1. Introduction
In the era of intelligent logistics, salt warehouses face increasing challenges in operational efficiency, adaptability, and coordination. Bagged salt, characterized by its large volume and heavy weight, is difficult to handle and stack through traditional manual operations [
1]. Furthermore, as customer demand shifts from low-frequency, large-batch orders to high-frequency, small-batch, and fragmented orders, the conventional warehouse operation model is becoming increasingly unsustainable [
2,
3]. Modern automated storage and retrieval systems (AS/RS) achieve full-process automation of goods reception, sorting, inventory management, and transportation by integrating warehouse management systems (WMS) with logistics robot technologies—including Rail Guided Vehicles (RGV), Air Sorting Robots (ASR), and Automated Guided Vehicles (AGV) [
4,
5]. However, the surge in multi-category, small-batch orders places higher demands on the warehouse system: breakthroughs are urgently needed in efficient task coordination and multi-machine collaborative operations under high-density scheduling environments [
6].
To address this transformation, a salt distribution center in China deployed an intelligent WMS integrated with an AS/RS, aiming to reduce labor costs and improve throughput. A critical issue in this intelligent system is the coordination of Rail Guided Vehicles (RGVs) and Air Sorting Robots (ASRs), two types of heterogeneous handling equipment responsible for executing inbound and outbound logistics tasks.
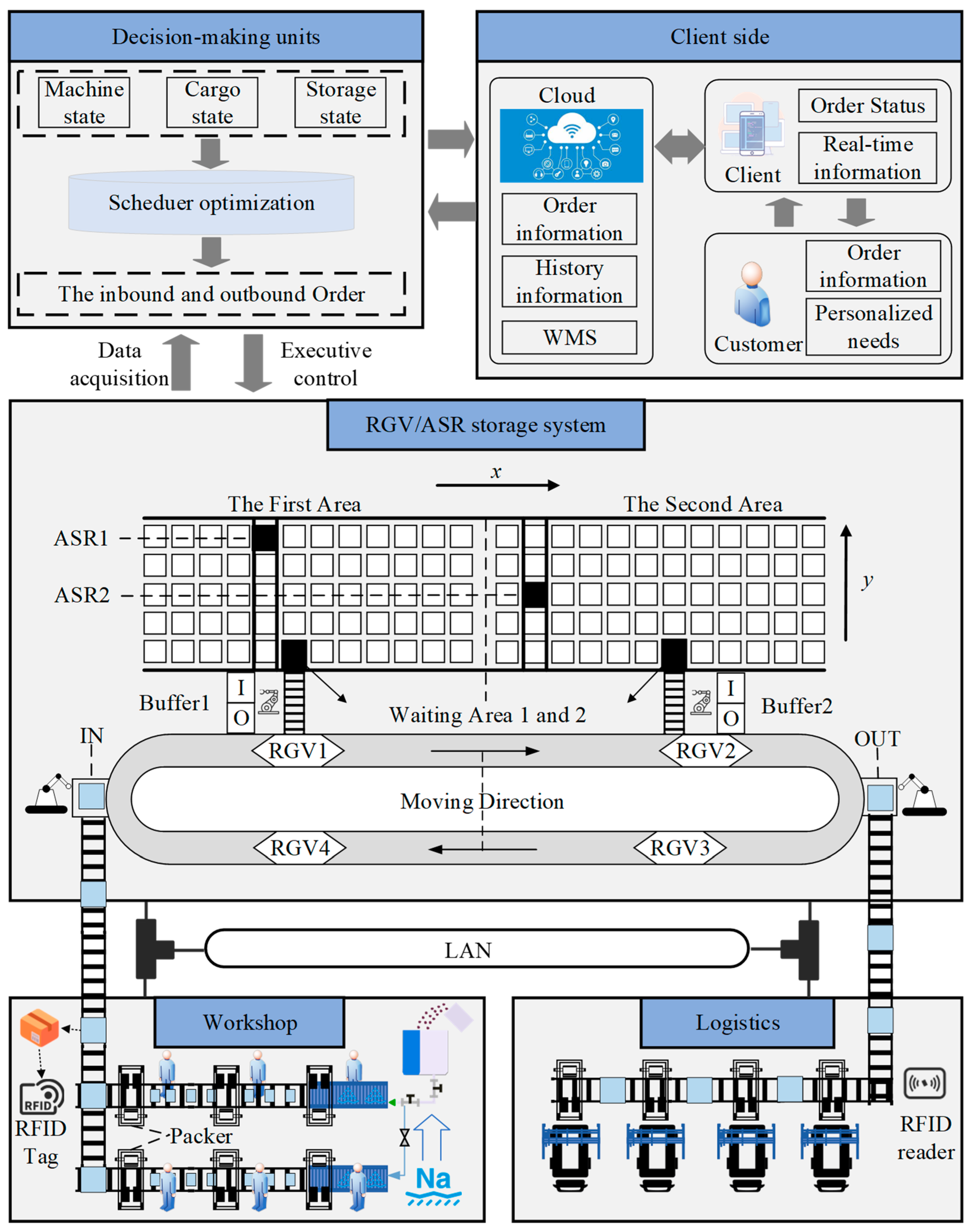
The inbound stage involves RGVs transporting bagged salt to inbound buffer zones, from where ASRs assign goods to designated storage locations. In the outbound stage, online customer orders trigger ASRs to retrieve goods, which are then transferred by RGVs to the outbound area for packaging. The layout of this RGV/ASR collaborative storage system is illustrated in
Figure 1. However, the high concurrency of orders in this environment can lead to RGV collisions and prolonged waiting times, significantly degrading system efficiency. Therefore, it is crucial to develop intelligent scheduling methods to achieve efficient, zero-wait, and collision-free coordination among devices.
Recent studies have explored various models and algorithms for warehouse scheduling, including multi-agent frameworks for coordinating AGVs and shuttle robots [
7,
8], and mixed-integer programming (MIP) models for optimizing task sequencing [
9]. Heuristic approaches such as rule-based logic and graph-based planning have been applied for collision avoidance, while capacity constraints have been tackled through discrete optimization techniques [
10]. Despite these efforts, existing research often focuses on homogeneous systems or specific sub-problems, with limited attention to the joint scheduling of RGVs and ASRs in zero-wait environments with tight buffer constraints.
Cloud-based WMS have gained increasing attention in recent years as an essential component of smart logistics. By leveraging cloud computing technologies, cloud-based WMS platforms offer scalable, centralized, and real-time capabilities for managing warehouse operations such as inventory control, order tracking, and task dispatching. These systems allow seamless integration across supply chains and provide flexible data access for various stakeholders [
11]. Recent studies have demonstrated the effectiveness of cloud-based WMS in enhancing system responsiveness and reducing operational latency, especially in e-commerce-driven logistics environments [
12,
13]. However, the integration of such platforms with adaptive scheduling algorithms for coordinating heterogeneous robotic fleets remains an open challenge, particularly in environments with high-density traffic and tight buffer constraints.
In parallel, the use of bio-inspired metaheuristic algorithms—such as population-based search [
14] and adaptive neighborhood mechanisms [
15]—has gained attention for solving complex logistics problems. However, their application to multi-robot coordination in warehouse systems, particularly under high-density scheduling and physical layout limitations, remains insufficient. Additionally, while cloud-based WMS solutions have enhanced responsiveness in logistics systems [
16], integrating them with adaptive scheduling algorithms for heterogeneous fleets is still underexplored.
To address the aforementioned gaps, this paper investigates the scheduling problem of zero-wait RGV/ASR storage systems considering finite buffer capacity and proposes a novel Adaptive Multi-neighborhood Hybrid Search (AMHS) algorithm. The approach integrates a mixed-integer linear programming (MILP) model with biologically inspired search operators and elite solution initialization. Performance is evaluated using a case study based on historical order data from a real salt warehouse.
The main contributions are given as follows:
- (1)
A MILP model for packaged salt warehouse logistics is developed to solve the task scheduling problem of multiple RGVs and ASRs, considering constraints such as zero-wait strategy, collision avoidance, and resource limitations.
- (2)
A rule-based multi-RGV collision avoidance strategy and a zero-wait strategy for loaded machines are proposed, effectively preventing RGV collisions and machine load waiting, offering a greener warehouse logistics solution.
- (3)
An improved Adaptive Multi-neighborhood Hybrid Search (AMHS) algorithm is introduced, using a dual-sequence encoding method to optimize the search space, combined with an elite solution initialization strategy. Global and local search operators are designed, with the latter inspired by biological hormone regulation mechanisms, employing a perturbation strategy to enhance local search performance.
