1. Introduction
The practical systems that occur in nature are mostly represented by higher order mathematical models. The analysis required for these large-scale systems to design and implement a controller is cumbersome because the controller design methods yield controllers of order at least equal to the original system, if not greater. Model order reduction (MOR) techniques simplify this problem by constructing a reduced order model (ROM), which enables a reduced order controller design for higher order plants that is practically feasible for implementation [
1].
Moore [
2] presented a MOR technique based on an internally balanced state-space realization of the full order model (FOM). The controllability and observability gramians of a balanced state-space realization are equal and diagonal. Each state in a balanced realization is equally controllable and observable. The ROM in balanced truncation is then obtained by discarding the weakly controllable and observable states. Balanced realization only exists if the original FOM is stable and minimal. For non-minimal systems or even systems with nearly uncontrollable or unobservable states, the computation of balanced realization suffers ill-conditioning [
3,
4]. Resultantly, the approximation error in balanced truncation is increased if the system is close to non-minimality. This numerical difficulty in balanced truncation can be avoided by using a balancing free algorithm [
4] based on Schur-decomposition, which does not require the original system to be minimal and constructs an approximate balanced-realization of FOM.
The cross-gramian has been the focus of many researchers in MOR and system theory for large-scale systems where computational complexity and simulation time is a challenge. Since its inception by Fernando and Nicholsen [
5], for stable single-input-single-output (SISO) systems, many questions arose for its applicability towards practical systems, which may be multi-input-multi-output (MIMO) (symmetric and non-symmetric), and/or even unstable systems. This has opened new avenues for the calculation of a more general cross-gramian. Laub, Silverman, and Verma [
6] and Fernando [
7] extended the cross-gramian for symmetric MIMO systems. The cross-gramian introduced in [
6,
7] can only be computed for symmetric systems. The property that makes cross-gramian useful in MOR is that it contains conjoined information of both controllability and observability gramian. Thus, two Lyapunov Equations that define the controllability and observability gramians can be replaced with a single Sylvester Equation and thus the computational cost can significantly be reduced [
8]. There also exists some methods in the literature that expand the scope of cross-gramian to non-symmetric systems such as [
9,
10,
11,
12]. Aldhaheri in Reference [
13] presented a cross-gramian-based algorithm for finding Moore’s balanced realization [
2] ROM, which does not require the original system to be minimal. However, this algorithm is restricted to SISO and symmetric MIMO systems.
Generally, two approaches are used to design a lower order controller for a full order plant: Plant reduction and compensator reduction [
14]. In plant reduction, an ROM of the original full order plant is obtained using MOR techniques such that if a lower order controller is designed for the reduced plant, it satisfies the closed-loop performance criteria with the full order plant. In compensator reduction, first, a higher order controller is designed for the full order plant and then MOR is applied to obtain a reduced order controller which satisfies the closed-loop performance criteria with the original plant. The compensator reduction approach is more accurate than the plant reduction approach, and hence it is preferred [
15]. Plant reduction requires some knowledge of the controller to be designed in advance for its implementation. Since the approximation is done before the controller design, its accuracy is inferior to compensator reduction, wherein both the plant and controller are known before the reduction. However, in situations where it is difficult or impossible to design a controller for a high order plant beforehand, plant reduction is a good design tool. Despite the importance of plant reduction, it has been mostly ignored in the control system literature. In power system literature, it is customary to reduce the plant before designing a damping controller to mitigate inter-area oscillations, however, most of the researchers completely ignore the closed-loop performance in the reduction process; see References [
16,
17,
18] for an instance. This is against the motivation of both the plant and compensator reduction as a lower order controller cannot be obtained by simply picking any MOR technique and applying it to the plant/controller. A MOR technique that incorporates the closed-loop performance in its reduction criteria is feasible for the plant/compensator reduction.
