
Analysis of Flexible Bearing Load Under Various Torque Conditions




Abstract
1. Introduction
2. Model and Methodology for FB Ball Load
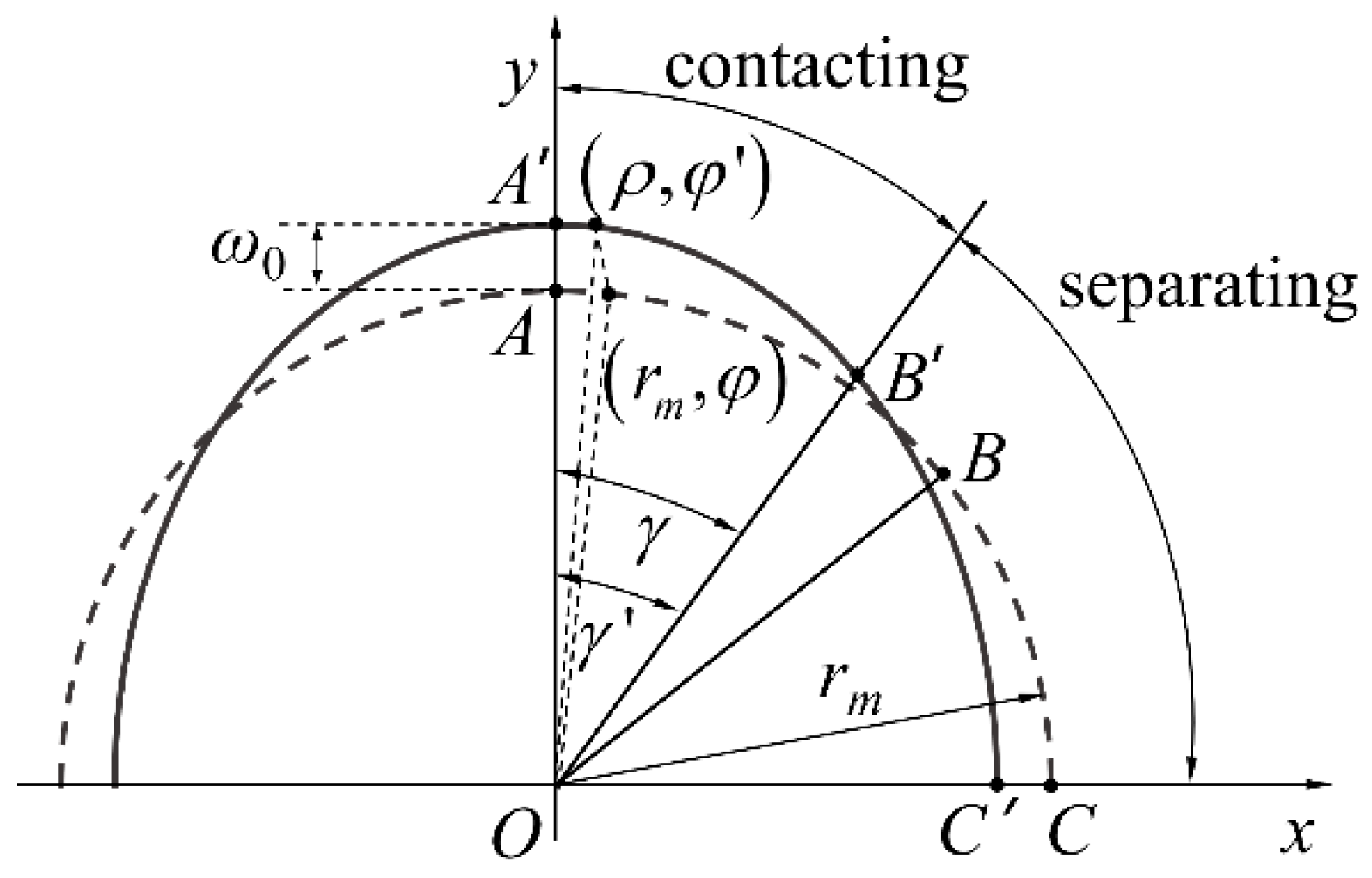
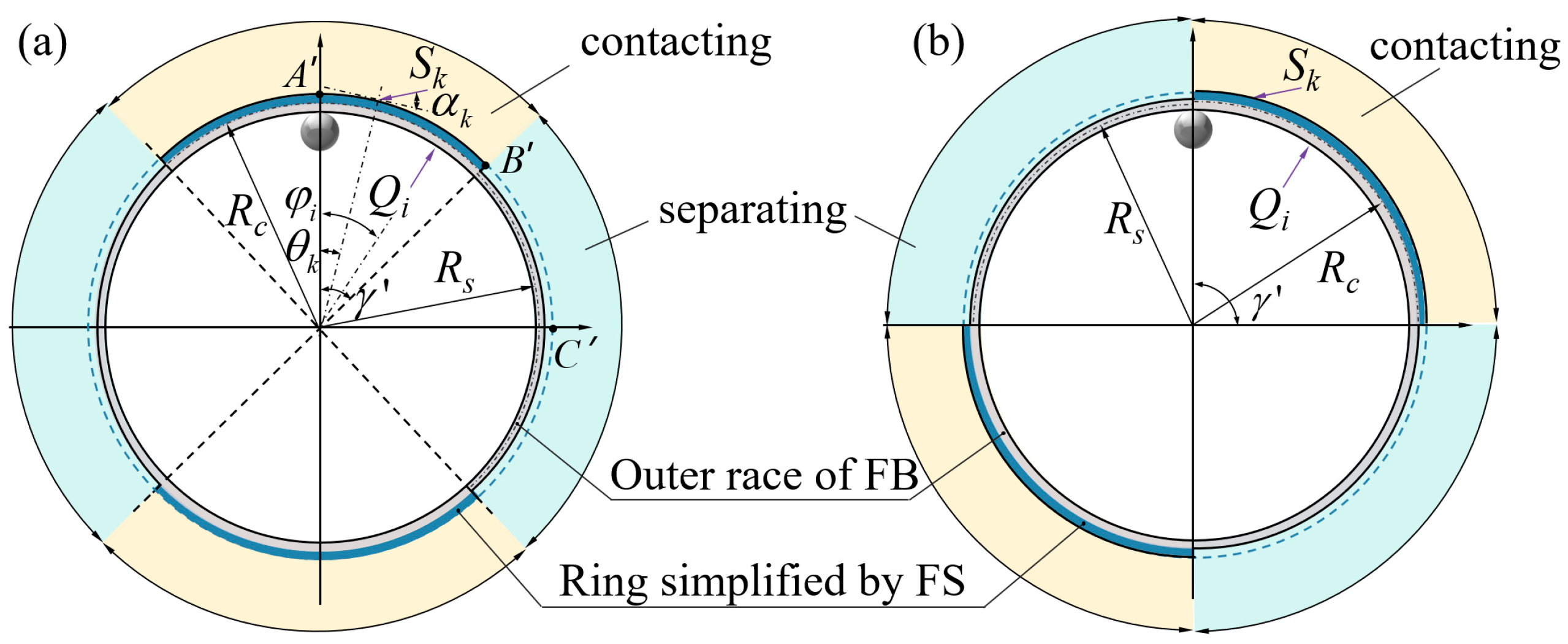
