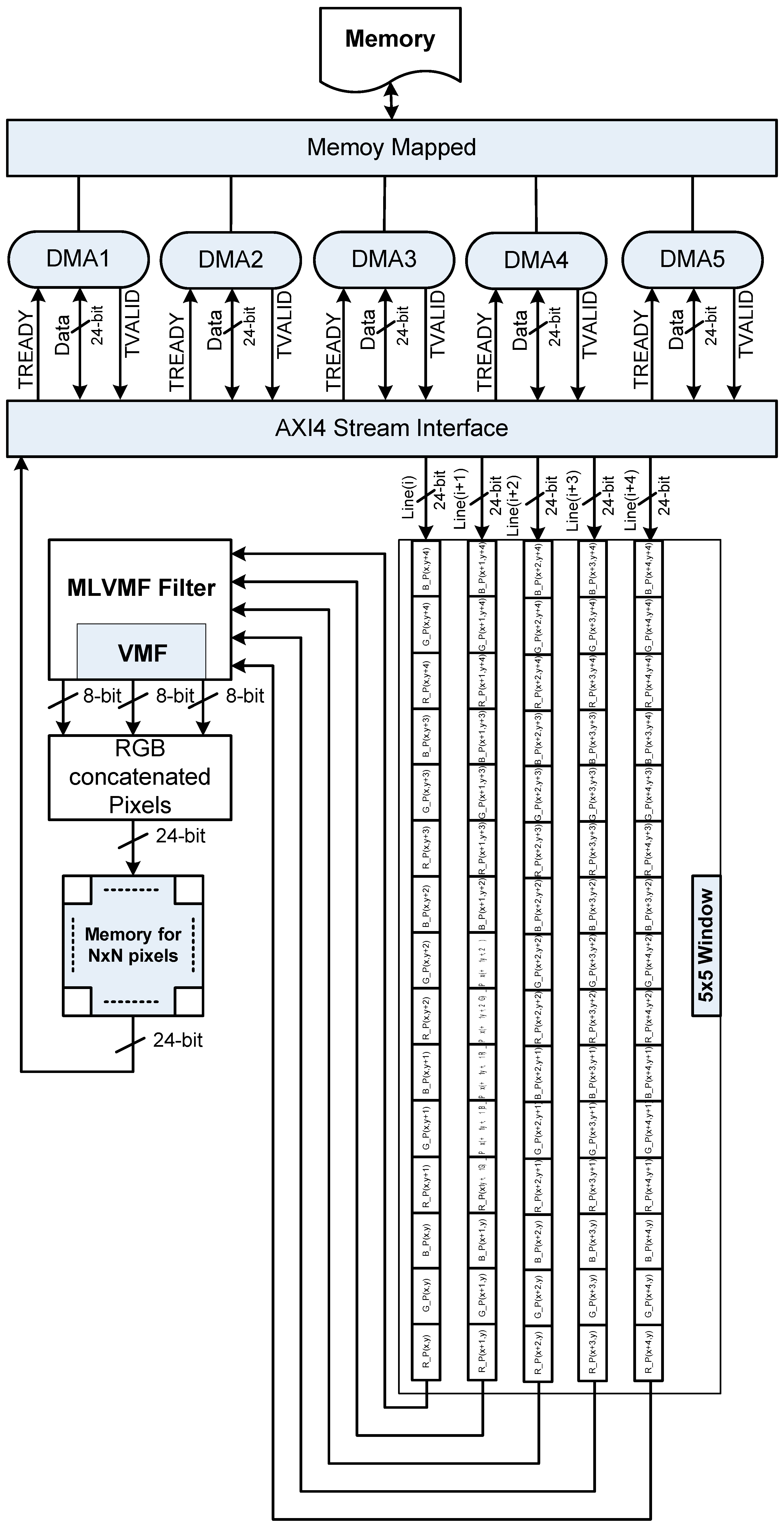
4. High-Level Synthesis (HLS) Designs for the MLVMF Filter
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Astola, J.; Haavisto, P.; Neuvo, Y. Vector median filters. Proc. IEEE 1990, 78, 678–689. [Google Scholar] [CrossRef]
- Smolka, B. Robust Sharpening Vector Median Filter. In Proceedings of the International Automatic Control Conference (CACS), Taoyuan, Taiwan, 4–7 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Smolka, B.; Szczepanski, M.; Plataniotis, K.; Venetsanopoulos, A. On the fast modified vector median filter. In Proceedings of the Canadian Conference on Electrical and Computer Engineering 2001, Toronto, ON, Canada, 13–16 May 2001; Volume 2, pp. 1315–1320. [Google Scholar] [CrossRef]
- Viero, T.; Oistamo, K.; Neuvo, Y. Three-dimensional median-related filters for color image sequence filtering. IEEE Trans. Circuits Syst. Video Technol. 1994, 4, 129–142. [Google Scholar] [CrossRef]
- Lukac, R.; Smolka, B.; Plataniotis, K.N. Sharpening vector median filters. Signal Process. 2007, 87, 2085–2099. [Google Scholar] [CrossRef]
- Trahanias, P.E.; Venetsanopoulos, A.N. Vector directional filters-a new class of multichannel image processing filters. IEEE Trans. Image Process. 1993, 2, 528–534. [Google Scholar] [CrossRef]
- Karakos, D.; Trahanias, P. Combining vector median and vector directional filters: The directional-distance filters. In Proceedings of the International Conference on Image Processing, Washington, DC, USA, 23–26 October 1995; Volume 1, pp. 171–174. [Google Scholar] [CrossRef]
- Lukac, R. Another generalisation of vector filters. In Proceedings of the International Symposium on VIPromCom Video/Image Processing and Multimedia Communications, Zadar, Croatia, 16–19 June 2002; pp. 273–278. [Google Scholar] [CrossRef]
- Smolka, B. Efficient Modification of the Central Weighted Vector Median Filter. In Joint Pattern Recognition Symposium; DAGM 2002; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany; Volume 2449. [CrossRef]
- Lukac, R. Adaptive vector median filtering. Pattern Recognit. Lett. 2003, 24, 1889–1899. [Google Scholar] [CrossRef]
- Plataniotis, K.; Androutsos, D.; Venetsanopoulos, A. Color image processing using adaptive vector directional filters. In IEEE Transactions on Circuits and Systems II: Analog and Digital Signal Processing; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 1998; Volume 45, pp. 1414–1419. [Google Scholar] [CrossRef]
- Singh, K.; Bora, P.; Singh, S. Rank-ordered mean filter for removal of impulse noise from images. In Proceedings of the 2002 IEEE International Conference on Industrial Technology, 2002. IEEE ICIT ‘02., Bangkok, Thailand, 11–14 December 2002; Volume 2, pp. 980–985. [Google Scholar] [CrossRef]