Various closed-loop performance criteria can be written as frequency-weighted approximation criteria. Enns in [
19] generalized Moore’s balanced truncation [
2] and presented frequency-weighted balanced truncation (FWBT) by introducing frequency weights which ensures the accuracy of ROM over the frequency range emphasized by the frequency weights. FWBT can thus be used for both plant and compensator reduction problems. Later, Zulfiqar proposed a frequency-weighted cross-gramian based FWBT algorithm for SISO system in Reference [
8]. This algorithm is applicable to non-minimal systems as well. A common issue in plant/compensator reduction is that frequency weights, which define the closed-loop performance criteria, become unstable if the plant has transmission zeros in the right half of the s-plane. Both the algorithms of FWBT in References [
19] and [
8] only work if both the plant and the frequency weights are stable. This limits their applicability to many plant/compensator reduction problems.
As mentioned earlier, plant reduction did not get its due coverage in the literature despite being an important problem. Recently, a cross-gramian -based plant reduction algorithm is presented in Reference [
20], which is less computational than Enns’ plant reduction algorithm (EPRA) [
19]. The algorithm has also shown quicker convergence than Reference [
19] and it is less prone to ill-conditioning due to the use of cross-gramian for the reasons discussed earlier in this section. This algorithm, however, is only applicable to stable SISO systems. In this paper, we generalize this algorithm to extend its applicability to a wide range of systems. We propose a unifying framework that extends the applicability of the algorithm in Reference [
20] to the stable, unstable, symmetric, and non-symmetric MIMO systems. The unifying framework is based on the developments made in the literature to extend the definition of cross-gramian for non-symmetric MIMO systems and unstable systems. We generalize the definition of frequency-weighted cross-gramian given in Reference [
8] to include the aforementioned classes of systems.
The paper is organized as follows.
Section 2 provides the necessary background and survey of the cross-gramian, frequency-weighted model reduction, and controller reduction problem.
Section 3 presents the main results of the paper.
Section 4 shows the experimental results and comparisons.
Section 5 discusses the results obtained, whereas
Section 6 concludes the paper.
3. Main Work
In this section, we present a plant reduction algorithm based on the frequency-weighted cross-gramian. A brief version of this algorithm appeared in [
20] wherein it was only applicable to SISO systems that are stable. In this paper, we present a unifying framework to extend the applicability of the algorithm to unstable and/or non-symmetric systems. The proposed plant reduction algorithm is also an iterative algorithm like EPRA [
19], but it converges faster than EPRA. The proposed algorithm is less computational as it uses cross-gramian based FWMOR instead of FWBT. It is also computationally more stable as cross-gramian based FWMOR is less prone to ill-conditioning particularly when the system is non-minimal or nearly non-minimal. Moreover, the proposed algorithm can also handle unstable plants. Since the compensator reduction is more accurate than the plant reduction, we propose to reduce the order of plant in the plant reduction only to an extent that the controller design package can easily handle this reduced plant. The controller obtained may still be of a high order, but this can be further reduced with much accurate compensator reduction. It is evident from the simulation results in
