
Performance of Magnetic-Superconductor Non-Contact Harmonic Drive for Cryogenic Space Applications

 , ,
, ,  ,
,
Abstract
:
1. Introduction
2. Design and Analysis of the Device
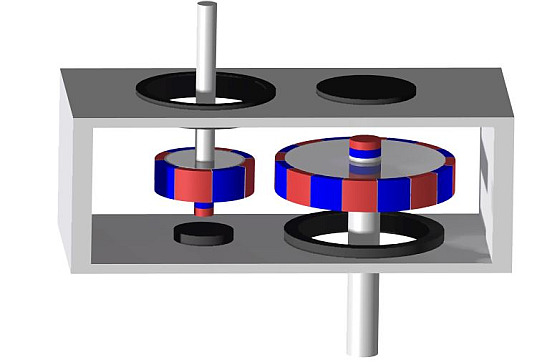
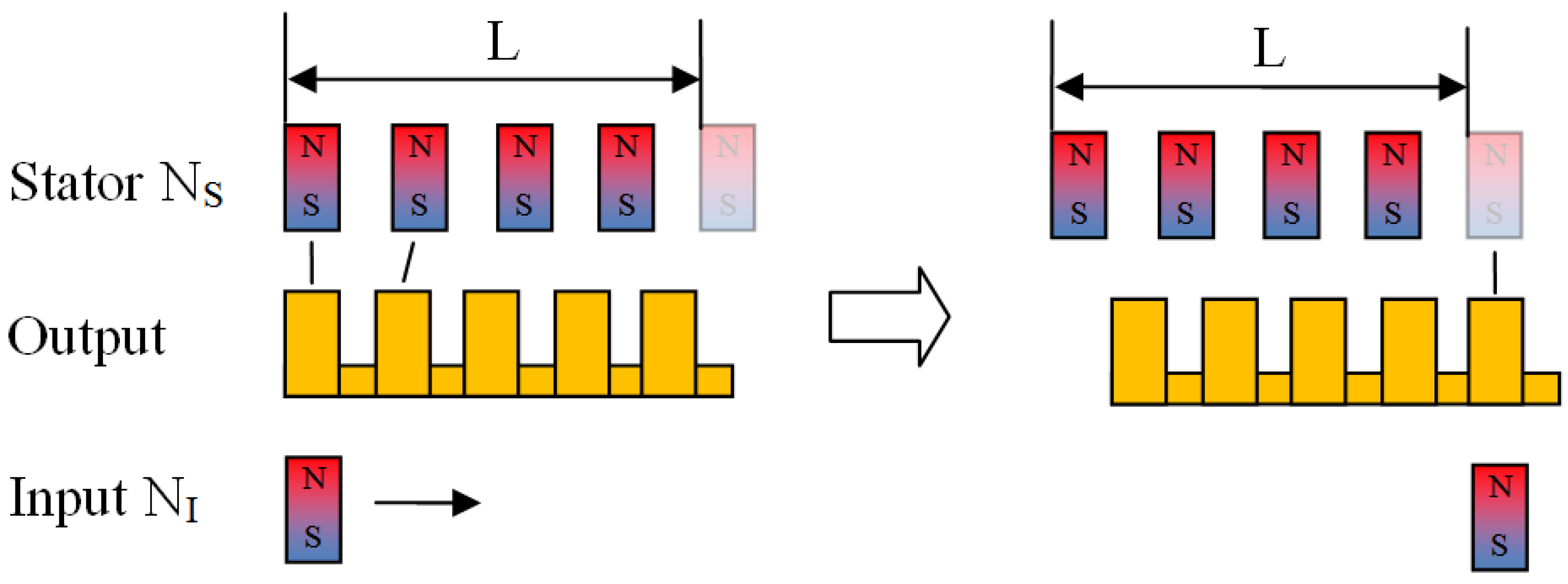
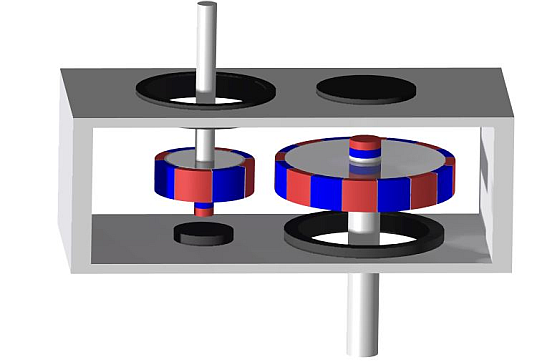
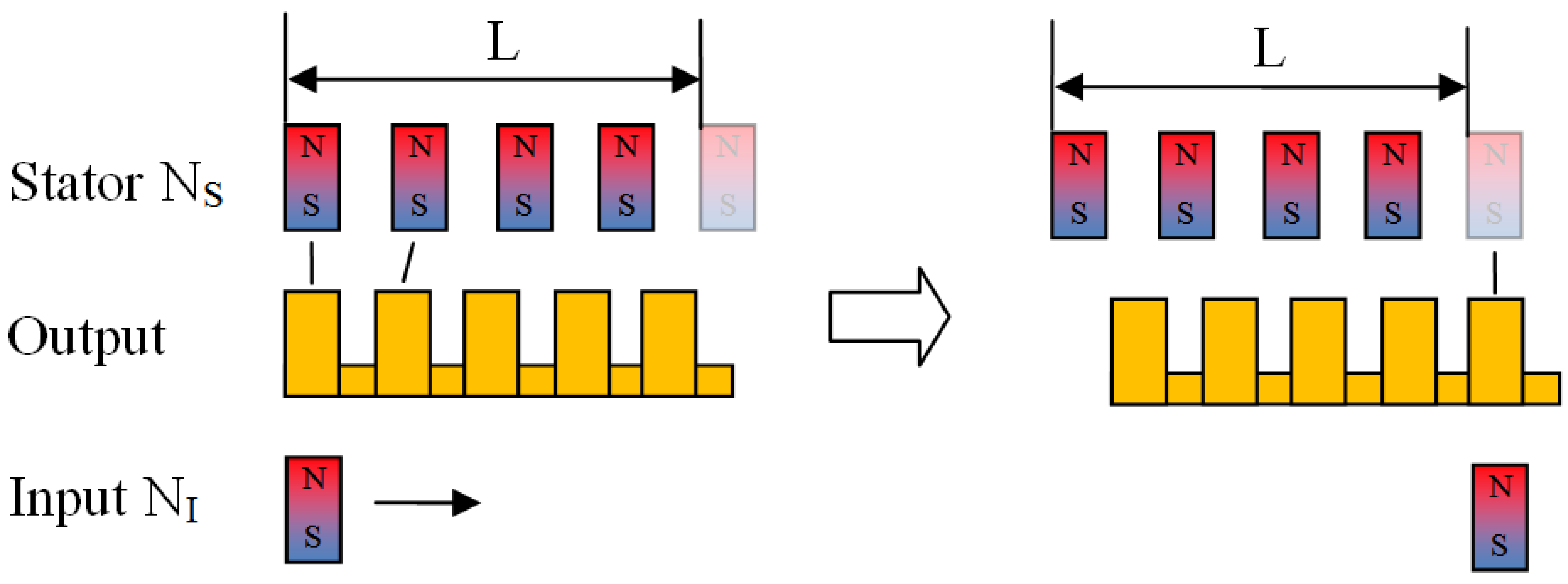