- Peris-Fajarnés, G.; Roig, B.; Vidal, A. Rank-Ordered Differences Statistic Based Switching Vector Filter. In Image Analysis and Recognition, Proceedings of the Third International Conference, ICIAR 2006, Póvoa de Varzim, Portugal, 18–20 September 2006; Lecture Notes in Computer Science; Campilho, A., Kamel, M.S., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4141. [Google Scholar] [CrossRef]
- Morillas, S.; Gregori, V.; Sapena, A. Adaptive Marginal Median Filter for Colour Images. Sensors 2011, 11, 3205–3213. [Google Scholar] [CrossRef]
- Singh, K.M.; Bora, P.K. Switching vector median filters based on non-causal linear prediction for detection of impulse noise. Imaging Sci. J. 2013, 62, 313–326. [Google Scholar] [CrossRef]
- Roy, A.; Singha, J.; Manam, L.; Laskar, R.H. Combination of adaptive vector median filter and weighted mean filter for removal of high density impulse noise from color images. IET Image Process. 2017, 11, 352–361. [Google Scholar] [CrossRef]
- Das, J.B.A.; Sarangi, A.; Mishra, D.; Mohanty, M.N. Design of RAMF for Impulsive Noise Cancelation from Chest X-Ray Image. In Advances in Intelligent Computing and Communication, Lecture Notes in Networks and Systems; Springer: Singapore, 2022; Volume 430. [Google Scholar] [CrossRef]
- Khriji, L.; Gabbouj, M. Adaptive fuzzy order statistics-rational hybrid filters for color image processing. Fuzzy Sets Syst. 2002, 128, 35–46. [Google Scholar] [CrossRef]
- Abid, I.; Boudabous, A.; Ben Atitallah, A. A new adaptive vector median rational hybrid filter for impulsive noise suppression. In Proceedings of the 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Monastir, Tunisia, 21–23 December 2015; pp. 417–421. [Google Scholar] [CrossRef]
- Plataniotis, K.; Androutsos, D.; Venetsanopoulos, A. Adaptive fuzzy systems for multichannel signal processing. Proc. IEEE 1999, 87, 1601–1622. [Google Scholar] [CrossRef]
- Wang, G.; Zhu, H.; Wang, Y. Fuzzy decision filter for color images denoising. Optik 2015, 126, 2428–2432. [Google Scholar] [CrossRef]
- Roy, A.; Manam, L.; Laskar, R.H. Region Adaptive Fuzzy Filter: An Approach for Removal of Random-Valued Impulse Noise. IEEE Trans. Ind. Electron. 2018, 65, 7268–7278. [Google Scholar] [CrossRef]
- Kong, H.; Guan, L. A neural network adaptive filter for the removal of impulse noise in digital images. Neural Netw. 1996, 9, 373–378. [Google Scholar] [CrossRef]
- Solovyeva, E. Cellular neural network as a non-linear filter of impulse noise. In Proceedings of the 2017 20th Conference of Open Innovations Association (FRUCT), St. Petersburg, Russia, 3–7 April 2017; pp. 420–426. [Google Scholar] [CrossRef]
- Radlak, K.; Malinski, L.; Smolka, B. Deep Learning Based Switching Filter for Impulsive Noise Removal in Color Images. Sensors 2020, 20, 2782. [Google Scholar] [CrossRef] [PubMed]