Section 4 that the controller obtained with this hybrid approach yields a better loop shape despite being compact.
Consider a stable realization of the full order plant of order
where
. The objective is to find a controller
of order
such that some closed-loop performance criterion with
is achieved. Let
be an
order ROM of the full order plant
such that
is low enough for the controller design package to handle. Let
be a stabilizing controller designed for
and the closed-loop TF with
and
is given by
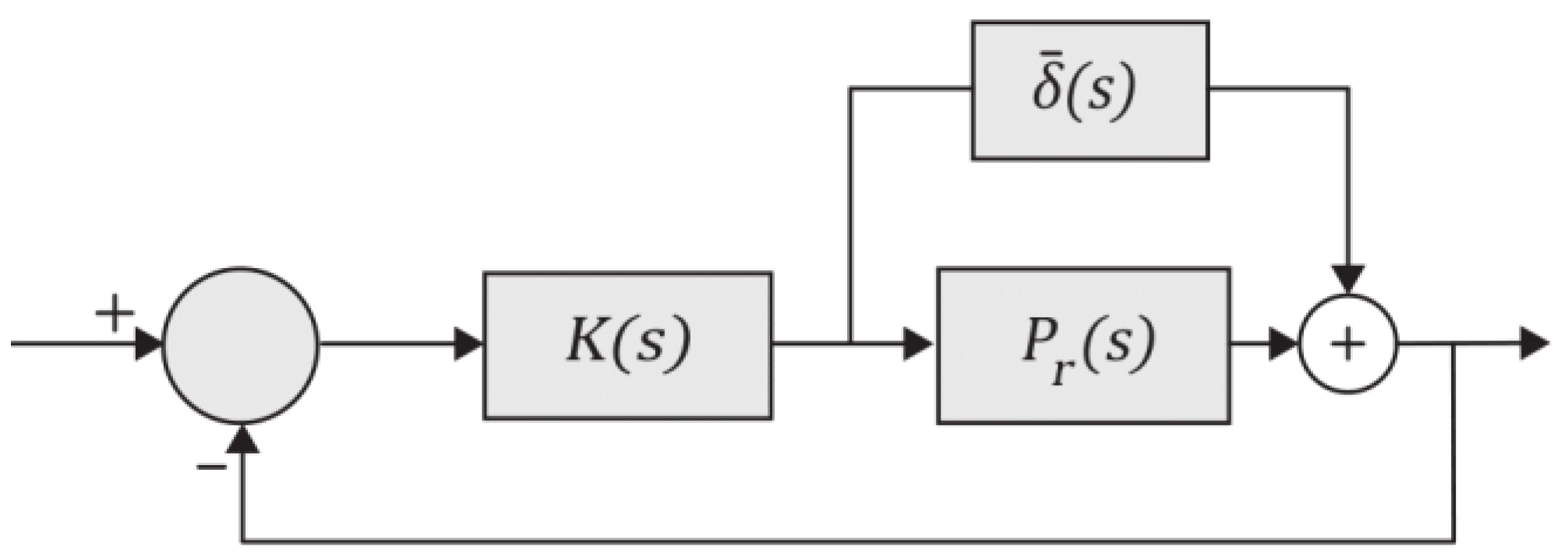
The closed-loop system
with
and
can be represented as in
Figure 1 where
and
According to the stability robustness theorem [
14],
is also a stabilizing controller for
if either
or
is satisfied, i.e.,
or
It is evident from
and
that plant reduction is a FWMOR problem, i.e.,
with the following frequency weights
respectively. Since
and
depend both on
and
which are not known a priori, some mathematical manipulation is required to incorporate them in the approximation criteria of MOR procedure. The loop shaping controller design procedures help in removing the dependence on
because the loop TF
or
is known a priori, i.e.,
or
. Consider
first, and
can be done similarly by analogy. Let the desired closed-loop TF for the loop shaping be
.
can be represented independently of
as
.
The weight
still depends on
which is not known a priori, and thus the plant reduction problem under consideration becomes an iterative problem.
is initialized with
initially and the reduced plant is obtained using cross-gramian based FWMOR. If
has transmission zeros in the right half of the s-plane,
becomes unstable, and the frequency-weighted cross-gramian cannot be computed for
even if
is a SISO system. Similarly, if
is unstable, the frequency-weighted cross-gramian cannot be computed for
even if
is a SISO system. Inspired by References [
22] and [
23], we generalize the computation of frequency-weighted gramians for unstable systems. Let the state-space realizations of
and
be
If
is stabilizable, a symmetric matrix
exists which solve the following Riccati Equation
can be partitioned according to
, i.e.,
Define
and
as
when
and
are Hurwitz,
is Hurwitz and
. However, when
and/or
are not Hurwitz,
is not Hurwitz, but
is Hurwitz. Now there can be two cases, i.e., either
is a symmetric or a non-symmetric system. If
is a symmetric system, the frequency-weighted cross-gramian
for the realization
of
can be computed by solving the following Sylvester Equation
where
is the block of (25) corresponding to
.
If
is a non-symmetric system, the frequency-weighted cross-gramian can be obtained by either using the symmetrizer based approach of [
10,
11] or decentralized control based approach of [
12]. Consider the symmetrizer-based approach first and let the eigenvalue decomposition of
be
. Then, the frequency-weighted cross-gramian
for the realization
of
can be computed by solving the following Sylvester Equation
where
and
If
is not diagonalizable, the above-mentioned approach may not work. In that case, the decentralized control-based approach can be used to obtain the frequency-weighted cross-gramian
, which solves the following Sylvester Equation
where
and
are the sums of the columns and rows of
and
, respectively.