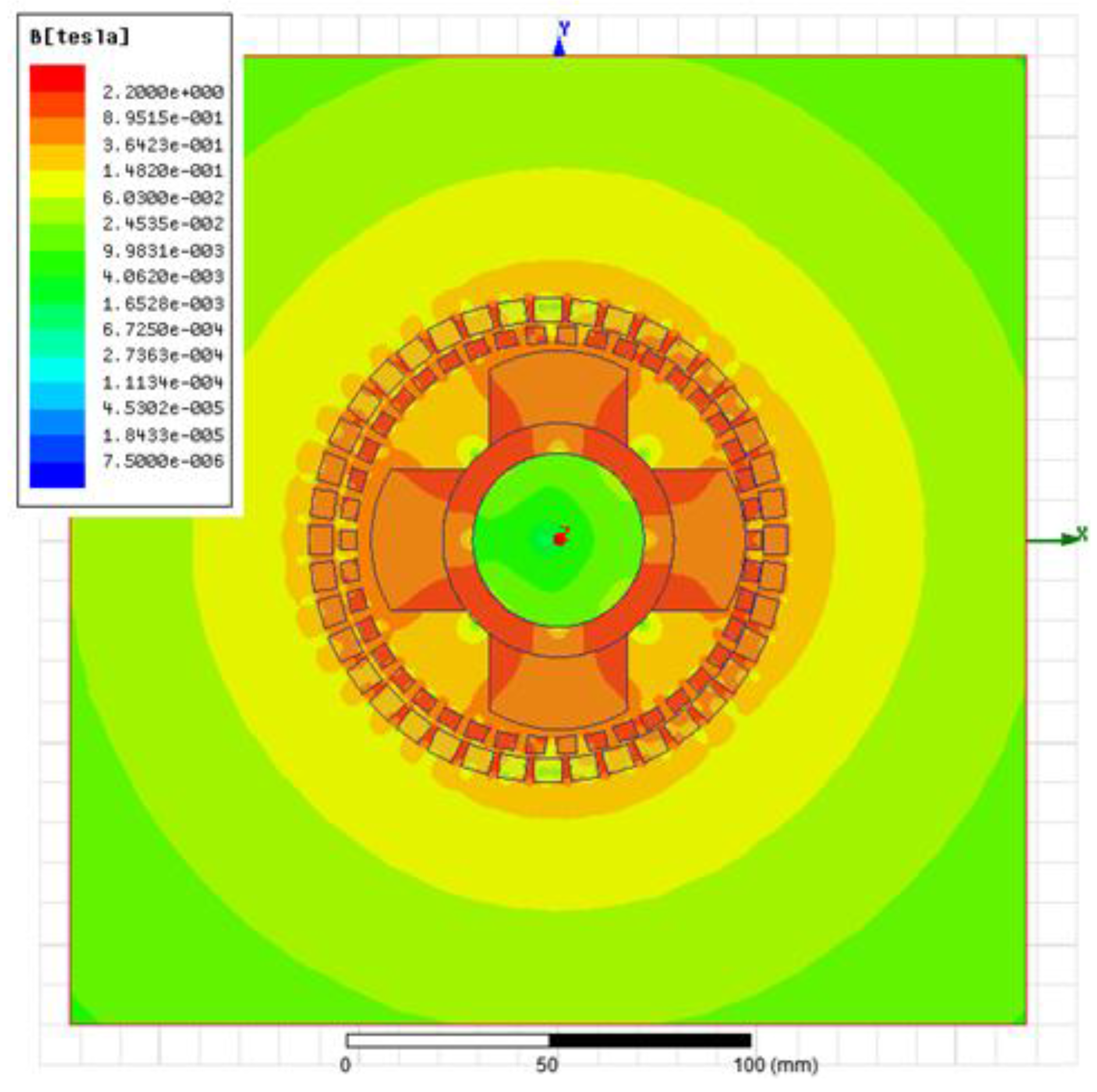
2.1. Magnetic Harmonic Drive Gear

2.2. Superconducting Magnetic Bearings (SMB)
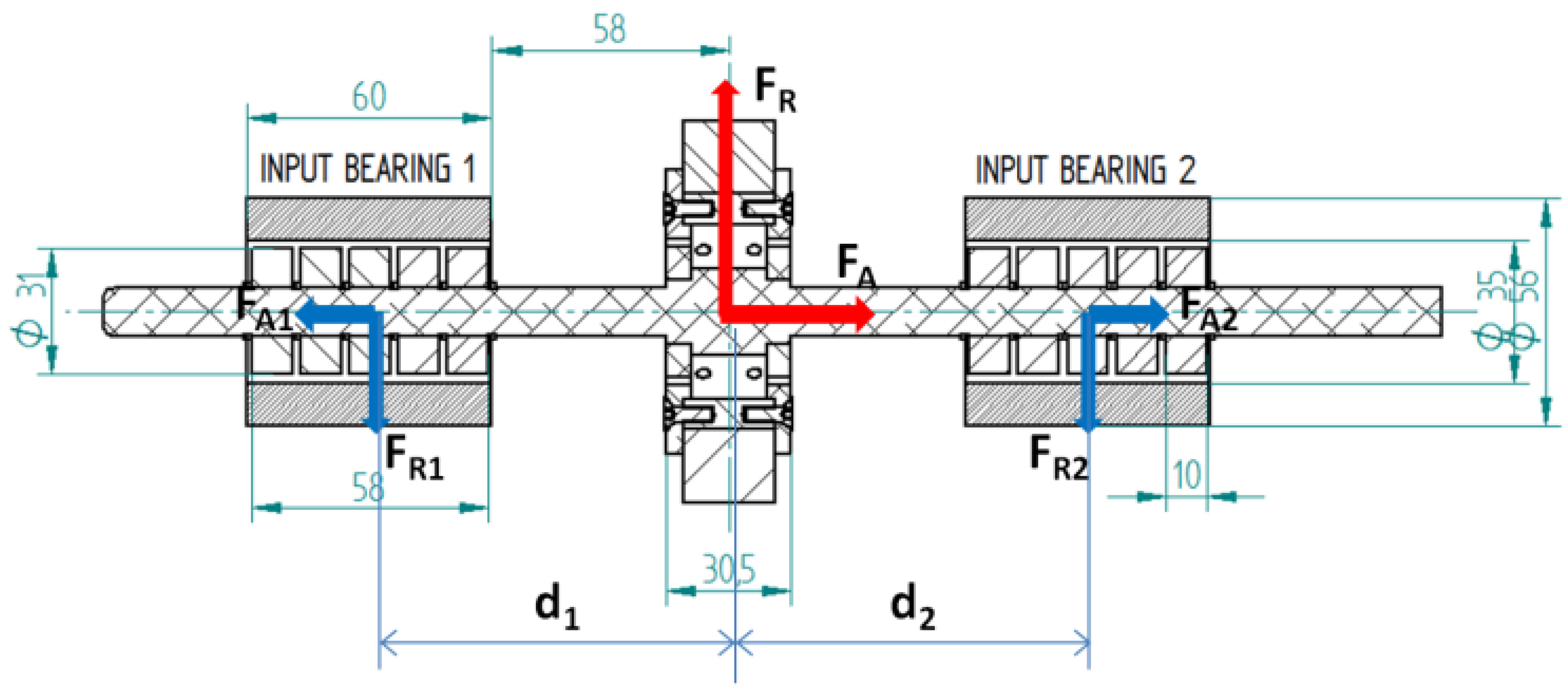
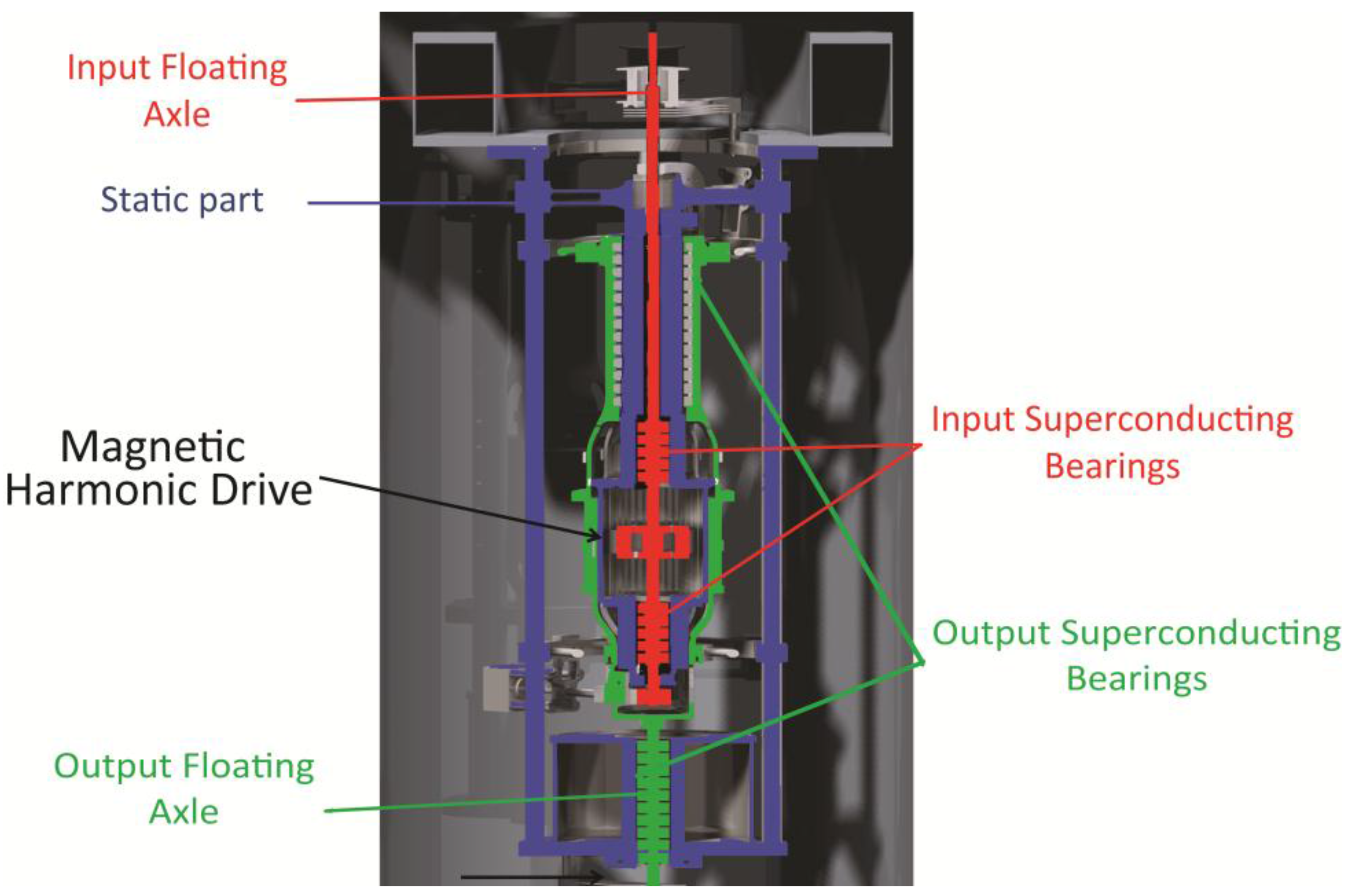
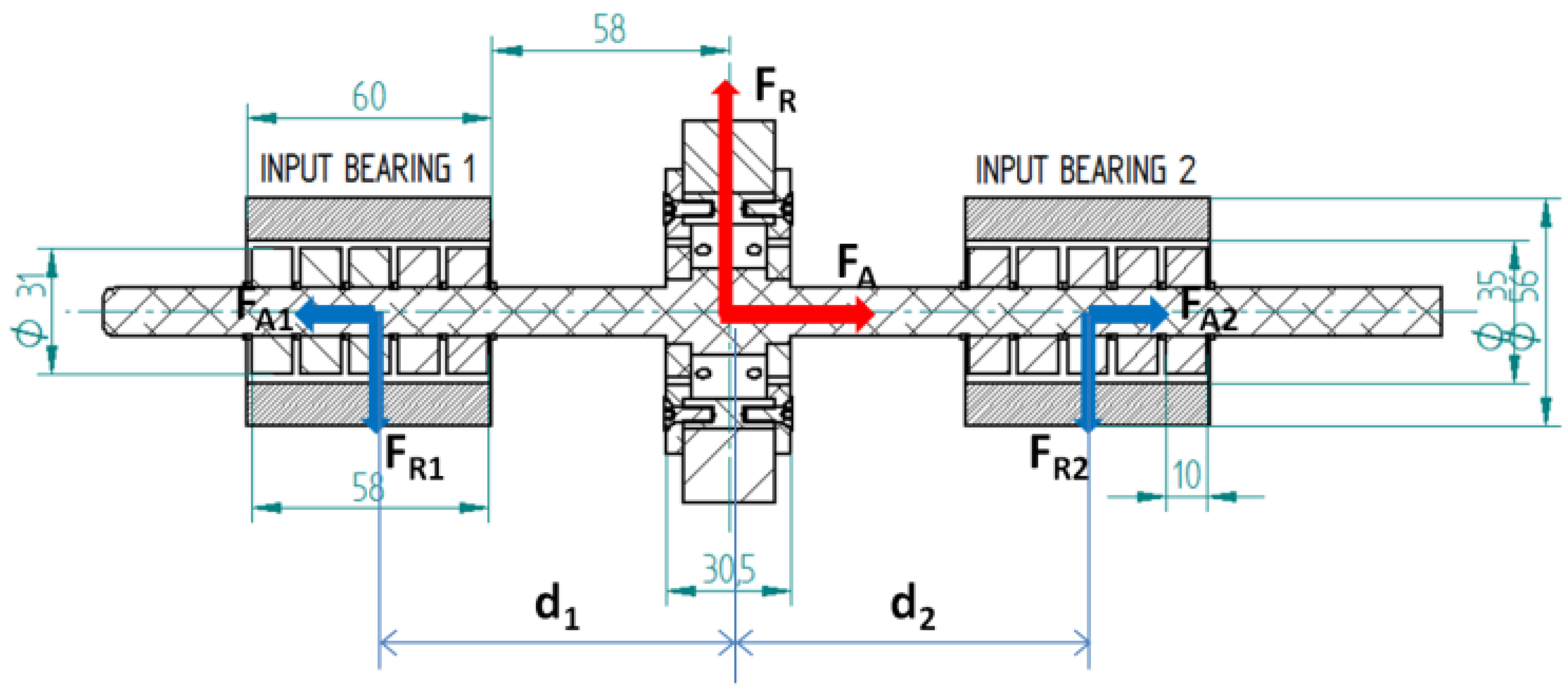
2.3. Mechanical and Thermal Design
2.4. Material Selection
3. Prototype Manufacturing and Assembly