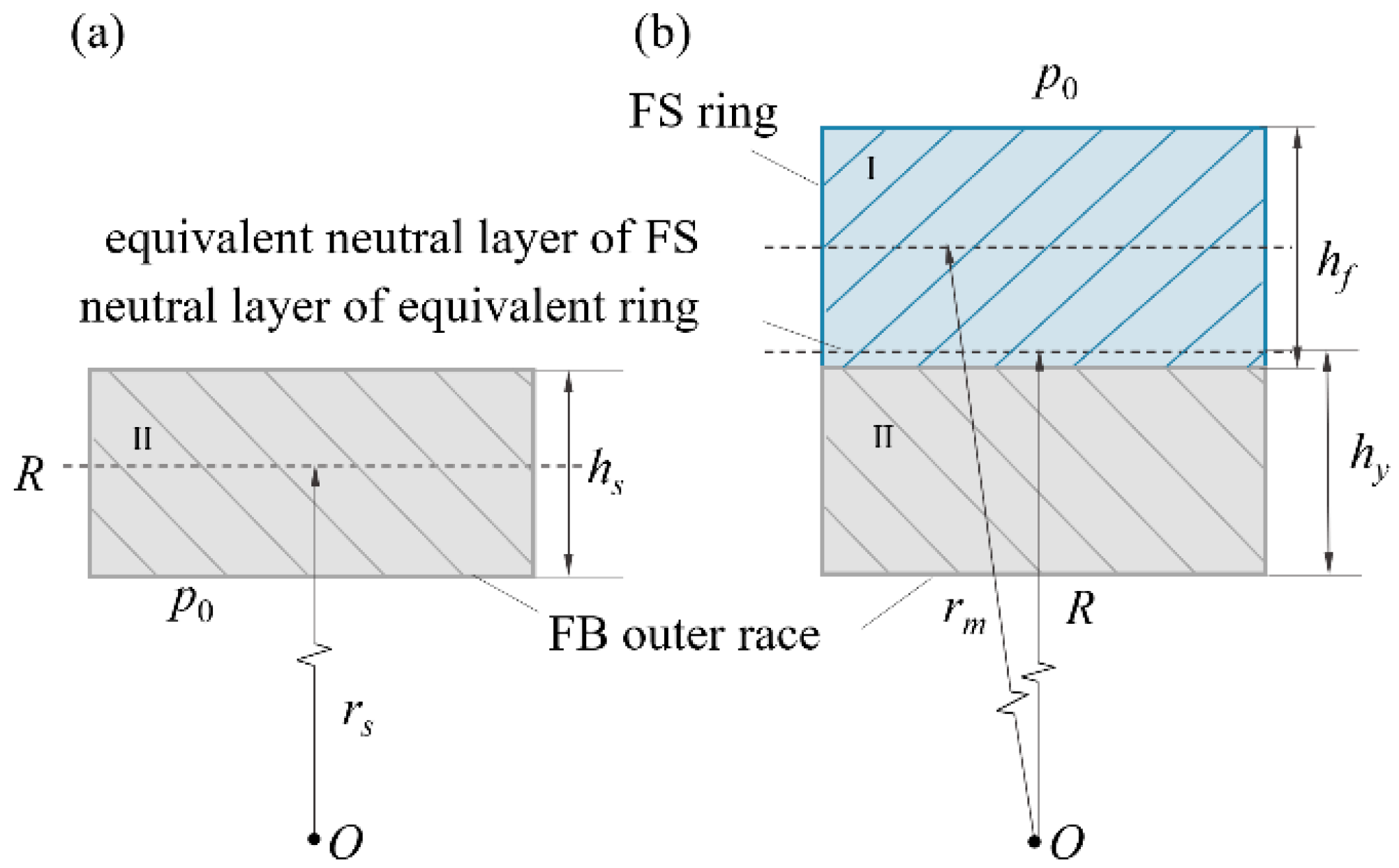
2.1. Improved Equivalent Ring
- (1)
- If the point on the equivalent ring exceeds the range of the wrapping angle, thenwhere rs is the neutral line radius of the FB outer race.