Let
be the transformation matrix, which diagonalizes
such that eigenvalues are arranged according to their magnitude in descending order on the principal diagonal, i.e.,
where
is an
matrix and
is an
matrix.
and
can be partitioned as follows, i.e.,
The ROM
of
can be computed as
where
such that
.
If , then is the desired ROM of the plant. If not, then is set as and the above process is repeated. may become unbounded if the plant and/or weight are unstable. In that case, should be decomposed into stable and unstable part using additive decomposition, and is checked using its stable part. Once is obtained which ensures that , a controller is designed for using any loop shaping procedure such that the loop shape i.e., is achieved. thus achieved is a stabilizing controller for both and .
A
order ROM
of
can be found such that
has the same number of poles in the open right half plane as
and
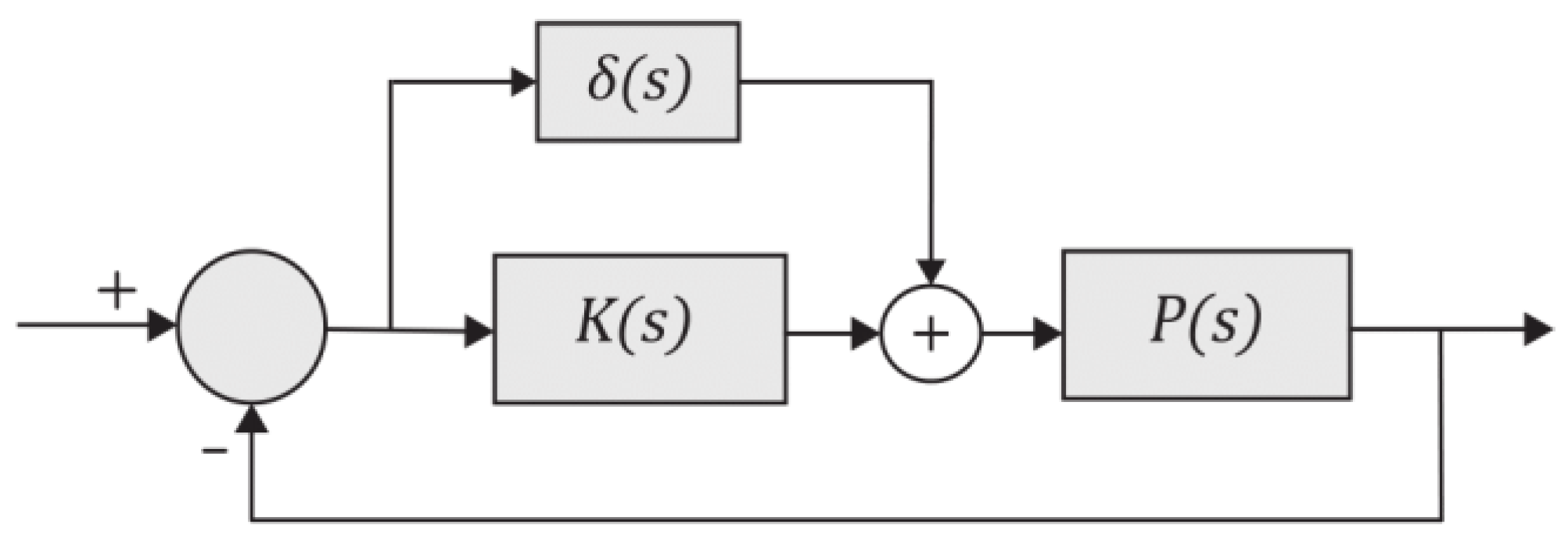
is bounded on the imaginary axis. The closed-loop system
with
and
is shown in
Figure 2 where
and
is also a stabilizing controller for
if
where
Again, the compensator reduction is a FWMOR problem, and thus
can be reduced using cross-gramian -based FWMOR. Let’s take
first, and
can be achieved on similar lines by analogy. Let
and
be represented as the following state-space realizations, i.e.,
respectively. The augmented system is defined by
If
is a symmetric system, its cross-gramian
solves the following Sylvester Equation
can be partitioned according to
, and the frequency-weighted
can be extracted from
as the block corressponding to
in
i.e.,
moreover,
solves the following Sylvester Equations
Again, if
is a non-symmetric system, the frequency-weighted cross-gramian can be obtained by either using the symmetrizer based approach of [
10,
11] or decentralized control based approach of [
12]. Consider the symmetrizer-based approach first and let the eigenvalue decomposition of
be
. Then the frequency-weighted cross-gramian
for the realization
of
can be computed by solving the following Sylvester Equation
where
and
.