- (4)
The model is successfully integrated into the WMS of a packaging salt company in China, supporting logistics for RGVs and ASRs, and validating the effectiveness of the proposed algorithm.
The remainder of this paper is organized as follows.
Section 2 provides a summary and analysis of the existing research on warehouse scheduling. In
Section 3, this article conducts a detailed analysis of the warehouse scheduling problem and establishes the mathematical models. In
Section 4, the AMHS algorithm is proposed. In
Section 5, a case study on the inbound/outbound scheduling problem of a salt company is simulated. Finally,
Section 6 summarizes this study and provides future research prospects.
2. Related Work
This section systematically reviews the research landscape of the AGV and RGV task scheduling and anti-collision, optimization algorithms, and highlights the research gap between existing research.
2.1. Task Scheduling and Coordination in Automated Warehouses
With the rise of automation in modern warehouses, task scheduling has become a central research focus, especially in systems involving multiple types of robots. As operational environments grow in complexity, effective coordination between robots such as RGVs, ASRs, and AGVs is increasingly vital for maintaining system efficiency. Over the years, a rich body of literature has emerged to address various scheduling challenges, ranging from static task assignment to dynamic, multi-robot collaboration.
Xu et al. [
17] initiated foundational work by proposing a scheduling framework for container terminals, which provided valuable insights for subsequent warehouse scheduling studies. Building on this, Chen et al. [
18] introduced an adaptive task planning algorithm for intelligent warehouses that could dynamically assign tasks from order batches and enhance stacking performance. However, their method processed orders strictly in arrival sequence, limiting scheduling flexibility. Ueno and Hirata [
19] focused on minimizing path lengths under dynamic picking orders using the Gurobi solver, but their model did not consider robot load capacities or distinguish between inbound and outbound operations.
To improve scheduling in high-density warehouse systems, Fan et al. [
20] developed a lifelong multi-shuttle scheduling framework (LMSSF) that adapts MAPF techniques for dynamic AS/RS environments by incorporating task conflict resolution and real-time re-planning. Similarly, Ren et al. [
21] proposed an integrated scheduling method for multi-deep four-way shuttle systems, optimizing request sequencing, equipment assignment, and conflict-free path planning to minimize makespan. Yet both approaches focused solely on outbound logistics, overlooking the interaction with inbound processes. Ho et al. [
22] adopted a deep reinforcement learning framework for scheduling heterogeneous robots, but failed to incorporate inbound coordination, which is essential in integrated logistics systems. Xu et al. [
23] developed a multi-objective evolutionary algorithm that accounted for both inbound and outbound flows but did not address the risk of robot collisions in narrow aisles. Lu et al. [
24] concurrently analyzed inbound and outbound scheduling using rule-based strategies and proposed a Constraint Programming (CP)-based adaptive simulated annealing local search algorithm for optimization, although the algorithm’s performance suffered from instability due to excessive assimilation cycles in its evolutionary process.
Despite notable progress, several gaps remain. Most existing works treat robots as homogeneous units and overlook the scheduling challenges posed by heterogeneous systems like RGV and ASR collaborations. Moreover, few studies explicitly address the combined impact of limited buffer capacities, zero-wait constraints, and real-time responsiveness, factors critical to modern warehouse operations. These limitations highlight the pressing need for integrated scheduling models capable of ensuring efficient, conflict-free coordination among diverse robots in tightly constrained environments.
2.2. Path Planning and Collision Avoidance in High-Density Systems
Path planning and collision avoidance have become crucial aspects of intelligent warehouse operations, especially in high-density and multi-robot environments. Han et al. [
25] proposed a novel bubble sort scheduling algorithm for multi-directional RGVs in AS/RS, aiming to reduce queuing times and optimize path planning. Sahu et al. [
26] proposed a hybrid metaheuristic combining Modified Cuckoo Search (MCS), Sine Cosine Algorithm (SCA), and Particle Swarm Optimization (PSO) to solve multi-robot cooperation and path planning problems, focusing on collision avoidance and synchronized motion in dynamic environments. Wang et al. [
27] examined RGV scheduling on circular tracks, formulating a mixed-integer programming model and solving it with a Hybrid Variable Neighbor Tabu Search (HVNTS) algorithm. These studies laid a solid foundation for path optimization, yet they primarily targeted specific robot types and failed to address coordination across heterogeneous fleets.
Meanwhile, researchers have also explored heuristic and metaheuristic methods to improve task routing efficiency. Jiang et al. [
28] applied a two-stage A* algorithm combined with a genetic algorithm to optimize task scheduling in AS/RS systems, while Lu et al. [
29] proposed a hybrid GA–MBO algorithm for minimizing operation and completion times in AS/RS hybrid flow shops. Mei et al. [
30] proposed an improved NSGA-II algorithm for multi-objective flexible job shop scheduling, integrating adaptive simulated annealing and elite strategies to enhance crossover and mutation, optimizing completion time, production cost, and carbon emissions. Although these methods demonstrate strong performance in small- to mid-scale systems, most assume static task sets and lack adaptability to dynamic task flows typical in real-world warehouses.
Despite significant advancements, existing studies often isolate inbound and outbound task processing, limiting system-wide optimization. Hsu et al. [
31] and Yan et al. [
32] proposed integrated simulation-optimization frameworks using hybrid algorithms such as WOA, PSO, and NSABC to solve multi-objective AS/RS scheduling problems. However, comprehensive coordination between different robotic agents like RGVs and ASRs remains insufficient. Most current approaches do not address real-time responsiveness, zero-wait constraints, or conflict resolution in shared working zones—key challenges for next-generation warehouse systems.
4. Improved AMHS Algorithm
The problem involves three subproblems: in/out information classification, task in/out sequencing optimization, and RGV selection. These subproblems are characterized by complexity, a large solution space, and highly coupled constraints. Traditional optimization algorithms face limitations due to fixed search patterns and limited depth, and the coding and decoding dimensions significantly affect the algorithm’s search process [
33,
34].
To address these challenges, this paper proposes an improved Adaptive Multi-neighborhood Hybrid Search (AMHS) algorithm. The method integrates task type, sequencing, and RGV assignment into a compact chromosome structure by optimizing encoding and decoding schemes, effectively reducing the number of chromosomes and exponentially shrinking the search space. A novel RGV selection mechanism further reduces solution uncertainty. The algorithm incorporates a global search operator and an adaptive local search operator inspired by neuroendocrine coordination mechanisms. The global search serves as the primary exploration method, while the local operator refines each solution through adaptive destruction and reconstruction. AMHS also adopts an elite initialization strategy and employs both point and block exchanges during the global phase, with a hormone-regulation-inspired local search enhancing exploitation. The overall procedure is shown in
Figure 4.
4.1. Encoding and Decoding
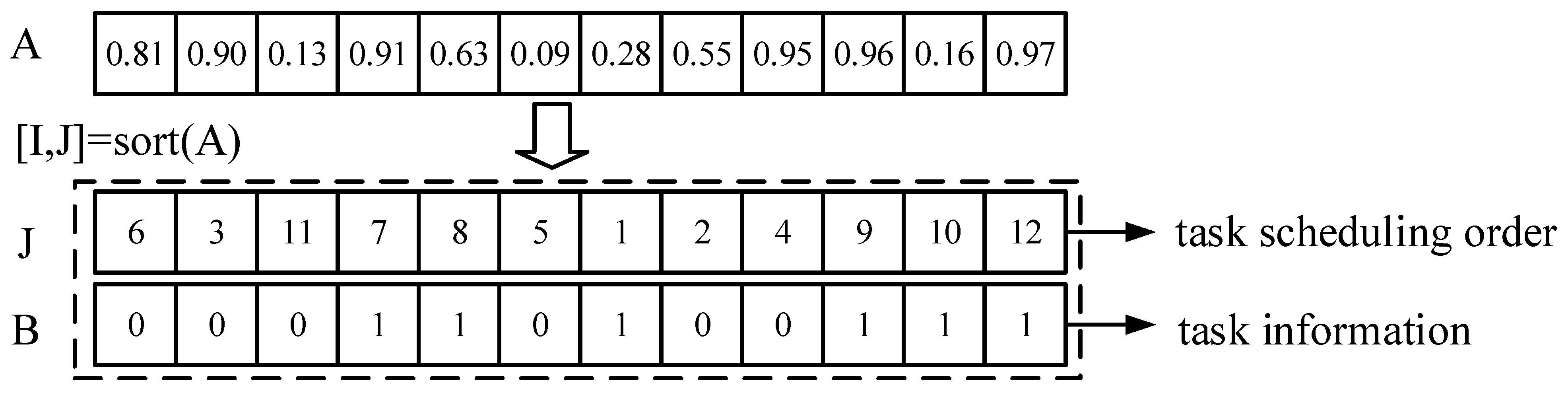
The initial step in solving the problem involves encoding it. Each task includes information such as task number, inbound/outbound details, sequences, and the RGVs assigned for transportation. If all task information is fully represented, four sequences are required, but optimizing all four simultaneously is challenging due to the high degree of coupling among them. To overcome this, a fractional coding approach is proposed, introducing a task scheduling sequence and a task information sequence to represent the encoded data.
