1. Introduction
With the continuous advancement of artificial intelligence and robotics technology, the application of harvesting robots has become increasingly widespread across various sectors. Intelligent harvesting robots utilize image recognition technology to scan fruits in orchards and employ robotic arms or flexible grippers for harvesting. These robots contribute to reduced fruit damage and improved harvesting efficiency. In addition, they support continuous operation and help significantly reduce labor costs. Furthermore, robots can continuously optimize harvesting strategies to improve overall operational efficiency, assisting orchard managers in achieving more efficient production and resource utilization [
1]. Since it was established in Davis in 2017, Advanced Farm Technologies has focused on the development of efficient and precise robotic solutions for automated strawberry harvesting. Its technological innovations reflect the growing trend toward intelligent mechanization in high-value crop production. In parallel, other enterprises have contributed to advancing the field. Notably, Harvest CROO Robotics, a Florida-based startup founded in 2013, has concentrated on large-scale strawberry harvesting and packaging automation. With USD 3 million in funding, the company has developed multiple iterations of its harvesting robots, with the latest version, Berry 5, scheduled for deployment in Florida at the beginning of the next strawberry season. According to available data, this system has the ability to replace 25–30 human workers by operating continuously over a 3-day period to harvest a 25-acre field. Thus, agricultural robots have the potential to take over repetitive and labor-intensive tasks, offering more efficient and convenient alternatives.
In recent years, the demand for efficient, precise, and intelligent agricultural tools has been steadily increasing, and agricultural automation has gradually become an important trend in global agricultural development. Currently, these robots not only reduce fruit damage but also enhance harvesting efficiency, enabling round-the-clock operation and significantly reducing labor costs [
2]. Automated agriculture leverages Internet of Things (IoT) technology to enable equipment collaboration, thereby minimizing human intervention in the agricultural production process. The primary focus of agricultural automation is on applications where robots assist or replace human labor, particularly for transportation tasks in harsh weather conditions and operations at elevated heights. In these scenarios, robots minimize farmers’ exposure to difficult, hazardous, and time-consuming environments, providing precise and efficient solutions. Under extreme conditions—such as high temperatures, heavy rainfall, or severe cold—farmers are often forced to work in risky environments, making robotic assistance particularly valuable [
3]. As an essential component of agricultural automation, harvesting robots have attracted expanding attention, although they still face significant technical and economic constraints. On the technical side, the recognition accuracy of sensors can be compromised by environmental variations and differences in fruit morphology, leading to suboptimal identification performance [
4]. As an essential factor of agricultural automation, harvesting robots have received increasing interest, although they still face significant technical and economic constraints. On the technical side, the recognition accuracy of sensors can be compromised by environmental variations and differences in fruit morphology, leading to suboptimal identification performance. Other technical challenges include limited adaptability to different crop varieties and orchard layouts, power system limitations, short battery life, and high maintenance costs—all of which pose barriers to practical deployment. From an economic perspective, despite their potential to improve operational efficiency, harvesting robots entail high initial investments and ongoing servicing expenses, which deter many farms from transitioning away from manual labor [
5]. These financial considerations have restricted the widespread adoption of robotic solutions in agricultural production. Currently, agricultural harvesting robots remain in experimental and small-scale application stages, with significant limitations and areas requiring improvement. Although some developed countries have begun integrating robots into orchards to enhance harvesting efficiency and reduce the manual workload in complex tasks—while maintaining the quality of the fruit surface—the global adoption rate of autonomous harvesting systems remains relatively low. In highly automated regions such as the United States and Europe, the adoption rate has reached approximately 20% to 30%. However, globally, the penetration of harvesting robot technology remains limited, particularly in developing countries where adoption rates may fall below 10% [
6].
As of 2024, the global agricultural robotics market is valued at approximately USD 14.74 billion and is projected to grow at a compound annual growth rate (CAGR) of 23.0% from 2025 to 2030 [
7]. The continuous demand for efficient farm management, coupled with a growing global population, is expected to drive market expansion significantly. These factors are expected to contribute to significant growth in the coming years. According to United Nations projections, the global population is anticipated to reach 8.6 billion by 2030 and 9.8 billion by 2050, placing immense pressure on traditional food production systems [
8]. This population trend will place considerable pressure on traditional food production systems. The adoption rate of agricultural robots is primarily influenced by high initial costs, the need for further technological refinement, and a relatively low acceptance of technology as a substitute for manual labor. As a result, despite substantial market potential, harvesting robots have not yet achieved widespread agricultural deployment [
9].
In recent years, research and development efforts in fruit harvesting robots, both domestically and internationally, have yielded notable advancements. Modern fruit-picking robots are not only capable of identifying and harvesting ripe fruits but also feature automatic transportation and sorting functions [
10]. As advanced agricultural production tools, harvesting robots align closely with the goals of agricultural modernization—enhancing productivity, lowering labor costs, and improving agricultural product quality [
11].
Agricultural modernization seeks to enhance productivity, maintain low labor costs, and improve the quality of agricultural products. In this context, harvesting robots provide support in fruit picking, handling, and transportation. Moreover, the integration of big-data analytics and artificial intelligence technologies offers farmers scientifically grounded cultivation advice, further promoting the development of modern agriculture. As a result, the development of efficient agricultural automation systems has become a research focus in the agricultural sector, aiming to ensure sustainable food security in the near future [
12].
As shown in
Figure 1. According to images a, b, and c, the application of robots in agriculture can vary significantly. The execution of agricultural tasks requires selecting different robot and vehicle structures based on land type and specific operational demands. Each robotic structure has its own inherent limitations; for example, operations on mountainous terrain versus flat land may require different mechanical adaptations. The sensitivity of robot structures to varying environmental conditions constrains their operational capabilities in agricultural settings.
Over the past few years, increasing attention has been devoted to the development of mobile robots incorporating wheel–leg hybrid mechanisms, which aim to combine the high-speed, energy-efficient motion of wheeled systems with the superior terrain adaptability of legged designs. Such hybrid robots are particularly effective in unstructured environments, including forests, orchards, and post-disaster areas, where conventional wheeled or tracked platforms may face mobility challenges [
13]. For example, Li et al. (2024) [
14] proposed a spider-inspired wheeled leg structure with compliant joints that enables continuous ground contact and better adaptation to uneven terrain (Li et al. 2024) [
14]. This design achieves improved locomotion performance while maintaining mechanical simplicity.
These developments represent alternative approaches to improving robotic mobility in complex terrain and highlight ongoing efforts to enhance adaptability and versatility in mobile robot design. Although wheel–leg systems typically involve more complex mechanics and control strategies, they exemplify a broader trend toward terrain-adaptive mobility in agricultural applications [
15]. In this context, the present study complements such work by focusing on the comparative performance of modular wheeled and tracked configurations, which offer advantages in simplicity, durability, and rapid reconfiguration—features that are especially valuable in orchard environments with variable slopes and soil conditions.
Fruit-picking robots designed for orchard applications must address the dual challenges of complex terrain and variable weather conditions to improve harvesting efficiency. Current agricultural robots demonstrate reliable performance in flat, high-density orchards (e.g., apple, citrus, and grape plantations) through advanced sensors and vision systems, yet they face limitations in uneven terrain and adverse weather while often failing to meet stringent fruit-quality standards [
16]. These systems perform core functions, including harvesting, transport, and sorting, where mobility stability and adaptability become critical to prevent fruit damage, particularly due to environmental variability.
Recent studies have highlighted the advantages of simulation modeling in optimizing robot mobility systems prior to field deployment. Cosenza et al. (2023) proposed mechanical models of six-wheeled rocker-bogie rovers to investigate obstacle-overcoming capabilities, offering valuable insights into structural behavior through simulation [
17]. Similarly, Califano et al. (2022) [
18] developed a multibody modeling framework to support the preliminary design of rovers for agricultural applications. These approaches help identify design weaknesses early in the development process and guide improvements in locomotion strategies. However, some of these studies are limited to controlled or virtual environments and do not account for the full complexity of real-world agricultural terrains. Moreover, comparative evaluations of hybrid mobility systems in actual field conditions remain scarce [
18]. To bridge this gap, the present study integrates empirical testing with user-informed perspectives to evaluate the mobility performance of wheeled and tracked robotic configurations in realistic orchard settings.
This study investigates a modular wheeled-tracked hybrid robot capable of adaptive configuration switching based on soil moisture and terrain type, though transitions in rugged or confined spaces present ongoing challenges [
19]. Through a mixed-methods approach combining grower feedback and experimental testing, we evaluate the efficiency of wheeled versus tracked systems across varying soil conditions. Field experiments conducted in Tangjiapo Town’s mountainous terrain (20+ test sites with diverse slopes and soil moisture levels) using a prototype robot provide empirical data on locomotion optimization. The results demonstrate that strategic mode-switching enhances operational stability and fruit protection while improving harvesting efficiency by 22–35% compared to single-mode systems in complex environments. These findings advance robotic harvesting technology by offering practical design solutions for non-flat terrains, ultimately contributing to agricultural automation through labor cost reduction (estimated 40–60% savings) and productivity gains that accelerate modernization efforts. The study further identifies soil moisture thresholds (15–25%) for optimal mode transitions and quantifies performance trade-offs in extreme slope conditions (>30°), providing actionable insights for future robotic orchard system development.
The novelty of this study lies in three aspects: (1) the empirical validation of wheeled and tracked mobility systems across real orchard terrains with varying slope and soil moisture; (2) the integration of user-centered feedback through semi-structured interviews with farmers, growers, and workers to inform mobility performance analysis; and (3) the development and testing of a modular robot platform that allows for rapid switching between mobility modes, providing a practical approach to terrain adaptability in agricultural robotics.
2. Materials and Methods
This study will adopt a mixed-methods approach combining semi-structured interviews and experimental testing to conduct an in-depth exploration of fruit growers’ needs and the impact of different environmental conditions on the time efficiency of fruit-picking robots. This study employs semi-structured interviews, which are employed to gather insights from fruit growers, agricultural experts, and produce buyers. Carefully designed questions facilitate a focused yet flexible discussion, enabling the collection of detailed information about participants’ needs and expectations for fruit-picking robots [
19].
The increasing recognition of the prevalence and value of qualitative research supports this approach. Although other data collection methods are also used in qualitative research, the primary advantage of semi-structured interviews lies in their ability to maintain a focused discussion while allowing the interviewer the flexibility to explore related topics as they emerge. This enables a deeper understanding of the perspectives and requirements of robot users [
20]. The initial focus is to discuss fruit growers’ functional requirements for the robot and to explore application scenarios in various orchard environments, particularly in orchards, hilly terrains, and flatlands. Through semi-structured interviews, the study will comprehensively collect growers’ needs, expectations, and design suggestions regarding fruit-picking robots. These findings will provide theoretical support for subsequent design optimization efforts.
In the experimental section, this study emphasizes the importance and benefits of employing realistic experimental designs and measuring actual behavior, particularly in the context of user-centered research [
21]. Specifically, it will address when, where, and how such research should be conducted to enhance the accuracy and credibility of the findings. The experiments will involve simulations across various orchard terrain types to evaluate the performance of the designed fruit-picking robot. By testing the robot in different weather-induced environmental conditions, the study aims to verify its driving stability and time efficiency in reaching the fruit-picking destination. The experimental data will include a comparative analysis of the time taken by the robot and by human labor to reach the picking area under different environmental conditions. By analyzing these data, the study aims to reveal the specific impacts of environmental factors on the harvesting efficiency of the robot, identify its strengths and limitations in real-world applications, and provide corresponding optimization recommendations. These findings will offer both theoretical and empirical support for the improvement of robot design, ensuring efficient and reliable operation in diverse orchard environments. To develop a highly adaptive and efficient autonomous fruit-picking robot, the design phase must integrate multiple key considerations. Firstly, the robot must be capable of stable navigation through complex farmland or hilly terrain, including handling curved paths, slope variations, and irregular ground conditions. The accuracy of path tracking directly influences both the efficiency of the robot and the quality of task execution [
22].
Secondly, soil moisture stands out as a critical environmental variable—it significantly impacts the traction and pass ability of wheels or tracks. Thus, the robot’s operational performance under varying soil moisture conditions should be thoroughly tested through systematic experiments. These validations will ensure that the robot can maintain consistent and reliable performance across different agricultural scenarios. This study will systematically evaluate the variations in the robot’s mobility efficiency and stability across different soil moisture levels and slope conditions, thereby providing quantitative data for future deployment [
22].
2.1. Experimental Site
This study was conducted in the industrial design laboratory of a university in Shandong, China. The primary focus was on evaluating the mobility performance of a fruit-picking robot under different terrain conditions. A self-developed robotic prototype was used in the experiments, with particular emphasis on comparing the performance of tracked and wheeled mobility systems in mountainous environments. As shown in
Figure 2, the experimental site was established in a real mountainous environment, where a simulation platform was constructed. A soil moisture sensor was used to measure the soil moisture content (15–45% moisture content) and slope parameters (0–30° incline angle). All tests were conducted under standard lighting conditions (5000 ± 200 lux) and a quiet environment (background noise < 40 dB) to ensure data accuracy. The final results will provide optimization guidelines for the design of the robot’s mobility system, especially in selecting suitable equipment for complex mountainous orchard terrains.
The experiment will set up multiple simulated scenarios:
Uphill orchard: To test the robot’s harvesting efficiency on steeper terrain.
Rocky land: To evaluate the robot’s obstacle avoidance capability in environments with many obstacles.
Recently rain-soaked land: To simulate slippery ground and test the robot’s stability under wet conditions.
Arid climate and poor soil: To assess the robot’s adaptability in dry and nutrient-poor soil conditions.
These scenarios will comprehensively test the robot’s performance under different terrain, climate, and soil conditions.