- Liang, S.-F.; Lu, S.-M.; Chang, J.-Y.; Lin, C.-T. A Novel Two-Stage Impulse Noise Removal Technique Based on Neural Networks and Fuzzy Decision. IEEE Trans. Fuzzy Syst. 2008, 16, 863–873. [Google Scholar] [CrossRef]
- Naveen, Y.; Gupta, S. Removal of Salt and Pepper Noise Using Sparse Representation. In Proceedings of the 2012 Eighth International Conference on Signal Image Technology and Internet Based Systems, Naples, Italy, 26–29 November 2012; pp. 58–63. [Google Scholar] [CrossRef]
- Lei, T.; Wang, Y.; Luo, W. Multivariate Self-Dual Morphological Operators Based on Extremum Constraint. Math. Probl. Eng. 2015, 2015, 596348. [Google Scholar] [CrossRef]
- Das, P.; Mukherjee, S.; Das, P.; Banerjee, S. Characterizing chaos and multifractality in noise-assisted tumor-immune interplay. Nonlinear Dyn. 2020, 101, 675–685. [Google Scholar] [CrossRef]
- Sato, Y.; Yamamoto, N.; Inagaki, N.; Iesaki, Y.; Asamoto, T.; Suzuki, T.; Takahara, S. Deep Learning for Bone Mineral Density and T-Score Prediction from Chest X-rays: A Multicenter Study. Biomedicines 2022, 10, 2323. [Google Scholar] [CrossRef]
- Ramadhan, A.A.; Baykara, M. A Novel Approach to Detect COVID-19: Enhanced Deep Learning Models with Convolutional Neural Networks. Appl. Sci. 2022, 12, 9325. [Google Scholar] [CrossRef]
- Sharma, N.; Saba, L.; Khanna, N.N.; Kalra, M.K.; Fouda, M.M.; Suri, J.S. Segmentation-Based Classification Deep Learning Model Embedded with Explainable AI for COVID-19 Detection in Chest X-ray Scans. Diagnostics 2022, 12, 2132. [Google Scholar] [CrossRef]
- Kaya, Y.; Yiner, Z.; Kaya, M.; Kuncan, F. A new approach to COVID-19 detection from X-ray images using angle transformation with GoogleNet and LSTM. Meas. Sci. Technol. 2022, 33, 124011. [Google Scholar] [CrossRef]
- Eken, S. A topic-based hierarchical publish/subscribe messaging middleware for COVID-19 detection in X-ray image and its metadata. Soft Comput. 2020, 24, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Yilmaz, A. Diagnosing COVID-19 from X-Ray images with using multi-channel CNN architecture. J. Fac. Eng. Archit. Gazi Univ. 2021, 36, 1761–1774. [Google Scholar] [CrossRef]
- Nair, R.; Alhudhaif, A.; Koundal, D.; Doewes, R.I.; Sharma, P. Deep learning-based COVID-19 detection system using pulmonary CT scans. Turk. J. Electr. Eng. Comput. Sci. 2021, 29, 2716–2727. [Google Scholar] [CrossRef]
- Gökcen, A.; Kalyoncu, C. Real-time impulse noise removal. J. Real-Time Image Process. 2018, 17, 459–469. [Google Scholar] [CrossRef]
- HosseinKhani, Z.; Hajabdollahi, M.; Karimi, N.; Soroushmehr, R.; Shirani, S.; Najarian, K.; Samavi, S. Adaptive Real-Time Removal of Impulse Noise in Medical Images. J. Med. Syst. 2018, 42, 216. [Google Scholar] [CrossRef]
