
Output Feedback Control of Dual-Valve Electro-Hydraulic Valve Based on Cascade Structure Extended State Observer Systems with Disturbance Compensation

 and
and 
Abstract
1. Introduction
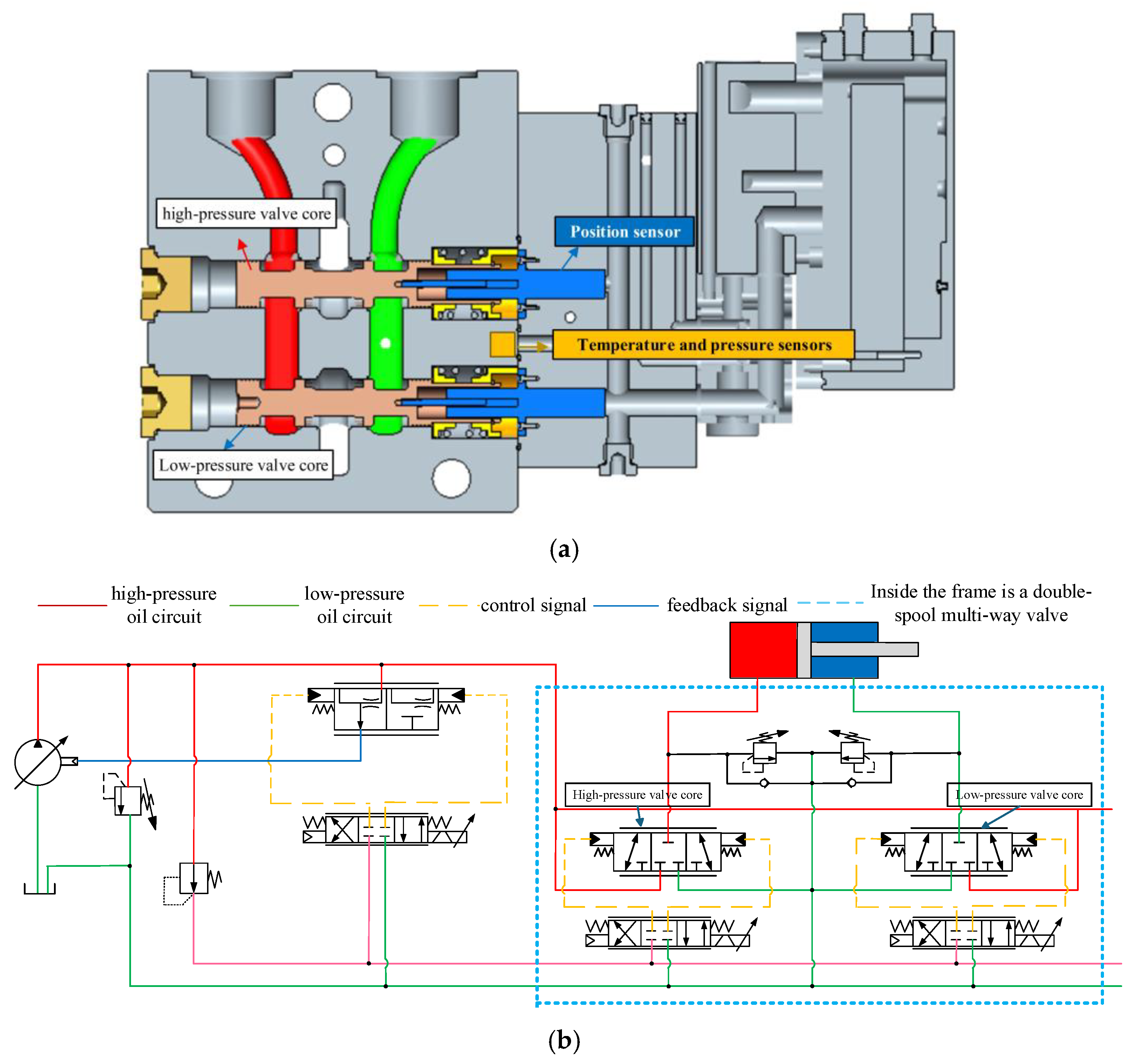
2. Problem Formulation