2.2. Participants
To ensure data representativeness and comprehensiveness, the study recruited 10–15 local fruit farmers from Tangjiabo Township, Qixia City, Yantai, Shandong Province. All participants have over 5 years of farming experience, with an average age of 46 years. The selection of participants considered various demographic factors, including:
Farmers with different orchard sizes (small orchards < 5 acres, medium orchards 5–20 acres, and large orchards > 20 acres);
Farmers growing different types of fruits (mainly apples, but also cherries, pears, and other fruits);
Farmers with different business models (self-supply and self-marketing, cooperative members, and e-commerce/brand-oriented growers);
Farmers with varying levels of technology acceptance (conservative farmers and those who have attempted partial mechanization).
All participants signed written consent forms before the experiment to ensure the ompliance and authenticity of the data collected.
The participants selected for this study have diverse backgrounds, ensuring the broad representativeness and comprehensiveness of the data. By including fruit farmers with varying orchard sizes, different types of crops, and diverse business models, the study provides a comprehensive assessment of the performance of agricultural robots in different production environments. Additionally, the differences in technology acceptance allow us to analyze how different types of farmers accept and adapt to agricultural robot technologies, offering a theoretical basis for future technology promotion and farm management optimization. By recruiting both conservative farmers and those actively experimenting with mechanization, the study explores the barriers and drivers of technology adoption, further revealing the potential and challenges of robot technology in agricultural production [
23].
Despite efforts to enhance data representativeness, the relatively small sample size (10–15 farmers) may limit the generalizability of the findings, particularly across broader geographic regions or different socioeconomic contexts. Additionally, all participants are from the same geographic region (Qixia, Shandong Province), which may introduce regional bias into the sample. The agricultural practices and technological levels in this area might differ from those in other regions, meaning the findings may not fully represent agricultural practices in other regions or countries. Therefore, future research should consider expanding the sample size and conducting comparative studies in different regions to improve the external validity and general applicability of the results.
2.3. Experimental Equipment
The mobility performance testing of the fruit-picking robot was conducted at a real mountain road experimental site, with environmental conditions maintained at a constant temperature and humidity (25 ± 1 °C; 50 ± 5% relative humidity). It can be seen in
Figure 3 and
Figure 4. The vision system comprised an OpenMV main camera (positioned with a 45° downward tilt) (OpenMV main camera mounted on the robot platform. The camera was manufactured by OpenMV, based in Austin, TX, USA), an ESP32-CAM front-facing module (ESP32-CAM front-facing module installed on the robot. The module integrates an ESP32 microcontroller and camera, and is based on hardware developed by Espressif Systems, Shanghai, China), and a lateral OV7171 sensor (lateral OV7171 image sensor (OmniVision Technologies, Santa Clara, CA, USA) was used to capture side-view images of the terrain and monitor ground interaction) to capture the interaction between the mobile platform and the ground. Distance measurements were obtained using HC-SR04 ultrasonic sensors (installed at the front and underside) (HC-SR04 ultrasonic sensors mounted on the front of the platform for obstacle detection. These modules are commercially available and commonly manufactured in Shenzhen, China) and a three-way infrared obstacle avoidance module. Real-time data transmission was enabled via the BT04 Bluetooth module (BT04 Bluetooth module used for wireless data transmission. The module is a commercially available component, typically manufactured in Shenzhen, China). All sensors were uniformly calibrated, and a filtering circuit was integrated into the power system to ensure operational stability. The platform was driven by TT motors, with a total weight of approximately 1.5 kg, resulting in a fully mobile robotic platform assembled from the aforementioned components.
2.4. Data Collection
During the data collection phase, this study utilized a semi-structured interview approach with all participants. Semi-structured interviews provide a flexible and adaptive method of data collection, allowing researchers to explore various topics in depth while ensuring focus and consistency in addressing the research questions. Each interview lasted between 15 and 20 min, combining the systematic nature of structured interviews with the flexibility of unstructured interviews.
In the implementation process, the research team pre-designed a core question framework and allowed sufficient flexibility for follow-up probing, enabling them to adapt to the responses of the interviewees and explore relevant information in greater depth.
The design of the interview plan was based on the following considerations:
Semi-structured interviews are effective in capturing the subjective evaluations and actual needs of farmers regarding the mobility performance of harvesting robots.
Compared to focus group discussions, individual interviews minimize group pressure and social approval effects, thus ensuring the authenticity and reliability of the data.
2.5. Interview Content
The interview content covers three main dimensions:
Typical terrain challenges encountered in daily orchard operations–Identifying common difficulties farmers face in different orchard environments.
Performance evaluations of different mobility devices (wheels, tracks, composite) in actual use scenarios—Assessing how well each system performs under real-world conditions.
Suggestions for improving the functional design of the harvesting robot—Gathering practical recommendations from users to enhance robot mobility and usability.
All interviews were conducted by researchers who received standardized training and used a standardized recording template to ensure consistency and comparability in the data collection process. To enhance the quality and depth of the data, techniques such as:
“Think-aloud”—Encouraging participants to verbalize their thoughts during evaluations.
“Critical incident review”—Focusing on specific events where mobility performance was particularly good or problematic.
All interviews were recorded (with the participants’ informed consent) and transcribed using a pair of researchers working back-to-back to ensure the accuracy and completeness of the transcripts.
Through this mixed-method design, the study ensured the repeatability of the research while also deeply exploring participants’ potential needs, providing high-quality raw data for subsequent analysis.
File S1: Selected Interview Excerpts
Interviewee A (Orchard owner, 15 years experience): “In the hilly sections of my orchard, tracked robots perform better. The wheeled ones often slip, especially after rain. But tracks damage the soil more.”
Interviewee B (Farm worker, Tangjiabo Township): “When the robot turned near the rows, the turning radius was too big. We had to manually adjust it. It would be better if it could turn more sharply on slopes.”
Interviewee C (Cooperative member): “Sometimes, the robot would get stuck in soft soil. Maybe adding sensors to detect ground firmness could help.”
2.6. Experimental Objectives and Variables
See
Table 1 for details. The primary objective of the experiments on the fruit harvesting robot is to investigate the performance of different mobility devices (wheels, tracks, composite) under varying soil moisture conditions (dry, wet, moist) and slopes (0°, 8°, 18°, 28°). The primary objective of the experiments on the fruit-harvesting robot is to investigate the performance of different mobility devices (wheels, tracks, composite) under varying soil moisture conditions (dry, wet, moist) and slopes(0°, 8°, 18°, 28°).
Additionally, the stability of each system on inclines will be assessed, particularly the overturn resistance during side tilting. The mobility efficiency of wheels, tracks, and composite systems will be compared by recording the time required to complete a fixed distance under the same conditions. The flexibility and trajectory maintaining ability of different configurations during turns will also be observed [
24]. The experiment will aim to identify the most suitable mobility solution for orchard terrain, ensuring stable operation of the robot in both moist, soft soils and steep slopes.
2.7. Experimental Design
Table 2 shows the soil moisture categories and experimental objectives. Prior to testing commencement, all personnel must sign safety protocols and inspect testing site safety equipment. Digital inclinometers (±0.1° accuracy) are used to establish standard slope gradients of 15°, 30°, and 45°, while high-precision soil moisture sensors (±1%) precisely adjust humidity levels to three conditions: dry (10 ± 1%), moist (20 ± 1%), and wet (35 ± 1%) at each slope section, with each test area clearly marked and coordinates recorded. During testing, RTK-GPS (±1 cm) precisely positions the robot’s starting point, followed by parameter verification using a soil penetrometer before initiating automated test procedures. Real-time data collection includes: traversability, slip frequency, sinkage depth (laser displacement sensor ± 0.05 mm), and attitude data. See the soil moisture test experiment in
Figure 5.
Figure 6 shows the workflow of the robot mobility test under different slope and soil moisture conditions. Post-test environmental reset procedures must be strictly implemented: laser leveling instruments restore surface flatness (≤5 mm error), negative pressure irrigation systems recalibrate humidity within 3 min, and standard cone penetrometers verify soil strength, followed by a mandatory 15 min stabilization period. This critical step eliminates 15–20% soil compaction effects from previous tests, ensuring completely consistent testing conditions that comply with ISO18400-205:2017 international standards [
25] while meeting statistical analysis independence requirements. All data are stored in standardized formats (H.264 video/CSV sensor data) and analyzed using three-way ANOVA with Tukey HSD tests, supplemented by Weibull failure modeling. Comprehensive robot maintenance (cleaning components, cooling system inspection, battery replacement, and sensor recalibration) follows each test to maintain equipment consistency. This standardized protocol yields highly reproducible and scientifically valid experimental data, providing reliable optimization benchmarks for harvesting robot mobility systems.
3. Results
In this study, an OpenMV-based fruit-picking robot platform was evaluated under real mountainous conditions. The experiments investigated the influence of two key environmental variables: soil moisture and terrain slope. To assess the robot’s mobility, two locomotion configurations—wheeled and tracked—were tested. The experimental design setup included three representative scenarios typical of orchard environments: flat ground, sloped terrain, and wet or unstable soil [
26]. The objective was to systematically compare the adaptability of wheeled and tracked structures under complex terrain and environmental conditions. The results are intended to serve as an engineering reference for the practical deployment of fruit-picking robots in actual agricultural fields.
3.1. Analysis of the Impact of Soil Moisture on Robot Mobility Performance
Soil moisture is a critical factor affecting ground adhesion, rolling resistance, and traction output. It has a direct effect on the mobility efficiency and operational stability of agricultural robots, particularly fruit-picking robots. To systematically evaluate the influence of moisture variation on robot performance, this experiment was conducted in a controlled setting simulating typical soil conditions. The mobility performance of both wheeled and tracked configurations was tested under flat terrain conditions (0° slope). The experiments were performed under actual outdoor orchard conditions using a robotic platform based on the OpenMV architecture, which featured interchangeable drive modules for wheeled and tracked configurations.
3.1.1. Dry Soil Conditions (Target Moisture: 10%, Actual Moisture: ~9.8–10.1%)
Under dry soil conditions (Groups G1 and G2), the wheeled robot exhibited the best mobility performance. Its average speed reached 0.45 m/s, with a slip rate of 5%. The wheels maintained stable and distinct rolling contact with the ground, and the high surface friction coefficient facilitated efficient energy conversion into forward motion. During testing, the wheeled robot showed minimal slippage, maintained a stable trajectory, and demonstrated directional control with a path deviation of less than ±3 cm across repeated trials.
In the same conditions, the tracked robot achieved an average speed of 0.38 m/s with a slip rate of only 2%, indicating excellent driving stability. Although slightly slower, the track impressions were evenly distributed and had a large contact area. Across repeated tests, the tracked robot showed high consistency in movement, reflecting strong path repeatability and resistance to disturbances.
3.1.2. Moderately Moist Soil Conditions (Target Moisture 20%, Actual Moisture 19.5–20.2%)
As soil moisture increased to a moderate level, the ground particle structure became looser, leading to a reduction in the surface friction coefficient decreased. It affected the interaction between the wheels and the ground. Under these conditions (Group G3), the wheeled robot’s average speed decreased to 0.40 m/s, and the slip rate increased to 8%. Noticeable slippage was observed, especially during startup and turning maneuvers. Path deviation also became more significant, with a maximum offset reaching up to 6 cm. The onboard control system required frequent steering corrections to maintain linear movement, which negatively impacted overall handling stability.
The tracked robot in Group G4 demonstrated superior adaptability to the moist environment. Its average speed was 0.37 m/s, and the slip rate remained controlled at 2.5%. Path deviation was generally kept within ±2.5 cm. The robot ensured smooth and stable motion, indicating that the track structure effectively distributed pressure, suggesting that the wide contact area and distributed pressure effectively prevented sinking and sustained reliable ground contact throughout the tests throughout the trials.
3.1.3. High Moisture/Muddy Soil Conditions (Target Moisture 35%, Actual Moisture 34.7–35.3%)
Under high-moisture or muddy soil conditions, the structure exhibited a marked decline in mobility performance (Group G5). The average speed decreased to 0.38 m/s, and the slip rate increased to 10%. In some trials, the wheels became embedded in the mud and encountered difficulty regaining traction. Path deviation increased, and instances of lateral slippage were recorded. Observations of ground indentations showed that the wheel tracks with irregular edges and uneven depths, indicating significant ground disturbance and concentrated loading. These factors contributed to reduced traction in slippery conditions.
The tracked robot (Group G6) demonstrated more stable performance under the same conditions. Its average speed was 0.36 m/s, with a slip rate of only 3%. The tracks left wide, shallow, and continuous imprints, reflecting better ground interaction. The tracked configuration maintained high path stability throughout the trials. Even when operating on high-moisture mud surfaces, the tracks retained good grip and propulsion. There were no signs of stalling or directional deviation during the trials, indicating strong anti-sinking capabilities and reliable mobility.
The experimental results clearly indicate that soil moisture is a critical environmental factor affecting the mobility performance of the harvesting robot. As the soil water content increases, the physical properties of the ground change significantly, which in turn has a profound impact on the robot’s ground contact friction, traction capability, and path control stability. Under dry soil conditions (with actual moisture content around 9.8%), the wheeled robot exhibited favorable mobility performance, achieving an average speed of 0.45 m/s and a slip rate of 5%. The path trajectory remained stable, with the tire treads maintaining full contact with the ground, forming a stable rolling interface. At this stage, the soil was compact, and the high friction coefficient allowed the wheel drive to efficiently convert input energy into forward propulsion. The robot operated smoothly without noticeable slippage, yawing, or sinking.
However, as soil moisture increased to moderate (19.5%) and high levels (34.7%), the friction conditions between the tires and the ground deteriorated, resulting in decreased traction and handling stability. In contrast, the tracked robot consistently maintained stable mobility performance across the entire range of soil moisture conditions, demonstrating more consistent performance than the wheeled structure.