This method addresses both the inbound and outbound task operations while considering spatial and scheduling constraints. By transforming the problem into a discrete optimization problem, a dual-sequence-based coding approach is adopted, leading to an adaptive encoding scheme. The process steps are illustrated in
Figure 5. This approach aims to enhance warehouse management by optimizing the scheduling of tasks, improving operational efficiency, and maximizing resource utilization.
As illustrated in
Figure 5, sequence A represents a series of random numbers, with the number of elements matching the total number of tasks to be scheduled for inbound/outbound operations. Sequence J corresponds to the task scheduling order, while sequence B denotes task information, where “1” indicates an outbound task and “0” indicates an inbound task. For instance, if the second element in J is “3” and the corresponding value in B is “0,” it signifies that task number “3” is an inbound task, scheduled to be processed as the second operation.
The decoding process involves transforming a given solution into a feasible scheduling plan and computing the completion time. In this approach, RGVs are sequentially assigned to the tasks listed in J based on the RGV assignment mechanism, while ASRs are allocated according to the cargo space location. Throughout the process, machine resource utilization is continuously updated to ensure optimal scheduling.
4.2. Population Initialization
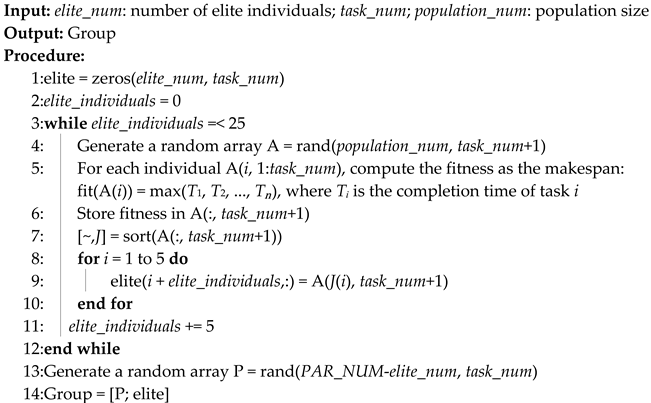
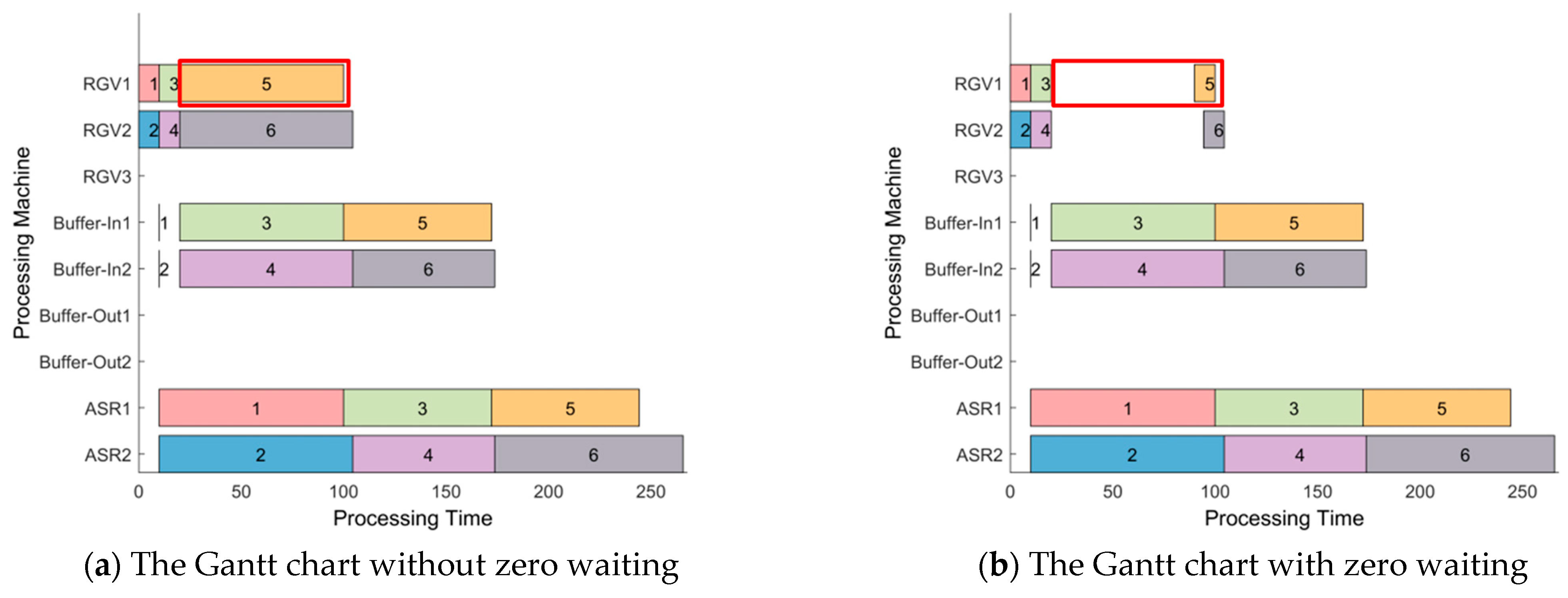
To enhance the quality of the initial population, accelerate the convergence speed of the algorithm, and improve the final solution’s quality, this paper introduces an elite solution strategy. The process for initializing the population using this strategy is detailed in Algorithm 1.
| Algorithm 1: Initialize population using the elite solution strategy |
![Machines 13 00546 i001]() |
In this algorithm, the fitness function
fit() is defined as the maximum completion time (makespan) across all tasks, i.e.,
where
Ti is the completion time of task
i, and
N is the task set. This value is used to rank individuals in the population for elite selection.
Through the elite solution initialization strategy, some high-quality solutions are introduced in the initial population, which may be retained and improved in the subsequent optimization process, thus improving the performance and effectiveness of the algorithm. At the same time, the strategy also helps to avoid the algorithm from falling into local optimal solutions and increases the ability of global search.
4.3. Global Search Operator
To enhance the global search capability of the algorithm and expand the search space, the global search operator is designed for task scheduling orders. This operator includes both point exchange and block exchange methods.
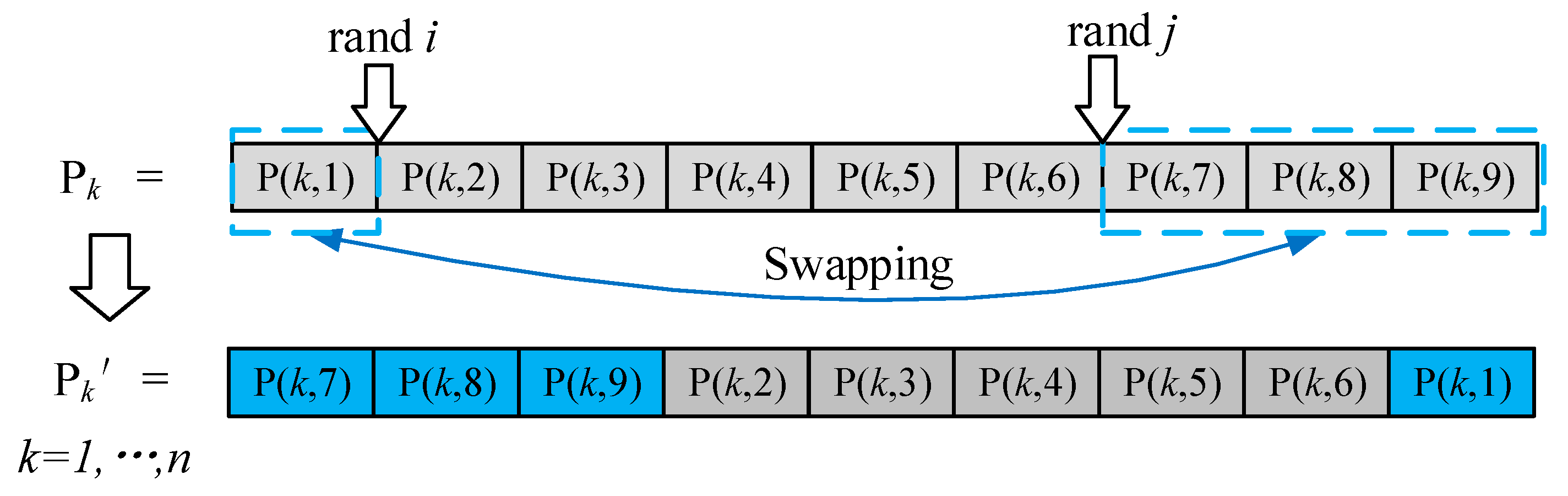
4.3.1. Point Exchange
To avoid generating invalid solutions and simplify the process of creating new solutions while preserving some of their original characteristics, a swapping operation is proposed. This involves randomly selecting two positions and then exchanging their elements, resulting in a new population matrix. The process for swapping sequential points in the task scheduling order is illustrated in
Figure 6.