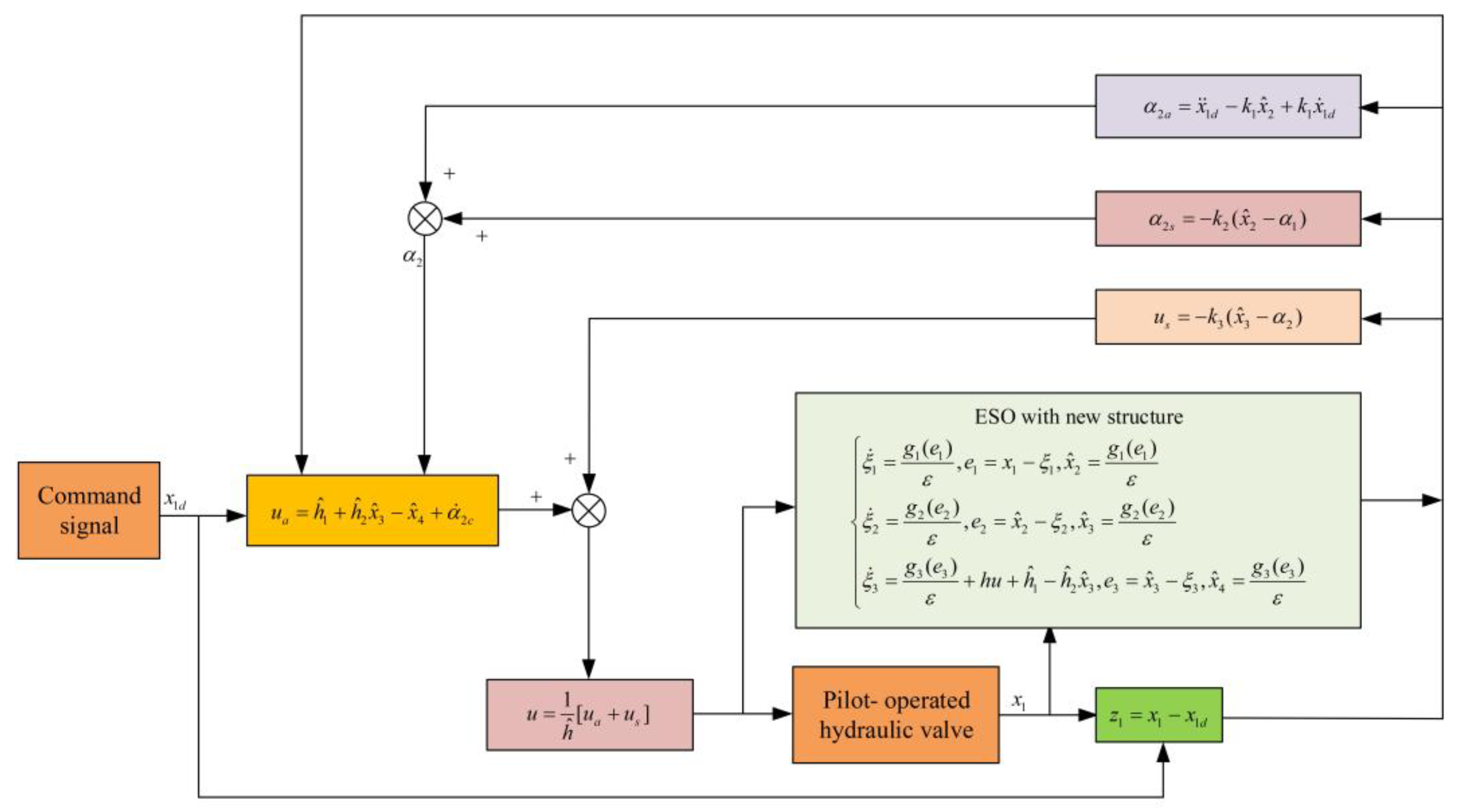
3. Cascade Observer and Output Feedback Controller Design
3.1. Preliminary Assumptions of Controller Design
3.2. Design of Extended State Observer with Cascade Structure
3.3. Convergence Analysis of the Observer
3.4. Design of Output Feedback Controller