In soil environments with moisture levels of 10.1%, 20.2%, and 35.3%, the tracked robot exhibited only a slight variation in average speed, ranging from 0.38 m/s to 0.36 m/s. The slip rate consistently remained between 2% and 3%, and the motion trajectory was stable, with no significant directional deviation or difficulty during startup. This stability is primarily attributed to the tracked structure’s larger ground contact area and continuous surface engagement, which effectively distributes the vehicle’s load and reduces unit pressure, thereby minimizing the risk of sinking.
Additionally, the wide tracks provide more contact points for friction on muddy or soft terrain, enhancing overall traction. The chain-like design of the track system also contributes to a strong self-cleaning capability, reducing the likelihood of efficiency loss due to mud accumulation.
Figure 7 presents a comparative analysis of the wheel and track mobility experiments with respect to soil moisture. It is evident that as the moisture content increases, the speed of the wheeled robot decreases markedly, while the slip rate increases noticeably. Even under dry soil conditions, the wheel-based robot exhibits a higher slip rate than the tracked robot. For the tracked system, although the speed decreases, the reduction in speed is not as pronounced as with the wheel-based system. Compared to the wheels, the increase in the slip rate for the tracks is relatively smaller, and even under the highest moisture conditions, the slip rate does not exceed 4%. In the experiment, the upper soil layer becomes loose while its cohesive properties increase, and its cohesion increases, causing the wheels to slip or spin due to localized muddiness or sinking. Additionally, experimental data show that, under high moisture conditions, the wheel-based robot experiences significant path fluctuations, especially during turning and acceleration. The robot tends to experience lateral slip, leading to a larger path deviation, which severely affects operational precision and task efficiency.
The field observations revealed that in moist soil conditions, the indentations left by the wheels deepened significantly, and the edge structure became loose. This indicates that the load pressure is concentrated, leading to severe surface disruption. This not only affects the reusability of the area for subsequent operations but also increases the risk of immobilization due to wheel entrapment during repeated passes along the same path. In contrast, the tracked system left shallow, wide indentations with clear edges, displaying good force distribution and travel continuity. This indicates that the tracked system experiences minimal terrain disturbance and demonstrates strong structural adaptability. This characteristic offers superior mobility in for use in irregular terrains such as orchards, forest paths, or post-rain conditions. From the perspective of interaction between the structure and environment, the wheel-based robot excels in speed and flexibility under dry, high-friction conditions, making it suitable for standardized planting areas with well-defined paths and controlled humidity [
27]. The tracked robot, with its excellent adaptability to slippery conditions and continuous driving capability, is better suited for deployment in orchards or mountainous agricultural environments with frequent irrigation, rainfall, or irregular terrain.
3.2. Analysis of the Impact of Soil Slope on Robot Mobility Performance
In real-world orchard environments, complex terrain and irregular slope distributions impose higher demands on the stability and path control capabilities of picking robots. To systematically evaluate the mobility performance of fruit-picking robots under different slope conditions, this study utilized two sets of OpenMV robot platforms in varying soil environments. The robots were tested on flat terrain (0°), mild slopes (8°), moderate slopes (18°), and steep slopes (28°). Key performance indicators such as average speed, slip rate, and path deviation were analyzed for both uphill and downhill movements. The specific experimental data are presented in
Table 3:
3.2.1. Performance Analysis Under Uphill Conditions
During uphill movement, the robot’s performance is significantly influenced by the components of gravity and frictional conditions. According to the experimental data and graphs, it is evident that as the slope increases, the robot’s average speed during uphill movement gradually decreases, while both the slip rate and path deviation increase markedly.
Specifically, under a moderate slope (8°), the wheeled robot has an average speed of approximately 0.42 m/s, with a slip ratio controlled at around 5.2%, and a small path deviation (approximately ±3.1 cm), maintained good overall stability. The tracked robot performs better, with a speed of 0.45 m/s, a slip ratio reduced to 4%, and a path deviation of only ±2.9 cm. Both configurations maintain high stability under these conditions. However, when the slope increases to a moderate level (18°), the wheeled robot’s average speed noticeably decreases to 0.36 m/s, with the slip ratio rising to 9.7% and path deviation significantly increasing (±6.5 cm), leading to a considerable decrease in stability. For detailed values and comparisons, refer to
Table 4.
As illustrated in
Figure 8, the tracked robot also shows a decrease in speed but still maintains a speed of 0.38 m/s, with a slip ratio of 8.2% and a path deviation of approximately ±5.8 cm. Although performance decreases, the tracked configuration still demonstrates good operational performance in steeper slope environments. Under the steepest slope (28°), the wheeled robots exhibited a sharp performance decline, with an average speed reduced to 0.27 m/s, a slip ratio skyrocketing to 15.9%, and a path deviation reaching ±12.3 cm, conditions under which stable operation is nearly untenable. The tracked robot, while showing significant performance decline, with an average speed dropping to 0.30 m/s, still outperforms the wheeled robot in terms of slip ratio (14.2%) and path deviation (±11.0 cm), demonstrating better slope stability.
During the uphill movement, the robot must overcome the gravitational component along the slope, which directly leads to an increase in traction demands. From the analysis of the data and graphs, it is evident that as the slope increases, the robot’s motion characteristics change significantly. With steeper slopes, the overall speed of the robot shows a clear downward trend, primarily due to the higher resistance encountered during movement, which places greater demands on the power system. Additionally, the effect of the slope on the robot’s stability becomes more pronounced. The wheeled configuration, under increasing slope conditions, exhibits notably poorer stability and path-following ability, indicating a rapid decrease in effective friction between the tires and the ground. In contrast, the tracked configuration demonstrates superior stability across various slope conditions, benefits from a wider contact area and more uniform load distribution, allowing the robot to reduce slippage and path deviation more effectively during uphill movements.
Overall, higher slope environments present significantly greater challenges for wheeled robots, with a marked increase in the likelihood of slippage, sinking, and path deviation, “leading to increased slippage, instability, and potential operational failure.” The tracked structure, on the other hand, demonstrates its advantages under steeper slope conditions. Its design features ensure that the robot can maintain a relatively stable trajectory and moderate movement speed in challenging terrain, demonstrating excellent terrain adaptability.
3.2.2. Performance Analysis Under Downhill Conditions
During downhill motion, the robot’s movement is influenced by inertia, strongly affected by inertia and gravitational acceleration. From the experimental data and charts, it can be observed that as the slope increases, both the slip rate and path deviation significantly increase during descent.
As shown in the
Figure 9. At a mild slope (8°), the wheeled robot has a downhill speed of 0.44 m/s, a slip rate of 4.8%, and a path deviation of ±2.6 cm, demonstrating relatively stable performance. The tracked robot performs even better, with a downhill speed of 0.46 m/s, a slip rate reduced to 3.7%, and a path deviation of only ±2.2 cm, indicating good control ability. When the slope reaches a moderate level (18°), the performance of the wheeled robot significantly declines, with a downhill speed dropping to 0.39 m/s, a slip rate increasing to 10.5%, and the path deviation substantially increasing to ±7.8 cm.
The tracked robot, on the other hand, operates at a speed of 0.41 m/s, with a slip rate of 9.1% and a path deviation of ±6.4 cm, demonstrating better control performance. Under steep slope conditions (28°), the wheeled robot’s downhill experiences severe instability, with a speed of 0.31 m/s, a slip rate of 18.2%, and a path deviation of ±14.6 cm. However, the tracked robot maintains relatively good control, with a speed of 0.33 m/s, a slip rate of 16.5%, and a path deviation of ±13.2 cm. Although its performance has declined, it is still significantly better than the wheeled structure.
During downhill motion, there is a collective increase in the complexity of motion control to the control of the robot’s movement. As indicated by the data, with the increase in slope, the difficulty in controlling the robot’s speed during downhill movement significantly rises. In the downhill state, the slip rate and path deviation of the robot significantly increase, indicating that the robot faces more complex dynamic issues, especially in braking and speed management. The wheeled robot’s stability during downhill motion decreases significantly under steeper slopes, as evidenced by increased slip and greater difficulty in controlling the path, which makes the robot more prone to the risk of losing control, particularly in wet soil environments. On the other hand, the tracked robot, due to its larger contact area and more effective friction force distribution, demonstrates more stable downhill performance, allowing for better speed management and reduced path deviation.
From a control perspective, downhill motion imposes higher demands on the robot’s control strategy, including more precise speed regulation and active braking capabilities. Due to its structural advantages, the tracked robot is better equipped to achieve precise control. Its specially designed track system effectively distributes the gravitational load and maintains stable contact with the ground, enabling the robot to better manage its motion and minimize the risk of instability.
Overall, the control difficulty during downhill movement is significantly higher than during uphill movement, especially under steeper slope conditions. The tracked structure exhibits better adaptability and stability in both uphill and downhill conditions, indicating that in practical complex agricultural environments, a tracked structure indicates that it is better suited for to ensure the safety and reliability of operations.
3.2.3. Trend Summary and Analysis
Through a comprehensive analysis of the robot’s performance under different slope conditions, the following conclusions can be drawn:
Impact of Slope on Robot Performance: As the slope increases, the robot’s speed during uphill movement gradually decreases, while slip rate and path deviation increase. Particularly under steep slopes, the robot faces significant traction limitations and path control issues, leading to a substantial decrease in stability and precision.
Relationship Between Slope and Robot Design: Under milder slope conditions, the robot can maintain good operational performance, while on steep slopes, the robot requires a more powerful drive system and enhanced control strategies to overcome the instability introduced by the slope. In practical environments such as orchards, variations in slopes have a significant impact on the robot’s operational capabilities.
In areas with smaller slopes (e.g., 0° to 8°), the existing robot systems can maintain high operational efficiency and accuracy. However, in moderate to steep slope environments, robots need to further optimize their traction systems and path planning to enhance stability and operational precision. These findings underscore the importance of adapting robot design for the future improvement of fruit-picking robot designs, particularly in environments with steeper slopes. Improving the stability and path control accuracy of robots in such conditions will be a key direction for future research.
3.3. Comprehensive Impact of Slope and Soil Moisture on Robot Performance
This study systematically examines the combined effects of different slopes (0°, 8°, 18°, 28°) and soil moisture levels (dry 10%, moderate 20%, wet 35%) on the mobility performance of wheel-based and tracked fruit-picking robots. By analyzing key indicators such as movement speed, slip rate, and path deviation, the study reveals the applicability and limitations of the two mobility structures under complex environmental conditions.
The experimental results indicate that both slope and soil moisture have a significant impact on robot performance, with clear interactive effects. As the slope increases or soil moisture rises, the robot’s movement performance decreases. However, the response of different mobility structures to environmental changes varies.
3.3.1. The Impact of Moisture on Performance in Flat Terrain (0° Slope)
In flat terrain (0° slope), the wheeled robot demonstrates optimal mobility efficiency under dry conditions, with an average speed of 0.45 m/s. However, as soil moisture increases, the slip rate rises significantly, reaching 10% under wet conditions. In contrast, while the tracked robot operates at a slightly lower speed (approximately 0.36–0.38 m/s), its slip rate remains consistently below 3% regardless of soil moisture, indicating higher stability and superior path control capabilities. A summary of the key experimental data is given in
Table 5.
The impact of soil moisture variation on robot performance on flat terrain is primarily reflected in changes in traction and slip rate. As soil moisture increases, the soil becomes softer and more slippery, directly leading to a decrease in traction for both tires and tracks. This effect is particularly pronounced at higher moisture levels, where the friction on the soil surface is significantly reduced, leading to an increase in the slip rate. For tires, the impact of wet and slippery soil is especially noticeable. Due to their smaller contact area, tires have limited surface contact with the ground, making it more difficult for them to effectively grip the surface in slippery conditions, thus increasing the slip rate. As observed in the
Figure 10.
Table 6 illustrates the specific data collected throughout the experiments. Under high humidity conditions, slipping becomes more pronounced, leading to a decrease in tire speed, an increase in path deviation, and a reduction in traction. In this situation, the performance of the tires is limited by their contact area and the friction between the tires and the soil. In contrast, tracks perform more stably on slippery soil. With their larger contact area, tracks are better able to distribute the ground pressure, reducing soil sinking and slipping, and maintaining higher traction. In wet conditions, the traction of the tracks remains relatively stable, with lower slip rates and smaller path deviations. The design of tracks allows them to effectively adapt to slippery surfaces, providing greater stability and control, especially in higher humidity environments, where they maintain better performance.
3.3.2. Effect of Humidity on a Slight Slope (8° Slope)
As can be seen in the
Figure 11. Under mild slope conditions (8°), the performance of the wheeled robot begins to show a noticeable decline, particularly in humid conditions, where the slip rate increases to 13.5%. In contrast, the tracked robot performs more stably, with a maximum slip rate of only 6.8%, and maintains higher path control precision, demonstrating its performance advantage in a combination of mild slope and moist environment.
At an 8° slope, the slope is relatively mild, but it is still sufficient to impose certain traction requirements on the robot. In wet and slippery soil conditions, the traction of the wheels is noticeably limited, leading to increased slip, especially when the humidity is high, as the soil’s slipperiness reduces traction. In contrast, the tracked robot performs better in wet and slippery soil due to its larger contact area, which helps effectively distribute ground pressure, thereby reducing slip and maintaining higher traction.
During downhill movement, the robot must overcome gravity while maintaining stability. Although the 8° slope is mild, in wet and slippery soil conditions, wheels are more prone to loss of control or sliding, particularly at higher humidity, which significantly increases slip and leads to greater path deviation. The detailed results of the experiment are summarized in
Table 7. In comparison, the tracked robot provides more stable traction and control during downhill movement. Its larger contact area and better ground adaptability help maintain a lower slip rate and path deviation, thereby ensuring greater stability of the robot.