- Ben Atitallah, A. An FPGA Design for Real-Time Image Denoising. Comput. Syst. Sci. Eng. 2022, 43, 803–816. [Google Scholar] [CrossRef]
- Boudabous, A.; Ben Atitallah, A.; Khriji, L.; Kadionik, P.; Masmoudi, N. HW/SW design- based implementation of vector median rational hybrid filter. Int. Arab J. Inf. Technol. 2010, 7, 70–74. [Google Scholar]
- Ben Atitallah, A.; Abid, I. An efficient FPGA implementation of AVMF filter using High-Level Synthesis. In Proceedings of the 2020 20th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Sfax, Tunisia, 20–22 December 2020; pp. 82–85. [Google Scholar] [CrossRef]
- Kim, J.; Wills, D.S. Fast vector median filter implementation using the color pack instruction set. In Proceedings of the 2002 IEEE 10th Digital Signal Processing Workshop, and the 2nd Signal Processing Education Workshop, Pine Mountain, GA, USA, 13–16 October 2002; pp. 339–343. [Google Scholar] [CrossRef]
- Khriji, L. Vector Directional Distance Rational Hybrid Filters for Color Image Restoration. J. Eng. Res. [TJER] 2005, 2, 1–12. [Google Scholar] [CrossRef]
- Ben Atitallah, A. A New Adaptive Filter to Remove Impulsive Noise in Color Images. IEEJ Trans. Electr. Electron. Eng. 2022, 17, 1048–1053. [Google Scholar] [CrossRef]
- Pilevar, A.H.; Saien, S.; Khandel, M.; Mansoori, B. A new filter to remove salt and pepper noise in color images. Signal Image Video Process. 2013, 9, 779–786. [Google Scholar] [CrossRef]
- Wang, G.; Li, D.; Pan, W.; Zang, Z. Modified switching median filter for impulse noise removal. Signal Process. 2010, 90, 3213–3218. [Google Scholar] [CrossRef]
- Hu, Y.; Ji, H. Research on Image Median Filtering Algorithm and Its FPGA Implementation. In Proceedings of the 2009 WRI Global Congress on Intelligent Systems, Washington, DC, USA, 19–21 May 2009; pp. 226–230. [Google Scholar] [CrossRef]
- Lee, T.W.; Lee, J.H.; Cho, S.B. FPGA Implementation of a 3/spl times/3 window median filter based on a new efficient bit-serial sorting algorithm. In Proceedings of the 7th Korea-Russia International Symposium on Science and Technology, Proceedings KORUS 2003. (IEEE Cat. No.03EX737), Ulsan, Korea, 28 June–6 July 2003; Volume 2, pp. 237–242. [Google Scholar]
- Boudabous, A.; Khriji, L.; Ben Atitallah, A.; Kadionik, P.; Masmoudi, N. Efficient architecture and implementation of vector median filter in co-design context. RadioEng.-Prague 2007, 16, 113–119. [Google Scholar]
- Kthiri, M.; Le Gal, B.; Kadionik, P.; Ben Atitallah, A. A Very High Throughput Deblocking Filter for H.264/AVC. J. Signal Process. Syst. 2013, 73, 189–199. [Google Scholar] [CrossRef]
- Ben Atitallah, A.; Kadionik, P.; Ghozzi, F.; Nouel, P.; Masmoudi, N.; Marchegay, P. Optimization and Implementation on Fpga of the DCT/IDCT Algorithm. In Proceedings of the 2006 IEEE International Conference on Acoustics Speech and Signal Processing, Toulouse, France, 14–19 May 2006; p. III. [Google Scholar] [CrossRef]