4.3.2. Block Exchange
Task Scheduling Sequential Sequence Block Swapping presents a notable feature of having a low search difficulty while concurrently enabling an extensive search range for the solution. Nevertheless, the inherent crossover and its analogous operations may result in genetic drift [
35], i.e., a situation where the population undergoes genetic changes without substantial enhancement in individual fitness, potentially leading to a gradual deviation of the population from the optimal solution path. This phenomenon arises from the notion that certain high-quality solutions, once attained, require no obliteration but rather necessitate further local exploration locally [
36]. Consequently, the block exchange operator introduced in this study dynamically modulates the crossover probability based on solution quality, with the specific formula for the crossover probability detailed below:
where
p denotes the crossover probability dynamically adjusted according to the solution quality;
crossovermax and
crossovermin are the minimum and maximum values of the crossover probability, respectively;
quality is the current solution quality;
qualitymax and
qualitymin are the minimum and maximum values of the solution quality, respectively.
This equation ensures that the crossover probability is lower when the quality of the solution is higher, and it minimizes when the quality of the solution reaches its highest value, which avoids always destroying high-quality solutions.
In the execution process, a random number is assigned to each solution, and then it is determined whether a block exchange is performed or not. The block exchange process is shown in
Figure 7.
As shown above, randomly selected cross positions, cross positions to the nearest end, form a sequence of elements, exchanging the positions of the two sequences.
4.4. Local Search Operator
Although a global search operator is essential, it may be insufficient for ensuring the comprehensiveness and effectiveness of an algorithm in complex optimization problems. The algorithm can still converge to local optima, particularly when the solution space contains numerous local extrema. Additionally, as problem dimensions increase, the distribution of local optima becomes more dispersed and intricate, posing a significant challenge to global search and potentially limiting its effectiveness in high-dimensional scenarios. To address this, we introduce a local search operator inspired by biological hormone regulation mechanisms. This operator aims to enhance the algorithm’s capability for in-depth exploration around known solutions, complementing the global search and collectively improving the overall optimization performance.
Mechanisms of Hormone Regulation in Organisms
In the process of hormone regulation, various glands in the organism (such as thyroid, gonads, etc.) secrete corresponding hormones, which flow throughout the body through the blood circulatory system and act on the cells, tissues and organs of the organism to produce the unique regulation and control of hormones, such as insulin and glucagon secreted by the pancreas to regulate the blood glucose level of the organism. With the characteristics of micro, high efficiency, and specificity of hormone regulation, organisms can rapidly maintain the internal environment homeostasis. The hormone regulation law proposed by Farhy et al. [
37] is non-negative and monotonic, and has the characteristics of the ascending function and the descending function, and follows the Hill functional regulation law as shown in Equation (16):
where
C is the independent variable,
T is the threshold, and
T > 0;
n is the
Hill factor
. The rate of change of the slope of the curve is affected by the values of
T and
n.
By studying the above, Farhy came up with the mechanism of feedback regulation of hormones and conducted relevant experiments on
F(
C) in connection with this study. Based on the results of the experiment, the following conclusion was drawn: when hormone 2 regulates the gland that secretes hormone 1, the relationship that exists between the secretion rate of hormone 1 and the concentration of hormone 2 is shown below:
where
C2 represents the concentration of hormone 2,
represents the initial secretion rate of hormone 1, and
C0 is a constant.
Linear functions or constants are often used in PSO algorithms to design inertia factors, but due to their linear nature, it is difficult to avoid the search from falling into a locally better neighborhood structure. Given the aforementioned, the bio-hormone feedback regulatory function has monotonicity and nonlinear characteristics, which can better regulate the step size of the local search. Therefore, this paper proposes the following design method of the inertia factor w to improve the performance of the PSO algorithm, and the inertia factor w is designed as follows:
where
i is the number of iterations,
wmax and
wmin are the two maximum and minimum extreme values of the inertia factor, and
w0 is the initial value.
According to Ho et al. [
38], the self-learning behavior
c1 ×
r2 and social learning behavior
c2 ×
r2 of bird flocks affect the quality of solutions; however, the regulation of these two learning behaviors is not independent of each other. In other words, the two random weighting parameters (self-learning ability and social learning ability) are not independent of each other. In addition, the random variable
r2 is introduced to control the speed of the local search.
Therefore, based on the hormone regulation mechanism of organisms, combined with the self-learning and social learning behaviors of particles, this paper proposes a deep search operator with the following search process:
where
Vi(
t) and
Xi(
t) denote the speed and position of the individual in the
t-th iteration, respectively,
Pi(
t) denotes the optimal position of the individual, and
Pg(
t) denotes the optimal position of the population. The local search procedure based on hormonal regulation is detailed in Algorithm 2.
| Algorithm 2: Local Search |
![Machines 13 00546 i002]() |
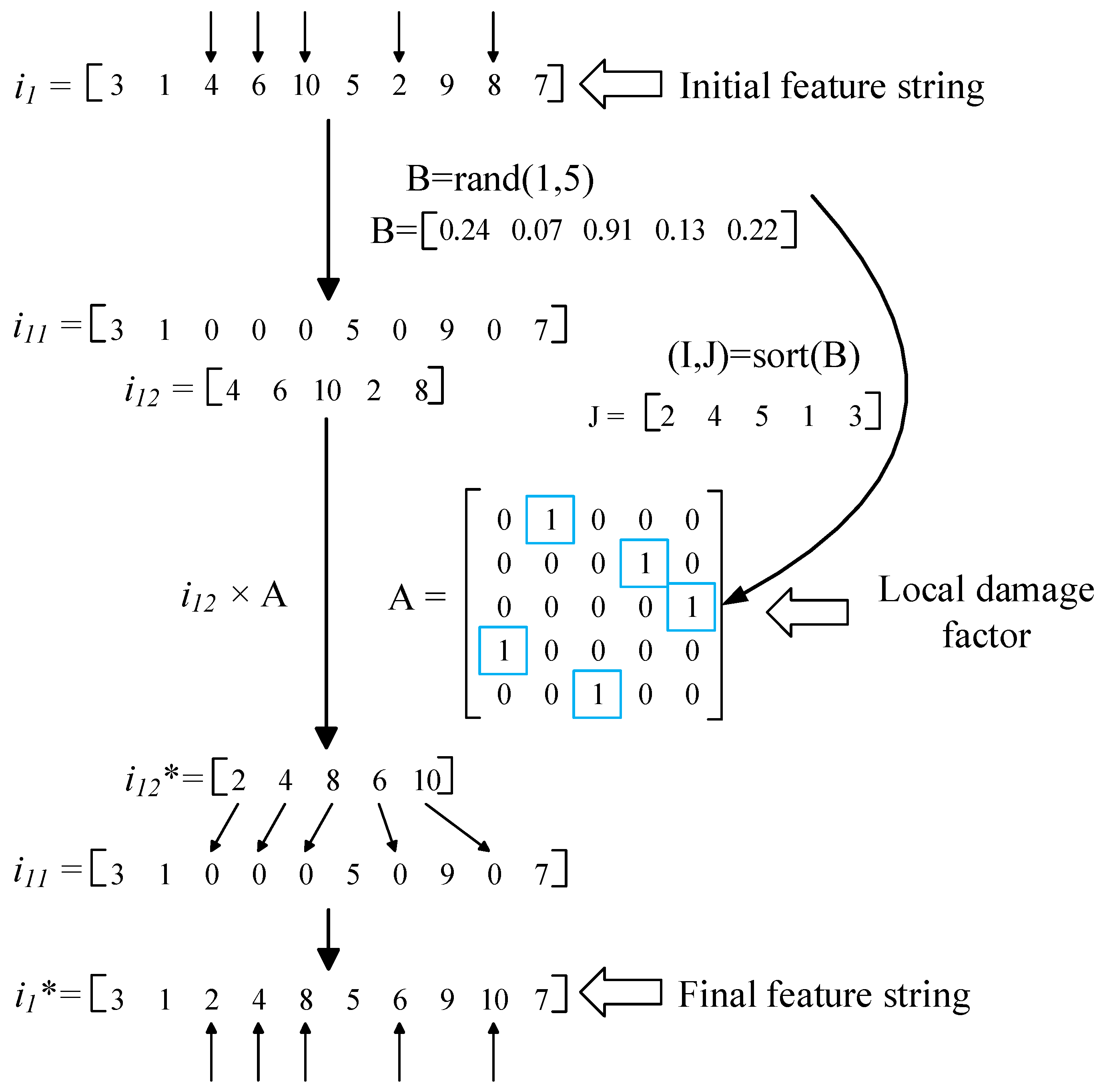
4.5. Localized Destruction and Reconstruction Perturbation Strategies
The Iterated Greedy (IG) algorithm is an efficient method for solving FSPs [
39], since its core operations of destruction and reconstruction operators, insertion-based local perturbation operators, can introduce some stochasticity or control parameter variations to explore new solution spaces. This helps the algorithm to adapt to the dynamically changing search process, to avoid falling into local optima during the search process, and to provide more possible solutions for comparison and selection.