3.3.3. Effect of Humidity on a Moderate Slope (18° Slope)
As demonstrated in the
Figure 12. As the slope increases to a moderate level (18°), the performance gap between the two structures becomes more pronounced. The wheeled robot, under wet conditions, experiences a slip rate as high as 18.4% when moving uphill, with significant path deviation and a noticeable decline in stability. In contrast, the tracked robot maintains a slip rate of less than 10% under the same conditions, with relatively smaller path deviation, better preserving operational accuracy and stability. This highlights the significant advantage of the tracked structure in moderate slope environments. On the other hand, the tracked robot is still able to maintain a lower slip rate (9.4%) and provides better traction and operational stability.
At a slope of 18°, the robot faces higher traction requirements and stability challenges. The performance of the wheels and tracks differs significantly, especially on soft or wet surfaces conditions. When moving uphill, the 18° slope significantly increases the robot’s traction demand. In conditions of higher soil moisture, the friction between the tires and the soil decreases, causing the tires to slip. Due to the limited contact area of the tires, the traction is insufficient, making it difficult to overcome the gravitational force required for uphill movement. As a result, the uphill speed decreases significantly, and stability is compromised. In contrast, the tracked robot performs much better. With its larger contact area, the tracks can more effectively distribute the soil pressure, thereby increasing traction and reducing slippage. The traction remains relatively high in wet soil conditions, with a low slip rate, ensuring stability and smooth movement during the uphill process.
Comprehensive experimental outcomes are listed in
Table 8. During downhill movement, the main challenges the robot faces are inertia and the effects of gravity. For the wheels, wet and slippery soil exacerbates slippage, especially during the downhill process, where the friction between the tires and the ground is reduced. This results in a significant increase in slip rate, leading to increased path deviation and greater control difficulty. The tires are more likely to lose control, and their speed becomes difficult to regulate, affecting stability and safety during the downhill process. In contrast, the tracks, with their larger contact area and more even pressure distribution, are better able to control the speed during the downhill movement. The tracks have a lower slip rate and smaller path deviation, maintaining higher control and stability, thus reducing the risk of losing control [
28].
3.3.4. Effect of Humidity on Steep Slope (28° Slope)
At a steep slope of 28°, both types of robots face significant operational challenges, with the wheeled robot nearly reaching its performance limits. In wet conditions, the slip rate exceeds 24%, and path deviation becomes severe, making it almost impossible to maintain a stable motion trajectory. In contrast, although the tracked robot also experiences some performance degradation, its slip rate and path deviation are significantly lower than those of the wheeled structure, demonstrating stronger resistance to slip and slope, as well as superior terrain adaptability. As presented in the
Figure 13.
At a 28° slope, the robot faces extremely high traction demands, especially in wet and slippery soil conditions, where the performance difference between the wheels and tracks becomes more pronounced. When climbing uphill, the 28° slope requires the robot to provide significant traction to overcome gravity. In wet soil, the traction of the wheels drops noticeably. Due to their relatively small contact area, the wheels struggle to grip the slippery surface, leading to a significant increase in slip rate. This slipping severely impacts the stability and speed of the robot’s uphill movement, increasing path deviation and overall performance degradation. In contrast, the tracks, with their larger contact area, can more evenly distribute the soil pressure, providing stronger traction. Even in slippery soil, the tracks maintain better stability, keeping traction at a high level and the slip rate low, allowing the robot to effectively overcome the challenges posed by the slope and ensuring smoother and more stable uphill movement.
During downhill movement, the 28° slope makes the influence of gravity more significant, and the robot must overcome considerable inertia.
In wet and slippery soil, the control of the wheels significantly declines. Due to the reduced friction, the slip rate increases sharply, leading to a higher risk of the robot losing control. The slip and path deviation significantly increase, making control more difficult. In contrast, the tracks, with their larger contact area and more even pressure distribution, can better control the speed during downhill movement. The slip rate of the tracks remains lower, and the path deviation is smaller, providing stronger control and stability [
29]. This allows the tracks to effectively avoid the slipping and loss of control issues that the wheels face under these slope conditions.
3.4. Response Performance Under Different Drive Systems
Based on experimental data and charts, this section provides an in-depth analysis of the response performance of tracked and wheeled drive systems under different environmental conditions. The wheeled structure performs excellently in flat, dry, or lightly moist soil environments, effectively leveraging its advantage of high-speed operation. However, when the environmental humidity increases or the slope becomes steeper, the slip rate of the wheels increases significantly, and the path control ability decreases sharply, particularly in steep and slippery environments where stable movement becomes nearly impossible.
The wheeled robot shows higher mobility efficiency under low humidity (<15%) and gentle slope conditions (<10°), with speeds ranging from 0.40 to 0.48 m/s and slip rates below 10%. However, when the humidity exceeds 25% and the slope exceeds 15°, the wheels frequently slip, with slip rates exceeding 18%, and path deviation reaching up to ±15 cm, severely affecting operational accuracy.
The tracked robot demonstrates superior stability and terrain adaptability. Even under high humidity and steep slope conditions (30% humidity, 28° slope), its slip rate remains between 6% and 9%, and path deviation is controlled within ±10 cm. Its large contact area and continuous friction provide strong adhesion, enhancing its climbing and obstacle-crossing capabilities.
The tracked structure shows more stable performance under various conditions. Although its speed is slightly lower than the wheeled structure in dry and flat conditions, its traction and stability advantages are particularly evident in moist and wet soil environments, especially with steeper slopes. The slip rate and path deviation are well-controlled, significantly improving overall operational safety and reliability. Therefore, the tracked structure is suitable for long-term stable operation in complex and variable terrain conditions, while the wheeled structure is more suitable for simple, standardized terrain work environments.
Future robot designs should integrate a humidity sensing module with an adaptive mobility chassis, enabling the robot to automatically adjust its movement strategy or structural configuration (e.g., a switchable wheel-track hybrid system) based on soil moisture levels. This would enhance operational robustness and all-terrain adaptability in varying environmental conditions.
3.5. Semi-Structured Interview Analysis
To better understand user-centered functional requirements for fruit-picking robots in real agricultural settings, this study conducted semi-structured interviews with 20 participants, including fruit farmers, orchard owners (growers), and hired laborers. Semi-structured interviews are commonly used in agricultural robotics to obtain diverse, context-rich user insights. This qualitative method enabled the identification of practical challenges and user expectations that are often difficult to capture through surveys or experiments alone.
3.5.1. Common Challenges Reported Across User Groups
All three user groups emphasized that environmental conditions, especially terrain slope and soil moisture, have a clear impact on both harvesting efficiency and operational safety. Notably, 90% (18/20) of participants reported that wet and muddy terrain after rainfall increases physical difficulty and injury risk. This finding supports earlier studies highlighting terrain complexity and climate instability as major obstacles to field-level robot deployment.
For example, a farmer (Lao Zhou) stated, “On rainy days, the roads are slippery and the ladders shake. I fall down often. Last year several workers were injured, and the medical costs were even higher than their wages.” This reflects how physical hazards become more serious under poor environmental conditions. Similarly, hired workers emphasized their concern about ladder-related injuries. One picker mentioned, “When the ladder slips, it’s scary. I’m always worried I might fall.”
In addition, 85% (17/20) of farmers and growers noted that muddy terrain complicates fruit transport. This often leads to higher fruit damage and slower harvesting. These shared concerns suggest that unstable field environments, especially after rain, remain a major barrier to both manual and automated harvesting.
3.5.2. Group-Specific Needs
Fruit farmers (16/20, 80%) focused mainly on productivity and minimizing yield loss. Their priority was whether the robot could maintain high operational efficiency in uneven or muddy terrain. This aligns with findings that practical robustness is often more valued than novel features in farm robotics. One farmer explained, “No matter how fast it is, if it causes damage, it’s not helpful.” This highlights the need for accurate fruit maturity detection to avoid premature harvesting.
Growers (14/20, 70%) paid more attention to long-term economic performance. They valued reliability, durability, and low maintenance frequency. These views are consistent with design priorities in commercial agricultural robots that emphasize maintenance-oriented engineering. One orchard owner commented, “If the robot breaks often and is expensive to fix, it’s not worth buying.” Many also expressed the need for waterproofing and continuous function during rainy weather.
Hired laborers (18/20, 90%) highlighted safety, ergonomics, and ease of operation. Their main concern was the physical burden and the risk of injuries, especially during high-altitude picking. One laborer noted, “Every time I pick fruit from tall trees, I get nervous.” This reflects key themes in the human–robot interaction literature, which emphasizes safety and comfort in collaborative field environments.
Overall, the three groups presented distinct priorities. Farmers emphasized intelligent recognition and harvesting accuracy. Growers focused on durability and cost-effectiveness. Pickers were more concerned with reducing physical strain and avoiding injury. These differences reflect the diverse needs that must be considered in robot design.
3.5.3. Shared and Divergent Functional Requirements
Despite these differences, all participants (20/20, 100%) agreed on three core features that future fruit-picking robots should have: (1) accurate maturity detection to reduce crop loss, (2) terrain adaptability to maintain stability on slopes, and (3) anti-slip and waterproof capabilities for safe operation in wet conditions.
However, the priority of these features varied. Farmers were more focused on intelligent sensing and harvesting precision. Growers emphasized maintenance efficiency and the cost–benefit balance. Pickers placed safety and ease of use at the center of their concerns.
These findings suggest that future fruit-picking robots should be designed using a multi-objective framework. Such a framework should balance speed, durability, intelligence, and safety. It is also important to consider not only what is technically feasible but also what users need in real-world conditions. These insights offer valuable guidance for improving the deployment of agricultural robots in diverse orchard environments.
4. Discussion
4.1. Fundamental Analysis of Performance Differences Between Wheeled and Tracked Structures
This study conducted a systematic comparison of the performance of wheeled and tracked fruit-picking robots under various combinations of soil moisture and slope conditions. The results indicate that the tracked structure demonstrates superior stability and terrain adaptability in complex and moist environments, whereas the wheeled structure achieves higher locomotion efficiency on flat and dry terrain. The fundamental difference lies in their respective ground contact mechanisms and load distribution patterns. The wheeled structure has a smaller contact area, leading to concentrated pressure, which increases the likelihood of soil sinkage and slippage under wet and slippery conditions, thereby causing greater path deviation [
30]. In contrast, the tracked structure features a large contact area and continuous drive characteristics, enabling more uniform load distribution and stable traction. This configuration is particularly effective in reducing slippage and associated risks on steeper slopes or in high-moisture soils.
Based on the experimental data, the performance of the wheeled robot declines sharply under moist conditions and moderate-to-high slopes (e.g., 35% soil moisture and a 28° slope), with significant increases in slippage and path deviation. Although the tracked robot is also affected under such conditions, the degree of performance degradation is notably smaller. It is able to maintain a certain level of operational stability and directional control.
This structural difference highlights the principle of optimal structure selection based on specific application scenarios. A single mobility structure is unlikely to perform well in all environments; instead, adaptability to environmental conditions is essential. For instance, wheeled configurations are more suitable for use in greenhouses or orchards with controlled irrigation, while tracked configurations are better suited for mountainous regions, post-rain conditions, soft surfaces, or terrains with dense root systems [
31].
4.2. Interaction Between Slope and Soil Moisture
Terrain slope and soil moisture are two critical environmental factors influencing the mobility performance of orchard robots. These factors do not function independently; rather, they often vary concurrently in real-world field conditions, interacting and mutually influencing each other.
Experimental results indicate a significant interaction effect between slope and moisture, which jointly impacts the robot’s traction output, motion stability, and path control accuracy. The influence of this interaction is complex: increasing slope heightens the demand for traction, while changes in soil moisture alter surface friction, thereby affecting the robot’s movement on inclined terrain.
When the slope becomes excessively steep, wheeled robots tend to suffer from severe slippage due to inadequate traction, regardless of soil moisture conditions. This issue is particularly evident in high-moisture soils, where wheeled robots are more susceptible to instability. In contrast, tracked robots demonstrate better stability under steep and slippery conditions. The continuous ground contact and lower unit ground pressure of the tracks allow the robot to effectively accommodate variations in both slope and soil moisture [
32]. As a result, slippage and path deviation are significantly reduced, enabling tracked robots to maintain better operational continuity and stability in complex terrains and variable soil environments.
It is noteworthy that under conditions of both high slope and elevated soil moisture, a clear synergistic deterioration effect is observed. Specifically, increasing slope amplifies the negative impact of soil moisture on locomotion stability, while the slippery soil surface further compromises safety and path accuracy during movement on inclines. In contrast, the tracked configuration mitigates this compounded effect through its larger contact area and more uniform load distribution. As a result, the performance degradation of tracked robots is significantly less pronounced compared to wheeled systems [
33]. Understanding this interaction mechanism is crucial for developing more intelligent and adaptive mobility structures, thereby enhancing the operational reliability of agricultural robots in complex and dynamic orchard environments.
4.3. Interaction Mechanism Between Slope and Soil Moisture
Experimental data indicate that both increased slope and elevated soil moisture contribute to reduced traction performance of the robot, though their underlying mechanisms differ significantly:
An increase in slope alters the distribution of the robot’s center of gravity. During uphill movement, the load on the drive wheels decreases, increasing the likelihood of slippage or wheel idling. During downhill movement, forward shift of the center of gravity combined with gravitational acceleration can result in a “sliding run” effect, leading to greater path deviation and delayed braking response.
On the other hand, elevated soil moisture alters the cohesive properties between soil particles. Moist soil tends to become muddy, significantly reducing the ground friction coefficient. This is particularly detrimental to wheeled structures, as it results in decreased traction, severe wheel slippage, and a substantial rise in slip ratio.