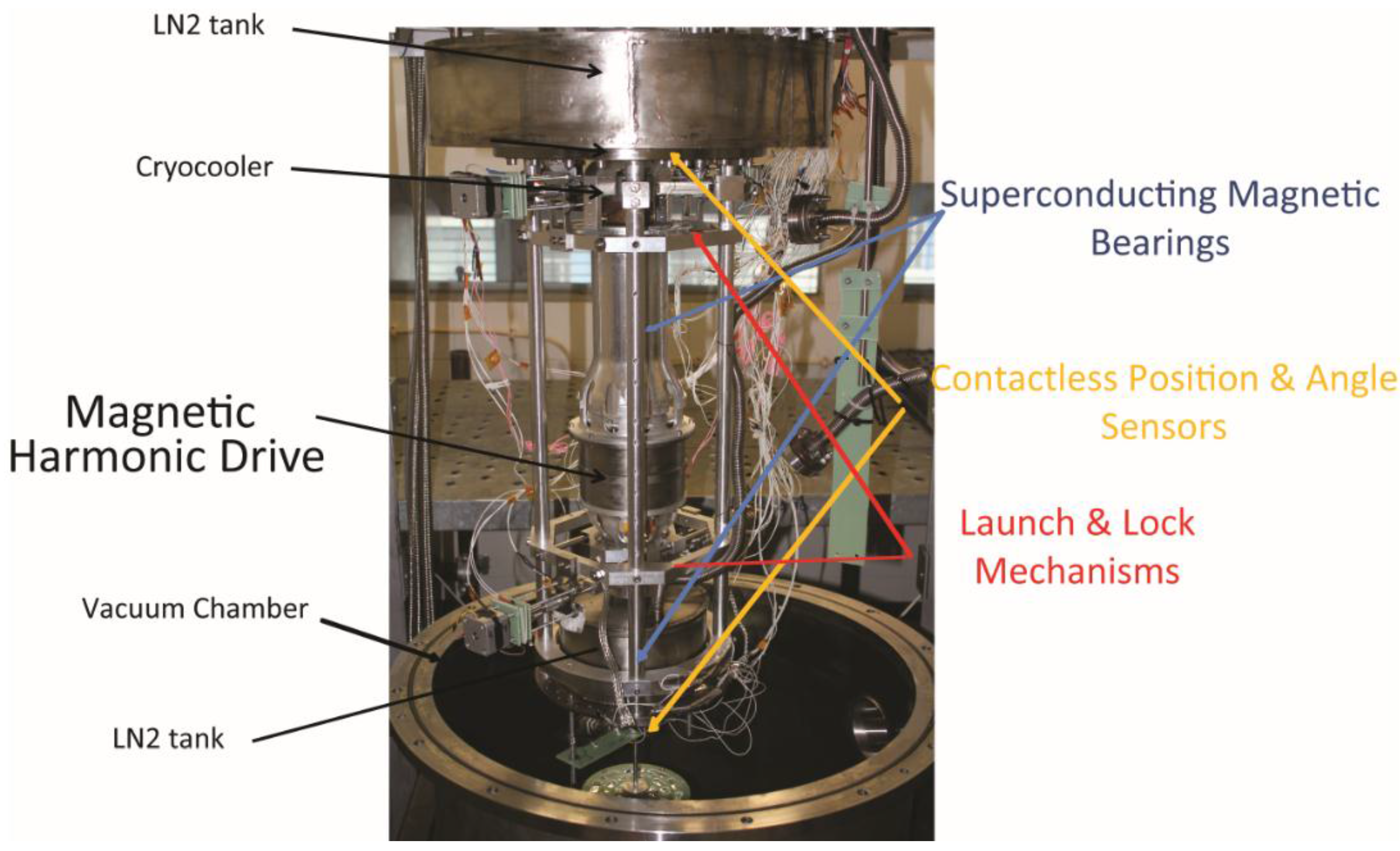
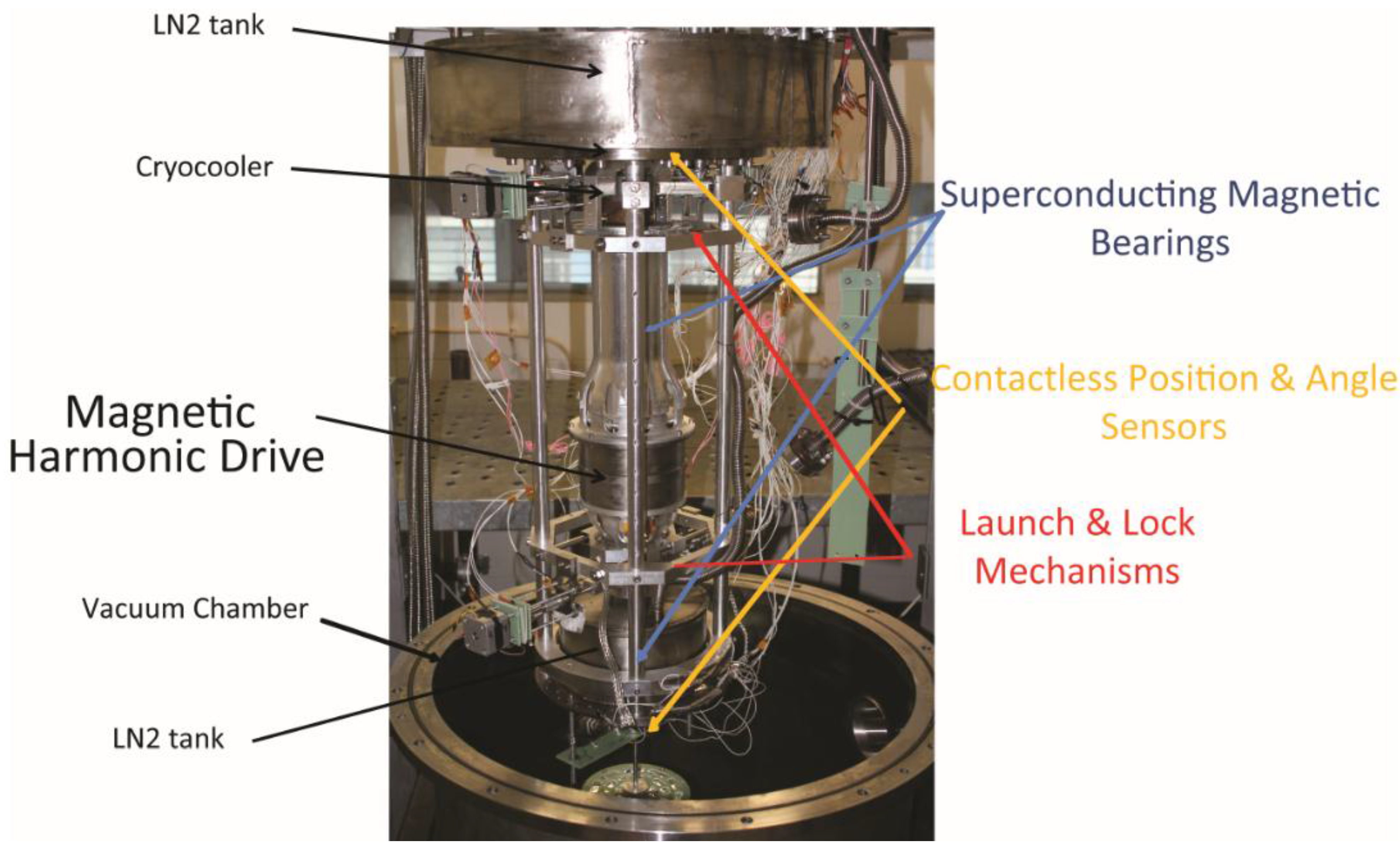
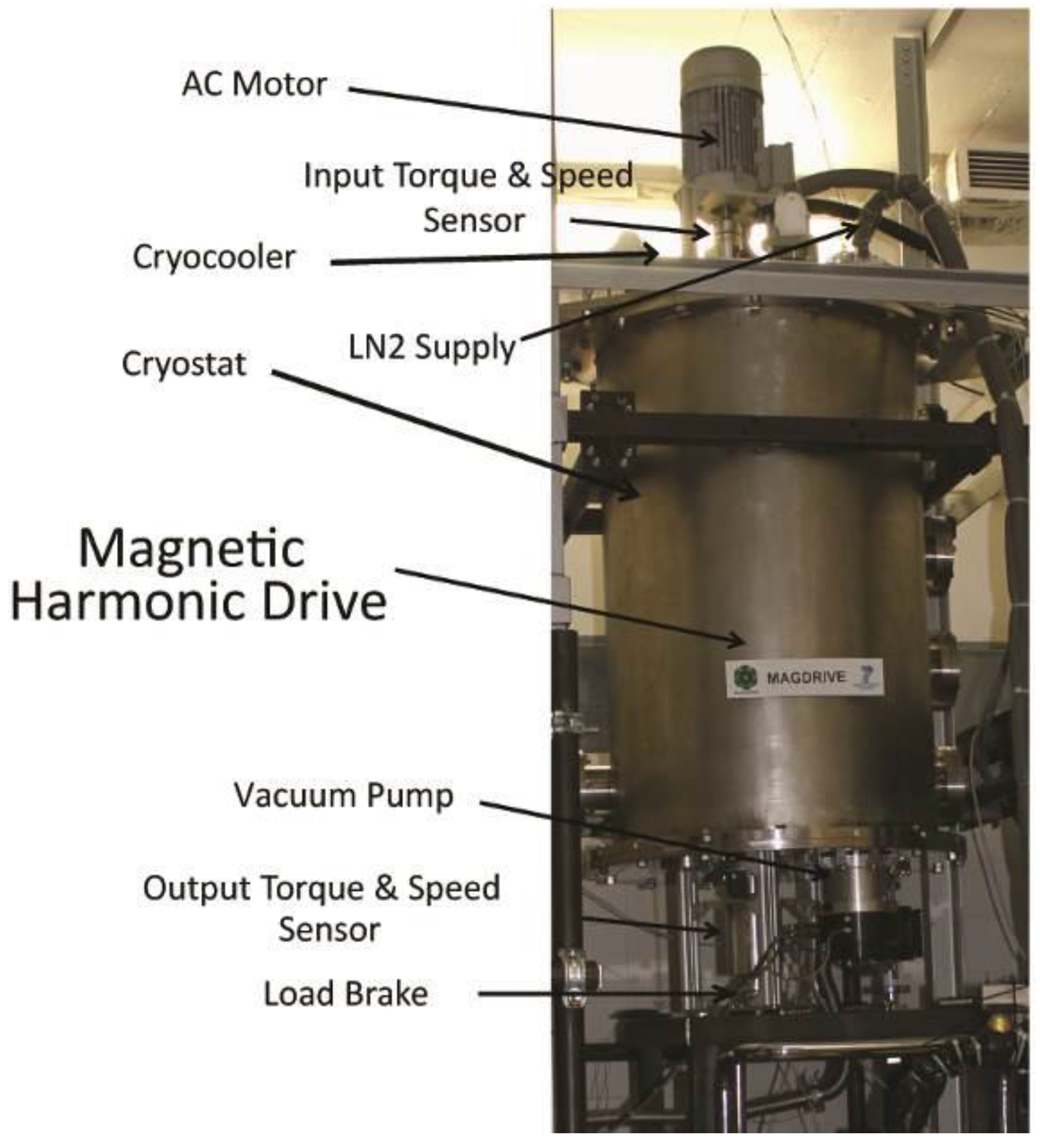
4. Experimental Test Rig
4.1. Thermal-Vacuum Chamber
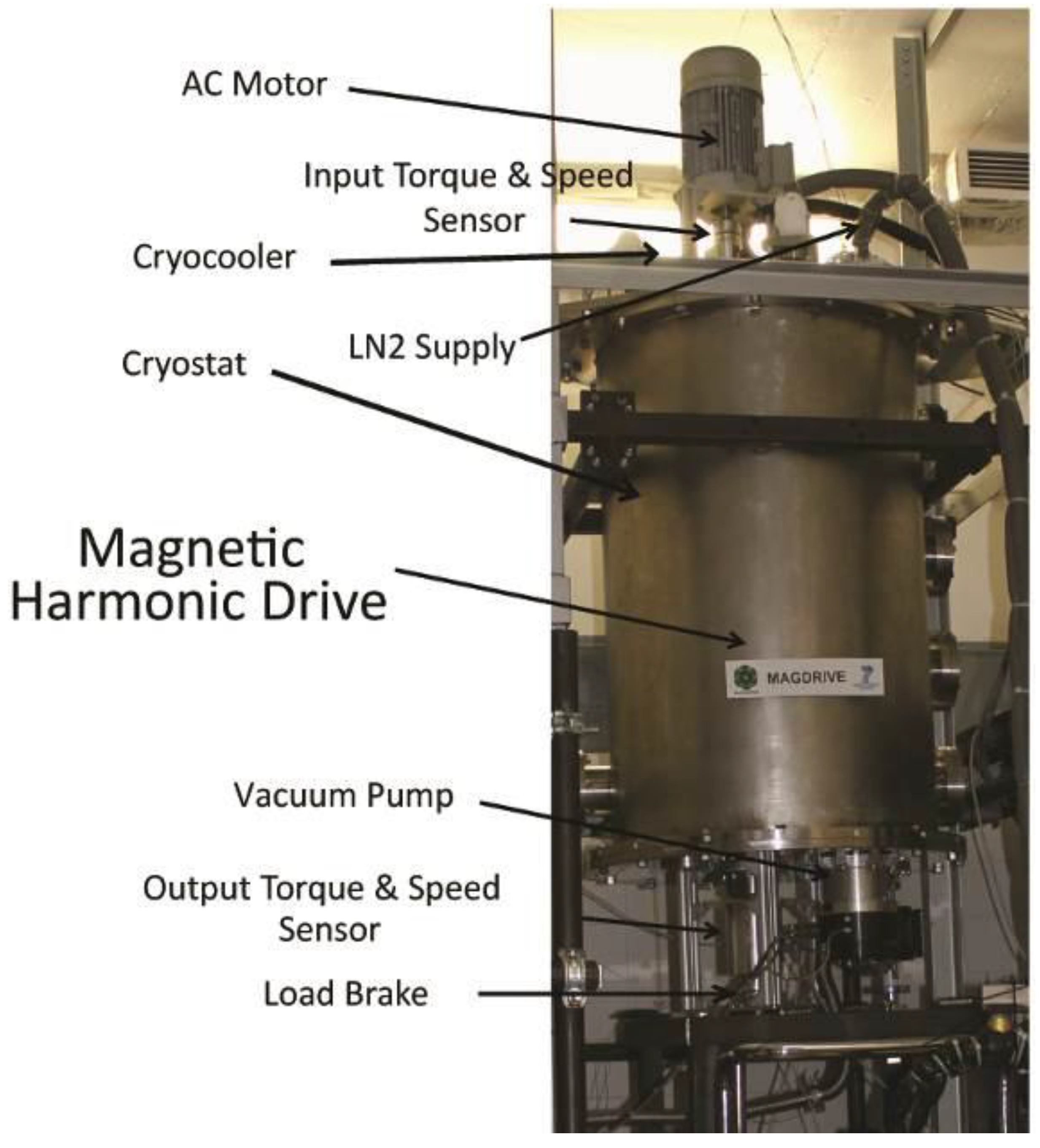
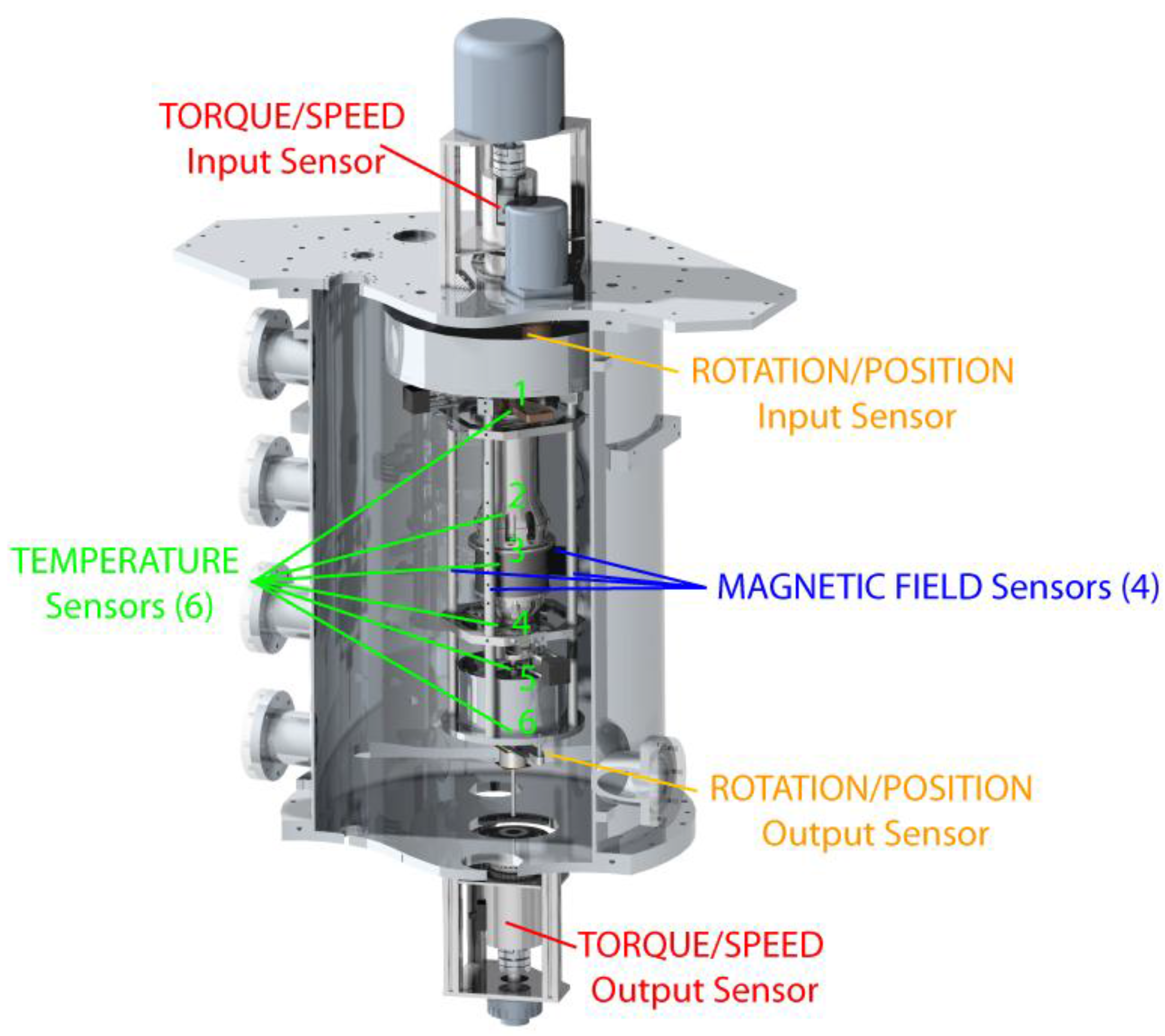
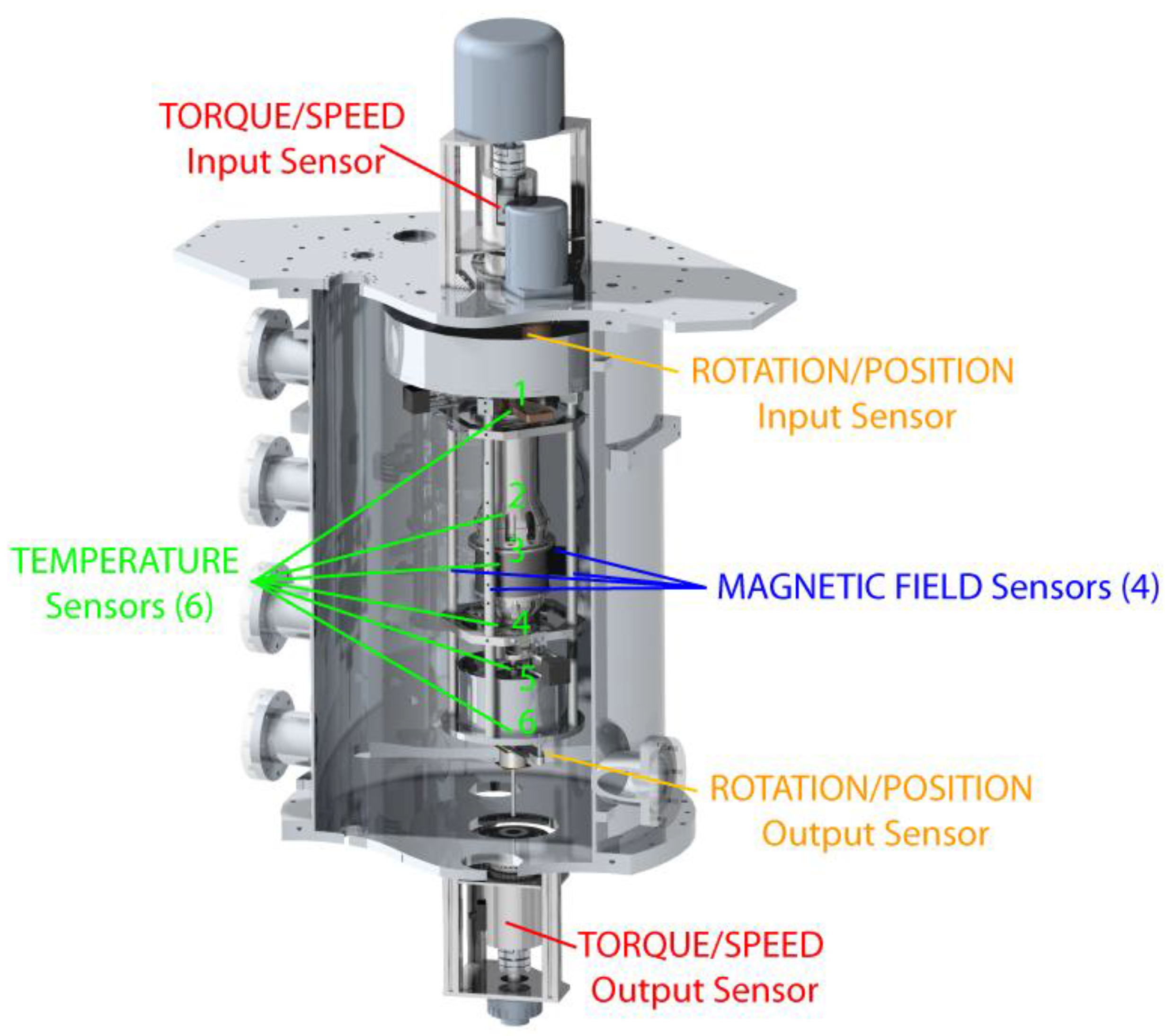
4.2. Sensing System
5. Performance Test Results and Discussion
5.1 Speed Tests

5.2. Torque Tests (Max Load Tests)
5.3. Lifetime
6. Conclusions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Reduction ratio | −1:20 |
| Maximum input speed | 3000 rpm |
| Maximum output torque | 3 Nm |
| Torque density (without SMB) | 25 kNm/m3 |
| Specific torque (without SMB) | 7 Nm/kg |
| Weight of magnetic gear | 428 g |
| Full prototype weight (SMB + sensors) | 15 kg |
| Operational test temperature | 40 K |
| Operational vacuum pressure | 3 × 10−3 Pa |
| Lifetime (input cycles number) | 1.5 million |
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Musser, C.W. Strain Wave Gearing. 2906143, 1955. Available online: http://www.google.es/patents/US2906143 (accessed on 26 June 2015). [Google Scholar]
- Hui, Z.; Jun, Z.; Sang, R.P.; Hong, H. Tungsten containing hydrogenated DLC coatings on grease lubricated harmonic drive gear for space application. Available online: http://www.esmats.eu/esmatspapers/pastpapers/pdfs/2011/zhou.pdf (accessed on 26 June 2015).