- Ben Atitallah, A.; Abid, I.; Boudabous, A.; Loukil, H. A new hardware architecture of the adaptive vector median filter and validation in a hardware/software environment. Int. J. Circuit Theory Appl. 2021, 49, 2329–2347. [Google Scholar] [CrossRef]
- Ben Atitallah, A.; Kammoun, M.; Ali, K.M.; Ben Atitallah, R. An FPGA comparative study of high-level and low-level combined designs for HEVC intra, inverse quantization, and IDCT/IDST 2D modules. Int. J. Circuit Theory Appl. 2020, 48, 1274–1290. [Google Scholar] [CrossRef]
- Kammoun, M.; Ben Atitallah, A.; Ali, K.M.A.; Ben Atitallah, R. Case study of an HEVC decoder application using high-level synthesis: Intraprediction, dequantization, and inverse transform blocks. J. Electron. Imaging 2019, 28, 033010. [Google Scholar] [CrossRef]
- Alanazi, T.M.; Ben Atitallah, A.; Abid, I. An Optimized SW/HW AVMF Design Based on High-Level Synthesis Flow for Color Images. Comput. Mater. Contin. 2021, 68, 2925–2943. [Google Scholar] [CrossRef]
- Winther, H.B.; Laser, H.; Gerbel, S.; Maschke, S.K.; Hinrichs, J.B.; Vogel-Claussen, J.; Wacker, F.K.; Höper, M.M.; Meyer, B.C. COVID-19 Image Repository. Figshare Dataset 2020. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter | VMF | VMRHF | MSMF | MLVMF | |||||
|---|---|---|---|---|---|---|---|---|---|
| Image | Noise | PSNR (dB) | NCD | PSNR (dB) | NCD | PSNR (dB) | NCD | PSNR (dB) | NCD |
| Lena | 3% | 32.340147 | 0.017115 | 32.782660 | 0.015688 | 35.472474 | 0.004766 | 37.423460 | 0.0042894 |
| 5% | 31.728372 | 0.018811 | 32.100663 | 0.017784 | 33.911660 | 0.008693 | 35.844625 | 0.0079106 | |
| 10% | 29.577089 | 0.023299 | 29.734905 | 0.024349 | 30.400635 | 0.017641 | 32.087870 | 0.0159651 | |
| 20% | 25.232852 | 0.041481 | 25.244443 | 0.052842 | 25.084609 | 0.049493 | 26.414093 | 0.0345932 | |
| 30% | 20.856752 | 0.096637 | 21.130595 | 0.118374 | 20.657001 | 0.116282 | 21.731165 | 0.0955841 | |
| Peppers | 3% | 34.518151 | 0.012914 | 35.044101 | 0.011567 | 36.409296 | 0.005163 | 38.375398 | 0.0045951 |
| 5% | 33.217095 | 0.014426 | 33.596334 | 0.013441 | 34.123878 | 0.009285 | 36.068939 | 0.0084494 | |
| 10% | 30.370972 | 0.018116 | 30.448538 | 0.019125 | 30.270752 | 0.020890 | 32.026456 | 0.0181743 | |
| 20% | 25.730744 | 0.035530 | 25.695894 | 0.046225 | 25.121437 | 0.057862 | 26.477995 | 0.0314972 | |
| 30% | 21.196992 | 0.083353 | 21.466820 | 0.103619 | 20.905560 | 0.117288 | 22.034460 | 0.0764975 | |
| CXR1 | 3% | 33.637944 | 0.007440 | 33.797730 | 0.008316 | 35.523118 | 0.002363 | 37.476889 | 0.0021267 |
| 5% | 32.265345 | 0.008059 | 32.343503 | 0.010048 | 33.248306 | 0.004593 | 35.209956 | 0.0041796 | |
| 10% | 29.716387 | 0.011066 | 29.690418 | 0.016741 | 29.858881 | 0.011025 | 31.590696 | 0.0099776 | |