3.5. Proof of Convergence of Backstepping Controller
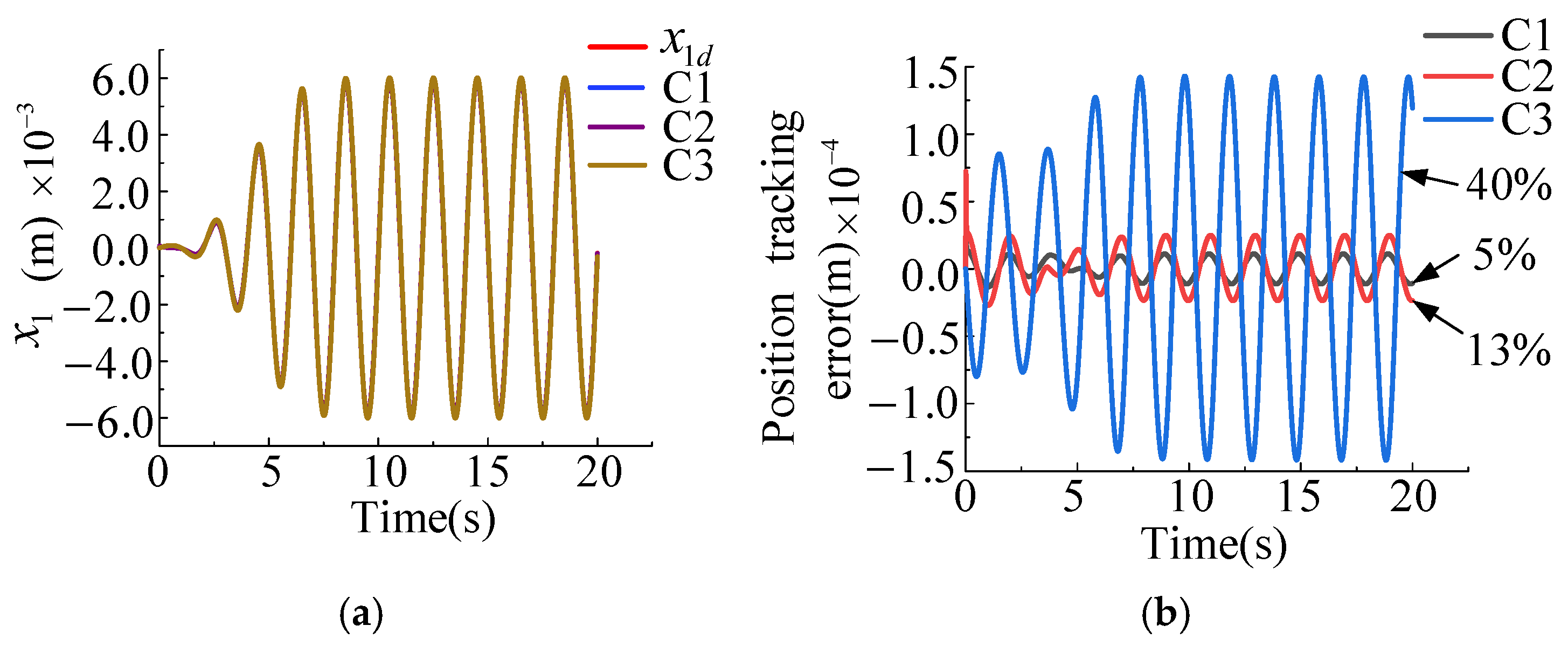
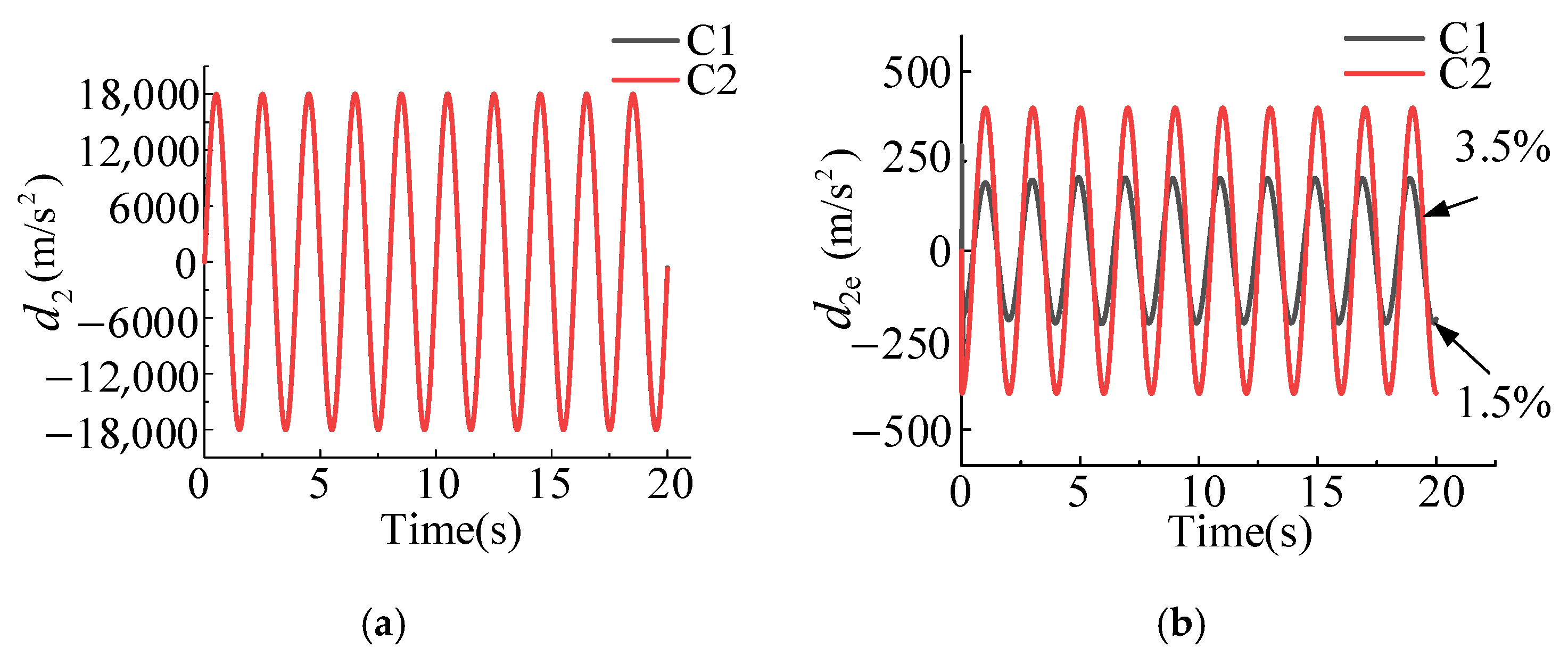
4. Application Verification
- Case 1: Given the external disturbance signal and given the valve core position command signal is .