- (2)
- If the point on the equivalent ring does not exceed the range of the wrapping angle, thenwhere hs is the thickness of the FB outer race.
- (1)
- If the point on the equivalent ring exceeds the range of the wrapping angle, thenwhere Is is the inertia moment of the outer race section.
- (2)
- If the point on the equivalent ring does not exceed the range of the wrapping angle, then
2.2. Superposition Method for FB Ball Load
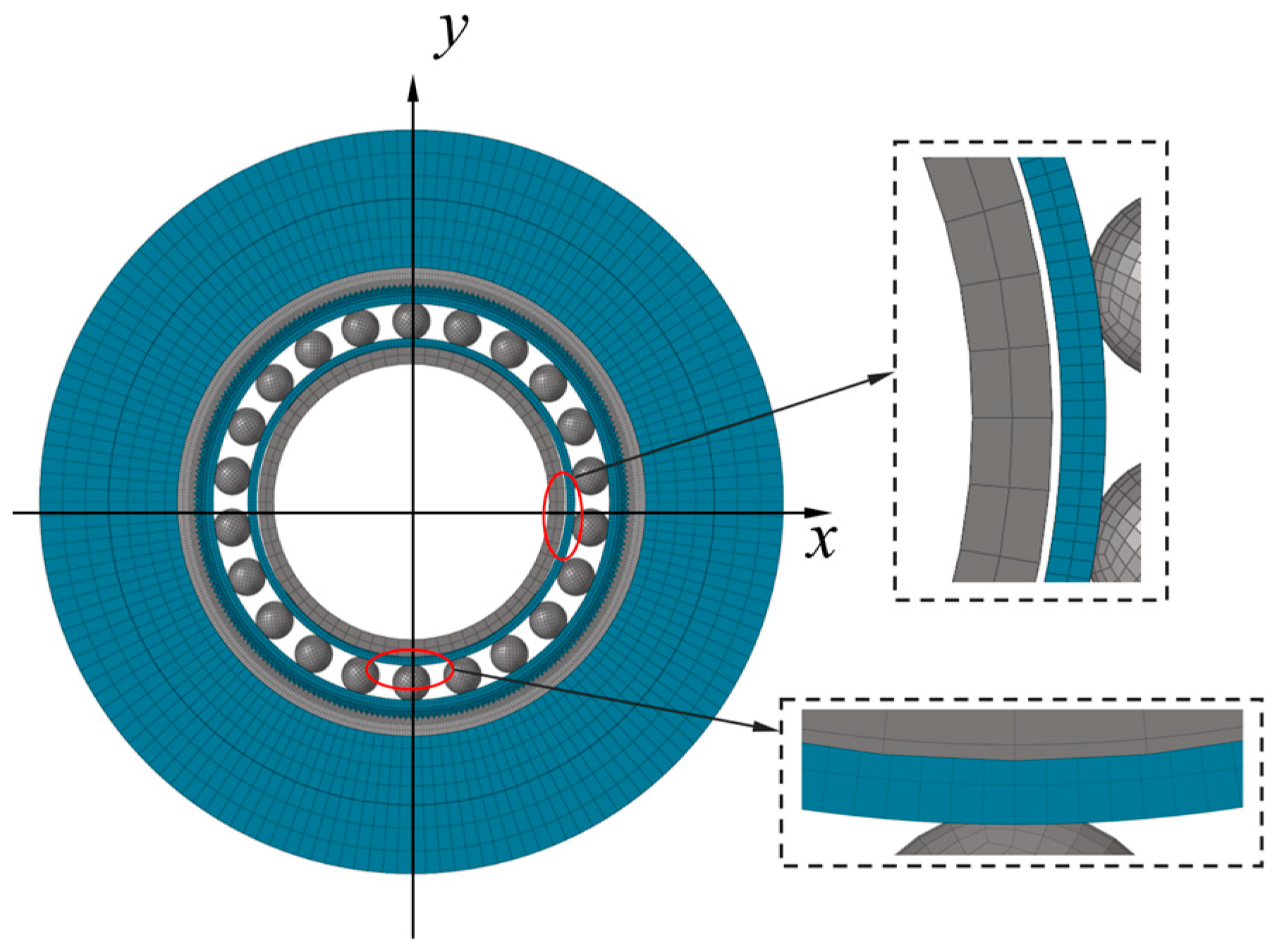
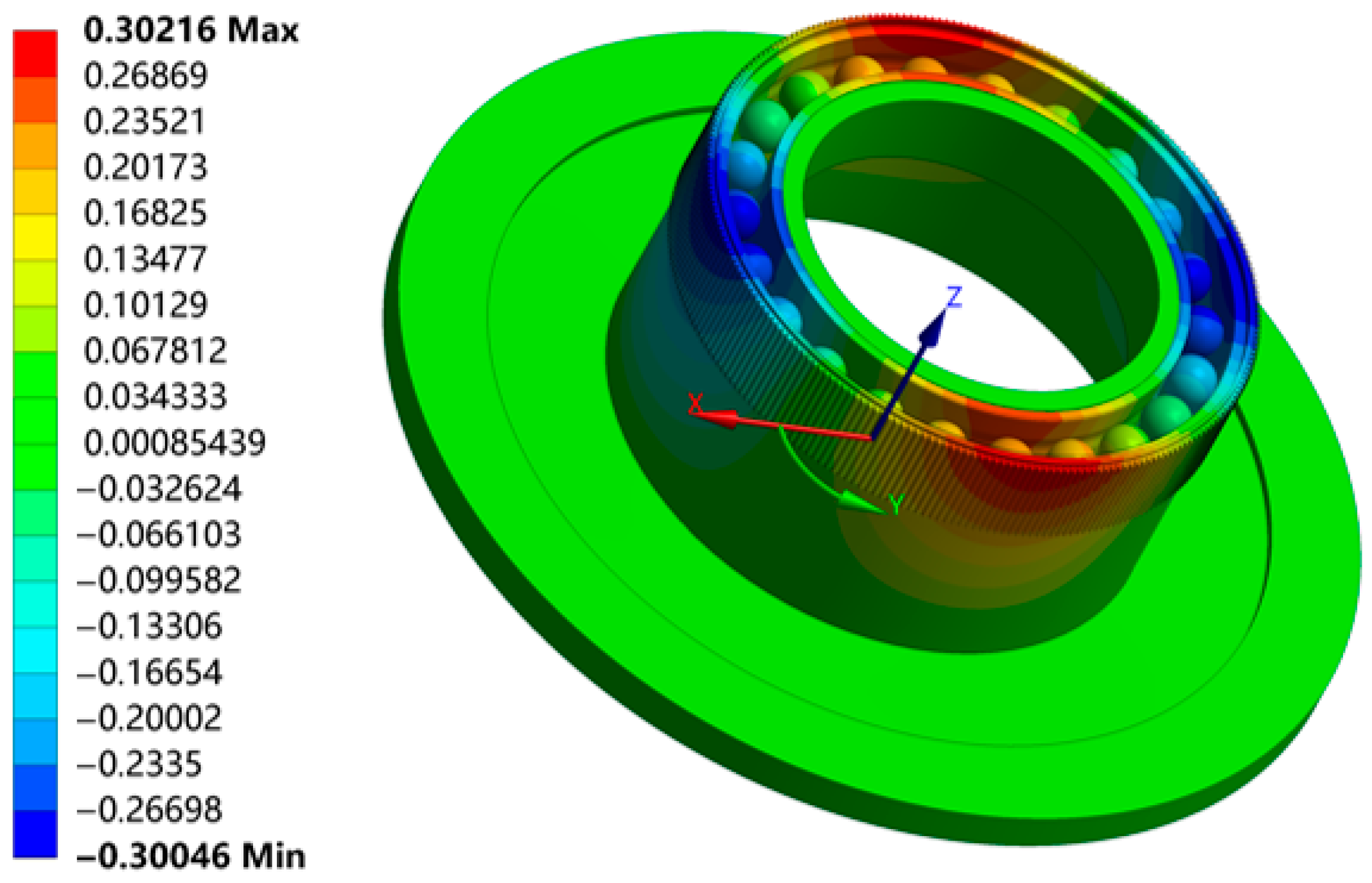
2.3. Validation of FB Ball Load
3. Analyses of Influence on FB Ball Load
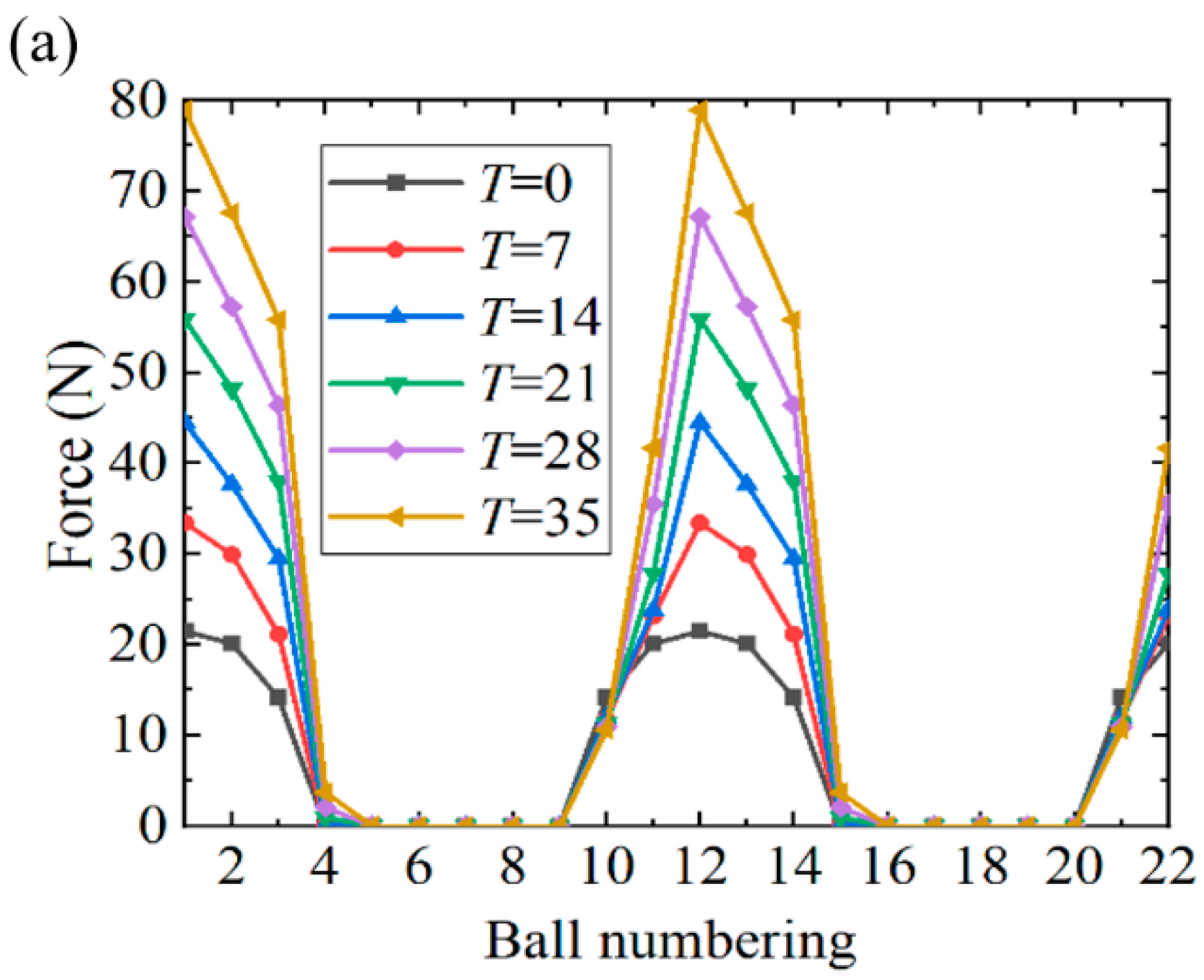
3.1. Influence of External Torque T
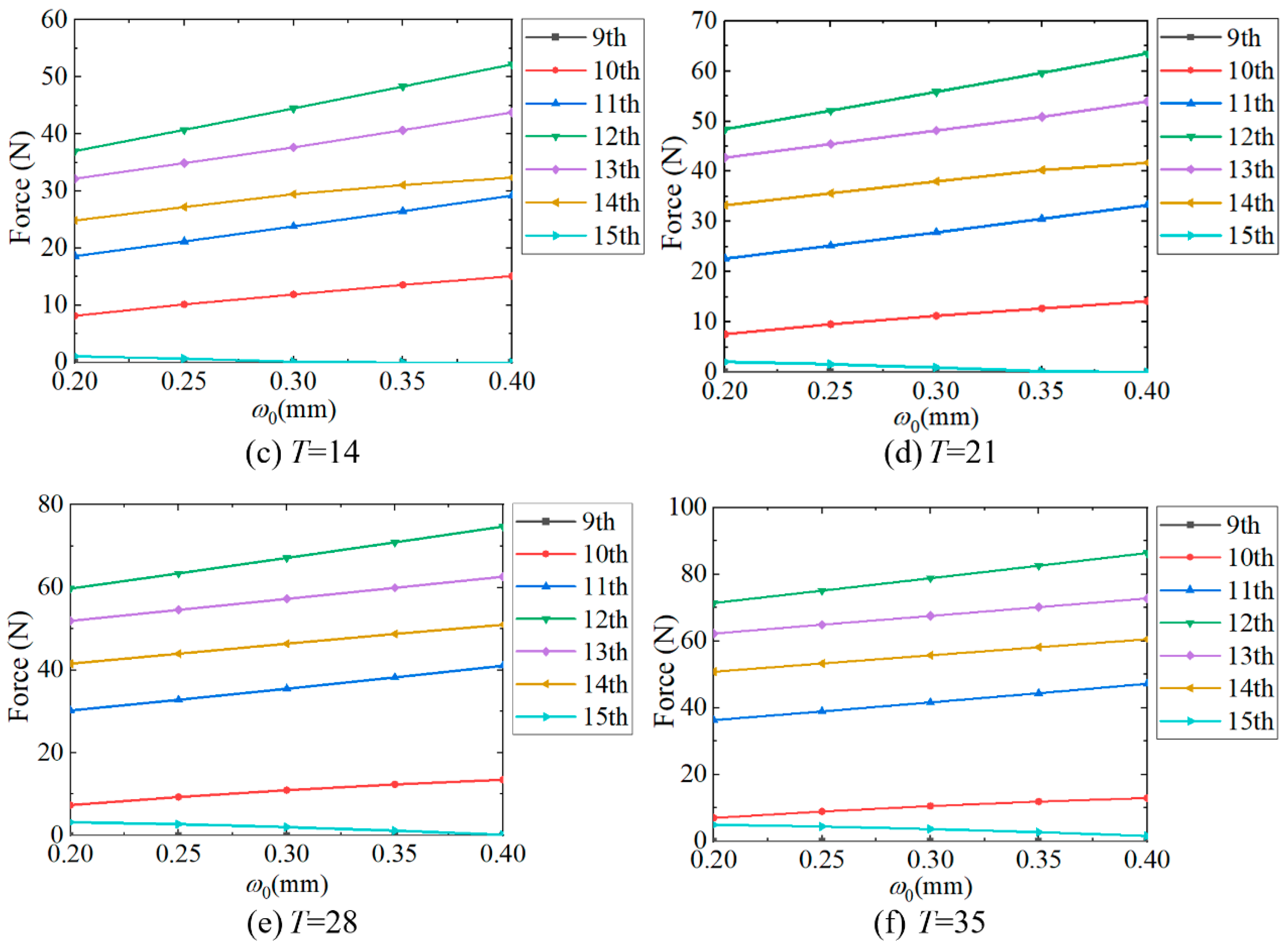