When these two factors coexist, they produce a “synergistic deterioration” effect: in environments with both high slope and high soil moisture, robots are prone to traction loss and failure in path control. This effect is especially pronounced in wheeled configurations, where operational reliability drops markedly.
The experiment further revealed a synergistic deterioration effect between soil moisture and slope. High-slope environments exacerbate the negative impact of moist soil on surface adhesion, which is particularly evident in wheeled robots as significant power loss and trajectory deviation. This effect not only reduces operational efficiency but also increases the risk of mechanical wear and failure.
In contrast, tracked structures demonstrate greater operational robustness under these compounded adverse conditions, owing to their structural rigidity and continuous ground contact. This finding suggests that future robotic systems should prioritize the optimization of traction control algorithms and chassis design for wet-slope environments [
34]. For instance, improvements in track tension regulation, mud recognition, and active anti-slip mechanisms could be achieved through integrated hardware-software co-design, thereby enhancing the system’s responsiveness and correction capability on non-ideal terrain surfaces.
4.4. Alignment Between User Needs and Robotic Performance
Based on the results of the semi-structured interviews, this study further clarified the differentiated functional demands of various user groups—including orchard owners, plantation managers, and hired fruit pickers—regarding fruit-picking robots. Orchard owners prioritize harvesting efficiency and yield, favoring equipment capable of maintaining high picking performance across diverse operational environments. Plantation managers emphasize economic viability, expressing a preference for robots that are durable and easy to maintain [
35]. In contrast, hired workers place greater importance on safety and operational convenience, identifying ease of use and reduced physical burden as key considerations.
During the interviews, orchard owners commonly emphasized, “The faster the robot, the better; it shouldn’t be slower than a person,” reflecting their strong focus on operational efficiency. Plantation managers, on the other hand, typically expressed concern about “whether the machine is easy to repair and durable,” preferring equipment with low maintenance costs and easily replaceable parts. Harvesting workers most often highlighted, “The machine shouldn’t be too heavy or complex,” “It shouldn’t slip when going uphill,” and “Don’t use excessive force when picking fruit,” emphasizing the reduction of physical labor, avoiding mechanical damage to the fruits, and ensuring ease of operation [