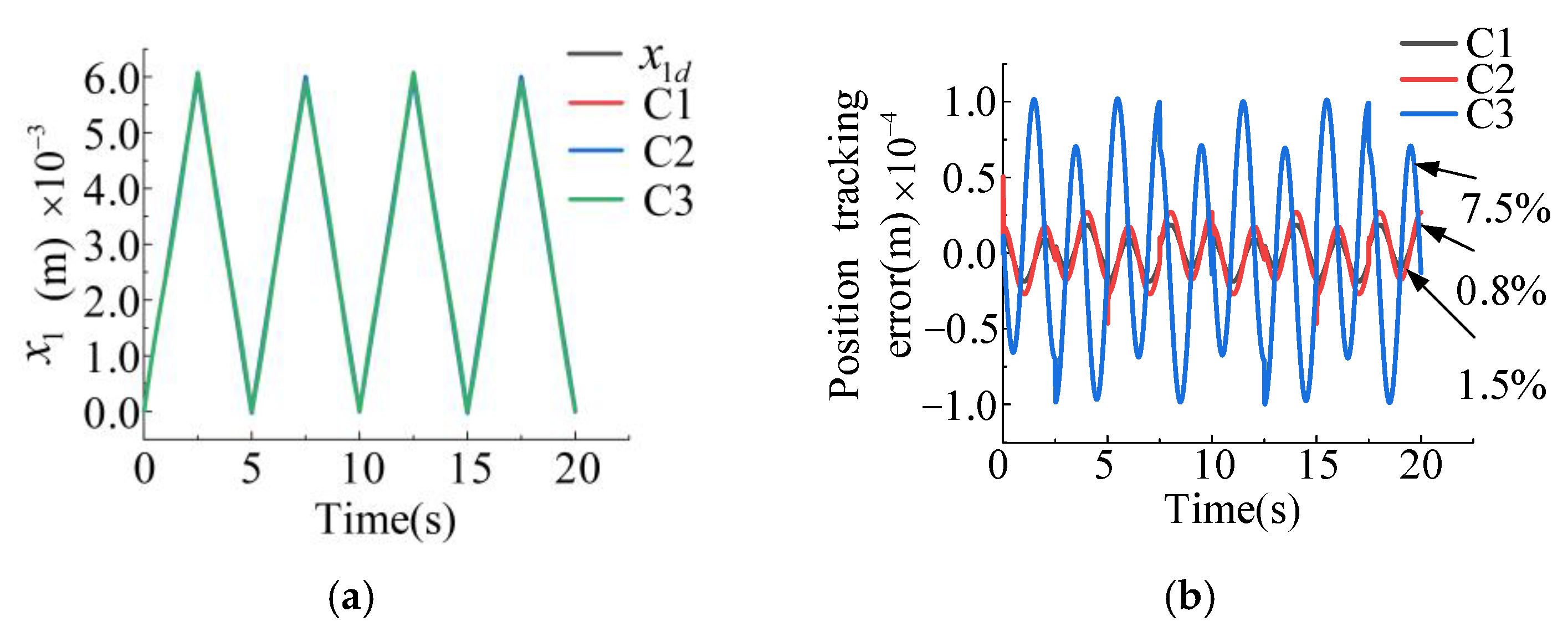
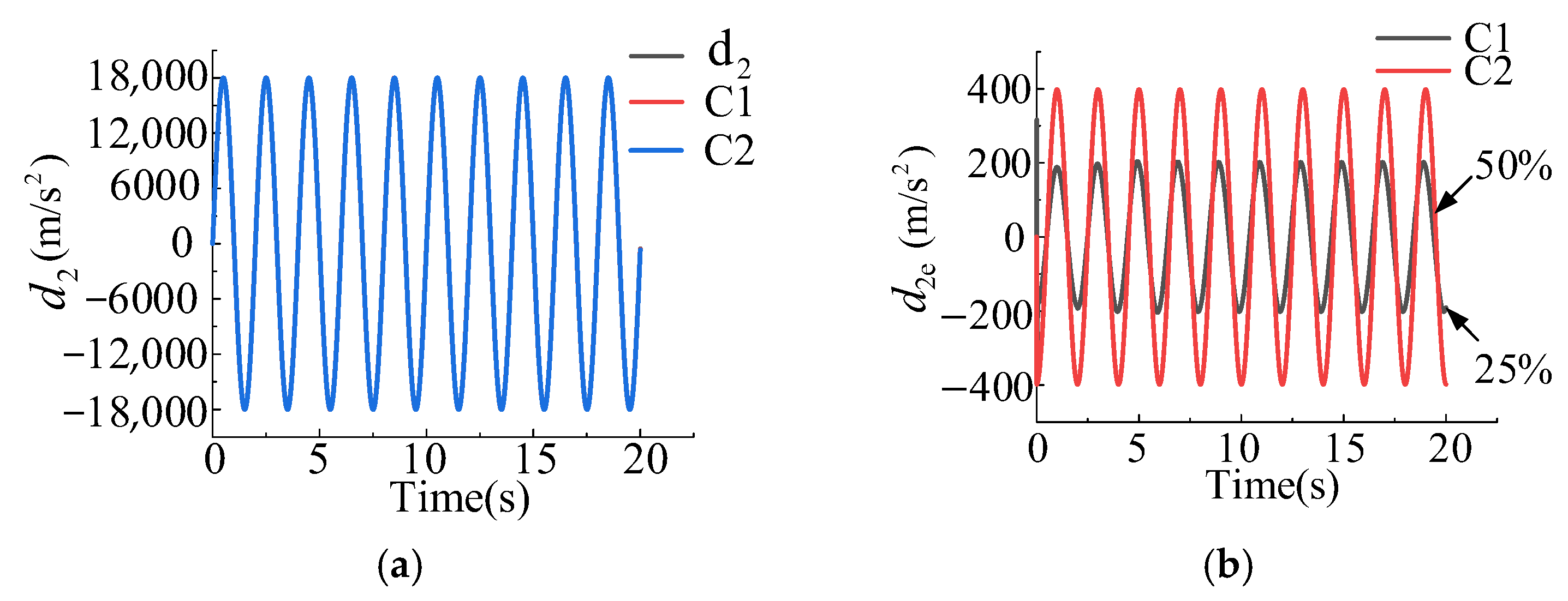
- Case 2: The given valve core position command signal is a triangular wave with a cycle of 5 s and