3.2. Influence of the Maximum Radial Deformation ω0
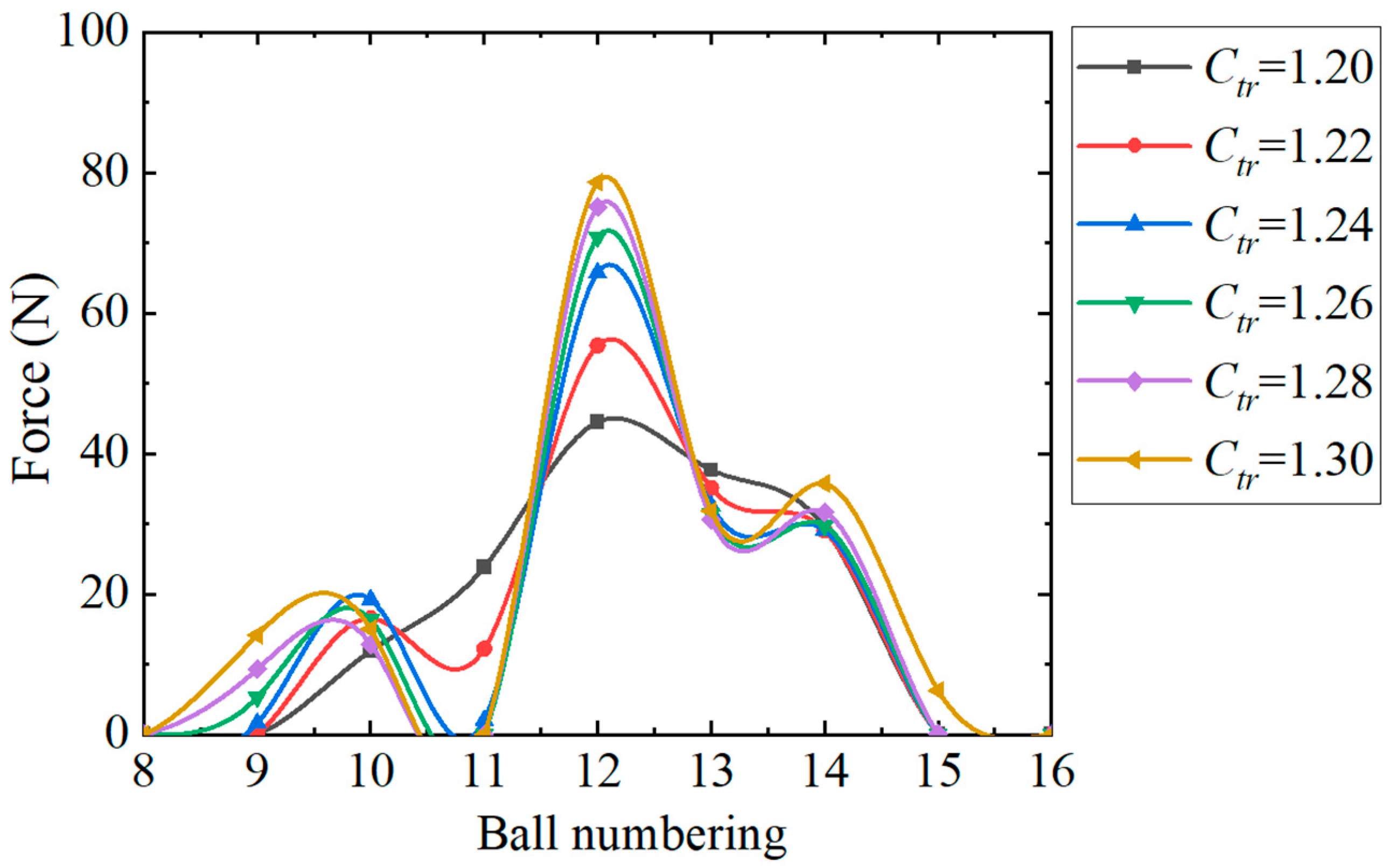
3.3. Influence of the FS Bending Stiffness Coefficient Ctr
4. Orthogonal Simulations and Fitting Formulae
4.1. Orthogonal Simulation Under Low Torque
4.2. Orthogonal Simulation Under Rated Torque
5. Conclusions
- (1)
- The ball load solution model is established under various external torques by analyzing the contact and deformation of the FS and the FB. The calculation of the FB ball load is more consistent with that of the FEM model. The maximum error of the ball load engaged in contact is 6.09%, and the accuracy was improved by 59.58% compared to the original equivalent ring model.