If
is not diagonalizable, the above-mentioned approach may not work. In that case, the decentralized control-based approach can be used to obtain the frequency-weighted cross-gramian
, which solves the following Sylvester Equation
where
and
are the sums of the columns and rows of
and
, respectively.
Let
be the transformation matrix, which diagonalizes
such that eigenvalues are arranged according to their magnitude in descending order on the principal diagonal, i.e.,
where
is an
matrix.
and
can be partitioned as follows:
The ROM
of
can be computed as
where
The proposed approach is summarized in Algorithm 1.
| Algorithm 1: Proposed Technique |
| Input: and . |
| Output: |
| 1: Select the desired loop TF such that has a high gain in the low-frequency region wherein disturbance attenuation is required, and a small gain in the high-frequency region wherein uncertainties in the plant are present. |
| 2: The desired closed-loop is . |
| 3: Initialize as . |
| 4: while , do set . |
| 5: Construct the augmented system from Equation (22). |
| 6: Compute from Equation (23). |
| 7: Compute from Equation (24). |
| 8: If is a SISO system, compute from Equation (25). |
| 9: If is a MIMO system, compute from Equations (26) or (27). |
| 10: Transform into ordered real Schur form i.e., |
| where is an matrix. |
| 11: Calculate the matrix by solving the following Sylvester Equation |
| . |
| 12: block diagonalises into . |
| 13: can be partitioned as . |
| 14: and . |
| 15: Compute using Equation (29). |
| 16: end while |