a stroke of 0–6 mm and the given external disturbance signal is .
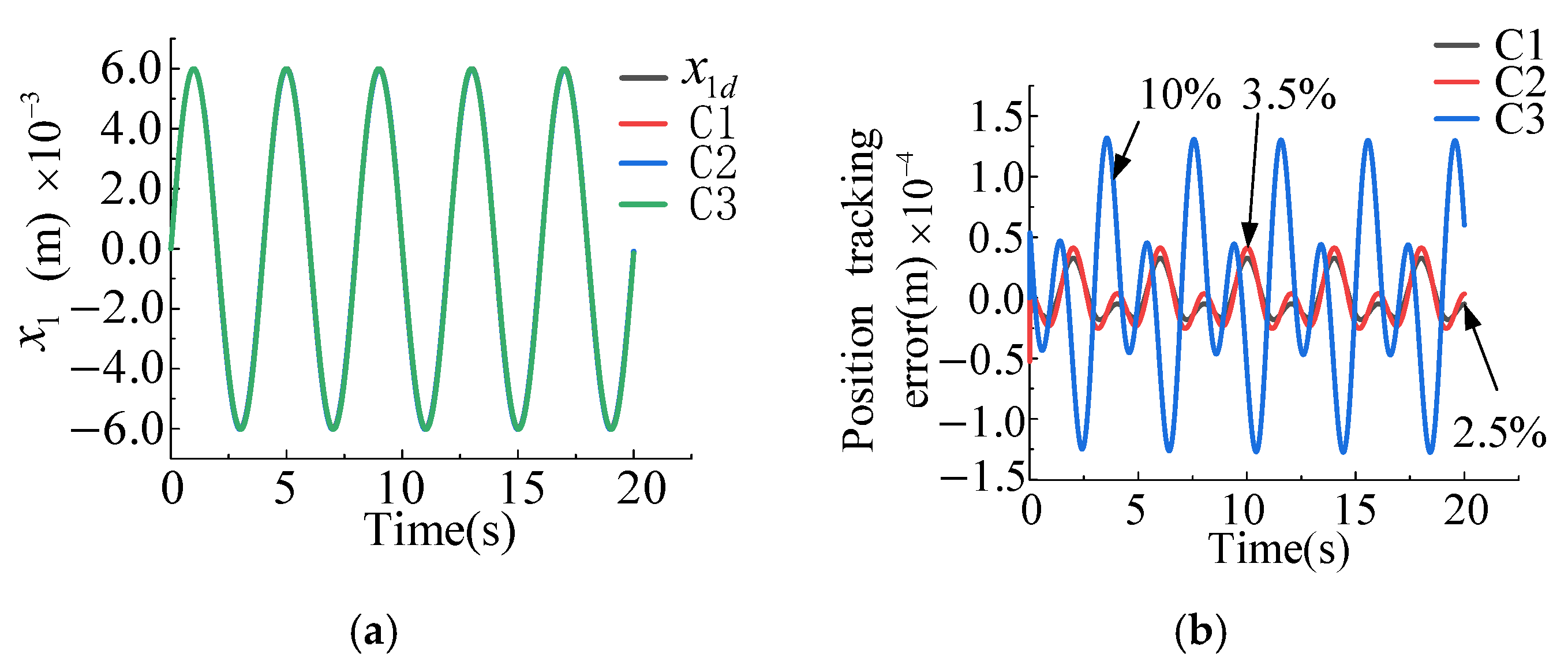
- Case 3: The given valve core position command signal is and the given