| 20% | 24.991928 | 0.027388 | 24.956495 | 0.046715 | 24.704409 | 0.038274 | 25.939629 | 0.0274849 | |
| 30% | 20.404829 | 0.081102 | 20.680126 | 0.113743 | 20.243625 | 0.101027 | 21.296294 | 0.0717325 | |
| CXR2 | 3% | 35.571872 | 0.009196 | 35.826513 | 0.007403 | 36.795335 | 0.003027 | 38.782283 | 0.0026940 |
| 5% | 33.170338 | 0.010195 | 33.264613 | 0.008741 | 33.436260 | 0.005518 | 35.342127 | 0.0050214 | |
| 10% | 30.882192 | 0.011984 | 30.774950 | 0.013983 | 30.471932 | 0.011975 | 32.239304 | 0.0104183 | |
| 20% | 25.765780 | 0.025517 | 25.680567 | 0.040658 | 25.238697 | 0.033607 | 26.601587 | 0.0239102 | |
| 30% | 20.448200 | 0.079880 | 20.697093 | 0.112506 | 20.281939 | 0.091909 | 21.377164 | 0.0734534 | |
| CXR3 | 3% | 37.002201 | 0.004489 | 37.195887 | 0.004118 | 38.126856 | 0.002395 | 40.223833 | 0.0021555 |
| 5% | 34.776916 | 0.005016 | 34.799607 | 0.005191 | 35.126686 | 0.004735 | 37.128907 | 0.0043089 | |
| 10% | 31.703067 | 0.006751 | 31.494476 | 0.009411 | 31.463504 | 0.010426 | 33.209728 | 0.0054355 | |
| 20% | 26.207766 | 0.021795 | 26.062978 | 0.038572 | 25.760547 | 0.036464 | 27.125856 | 0.0188541 | |
| 30% | 21.351850 | 0.077362 | 21.600711 | 0.107416 | 21.129428 | 0.097884 | 22.228158 | 0.0738787 | |
| Average | - | 28.906630 | 0.029957 | 29.044420 | 0.038663 | 29.350670 | 0.034503 | 30.970270 | 0.0253275 |
| LUT | FF | BRAM_18K | DSP48E | Cycles | |
|---|---|---|---|---|---|
| Solution1 | 10,687 (4%) | 6590 (1%) | 125 (7%) | 13 (0.5%) | 209,546,135 |
| Solution2 | 43,343 (16%) | 42,228 (8%) | 125 (7%) | 650 (26%) | 5,304,902 |
| Solution3 | 45,939 (17%) | 43,685 (8%) | 135 (8%) | 665 (26%) | 1,135,576 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rashid, N.; Berriri, K.; Albekairi, M.; Kaaniche, K.; Ben Atitallah, A.; Khan, M.A.; El-Hamrawy, O.I. New Real-Time Impulse Noise Removal Method Applied to Chest X-ray Images. Diagnostics 2022, 12, 2738. https://doi.org/10.3390/diagnostics12112738
Rashid N, Berriri K, Albekairi M, Kaaniche K, Ben Atitallah A, Khan MA, El-Hamrawy OI. New Real-Time Impulse Noise Removal Method Applied to Chest X-ray Images. Diagnostics. 2022; 12(11):2738. https://doi.org/10.3390/diagnostics12112738
Chicago/Turabian StyleRashid, Nasr, Kamel Berriri, Mohammed Albekairi, Khaled Kaaniche, Ahmed Ben Atitallah, Muhammad Attique Khan, and Osama I. El-Hamrawy. 2022. "New Real-Time Impulse Noise Removal Method Applied to Chest X-ray Images" Diagnostics 12, no. 11: 2738. https://doi.org/10.3390/diagnostics12112738
APA StyleRashid, N., Berriri, K., Albekairi, M., Kaaniche, K., Ben Atitallah, A., Khan, M. A., & El-Hamrawy, O. I. (2022). New Real-Time Impulse Noise Removal Method Applied to Chest X-ray Images. Diagnostics, 12(11), 2738. https://doi.org/10.3390/diagnostics12112738