36].
The stability of tracked robots in wet and sloped conditions directly addresses the orchard owners’ expectation of “all-weather operational efficiency” and meets the harvesting workers’ safety requirement to “reduce high-altitude operation risks.” Additionally, in response to the plantation managers’ suggestion to “reduce maintenance frequency,” the shock resistance and low wear characteristics of tracked structures demonstrate superior long-term usability. Furthermore, the survey revealed that most orchard owners are highly concerned with “intelligent functions” such as automatic ripeness detection and autonomous path recognition. This suggests that future developments should not only focus on the mechanical structure but also integrate the intelligent upgrading of perception and decision-making algorithms [
37].
4.5. Practical Implications and Technical Path Recommendations
From a practical perspective, this study demonstrates that tracked structures are more suitable for operation in complex orchard environments with high humidity and steep slopes. Particularly for orchards in the southern, rain-prone hilly regions or in areas with terraced and fragmented terrain, tracked robots can significantly reduce human labor risks and fruit damage, offering a broader application potential [
38].
It is recommended that future harvesting robots adopt a modular design, developing a switchable wheel-track chassis system to quickly adapt and switch functions based on terrain conditions. In terms of the control system, the integration of soil moisture and slope sensors should be implemented to enhance environmental perception and self-adjustment, improving the robot’s ability to cope with sudden terrain changes [
39]. Additionally, dynamic slip avoidance algorithms, slope prediction mechanisms, and fruit density heatmap distribution inference could be incorporated into the path planning system to enhance the overall level of automation and intelligence in operations.
Moreover, based on interviews where many harvest workers expressed a desire for robots to “carry items and pull fruit baskets,” it is recommended that future developments consider multifunctional extension modules, such as weight-bearing transportation assistance and intelligent fruit basket sorting. These tasks would transform the robot from a “single-purpose harvesting tool” into a “comprehensive field operation platform.”