external disturbance signal is .
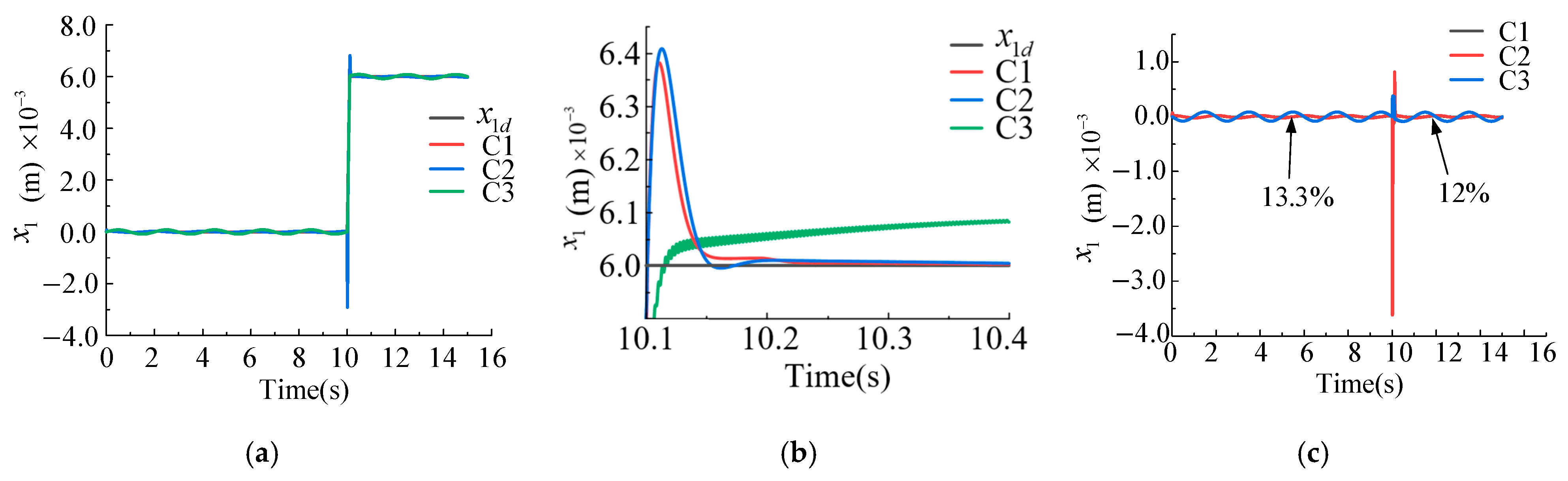
- Case 4: The given external disturbance signal is , and the given valve core position command signal is .