- Schmidt, J.; Schmid, M. Life Test of an Industrial Standard and of a Stainless Steel Harmonic Drive. Available online: http://www.esmats.eu/esmatspapers/pastpapers/pdfs/2011/schmidt.pdf (accessed on 26 June 2015).
- INTA. Antenna Pointing Mechanism for ESA Envisat Polar Platform. Available online: http://ntrs.nasa.gov/search.jsp?R=19960025607 (accessed on 26 June 2015).
- ESA. SENTINEL-2. 2012. Available online: http://esamultimedia.esa.int/multimedia/publications/SP-1322_2/ (accessed on 26 June 2015).
- ESA. European Non-Dependence on Critical Space Technologies: EC-ESA-EDA List of Urgent Actions for 2009. Available online: https://ec.europa.eu/research/participants/portal/doc/call/fp7/fp7-space-2010-1/14401-j_urgent_actions_201001_en.pdf (accessed on 26 June 2015).
- ESA/SRE (2009)6. SPICA: Revealing the Origins of Planets and Galaxies. 2009. Available online: http://sci.esa.int/science-e/www/object/doc.cfm?fobjectid=46023 (accessed on 26 June 2015).
- Research, E.A.; Programme, T.S. Harmonic Drive Gears for Space Applications. 2010. Available online: http://emits.sso.esa.int/emits-doc/ESTEC/ARTES5.1_Workplan2010%5b1%5d.pdf (accessed on 30 June 2015).
- Ostrovskaya, Y.L.; Yukhno, T.; Gamulya, G.; Vvedenskij, Y.V.; Kuleba, V. Low temperature tribology at the B. Verkin Institute for Low Temperature Physics & Engineering (historical review). Tribol. Int. 2001, 34, 265–276. [Google Scholar]
- Trautmann, A.; Siviour, C.R.; Walley, S.M.; Field, J.E. Lubrication of polycarbonate at cryogenic temperatures in the split Hopkinson pressure bar. Int. J. Impact Eng. 2005, 31, 523–544. [Google Scholar] [CrossRef]
- Theiler, G.; Gradt, T.; Klein, P. Friction and wear of PTFE composites at cryogenic temperatures. Tribol. Int. 2002, 35, 449–458. [Google Scholar] [CrossRef]
- Fleischer, N.; Genut, M.; Rapoport, L.; Tenne, R. New nanotechnology solid lubricants for superior dry lubrication. In Proceedings of the 10th European Space Mechanisms and Tribology Symposium, San Sebastián, Spain, 24–26 September 2003; pp. 65–66.
- Space Tribology Handbook; ESR Technology: Warrington, UK, 2012.
- Tsurumoto, K.S. A new magnetic gear using permanent magnet. IEEE Trans. Magn. 1987, 23, 3622–3624. [Google Scholar] [CrossRef]
- Shah, L.; Cruden, A.; Williams, B.W. A variable speed magnetic gear box using contra-rotating input shafts. IEEE Trans. Magn. 2011, 47, 431–438. [Google Scholar] [CrossRef]
- Yao, Y.; Huang, D.; Lee, C.; Wang, S.J.; Chiang, D.Y.; Ying, T.F. Magnetic Coupling Studies between Radial Magnetic Gears. IEEE Trans. Magn. 1997, 33, 4236–4238. [Google Scholar] [CrossRef]
- Chubb, L.W. Vernier Motor. 1894979, 1933. Available online: http://www.google.com/patents/US1894979 (accessed on 26 June 2015). [Google Scholar]
- Reese, G.A. Magnetic Gear Arrangement. 3301091, 1967. Available online: http://www.google.com/patents/US3301091 (accessed on 26 June 2015). [Google Scholar]
- Atallah, K.; Howe, D. A Novel High-Performance Magnetic Gear. IEEE Trans. Magn. 2001, 37, 2844–2846. [Google Scholar] [CrossRef]
- Rasmussen, P.; Andersen, T.; Joergensen, F.T.; Nielsen, O. Development of a High-Performance Magnetic Gear. In Industry Applications Conference, 38th IAS Annual Meeting; pp. 1696–1702.
- Bassani, R.; Villani, S. Passive magnetic bearings: the conic-shaped bearing. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 1999, 213, 151–161. [Google Scholar] [CrossRef]
- Bassani, R. Levitation of passive magnetic bearings and systems. Tribol. Int. 2006, 39, 963–970. [Google Scholar] [CrossRef]
- Bassani, R. Magnetoelastic Stability of Magnetic Axial Bearings. Tribol. Lett. 2012, 49, 397–401. [Google Scholar] [CrossRef]
- Maslen, E.H.; Allaire, P.E.; Noh, M.D.; Sortore, C.K. Magnetic Bearing Design for Reduced Power Consumption. J. Tribol. 1996, 118. [Google Scholar] [CrossRef]
- Di Puccio, F.; Bassani, R.; Ciulli, E.; Musolino, A.; Rizzo, R. Permanent magnet bearings: Analysis of plane and axisymmetric V-shaped element design. Prog. Electromagn. Res. M. 2012, 26, 205–223. [Google Scholar] [CrossRef]
- Musolino, A.; Rizzo, R.; Tucci, M.; Matrosov, V.M. A New Passive Maglev System Based on Eddy Current Stabilization. IEEE Trans. Magn. 2009, 45, 984–987. [Google Scholar] [CrossRef]
- Werfel, F.N.; Floegel-Delor, U.; Rothfeld, R.; Riedel, T.; Goebel, B.; Wippich, D.; Schirrmeister, P. Superconductor bearings, flywheels and transportation. Supercond. Sci. Technol. 2012, 25. [Google Scholar] [CrossRef]
- Navarro, R.; Elswijk, E.; Tromp, N.; Kragt, J.; Kroes, G.; Hanenburg, H.; de Haan, M.; Schuil, M.; Teuwen, M.; Janssen, H.; et al. Precision Mechanism for Optics in a Vacuum Cryogenic Environment. Available online: http://www.congrexprojects.com/custom/icso/Papers/Session%209a/FCXNL-10A02-2019781-1-NAVARRO_ICSO_PAPER.pdf (accessed on 26 June 2015).