In building the zero-wait RGV/ASR warehouse system inbound and outbound scheduling problem considering finite buffers, in this paper, the inbound and outbound tasks are split into two kinds of processes, which are abstracted as extensions of hybrid flow operations. However, in the IG algorithm, the time complexity is
O(
) since all
n jobs need to be inserted into (
n − 1) positions and each insertion will cause
n − p + 1 moves (where
p is the optimal insertion position). Inspired by the above ideas, a local destruction and reconstruction perturbation strategy with less complexity is proposed to select a random number of jobs for each solution to randomly select a position for insertion, and thus its time complexity is
O(
), and its process is shown in
Figure 8.
First, the number of random solutions d () is randomly selected, a random order is given to each of the selected numbers using the random number matrix and then repopulated according to this order. As shown in the above figure, this approach enables the reordering of some of the sequences in the solution, achieving the goal of introducing randomness in the search process, and the method has a small computational complexity.
5. Numerical Experiments and Result Analysis
The runtime environment is PyCharm with Python version 3.8. The computer configuration is as follows: Windows 11 64-bit operating system; Intel(R) Core(TM) i5-13400F processor (2.50 GHz, Intel Corporation, Santa Clara, CA, USA); 16 GB RAM; and NVIDIA GeForce RTX 4060 Ti GPU (NVIDIA Corporation, Santa Clara, CA, USA).
5.1. Experimental Parameters Setting
To address the zero-wait coordinated scheduling problem of RGVs and ASRs under finite buffer constraints, the motion parameters of RGVs and ASRs were configured based on the actual operational environment of a salt warehouse. The site-specific conditions are summarized as follows: the loop length of the RGV track is 288 m; the average spacing in the x-direction of the cargo area is 1.6 m; the average spacing in the y-direction is 1.1 m. The total no-wait time for one RGV loop is approximately 192 s. For each ASR transportation task, the interaction time is fixed at 30 s. Since this study does not consider space optimization, task coordinates in the y-direction are not specified. Therefore, the RGV’s loaded and unloaded displacements in the y-direction are both approximated as 5 m. Each RGV cycle consists of loading goods, transporting them to storage, and returning empty to the buffer area. The detailed device-related parameters are shown in
Table 2.
To verify the superiority of the proposed algorithm, this paper adopts actual data from the production process of enterprises to verify the search efficiency of the algorithm. The datasets are shown in
Table 3.
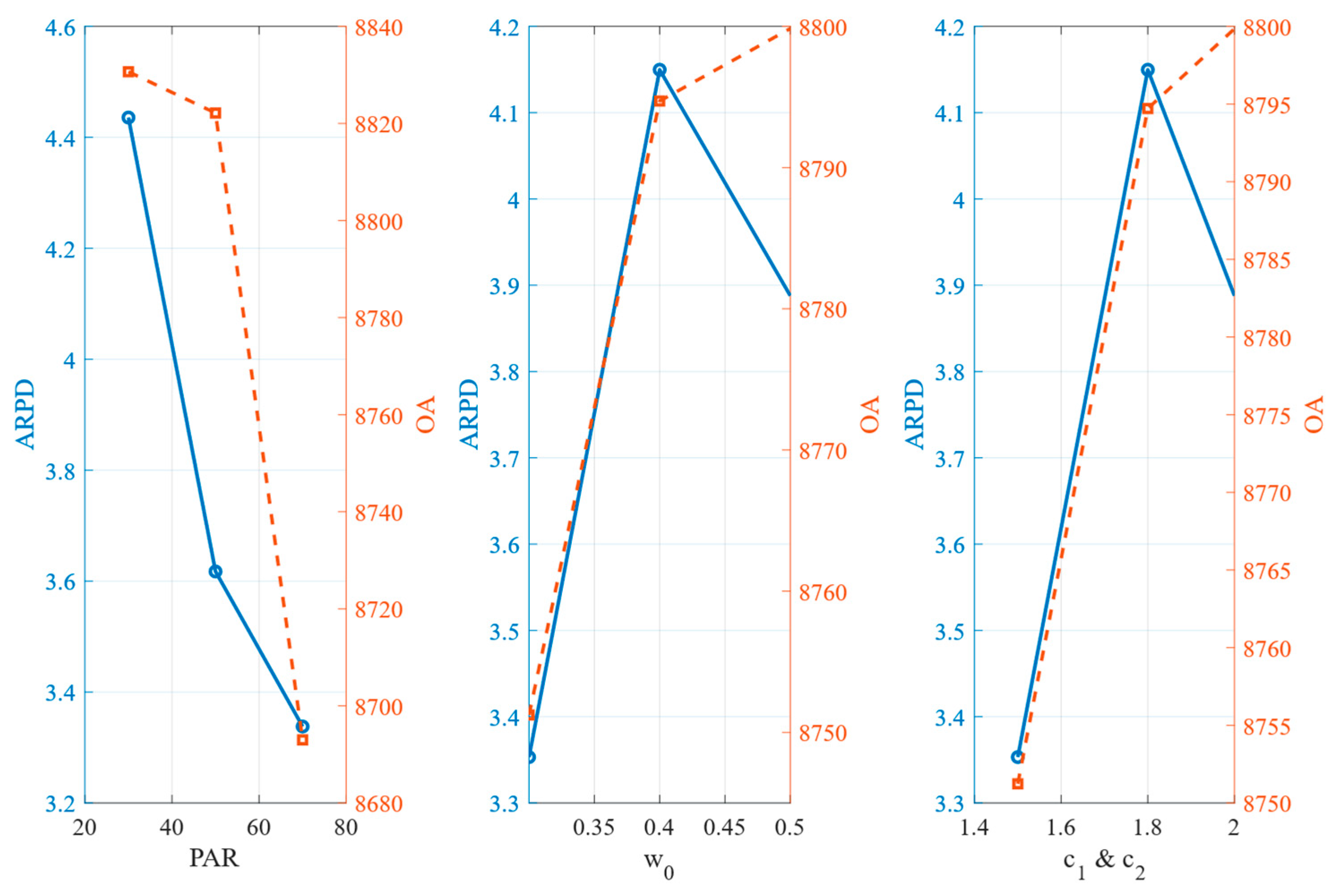
To enhance the optimization performance of the AMHS algorithm, a set of orthogonal experiments was designed to tune its core parameters. Among many influencing factors, population size (PAR), base inertia weight (w
0), and the cognitive and social learning factors (c
1 and c
2) were selected for adjustment. These three parameters directly affect the search ability, convergence behavior, and stability of the algorithm. PAR controls the breadth of the search space. A small population may cause premature convergence, while a large one increases computation. The base inertia weight w
0 is the key parameter in the dynamic inertia strategy. It balances exploration and exploitation by adjusting the influence of current velocity. The cognitive and social factors control learning from individual and global best solutions, respectively. To simplify the design and avoid interaction effects, c
1 and c
2 were set to equal values. The parameter ranges were selected based on existing literature and adjusted to fit the characteristics of this problem. Details are shown in
Table 4.
To assess performance, each algorithm was run independently 10 times, and the results were compared using the Optimal Average (OA) and Average Relative Percentage Deviation (ARPD), calculated as follows:
where
z is the number of runs, and
is the result of the
i-th run of the algorithm.
