Dependency of Machine Efficiency on the Thermal Behavior of Induction Machines

 ,
,
Abstract
1. Introduction
2. State-of-the-Art
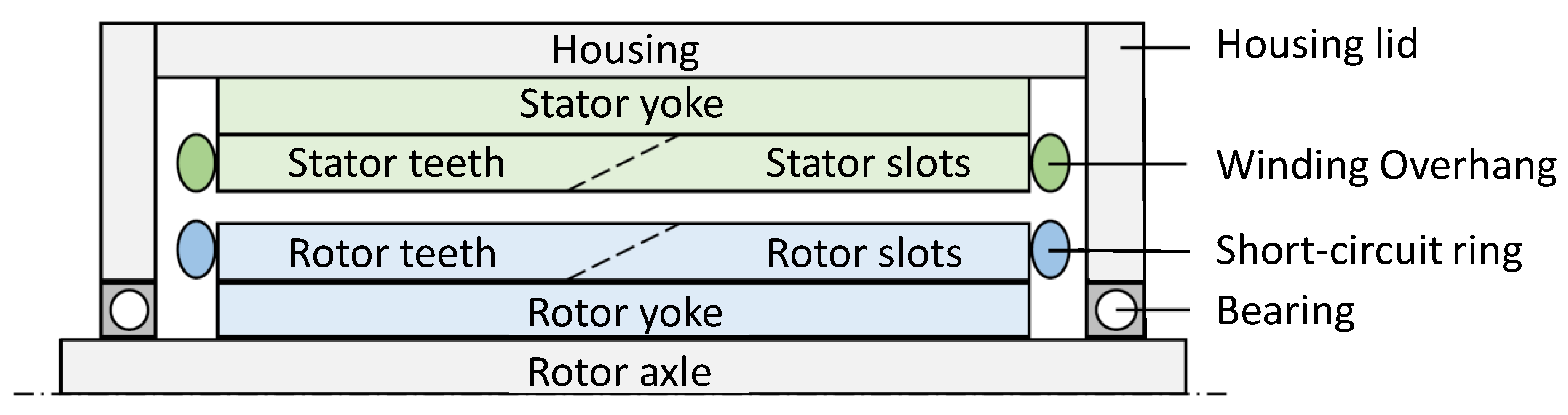
2.1. Fundamentals of IMs
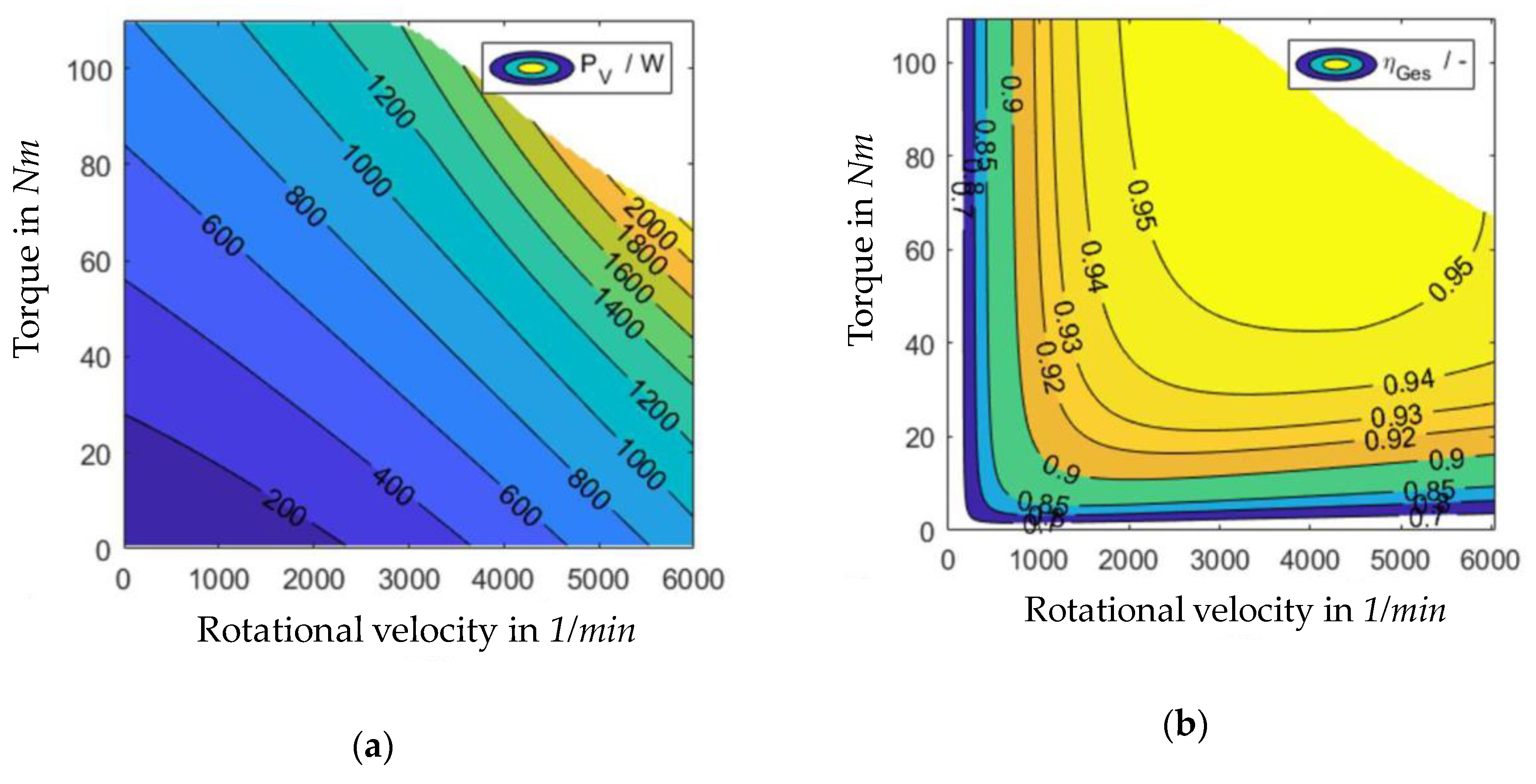
2.2. Thermal Losses and Efficiency
2.3. Temperature-Dependency of Losses
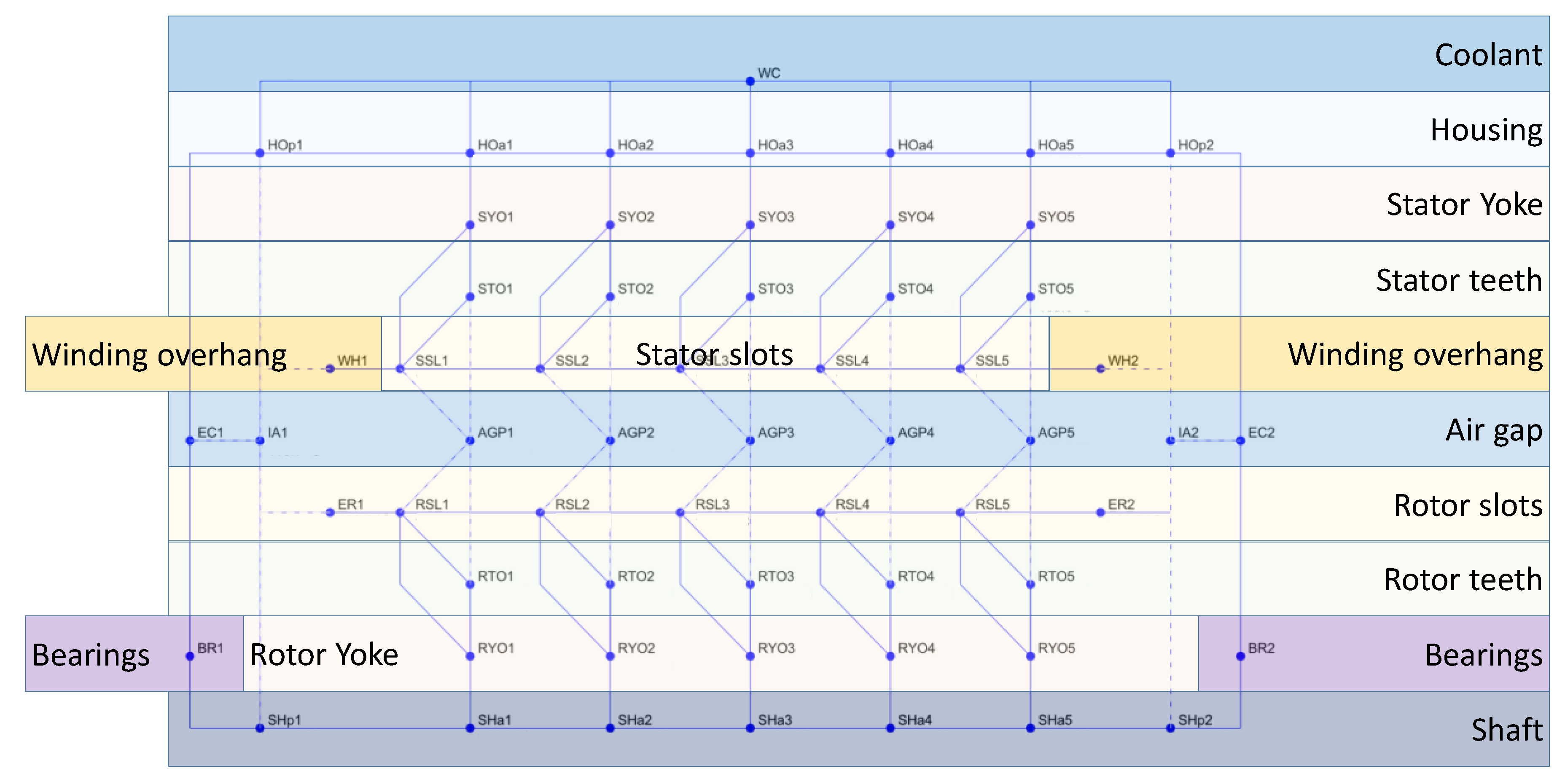
2.4. Thermal Modeling
- “Dark Gray Box LPTN”: Low-order thermal network with 2–5 nodes for the most important heat conduction paths. They have a low modeling effort because the system is strongly abstracted. The parameters of such networks have to be determined by abstraction from experimentally obtained training data.