| 17: Design using any loop shaping technique such that the loop shape is achieved. |
| 18: If is a SISO system, compute from Equations (31), (32). |
| 19: If is a MIMO system, compute from Equation (33) or (34). |
| 20: Transform into ordered real Schur form |
|
| where is an matrix. |
| 21: Calculate the matrix by solving the following Sylvester Equation |
|
| 22: block diagonalizes into . |
| 23: can be partitioned as . |
| 24: and . |
| 25: Compute using Equation (36) such that . |
5. Discussion
Table 1 and
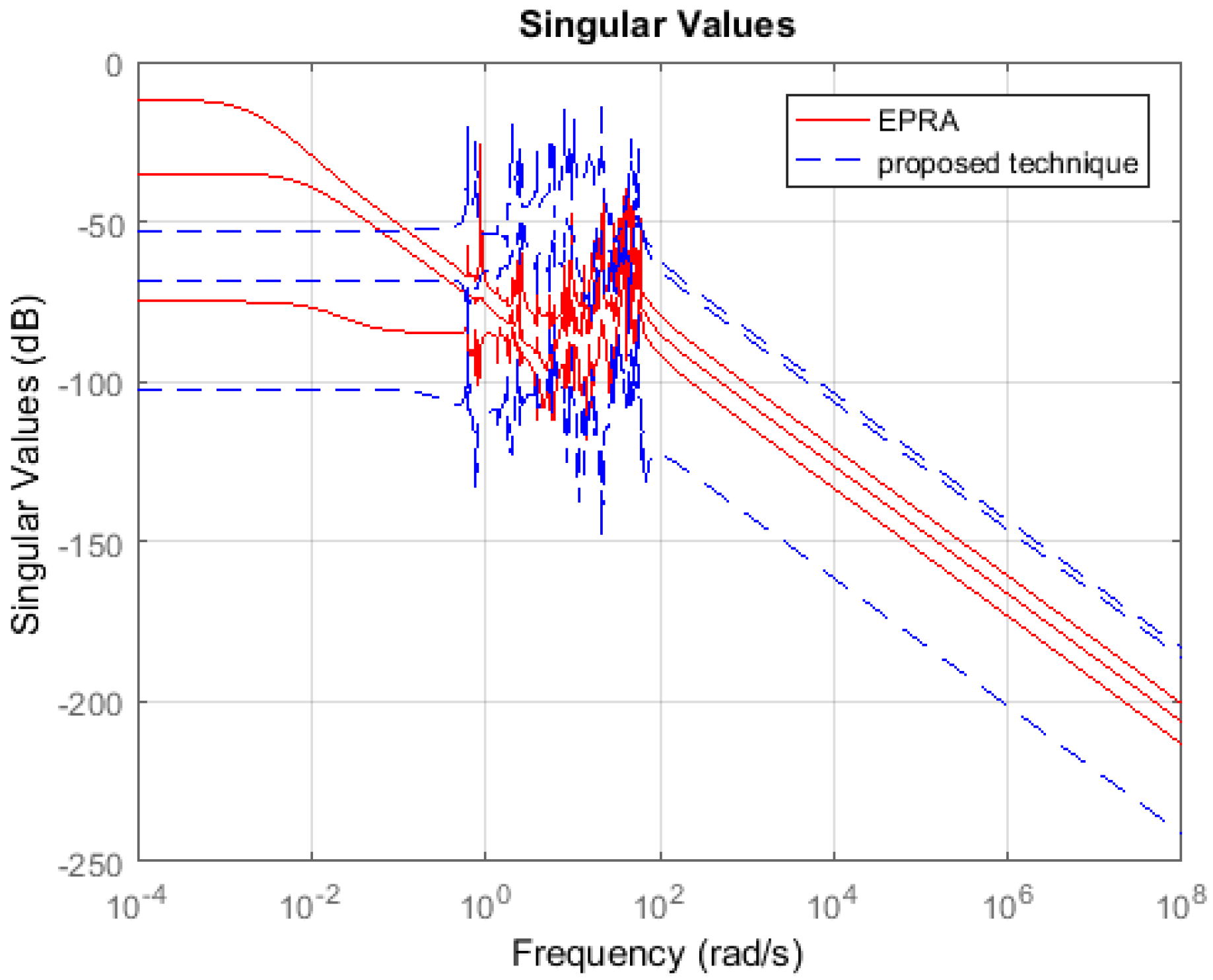
Table 2 show that the proposed algorithm is not only more accurate but also computationally efficient than EPRA. It can be seen from
Figure 3 that the proposed technique is more accurate in the low and medium frequency region wherein the crossover frequencies lie.
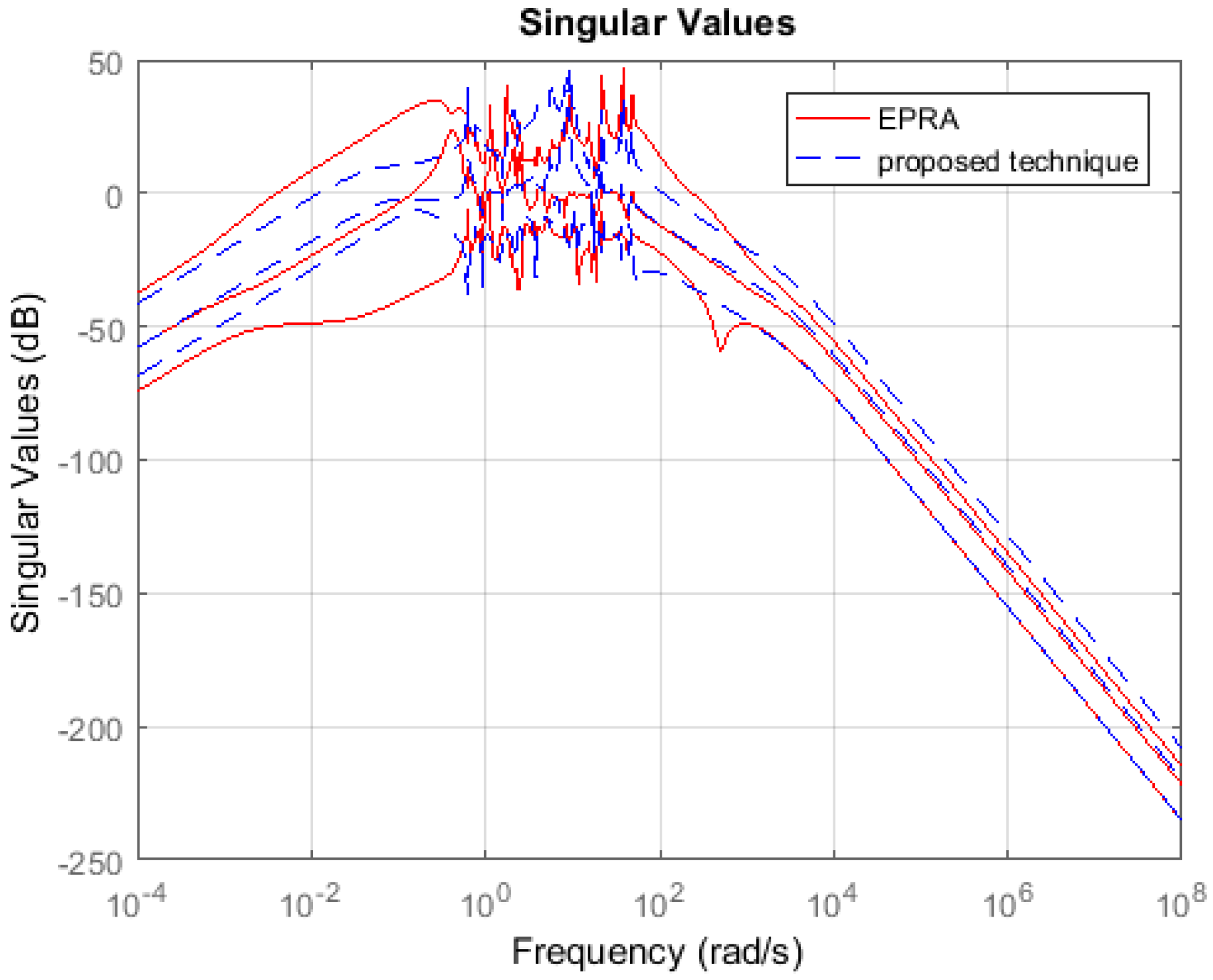
Figure 4 shows that the loop shape obtained for the 14th order controller using the proposed technique is similar to EPRA if not better. Additionally, it can be observed from
Figure 6 that the controller obtained using the proposed algorithm exhibits a superior loop shape and good performance characteristics than EPRA despite being compact. In Example 2, the error yielded by the proposed technique is slightly more than EPRA, but still maintains its computational efficiency.
Figure 7 shows the error comparison plot of the weighted error.
Figure 8 shows that the loop shape obtained using the proposed technique is similar to EPRA if not better. A 20th order reduced controller
is obtained for Example 2 using EPRA and proposed technique and the loop shape is shown in
Figure 10. The weighted error
is
(as shown in
Table 2), but still, a stabilizing controller is obtained where all the poles of the closed-loop system lie in the left half of s-plane. This is due to the fact that the satisfaction of criteria
is a sufficient and not necessary condition for closed-loop stability. Analysis shows that if
of order 184 is designed instead of 20 then the resulting stabilizing controllers obtained for EPRA and the proposed technique yield the weighted error
84.6631 and
0.1378 respectively.
drastically increases after that, and the sufficient condition is not met. Since 184 is still a high order controller, we reduced the controller to 20th order and included the results for this controller. The performance of the reduced controller can be observed by the error analysis in
Figure 5 and
Figure 9, and it can be noted that the desired loop shape is acceptable. In Example 3, it is interesting to note that EPRA is not applicable, since the solution of standard Lyapunov Equations are not possible. However, by using the proposed technique, not only a stabilizing controller is obtained for the unstable plant, but also a much reduced/compact controller can be designed which preserves the closed-loop stability and performance criteria with the full order plant.
Figure 11 and
Figure 12 show the loop shape obtained using the proposed technique, and it can be noted that the loop gain is high in the low and medium frequency ranges.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}