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| LESO | Linear extended state observer |
| USE | Uniform exponential stability |
| IARC | Indirect adaptive robust control |
| DT-SMC | Discrete-time sliding mode controller |
| ADRC | Active disturbance rejection control |
| GESO | Generalized extended state observer |
| DCMSS | Disturbance compensation motion control system for servo motors |
| LVDT | Linear variable differential transformer |
| ESO | Extended state observer |
| PID | Proportional-integral-derivative |
| Parameter Explanations | |
| Supply pressure | |
| Left chamber pressure of the main valve | |
| Pressure bearing area of the left chamber of the main valve | |
| Main valve core quality | |
| Volume of the left chamber of the main valve | |
| Initial volume of the left chamber of the main valve | |
| Elastic bulk modulus | |
| Control input voltage | |
| Pilot valve flow coefficient | |
| Load flow rate input to the main valve | |
| Return pressure | |
| Main valve right chamber pressure | |
| Pressure bearing area of the right chamber of the main valve | |
| Viscous friction coefficient | |
| Volume of the right chamber of the main valve | |
| Initial volume of the right chamber of the main valve | |
| Main valve core driving force | |
| Main valve spring stiffness | |
| Hydraulic oil density | |
| Pilot valve electrical gain coefficient | |
| Represents the modeling error including nonlinear friction and the concentrated disturbance caused by external disturbances | |
| System load force modeling error | |
| State variable | |
| Flow gain corresponding to the displacement of the pilot valve core, | |
| Expected load pressure signal | |
| Define error vector | |
| System modeling error | |
| State-transition matrix of the system | |
| Disturbance in the system | |
| Hurwitz matrix | |
| Positive-definite matrix | |
References
- Yao, B.; Bu, F.; Reedy, J.; Chiu, G.T.C. Adaptive robust motion control of single-rod hydraulic actuators: Theory and experiments. In Proceedings of the 1999 American Control Conference (Cat. No. 99CH36251), San Diego, CA, USA, 2–4 June 1999; Volume 2, pp. 759–763. [Google Scholar] [CrossRef]
- Guan, C.; Pan, S. Nonlinear Adaptive Robust Control of Single-Rod Electro-Hydraulic Actuator with Unknown Nonlinear Parameters. IEEE Trans. Control. Syst. Technol. 2008, 16, 434–445. [Google Scholar] [CrossRef]
- Sun, W.; Gao, H.; Yao, B. Adaptive Robust Vibration Control of Full-Car Active Suspensions with Electrohydraulic Actuators. IEEE Trans. Control. Syst. Technol. 2013, 21, 2417–2422. [Google Scholar] [CrossRef]
- Mohanty, A.; Yao, B. Indirect Adaptive Robust Control of Hydraulic Manipulators with Accurate Parameter Estimates. IEEE Trans. Control. Syst. Technol. 2011, 19, 567–575. [Google Scholar] [CrossRef]
- Wei, Y.; Qian, L.; Nie, S.; Yin, Q. Adaptive Backstepping Sliding Mode Control for Electro-hydraulic Position Servo System of The Artillery Projectile Transfer Arm. In Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 December 2019; pp. 893–898. [Google Scholar] [CrossRef]
- Lin, Y.; Shi, Y.; Burton, R. Modeling and Robust Discrete-Time Sliding-Mode Control Design for a Fluid Power Electrohydraulic Actuator (EHA) System. IEEE/ASME Trans. Mechatron. 2013, 18, 1–10. [Google Scholar] [CrossRef]
- Fang, Y.; Jiao, Z.; Wang, W.; Sao, P. Adaptive backstepping sliding mode control for hydraulic servo position systems of rolling mills. J. Electr. Mach. Control. 2011, 15, 95–100. [Google Scholar] [CrossRef]
- Guo, Q.; Yin, J.; Yu, T.; Jiang, D. Saturated Adaptive Control of an Electrohydraulic Actuator with Parametric Uncertainty and Load Disturbance. IEEE Trans. Ind. Electron. 2017, 64, 7930–7941. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J. Output feedback control of electro-hydraulic servo actuators with matched and mismatched disturbances rejection. J. Frankl. Institute. 2019, 356, 9152–9179. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Zhou, L.; Cheng, L.; Pan, C.; Jiang, Z. Generalized Extended State Observer Based Speed Control for DC Motor Servo System. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 221–226. [Google Scholar] [CrossRef]
- Kim, W.; Won, D.; Shin, D.; Chung, C.C. Output feedback nonlinear control for electro-hydraulic systems. Mechatronics 2012, 22, 766–777. [Google Scholar] [CrossRef]