OA is the average of the results and
is the optimal solution of the
z runs.
The optimal parameter combination observed from
Figure 9 is PAR = 70, w
0 = 0.3, and c
1 = c
2 = 1.5, under which the algorithm achieves superior performance in terms of average ARPD.
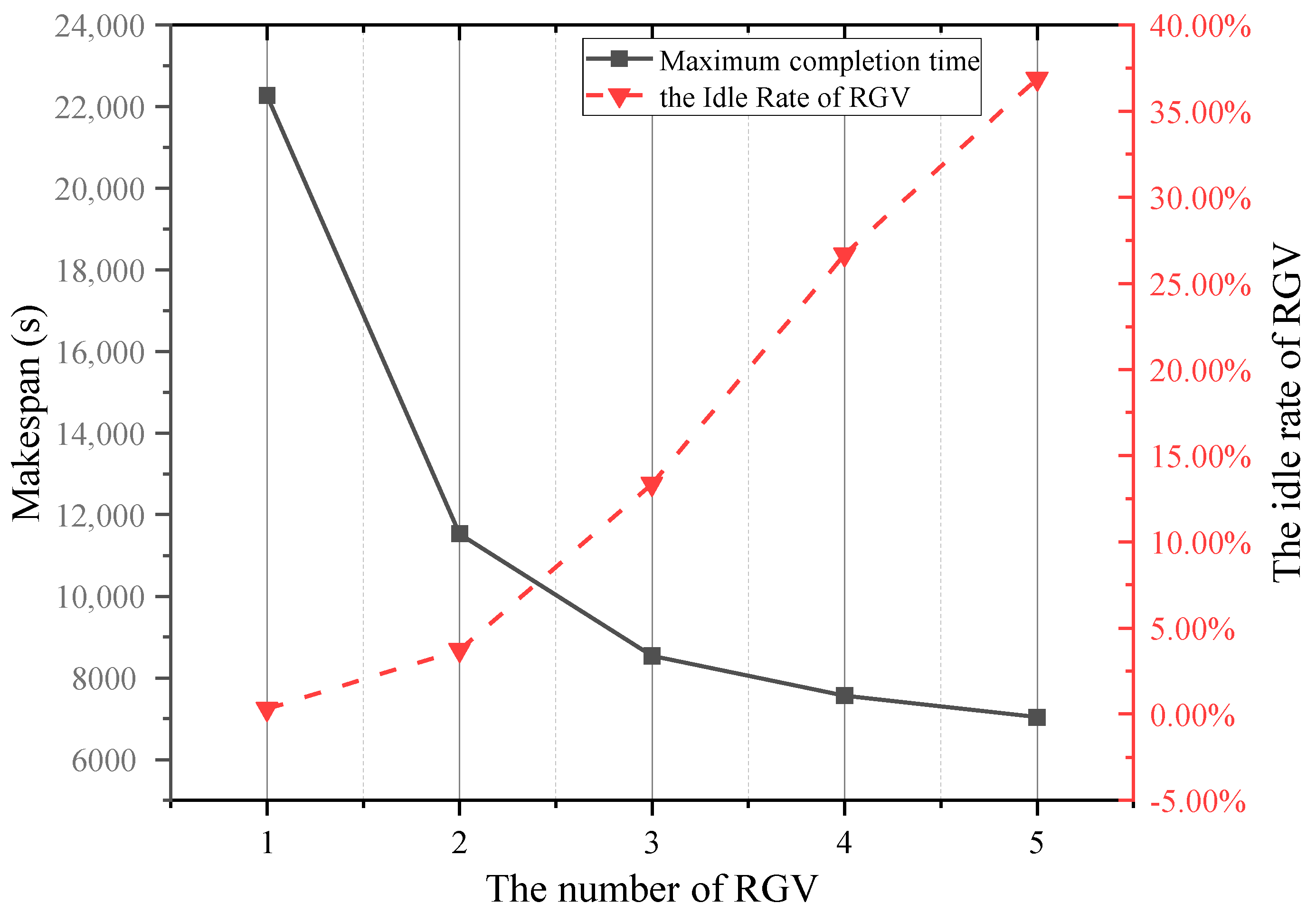
5.2. Effect of RGV Quantity on Warehouse Efficiency
The number of RGVs on the circular track is a critical factor affecting the throughput of the warehouse system per unit time. Therefore, this study investigates the impact of the number of RGVs on the total completion time and RGV idle rate, using the data from
Table 3. As shown in
Figure 10, the total completion time of the warehouse decreases as the number of RGVs increases, and the reduction becomes more gradual when the number of RGVs reaches 3. Additionally, the RGV idle rate increases with the number of RGVs. To balance the RGV idle rate and the total completion time, it is evident that the optimal number of RGVs in this scenario is 3, providing the best cost-effectiveness. In the following experiments, we set the number of RGVs to 3.
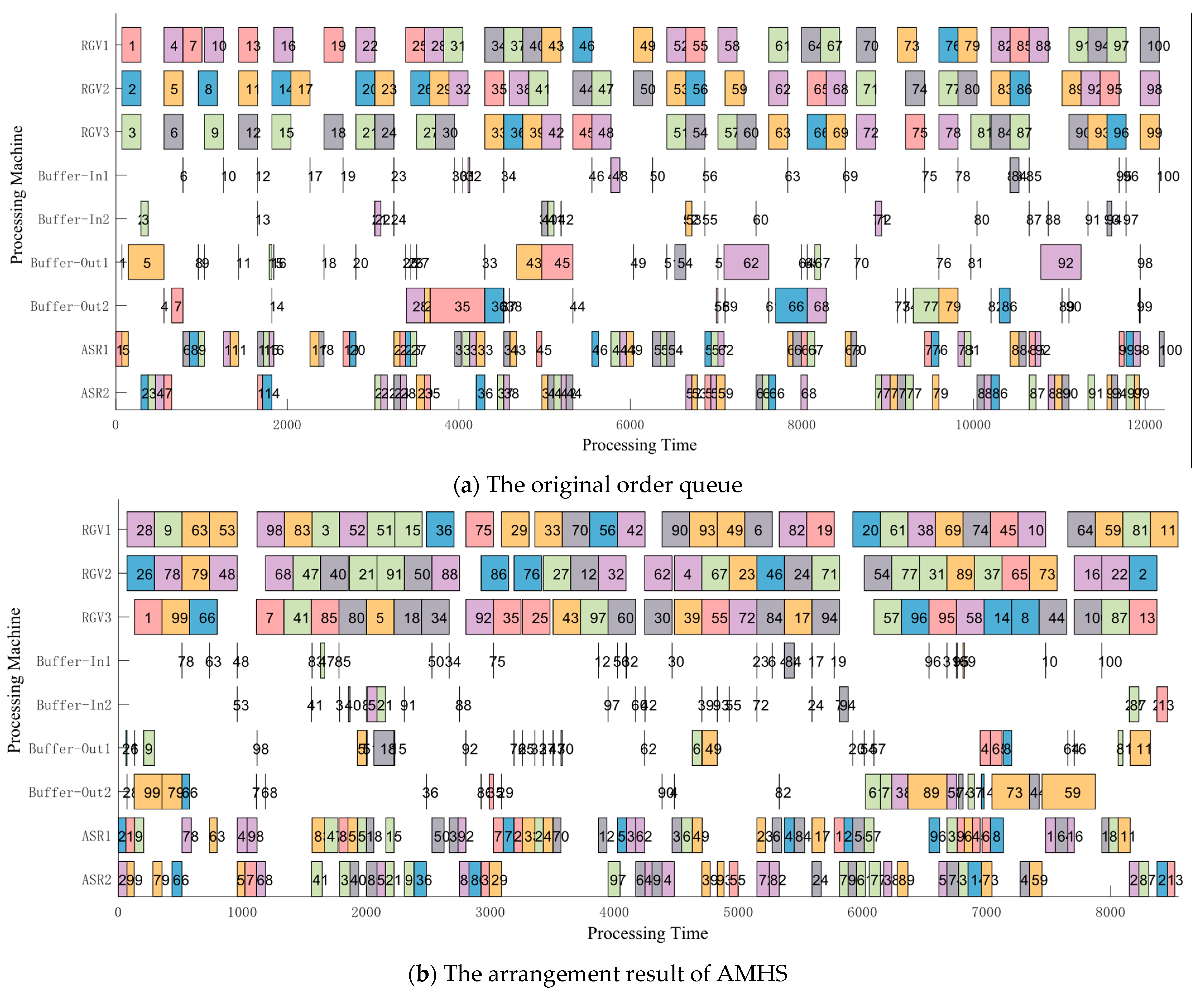
Furthermore, the feasibility of the proposed scheduling model is verified through the case study presented in this section. Specifically, based on the experimental data provided in
Table 3, the system successfully schedules 100 inbound and outbound tasks using 3 RGVs and 2 ASRs, without any conflicts, deadlocks, or resource overload. As illustrated in
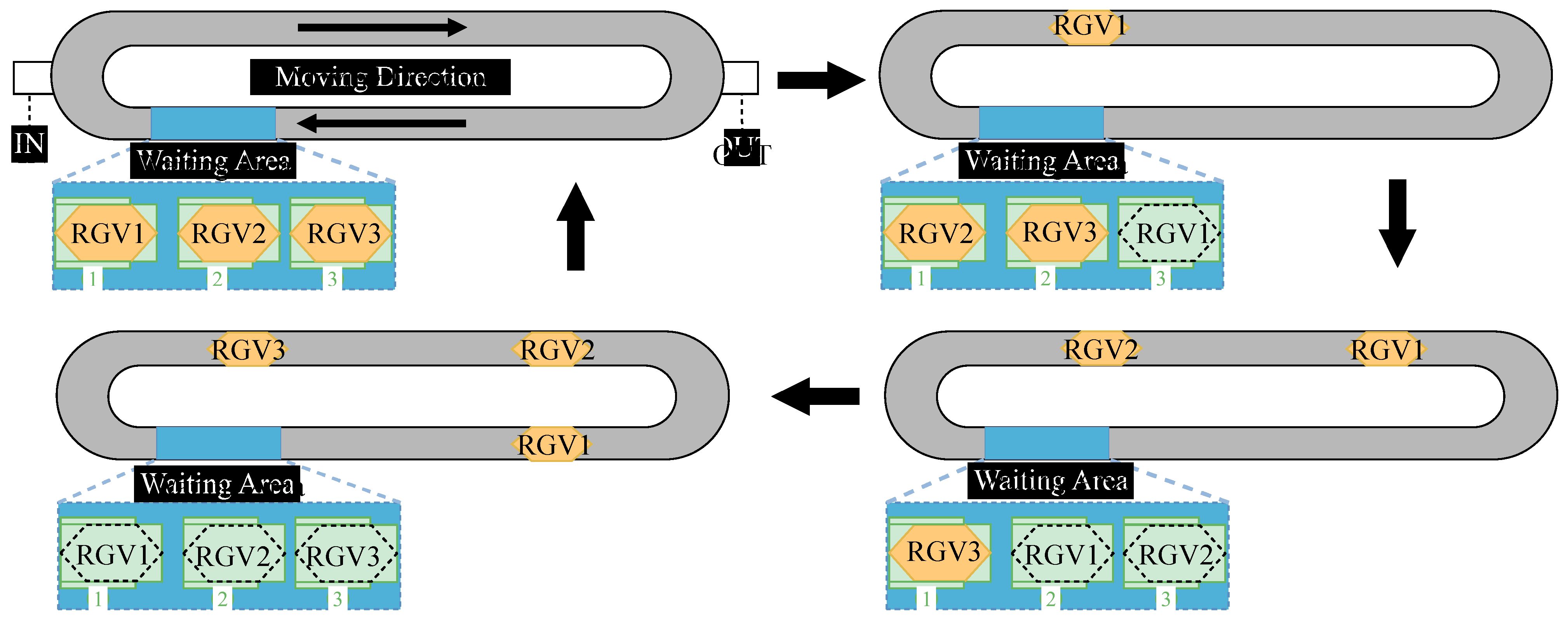
Figure 11, all tasks are processed continuously and efficiently under buffer and collision constraints, demonstrating the model’s applicability and feasibility in practical static warehouse environments.
In the
Figure 11b, the horizontal coordinate indicates the time, the vertical coordinate indicates the transportation machine and the buffer zone, the number of each rectangular box in the
Figure 11b indicates the number of the goods, the left side of the rectangular box indicates the start time, the right side indicates the end time, if the transportation time or buffer waiting time is 0, then the left side of the rectangular box solid line and the right side of the solid line overlap, for a vertical line. As can be seen from the data in the figure, the scheduling results obtained by the algorithm proposed in this paper are practical and feasible, the goods in and out of the warehouse arrangement are more compact, the load of each device is more balanced, and the utilization rate is high. In addition, through reasonable scheduling, the four buffer zones generally have no large accumulation of goods, and the overall system is not seriously blocked. Compared with the original order queue as
Figure 11a, the maximum completion time is reduced by 30.1%.
5.3. Validation of Zero-Wait Strategy
To verify the practical value of the zero-waiting RGV/ASR storage system access model proposed in this paper, considering a finite buffer, the time of each transportation process for the first 10 transportation tasks of the above scheduling results is analyzed, and the results are shown in
Table 5.