- “Light Gray Box LPTN”: Important components are modeled, but each has a low spatial resolution (usually one node per component). Thus, these LPTNs usually reach 5–12 nodes. The parameters of the network are calculated using material- and dimension-specific data of the components. They can also be further optimized with the help of measurement data.
- “White-Box LPTN”: In comparison to the “Light Gray Box LPTN”, the critical and important components are modeled locally in high resolution. This results in a large number of nodes. The parameters of the network are based exclusively on material- and dimension-specific data.
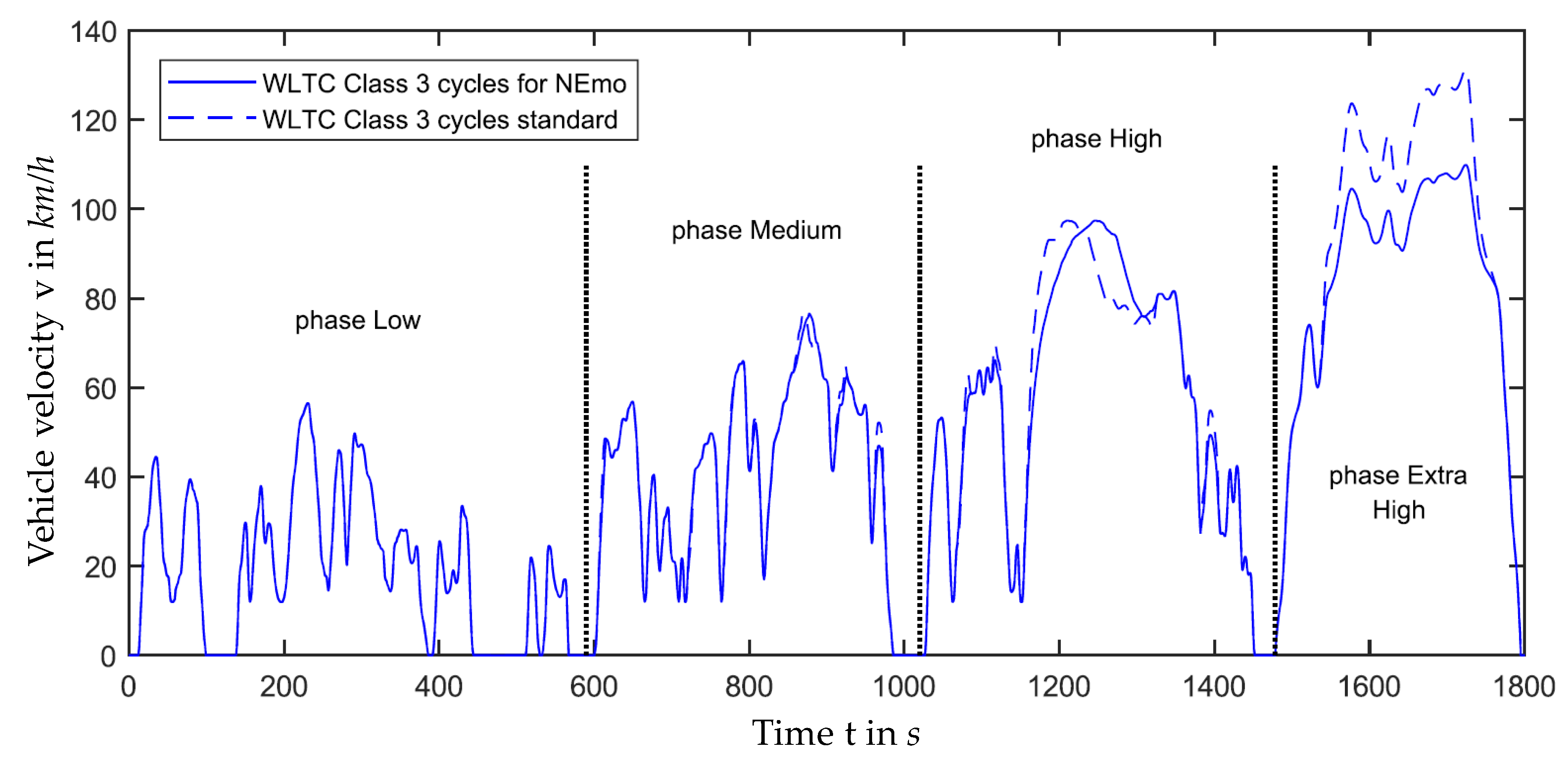
2.5. Vehicle Modeling
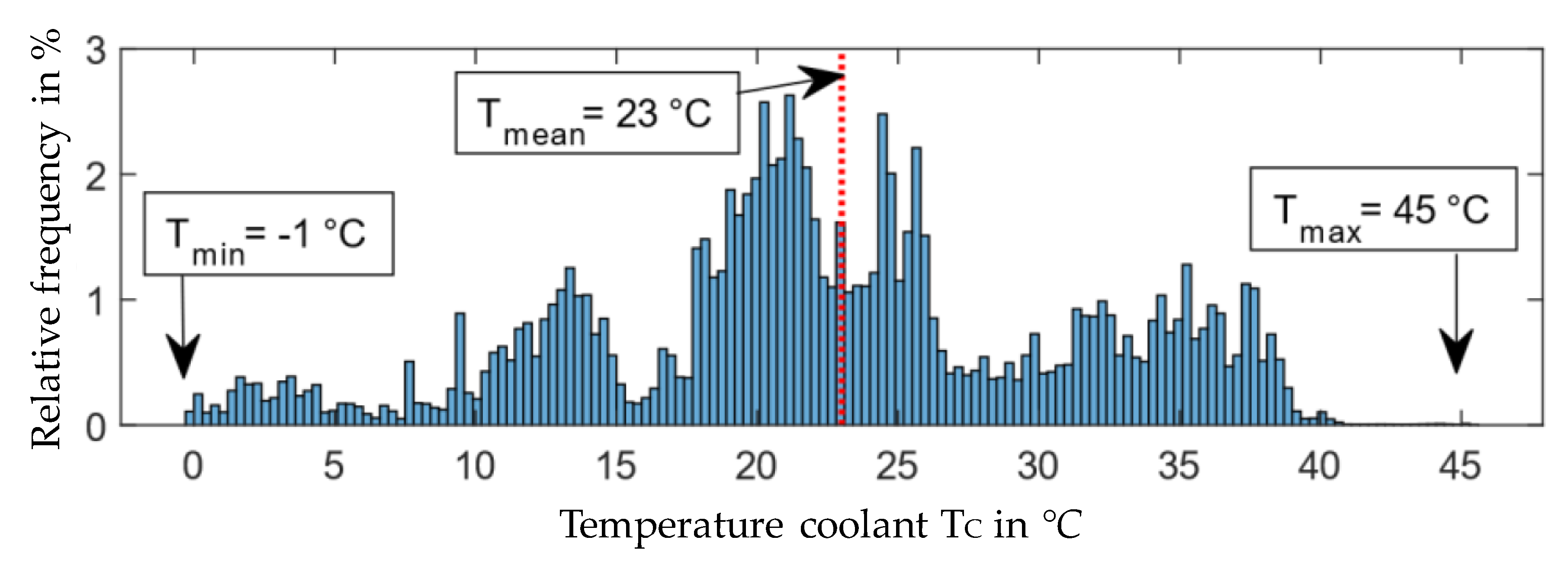