It is important to note that the prototype used in this study was constructed at a reduced scale to enable rapid component switching and facilitate controlled, repeatable evaluation of terrain interaction behaviors. This small-scale setup allows for efficient and systematic testing of different wheeled and tracked mobility modules under varied soil and slope conditions. However, due to its reduced size, the prototype does not fully replicate the structural characteristics, weight distribution, or inertial properties of full-sized agricultural robots, which may affect real-world performance.
Despite these limitations, the key performance trends observed—such as increased slip rates under conditions of high soil moisture and steep slopes, as well as improved stability and traction with tracked configurations—are fundamentally governed by traction mechanics and the dynamics of contact area. These factors tend to scale proportionally when ground pressure conditions are comparable, thus allowing insights gained from the reduced-scale prototype to be relevant to larger systems.
For example, in regions like the United States where flat plains are more common, larger agricultural machines tend to be used. In contrast, the prevalence of mountainous terrain in many parts of China may lead to the adoption of smaller, more maneuverable harvesting equipment.
Future work will involve the design and construction of larger-scale field prototypes, incorporating reinforced structural frames and appropriately matched torque and power transmission systems. These full-scale prototypes will be tested under realistic agricultural workloads and diverse terrain scenarios to validate whether the trends identified in this study hold under practical operating conditions. Such efforts are critical to bridging the current gap between controlled experimental simulations and effective full-scale deployment, particularly in orchard environments where variable terrain and soil conditions pose significant challenges to robotic mobility.
5. Conclusions
This study conducted a systematic empirical evaluation of wheeled and tracked mobility systems for fruit-picking robots under varying slope and soil moisture conditions in real orchard environments. The findings demonstrate that while wheeled robots achieve higher movement efficiency in dry and flat terrains, their performance deteriorates significantly in muddy or inclined conditions due to increased slippage and path deviation. Tracked robots, on the other hand, consistently maintain better traction and directional stability, especially in wet and sloped terrains, confirming their suitability for more complex agricultural environments.