As shown in the table, the difference between the ideal transportation time and the actual transportation time of the scheduling result for each transportation process of each task is always 0. From this, it can be seen that the buffer zone is ready to store the goods before the machine transports the goods to the next destination, and the result of this paper realizes the zero-waiting under the load state of the RGV and the ASR, and the goods can be transported to the target location in a fast and continuous way, which reduces the time of the goods’ stranded. It avoids blockage and congestion in the transportation system and ensures the continuous operation of the means of transportation and the smooth flow of goods. This will improve the fluidity of logistics, reduce the retention and accumulation of goods, reduce the risk of loss and expiration of goods, and greatly improve the stability and reliability of the transportation system, reducing the risk of transportation disruptions and delays.
5.4. Algorithm Comparison
To further validate the optimization performance of the proposed AMHS algorithm in addressing the zero-wait scheduling problem in HRS with finite buffers, a set of random test cases was generated. Specifically, the x-coordinates were randomly selected within the range [1, 196], and the y-coordinates within [1, 12]. This process was repeated 15 times to create 15 unique test cases. In each case, the number of inbound and outbound tasks is equal. Each instance is named using the format “J{task number}”. For example, “J100” refers to an instance with 100 tasks.
To evaluate the effectiveness of the improved search operators in the AMHS algorithm, this section first investigates three basic algorithms: Genetic Algorithm (GA) [
40], Discrete Imperialist Competitive Algorithm (DICA) [
41], and Improved Whale Optimization Algorithm (IWOA) [
42]. The performance of GA, DICA, and IWOA algorithms was optimized through parameter tuning as follows: For GA, the optimal parameters were a population size of 70, crossover rate of 0.8, and mutation rate of 0.1, balancing exploration and exploitation. For DICA, the best performance was achieved with 20 imperialists, a revolution rate of 0.4, and an assimilation rate of 0.2, which effectively balanced global and local search. For IWOA, the optimal parameters were a population size of 60, weight factor of 0.6, and scaling factor of 0.2, which ensured the best convergence speed and solution quality.
Additionally, two variants based on the AMHS algorithm are designed: the first variant, IGPSO, is created by removing the self-learning mechanism and replacing the feedback-based local enhancement operator with standard Particle Swarm Optimization (PSO); the second variant, Standard Local Genetic Algorithm (SLGA), is obtained by removing the feedback-based local enhancement operator. The comparative results are presented in
Table 6.
The statistics in the table show that the OA of the proposed AMHS algorithm for multiple solutions outperforms the other five algorithms. The APRE metrics further indicate that, across different experiments, the relative percentage of average deviation generated by the AMHS algorithm is consistently better for most solutions compared to the other algorithms. This demonstrates the superiority and stability of the proposed AMHS in solving these types of problems.