3. Measured Driving Data
4. Thermal and Vehicle Model
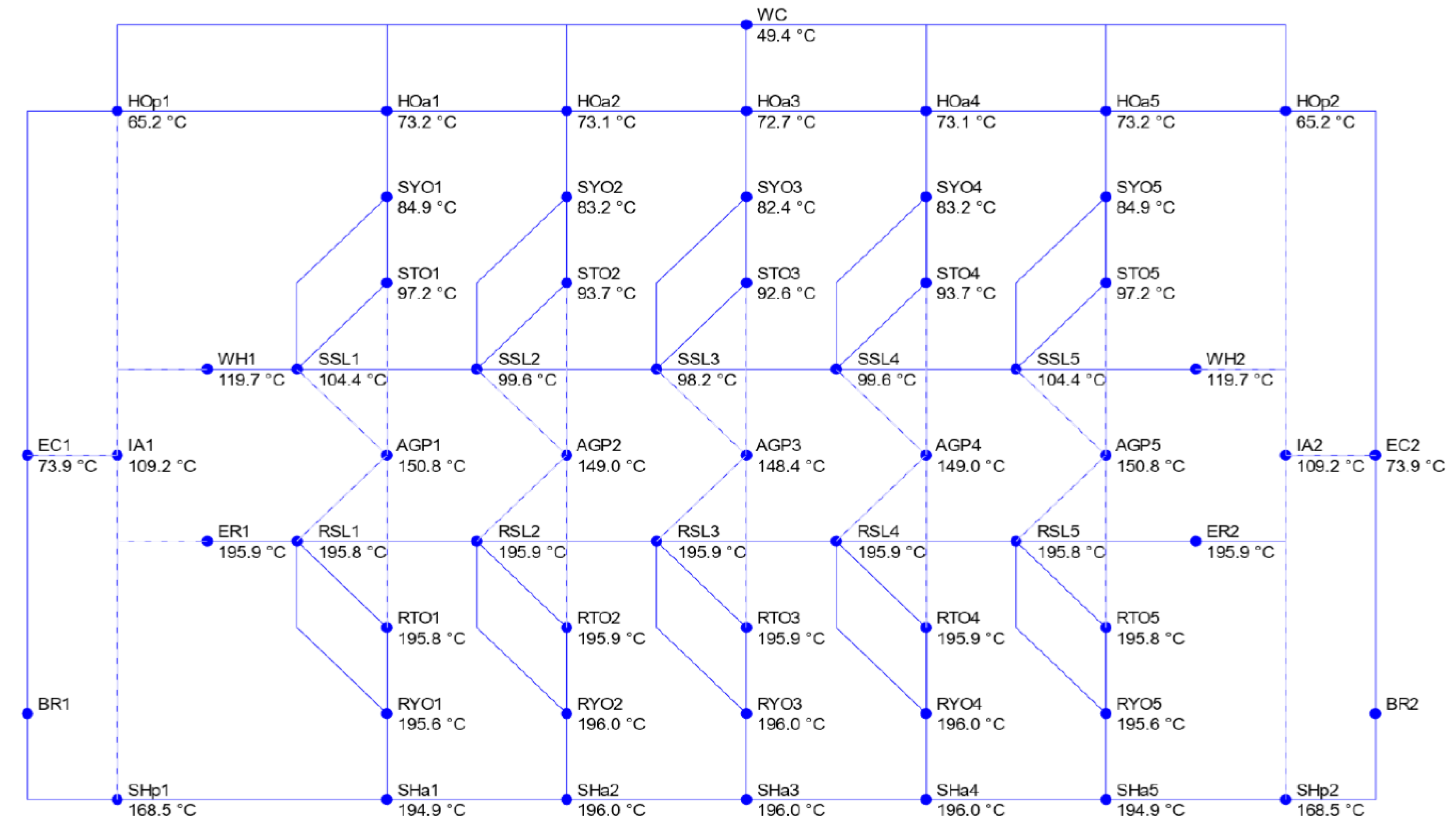
4.1. Thermal Model
4.2. Vehicle Model
5. Results and Discussion
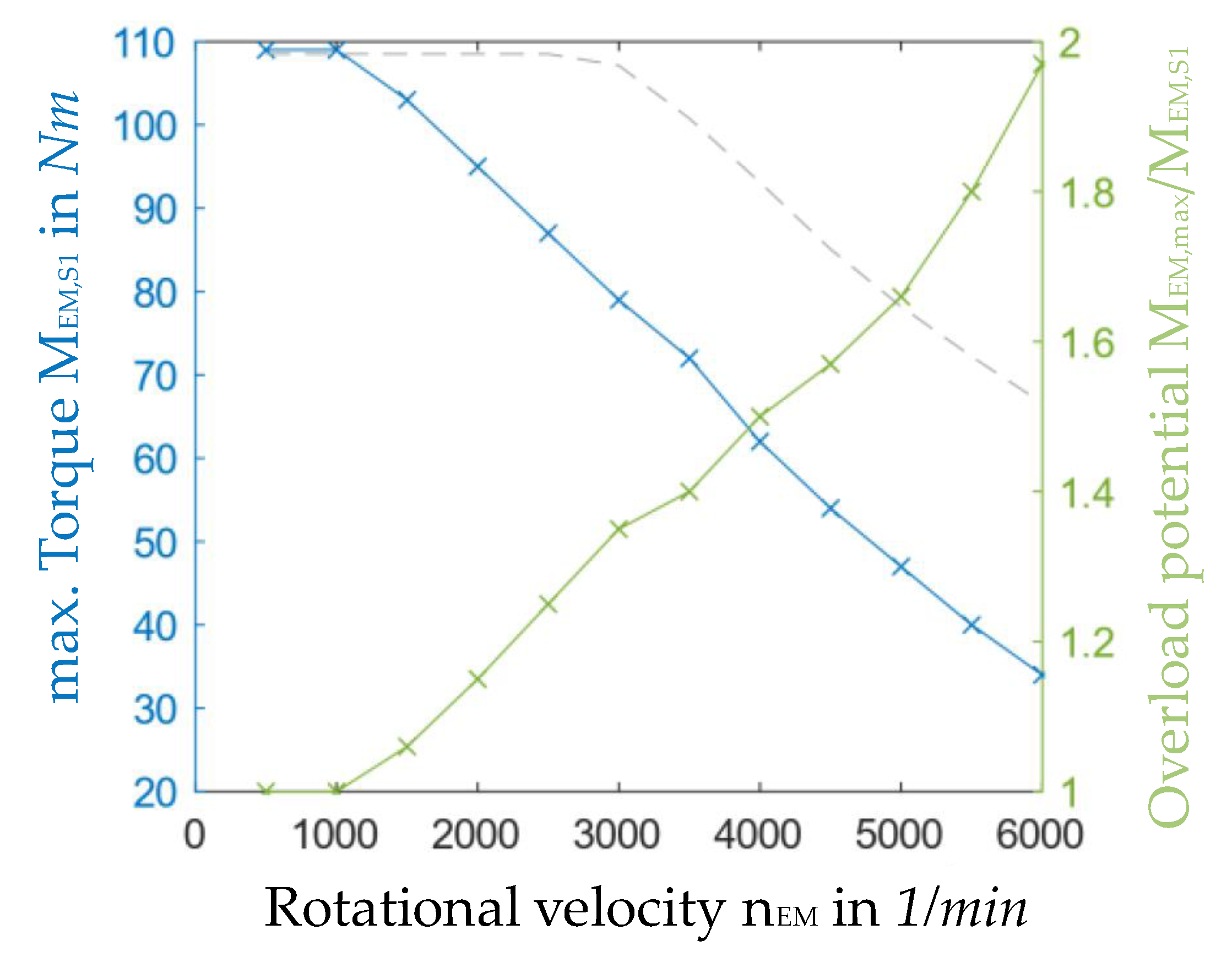
5.1. Overload Potential of Regarded IM
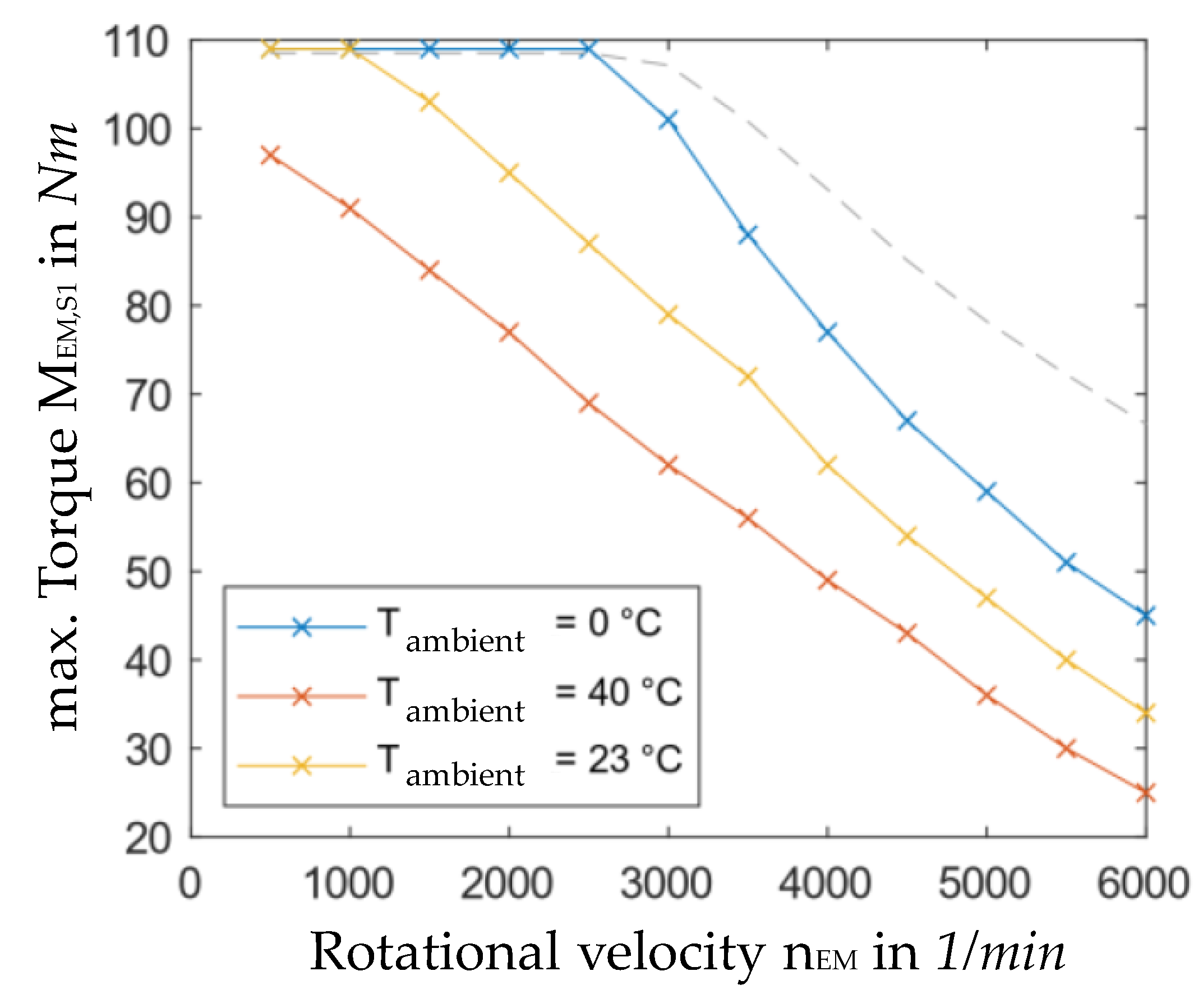
5.2. Effect of Ambient Temperature on Thermal Behavior of Machine
5.3. Effect of Thermal Behavior
6. Summary and Outlook
Author Contributions
Funding
Conflicts of Interest
Open-Source
References
- Mähler, C. Batterien in Elektroautos: Aktueller Stand und Perspektiven. Available online: https://www.stromschnell.de/technik/batterien-in-elektroautos-aktueller-stand-und-perspektiven_5123204_ 5093776.html (accessed on 10 October 2019).