- (2)
- The FB ball load is greatly affected by the geometric parameters of the FS tooth. As the root thickness and the dedendum arc radius increase, the maximum ball load increases, and when the tooth rack thickness increases, the maximum ball load decreases. With the bending stiffness coefficient increasing from 1.2 to 1.3, the maximum ball load increases by 76.7%.
- (3)
- The geometric parameters that mainly affect the ball load vary under different external torques. The maximum radial deformation is the main factor under low external torque, while the bending stiffness coefficient is the main factor under rated external torque. This provides a basis for selecting the correction of the geometric parameters in subsequent wear analysis.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Song, C.; Li, X.; Zhu, C.; Du, X. Parametric analysis of tooth surface characteristics of flexspline in harmonic reducer after hobbing. Mech. Mach. Theory 2024, 194, 220–225. [Google Scholar] [CrossRef]
- Song, C.; Zhu, F.; Li, X.; Du, X. Three-dimensional conjugate tooth surface design and contact analysis of harmonic drive with double-circular-arc tooth profile. Chin. J. Mech. Eng. 2023, 36, 83. [Google Scholar] [CrossRef]
- Li, S. Diaphragm stress analysis and fatigue strength evaluation of the flex-spline, a very thin-walled spur gear used in the strain wave gearing. Mech. Mach. Theory 2016, 104, 1–16. [Google Scholar] [CrossRef]
- Dong, H.; Dong, B.; Zhang, C.; Wang, D. An equivalent mechanism model for kinematic accuracy analysis of harmonic drive. Mech. Mach. Theory 2022, 173, 104825. [Google Scholar] [CrossRef]
- Gamboa, J. Design and implementation of a pilot test for an industrial prototype of harmonic drive using a FPGA real-time system to implements control and instrumentation. Comput. Sci. 2009, 4, 297–303. [Google Scholar]
- Zhang, C.; Song, Z.; Liu, Z.; Cheng, Q.; Zhao, Y. Wear mechanism of flexspline materials regulated by novel amorphous/crystalline oxide form evolution at frictional interface. Tribol. Int. 2019, 135, 335–343. [Google Scholar] [CrossRef]
- Xing, J.; Yang, Z.; Ren, Y. Analysis of bifurcation and chaotic behavior for the flexspline of an electromagnetic harmonic drive system with movable teeth transmission. Appl. Math. Model. 2022, 112, 467–485. [Google Scholar] [CrossRef]
- Guida, R.; Bertolino, A.; De Martin, A.; Sorli, M. Comprehensive analysis of major fault-to-failure mechanisms in harmonic drives. Machines 2024, 12, 776. [Google Scholar] [CrossRef]
- Adams, C.; Skowronek, A.; Boes, J.; Melz, T. Vibrations of Elliptically Shaped Bearings in Strain Wave Gearing. J. Vib. Acoust. 2016, 138, 021004.1–021004.6. [Google Scholar] [CrossRef]
- Le, K.; Shen, Y. Load distribution on the wave generator of harmonic gear transmission. Mech. Sci. Technol. Aerosp. Eng. 1990, 34, 38–45. [Google Scholar]
- Shao, F.; Wen, S. Internal load analysis of flexible rolling bearings for harmonic gear transmission. Mach. Des. Manuf. 1991, 1, 34–37. [Google Scholar]
- Sumith, S.; Gupta, A. Design and parametric study of flexible ball bearings: A finite element approach. Mater. Today Proc. 2022, 56, 257–262. [Google Scholar] [CrossRef]
- Pan, X.; Dong, S.; Mu, S.; Zhao, X. Research on load distribution and fatigue life of flexible bearings in harmonic drive after assembly deformation. J. Mech. Strength 2020, 42, 453–458. [Google Scholar]
- Xiong, Y.; Zhu, Y.; Yan, K. Load analysis of flexible ball bearing in harmonic reducer. J. Mech. Des. 2019, 142, 1. [Google Scholar] [CrossRef]
- Zhao, B.; Liu, Z.; Song, C.; Tian, L. Mechanics analysis on flexible thin wall bearing in harmonic transmission. Bearing 2002, 10, 1–3. [Google Scholar]
- Li, X.; Song, C.; Zhu, C.; Song, H. Load analysis of thin-walled flexible bearing in harmonic reducer considering assembly with flexspline and cam. Mech. Mach. Theory 2023, 180, 105154. [Google Scholar] [CrossRef]