- Weisensel, G.N.; McMasters, O.D.; Chave, R.G. Cryogenic magnetostrictive transducers and devices for commercial, military, and space applications. Proc. SPIE. 1998, 3326, 459–470. [Google Scholar]
- Maillard, T.; Claeyssen, F.; LeLetty, R.; Sosnicki, O.; Pages, A.; Vazquez Carazo, A. Piezomechatronic-based systems in aircraft, space, and defense applications. Proc. SPIE 2009, 7331. [Google Scholar] [CrossRef]
- Perez-Diaz, J.L.; Valiente-Blanco, I. Superconducting Noncontact Device for Precision Positioning in Cryogenic Environments. Mechatronics 2013. [Google Scholar] [CrossRef]
- Iizuka, T.; Maeda, Y.; Aihara, K.; Fujita, H. A Micro X-Y-θ Conveyor by using Superconducting Magnetic Levitation. IEEE Symp. Emerg. Technol. Fact. Autom. 1994. [Google Scholar] [CrossRef]
- Pérez-Díaz, J.-L.; García-Prada, J.C.; Diez-Jimenez, E.; Valiente-Blanco, I.; Sander, B.; Timm, L.; Juan, S.-G.-C.; Serrano, J.; Romera, F.; Argelaguet-Vilaseca, H.; et al. Non-contact linear slider for cryogenic environment. Mech. Mach. Theory. 2012, 49, 308–314. [Google Scholar] [CrossRef]
- Serrano-tellez, J.; Romera-juarez, F.; González-de-maría, D.; Lamensans, M. Experience on A Cryogenic Linear Mechanism Based on Superconducting Levitation. Available online: http://proceedings.spiedigitallibrary.org/proceeding.aspx?articleid=1359771 (accessed on 26 June 2015).
- Morales, W.; Fusaro, R.; Kascak, A. Permanent Magnetic Bearing for Spacecraft Applications. Tribol. Trans. 2003, 46, 460–464. [Google Scholar] [CrossRef]
- Valiente-Blanco, I.; Diez-Jimenez, E.; Perez-Diaz, J.L. Alignment effect between a magnet over a superconductor cylinder in the Meissner state. J. Appl. Phys. 2011, 109, 07E704. [Google Scholar] [CrossRef]
- Diez-Jimenez, E.; Perez-Diaz, J.L. Foundations of Meissner Superconductor Magnet Mechanisms Engineering. Available online: http://cdn.intechopen.com/pdfs-wm/16235.pdf (accessed on 26 June 2015).
- Diez-Jimenez, E.; Perez-Diaz, J. Flip effect in the orientation of a magnet levitating over a superconducting torus in the Meissner state. Phys. C Supercond. 2011, 471, 8–11. [Google Scholar] [CrossRef]
- Diez-Jimenez, E.; Sander, B. Tailoring of the flip effect in the orientation of a magnet levitating over a superconducting torus: Geometrical dependencies. C Supercond. Phys. C Supercond. 2011, 471, 229–232. [Google Scholar] [CrossRef]
- Perez-Diaz, J.L.; Diez-Jimenez, E.; Valiente-Blanco, I.; Herrero-de-Vicente, J. Stable thrust on a finite-sized magnet above a Meissner superconducting torus. J. Appl. Phys. 2013, 113. [Google Scholar] [CrossRef]
- Diez-Jimenez, E.; Valiente-Blanco, I.; Perez-Diaz, J. Superconducting Sphere and Finite-Size Permanent Magnet: Force, Torque, and Alignment Effect Calculation. J. Supercond. Nov. Magn. 2012, 26, 71–75. [Google Scholar] [CrossRef]
- Diez-Jimenez, E.; Perez-Diaz, J.L.; Garcia-Prada, J.C. Mechanical method for experimental determination of the first penetration field in high-temperature superconductors. IEEE Trans. Appl. Supercond. 2011. [Google Scholar] [CrossRef]
- Diez-Jimenez, E.; Perez-Diaz, J.L.; Castejon, C. Finite element algorithm for solving supercondcuting Meissner repulsion forces. Int. Rev. Mech. Eng. 2010, 4, 673–675. [Google Scholar]
- Diez-Jimenez, E.; Perez-Diaz, J.L.; Garcia-Prada, J.C. Local model for magnet–superconductor mechanical interaction: Experimental verification. J. Appl. Phys. 2011, 109, 063901. [Google Scholar] [CrossRef]
- Navau, C.; Sanchez, A. Stiffness and energy losses in cylindrically symmetric superconductor levitating systems. Supercond. Sci. Technol. 2002, 15, 1445–1453. [Google Scholar] [CrossRef]
- Qin, Y.; Hou, X. Influence of maglev force relaxation on the forces of bulk HTSC subjected to different lateral displacements above the NdFeB guideway. Phys. C Supercond. 2011, 471, 118–120. [Google Scholar] [CrossRef]
- Xia, Z.; Chen, Q.Y.; Ma, K.B.; McMichael, C.K.; Lamb, M.; Cooley, R.S. Design of superconducting magnetic bearings with high levitating force for flywheel energy storage systems. IEEE Trans. Appiled Supercond. 1995, 5, 622–625. [Google Scholar] [CrossRef]
- Valiente-Blanco, I.; Diez-Jimenez, E. Characterization and Improvement of Axial and Radial Stiffness of Contactless Thrust Superconducting Magnetic Bearings. Tribol. Lett. 2014, 54, 213–220. [Google Scholar] [CrossRef]
- Valiente-Blanco, I.; Diez-Jimenez, E.; Perez-Diaz, J. Dynamics of a superconducting linear slider. J. Vib. Acoust. 2015, 137. [Google Scholar] [CrossRef]
- Valiente-Blanco, I.; Diez-Jimenez, E.; Sanchez-Garcia-Casarrubios, J.; Perez-Diaz, J.L. Improving Resolution and Run outs of a Superconducting Non-Contact Device for Precision Positioning. IEEE/ASME Trans. Mechatron. 2014. [Google Scholar] [CrossRef]
- Diez-Jimenez, E.; Perez-Diaz, J.L.; Canepa, F.; Ferdeghini, C. Invariance of the magnetization axis under spin reorientation transitions in polycrystalline magnets of Nd2Fe14B. J. Appl. Phys. 2012, 112. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Perez-Diaz, J.L.; Diez-Jimenez, E.; Valiente-Blanco, I.; Cristache, C.; Alvarez-Valenzuela, M.-A.; Sanchez-Garcia-Casarrubios, J.; Ferdeghini, C.; Canepa, F.; Hornig, W.; Carbone, G.; et al. Performance of Magnetic-Superconductor Non-Contact Harmonic Drive for Cryogenic Space Applications. Machines 2015, 3, 138-156. https://doi.org/10.3390/machines3030138
Perez-Diaz JL, Diez-Jimenez E, Valiente-Blanco I, Cristache C, Alvarez-Valenzuela M-A, Sanchez-Garcia-Casarrubios J, Ferdeghini C, Canepa F, Hornig W, Carbone G, et al. Performance of Magnetic-Superconductor Non-Contact Harmonic Drive for Cryogenic Space Applications. Machines. 2015; 3(3):138-156. https://doi.org/10.3390/machines3030138
Chicago/Turabian StylePerez-Diaz, Jose Luis, Efren Diez-Jimenez, Ignacio Valiente-Blanco, Cristian Cristache, Marco-Antonio Alvarez-Valenzuela, Juan Sanchez-Garcia-Casarrubios, Carlo Ferdeghini, Fabio Canepa, Wolfgang Hornig, Giuseppe Carbone, and et al. 2015. "Performance of Magnetic-Superconductor Non-Contact Harmonic Drive for Cryogenic Space Applications" Machines 3, no. 3: 138-156. https://doi.org/10.3390/machines3030138
APA StylePerez-Diaz, J. L., Diez-Jimenez, E., Valiente-Blanco, I., Cristache, C., Alvarez-Valenzuela, M.-A., Sanchez-Garcia-Casarrubios, J., Ferdeghini, C., Canepa, F., Hornig, W., Carbone, G., Plechacek, J., Amorim, A., Frederico, T., Gordo, P., Abreu, J., Sanz, V., Ruiz-Navas, E.-M., & Martinez-Rojas, J.-A. (2015). Performance of Magnetic-Superconductor Non-Contact Harmonic Drive for Cryogenic Space Applications. Machines, 3(3), 138-156. https://doi.org/10.3390/machines3030138