Three main contributions emerge from this research. First, the modular robot platform demonstrated effective and flexible switching between mobility modes, supporting terrain adaptability. Second, real-world testing in mountainous orchard environments provided practical validation of the robot’s performance under challenging field conditions. Third, the integration of user feedback—gathered through semi-structured interviews with growers, farm workers, and cooperative members—highlighted key operational priorities that are often overlooked in purely technical evaluations. These include the importance of safety during slope navigation, intuitive control interfaces, and ease of maintenance. These insights provide valuable direction for the future design and deployment of agricultural robots in complex terrains.
Compared with recent simulation-based mobility studies (e.g., Cosenza et al., 2023 [
17]; Califano et al., 2022 [
18]), which explore early-stage design and obstacle modeling, our work offers field-level empirical validation across multi-variable environmental conditions. It also complements prior experimental work by extending comparative testing into real terrain scenarios, which are crucial for practical robot deployment in orchards.
Nonetheless, several limitations must be acknowledged. The robot used was a reduced-scale prototype, designed to facilitate component switching and controlled testing. As such, the absolute performance values may not fully reflect those of full-scale systems. Additionally, all tests were conducted within a specific geographic region, potentially limiting generalizability to other soil types, climate conditions, or crop arrangements. Future studies should expand testing across different terrain types and incorporate full-scale robots with higher payloads and improved power systems.
In conclusion, this study contributes both empirical data and user-centered insights that advance the design of adaptive agricultural robot mobility systems. The results support the development of intelligent, terrain-aware robots capable of operating safely and efficiently in the variable and challenging environments typical of hilly orchards.


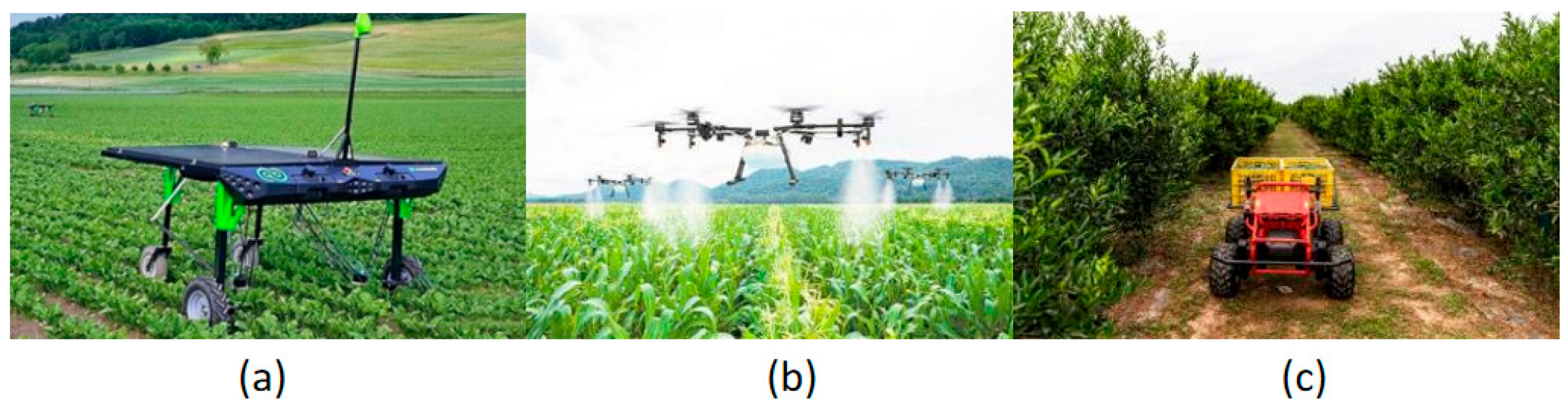
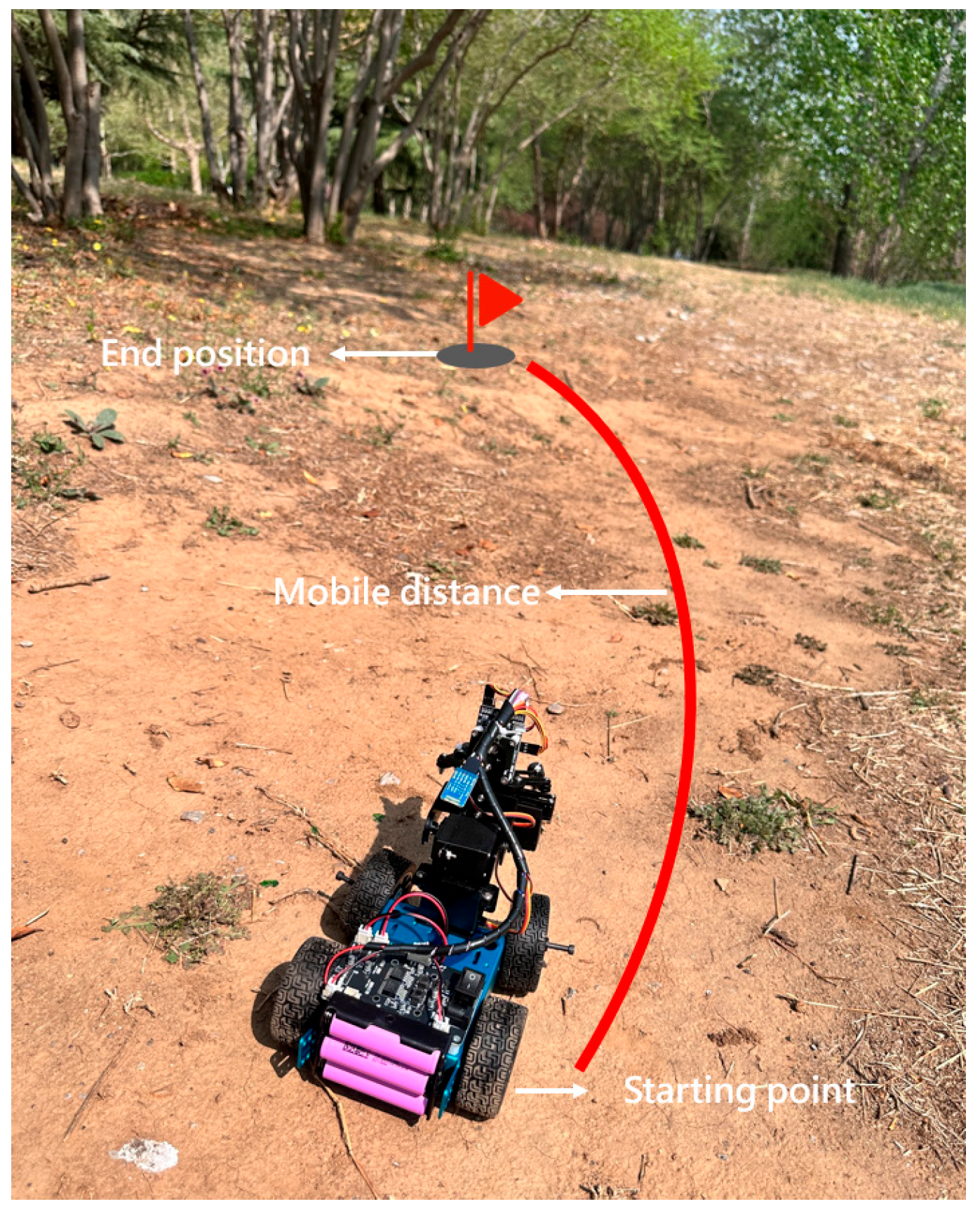
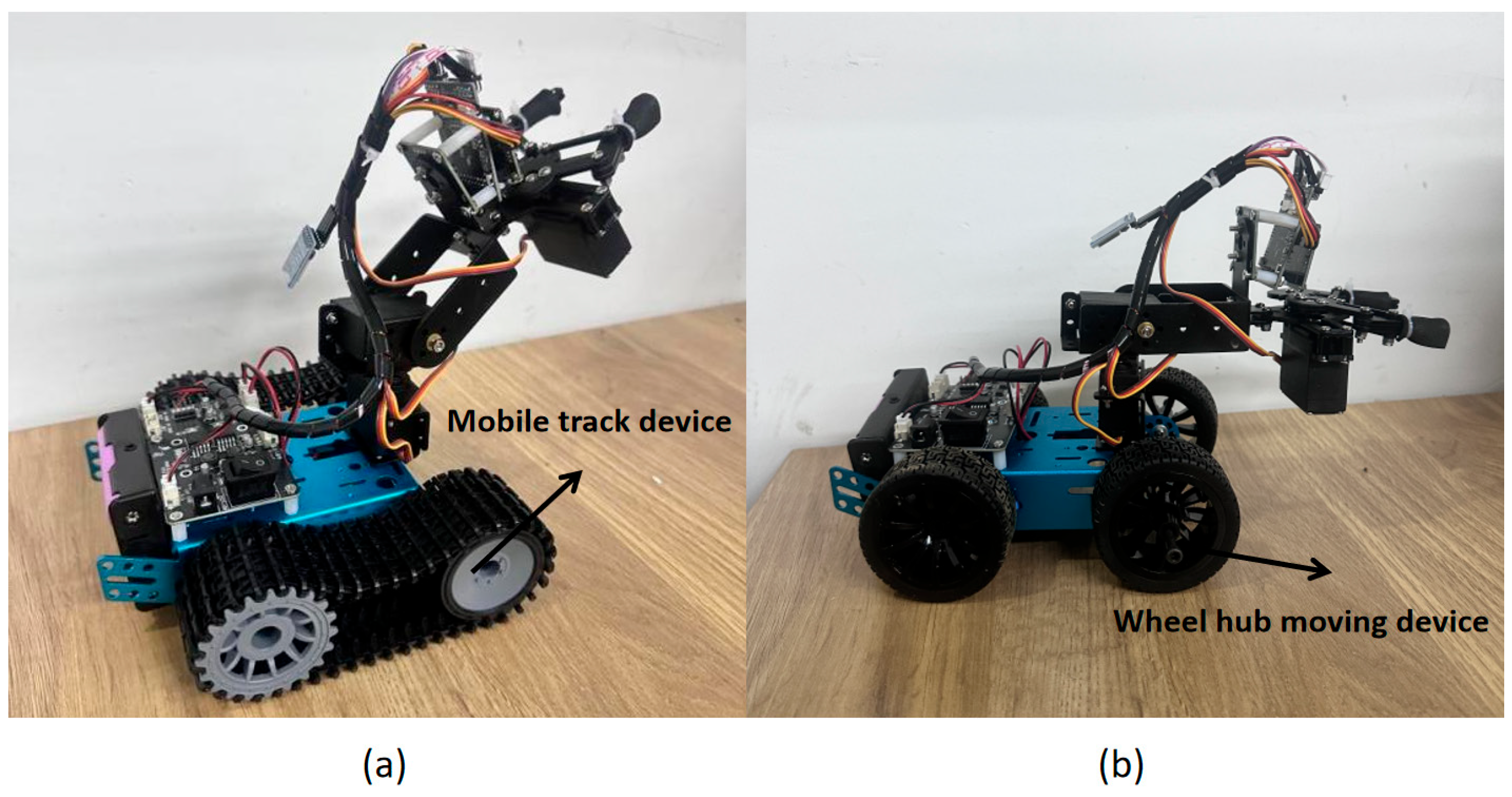
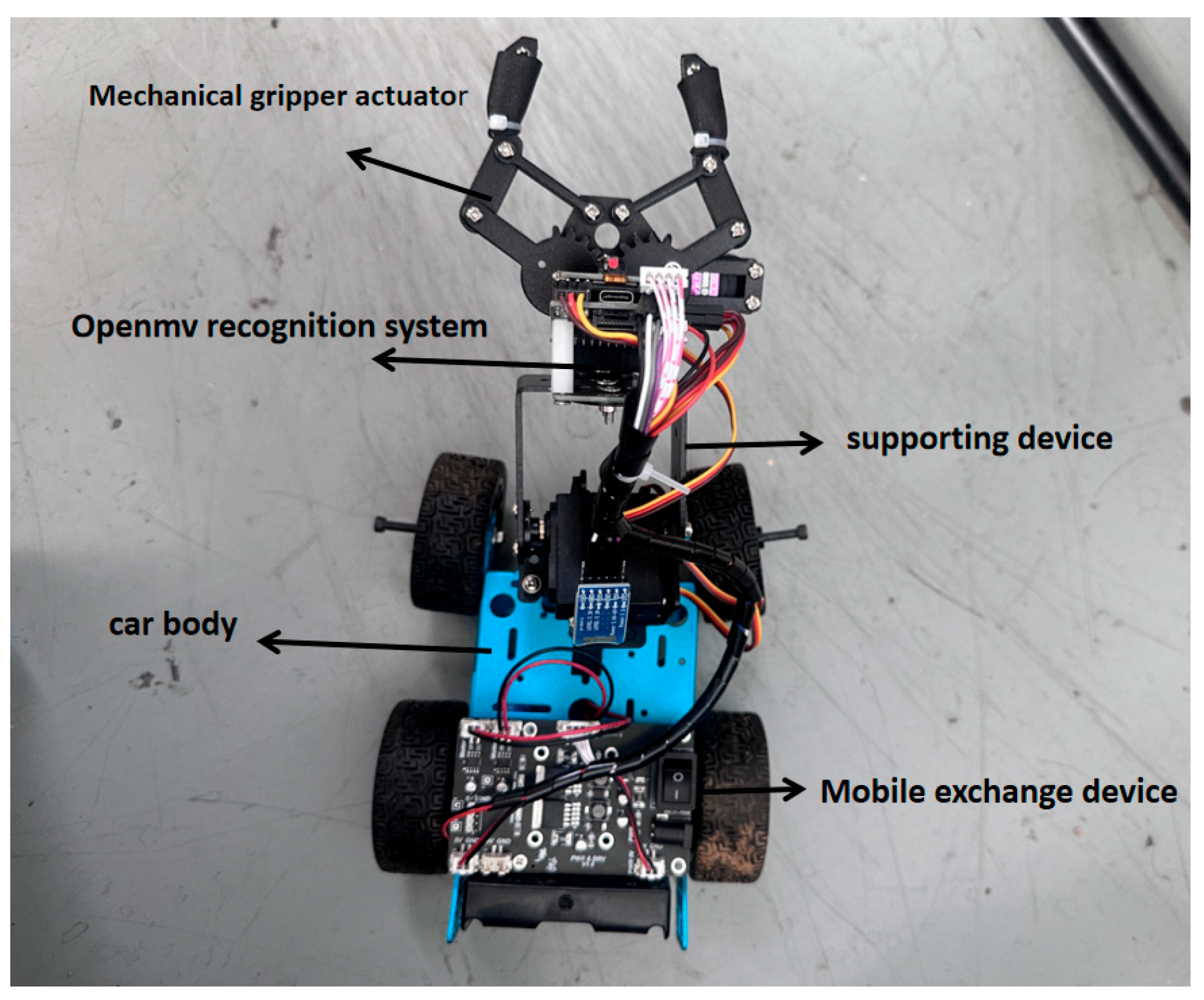
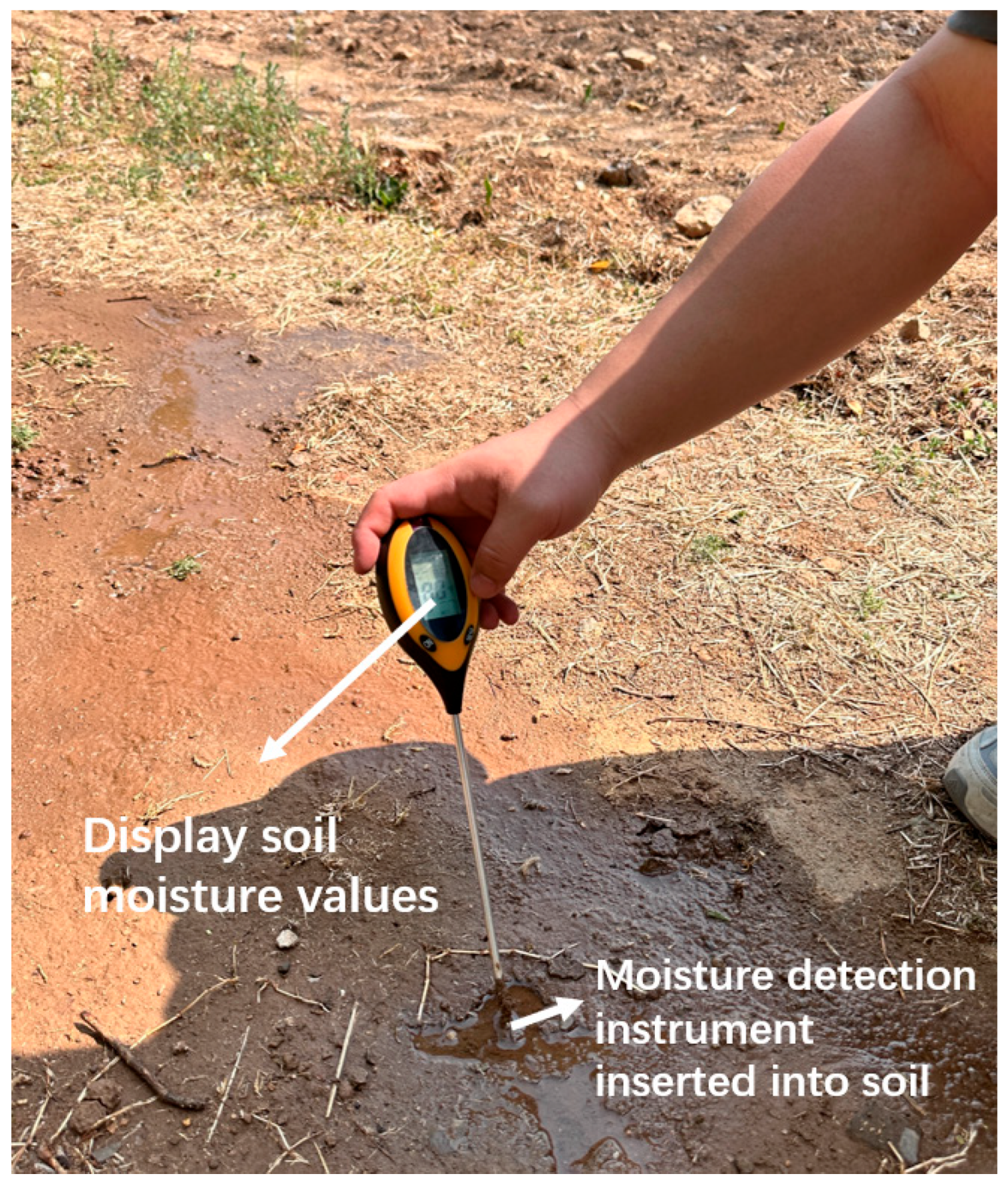
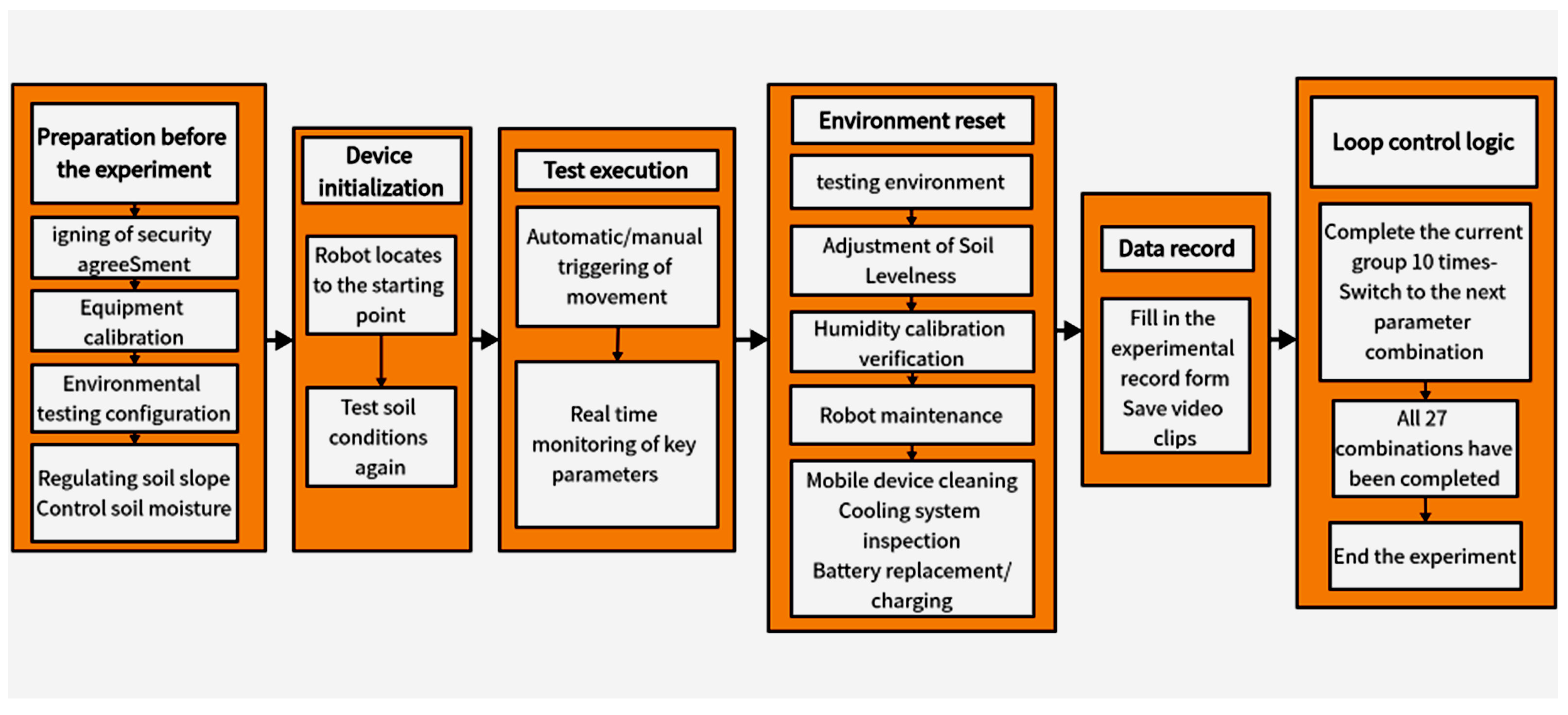
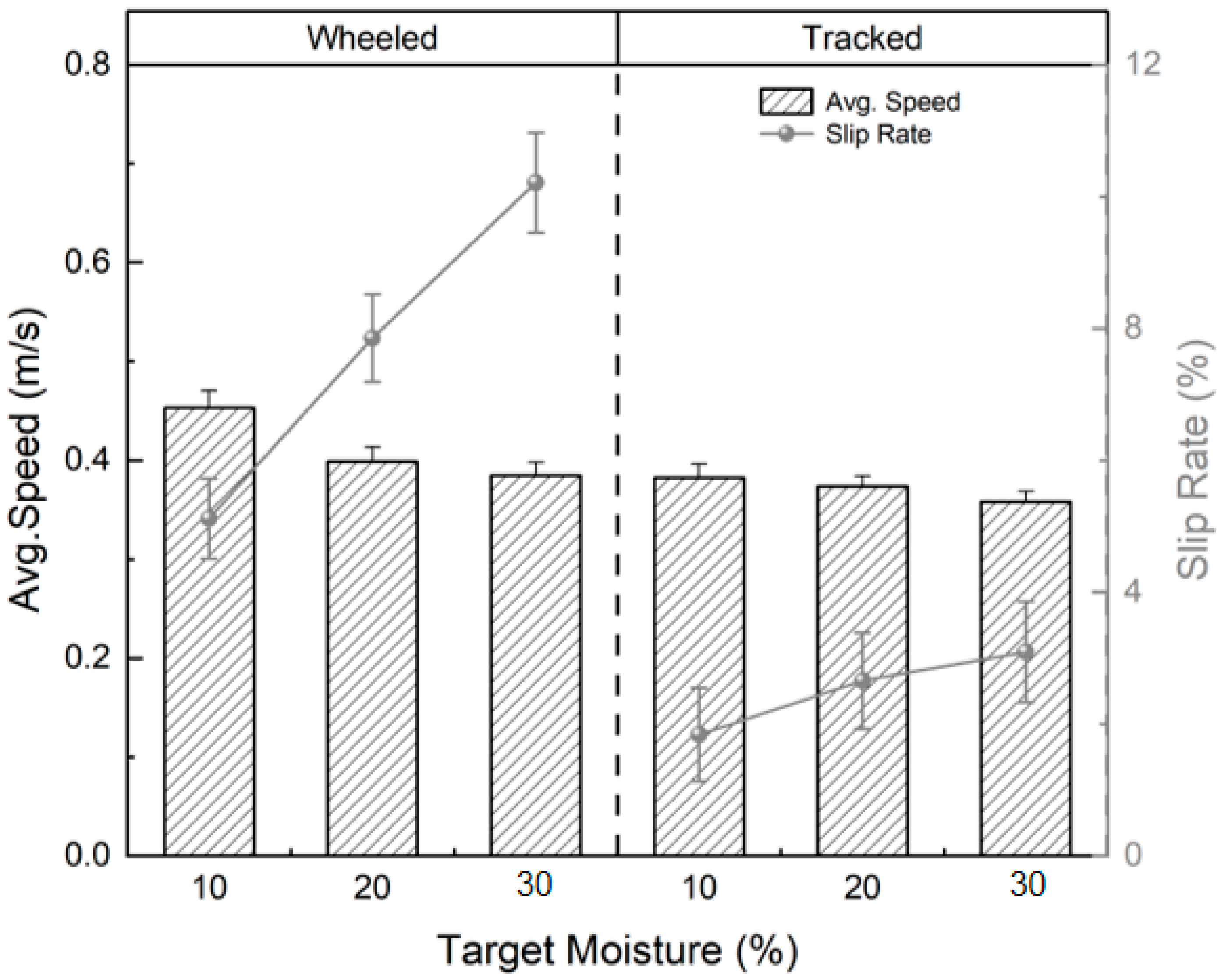
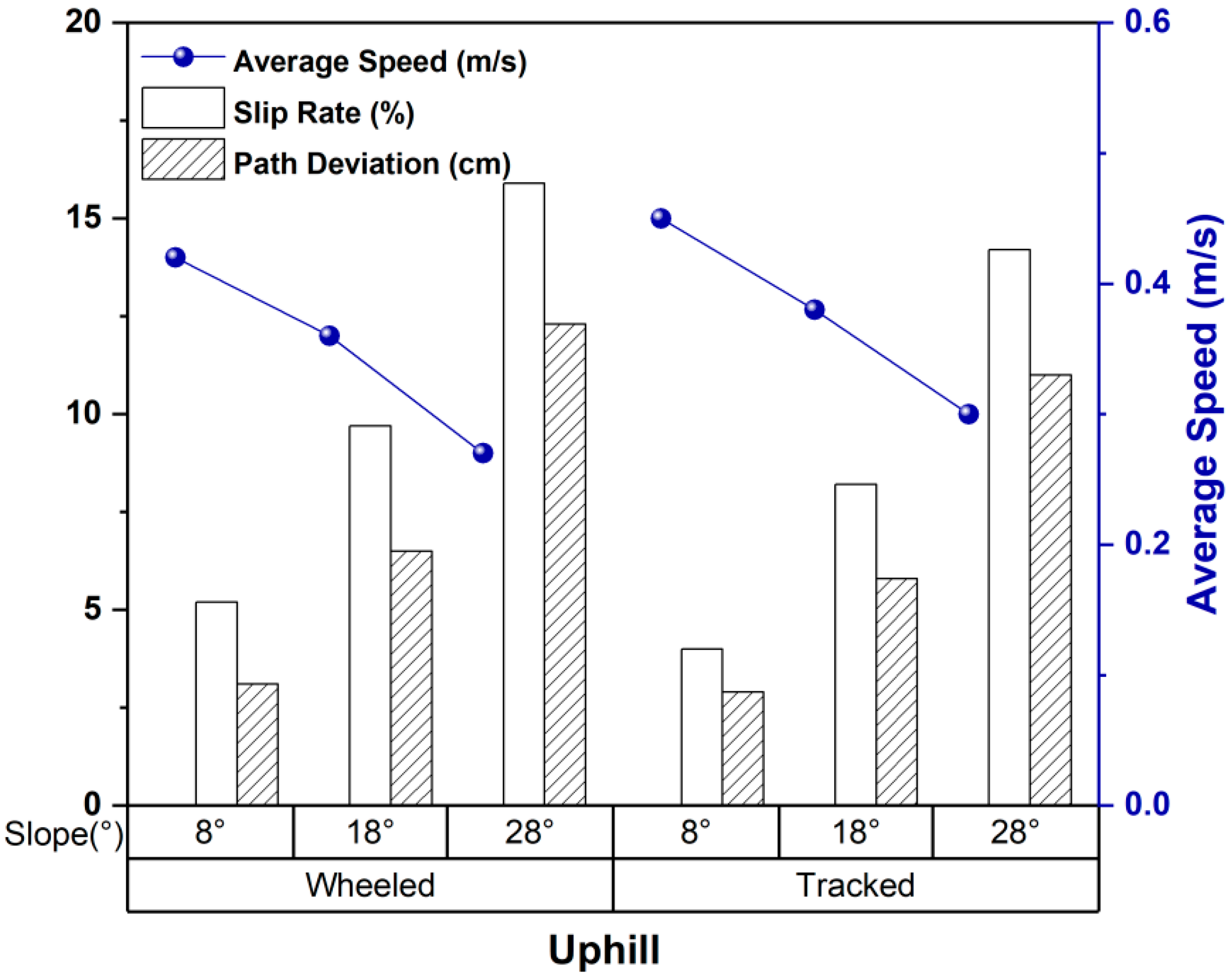
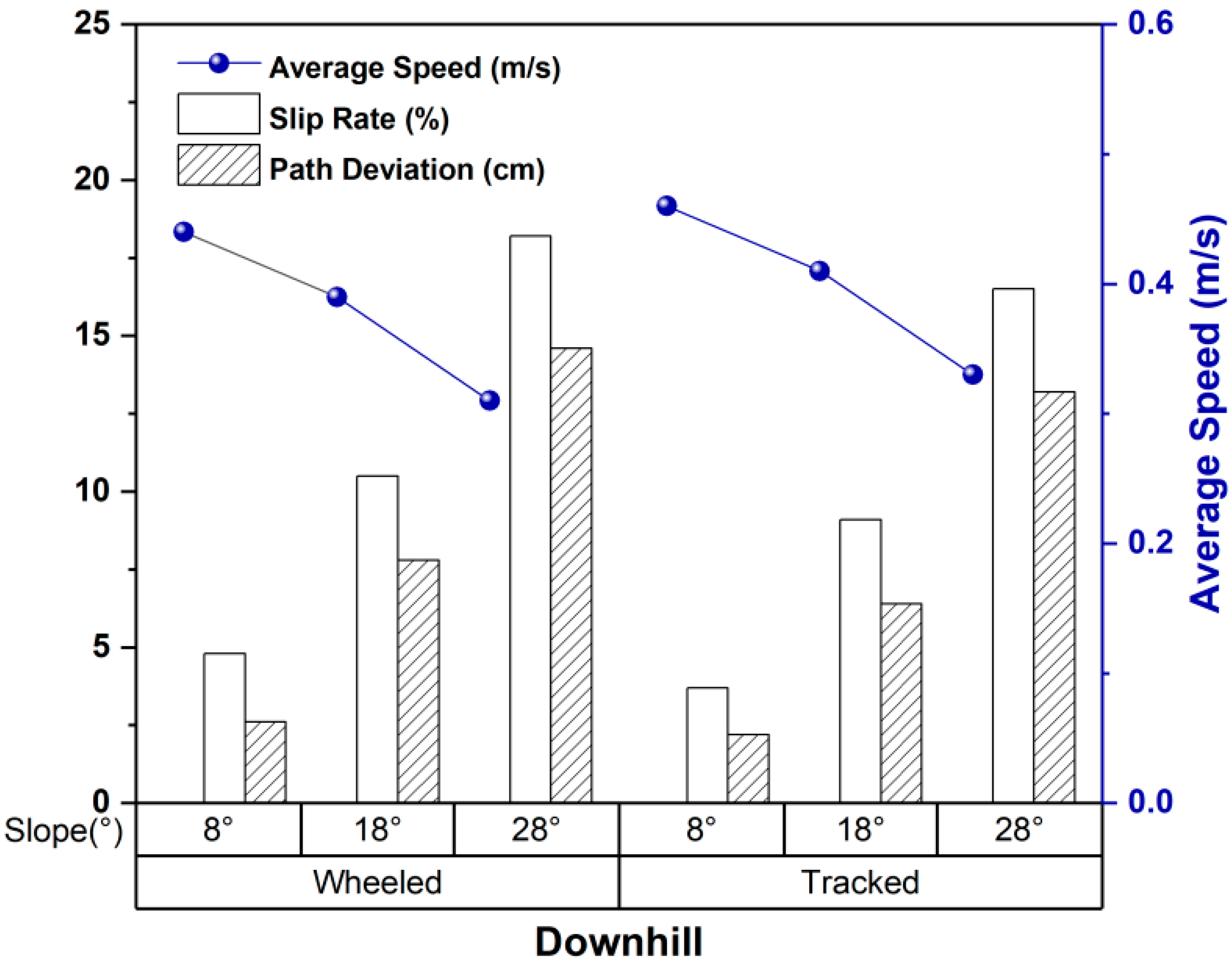
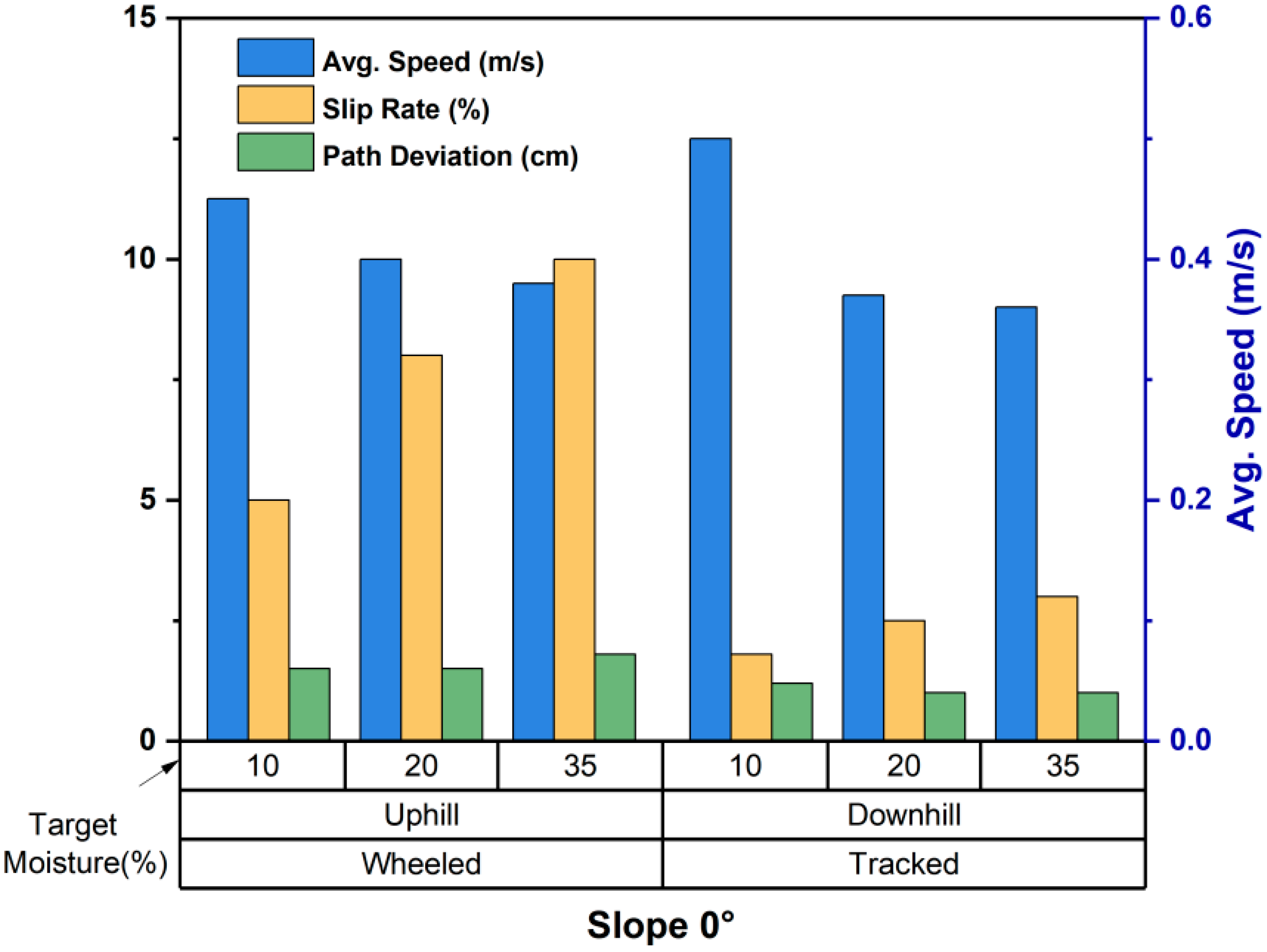
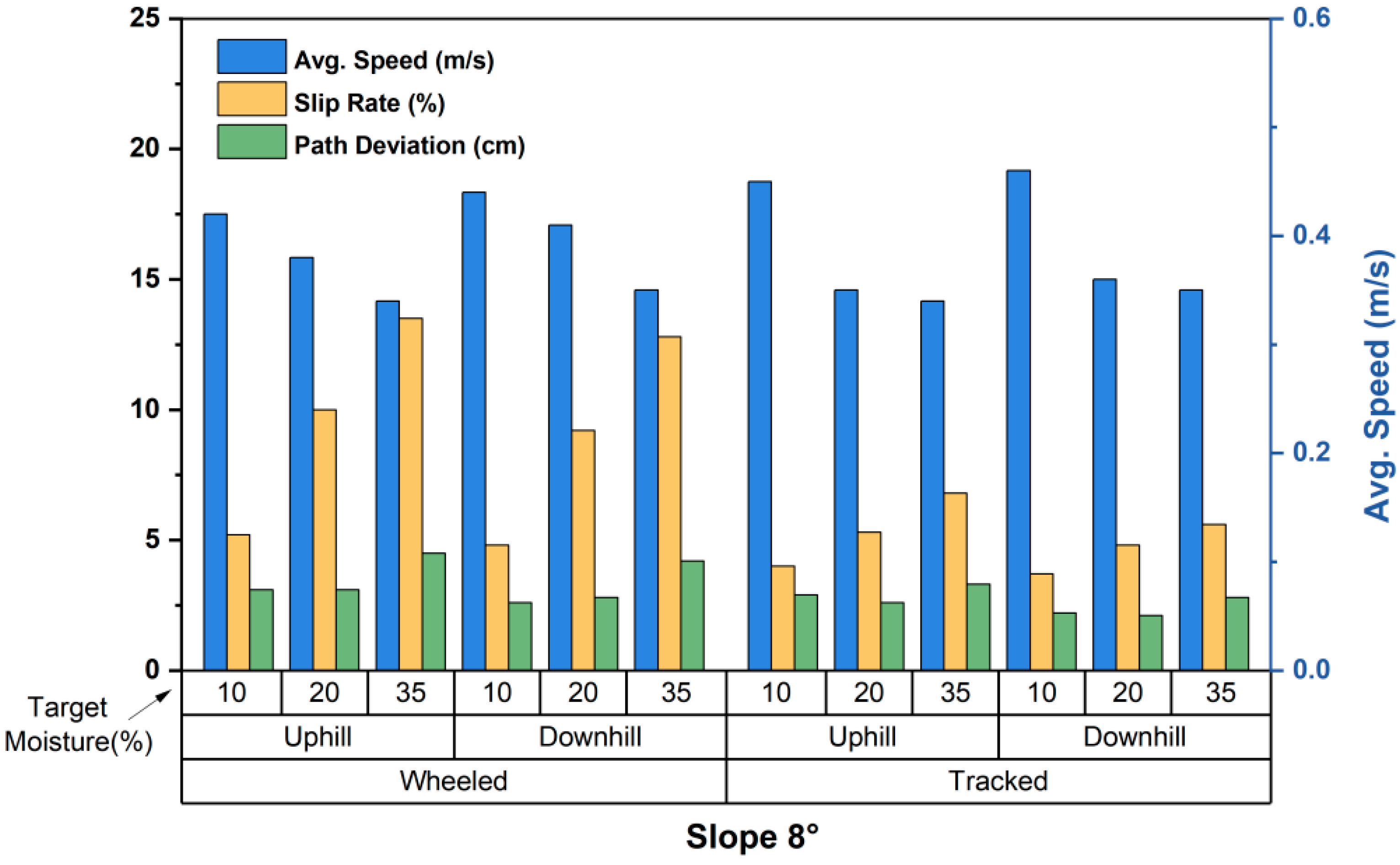
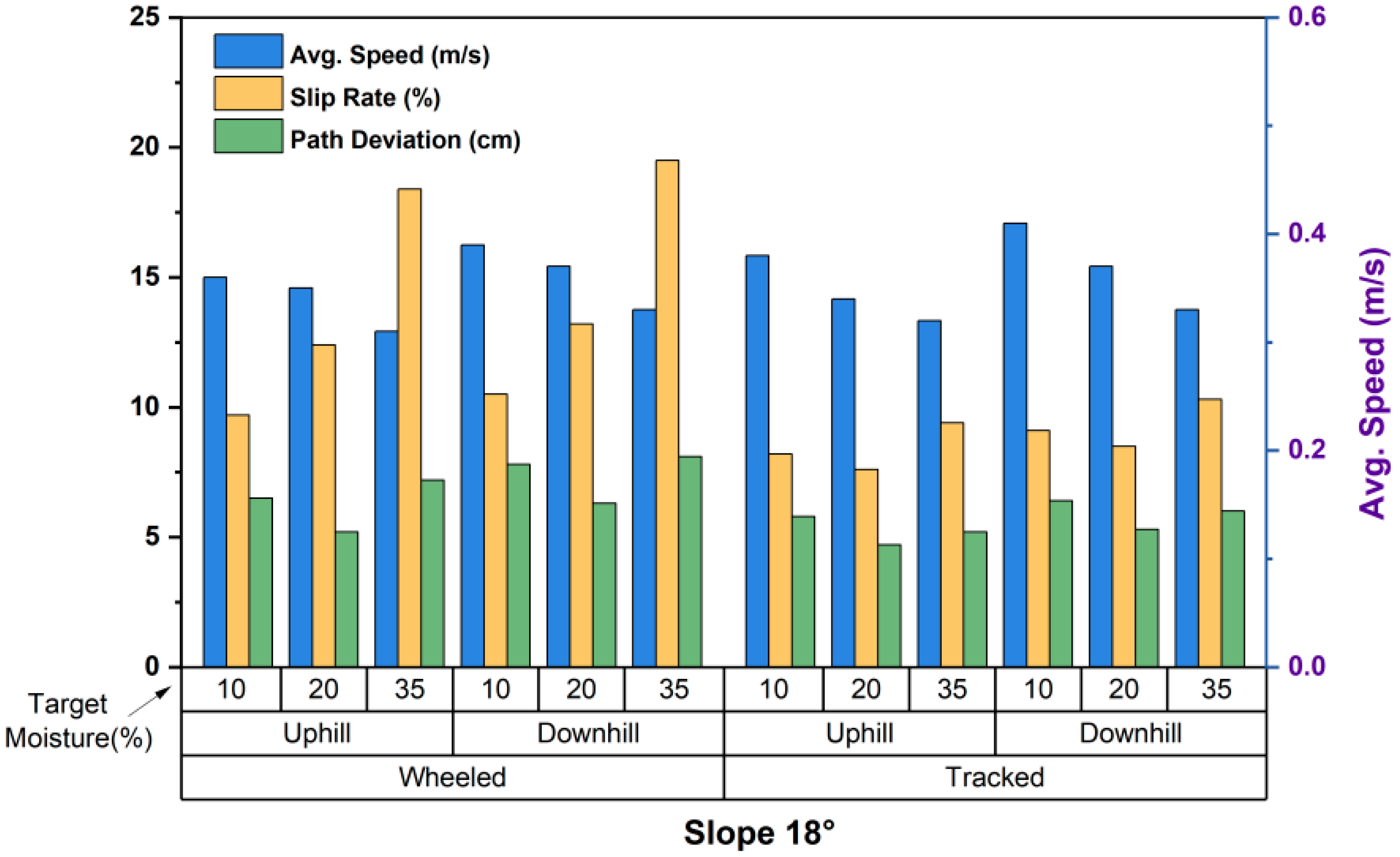
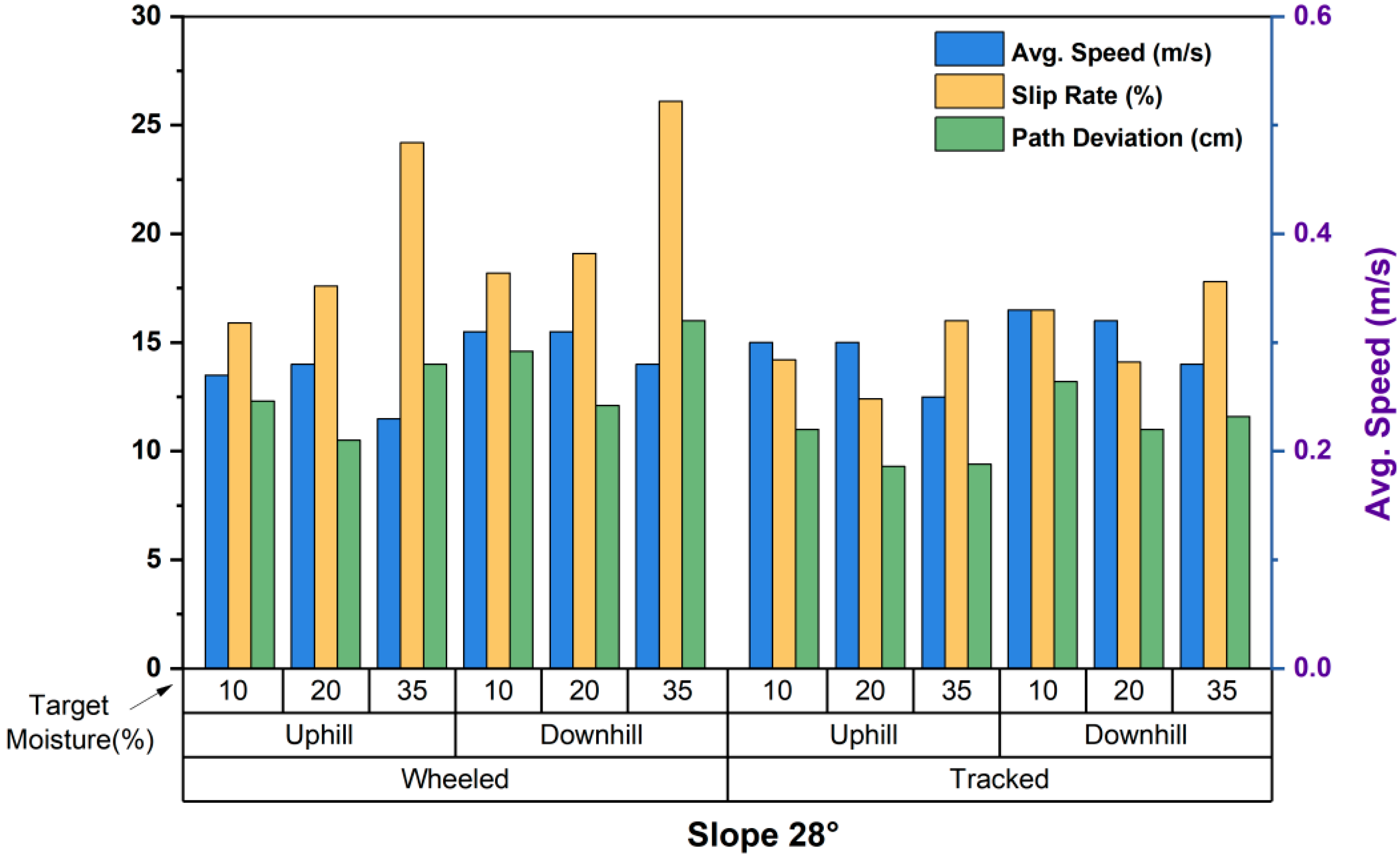

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}