- Roeder, S. Zweigang-Automatik von ZF Sorgt für Mehr Reichweite. Available online: https://www.autogazette.de/zf/getriebe/elektro/zweigang-automatik-von-zf-sorgt-fuer-mehr-reichweite-989396271.html (accessed on 10 October 2019).
- Automobilkonstruktion, K.E.M. Getriebe Haben Auch im E-Fahrzeug Eine Zukunft. Available online: https://automobilkonstruktion.industrie.de/alternative-antriebe/getriebe-haben-auch-im-e-fahrzeug-eine-zukunft/ (accessed on 10 October 2019).
- Horlbeck, L. Auslegung Elektrischer Maschinen für Automobile Antriebsstränge unter Berücksichtigung des Überlastpotentials. Ph.D. Thesis, Institute of Automotive Technology, Technical University of Munich, München, Germany, 2018. [Google Scholar]
- Bolvashenkov, I.; Herzog, H.-G. Approach to predictive evaluation of the reliability of electric drive train based on a stochastic model. In Proceedings of the 2015 International Conference on Clean Electrical Power (ICCEP), Taormina, Italy, 16–18 June 2015; pp. 486–492. [Google Scholar]
- Auinger, H. Determination and designation of the efficiency of electrical machines. Power Eng. J. 1999, 13, 15–23. [Google Scholar] [CrossRef]
- Kalt, S.; Erhard, J.; Danquah, B.; Lienkamp, M. Electric Machine Design Tool for Permanent Magnet Synchronous Machines. In Proceedings of the 2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 8–10 May 2019. [Google Scholar]
- Hombitzer, M.; Franck, D.; von Pfingsten, G.; Hameyer, K. Permanentmagneterregter Traktionsantrieb für ein Elektrofahrzeug: Bauraum, Wirkungsgrad und Kosten—Das Auslegungsdreieck. In Elektrische Antriebstechnologie für Hybrid- und Elektrofahrzeuge: Das Kostenoptimale Elektrische Antriebssystem, Mitentscheidend für den Markterfolg; Expert Verlag: Renningen, Germany, 2014. [Google Scholar]
- Doerr, J.; Attensperger, T.; Wittmann, L.; Enzinger, T. Die neuen elektrischen Achsantriebe von Audi. MTZ Motortech. Z. 2018, 79, 16–25. [Google Scholar] [CrossRef]
- Knoblauch, D. Elektrische Maschine mit gekühlter Rotorwelle. Patent DE102013104711A1, November 2014. [Google Scholar]
- Kresser, T. E-Motor mit Direktkühlung: Mehr Leistung, Weniger Verschleiß. Available online: https://www.ingenieur.de/technik/fachbereiche/e-mobilitaet/e-motor-mit-direktkuehlung-mehr-leistung-weniger-verschleiss/ (accessed on 20 October 2019).
- Pyrhonen, J.; Jokinen, T.; Hrabovcová, V. Design of Rotating Electrical Machines; Wiley: Chichester, UK, 2014. [Google Scholar]
- Fräger, C. Formelsammlung Elektrische Antriebe; Springer: Hannover, Germany, 2017. [Google Scholar]
- Müller, G.; Vogt, K.; Ponick, B. Berechnung Elektrischer Maschinen, 6th ed.; WILEY-VCH: Weinheim, Germany, 2008. [Google Scholar]
- Saari, J. Thermal Modelling of High Speed Induction Machines; Finnish Acad. of Technology: Helsinki, Finland, 1995. [Google Scholar]
- Schutzhold, J.; Hofmann, W. Analysis of the temperature dependence of losses in electrical machines. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 3159–3165. [Google Scholar]
- Wallscheid, O.; Böcker, J. Global identification of a low-order lumped-parameter thermal network for permanent magnet synchronous motors. IEEE Trans. Energy Convers. 2015, 31, 354–365. [Google Scholar] [CrossRef]
- Pischinger, S.; Seiffert, U. Vieweg Handbuch Kraftfahrzeugtechnik; Springer: Wiesbaden, Germany; Fachmedien: Wiesbaden, Germany, 2016. [Google Scholar]
- Görke, D. Untersuchungen zur Kraftstoffoptimalen Betriebsweise von Parallelhybridfahrzeugen und Darauf Basierende Auslegung Regelbasierter Betriebsstrategien; Springer: Wiesbaden, Germany; Fachmedien: Wiesbaden, Germany, 2016. [Google Scholar]
- UNECE. Sustainable Development Goals, Proposal for Amendment 5 to Global Technical Regulation No. 15 (Worldwide Harmonized Light Vehicles Test Procedures (WLTP)): ECE/TRANS/WP.29/GRPE/2019/2, Report. 2018. [Google Scholar]
- Reiter, C.; Wassiliadis, N. NEmo—Nutzerorientierte Elektromobilität. Available online: https://www.ftm.mw.tum.de/nemo/ (accessed on 1 August 2019).