- Sahoo, V.; Maiti, R. Evidence of secondary tooth contact in harmonic drive, with involute toothed gear pair, through experimental and finite element analyses of stresses in flex-gear cup. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 341–357. [Google Scholar] [CrossRef]
- Xin, H.; Mo, H.; Gao, J.; Wang, W.; Cui, D.; Liu, L.; Wang, T.; Xin, Y. Study on the gear tooth influence coefficients of flexspline of harmonic drive. Adv. Mater. Res. 2013, 774, 144–147. [Google Scholar] [CrossRef]
- Yao, Y.; Chen, X.; Xing, J. Tooth effects on assembling bending stress of flexible tooth rim in harmonic drive. Mech. Mach. Theory 2020, 150, 103971. [Google Scholar] [CrossRef]
- Trang, T.; Pham, T.; Hu, W. A quick stress calculation method for flexspline in harmonic actuators based on the finite element method. Cogent Eng. 2022, 9, 2138123. [Google Scholar] [CrossRef]
- Ivanov, M.N. Harmonic Drive Transmission; Shen, Y.; Li, K., Translators; National Defense Industry Press: Beijing, China, 1987. [Google Scholar]
- Dong, H.; Wang, D.; Ting, K. Kinematic effect of the compliant cup in harmonic drives. J. Mech. Des. 2011, 133, 051004. [Google Scholar] [CrossRef]
- Raja, M.; Iqbal, I.H.J.; Abidin, Z. Effect of bearing wear on linear and nonlinear responses of a rigid rotor supported by journal bearings. J. Mech. Sci. Technol. 2024, 38, 2741–2747. [Google Scholar] [CrossRef]
- Wu, M.; Han, X.; Tao, Y.; Pei, J. Lubrication reliability analysis of wind turbine main bearing in random wind field. Tribol. Int. 2022, 179, 108181. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Y.; Xing, J. A novel method based on mechanical analysis for the stretch of the neutral line of the flexspline cup of a harmonic drive. Mech. Mach. Theory 2014, 76, 1–19. [Google Scholar] [CrossRef]
- Yao, Y.; Chen, X.; Xing, J. Tooth position and deformation of flexspline assembled with cam in harmonic drive based on force analysis. Chin. J. Mech. Eng. 2021, 34, 104. [Google Scholar] [CrossRef]
- Chen, X.; Yao, Y.; Xing, J. Meshing stiffness property and meshing status simulation of harmonic drive under transmission loading. Front. Mech. Eng. 2022, 17, 8. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value | Units |
|---|---|---|---|
| n | Number of balls | 22 | / |
| z | Number of FS teeth | 200 | / |
| rm | FS neutral line radius | 24.450 | mm |
| rs | neutral line radius of FB outer race | 18.850 | mm |
| hs | thickness of FB outer race | 1.000 | mm |
| ω0 | The maximum radial deformation | 0.300 | mm |
| Pd | Radial clearance | 0.001 | mm |
| sf | root thickness of FS tooth | 0.410 | mm |
| rf | dedendum arc radius of FS tooth | 0.300 | mm |
| h0 | tooth rack thickness | 0.690 | mm |
| Part | Material | Elastic Modulus (MPa) | Poisson’s Ratio |
|---|---|---|---|
| FS | 40CrNiMoA | 209,000 | 0.295 |
| FB | GCr15 | 219,000 | 0.300 |
| Cam | 42CrMo | 212,000 | 0.280 |
| The ith Ball Load Qi | A1 | A2 | A3 |
|---|---|---|---|
| 10 | 33.9602 | 9.6640 | −10.2891 |
| 11 | 65.4500 | 15.5663 | −15.1118 |
| 12 | 70.0736 | 15.5621 | −6.2371 |
| 13 | 65.2366 | 15.5269 | −8.1775 |
| 14 | 34.9527 | 9.6516 | −1.2101 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, N.; Wang, J.; Wu, M.; Liu, H.; Tao, Y. Analysis of Flexible Bearing Load Under Various Torque Conditions. Machines 2025, 13, 627. https://doi.org/10.3390/machines13070627
Zheng N, Wang J, Wu M, Liu H, Tao Y. Analysis of Flexible Bearing Load Under Various Torque Conditions. Machines. 2025; 13(7):627. https://doi.org/10.3390/machines13070627
Chicago/Turabian StyleZheng, Nanxian, Jia Wang, Miaojie Wu, Huishan Liu, and Yourui Tao. 2025. "Analysis of Flexible Bearing Load Under Various Torque Conditions" Machines 13, no. 7: 627. https://doi.org/10.3390/machines13070627
APA StyleZheng, N., Wang, J., Wu, M., Liu, H., & Tao, Y. (2025). Analysis of Flexible Bearing Load Under Various Torque Conditions. Machines, 13(7), 627. https://doi.org/10.3390/machines13070627