- El Yaagoubi, E.H.; El Assoudi, A.; Hammouri, H. High gain observer: Attenuation of the peak phenomena. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 5, pp. 4393–4397. [Google Scholar] [CrossRef]
- Khalil, H.K. High-Gain Observers in Feedback Control: Application to Permanent Magnet Synchronous Motors. IEEE Control. Syst. Mag. 2017, 37, 25–41. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, J.; Shi, D.; Wu, J.; Shi, L. Event-Triggered Sampled-Data Control: An Active Disturbance Rejection Approach. IEEE/ASME Trans. Mechatron. 2019, 24, 2052–2063. [Google Scholar] [CrossRef]
- Chong, M.S.; Nešić, D.; Postoyan, R.; Kuhlmann, L. Parameter and State Estimation of Nonlinear Systems Using a Multi-Observer Under the Supervisory Framework. IEEE Trans. Autom. Control. 2015, 60, 2336–2349. [Google Scholar] [CrossRef]
- Sanfelice, R.G.; Praly, L. On the performance of high-gain observers with gain adaptation under measurement noise. Automatica 2011, 47, 2165–2176. [Google Scholar] [CrossRef]
- Astolfi, D.; Marconi, L. A High-Gain Nonlinear Observer with Limited Gain Power. IEEE Trans. Autom. Control 2015, 60, 3059–3064. [Google Scholar] [CrossRef]
- Ran, M.; Li, J.; Xie, L. A new extended state observer for uncertain nonlinear systems. Automatica 2021, 131, 109772. [Google Scholar] [CrossRef]
- Lin, Z.; Yao, J.; Deng, W. Input constraint control for hydraulic systems with asymptotic tracking. ISA Trans. 2022, 129, 616–627. [Google Scholar] [CrossRef] [PubMed]
- Rugh, W.J. Linear System Theory, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Character | Meaning | Character | Meaning |
|---|---|---|---|
| Supply pressure | Return pressure | ||
| Left chamber pressure of the main valve | Main valve right chamber pressure | ||
| Pressure bearing area of the left chamber of the main valve | Pressure bearing area of the right chamber of the main valve | ||
| Main valve core quality | Viscous friction coefficient | ||
| Volume of the left chamber of the main valve | Volume of the right chamber of the main valve | ||
| Initial volume of the left chamber of the main valve | Initial volume of the right chamber of the main valve | ||
| Elastic bulk modulus | Main valve core driving force | ||
| Control input voltage | Main valve spring stiffness | ||
| Pilot valve flow coefficient | Hydraulic oil density | ||
| Load flow rate input to the main valve | Pilot valve electrical gain coefficient | ||
| Represents the modeling error including nonlinear friction and the concentrated disturbance caused by external disturbances | Define error vector | ||
| System load force modeling error | System modeling error | ||
| State variable | State-transition matrix of the system | ||
| Flow gain corresponding to the displacement of the pilot valve core, | Disturbance in the system | ||
| Expected load pressure signal | Hurwitz matrix | ||
| Positive-definite matrix |
| Parameter Name | Value | Parameter Name | Value |
|---|---|---|---|
| (kg) | 1.05 | (Pa) | |
| (m2) | (N/m) | 15,580 | |
| (m3) | (N/(m/s)) | 350 | |
| (Pa) | (Pa) | 0 | |
| Controller | Model Parameters |
|---|---|
| C1 | |
| C2 | |
| C3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, C.; Li, S.; Kong, X.; Ma, H.; Yu, Z.; Ai, C.; Jiang, Y. Output Feedback Control of Dual-Valve Electro-Hydraulic Valve Based on Cascade Structure Extended State Observer Systems with Disturbance Compensation. Machines 2025, 13, 392. https://doi.org/10.3390/machines13050392
Jia C, Li S, Kong X, Ma H, Yu Z, Ai C, Jiang Y. Output Feedback Control of Dual-Valve Electro-Hydraulic Valve Based on Cascade Structure Extended State Observer Systems with Disturbance Compensation. Machines. 2025; 13(5):392. https://doi.org/10.3390/machines13050392
Chicago/Turabian StyleJia, Cunde, Shaoguang Li, Xiangdong Kong, Hangtian Ma, Zhuowei Yu, Chao Ai, and Yunhong Jiang. 2025. "Output Feedback Control of Dual-Valve Electro-Hydraulic Valve Based on Cascade Structure Extended State Observer Systems with Disturbance Compensation" Machines 13, no. 5: 392. https://doi.org/10.3390/machines13050392
APA StyleJia, C., Li, S., Kong, X., Ma, H., Yu, Z., Ai, C., & Jiang, Y. (2025). Output Feedback Control of Dual-Valve Electro-Hydraulic Valve Based on Cascade Structure Extended State Observer Systems with Disturbance Compensation. Machines, 13(5), 392. https://doi.org/10.3390/machines13050392