- Adermann, J. FORELMO Smart Dokumentation; Institute of Automotive Technology, Technical University of Munich: Munich, Germany, 2016. [Google Scholar]
- DriverSide. Technical Specifications 2013 Smart fortwo Passion Coupe. Available online: https://www.driverside.com/specs/smart-fortwo-2013-30980-54223-0 (accessed on 15 October 2019).
- Otto, S. Zubehör: Felgen. Available online: https://www.smart-roadster-club.de/download/Zubehoer Felgen.pdf (accessed on 10 October 2019).
- Oechslen, S. Thermische Modellierung Elektrischer Hochleistungsantriebe; Springer: Wiesbaden, Germany; Fachmedien: Wiesbaden, Germany, 2018. [Google Scholar]
- Kral, C.; Haumer, A.; Bäuml, T. Thermal model and behavior of a totally-enclosed-water-cooled squirrel-cage induction machine for traction applications. IEEE Trans. Ind. Electron. 2008, 55, 3555–3565. [Google Scholar] [CrossRef]
- Boglietti, A.; Cavagnino, A.; Staton, D.; Shanel, M.; Mueller, M.; Mejuto, C. Evolution and modern approaches for thermal analysis of electrical machines. IEEE Trans. Ind. Electron. 2009, 56, 871–882. [Google Scholar] [CrossRef]
- Gieras, J.F. Advancements in Electric Machines; Springer: Dordrecht, The Netherlands, 2008. [Google Scholar]
- Jürgens, G. Vergleich von Getriebesysteme. In Proceedings of the LuK-Kolloquium; Schaeffler Automotive Buehl GmbH & Co. KG: Bühl, Germany, 1994; p. 149. [Google Scholar]
- Verein Deutscher Ingenieure. VDI-Wärmeatlas; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- SKF GmbH. SKF Schmierfett-Auswahltafel. Available online: https://www.ludwigmeister.de/content/techn-informationen/chemische-produkte/schmiermittel/skf_waelzlager-schmierstoffe.pdf (accessed on 10 October 2019).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Variable | Value | Unit | Source |
|---|---|---|---|---|
| Vehicle mass (+ load) | mveh | 825 (+80) | kg | [22] |
| Frontal area | Afront | 2.00 | m2 | [22] |
| Drag coefficient | cW | 0.37 | - | [22] |
| Rolling resistance coefficient | fR | 0.013 | - | [18] |
| Dynamic tire radius | rdyn | 0.2774 | m | [22] |
| Static tire radius | rstat | 0.2870 | m | [22] |
| Gear ratio machine – tire | iEM-T | 5,697 | - | [23] |
| Front wheel mass (rim + tires) | mFR | 14.7 | kg | [24] |
| Back wheel mass (rim + tires) | mBR | 15.6 | kg | [24] |
| Parameter | Value |
|---|---|
| Number of measured test drives | 52 |
| Total driving time | 952 min |
| Average driving time | 18 min |
| Shortest/longest trip | 1 min 24 s/125 min |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalt, S.; Stolle, K.L.; Neuhaus, P.; Herrmann, T.; Koch, A.; Lienkamp, M. Dependency of Machine Efficiency on the Thermal Behavior of Induction Machines. Machines 2020, 8, 9. https://doi.org/10.3390/machines8010009
Kalt S, Stolle KL, Neuhaus P, Herrmann T, Koch A, Lienkamp M. Dependency of Machine Efficiency on the Thermal Behavior of Induction Machines. Machines. 2020; 8(1):9. https://doi.org/10.3390/machines8010009
Chicago/Turabian StyleKalt, Svenja, Karl Ludwig Stolle, Philipp Neuhaus, Thomas Herrmann, Alexander Koch, and Markus Lienkamp. 2020. "Dependency of Machine Efficiency on the Thermal Behavior of Induction Machines" Machines 8, no. 1: 9. https://doi.org/10.3390/machines8010009
APA StyleKalt, S., Stolle, K. L., Neuhaus, P., Herrmann, T., Koch, A., & Lienkamp, M. (2020). Dependency of Machine Efficiency on the Thermal Behavior of Induction Machines. Machines, 8(1), 9. https://doi.org/10.3390/machines8010009