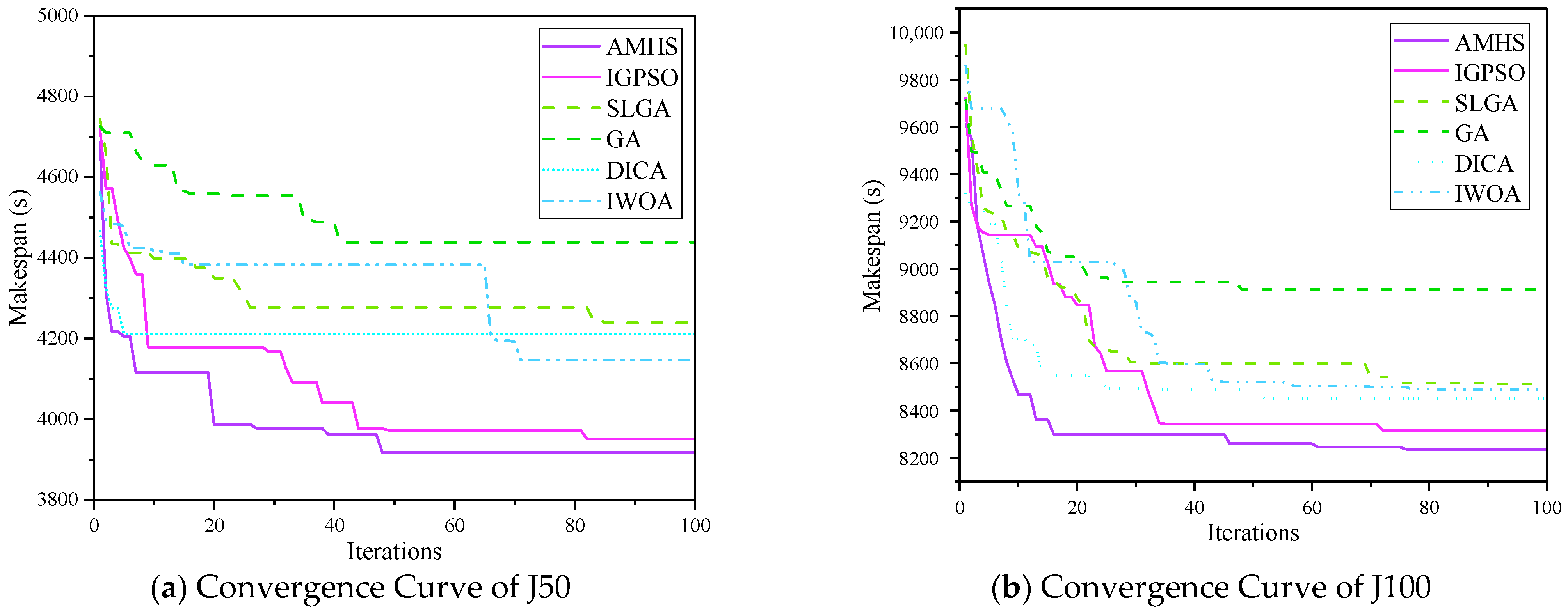
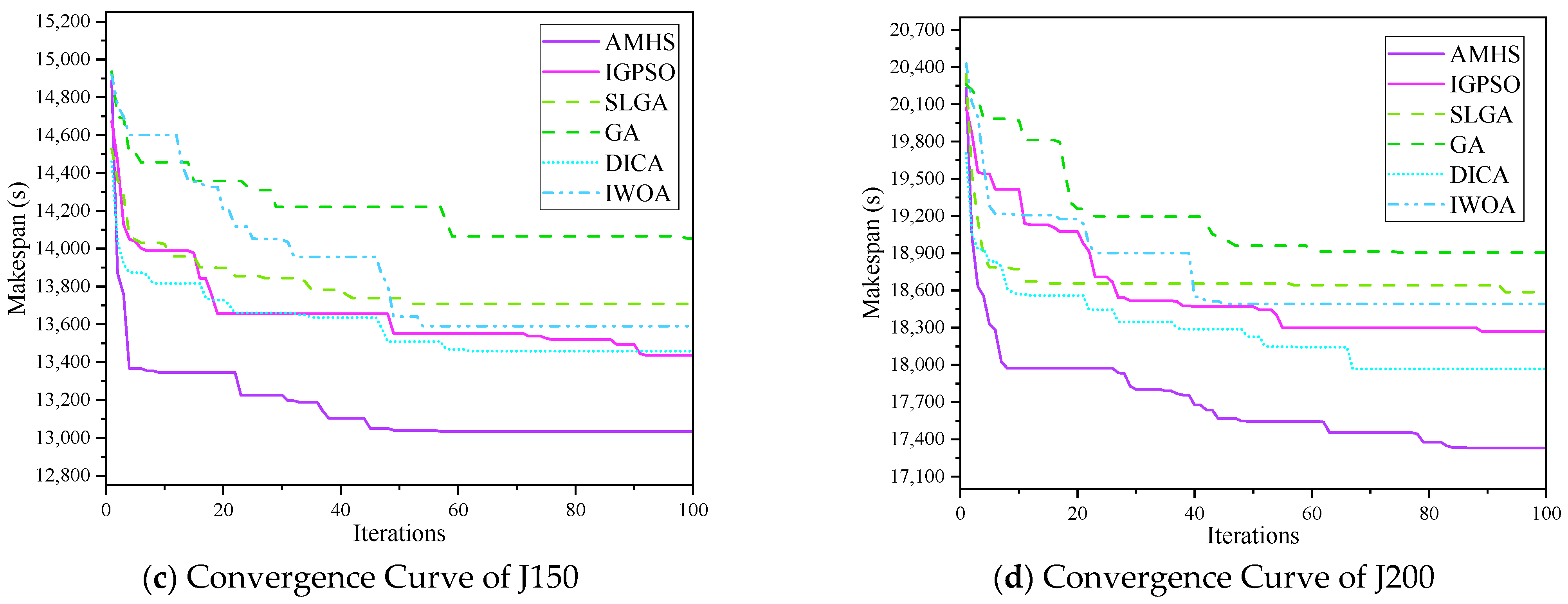
To further validate the efficiency and stability of the proposed algorithm, convergence behaviors were compared. The results are illustrated in
Figure 12, which presents the convergence curves of the six algorithms over 100 iterations.
As shown in
Figure 12, the proposed AMHS algorithm achieves faster convergence and reaches a lower final objective value compared to DICA, GA, and IWOA. In contrast to the IGPSO, and the SLGA, the AMHS algorithm outperforms these models, achieving lower Makespan values across all task scales (J50, J100, and J200). This further confirms that both the hormonal regulation mechanism and the local enhancement search operators are crucial for enhancing the robustness and stability of the algorithm, reducing variability during optimization, and improving overall task scheduling efficiency. These findings demonstrate that the proposed algorithm not only enhances scheduling efficiency but also improves result stability, reducing the uncertainty of task execution.
In summary, the AMHS algorithm proves effective for solving the zero-wait scheduling problem in RGV/ASR warehousing systems with finite buffers. First, the elite solution initialization strategy introduces high-quality individuals early in the search, providing a strong foundation for subsequent optimization. Second, the global search operator enhances exploration capability by adjusting task scheduling orders and expanding the solution space. Finally, inspired by biological hormone regulation mechanisms, a local search operator and a perturbation-based reconstruction strategy are employed to refine local search and prevent premature convergence. Together, these components ensure that the AMHS algorithm achieves both high efficiency and solution quality in complex scheduling environments.
5.5. Scheduling Application
To demonstrate the real-world applicability of the proposed scheduling model, the AMHS algorithm has been integrated into a customized Warehouse Management System (WMS) developed for a salt production and distribution enterprise.
The graphical user interface (GUI) of the WMS is shown in
Figure 13 and
Figure 14, which visualize the scheduling results of ASRs and RGVs, respectively. The Gantt chart interface clearly displays the execution timeline and task assignments for each machine. Color-coded bars represent individual tasks, and tooltip overlays provide key metadata such as task ID, start time, and completion time, enabling operators to review task sequences and operational efficiency in detail.
The scheduling module, powered by the AMHS algorithm, has been deployed in the actual warehouse system, where it supports daily operations. While the performance evaluation in this study is simulation-based due to enterprise data confidentiality, the successful integration of the algorithm into an industrial WMS demonstrates its engineering feasibility and practical utility.
6. Conclusions and Future Work
This paper presents the inbound/outbound scheduling problem of a zero-waiting RGV/ASR storage system considering a finite buffer, and a kind of improved Adaptive AMHS algorithm is proposed to solve the problem. The main works are as follows: First, the architecture of the zero-waiting RGV/ASR storage system is designed in detail. And taking a packaged salt storage case as a specific production scenario, construct a mathematical model to describe the entire inbound/outbound process. Secondly, analyzing the multi-RGV same-track problem and establishing a rule-binding-based model of the multi-RGV collision avoidance and zero-waiting. Third, this paper designs the global search operator, the local search operator, and the perturbation operator, which improve the search efficiency of the AMHS algorithm. Specifically, this paper uses a set of inbound/outbound data of a realistic packaged salt storage case. And the superiority of the AMHS algorithm is verified by comparing it against three heuristic and meta-heuristic algorithms in 15 random case sets.
There are some directions for future work. (1) Collecting the historical operation data of RGV/ASR storage system, feature extraction and learning, and constructing a data-driven scheduling model; (2) Integrating the proposed RGV/ASR storage model with location optimization to improve the global efficiency of the warehouse system; (3) Introducing perturbation in the problem for the real-time state of packaged salt transportation factors to realize real-time scheduling of RGV/ASR storage system.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}